m. voicu, ia (i) c1 (3 7) 1 · globul ocular muşchi de deschidere informa ţ ie vizuală retina...
TRANSCRIPT
M. Voicu, IA (I)M. Voicu, IA (I) C1 (37)C1 (37) 11
Universitatea Tehnică „Gheorghe Asachi”, IaşiFacultatea de Automatică şi Calculatoare
2013 – 2014
IntroducereIntroducere îîn automaticăn automaticăAnul II, semestrul 4
M. Voicu, IA (I)M. Voicu, IA (I) C1 (37)C1 (37) 22
Suportul de curs se bazează pe manualul:
www.mvoicu.intr-automatica.ac.tuiasi.rowww.mvoicu.intr-automatica.ac.tuiasi.ro
M. Voicu, IA (I) C1 (37) 3
Capitolul I
INTRODUCERE
M. Voicu, IA (I) C1 (37) 4
1. Automatizarea: conţinut, categorii şi scopuri
automatautomat adjectivadjectiv sau substantivsubstantiv
• AutomatAutomat – calitatea unui sistem fizico-tehnic de a efectua,pe baza unei comenzi, o operaţie sau un complex deoperaţii fără participarea directă a operatorului uman.
• Un automatUn automat – un dispozitiv, un aparat sau o instalaţie îngeneral un sistem - care operează sau funcţionează în
mod automat.
M. Voicu, IA (I) C1 (37) 5
• AutomatizareAutomatizare:acţiunea de concepere, de realizare deautomate şi de echipare a sistemelor fizico-tehnicecu automate pentru efectuarea unor operaţii, mişcări,acţiuni etc., fără participarea directă a omului.
• Categorii de automatizări:• de comandă,• de măsurare,• de reglare,• de protecţie, şi• de semnalizare.
Toate acestea pot fi locale sau la distanţă (teleautomatizări).
M. Voicu, IA (I) C1 (37) 6
• Scopurile generale ale automatizării:• productivitatea• consumurile specifice• precizia execuţiei• siguranţa în funcţionare• protecţia instalaţiilor• evitarea de către om a efortului fizic şi a mediilor nocive.
• Crearea instalaţiilor tehnologice şi a tehnologiiloreste un atribut al inginerieiingineriei.
IngineriaIngineria:cunoaşterea şi utilizarea materialelor şi forţelor
naturii pentru beneficiul umanităţii, folosind maşini,instalaţii şi construcţii concepute, realizate şiutilizate în cadrul unor organizaţii socio-economice.
M. Voicu, IA (I) C1 (37) 7
