ingineria si calculul robotilor ali - maini v5
TRANSCRIPT
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 1/67
Ingineria si
CalcululRobotilo
rIndustri
ali
2008Virgil ISPASMihaiSTEOPAN
Mainile RobotizateSi Efectori Finali

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 2/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Pag. 2
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 3/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
CUPRINS:
INTRODUCERE ............................................................................................... 4CLASIFICAREA EFECTORILOR FINALI ............................................................... 5SISTEMUL DE ACŢIONARE PENTRU EFECTORI finali.......................................... 8MÂINI MECANICE ........................................................................................ 12
4.1. Mâini mecanice cu două degete ........................................................... 13
4.1.1. Mecanismele de rotaţie şi prindere ..................................................................13
4.1.2 Mâna cu mecanism de translaţie ......................................................................15
4.1.3. Mana cu simpla actiune ...................................................................................19
4.1.4. Consideratii privind constructia degetului .......................................................20
4.1.5. Calcularea fortei maxime sau a momentului maxim de prindere .....................26
4.2. Maini mecanice cu trei sau cinci degete ............................................... 27
4.2.1. Mana cu trei degete .........................................................................................27
4.2.2. Mana cu cinci degete .......................................................................................28
4.2.3. Maini mecanice pentru aplicatii de precizie .....................................................29
5 SCULE SPECIALE ...................................................................................... 325.1 Atasarea dispozitivelor ........................................................................ 32
5.2 Dispozitivele de sustinere si oprire ....................................................... 32
5.3 Dispozitivele pneumatice de ridicare .................................................... 32
5.4 Dispozitive de ridicare magnetice ........................................................ 36
6 Maini universale ...................................................................................... 406.1. Proiectarea mainilor universale ........................................................... 40
6.2. Controlul mainilor universale .............................................................. 46
7. IMPLEMENTAREA PRACTICA A EFECTORILOR FINALI LA ROBOTI .................. 487.1. Montajul plat ...................................................................................... 48
7.2 Implementarea puterii......................................................................... 52
7.3 Legaturile mecanice ............................................................................ 53
7.4. Senzori.............................................................................................. 54
8. PROIECTUL PRACTIC PENTRU EFECTORII FINALI AL ROBOTULUI................. 568.1. Criteriul general de proiectare a efectorului final................................. 56
8.2. Preingineria si colectia de date ........................................................... 59
8.2.1 Analiza pieselor de lucru .............................................................................59
8.2.2. Analiza proceselor ............................................................................................61
8.3. Proiectul ghidajelor efectorului final.................................................... 63
9 SUMAR .................................................................................................... 65CONFIRMARE .............................................................................................. 66REFERINTE ................................................................................................. 66
STUDIU SUPLIMENTAR ................................................................................. 67
Pag. 3

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 4/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
INTRODUCERE
Mâna robotului este scula ce face ca robotul să interacţioneze cumediul, sa execute miscari aemeni unei maini umane. Obiectivul este de aexecuta activitatea necesară prin intermediul interacţiunii cu mediul.
Deoarece poate fii considerată un mijloc de creare a unui efect înmediul înconjurator şi este localizată de obicei la capătul unui braţ robotic,mai este numit adesea efector-final. Una din cele mai bune moduri derealizare a unui robot cu un grad ridicat de dexteritare consta indezvoltarea end-efectorul-ui ca o mana, asemeni mâinii umane, care arecinci degete ce pot muta cu îndemanare şi să relizeze lucruri complexe şivariate. Oricum, asemănător unei mâini e nevoie de mecanisme complexeşi algoritmi de control, justificând cresterea dificultăţilor şi creştereacosturilor. În aplicaţiile industriale roboţii sunt de multe ori necesaripentru a manevra doar profiluri limitate ale obiectelor, ori părţi limitateale obiectelor. Pentru aceste cerinţe mâna umană nu este economică.
Tipuri variate de mâini speciale cu funcţii de apucare simple, ori sarcinaorientarii sculei utilizate sunt des folosite. Un dispozitiv pentru manevratdoar profiluri limitate ale obiectelor este uneori numit graifar, ori dispozitivde prindere.
În unele aplicaţii simplificarea funcţiei graifarului este maiimportanta decât limitarea (restrângerea) versatilităţii şi dexterităţii
dispozitivelor asemănătoare. În alte aplicaţii pentru manevrabilitatea şimanipularea multor obiecte de greutati, profile, şi materiale variate estenecesar şi un tip de efector-final ce are funcţii complexe. Acest gen deefector-final este numit mână universală. Cercetarea vastă in domeniu aprodus în afara designului şi manipulării mâinilor universale, câtevaversiuni practice.
Acest capitol descrie diferite tipuri de efectori-finali în uz practic,discuţii recente despre dezvoltare în privinţa mâinilor universale şialgoritmii lor de control. Capitolul explică de asemenea implementareapractică şi condiţiile de design ale efectorilor-finali.
Pag. 4
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 5/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
CLASIFICAREA EFECTORILOR FINALI
End–efectorii au constructii variate, depinzând de locul în care eisunt folositi pentru a interacţiona cu mediul, pentru realizarea operaţiuniinecesare. Prezentele evolutii in domeniu sunt de crestere a numărului demecanisme utilizate pentru proiectarea efectorilor–finali şi funcţiile
înscrise pe el. De asemenea efectorii-finali pot fii proiectaţi utilizânddiferite tipuri de actuatori dacă este necesar controlul activ. Acestacauzează multe schimbări ce urmează a fi dezvoltate. Această secţiunediscută despre clasificările efectorilor-finali pe baza unor funcţiile stabilite.
In general efectorii-finali pot fi clasificati după funcţie dupa cum
urmeaza:1. Mâna mecanică
2. Scula specială
3. Mâna universală
Sarcinile cele mai comune pentru efectorii finali au la baza funcţii deprindere. Unealta de prindere, mâna, este astfel cea mai des utilizată.Clasa 1 face referire la mâini cu degete ale carui profil nu poate ficontrolat în mod activ. Asemenea degetelor mâinii sunt în generaldesmembrate şi au fixate profile special proiectate pentru obiectul de
manevrat.
Pag. 5
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 6/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
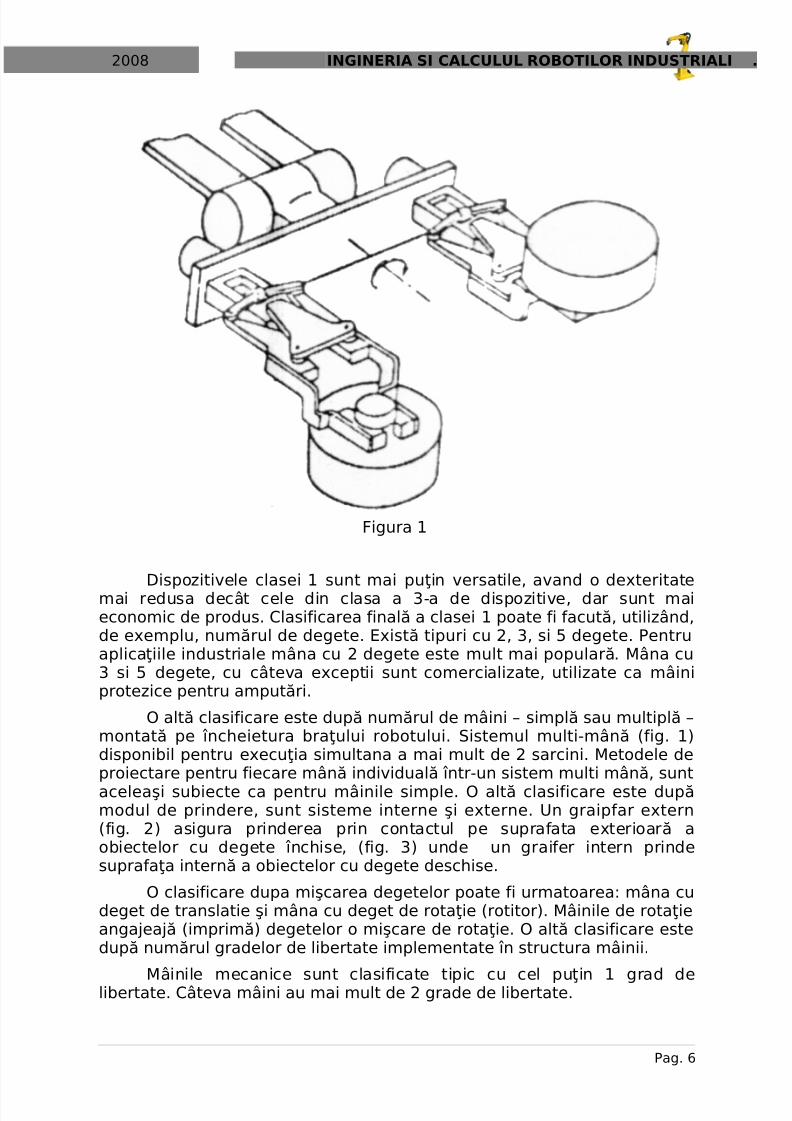
Figura 1
Dispozitivele clasei 1 sunt mai puţin versatile, avand o dexteritatemai redusa decât cele din clasa a 3-a de dispozitive, dar sunt maieconomic de produs. Clasificarea finală a clasei 1 poate fi facută, utilizând,de exemplu, numărul de degete. Există tipuri cu 2, 3, si 5 degete. Pentruaplicaţiile industriale mâna cu 2 degete este mult mai populară. Mâna cu3 si 5 degete, cu câteva exceptii sunt comercializate, utilizate ca mâiniprotezice pentru amputări.
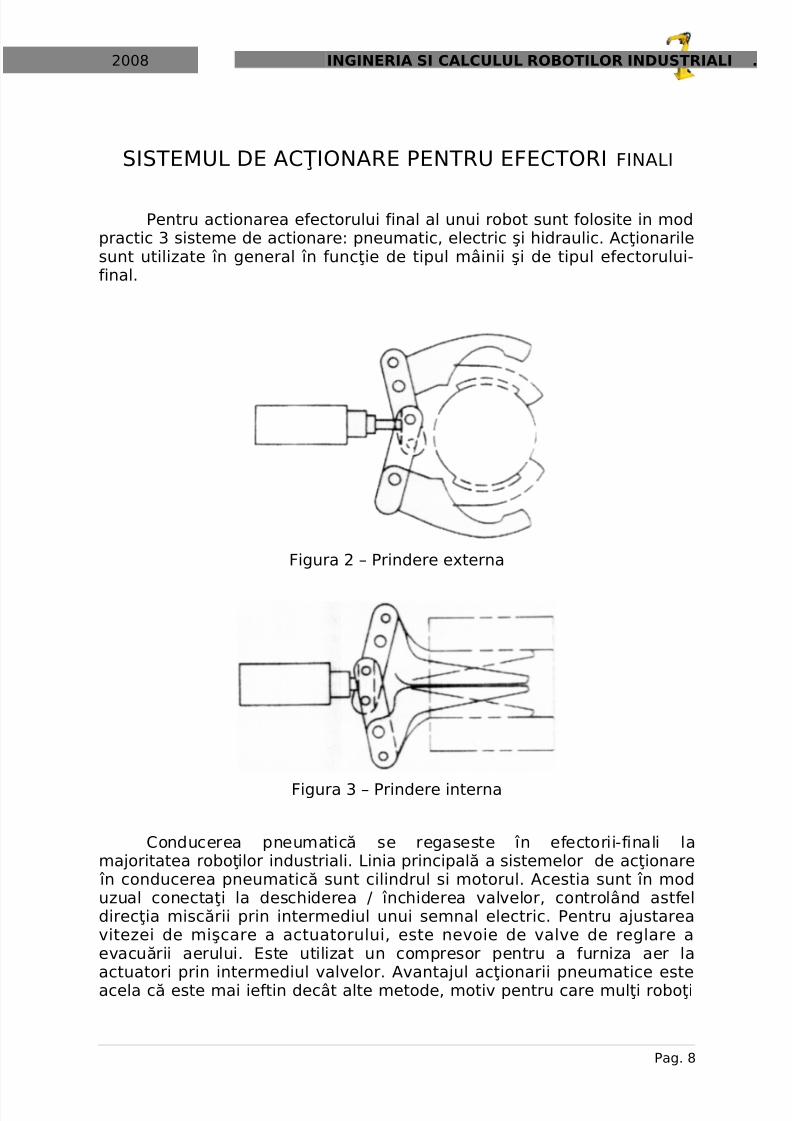
O altă clasificare este după numărul de mâini – simplă sau multiplă –montată pe încheietura braţului robotului. Sistemul multi-mână (fig. 1)disponibil pentru execuţia simultana a mai mult de 2 sarcini. Metodele deproiectare pentru fiecare mână individuală într-un sistem multi mână, suntaceleaşi subiecte ca pentru mâinile simple. O altă clasificare este dupămodul de prindere, sunt sisteme interne şi externe. Un graipfar extern(fig. 2) asigura prinderea prin contactul pe suprafata exterioară aobiectelor cu degete închise, (fig. 3) unde un graifer intern prindesuprafaţa internă a obiectelor cu degete deschise.
O clasificare dupa mişcarea degetelor poate fi urmatoarea: mâna cudeget de translatie şi mâna cu deget de rotaţie (rotitor). Mâinile de rotaţieangajeajă (imprimă) degetelor o mişcare de rotaţie. O altă clasificare estedupă numărul gradelor de libertate implementate în structura mâinii.
Mâinile mecanice sunt clasificate tipic cu cel puţin 1 grad delibertate. Câteva mâini au mai mult de 2 grade de libertate.
Pag. 6
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 7/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Clasa a 2-a se refera la dispozitivele speciale pentru aplicaţiispecifice. Ventuzele cu vacum şi electromagneţi sunt tipice dispozitiveloracestei clase. În unele aplicaţii obiectele ce trebuie manevrate pot fi preamari ori slabe pentru a putea fi apucate cu mâna. În unele cazuri o sculapotrivita pentru manevrarea obiectului are un avantaj faţa de alte
dispozitive. De asemenea în unele aplicaţii este mult mai eficient a instalao scula specifică potrivită şi necesară aplicaţiei.
Aceste tipuri de efectori finali sunt utilizati peste tot în industriaroboţilor, cu precadere pentru asigurarea pozitionarii punctelor de sudurapentru operatii de sudura în puncte, puterii perforărilor pentru operatii degaurire, viteze si avansuri pentru spray-urile cu vopsea, a pozitionarii sifortei necesare operatiilor de asamblare.
Clasa a3-a este compusă de mâini multifuncţionale uzuale cu maimult de 3 degete şi cu mai mult de o îmbinare pentru fiecare deget,capabile de a executa o largă varietate de prinderi şi sarcini demanipulare. Pentru descrierea si proiectarea acestui tip de mână, unnumar mare de probleme trebuie rezolvate în ceea ce priveste proiectareamecanismelor de comanda şi controlul. O gama larga de proiectemecanice si mecatronice au fost propuse pentru clasa de mâiniuniversale, câteva dintre acestea fiind în prezent comercializate.Dezavantajul acestei clase de efectori finali consta in necesitatea unuicontrol sever şi eficient al algoritmilor pentru prinderea ferma şimanipulare, si gasirea unor aplicatii fezabile (nivelul ridicat decompexitate regasindu-se in pretul ridicat al acestora).
Pag. 7
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 8/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
SISTEMUL DE ACŢIONARE PENTRU EFECTORI FINALI
Pentru actionarea efectorului final al unui robot sunt folosite in modpractic 3 sisteme de actionare: pneumatic, electric şi hidraulic. Acţionarilesunt utilizate în general în funcţie de tipul mâinii şi de tipul efectorului-final.
Figura 2 – Prindere externa
Figura 3 – Prindere interna
Conducerea pneumatică se regaseste în efectorii-finali lamajoritatea roboţilor industriali. Linia principală a sistemelor de acţionare
în conducerea pneumatică sunt cilindrul si motorul. Acestia sunt în moduzual conectaţi la deschiderea / închiderea valvelor, controlând astfeldirecţia miscării prin intermediul unui semnal electric. Pentru ajustareavitezei de mişcare a actuatorului, este nevoie de valve de reglare aevacuării aerului. Este utilizat un compresor pentru a furniza aer la
actuatori prin intermediul valvelor. Avantajul acţionarii pneumatice esteacela că este mai ieftin decât alte metode, motiv pentru care mulţi roboţi
Pag. 8
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 9/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
industriali îl utilizeaza. Un alt avantaj al sistemului de actionare pneumaticeste o rigiditate scăzută provenită de la sistemul de conducere a aerului .
Această trăsătură a sistemului pneumatic poate fi utilizată larealizarea flexibilă a prinderii, care este una din cele mai importantefuncţii ale mainii: se referă la prinderea cu atenţie a suprafeţelor delicate.Pe de altă piesa, rigiditatea relativ limitată a sistemului face dificilcontrolul precis de poziţionare. pentru acest scop se pot utiliza servo-valvele. Acestea din urma duc la o crestere a pretului, rezultatul fiinpierderea din economicitate a conducerii cu aer.
Sistemul electric este de asemenea popular. Tipic pentru efectorii finalide robot sunt trei tipuri de actuatori: motor DC (Direct Current - curentcontinu), motor AC (Alternating Current – curent alternativ), şi motoarepas cu pas. Motoarele AC au devenit mult mai populare datorita structuriiperiilor, acestea reducand costul de întreţinere şi facand sistemul utilizabilsi în medii combustibile.
În general, fiecare motor necesită un sistem de reducere a turatiilorprintr-o cutie de viteze situata în imediata apropiere a motorului, pentru aasigura la iesire forta sau momentul adecvat. Motoare cu conducereadirectă a momentelor sunt comercializate, dar datorită dimensiunilor marifac dificilă proiectarea compactă a efectorilor finali. Câteva mâini de robotutilizează acest tip de motor.
În sistemul electric amplificarea puterii este de asemenea necesarăpentru acţionarea completă a sistemului. Conducerea electrică are maimulte beneficii :
1. O mare varietate a produselor disponibile.2. Construcţie fiabilă, semnalul de proces şi sistemele de controlau devenit foarte usoare deoarece ele pot fi controlate prinsemnale electrice, permiţând utilizarea sistemelor computerizateşi controlul dispozitivelor.
3. Conducerea electrica poate fi utilizata atât pentru fortă cât şicontrolul poziţiei.
Neajunsurile sistemului electric: sunt ceva mai scumpe decâtsistemul pneumatic şi generează mai puţină putere şi rigiditate mai mică
decât sistemul hidraulic.Motoarele hidraulice utilizate în sistemele robotice sunt sisteme de
conducere electro-hidraulice. Un sistem de conducere hidraulica tipic estealcatuit din actuatori, controlul valvelor şi unitatea de forţă.
Un sistem hidraulic poate avea unul dintre urmatoarele tipuri deactuatori: cilindru-piston, motor rotativ, şi motor hidraulic. Pentru a realizacontrolul pistonului utilizând semnale electrice sunt disponibile dispozitivede conversie electrohidraulică. Pentru acest scop sunt utilizate servo-valvele electromagnetice sau electrohidaraulice.
Furnizarea celui dintai control al miscarii on/off şi furnizareaultimului control de pozitie. Datorită rigidităţii ridicate a sistemuluiconducerea hidraulică oferă cu precizie controlul poziţiei si controlul
Pag. 9
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 10/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
invariant al sarcinii. Pe de alta piesa, face controlul forţei dificil deoarecerigiditatea mare cauzează obţinerea unei presiuni mari, care are ca efectinstabilitatea sistemul de control al forţei. Un alt avantaj pretins desistemele hidraulice este acela că raţia de ieşire a forţei pe greutate poatefi mai mare decât în alte sisteme dacă este furnizată o presiune mare. A
fost arătat acest sistem de conducere pentru a furniza o cale efectiva deconstruire a unui sistem compact de mare putere.
Înafara celor trei tipuri de acţionare, in continuare vor fi prezentatecâteva metode de acţionare pentru efectorii finali de tip mână. O metodădes utilizată este folosirea unui element elastic. Un arc este utilizat îngeneral pentru asigurarea acţiunii de retragere automată a mecanismelorde apucare antrenate pneumatic sau de sisteme hidraulice.
