modelarea asistata a sistemelor mecanice
TRANSCRIPT
7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 1/8
P a g e | 1
UniversitateaTransilvania din Braşov
Facultatea Design de produsşimediu
Dpt: Design de produs,mecatronicăşimediu
Modelarea asistata asistemelor mecanice
-proiect-
Student: Ene Emanuel-Stefan
Coordonatorproiect:Şe ucr.dr.ing. CIOBANU DANIE ASectia: DI
!rupa: "#"""
An: I$
2014-2015
7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 2/8
2 | P a g e
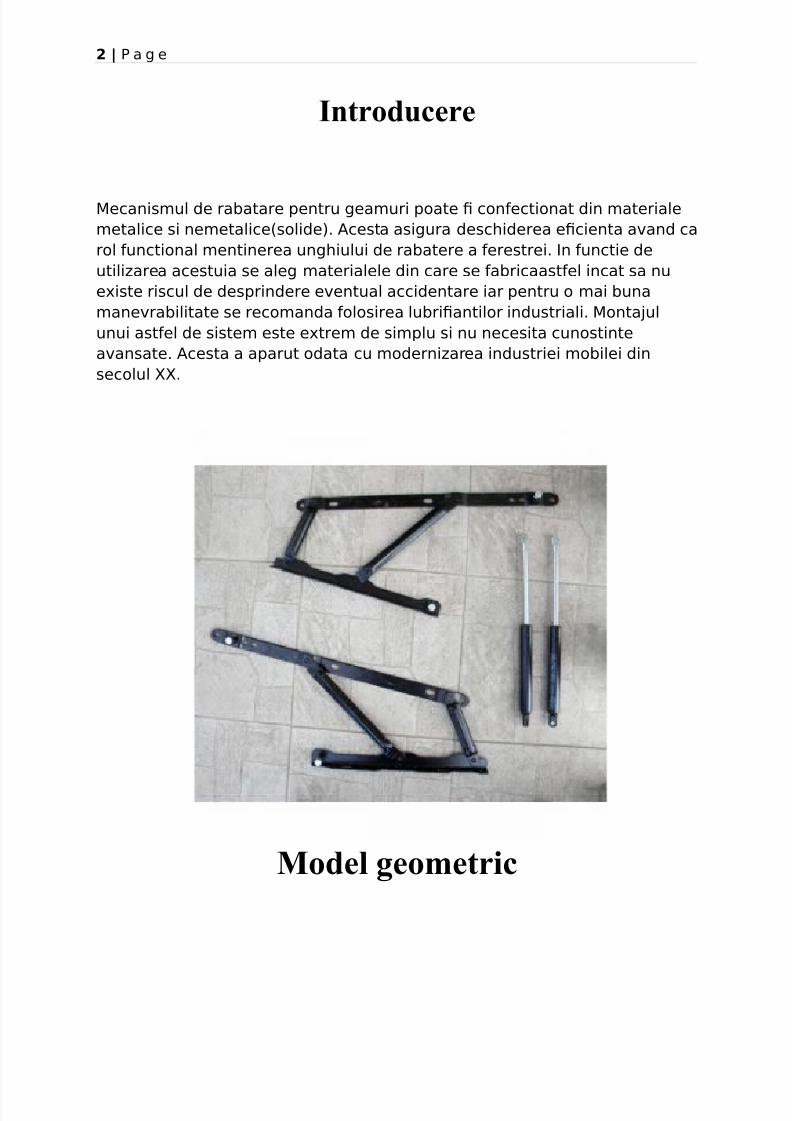
Introducere
Mecanismul de rabatare pentru geamuri poate f con ectionat din materialemetalice si nemetalice(solide). cesta asigura desc!iderea efcienta a"and carol unctional mentinerea ung!iului de rabatere a erestrei. #n unctie deutili$area acestuia se aleg materialele din care se abricaast el incat sa nue%iste riscul de desprindere e"entual accidentare iar pentru o mai bunamane"rabilitate se recomanda olosirea lubrifantilor industriali. Monta&ulunui ast el de sistem este e%trem de simplu si nu necesita cunostintea"ansate. cesta a aparut odata cu moderni$area industriei mobilei dinsecolul ''.