Inginerul automatistInginerul automatist ,cunoscând structura si proprietatile unui sistem,concepe şi realizează automatizarea acestuia.
Profesie inter- şi multidisciplinară: cunoştinţe de matematică, fizică, chimie, biologie,
electrotehnică, electronică, tehnică de calcul,informatică şi de automaticăautomatică,adecvat operante în conceperea,realizarea şi utilizarea automatizărilor;
cultură ştiinţifică şi tehnică dublată de viziune sistemică; soluţii de automatizare pentru diverse sisteme:
mecanice, electrice, termice, fluidice,chimice, biologice sau combinaţii ale acestora.
M. Voicu, IA (I) C1 (37) 8
2. De la mecanizare la automatizareDezvoltarea istorică a producţiei:
• revolurevoluţţia industrialăia industrială (sec. XVIII);utilizarea maşinilor acţionate de maşina cu vapori;
• revolurevoluţţiaia şştiintiinţţificoifico -- tehnică contemporană tehnică contemporană;automatizarea şi informatizarea globală a societăţii.
Trepte de dezvoltare: manufacturare mecanizare automatizareautomatizare –– cibernetizarecibernetizare;
prelucrarea computaţională complexă a informaţiei.
M. Voicu, IA (I) C1 (37) 9
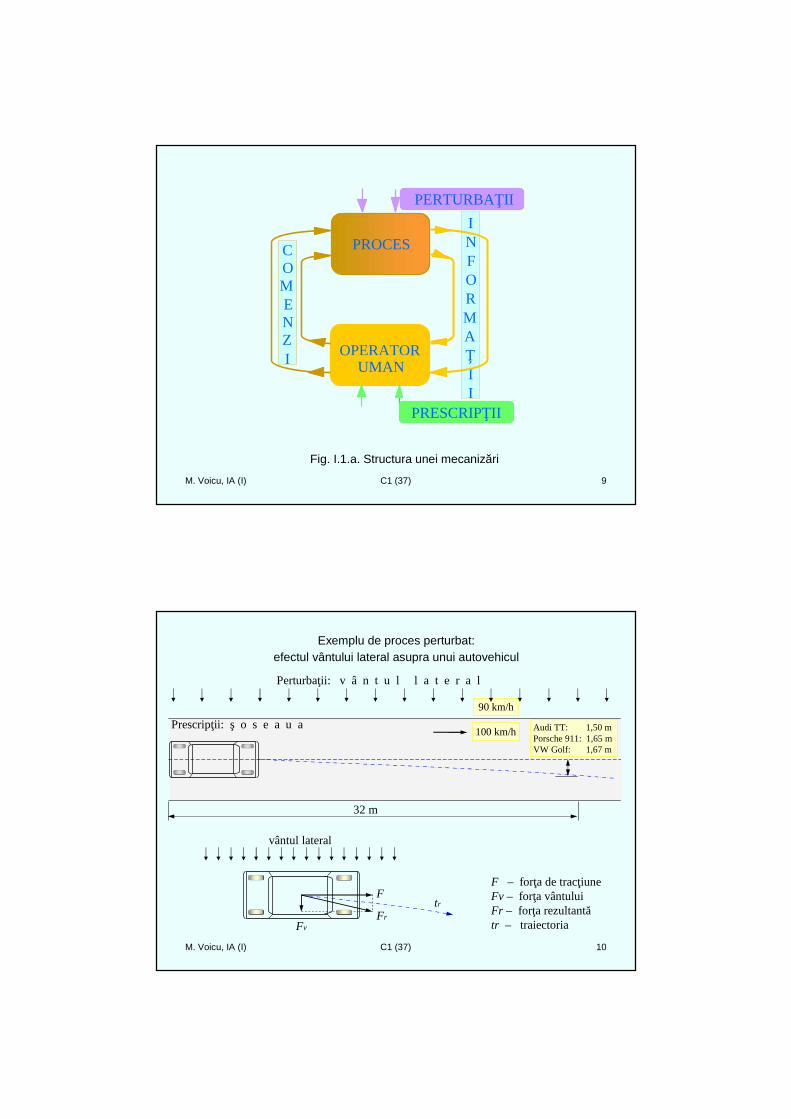
OPERATORUMAN
Fig. I.1.a. Structura unei mecanizări
PRESCRIPŢII
PERTURBAŢII
COMENZI
INFORMAŢII
PROCES
M. Voicu, IA (I) C1 (37) 10
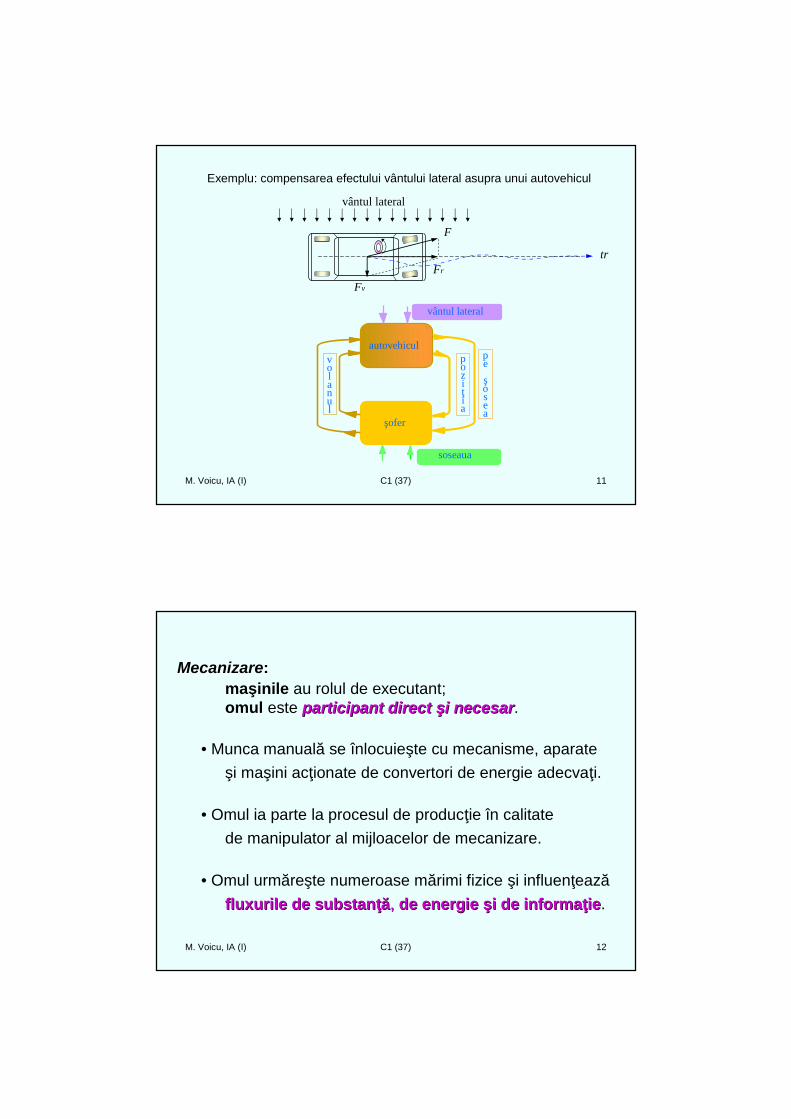
F
FvFr
vântul lateral
32 m
100 km/h Audi TT: 1,50 mPorsche 911: 1,65 mVW Golf: 1,67 m
F – forţa de tracţiuneFv – forţa vântuluiFr – forţa rezultantătr – traiectoria
90 km/h
Prescripţii: ş o s e a u a
Perturbaţii: v â n t u l l a t e r a l
tr
Exemplu de proces perturbat:efectul vântului lateral asupra unui autovehicul
M. Voicu, IA (I) C1 (37) 11
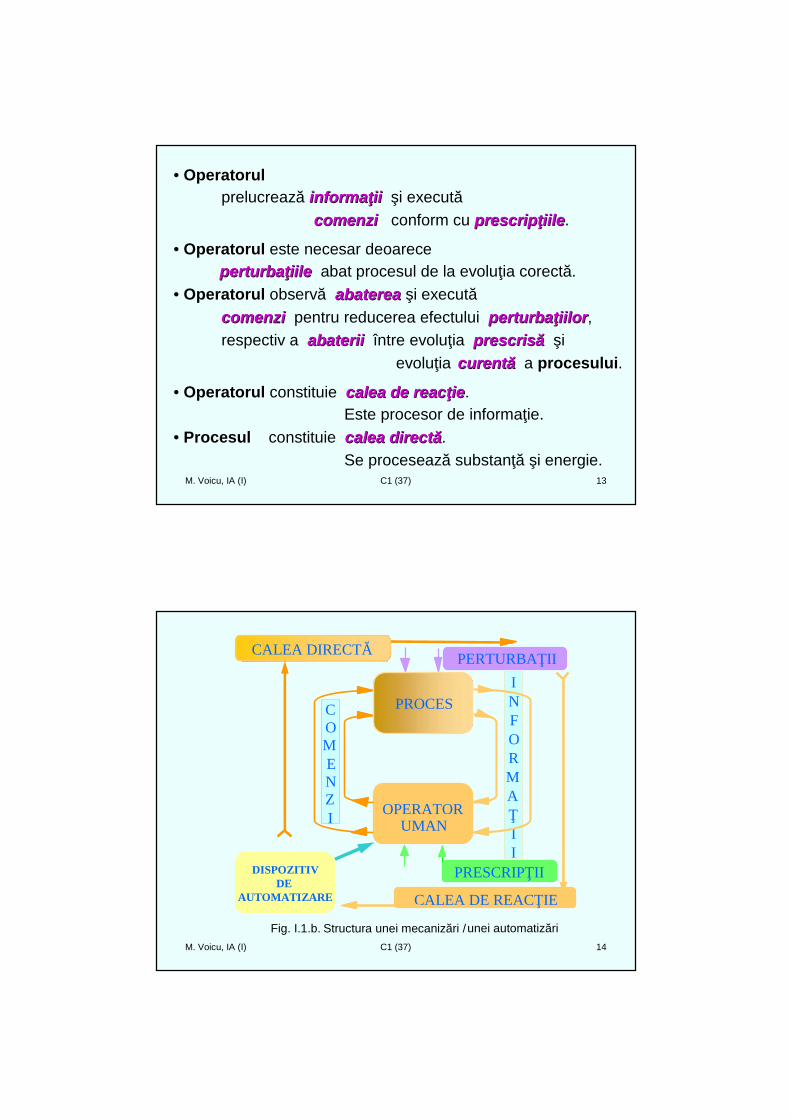
Exemplu: compensarea efectului vântului lateral asupra unui autovehicul
F
Fv
Fr
vântul lateral
şofer
soseaua
vântul lateral
volanul
poziţia
autovehiculpe
şosea
tr
M. Voicu, IA (I) C1 (37) 12
MecanizareMecanizare:maşinile au rolul de executant;omul este participant directparticipant direct şşi necesari necesar.