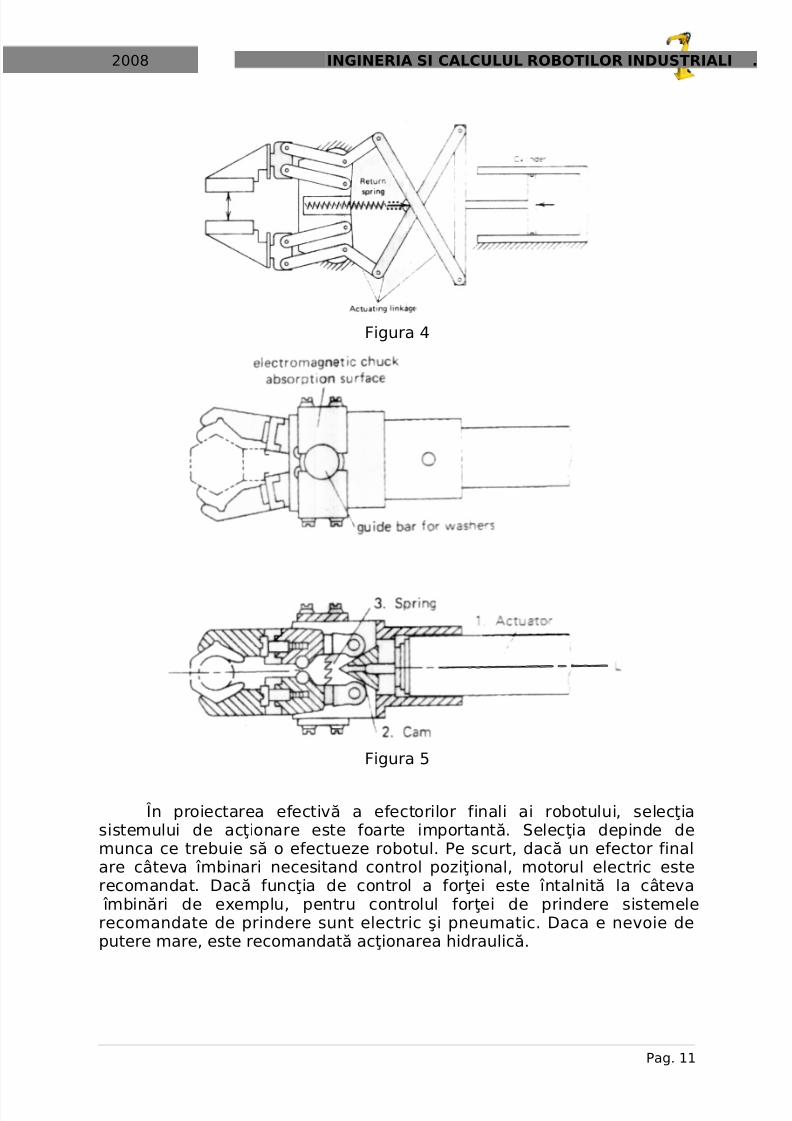
Figura 4 arată legătura dintre un arc încărcat şi mecanismul deprindere acţionat de un cilindru pneumatic (Sheldon. 1972). Acţiunea deapucare este efectuată prin acţiunea pneumatică unidirecţională, în timpce forţa arcului este utilizată pentru revenirea automată a degetelor .Această metodă simplifica considerabil proiectarea circuitelor pneumaticesau hidraulice care conlucreaza cu sistemul de control. Forţa arcului poatefi utilizată de asemenea pentru acţiunea de prindere. În acest caz, forţade prindere este influenţată de forţa arcului, pentru producerea unei forţemari de apucare este necesară o rigiditate mare a arcului. Acesteacauzează de obicei necesitatea introducerii de actuatori a unei puteri mairidicate pentru acţiunea de revenire a degetelor. Pentru aceasta uzulforţei arcului pentru apucare este limitată la forţe de apucare mici,mecanisme de apucare pentru manevrarea parţilor mici de maşină
asemeni şuruburilor, piuliţelor şi bolţurilor. Forţa arcului poate fi utilizatăpentru o mişcare unidirecţională a actuatorilor pneumatici sau hidraulicideoarece pistonul poate fi uşor mişcat de forţa aplicată axei de ieşire.Combinarea unui arc cu un motor electric nu este viabilă deoarece în modnormal motorul electric include un reductor care face dificilă transmitereainversă a forţei de la axul de ieşire .
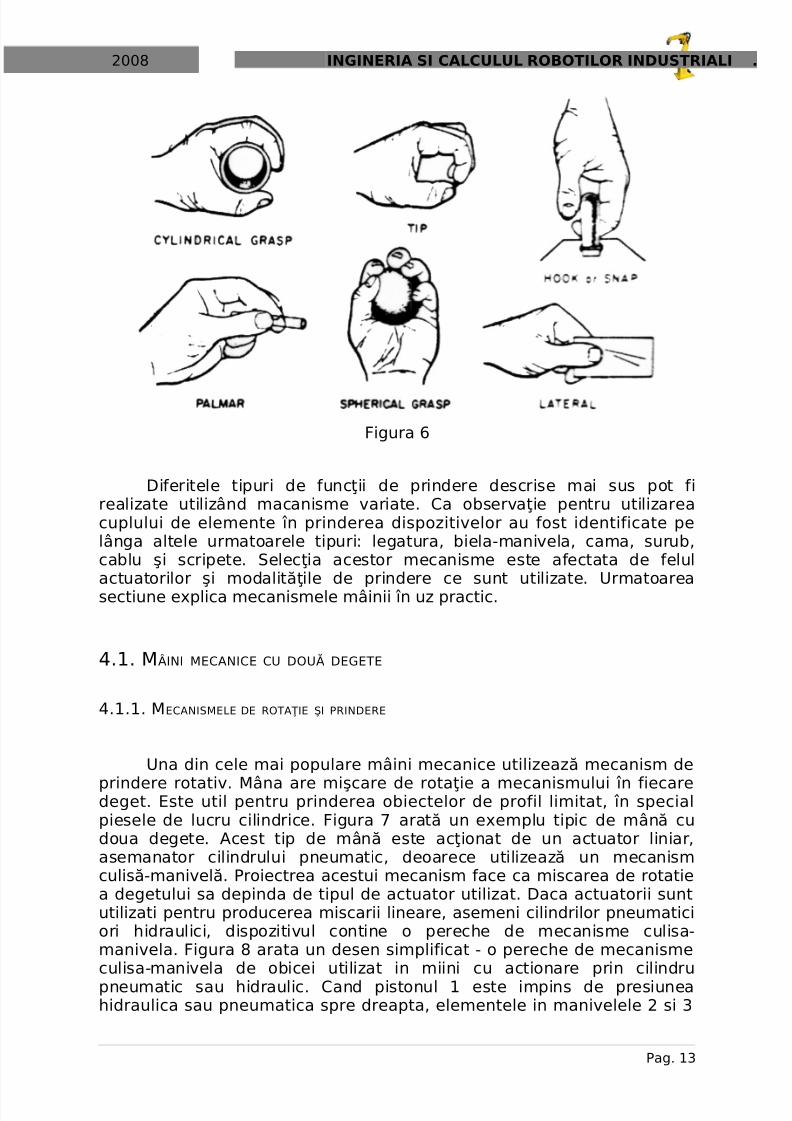
O altă metodă interesantă utilizează electromagneţi. Actuatorulelectromagnetic e compus dintr-un cap magnetic construit din miezferomagnetic, bobina conductoare şi tija actuatorului realizată dinmateriale feroase. Când bobina este acţionată, capul magnetic atrage tija
actuatorului, şi deplasarea actuatorului este fixată la poziţia specificată.Când bobina nu este acţionată, tija actuatorului se poate mişca liberă.Acest gen de actuator este utilizat de obicei cu un arc ceea ce permite undublu control al poziţiei de ieşire.
Figura 5 arată o mână utilizând acţionare electromagnetică.Electromagnetul actuatorului 1 produce mişcarea lineara spre stânga de-alungul liniei L-L . Mişcarea este convertită în acţiunea de prindere prinintermediul camelor 2. Acţiunea de revenire este realizată de arcul 3.Acest fel de actuator poate fi utilizat în mod obişnuit pentru curse scurte,deoarece forţa produsă de capul magnetic descreşte în acord cucreşterea deplasării actuatorului. Acesată metodă de acţionare poate fiutilizată efectiv doar pentru prindera pieselor mici.
Pag. 10
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 11/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 4
Figura 5
În proiectarea efectivă a efectorilor finali ai robotului, selecţiasistemului de acţionare este foarte importantă. Selecţia depinde demunca ce trebuie să o efectueze robotul. Pe scurt, dacă un efector finalare câteva îmbinari necesitand control poziţional, motorul electric esterecomandat. Dacă funcţia de control a forţei este întalnită la câteva
îmbinări de exemplu, pentru controlul forţei de prindere sistemelerecomandate de prindere sunt electric şi pneumatic. Daca e nevoie deputere mare, este recomandată acţionarea hidraulică.
Pag. 11

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 12/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
MÂINI MECANICE
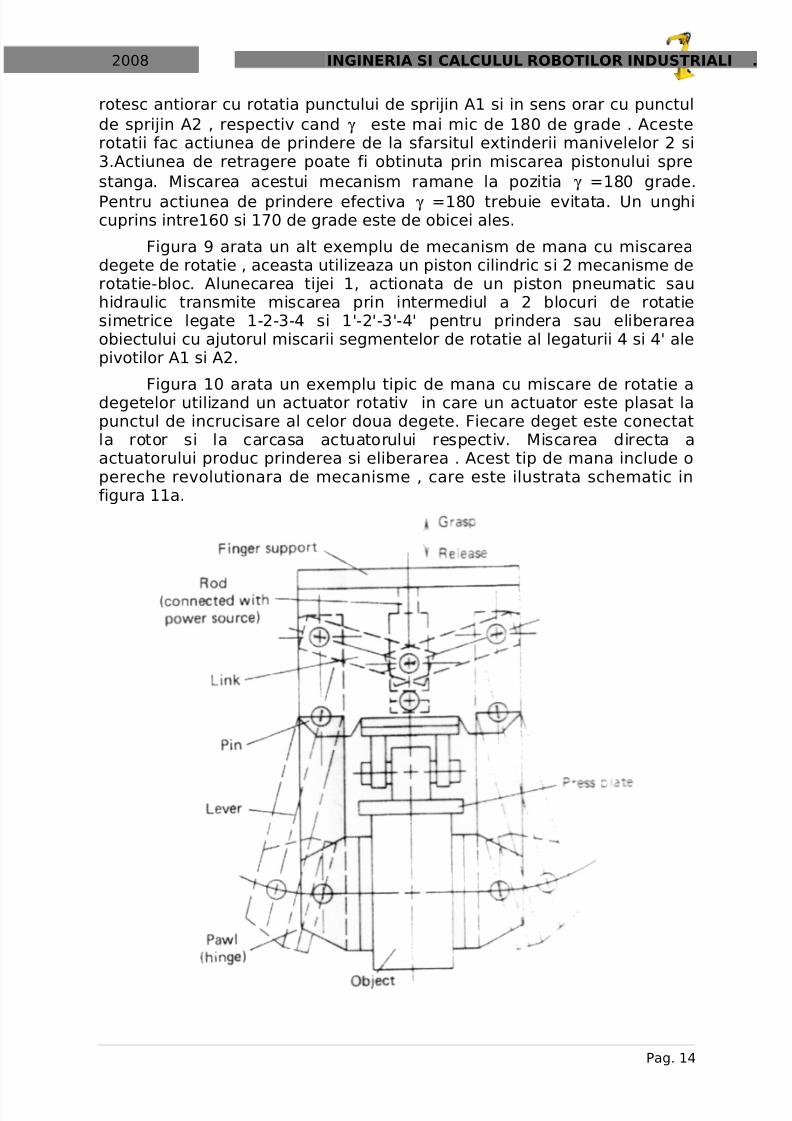
Strângerea mâinii umane se împarte în 6 tipuri de apucare:palmară, laterală, cilindrică, sferică, la varf şi carlig. Vezi figura 6. Crossleyşi Umholts au clasificat funcţiile de manipulare după mâna umană în 9tipuri: trigger grip, flipping a swich, transfer pipe to grip, usecutters, pen screw, cigarette roll, pen transfer, papewrite, şi penwrite. Mâna umană poate efectua funcţii variate de prindere utilizând 5degete cu încheieturi. În proiectarea unei mâini, subansamblul de tipuri deprindere umană şi mâna manipulatoare este ales in conformitate cunecesarul aplicaţiei. Pentru a realiza minimul funcţiei de prindere, o mânăare nevoie de 2 degete conectate între ele utilizând o legatură cu 2 gradede libertate pentru mişcarea de închidere – deschidere. Dacă mâna are 2degete rigide are posibilitatea de a prinde doar obiecte cu profile limitateşi nu este capabil să închidă obiectele de profiluri variate. De asemeneaacest tip de mână nu poate avea funcţii de manipulare deoarece toategradele de libertate sunt folosite pentru menţinerea strângerii. Aici suntdoua căi de a improviza capabilitatea de acomodare la schimbarile deprofil ale obiectului. O soluţie este de a pune încheieturi pe fiecare degetacesta putandu-se mişca în conformitate cu profilul obiectului de apucat.Un altul este cresterea numărului de degete.
Funcţiile de manipulare emerg de asemenea din constrangerile
proiectului (operatiei de executat). Pentru manipularea obiectelor, uzualmâna trebuie să aibă mai multe degete şi acţionarea încheieturilorexternă şi independentă, facând mâna astfel proiectată functionala pentruprinderea obiectelor. Mai multe degete, încheieturi, şi grade de libertatemâna are mai multă versatilitate şi dexteritate. Cu aceste principii înminte, poate fi selectat tipul mâinii şi mecanica proiectului considerat.
Pag. 12
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 13/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 6
Diferitele tipuri de funcţii de prindere descrise mai sus pot firealizate utilizând macanisme variate. Ca observaţie pentru utilizareacuplului de elemente în prinderea dispozitivelor au fost identificate pelânga altele urmatoarele tipuri: legatura, biela-manivela, cama, surub,cablu şi scripete. Selecţia acestor mecanisme este afectata de felulactuatorilor şi modalităţile de prindere ce sunt utilizate. Urmatoareasectiune explica mecanismele mâinii în uz practic.
4.1. MÂINI MECANICE CU DOUĂ DEGETE
4.1.1. MECANISMELE DE ROTAŢIE ŞI PRINDERE
Una din cele mai populare mâini mecanice utilizează mecanism de
prindere rotativ. Mâna are mişcare de rotaţie a mecanismului în fiecaredeget. Este util pentru prinderea obiectelor de profil limitat, în specialpiesele de lucru cilindrice. Figura 7 arată un exemplu tipic de mână cudoua degete. Acest tip de mână este acţionat de un actuator liniar,asemanator cilindrului pneumatic, deoarece utilizează un mecanismculisă-manivelă. Proiectrea acestui mecanism face ca miscarea de rotatiea degetului sa depinda de tipul de actuator utilizat. Daca actuatorii suntutilizati pentru producerea miscarii lineare, asemeni cilindrilor pneumaticiori hidraulici, dispozitivul contine o pereche de mecanisme culisa-manivela. Figura 8 arata un desen simplificat - o pereche de mecanismeculisa-manivela de obicei utilizat in miini cu actionare prin cilindrupneumatic sau hidraulic. Cand pistonul 1 este impins de presiuneahidraulica sau pneumatica spre dreapta, elementele in manivelele 2 si 3
Pag. 13
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 14/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
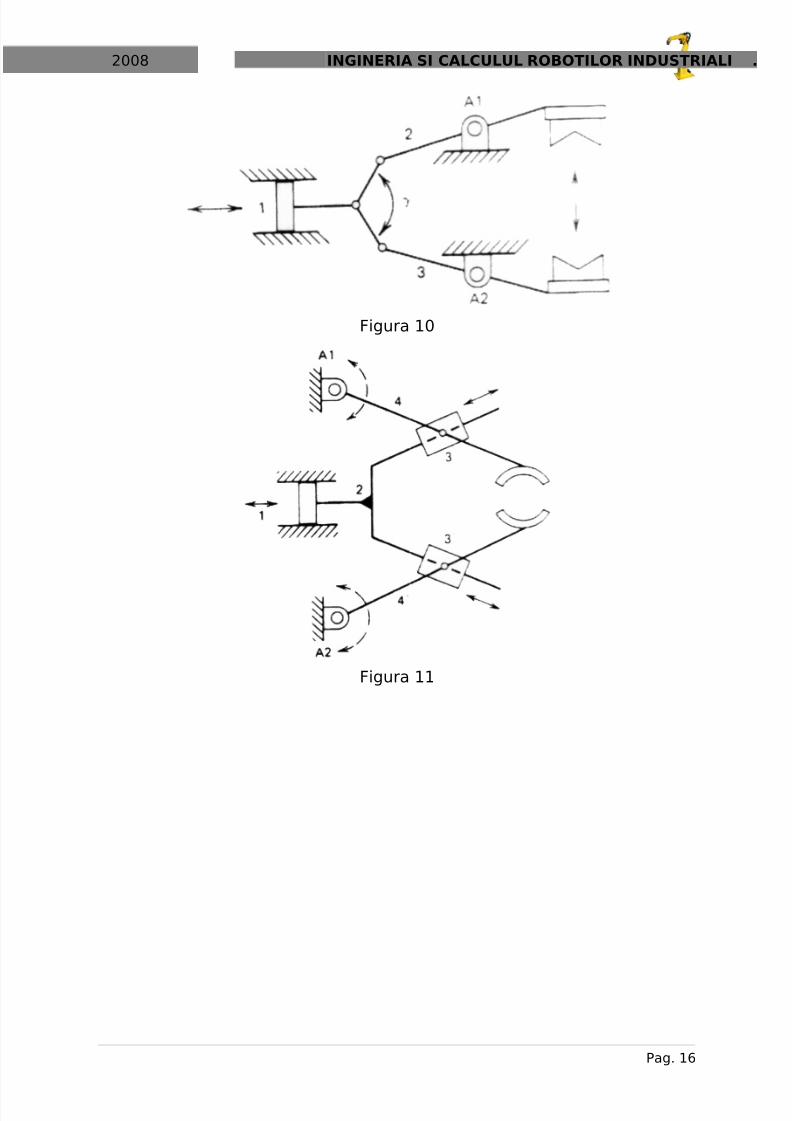
rotesc antiorar cu rotatia punctului de sprijin A1 si in sens orar cu punctulde sprijin A2 , respectiv cand γ este mai mic de 180 de grade . Acesterotatii fac actiunea de prindere de la sfarsitul extinderii manivelelor 2 si3.Actiunea de retragere poate fi obtinuta prin miscarea pistonului sprestanga. Miscarea acestui mecanism ramane la pozitia γ =180 grade.
Pentru actiunea de prindere efectiva γ =180 trebuie evitata. Un unghicuprins intre160 si 170 de grade este de obicei ales.
Figura 9 arata un alt exemplu de mecanism de mana cu miscareadegete de rotatie , aceasta utilizeaza un piston cilindric si 2 mecanisme derotatie-bloc. Alunecarea tijei 1, actionata de un piston pneumatic sauhidraulic transmite miscarea prin intermediul a 2 blocuri de rotatiesimetrice legate 1-2-3-4 si 1'-2'-3'-4' pentru prindera sau eliberareaobiectului cu ajutorul miscarii segmentelor de rotatie al legaturii 4 si 4' alepivotilor A1 si A2.
Figura 10 arata un exemplu tipic de mana cu miscare de rotatie adegetelor utilizand un actuator rotativ in care un actuator este plasat lapunctul de incrucisare al celor doua degete. Fiecare deget este conectatla rotor si la carcasa actuatorului respectiv. Miscarea directa aactuatorului produc prinderea si eliberarea . Acest tip de mana include opereche revolutionara de mecanisme , care este ilustrata schematic infigura 11a.