Model geometric

7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 3/8
3 | P a g e
#dentifcareaelementelor a cuplelor calculul
7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 4/8
4 | P a g e
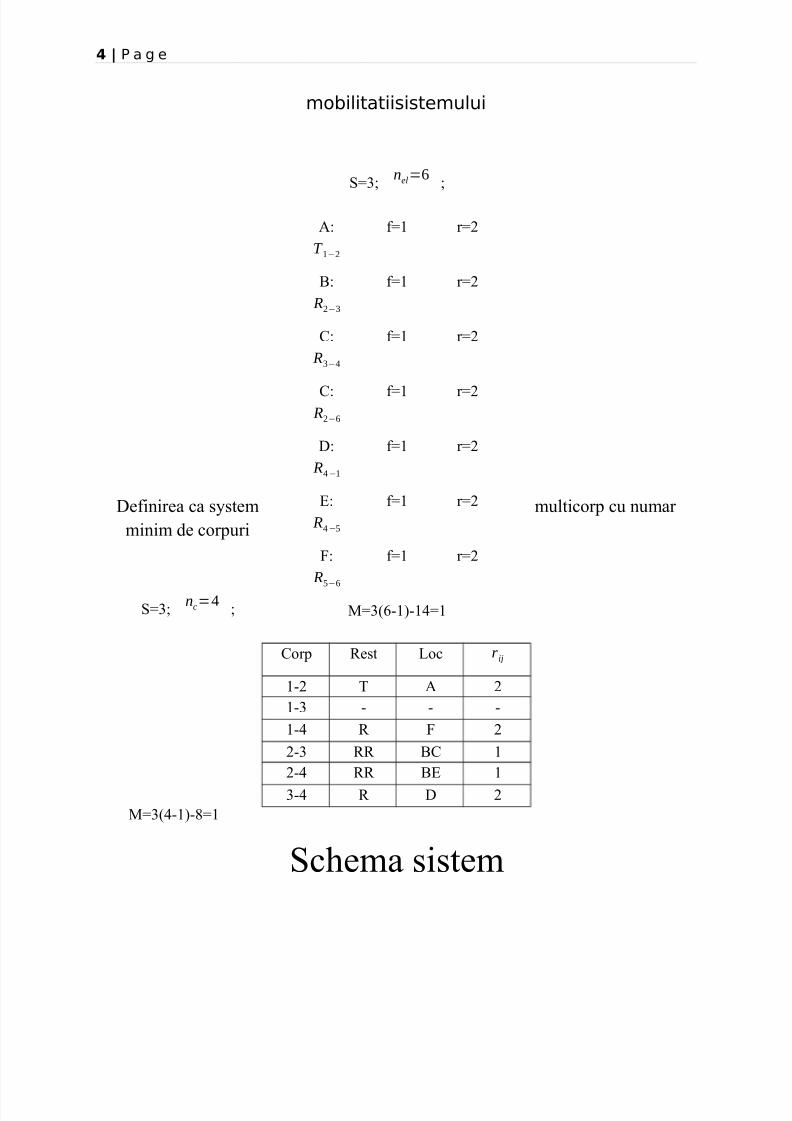
mobilitatiisistemului
S=3; nel= 6;
Definirea ca system multicorp cu numar minim de corpuri
S=3; nc= 4;
M=3(4-1)-8=1
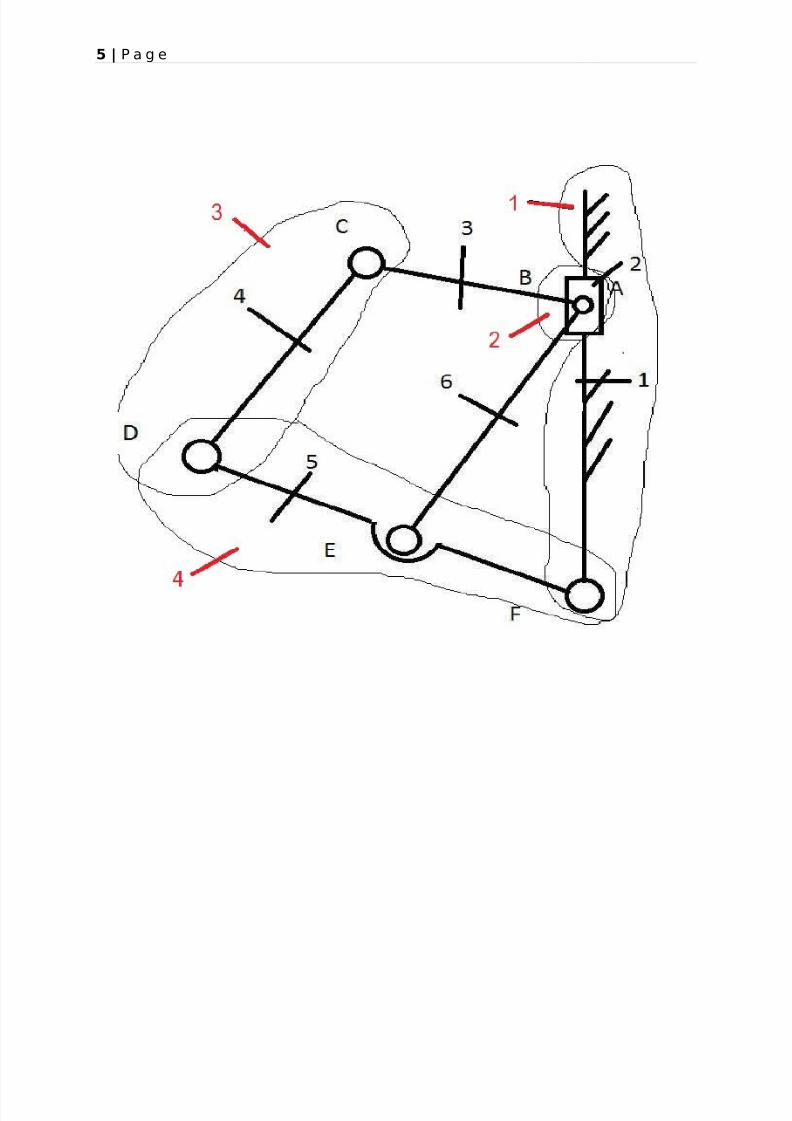
Schema sistem
AT 1 − 2
f=1 r=!