• Munca manuală se înlocuieşte cu mecanisme, aparateşi maşini acţionate de convertori de energie adecvaţi.
• Omul ia parte la procesul de producţie în calitatede manipulator al mijloacelor de mecanizare.
• Omul urmăreşte numeroase mărimi fizice şi influenţeazăfluxurile de substanfluxurile de substanţţăă,, de energiede energie şşi de informai de informaţţieie.
M. Voicu, IA (I) C1 (37) 13
• OperatorulOperatorul constituie calea de reaccalea de reacţţieie.Este procesor de informaţie.
• PProcesulrocesul constituie calea directăcalea directă.Se procesează substanţă şi energie.
• OperatorulOperatorulprelucrează informainformaţţiiii şi execută
comenzicomenzi conform cu prescripprescripţţiileiile.
• OOperatorulperatorul este necesar deoareceperturbaperturbaţţiileiile abat procesul de la evoluţia corectă.
• OOperatorulperatorul observă abatereaabaterea şi executăcomenzicomenzi pentru reducerea efectului perturbaperturbaţţiiloriilor,respectiv a abateriiabaterii între evoluţia prescrisăprescrisă şi
evoluţia curentăcurentă a procesuluiprocesului.
M. Voicu, IA (I) C1 (37) 14
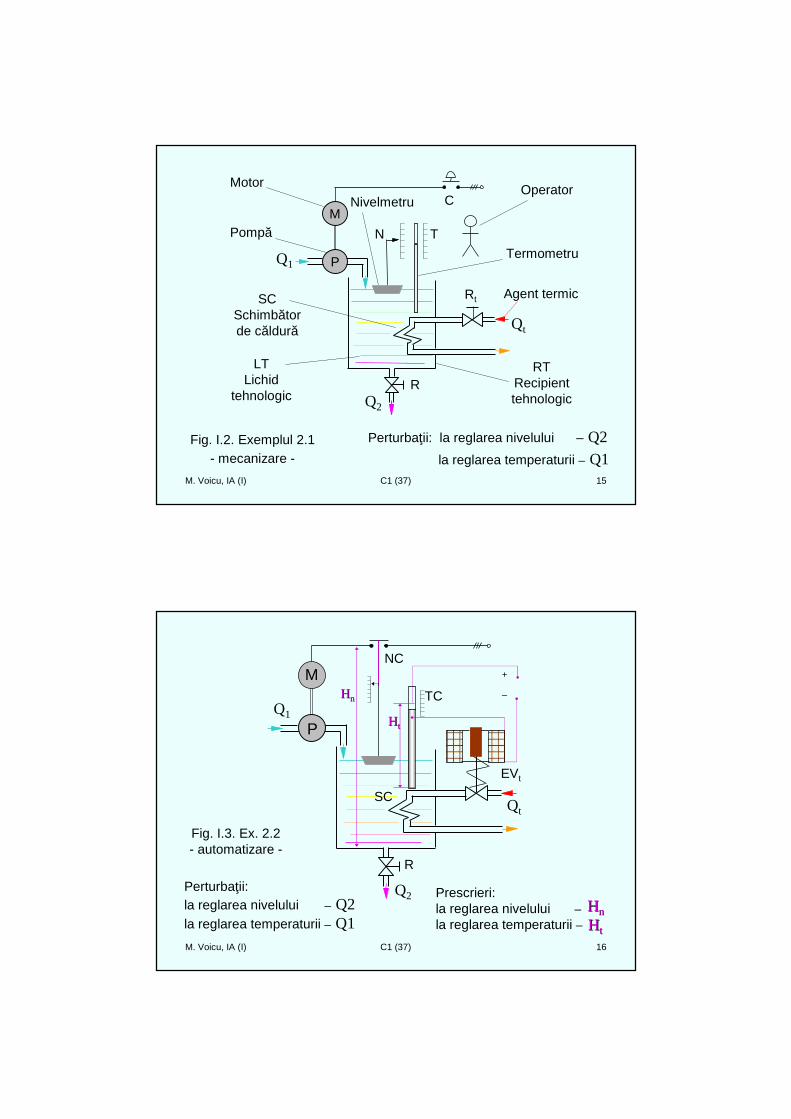
OPERATORUMAN
PRESCRIPŢII
PERTURBAŢII
COMENZI
INFORMAŢII
PROCES
Structura
CALEA DE REACŢIE
CALEA DIRECTĂ
DEAUTOMATIZARE
DISPOZITIV
unei automatizăriunei mecanizări /Fig. I.1.b.