Pag. 14

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 15/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 7
Figura 8
Figura 9
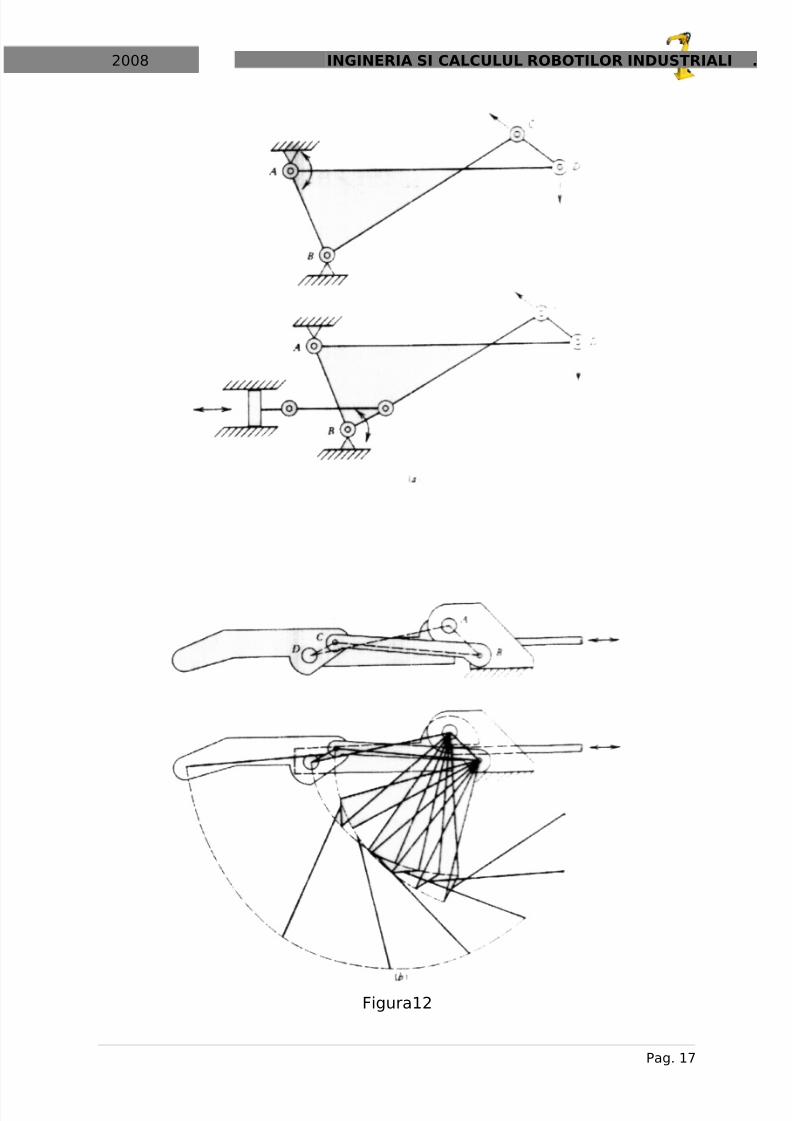
In acord cu diferitele tipuri de actuatori utilizati mai degrabade actuatorul rotativ, aici sunt variatii diverse in constructiaacestui tip de mana. Doua sunt aratate in figura 11b si c. Figura11b utilizeaza un actuator cu piston cilindric in loc de un actuaror rotativ.Figura 11c prezinta o mana ce utilizeaza o cama ce converteste miscarealiniara a pistonului in actiunea de prindere/eliberere. Un exemplu deaplicatie al acestui mecanism a fost aratat in figura 5 . Figura 12a arata o
legatura de tipul cruce cu bara transversala , mecanism cu 2 puncte dereazem A si B . Acest mecanism este utilizat uneori pentru a facemiscarea de indoire a degetului . Figura 12b arata un exemplu tipic dedeget construit cu o legatura in cruce cu bara transversala.Sunt 2 cai deactivare a acestui mecanism . Prima , poate fi utilizat un actuator derotatie in punctele A si B pentru rotirea elementului AD sau BC. Miscareaactuatorului produce rotirea legaturii elementului CD, care probuce omiscare de indoire a degetului . A doua , un mecanism culisa-manivelaactivat de un piston cilindric poate fi utilizat pentru rotatia elementului ADsau BC . Ilustratia de mai jos , figura 12b, descrie acest tip de actionare.Miscarea de indoire a degetului poate fi obtinuta in acelasi mod asemeniactuatorilor de rotatie. Utilizarea mecanismului cruce încrucişata oferăposibilitatea de a cuprinde obiectul cu degetele. Acest mecanism poate fiutilizat pentru o mână ce are mai mult de 2 degete.
4.1.2 MÂNA CU MECANISM DE TRANSLAŢIE
Mecanismul de translaţie este un alt mecanism de prinderecunoscut utilizat în mare măsură în mâinile roboţilor industriali. Permite
închiderea şi deschiderea degetelor fară a-i schimba comportamentul.Mecanismul este de obicei puţin mai complex decât cele de rotaţie.Simplitatea mâinii de translaţie consta in utilizearea directa a mişcariiactuator de tip cilindru- piston. Figura 13 arată asemăntor unei mâiniutilizând un piston cilindric pneumatic sau hidraulic.
Pag. 15
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 16/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 10
Figura 11
Pag. 16
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 17/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura12
Pag. 17

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 18/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
In figurile prezentate mai sus, mişcarea degetului corespunde cumişcarea pistonului fara a conecta alte mecanisme între ele. Neajunsulacestei abordari este că mărimea actuatorului determină marimea mâinii,ceea ce face dificilă proiectarea mâinii. Rezistenţa proprie a mecanismuluiconceput in acest mod este potrivită pentru proiectarea de mâini de
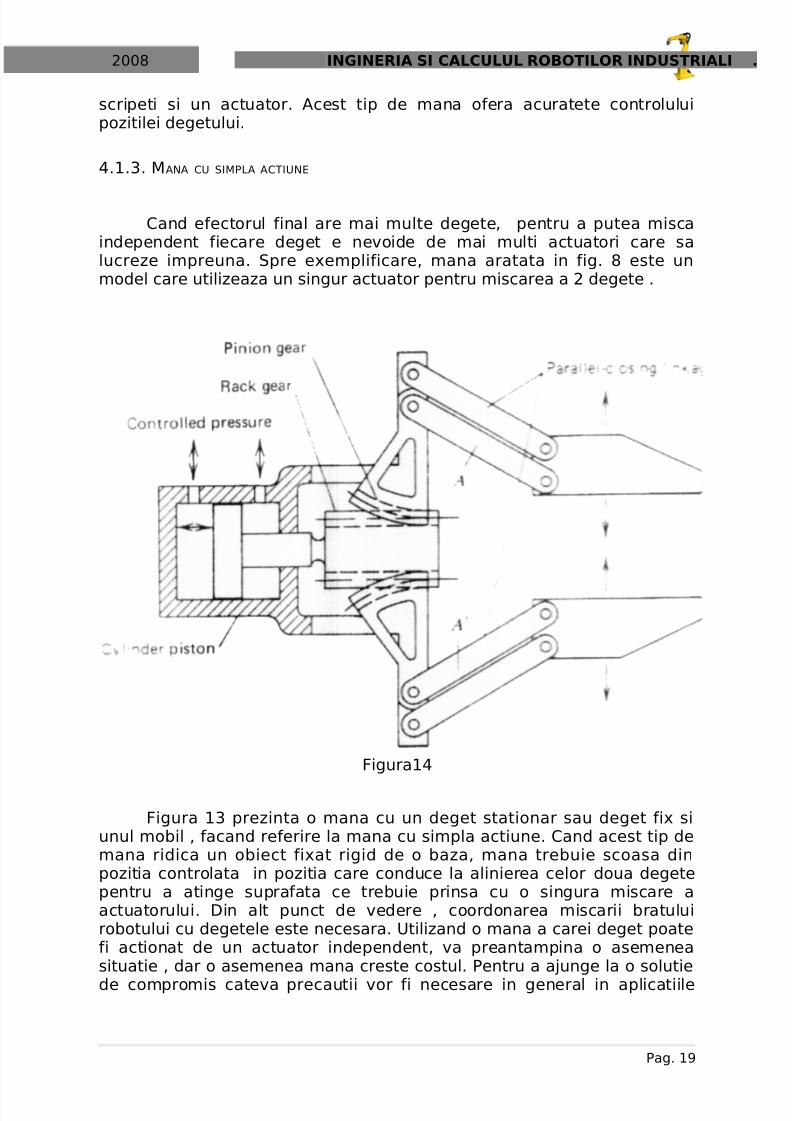
translaţie cu dechidere mare.Figura 14 arată o mână de actionat cu un mecanism de translatie
utilizand un piston pneumatic sau hidraulic, care include un dublumecanism cremaliera si 2 perechi simetrice de legaturi de inchidereparalele. Acest mecanism de mana este larg utilizat. Pinionul angrenajuluieste conectat la elementele A respectiv A'. Cand miscarea spre stanga apistonului este posibila, translatia cremalierei cauzeaza pinionului 2 rotatiiin sens orar si respectiv antiorar, producand eliberarea, pastrand directiafiecarui deget constanta. Actiunea de prindere are loc cand tija pistonuluise deplaseaza spre dreapta in aceeasi directie. O alta modalitate de
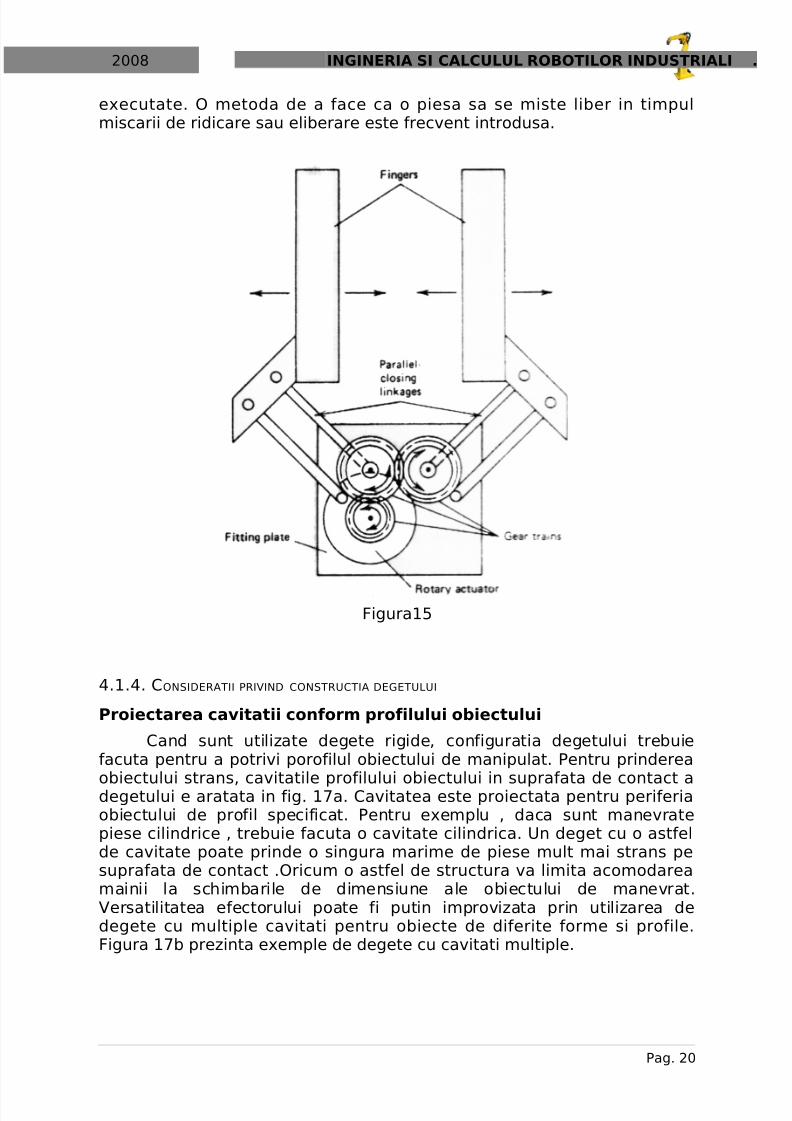
miscare a legaturilor de inchidere paralele este in figura 14. Figura 15arata un mecanism utilizand un actuator rotativ si roti dintate in loc de ocombinatie intre 2 pistoane si cremaliere in figura 14.
Figura13
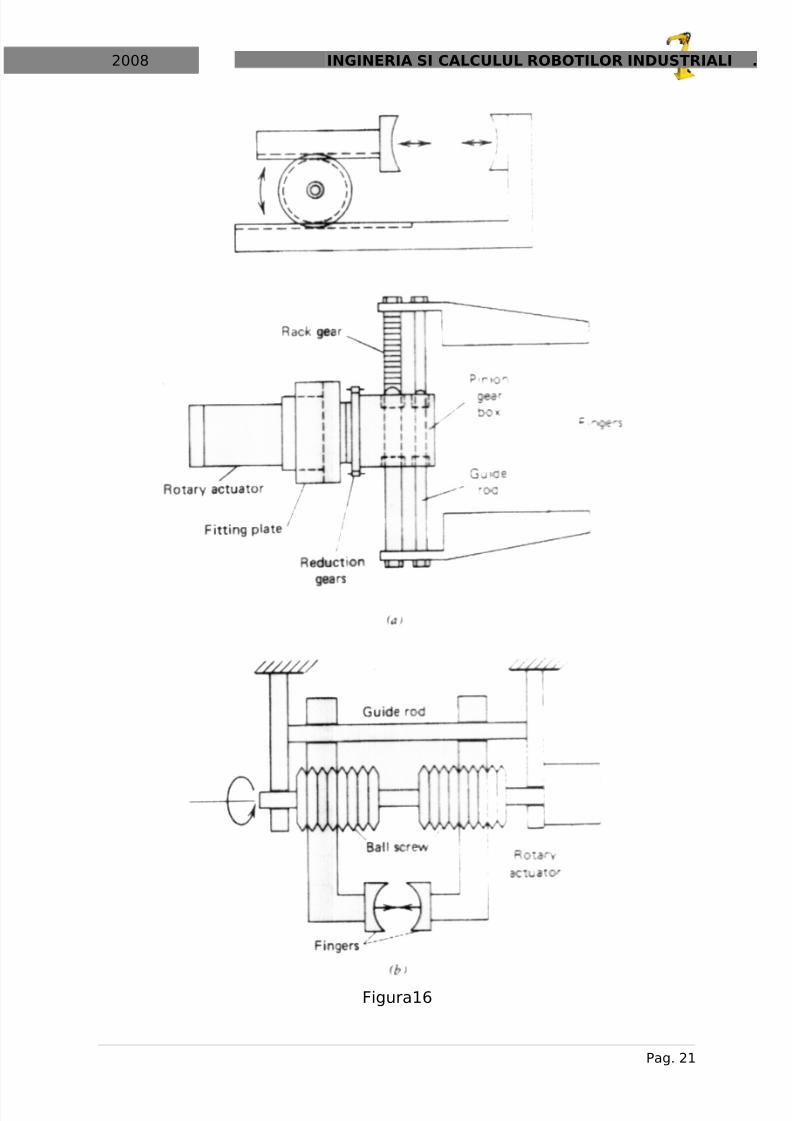
Figura 16 prezinta alte 2 exemple de mecanism pentru maini detranslatie utilizand actuatori rotativi. Fig. 16a contine un actuator si unmecanism pinion cremaliera . Avantajul acestei maini este ca se poateacomoda unei categorii mari de dimensiuni. Fig. 16b include 2 seturi de
Pag. 18
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 19/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
scripeti si un actuator. Acest tip de mana ofera acuratete controluluipozitilei degetului.
4.1.3. MANA CU SIMPLA ACTIUNE
Cand efectorul final are mai multe degete, pentru a putea miscaindependent fiecare deget e nevoide de mai multi actuatori care salucreze impreuna. Spre exemplificare, mana aratata in fig. 8 este unmodel care utilizeaza un singur actuator pentru miscarea a 2 degete .
Figura14
Figura 13 prezinta o mana cu un deget stationar sau deget fix siunul mobil , facand referire la mana cu simpla actiune. Cand acest tip demana ridica un obiect fixat rigid de o baza, mana trebuie scoasa dinpozitia controlata in pozitia care conduce la alinierea celor doua degetepentru a atinge suprafata ce trebuie prinsa cu o singura miscare aactuatorului. Din alt punct de vedere , coordonarea miscarii bratuluirobotului cu degetele este necesara. Utilizand o mana a carei deget poatefi actionat de un actuator independent, va preantampina o asemeneasituatie , dar o asemenea mana creste costul. Pentru a ajunge la o solutiede compromis cateva precautii vor fi necesare in general in aplicatiile
Pag. 19
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 20/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
executate. O metoda de a face ca o piesa sa se miste liber in timpulmiscarii de ridicare sau eliberare este frecvent introdusa.
Figura15
4.1.4. CONSIDERATII PRIVIND CONSTRUCTIA DEGETULUI
Proiectarea cavitatii conform profilului obiectului
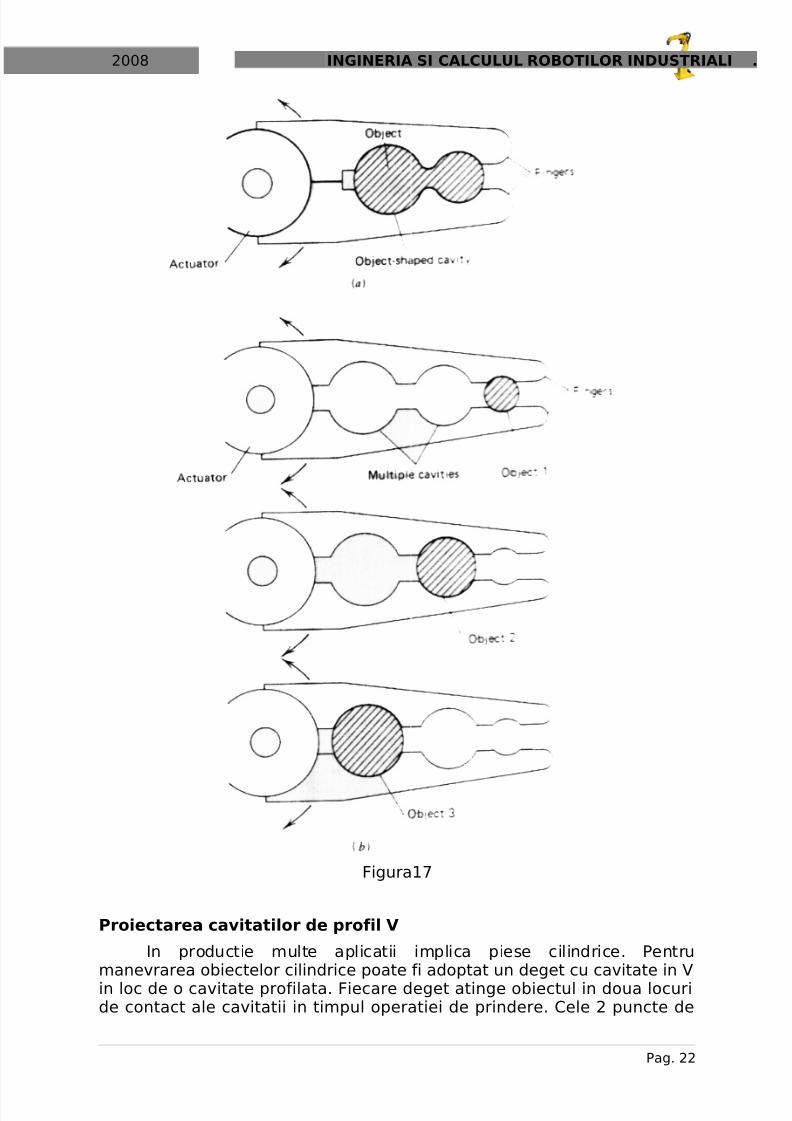
Cand sunt utilizate degete rigide, configuratia degetului trebuiefacuta pentru a potrivi porofilul obiectului de manipulat. Pentru prinderea
obiectului strans, cavitatile profilului obiectului in suprafata de contact adegetului e aratata in fig. 17a. Cavitatea este proiectata pentru periferiaobiectului de profil specificat. Pentru exemplu , daca sunt manevratepiese cilindrice , trebuie facuta o cavitate cilindrica. Un deget cu o astfelde cavitate poate prinde o singura marime de piese mult mai strans pesuprafata de contact .Oricum o astfel de structura va limita acomodareamainii la schimbarile de dimensiune ale obiectului de manevrat.Versatilitatea efectorului poate fi putin improvizata prin utilizarea dedegete cu multiple cavitati pentru obiecte de diferite forme si profile.Figura 17b prezinta exemple de degete cu cavitati multiple.