" R2 − 3
f=1 r=!
# R3 − 4
f=1 r=!
# R2 − 6
f=1 r=!
D R4 − 1
f=1 r=!
$ R4 − 5
f=1 r=!
% R5 − 6
f=1 r=!
M=3(&-1)-14=1
#orp 'est oc r ij
1-! A !1-3 - - -1-4 ' % !!-3 '' "# 1!-4 '' "$ 13-4 ' D !
7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 5/8
5 | P a g e
7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 6/8
6 | P a g e
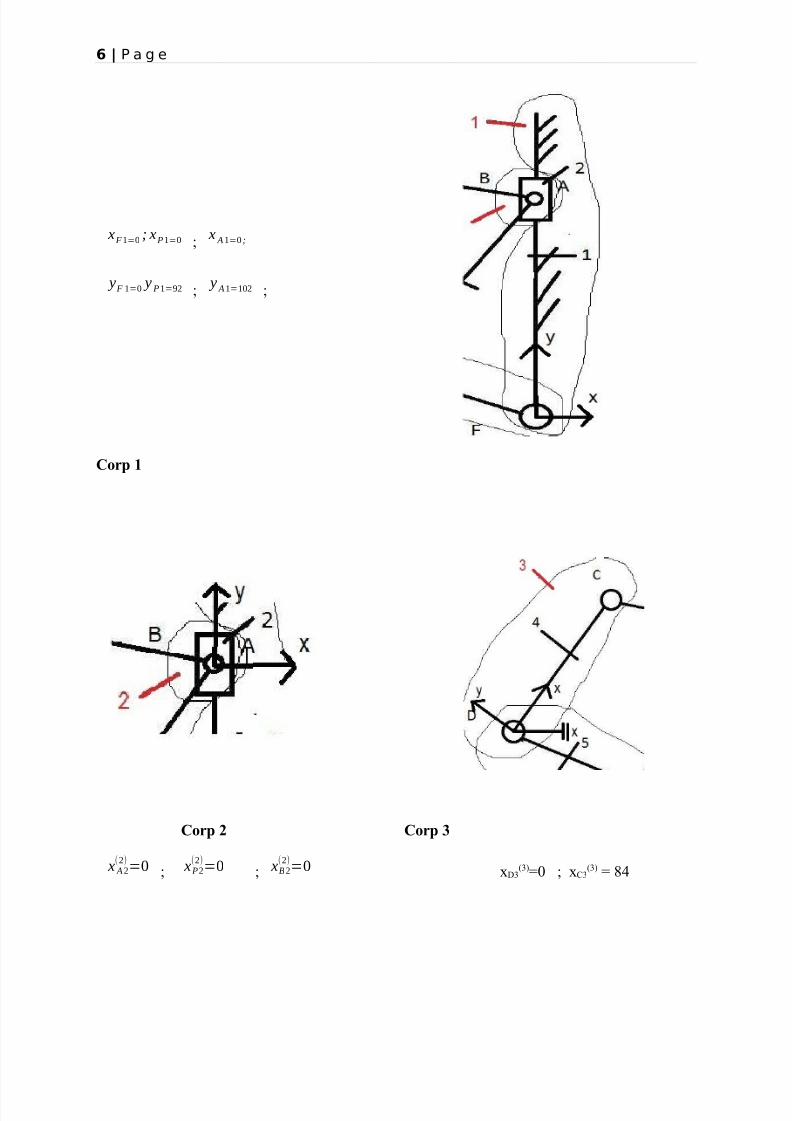
x F 1 = 0 ; x P 1 = 0 ; x A1 = 0 ;
y F 1 = 0 y P 1 = 92 ; y A1 = 102 ;
Corp 1
Corp 2 Corp 3
x A 2(2 )= 0 ; x P 2
(2 )= 0 ; xB 2(2 )= 0 *D3
(3)=+ ; * #3(3) = 84
7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 7/8
7 | P a g e
y A2(2 )= 10 ; y P 2
(2 )=− 10 ; yB 2(2 )= 0 yD3
(3) = + ; y #3(3) = +
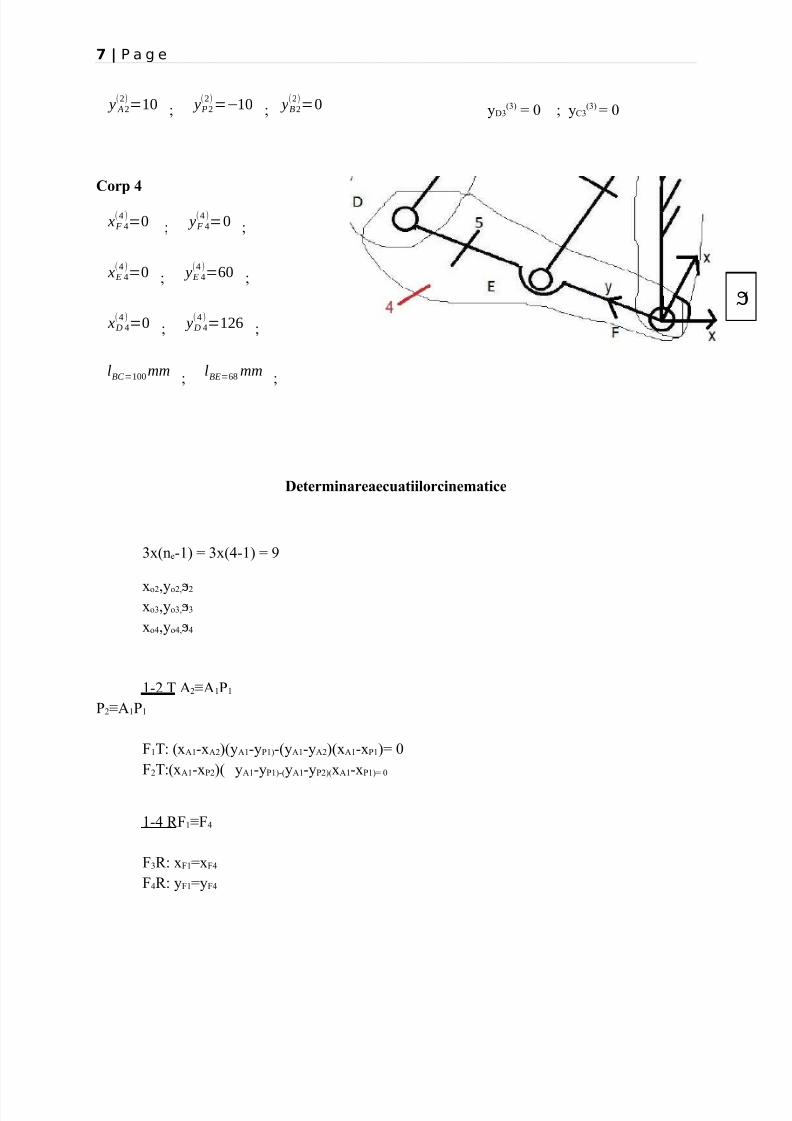