M. Voicu, IA (I) C1 (37) 15
Q1
LTLichid
tehnologicR
Rt
Qt
N T
Q2
PompăTermometru
Agent termic
RTRecipienttehnologic
NivelmetruMotor
M
P
C
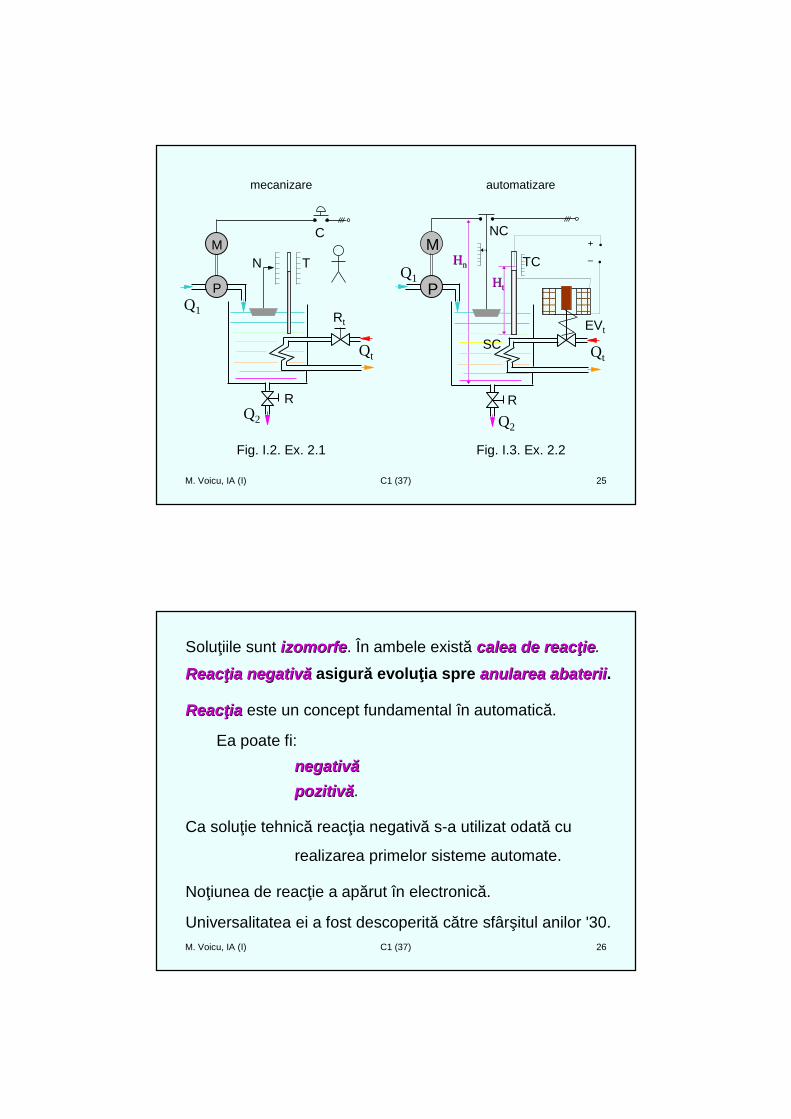
Fig. I.2. Exemplul 2.1- mecanizare -
Perturbaţii: la reglarea nivelului – Q2la reglarea temperaturii – Q1
SCSchimbătorde căldură
Operator
M. Voicu, IA (I) C1 (37) 16
M
Q1
R
Qt
Q2
SC
P
EVt
NC
TC
+
–
Perturbaţii:la reglarea nivelului – Q2la reglarea temperaturii – Q1
Prescrieri:la reglarea nivelului –la reglarea temperaturii –
HHnn
HHtt
Fig. I.3. Ex. 2.2- automatizare -
HHnn
HHtt
M. Voicu, IA (I) C1 (37) 17
NCC
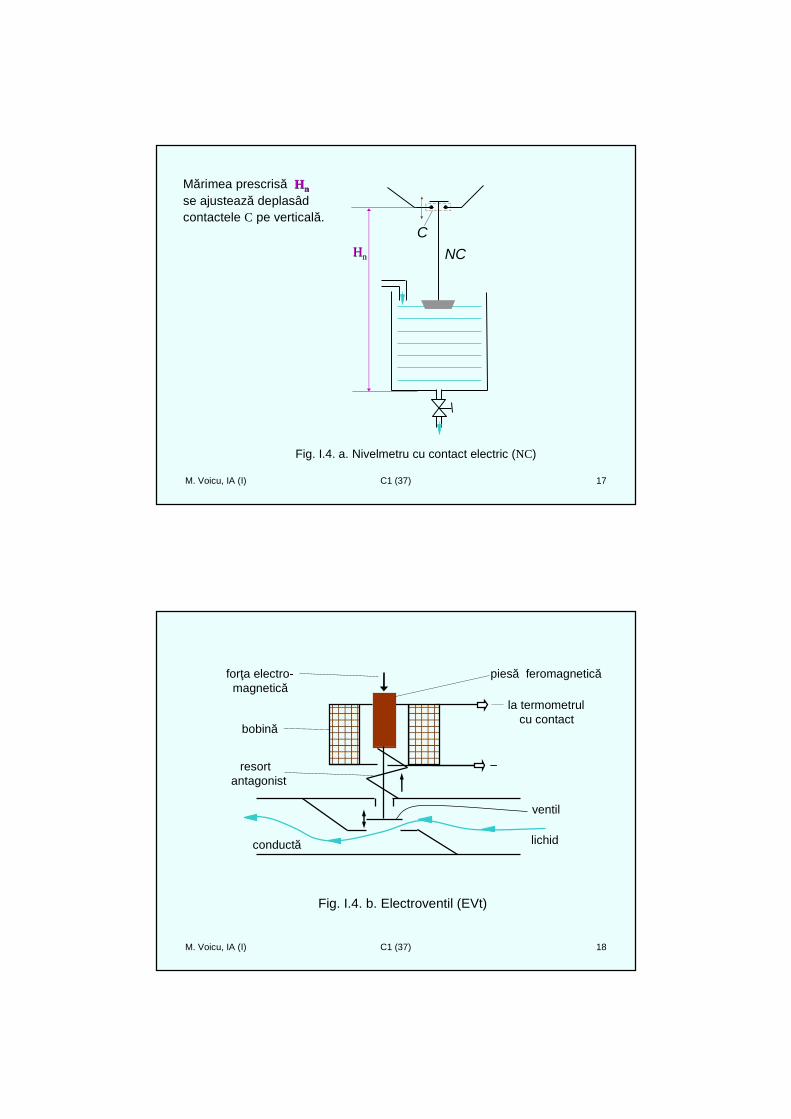
Fig. I.4. a. Nivelmetru cu contact electric (NC)
Mărimea prescrisă HHnn
se ajustează deplasâdcontactele C pe verticală.