Pag. 20
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 21/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura16
Pag. 21
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 22/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura17
Proiectarea cavitatilor de profil V
In productie multe aplicatii implica piese cilindrice. Pentrumanevrarea obiectelor cilindrice poate fi adoptat un deget cu cavitate in Vin loc de o cavitate profilata. Fiecare deget atinge obiectul in doua locuride contact ale cavitatii in timpul operatiei de prindere. Cele 2 puncte de
Pag. 22
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 23/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
contact aplica o forta mare de stringere. Limitarea suprafetei de prinderepoate conduce la deformarea sau zgarierea obiectului. Oricum ,in multeaplicatii aceasta problema nu este semnificativa , si acest dispozitiv aremari avantaje fata de o mana cu cavitati profilate. Un avantaj este acelaca se poate acomoda unei mari clase de diametre variate ale pieselor
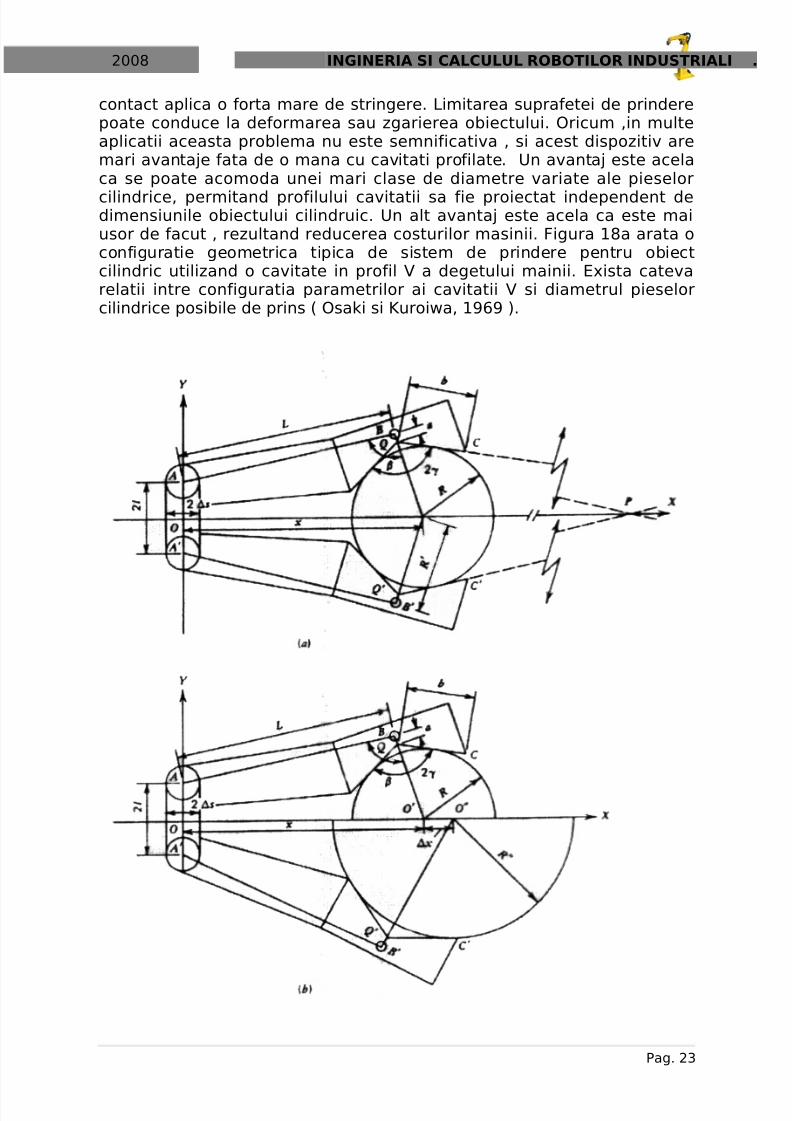
cilindrice, permitand profilului cavitatii sa fie proiectat independent dedimensiunile obiectului cilindruic. Un alt avantaj este acela ca este maiusor de facut , rezultand reducerea costurilor masinii. Figura 18a arata oconfiguratie geometrica tipica de sistem de prindere pentru obiectcilindric utilizand o cavitate in profil V a degetului mainii. Exista catevarelatii intre configuratia parametrilor ai cavitatii V si diametrul pieselorcilindrice posibile de prins ( Osaki si Kuroiwa, 1969 ).
Pag. 23

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 24/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 18
Presupunand parametrii de prindere ai sistemului γ ,β ,R,R',L,l,a si b,simbolurile B,C,Q,B',Q' si O', s coordonatele sistemului O-xy sunt definitein figura aratata . Intrucat piesa cilindrica prinsa si constructia mainii nu
se pot intersecta , este obtinuta urmatoarea inegalitate: s R x ∆<− ( )1
unde ∆ s este ½ din latimea elementului mainii si x este distanta dintrecentrul piesei cilindrice si originea O, aratata in fig. 18a. Distanta x esteexprimata prin urmatoarea expresie:
2
2
2
cossin
2sin
l a R
La R
L x −
+−
++= β
γ γ ( )2
In mainile de rotatie , pozitia degetelor va fi adesea proiectata incat
β sa fie o valoare constanta. Daca β = 90 ,cum este in general, ecuatia 2devine:
2
2
2
sinl a
R L x −
++=γ ( )3
Intr-o mana de translatie in care blocul cavitatii este tinut paralel cuorice altceva in uz. Adica, pentru <BO'O = 90° poate fi obtinutaurmatoarea ecuatie:
Ll R−
= 'cos β
+= a R
Rγ sin
'
( )4
Dupa substitutia ecuatiei (4) in ecuatia (2), x poate fi experimat infelul urmator:
2
2
sin
−+−= l a R
L xγ ( )5
Pentru ca fiecare deget sa aiba contact cu obiectul in doua punctepe suprafata cavitatii, D,γ , si b trebuie sa satisfaca urmatoareainegalitate :
γ tan2b D < ( )6
unde D este diametrul obiectului cilindric si este egal cu 2R. Daca graifarulde rotatie este fictiv , trebuie considerata o alta conditie deoarece directialongitudinala a fiecarui deget variaza cu obiectele de marimi diferite.Pentru a tine cu siguranta un obiect in mana fara alunecare , extinderealiniei QC trebuie sa intersecteze extinderea liniei Q'C' in punctul P inpiesaa frontala a mainii. Pentru aceasta constrangere , diametrul superior
Pag. 24
D 2 sinγ ⋅ L tan⋅π
2γ −
⋅l
tan π2
γ −
⋅
+
⋅< 7( )
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 25/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
limitat de obiect ce poate fi prins de mana este exprimat prin cativaparametrii ai cavitatii dupa cum urmeaza:
In cazul in care l = 0, asemeni in figura 10, ecuatia ( 7) devine :
Daca sunt utilizate mainile cu translatie, inegalitatea (7) sau (8) potfi ignorate deoarece pozitia degetului si profilului V sunt tinute constant.Ecuatia (1), (6), (7) si(8) furnizeaza parametrii relatiilor ce suntconsiderate cand cavitatea profilului V este proiectata. O alta consideratiein proiectarea profilului V este aceea ca coordonata x al centruluiobiectului cilindric variaza cu diametrul. Aceasta poate fi reorganizatadupa ecuatiile (2), (3) si (5). Figura 18b explica deviatia (O'O'' = ∆ x ) de lapozitia centrala de 2 dimensiuni diferite ale obiectelor prinse in mana .Deviatia va fi nesemnificativa pentru unele aplicatii.
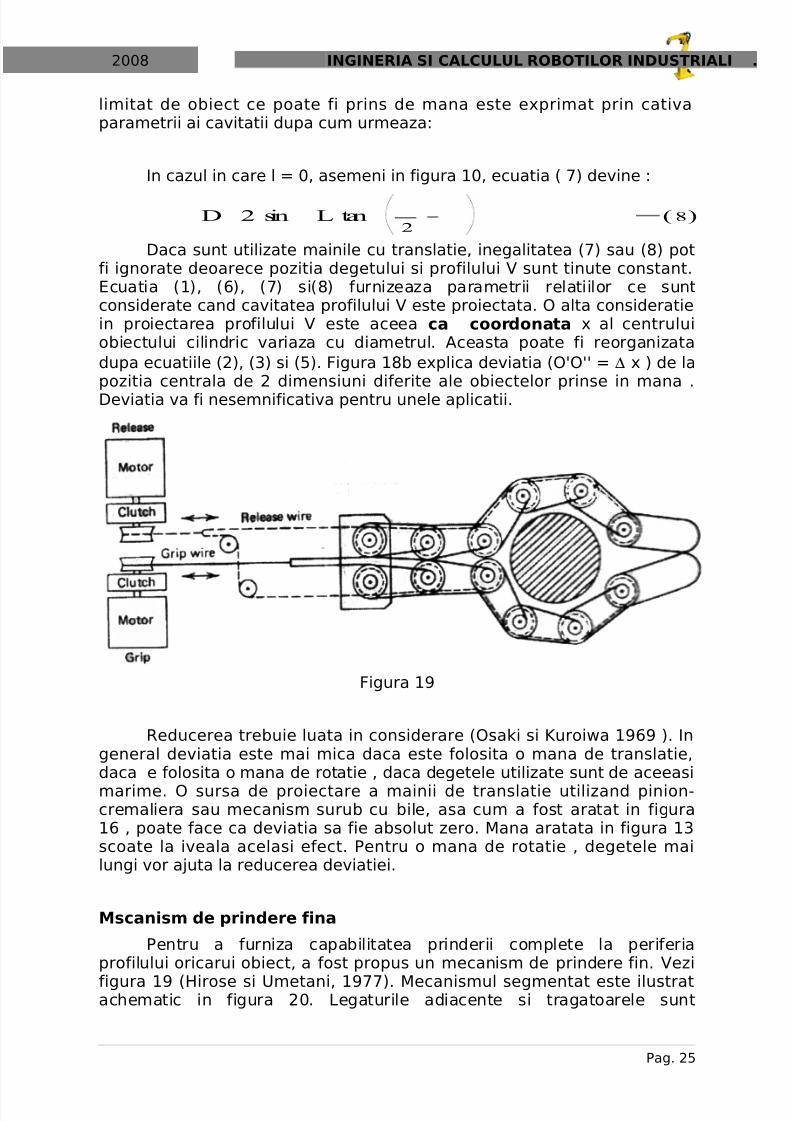
Figura 19
Reducerea trebuie luata in considerare (Osaki si Kuroiwa 1969 ). Ingeneral deviatia este mai mica daca este folosita o mana de translatie,daca e folosita o mana de rotatie , daca degetele utilizate sunt de aceeasimarime. O sursa de proiectare a mainii de translatie utilizand pinion-cremaliera sau mecanism surub cu bile, asa cum a fost aratat in figura16 , poate face ca deviatia sa fie absolut zero. Mana aratata in figura 13scoate la iveala acelasi efect. Pentru o mana de rotatie , degetele mailungi vor ajuta la reducerea deviatiei.
Mscanism de prindere fina
Pentru a furniza capabilitatea prinderii complete la periferiaprofilului oricarui obiect, a fost propus un mecanism de prindere fin. Vezi
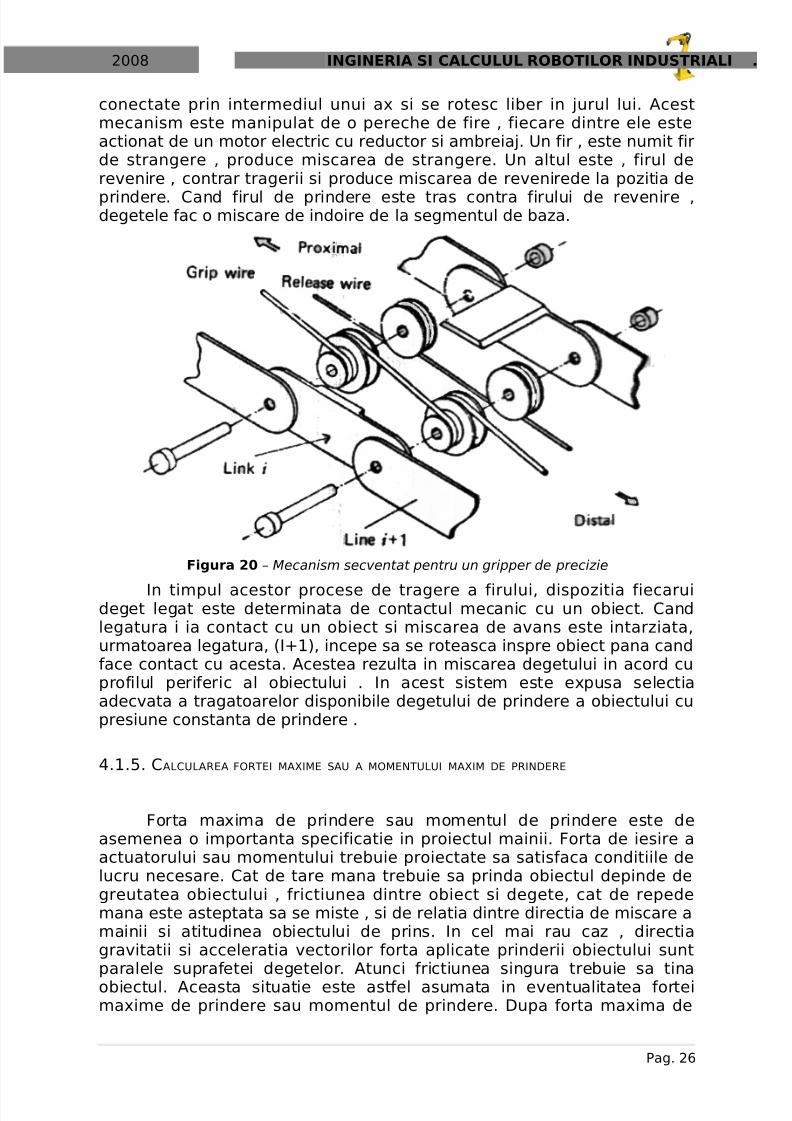
figura 19 (Hirose si Umetani, 1977). Mecanismul segmentat este ilustratachematic in figura 20. Legaturile adiacente si tragatoarele sunt
Pag. 25
D 2 sin L tan2
8( )
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 26/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
conectate prin intermediul unui ax si se rotesc liber in jurul lui. Acestmecanism este manipulat de o pereche de fire , fiecare dintre ele esteactionat de un motor electric cu reductor si ambreiaj. Un fir , este numit firde strangere , produce miscarea de strangere. Un altul este , firul derevenire , contrar tragerii si produce miscarea de revenirede la pozitia de
prindere. Cand firul de prindere este tras contra firului de revenire ,degetele fac o miscare de indoire de la segmentul de baza.
Figura 20 – Mecanism secventat pentru un gripper de precizie
In timpul acestor procese de tragere a firului, dispozitia fiecaruideget legat este determinata de contactul mecanic cu un obiect. Candlegatura i ia contact cu un obiect si miscarea de avans este intarziata,urmatoarea legatura, (I+1), incepe sa se roteasca inspre obiect pana candface contact cu acesta. Acestea rezulta in miscarea degetului in acord cuprofilul periferic al obiectului . In acest sistem este expusa selectiaadecvata a tragatoarelor disponibile degetului de prindere a obiectului cupresiune constanta de prindere .
4.1.5. CALCULAREA FORTEI MAXIME SAU A MOMENTULUI MAXIM DE PRINDERE
Forta maxima de prindere sau momentul de prindere este deasemenea o importanta specificatie in proiectul mainii. Forta de iesire aactuatorului sau momentului trebuie proiectate sa satisfaca conditiile delucru necesare. Cat de tare mana trebuie sa prinda obiectul depinde degreutatea obiectului , frictiunea dintre obiect si degete, cat de repedemana este asteptata sa se miste , si de relatia dintre directia de miscare amainii si atitudinea obiectului de prins. In cel mai rau caz , directiagravitatii si acceleratia vectorilor forta aplicate prinderii obiectului suntparalele suprafetei degetelor. Atunci frictiunea singura trebuie sa tinaobiectul. Aceasta situatie este astfel asumata in eventualitatea forteimaxime de prindere sau momentul de prindere. Dupa forta maxima de
Pag. 26
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 27/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
prindere sau momentul de prindere au fost determinate , forta saumomentul ce actuatorul trebuie sa o genereze poate fi luata in calcul.Calcularea acestor valori necesare conversiei fortei sau momentului deiesire a actuatorului in forta sau moment de prindere, depinde de felulactuatorului si mecanisnele folosite. Tabelul 1 arata relatia dintre forta sau
momentul de iesire a actuatorului si forta de prindere pentru mana cuvariate feluri de mecanisme si actuatori .
4.2. MAINI MECANICE CU TREI SAU CINCI DEGETE
4.2.1. MANA CU TREI DEGETE
Cresterea numarului de degete si a numarului g.d.l. va imbunatatiifoarte mult versatilitatea mainii, dar va complica de asemenea procesulde proiectare. Metodele de proiectare pentru mainile cu 3 degete nu suntinca puse la punct din sub aspect practic. Oricum, cateva exemple au fostdezvoltate in special pentru uzul experimental sau cercetare. Cel maisimplu exemplu este o mana cu trei degete si o cupla condusa de unactuator potrivit.