Corp 4
x F 4(4 )= 0 ; y F 4
(4 )= 0 ;
x E 4(4 )= 0 ; y E 4
(4 )= 60 ;
x D 4(4 )= 0 ; y D 4
(4 )= 126 ;
lBC = 100 mm ; lBE= 68 mm ;
Determinareaecuatiilorcinematice
3*(n e-1) = 3*(4-1) = ,
*o! yo! ϧ !
*o3 yo3 ϧ 3
*o4 yo4 ϧ 4
1-! A ! .A 1/ 1
/ ! .A 1/ 1
%1 (*A1-*A! )(y A1-y /1) -(y A1-yA! )(* A1-* /1 )= +%! (*A1-* /! )( y A1-y /1)-( yA1-y /!)( *A1-* /1)= +
1-4 '% 1.% 4
%3' * %1=* %4
%4' y %1=y %4
ϧ
7/24/2019 modelarea asistata a sistemelor mecanice
http://slidepdf.com/reader/full/modelarea-asistata-a-sistemelor-mecanice 8/8
8 | P a g e
!-3 '' " ! # 3=ct
%0'' (* "! -*#3 )! (2 "! -2 #3 )! =l !"#
!-4 ''" ! # 4=ct
%&'' (* "! -*#3 )! (y "! -*#3 )! =l ! "#
3-4 'D 3=D 4
%1' * D3= * D4
%8' y D3=yD4
%, %(t)=+