HHnn
M. Voicu, IA (I) C1 (37) 18
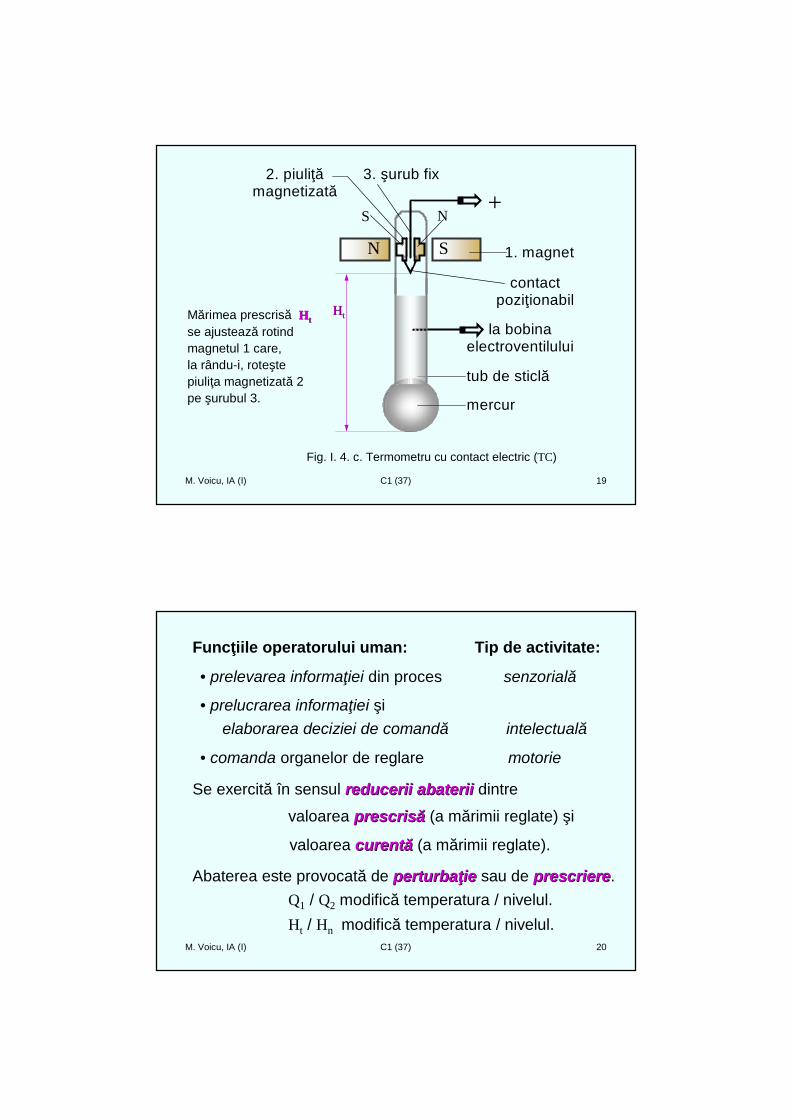
Fig. I.4. b. Electroventil (EVt)
–
lichid
ventil
resortantagonist
la termometrulcu contact
piesă feromagnetică
conductă
bobină
forţa electro-magnetică
M. Voicu, IA (I) C1 (37) 19
N S
NS
1. magnet
tub de sticlă
+
la bobinaelectroventilului
2. piuliţămagnetizată
3. şurub fix
contactpoziţionabil
mercur
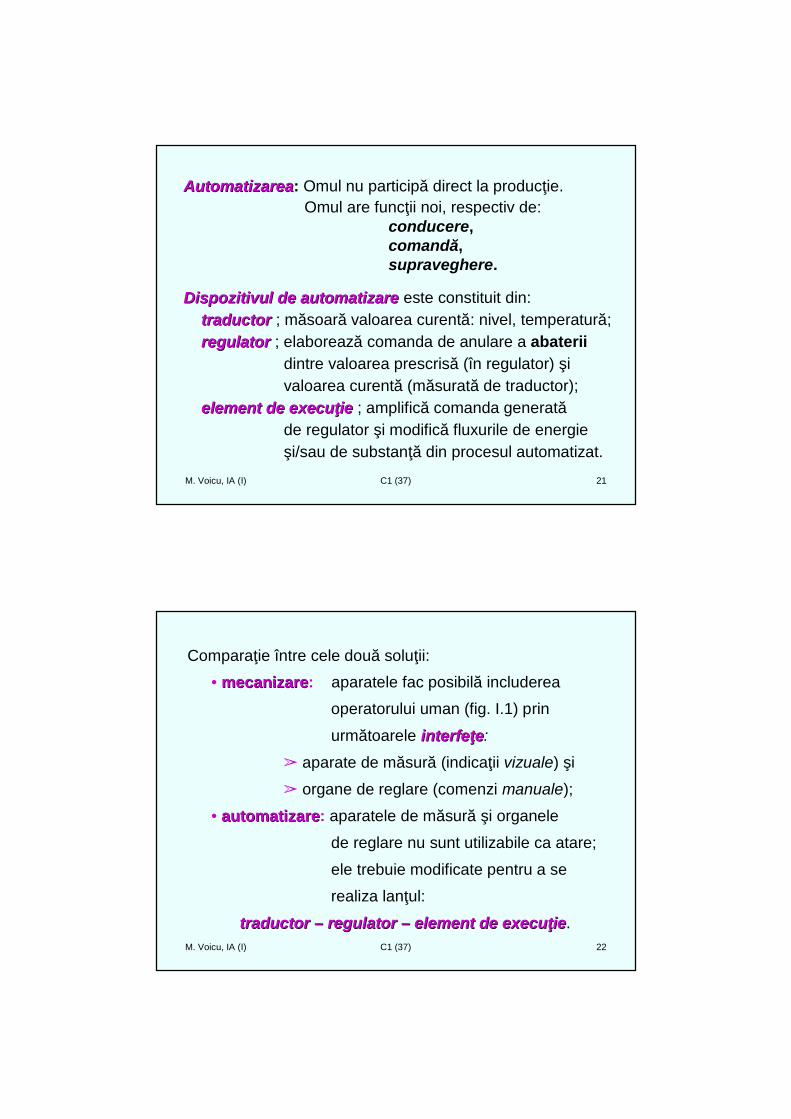
Fig. I. 4. c. Termometru cu contact electric (TC)
HHttMărimea prescrisă HHtt
se ajustează rotindmagnetul 1 care,la rându-i, roteştepiuliţa magnetizată 2pe şurubul 3.
M. Voicu, IA (I) C1 (37) 20
Se exercită în sensul reducerii abateriireducerii abaterii dintre
valoarea prescrisăprescrisă (a mărimii reglate) şi
valoarea curentăcurentă (a mărimii reglate).
Funcţiile operatorului uman: Tip de activitate:
• prelevarea informaţiei din proces senzorială
• prelucrarea informaţiei şielaborarea deciziei de comandă intelectuală
• comanda organelor de reglare motorie
Abaterea este provocată de perturbaperturbaţţieie sau de prescriereprescriere.Q1 / Q2 modifică temperatura / nivelul.Ht / Hn modifică temperatura / nivelul.
M. Voicu, IA (I) C1 (37) 21
AutomatizareaAutomatizarea: Omul nu participă direct la producţie.Omul are funcţii noi, respectiv de:
conducere,comandă,supraveghere.
Dispozitivul de automatizareDispozitivul de automatizare este constituit din:traductortraductor ; măsoară valoarea curentă: nivel, temperatură;regulatorregulator ; elaborează comanda de anulare a abaterii
dintre valoarea prescrisă (în regulator) şivaloarea curentă (măsurată de traductor);
element de execuelement de execuţţieie ; amplifică comanda generatăde regulator şi modifică fluxurile de energieşi/sau de substanţă din procesul automatizat.