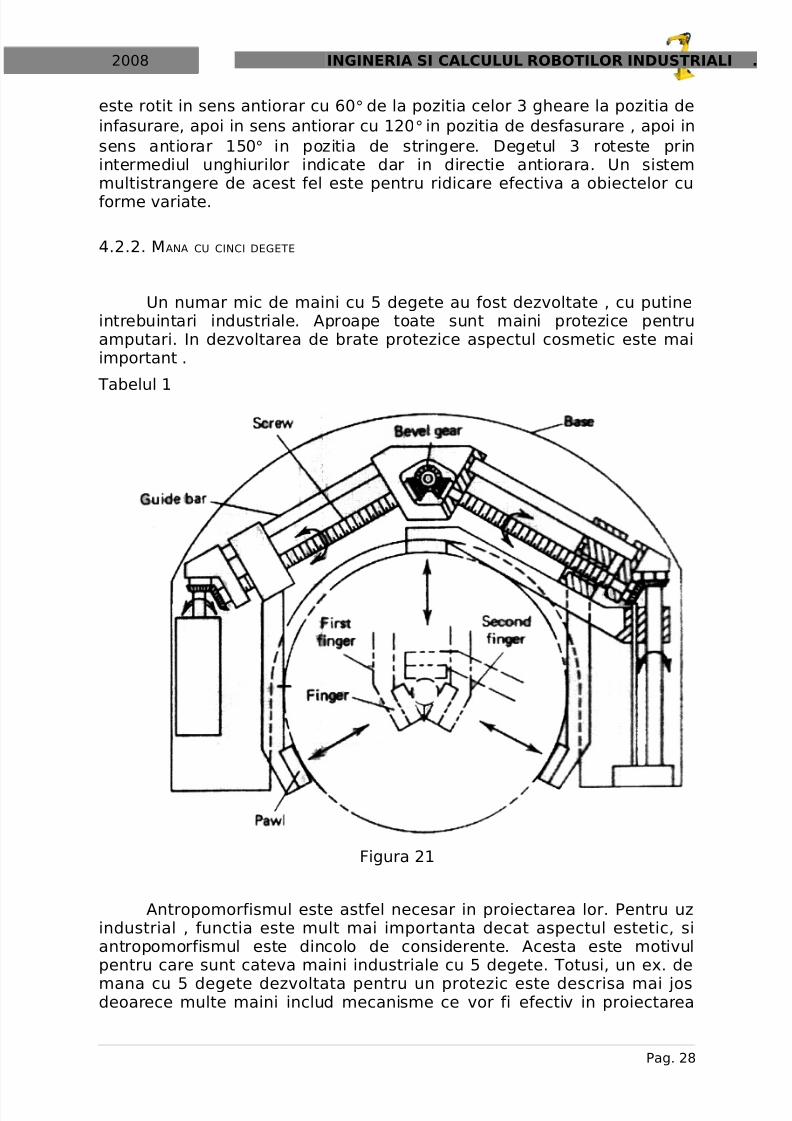
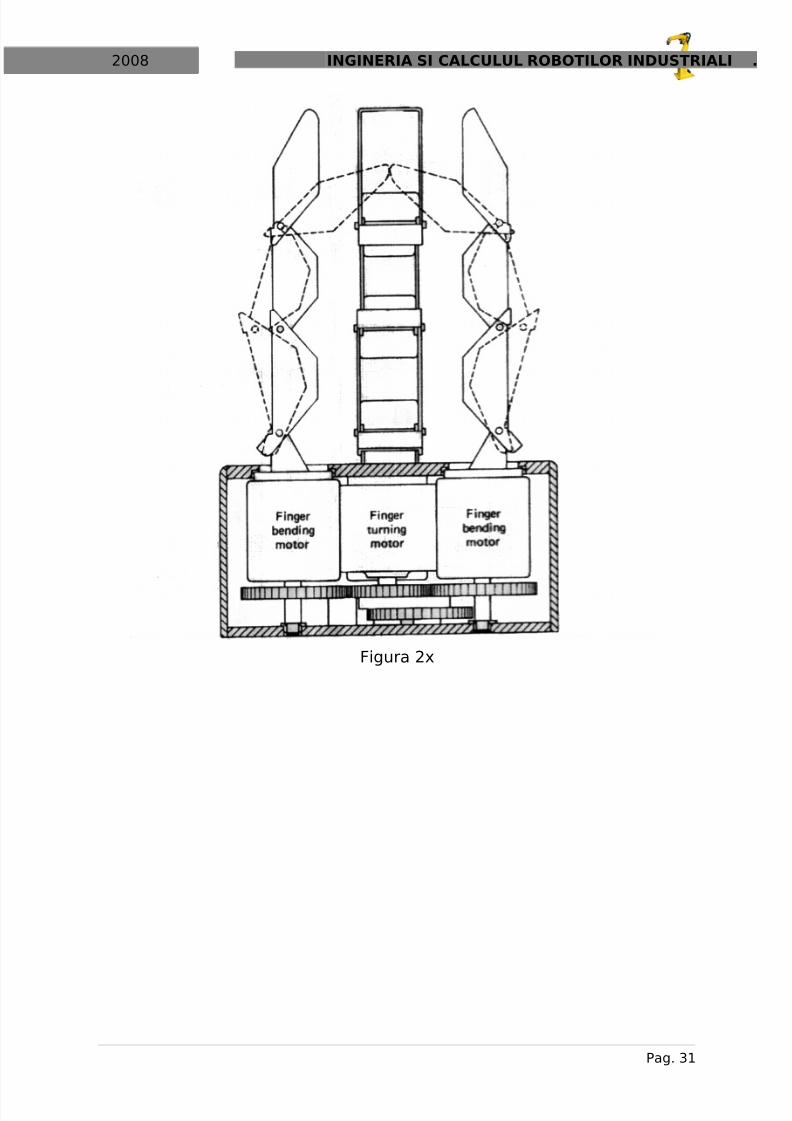
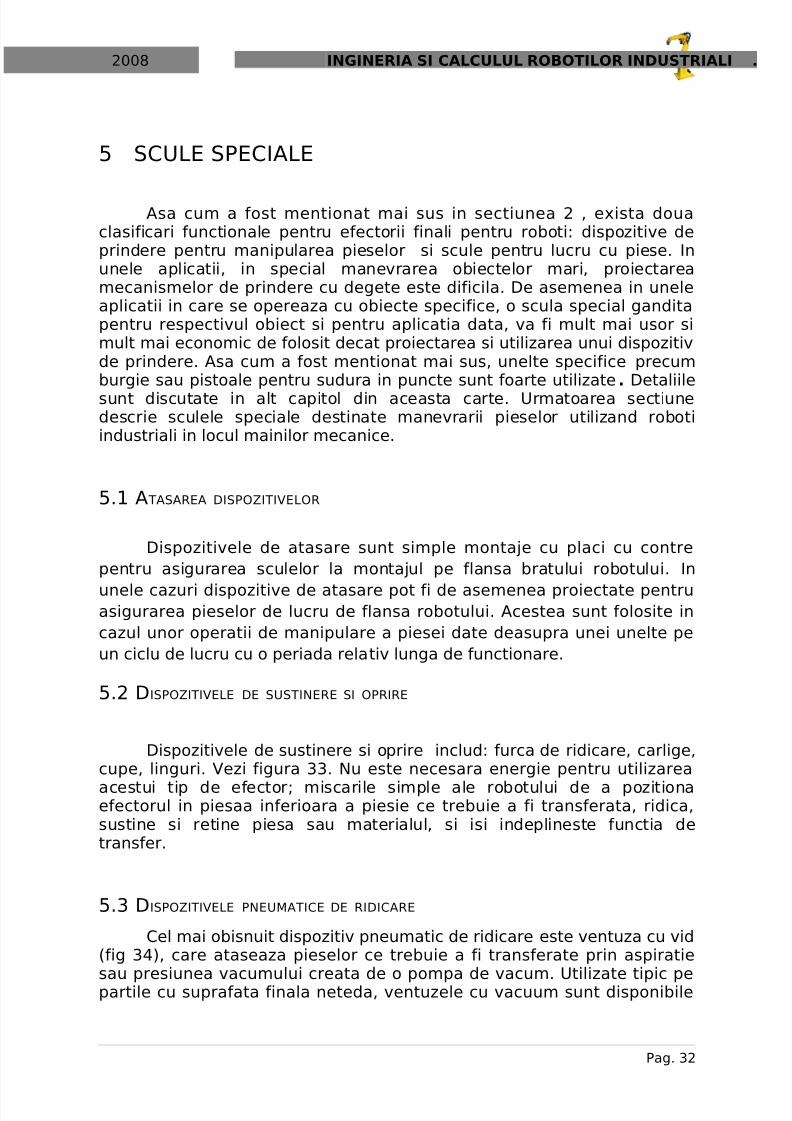
Motivul utilizarii mainii cu trei degete este capabilitatea ei deprindere a obiectului in trei puncte, care permit prinderea si tinereaobiectelor sferice de diferite marimi pastrand centrul obiectului in pozitiaspecificata .Mecanismele de strangere in trei puncte sunt tipice , utilizatepentru acest scop (vezi fig. 21). Miscarea fiecarui deget este executatautilizand un mecanism scripete-roata. Iesirea motorului electric estetransmisa scripetelui atasat angrenajului fiecarui deget strapuns oblicceea ce roteste scripetii. Cand fiecare scripete este rotit in sens orar sauantiorar, va fi produsa miscarea de translatie a fiecarui deget , rezultandmiscarea de prindere sau eliberare . Figura 22 arata o alta mana cu 3degete cu modul de prindere prin sistem de comutare. Aceasta include 4motoare electrice si 3 degete si pot avea patru feluri de prindere, asa cume aratat in fig.23, fiecare din ele poate fi indeplinit cu un mecanism degetrotitor. Toate degetele pot fi indoite de actionarea motorului prin legatura
cross-four-bar, si fiecare deget are un motor. Mecanismul deget de rotatieeste numit mecanism dubla-oprire, aratat in figura 24. Mecanismele cerotesc degetele sunt prezentate, iar sagetile dublu-sens indicat margineaplanului indoirii degetului pentru fiecare mod de strangere. Mecanismultransfera starea mainii progresiv la fiecare din cele 3 gheare pentru:infasurarea, desfacere si strangere. Angrenajele pentru degetele 2 si 3sunt conectate la angrenajul direct de actionare al motorului , in timp ceangrenajul degetului 1 este conectat la angrenajul de actionare almotorului prin intermediul unei cuple. Angrenajul actionat direct de motorin pozitia celor 2 gheare , roteste degetul 1 , trece prin intermediul pozitieide oprire, si atunci contorul de rotatie creste pozitia de infasurare. Similar,
degetul 1 este rotit in afara pozitiei de desfacere dar este returnat pemasura ce mecanismul trece in pozitia de prindere la varfuri. Degetul 2
Pag. 27
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 28/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
este rotit in sens antiorar cu 60° de la pozitia celor 3 gheare la pozitia deinfasurare, apoi in sens antiorar cu 120° in pozitia de desfasurare , apoi insens antiorar 150° in pozitia de stringere. Degetul 3 roteste prinintermediul unghiurilor indicate dar in directie antiorara. Un sistemmultistrangere de acest fel este pentru ridicare efectiva a obiectelor cuforme variate.
4.2.2. MANA CU CINCI DEGETE
Un numar mic de maini cu 5 degete au fost dezvoltate , cu putineintrebuintari industriale. Aproape toate sunt maini protezice pentruamputari. In dezvoltarea de brate protezice aspectul cosmetic este maiimportant .
Tabelul 1
Figura 21
Antropomorfismul este astfel necesar in proiectarea lor. Pentru uzindustrial , functia este mult mai importanta decat aspectul estetic, siantropomorfismul este dincolo de considerente. Acesta este motivulpentru care sunt cateva maini industriale cu 5 degete. Totusi, un ex. de
mana cu 5 degete dezvoltata pentru un protezic este descrisa mai josdeoarece multe maini includ mecanisme ce vor fi efectiv in proiectarea
Pag. 28
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 29/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
mainilor industriale. O persoana trebuie sa realizeze controlul semnalelorpentru operarea bratului protetic. Numarul semnalelor independentedisponibile determina cate grade de libertate poate sa aiba dispozitivulprostetic. Modele tipice de mana cu 5 degete pentru proteze au doar ungrad de libertate. Fiecare deget este conectat la un motor prin
mecanismele apropiate . Figura 25 prezinta un exemplu numit manaWIME (Kato,1969) . Fiecare deget este construit utilizand un mecanism delegatura de tipul cross-four-bar aceasta oferind degetului proprietatea deindoire a degetului. Un element al fiecarui set de 5 legatruri bara in cruceinclude un element cremaliera. Toate cremalierele sunt conectate la unarc incarcat plat 1, care care este miscat prin translatie de un motorelectric conducand mecanismul surub 2. Cand motorul se roteste orar sauantiorar placa 1 se misca favorabil la stanga sau la dreapta si activeazalegatura cross-four-bar fiecarui deget pentru indoirea degetului si produceoperatia de strangere. Pentru a asigura mana cu un echilibru de forte intredegete si obiect , aranjamentul degetelor trebuie sa fie atent avut invedere. Tipic mainilor cu 5 degete , fata de cadere a celorlalte 4 degetesunt plasate echidistant de la indicele de baza si mijlocul degetului atat laextremitatea degetului se poat intalni la un punct cand fiecare deget esteindoit . Daca conectarea fiecarui deget este rigida , miscarile degetuluisunt determinate de miscarea sistemului de actionare. Configuratiadegetului nu se poate acomoda schimbarilor de profil a obiectelor deprins. Pentru a remedia aceasta problema , iesirea motorului poate fitransmisa fiecarui deget prin intermediul elementelor flexibile.
4.2.3. MAINI MECANICE PENTRU APLICATII DE PRECIZIE
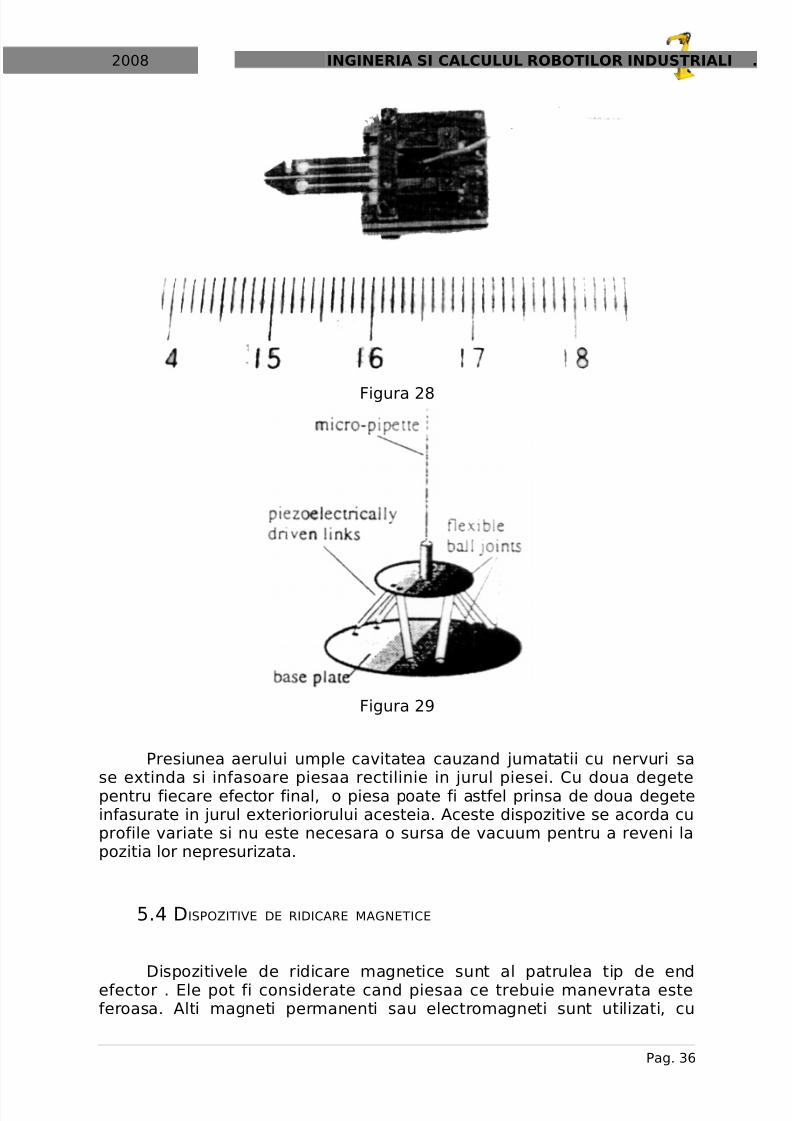
Pentru aplicatii ce necesita manipularea micro-obiectelor , asemenimicroasanblarii in microindustrie sau manipularea celulelor in bioindustrie,aceste maini pot manipula foarte precis obiectele necesare. Tehnologiaproducerii acestor maini a fost desenata cu multa atentie de la inceputulanilor 90. Cu avansul microelectronicii , tehnologiile producerii demicroobiecte au devenit populare . Diverse dispozitive de microprinderefoarte mici au fost dezvoltate. Acestea sunt discutate in capitolele 10 si11. Aceasta sectiune discuta dispozitivele de prindere., ele insasi putin
rezistente, pot manipula cu precizie obiecte foarte mici.Aici sunt cai diferite de proiectare de maini asemanatoare. O cale
foloseste o structura utilizand foaie de metal subtire. Vezi figura 27 si 28 .Pentru actuator , este utilizat un element de stiva piezoelectric. Esteinserat in centrul sectiunii de mana. Piezoelectricul se deformeaza candeste aplicat voltaj, si deformatia este transmisa structurii, compusa dindiferite brate si articulatii acestea sunt arc de legatura, cauzand miscareade prindere la capatul degetului. Miscarea de deschidere este cauzata deefectul arcului in structura cand tensiunea nu mai este aplicata . Laextremitatea de linga varf extensia este instalata pentru detectia fortei de
prindere . Este de asemenea utilizata sa compenseze histerezulpiezoelectricului actuatorului in general. Mana prezentata in figura 28
Pag. 29
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 30/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
poate prinde o greutate mai mica de 0.8 mm in diametru.Forta maxima deprindere este in jur de40 mN.
Un alt proiect eficient de dispozitiv de prindere de manevrare amicro-obiectelor utilizeaza un mecanism paralel. Bratul paralel , asemenibratului de tip platforma Stewart , produce un beneficiu functiilor depozitionare precisa la capatul degetelor, deoarece legaturile referitoare lamiscarea extremitatilor degetelor sunt aranjate in paralel, avand carezultat acea eroare de pozitionare la fiecare legatura nu va fi acumulatala extremitatea degetului.
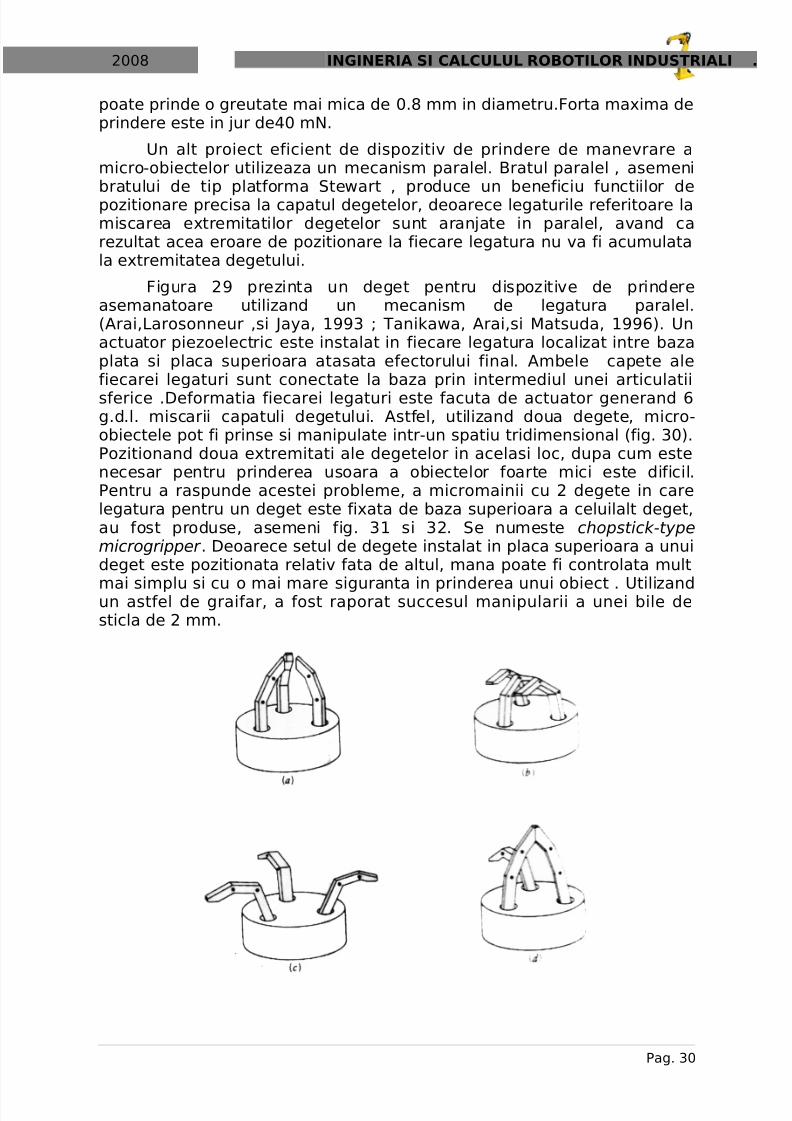
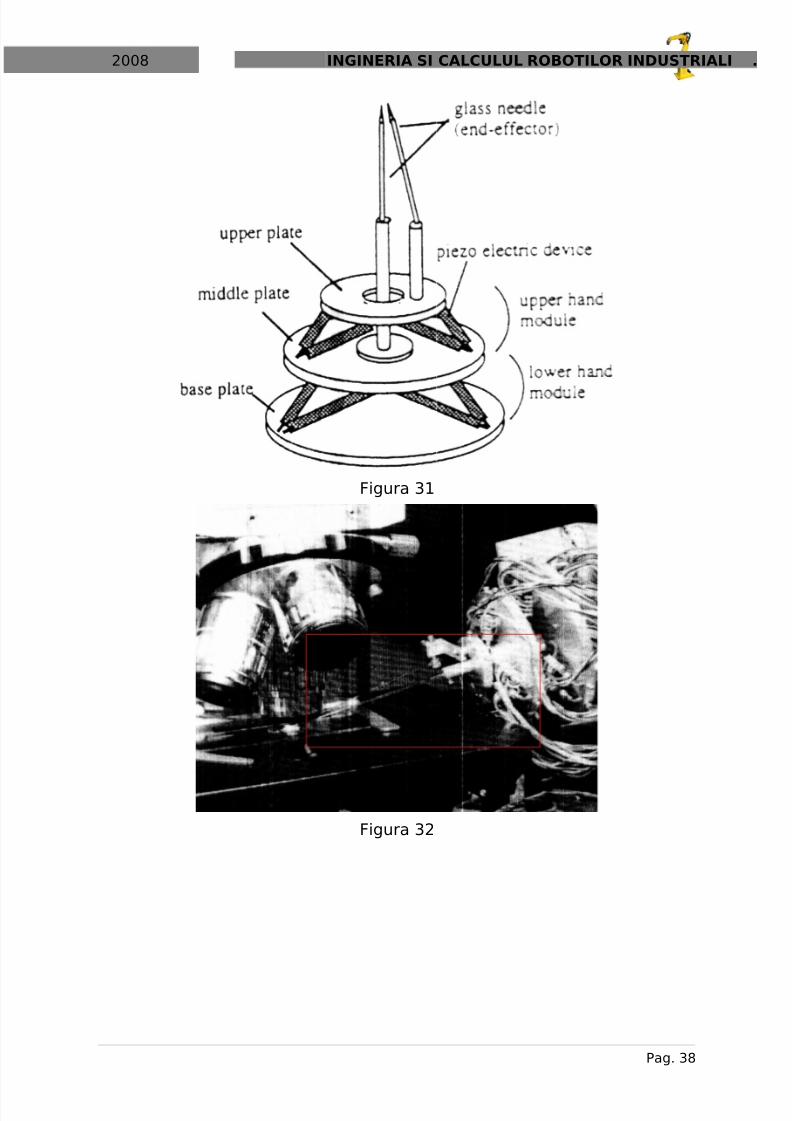
Figura 29 prezinta un deget pentru dispozitive de prindereasemanatoare utilizand un mecanism de legatura paralel.(Arai,Larosonneur ,si Jaya, 1993 ; Tanikawa, Arai,si Matsuda, 1996). Unactuator piezoelectric este instalat in fiecare legatura localizat intre bazaplata si placa superioara atasata efectorului final. Ambele capete alefiecarei legaturi sunt conectate la baza prin intermediul unei articulatiisferice .Deformatia fiecarei legaturi este facuta de actuator generand 6g.d.l. miscarii capatuli degetului. Astfel, utilizand doua degete, micro-obiectele pot fi prinse si manipulate intr-un spatiu tridimensional (fig. 30).Pozitionand doua extremitati ale degetelor in acelasi loc, dupa cum estenecesar pentru prinderea usoara a obiectelor foarte mici este dificil.Pentru a raspunde acestei probleme, a micromainii cu 2 degete in carelegatura pentru un deget este fixata de baza superioara a celuilalt deget,au fost produse, asemeni fig. 31 si 32. Se numeste chopstick-typemicrogripper . Deoarece setul de degete instalat in placa superioara a unuideget este pozitionata relativ fata de altul, mana poate fi controlata mult
mai simplu si cu o mai mare siguranta in prinderea unui obiect . Utilizandun astfel de graifar, a fost raporat succesul manipularii a unei bile desticla de 2 mm.