M. Voicu, IA (I) C1 (37) 22
Comparaţie între cele două soluţii:• mecanizaremecanizare: aparatele fac posibilă includerea
operatorului uman (fig. I.1) prin
următoarele interfeinterfeţţee:
aparate de măsură (indicaţii vizuale) şi
organe de reglare (comenzi manuale);
• automatizareautomatizare: aparatele de măsură şi organele
de reglare nu sunt utilizabile ca atare;
ele trebuie modificate pentru a se
realiza lanţul:
traductortraductor –– regulatorregulator –– element de execuelement de execuţţieie.
M. Voicu, IA (I) C1 (37) 23
Ingineria automatizăriiIngineria automatizării: crearea de traductoare, regulatoare şielemente de execuţie; crearea automatizărilor.
Tehnica automatizăriiTehnica automatizării :tehnica măsurăriitehnica măsurării: prelevarea, compararea, convertirea,
amplificarea, indicarea şi înregistrareamărimilor fizice;
tehnica reglăriitehnica reglării: elaborarea comenzilor care asigurămodificarea fluxurilor de substanţă,energie şi informaţie;
tehnica telematiciitehnica telematicii: transmiterea la distanţă a informaţiilorîntre om şi maşină sau între maşini;
tehnica detehnica de calcucalcull: codificarea, prelucrarea, stocarea,decodificarea şi distribuţia informaţiilor.
M. Voicu, IA (I) C1 (37) 24
3. Ce este un sistem automat?La ex. 2.1 şi 2.2 temperatura variază deoarece există un
consum (Q2) şi un adaus (Q1).Prin variaţia adecvată a lui Qt, abatereaabaterea dintre
valoareavaloarea prescrisăprescrisă şi valoareavaloarea curentăcurentăale temperaturii se poate reduce până la anulare.
Reducerea abateriiReducerea abaterii este posibilă prin:1 Un operator prelucrează informaţii din proces
şi acţionează prin organul de reglare Rtîn sensul anulării abateriianulării abaterii.
2 Un dispozitiv de automatizare prelucrează informaţiidin proces şi acţionează prin organul de reglare Rtîn sensul anulării abateriianulării abaterii.
M. Voicu, IA (I) C1 (37) 25
Q1
R
Rt
Qt
N T
Q2
M
P
C
Fig. I.2. Ex. 2.1 Fig. I.3. Ex. 2.2
mecanizare automatizare
EVt
NC
TC+
–HHnn
HHtt
M
Q1
R
Qt
Q2
SC
P
M. Voicu, IA (I) C1 (37) 26
Soluţiile sunt izomorfeizomorfe. În ambele există calea decalea de reacreacţţieie.
ReacReacţţia negativăia negativă asigură evoluţia spre anulanulaarreaea abateriiabaterii..
ReacReacţţiaia este un concept fundamental în automatică.
Ea poate fi:negativănegativăpozitivăpozitivă..
Ca soluţie tehnică reacţia negativă s-a utilizat odată cu
realizarea primelor sisteme automate.
Noţiunea de reacţie a apărut în electronică.
Universalitatea ei a fost descoperită către sfârşitul anilor '30.
M. Voicu, IA (I) C1 (37) 27
nerv optic
creier
globulocular muşchi de
deschidere
info
rmaţ
ievi
zual
ă
retina
com
enzi
CA
LEA
DE
RE
AC
ŢIE C
ALE
A D
IRE
CTĂ
pupilamuşchi deînchidere
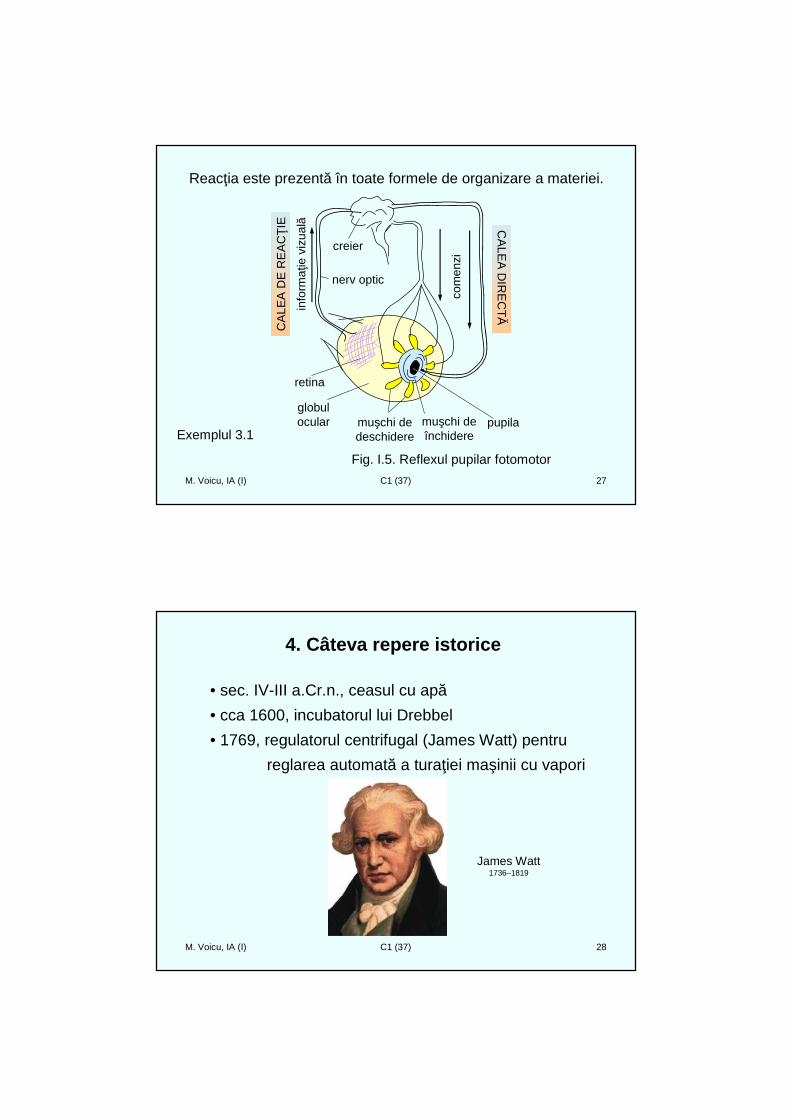
Reacţia este prezentă în toate formele de organizare a materiei.