Pag. 30
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 31/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 2x
Pag. 31
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 32/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
5 SCULE SPECIALE
Asa cum a fost mentionat mai sus in sectiunea 2 , exista douaclasificari functionale pentru efectorii finali pentru roboti: dispozitive deprindere pentru manipularea pieselor si scule pentru lucru cu piese. Inunele aplicatii, in special manevrarea obiectelor mari, proiectareamecanismelor de prindere cu degete este dificila. De asemenea in uneleaplicatii in care se opereaza cu obiecte specifice, o scula special ganditapentru respectivul obiect si pentru aplicatia data, va fi mult mai usor simult mai economic de folosit decat proiectarea si utilizarea unui dispozitivde prindere. Asa cum a fost mentionat mai sus, unelte specifice precumburgie sau pistoale pentru sudura in puncte sunt foarte utilizate. Detaliilesunt discutate in alt capitol din aceasta carte. Urmatoarea sectiunedescrie sculele speciale destinate manevrarii pieselor utilizand robotiindustriali in locul mainilor mecanice.
5.1 A TASAREA DISPOZITIVELOR
Dispozitivele de atasare sunt simple montaje cu placi cu contre
pentru asigurarea sculelor la montajul pe flansa bratului robotului. In
unele cazuri dispozitive de atasare pot fi de asemenea proiectate pentruasigurarea pieselor de lucru de flansa robotului. Acestea sunt folosite incazul unor operatii de manipulare a piesei date deasupra unei unelte peun ciclu de lucru cu o periada relativ lunga de functionare.
5.2 DISPOZITIVELE DE SUSTINERE SI OPRIRE
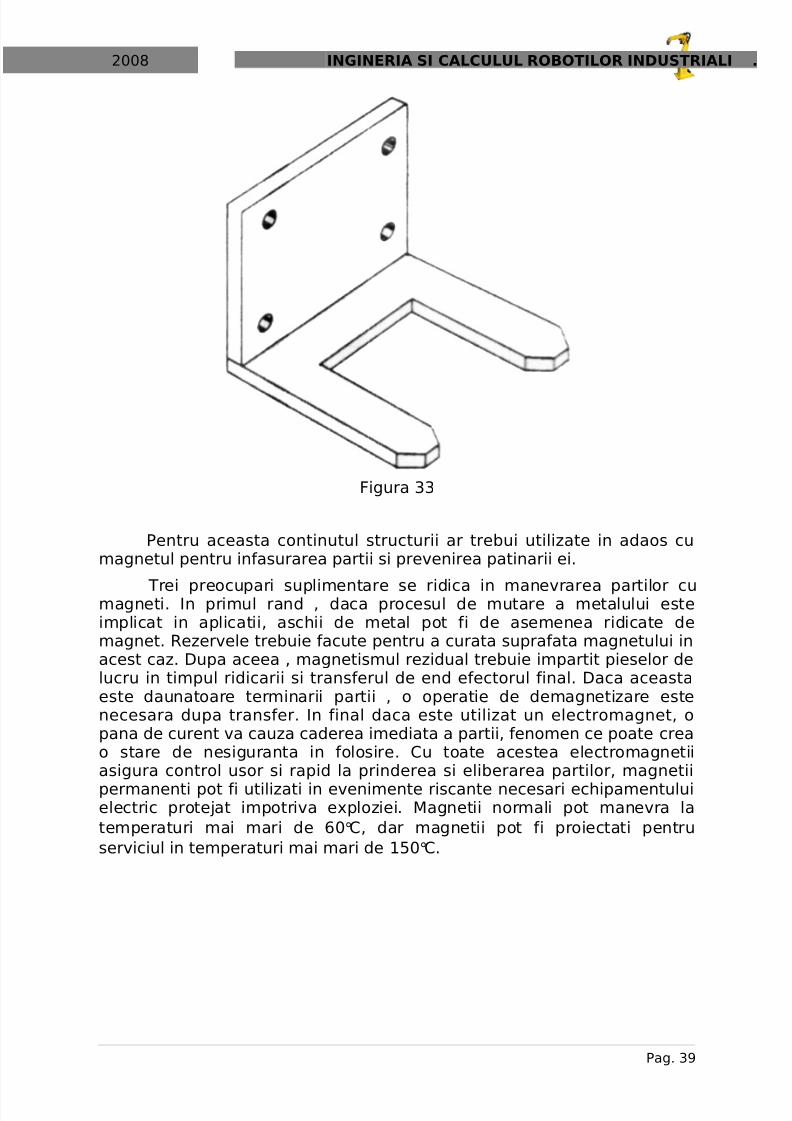
Dispozitivele de sustinere si oprire includ: furca de ridicare, carlige,cupe, linguri. Vezi figura 33. Nu este necesara energie pentru utilizarea
acestui tip de efector; miscarile simple ale robotului de a pozitionaefectorul in piesaa inferioara a piesie ce trebuie a fi transferata, ridica,sustine si retine piesa sau materialul, si isi indeplineste functia detransfer.
5.3 DISPOZITIVELE PNEUMATICE DE RIDICARE
Cel mai obisnuit dispozitiv pneumatic de ridicare este ventuza cu vid(fig 34), care ataseaza pieselor ce trebuie a fi transferate prin aspiratie
sau presiunea vacumului creata de o pompa de vacum. Utilizate tipic pepartile cu suprafata finala neteda, ventuzele cu vacuum sunt disponibile
Pag. 32
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 33/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
intr-o mare varietete de marimi, forme si materiale. Piesele cu suprafetenefinisate, pot fi ridicate de un sistem de vacuum daca se adauga un inelde cauciuc poros pe suprafata ventuzei de vacuum in zona de contact cupiesa. Inelul adera pe suprafata piesei si creeaza inchiderea etansanecesara pentru transferul cu vacuum. Traductorul difuzorului de vacuum,
care este relativ ieftin, este utilizat pentru manevre mici, piese usoare,unde este necesar un debit mic de vacuum. Pompele de vacuum , caresunt silentioase si foarte scumpe, genereaza un debit bun de vacuum sipot fi utilizate la manevrarea partilor mai grele.
Figura 24
Cu orice sistem de vacuum , calitatea suprafetei finale a partilor cetrebuie manevrate este importamta.Daca partile sunt cu ulei sau ude , vor
avea tendinta sa alunece de pe ventuzele de vacuum. Pentru aceastacateva tipuri aditionale de structuri de tinere ar trebui utilizate pentru a
Pag. 33
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 34/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
cuprinde piesaa si prevenirea alunecarii din ventuzele de vacuum. Inunele aplicatii se pot utiliza si ventuzele cu vacuum fara sursa degenerare. Presand ventuza pe piesa si evacuand aerul dintre ventuza sipiesa creand o tragere capabila sa ridice piesaa. Oricum, un dispozitiv destripare sau valve este necesar pentru separarea partii de ventuza in
timpul eliberarii. Cand este utilizat un difuzor de aer sau o pompa , trebuieutilizata o evacuare pentru separarea partii de ventuze. Ventuzele devacuum au temperatura limitata si nu pot fi utilizate pentru ridicarearelativa a partilor calde.
Figura 25
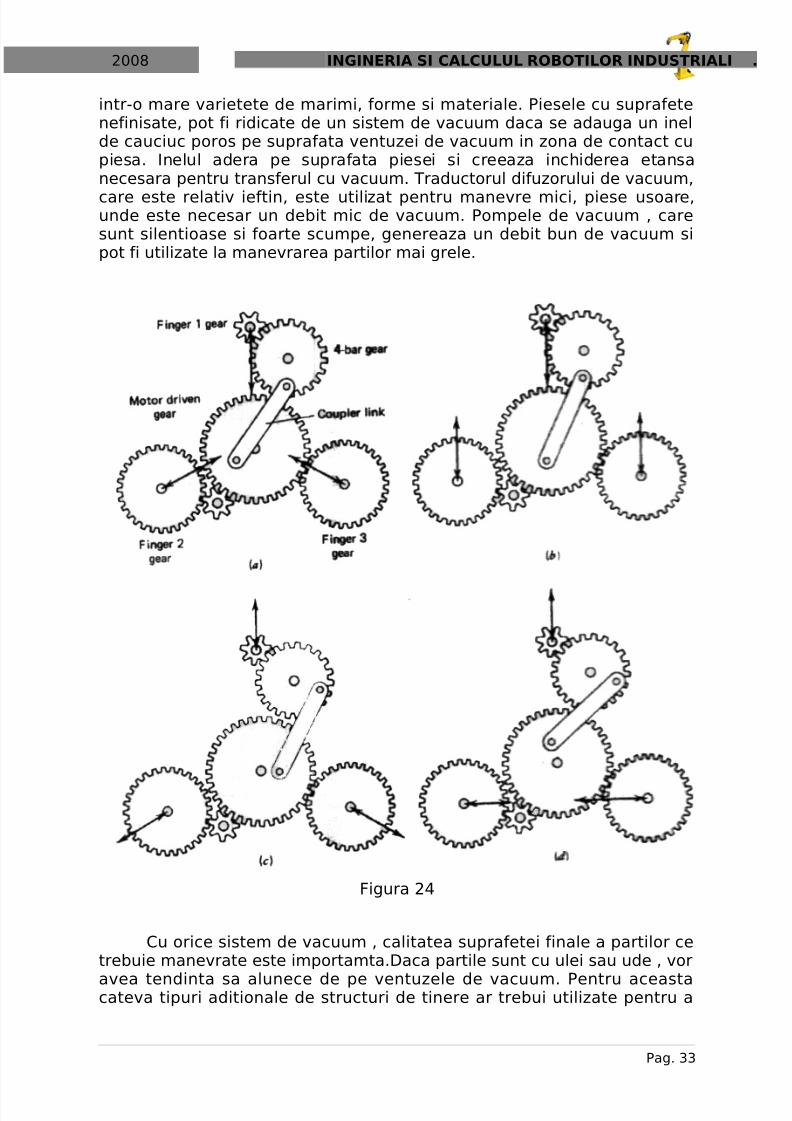
Un alt exemplu de dispozitiv de ridicare pneumatic este un balonpresurizat, care este proiectat in general conform profilului partii.
Pag. 34
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 35/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 26
Figura27
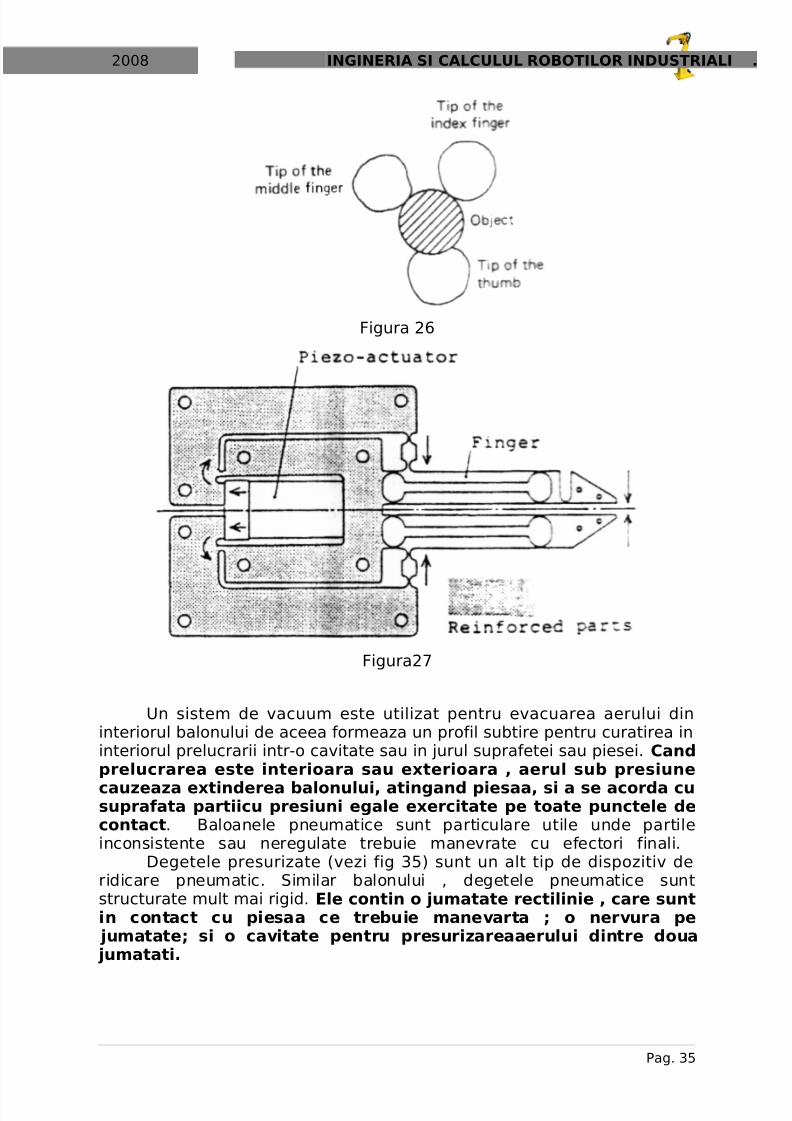
Un sistem de vacuum este utilizat pentru evacuarea aerului dininteriorul balonului de aceea formeaza un profil subtire pentru curatirea ininteriorul prelucrarii intr-o cavitate sau in jurul suprafetei sau piesei. Candprelucrarea este interioara sau exterioara , aerul sub presiune
cauzeaza extinderea balonului, atingand piesaa, si a se acorda cusuprafata partiicu presiuni egale exercitate pe toate punctele decontact. Baloanele pneumatice sunt particulare utile unde partileinconsistente sau neregulate trebuie manevrate cu efectori finali.
Degetele presurizate (vezi fig 35) sunt un alt tip de dispozitiv deridicare pneumatic. Similar balonului , degetele pneumatice suntstructurate mult mai rigid. Ele contin o jumatate rectilinie , care suntin contact cu piesaa ce trebuie manevarta ; o nervura pe
jumatate; si o cavitate pentru presurizareaaerului dintre doua jumatati.
Pag. 35
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 36/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 28
Figura 29
Presiunea aerului umple cavitatea cauzand jumatatii cu nervuri sa
se extinda si infasoare piesaa rectilinie in jurul piesei. Cu doua degetepentru fiecare efector final, o piesa poate fi astfel prinsa de doua degeteinfasurate in jurul exterioriorului acesteia. Aceste dispozitive se acorda cuprofile variate si nu este necesara o sursa de vacuum pentru a reveni lapozitia lor nepresurizata.
5.4 DISPOZITIVE DE RIDICARE MAGNETICE
Dispozitivele de ridicare magnetice sunt al patrulea tip de endefector . Ele pot fi considerate cand piesaa ce trebuie manevrata esteferoasa. Alti magneti permanenti sau electromagneti sunt utilizati, cu
Pag. 36
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 37/67
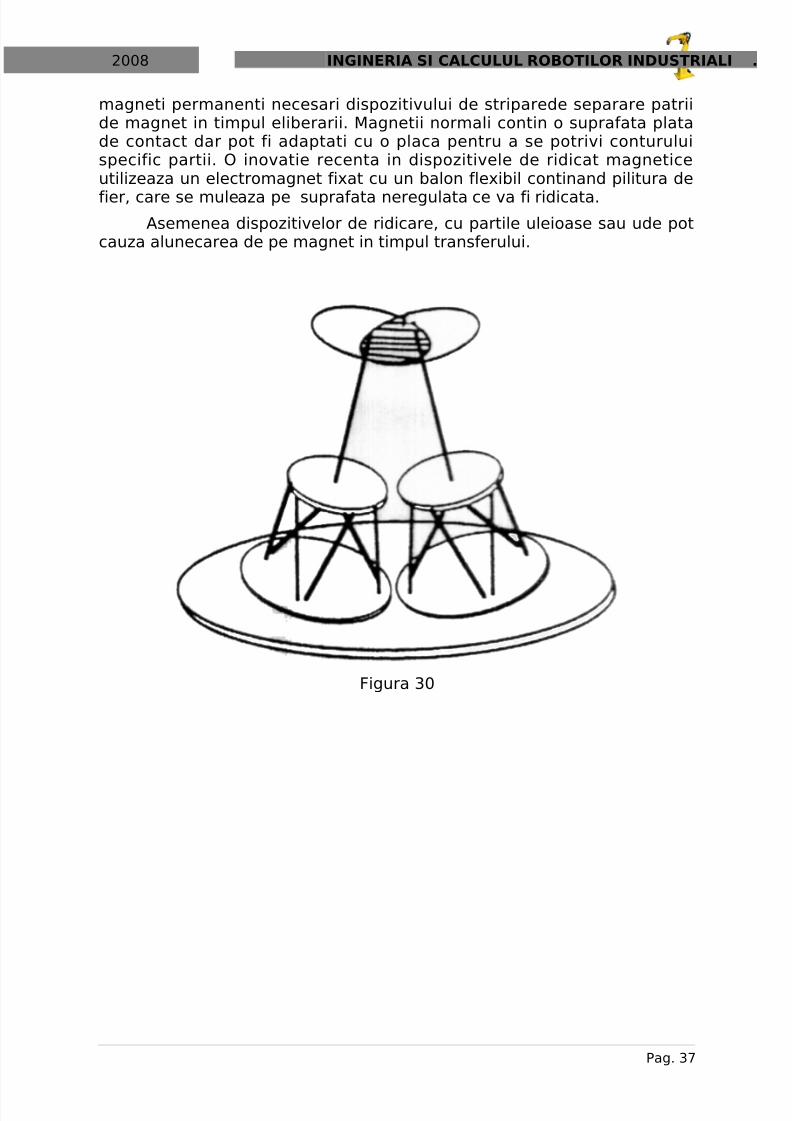
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
magneti permanenti necesari dispozitivului de striparede separare patriide magnet in timpul eliberarii. Magnetii normali contin o suprafata platade contact dar pot fi adaptati cu o placa pentru a se potrivi conturuluispecific partii. O inovatie recenta in dispozitivele de ridicat magneticeutilizeaza un electromagnet fixat cu un balon flexibil continand pilitura de
fier, care se muleaza pe suprafata neregulata ce va fi ridicata.Asemenea dispozitivelor de ridicare, cu partile uleioase sau ude pot
cauza alunecarea de pe magnet in timpul transferului.
Figura 30
Pag. 37
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 38/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 31
Figura 32
Pag. 38
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 39/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 33
Pentru aceasta continutul structurii ar trebui utilizate in adaos cumagnetul pentru infasurarea partii si prevenirea patinarii ei.
Trei preocupari suplimentare se ridica in manevrarea partilor cumagneti. In primul rand , daca procesul de mutare a metalului esteimplicat in aplicatii, aschii de metal pot fi de asemenea ridicate demagnet. Rezervele trebuie facute pentru a curata suprafata magnetului inacest caz. Dupa aceea , magnetismul rezidual trebuie impartit pieselor delucru in timpul ridicarii si transferul de end efectorul final. Daca aceastaeste daunatoare terminarii partii , o operatie de demagnetizare estenecesara dupa transfer. In final daca este utilizat un electromagnet, opana de curent va cauza caderea imediata a partii, fenomen ce poate creao stare de nesiguranta in folosire. Cu toate acestea electromagnetiiasigura control usor si rapid la prinderea si eliberarea partilor, magnetiipermanenti pot fi utilizati in evenimente riscante necesari echipamentuluielectric protejat impotriva exploziei. Magnetii normali pot manevra latemperaturi mai mari de 60°C, dar magnetii pot fi proiectati pentruserviciul in temperaturi mai mari de 150°C.