Exemplul 3.1
Fig. I.5. Reflexul pupilar fotomotor
M. Voicu, IA (I) C1 (37) 28
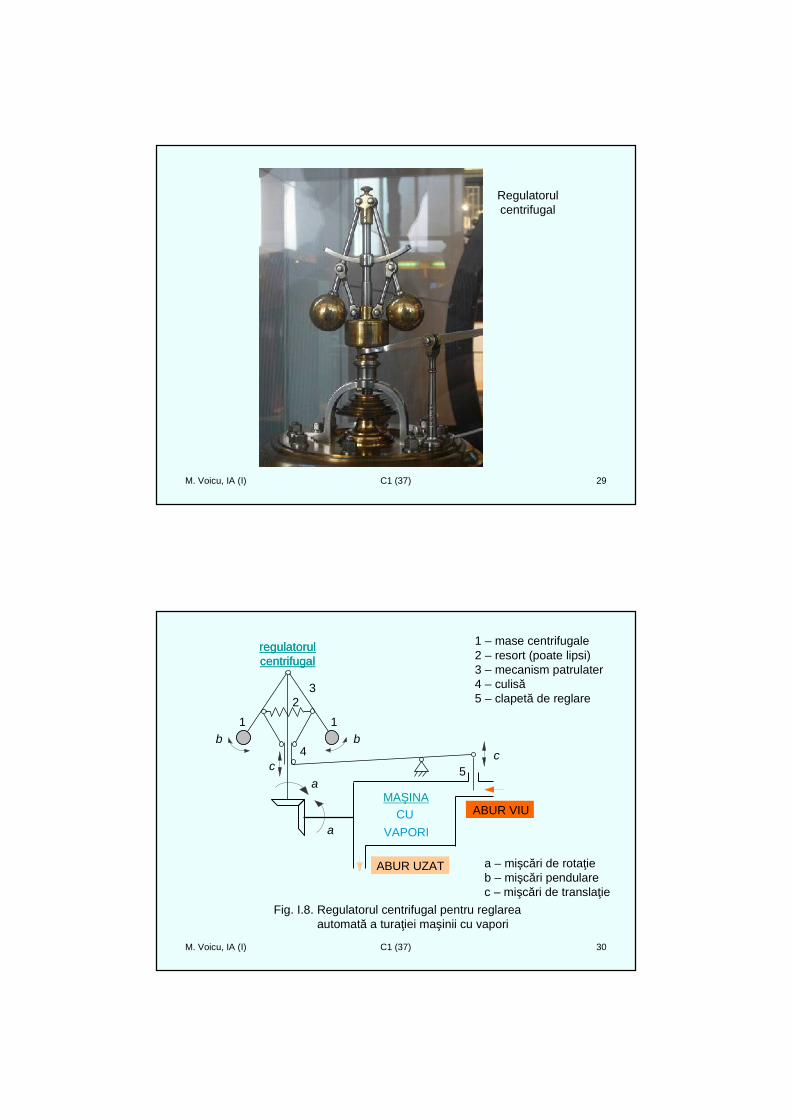
• sec. IV-III a.Cr.n., ceasul cu apă• cca 1600, incubatorul lui Drebbel• 1769, regulatorul centrifugal (James Watt) pentru
reglarea automată a turaţiei maşinii cu vapori
4. Câteva repere istorice
James Watt1736–1819
M. Voicu, IA (I) C1 (37) 29
Regulatorulcentrifugal
M. Voicu, IA (I) C1 (37) 30
a
MAŞINACU
VAPORI
ABUR UZAT
ABUR VIU
c5
32
c
11b b
1 – mase centrifugale2 – resort (poate lipsi)3 – mecanism patrulater4 – culisă5 – clapetă de reglare
4
a – mişcări de rotaţieb – mişcări pendularec – mişcări de translaţie
a
Fig. I.8. Regulatorul centrifugal pentru reglareaautomată a turaţiei maşinii cu vapori
regulatorulcentrifugalregulatorulcentrifugal
M. Voicu, IA (I) C1 (37) 31
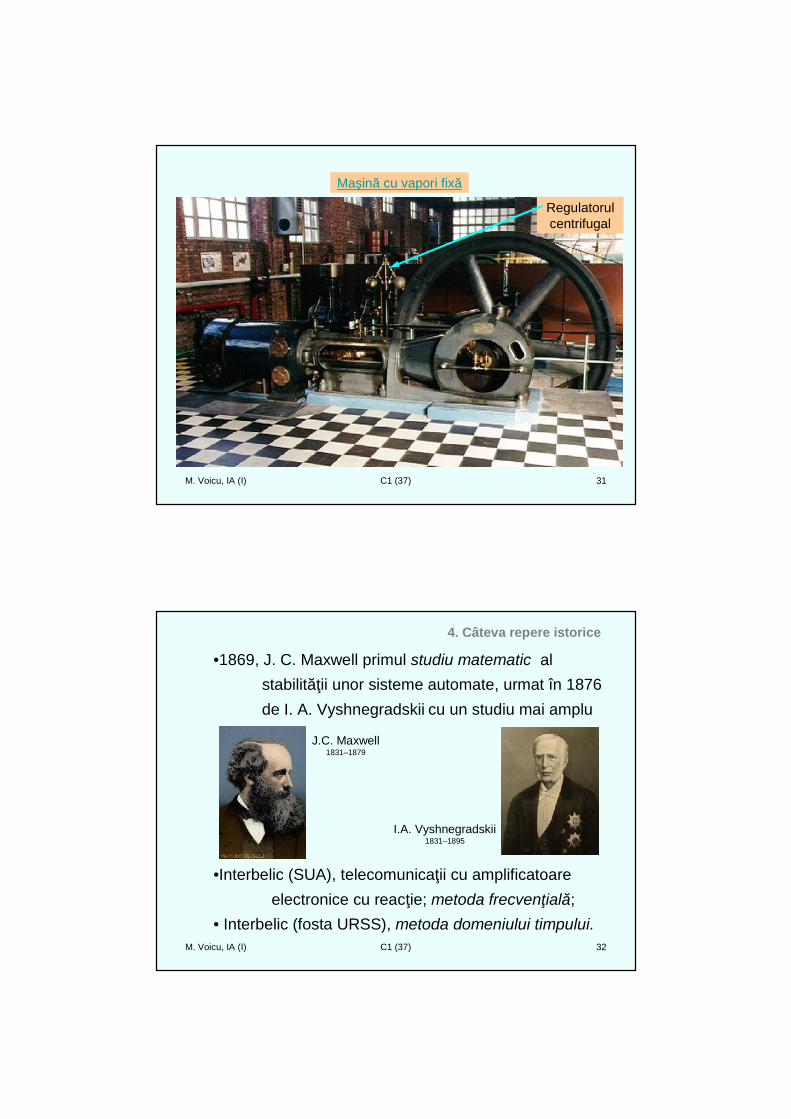
Maşină cu vapori fixă
Regulatorulcentrifugal
M. Voicu, IA (I) C1 (37) 32
•1869, J. C. Maxwell primul studiu matematic alstabilităţii unor sisteme automate, urmat în 1876de I. A. Vyshnegradskii cu un studiu mai amplu
4. Câteva repere istorice
•Interbelic (SUA), telecomunicaţii cu amplificatoareelectronice cu reacţie; metoda frecvenţială;
• Interbelic (fosta URSS), metoda domeniului timpului.
J.C. Maxwell1831–1879
I.A. Vyshnegradskii1831–1895
M. Voicu, IA (I) C1 (37) 33
5. Automatica şi cibernetica;sisteme şi semnale
AutomaticaAutomatica = cercetarea teoretică a sistemelorautomate şi studiul, conceperea şi
realizarea mijloacelor tehnice
de automatizare.
CiberneticaCibernetica = "studiul analitic al izomorfismului întrestructura comunicaţiilor în mecanisme,
în organisme şi în societăţi".
M. Voicu, IA (I) C1 (37) 34
Se au în vedere trei aspecte privitoare la comunicaţii:1 Aparatele, operatorul sau dispozitivul de automatizare
şi recipientul tehnologic formează un sistemsistem.Sistemul are o structurăstructură.
2 ElElementeleementele sistemuluisistemului sunt conectate prin semnalesemnale.Se transmit de la cauzăcauză (mărime de intrare)
la efectefect (mărime de ieşire).
3 Acţiunea comună a părţilor realizează scopul:anularea abateriianularea abaterii şi respectivccompensareaompensarea efectului perturbaefectului perturbaţţiiloriilor.Această proprietate nu este a elementelor sistemului.Este un rezultat al structuriistructurii şi al comunicacomunicaţţiiloriilor.
M. Voicu, IA (I) C1 (37) 35
SSistemistem = o unitate relativ delimitată faţă de mediu prinstructura sa internă. Noţiunea este relativă.
Una şi aceeaşi realitate poate conţine mai multe sisteme.
Între sisteme se transmit informaţii. Noţiunea de informainformaţţieierezultă prin abstractizarea semnificaţiilor uzuale.
O informaţie nu este cunoscută aprioric.
Realizarea unei informaţii concrete înlătură o incertitudineincertitudine.Această incertitudine este cuantificabilă – are o valoarevaloare.
O mărime fizico-tehnică purtătoare de informaţie = semnalsemnal.PParametruarametru informainformaţţionalional = param. dependent de informaţie.
M. Voicu, IA (I) C1 (37) 36
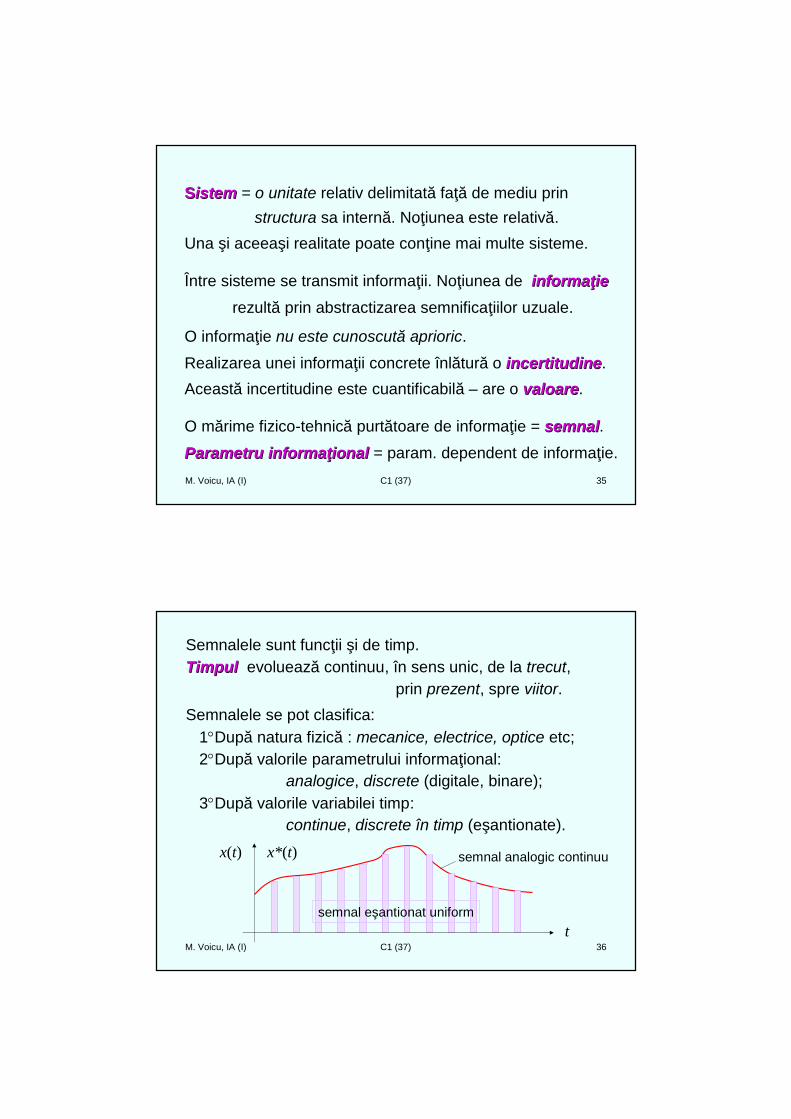
Semnalele sunt funcţii şi de timp.TimpulTimpul evoluează continuu, în sens unic, de la trecut,
prin prezent, spre viitor.Semnalele se pot clasifica:
1După natura fizică : mecanice, electrice, optice etc;2După valorile parametrului informaţional:
analogice, discrete (digitale, binare);3După valorile variabilei timp:
continue, discrete în timp (eşantionate).
t
x(t) semnal analogic continuu
semnal eşantionat uniform
x*(t)

M. Voicu, IA (I) C1 (37) 37
4După previzibilitatea evoluţiei viitoare:deterministe, stohastice (aleatoare).
SistemeleSistemele procesează semnalesemnale.Noţiunile de sistemsistem şi semnalsemnal sunt duale.
În lipsa semnalelorsemnalelor // sistemelorsistemelorexistenţa sistemelorsistemelor // semnalelorsemnalelor este insesizabilă.
Clasificarea sistemelor după natura semnalelor procesate:sisteme analogice sau discrete,sisteme continue sau discrete în timp (cu eşantionare),sisteme deterministe sau stohastice (aleatoare).