Pag. 39
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 40/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
6 MAINI UNIVERSALE
6.1. PROIECTAREA MAINILOR UNIVERSALE
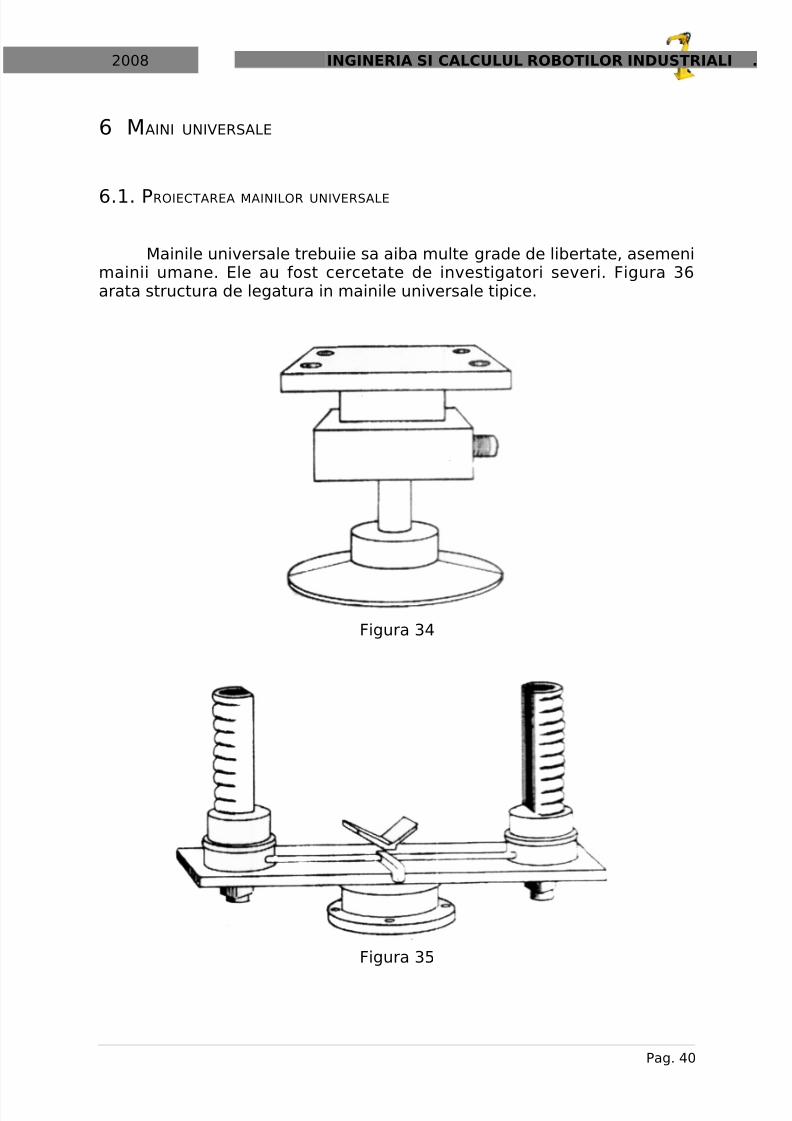
Mainile universale trebuiie sa aiba multe grade de libertate, asemenimainii umane. Ele au fost cercetate de investigatori severi. Figura 36arata structura de legatura in mainile universale tipice.
Figura 34
Figura 35
Pag. 40
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 41/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Exemplul utilizeaza 4 grade de libertate , dar de cele mai multe oridoar 3 grade de libertate sunt utilizate. In astfel de variante constructivepentru degete cupla cea mai apropiata de varful lor va fi scoasa. Numaruldegetelor este 3 (de cele mai multe ori) sau 4, rigiditatea si mecanismeleacestora furnizeaza suficiente functii pentru mainile universale.
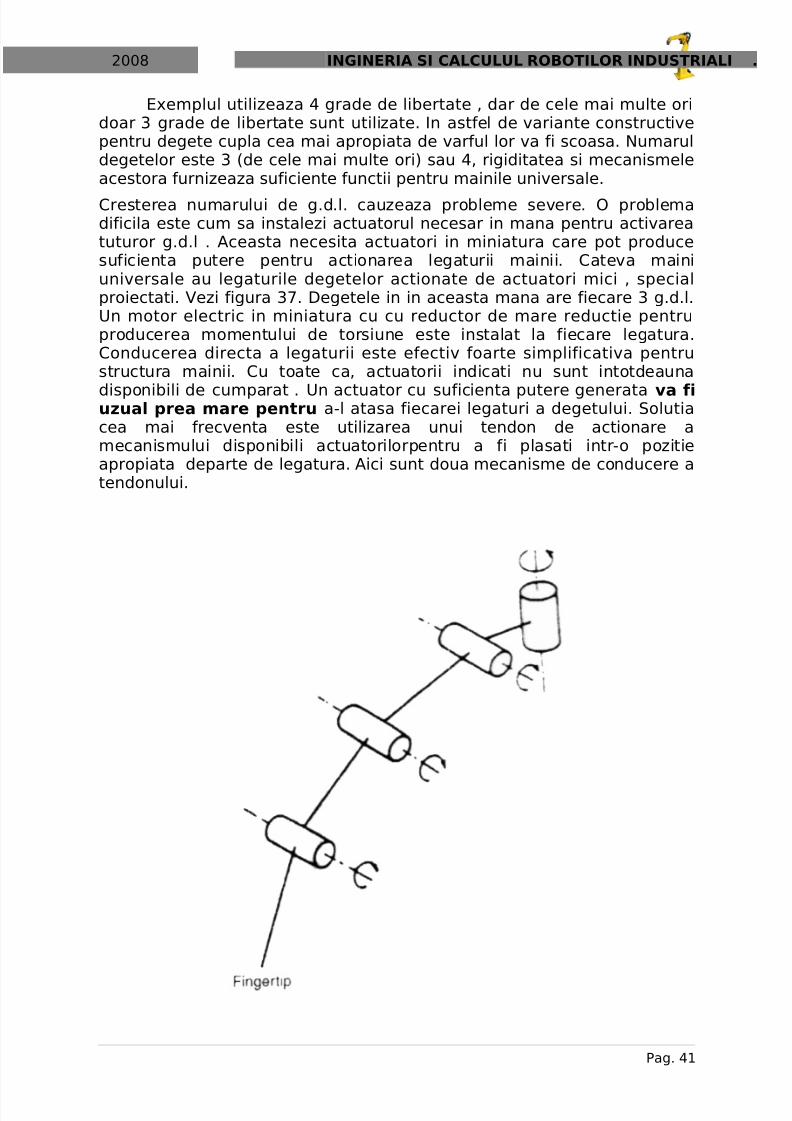
Cresterea numarului de g.d.l. cauzeaza probleme severe. O problemadificila este cum sa instalezi actuatorul necesar in mana pentru activareatuturor g.d.l . Aceasta necesita actuatori in miniatura care pot producesuficienta putere pentru actionarea legaturii mainii. Cateva mainiuniversale au legaturile degetelor actionate de actuatori mici , specialproiectati. Vezi figura 37. Degetele in in aceasta mana are fiecare 3 g.d.l.Un motor electric in miniatura cu cu reductor de mare reductie pentruproducerea momentului de torsiune este instalat la fiecare legatura.Conducerea directa a legaturii este efectiv foarte simplificativa pentrustructura mainii. Cu toate ca, actuatorii indicati nu sunt intotdeauna
disponibili de cumparat . Un actuator cu suficienta putere generata va fiuzual prea mare pentru a-l atasa fiecarei legaturi a degetului. Solutiacea mai frecventa este utilizarea unui tendon de actionare amecanismului disponibili actuatorilorpentru a fi plasati intr-o pozitieapropiata departe de legatura. Aici sunt doua mecanisme de conducere atendonului.
Pag. 41

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 42/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 36
Figura 37
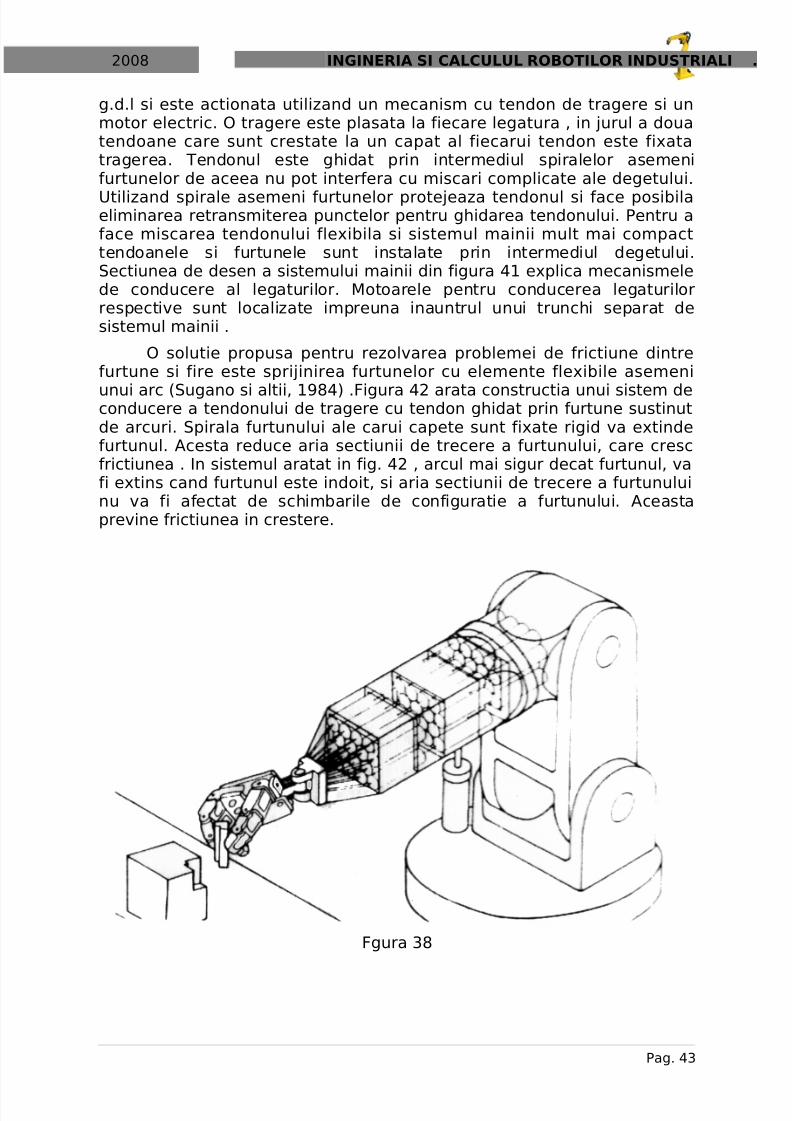
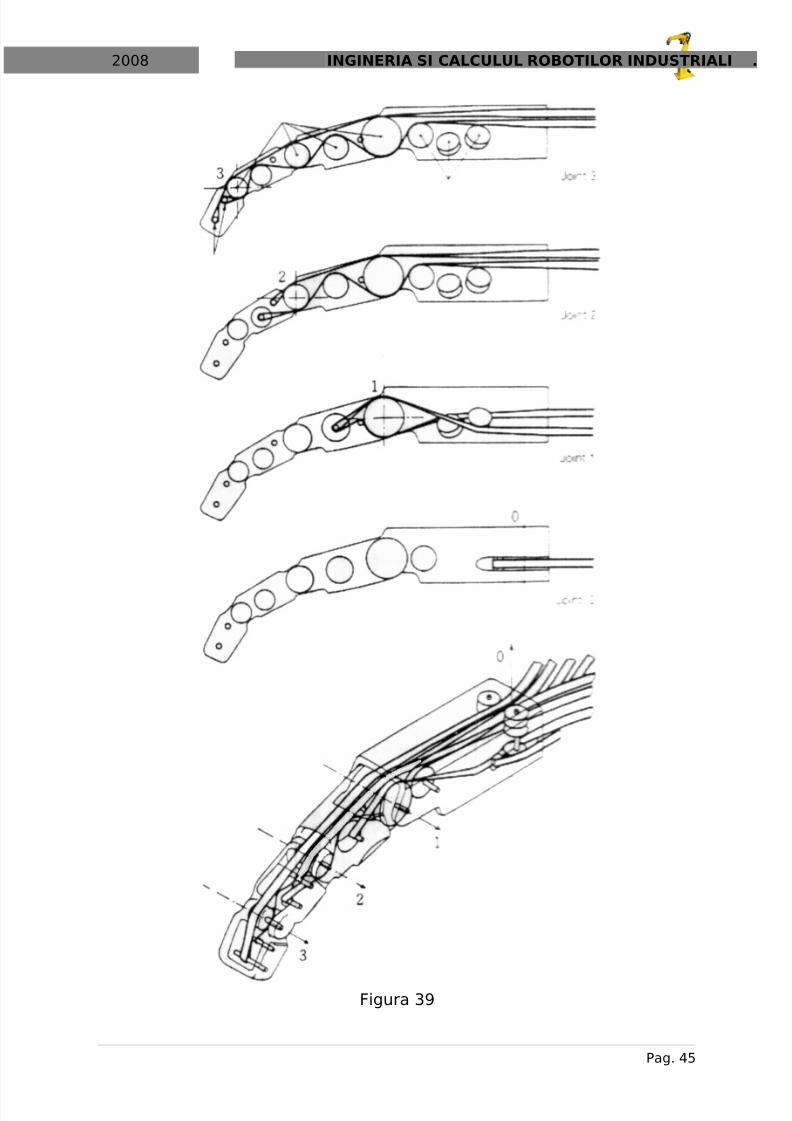
Una utilizeaza mecanisme de tragere a tendonului. Figura 38 aratamana Utah/MIT, care are 4 degete (Jacobsen et al..1981). Mecanismele detragere a tendonului sunt prezentate in figura 39. Un capat al tendonuluieste fixat la o balama localizata pe segmentul de deget ce se misca. Unalt capat este conectat la un actuator pneumatic. Intre capete, tendonuleste ghidat separat prin intermediul dispozitivului de tragere care poate firotit pasiv de miscarea tendonului. Doua tendoane, atletic si antagonistsunt utilizate pentru conducerea fiecarei legaturi. Un senzor de tensiune altendonului este atasat fiecarui actuator pentru controlul tensiunii dintendon si interactiunea dintre tendoane. Acest senzor este utilizat pentrucontrolul tensiunii tendonului si la interactiunea dintre tendoane (Jacobsen
et al..1981).Un alt mecanism de conducere prin tendon utilizeaza ocombinatie de trageri si furtune de ghidare a tendoanelor. Acestmecanism are avantajul de reducere al complexitatii mecanismelor deghidare. Neajunsul este ca frecarea este in crestere in sistemul detransmitere a puterii. Figura 40 arata o mana utilizand acest mecanism deconducere .Mana are trei degete: degetul mare , deget aratator si degetmijlociu (Okada,1982). Fiecare deget contine doua sau trei segmentecilindrice de 17 mm facute din garnituri de alama tubulare. Tipul fiecaruisegment este taiat la un unghi de 30° de aceea degetul poate fi indoit laun unghi de maximum 45°la fiecare legatura in ambele directii in interiorsi in exterior. Spatiul de lucru al degetului astfel conceput este mai marein comparatie cu al unui deget uman. Degetul mare are trei legaturi, iardegetul aratator si cel mijlociu au fiecare 4 legaturi. Fiecare legatura are 4
Pag. 42
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 43/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
g.d.l si este actionata utilizand un mecanism cu tendon de tragere si unmotor electric. O tragere este plasata la fiecare legatura , in jurul a douatendoane care sunt crestate la un capat al fiecarui tendon este fixatatragerea. Tendonul este ghidat prin intermediul spiralelor asemenifurtunelor de aceea nu pot interfera cu miscari complicate ale degetului.
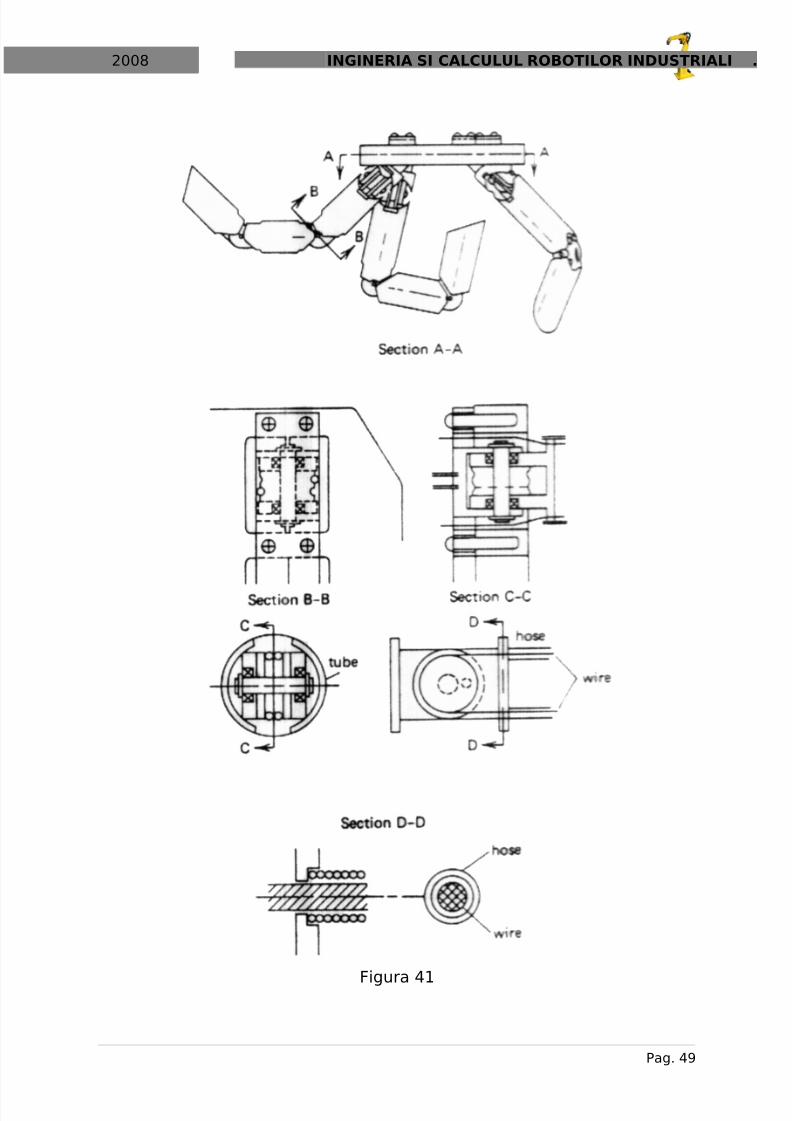
Utilizand spirale asemeni furtunelor protejeaza tendonul si face posibilaeliminarea retransmiterea punctelor pentru ghidarea tendonului. Pentru aface miscarea tendonului flexibila si sistemul mainii mult mai compacttendoanele si furtunele sunt instalate prin intermediul degetului.Sectiunea de desen a sistemului mainii din figura 41 explica mecanismelede conducere al legaturilor. Motoarele pentru conducerea legaturilorrespective sunt localizate impreuna inauntrul unui trunchi separat desistemul mainii .
O solutie propusa pentru rezolvarea problemei de frictiune dintrefurtune si fire este sprijinirea furtunelor cu elemente flexibile asemeni
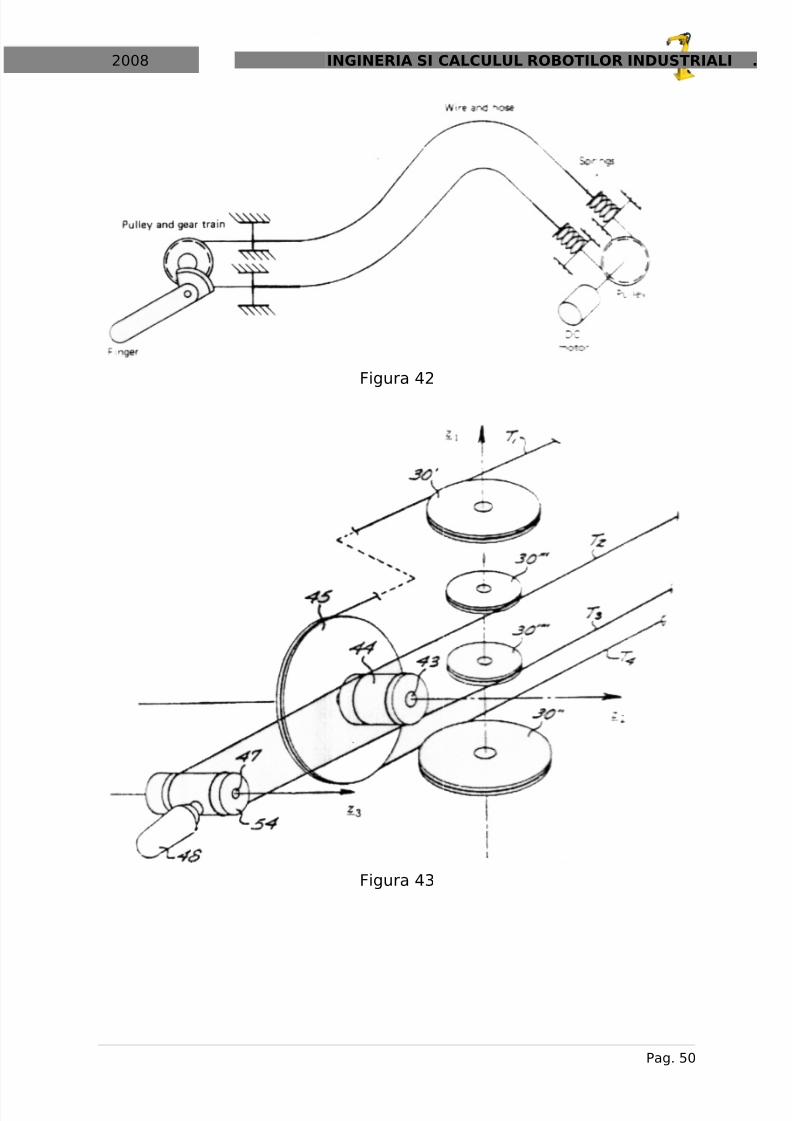
unui arc (Sugano si altii, 1984) .Figura 42 arata constructia unui sistem deconducere a tendonului de tragere cu tendon ghidat prin furtune sustinutde arcuri. Spirala furtunului ale carui capete sunt fixate rigid va extindefurtunul. Acesta reduce aria sectiunii de trecere a furtunului, care crescfrictiunea . In sistemul aratat in fig. 42 , arcul mai sigur decat furtunul, vafi extins cand furtunul este indoit, si aria sectiunii de trecere a furtunuluinu va fi afectat de schimbarile de configuratie a furtunului. Aceastaprevine frictiunea in crestere.
Fgura 38
Pag. 43

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 44/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
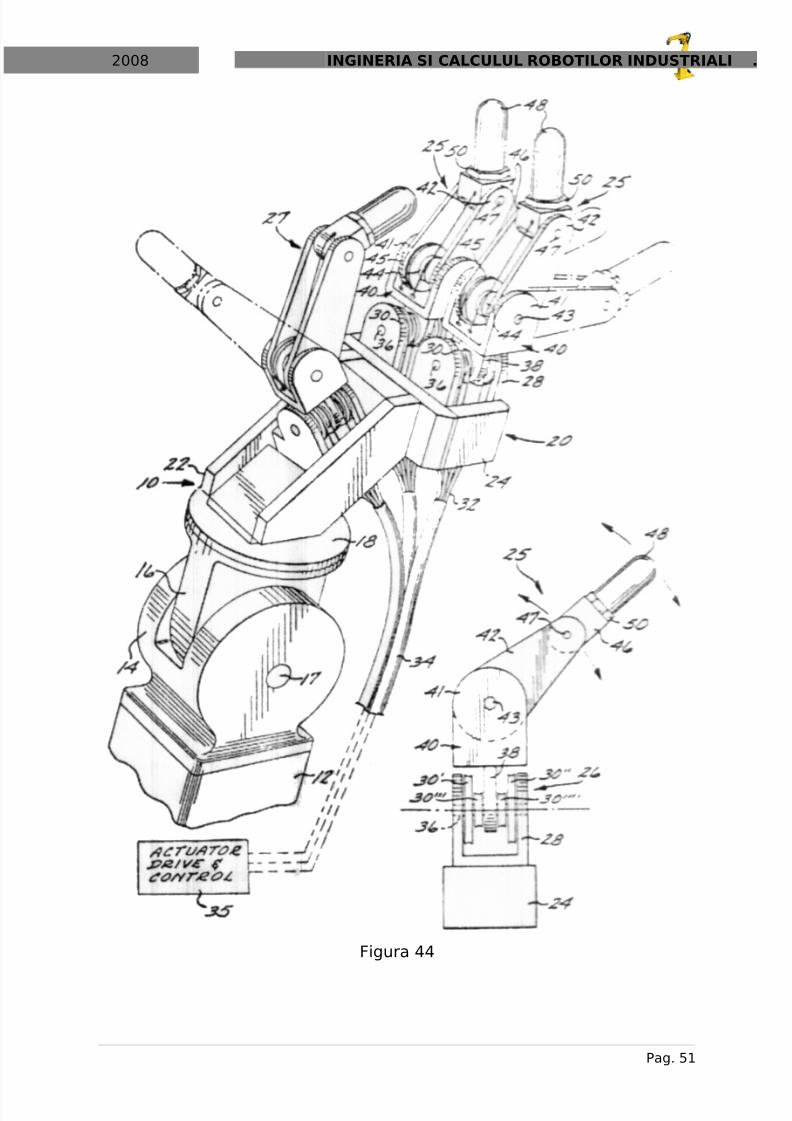
O alta problema cu metoda de conducere a tendonului estecontrolul tensiunii potrivite a acestuia in timpul miscarii. Controlultensiunii utilizand senzori este folosit pentru evitarea relaxarii tendonului.Mecanismele de conducere cuplate tendonului sunt de asemenea reale.Aceste mecanisme utilizeaza o legatura a tendoanelor, fiecare dintre ele
deranjeaja pe altele. Figura 43 arata un asemenea sistem de conducerepentru un deget cu trei legaturi. Exploatarea mainii , Standford/JPL Hand(Fig. 44) (Manson si Salisbury, 1985), utilizeaza 4 tendoane si motoareelectrice pentru actionarea a 3 legaturi. Fiecare motor este instalat in asafel incat sa se opuna altora prin intermediul tendoanelor. Tensiuneatendonului poate fi controlata in asa fel, controland fiecare motorcooperativ. Aceasta
Pag. 44
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 45/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 39
Pag. 45
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 46/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
structura sporeste complexitatea controlului, dar este utila pentrucontrolul tensiunii din tendon.
6.2. CONTROLUL MAINILOR UNIVERSALE
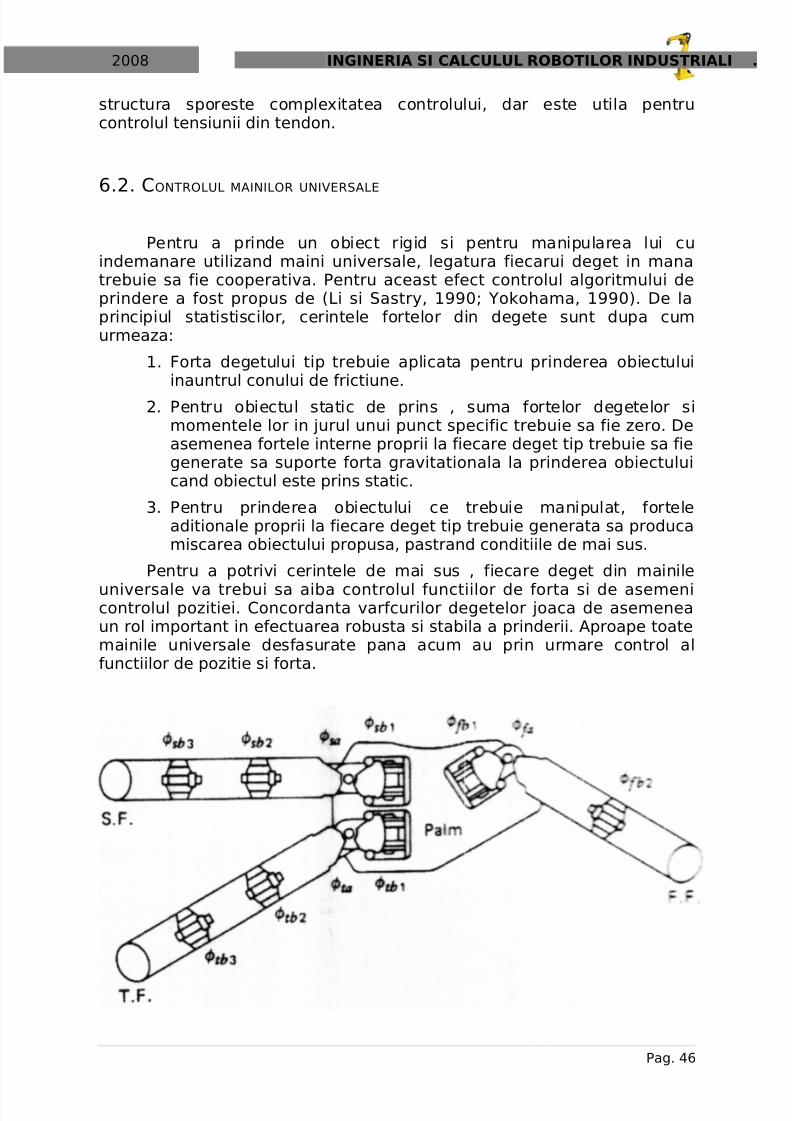
Pentru a prinde un obiect rigid si pentru manipularea lui cuindemanare utilizand maini universale, legatura fiecarui deget in manatrebuie sa fie cooperativa. Pentru aceast efect controlul algoritmului deprindere a fost propus de (Li si Sastry, 1990; Yokohama, 1990). De laprincipiul statistiscilor, cerintele fortelor din degete sunt dupa cumurmeaza:
1. Forta degetului tip trebuie aplicata pentru prinderea obiectuluiinauntrul conului de frictiune.
2. Pentru obiectul static de prins , suma fortelor degetelor simomentele lor in jurul unui punct specific trebuie sa fie zero. Deasemenea fortele interne proprii la fiecare deget tip trebuie sa fiegenerate sa suporte forta gravitationala la prinderea obiectuluicand obiectul este prins static.
3. Pentru prinderea obiectului ce trebuie manipulat, forteleaditionale proprii la fiecare deget tip trebuie generata sa producamiscarea obiectului propusa, pastrand conditiile de mai sus.
Pentru a potrivi cerintele de mai sus , fiecare deget din mainile
universale va trebui sa aiba controlul functiilor de forta si de asemenicontrolul pozitiei. Concordanta varfcurilor degetelor joaca de asemeneaun rol important in efectuarea robusta si stabila a prinderii. Aproape toatemainile universale desfasurate pana acum au prin urmare control alfunctiilor de pozitie si forta.
Pag. 46

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 47/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 40
Oamenii pot face lucruri complexe si variate folosind cu indemanaremiscarea degetelor. Uneori ei vor manipula obiectul utilizand miscarea de
prindere prin alunecare pe suprafata degetului. Pentru ca o manauniversala sa poata executa operatii calificate, trebuie satisfacutenecesitati mult mai complexe – care se adauga listei de mai sus. Pentrumainile universale controlul indemanarii trebuie realizat, gasind locul deprindere, controlul fortelor care se adapteaza si asa mai departe. Pentrudetalii despre prindere si manipulare utilizand controlul mainiloruniversale, vezi Murray, Li si Sastry (1994) si Maekawa, Tanie si Komoriya(1997).
Pag. 47
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 48/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
7. IMPLEMENTAREA PRACTICA A EFECTORILOR FINALILA ROBOTI
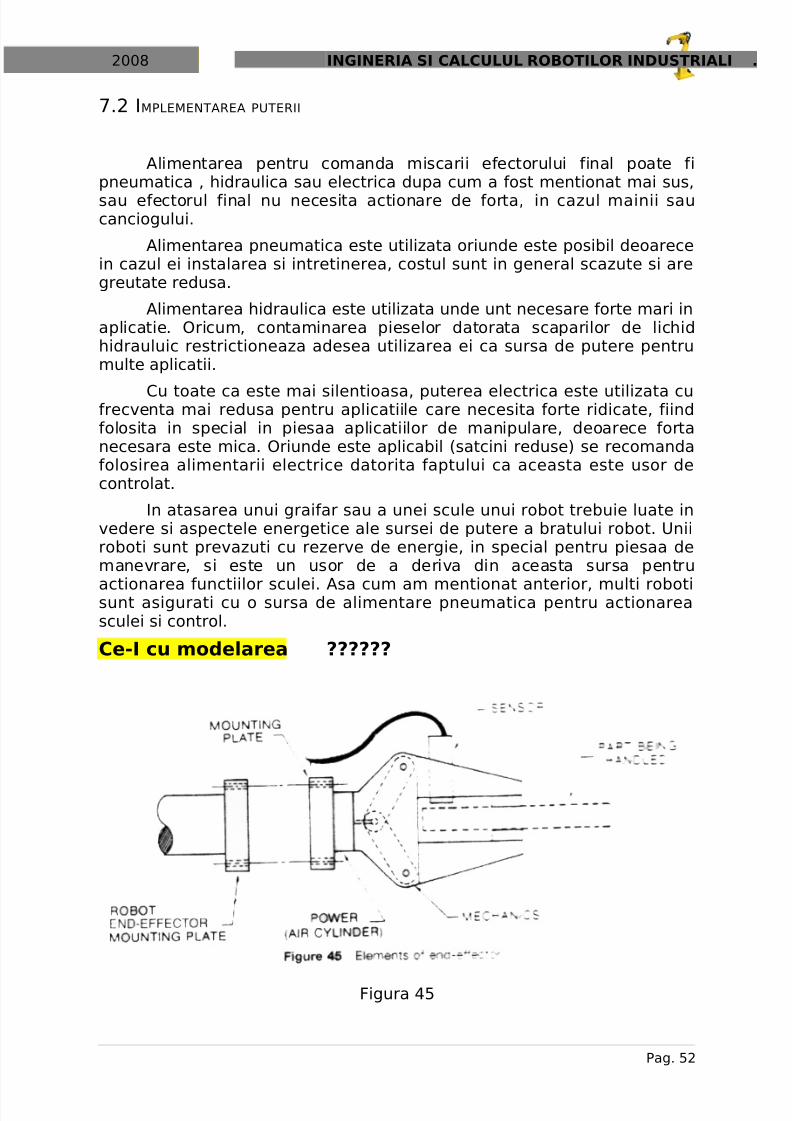
Efectorul final utilizat practic in industria robotilor este facut in modobisnuit din patru elemente distincte (vezi figura 45):
1. Dispozitivul de atasare a efectorului final sau a uneltei de flansarobotului
2. Puterea pentru actionarea miscarilor sculei efectorului final
3. Mecanica mecanismului cu articulatie
4. Senzorii integrati in efectorul final
Rolul elementului si cum se implementeaza circuitul de forta sisenzorii sunt abordati din punct de vedere practic in cele ce urmeaza.
7.1. MONTAJUL PLAT
Dispozitivele de atasare a efectorului final la un robot industrial suntfixate de flansa elementului final al robotului localizat la capatul ultimeiaxe de miscare pe bratul robotului. Acest montaj plat poate contine o altaimbinare sau gauri de evacuare pentru atasarea uneltelor sau a mainii.Pentru un montaj fix al mainii sau sculei, poate fi efectuat un adaptor platcu gauri, calibrand potrivirea pe flansa end efectorului. Elementele libereale adaptorului asigura suprafata de montaj pentru mana sau unelta data,la distanta si orientarea proprie fata de flansa electorului final de pe bratulrobotului. Daca aplicatia solicita robotului un schimb automat al mainilorsau sculelor, poate fi asigurat un dispozitiv de cuplare/decuplare. Un astfelde adaptor plat este atasat la fiecare mana sau unealta pentru ca ea sapoata fi utilizata, cu o pozitie de inchidere normala cu ajutoruldispozitivului de cuplare.
Dispozitivul de cuplare poate de asemenea sa contina sursa deputere pentru maini sau scule si conectarea automata a puterii inmomentul in care efectorul final este atasat. Figura 46, 47, si 48 ilustreazaaceasta conectare de putere in aplicatia de schimbare a unelteiefectorului final. O alta varianta la aceasta abordare este ca fiecare sculasa aiba propria linie de putere permanent conectata si robotul sa ridicediferitele scule montate pe adaptorul plat (acesta din urma avand punctecomune de inchidere cu flansa bratului robot).
Pag. 48
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 49/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 41
Pag. 49
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 50/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 42
Figura 43
Pag. 50
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 51/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 44
Pag. 51
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 52/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
7.2 IMPLEMENTAREA PUTERII
Alimentarea pentru comanda miscarii efectorului final poate fipneumatica , hidraulica sau electrica dupa cum a fost mentionat mai sus,
sau efectorul final nu necesita actionare de forta, in cazul mainii saucanciogului.
Alimentarea pneumatica este utilizata oriunde este posibil deoarecein cazul ei instalarea si intretinerea, costul sunt in general scazute si aregreutate redusa.
Alimentarea hidraulica este utilizata unde unt necesare forte mari inaplicatie. Oricum, contaminarea pieselor datorata scaparilor de lichidhidrauluic restrictioneaza adesea utilizarea ei ca sursa de putere pentrumulte aplicatii.
Cu toate ca este mai silentioasa, puterea electrica este utilizata cufrecventa mai redusa pentru aplicatiile care necesita forte ridicate, fiindfolosita in special in piesaa aplicatiilor de manipulare, deoarece fortanecesara este mica. Oriunde este aplicabil (satcini reduse) se recomandafolosirea alimentarii electrice datorita faptului ca aceasta este usor decontrolat.
In atasarea unui graifar sau a unei scule unui robot trebuie luate invedere si aspectele energetice ale sursei de putere a bratului robot. Uniiroboti sunt prevazuti cu rezerve de energie, in special pentru piesaa demanevrare, si este un usor de a deriva din aceasta sursa pentru
actionarea functiilor sculei. Asa cum am mentionat anterior, multi robotisunt asigurati cu o sursa de alimentare pneumatica pentru actionareasculei si control.
Ce-I cu modelarea ??????
Figura 45
Pag. 52

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 53/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
7.3 LEGATURILE MECANICE
Efectorii finali pentru roboti pot fi proiectati cu o cupla directa intreactionare si piesa de lucru, si in acest caz al unui cilindru de aer, acelemiscari de gurire inauntrul piesei de lucru, pot uza indirect cuplajele saulegaturile pentru a castiga avantaj mecanic, si in a cazul dispozitivului detip pivot apucator. O mana de tip apucare poate avea de asemena rezervepentru interschimbabilitatea degetelor in conformitate cu partile variateca configuratie si marime. In rasucire, degetele atasate mainii pot avearezerve pentru interschimbabilitatea insertiilor conform variatelorconfiguratii ale partii.
Figura 46
Pag. 53
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 54/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 47
Figura 48
7.4. SENZORI
Pag. 54

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 55/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Senzorii sunt incorporati in efectorii finali pentru detectareadiferitelor conditii. Din conditii de siguranta senzorii sunt proiectati normalin modelare la detectia pieselor de lucru sau retinerea sculei de robot intimpul operatiei robotului. Senzorii sunt de asemenea utilizati lamonitorizarea conditiilor piesei de lucru ori a sculei, cum ar fi de exemplu
montarea uni senzor pentru o operatie de gaurire pentru a detecta candtaisul burghiului este rupt sau uzat. Senzorii sunt de asemenea utilizatipentru a verificarea daca un proces este terminat satisfacator, asemeniurmaririi firului pentru alimentarea sudurii in arc si contorizarea curgerii incapetele de distributie. Mai recent robotii speciali proiectati pentruaplicatii de asamblare contin senzori de forta (tensometrici) si senzoritensometrici dimensionali in efectorul final.
Pag. 55
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 56/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
8. PROIECTUL PRACTIC PENTRU EFECTORII FINALI ALROBOTULUI
Aceasta sectiune explica mai intai criteriul general pentru proiectulefectorului final al robotului, incluzand importanta de analizare aobiectului ce trebuie manipulat sau prelucrat. Analizele se refera la fazade pre-inginerie si coloectare a datelor. Dezvoltarea conceptului deefector final si proiectul va inainta dupa ce analizele sunt complete. Adoua faza de preinginerie cuprinde analiza pieselor de lucru si aproceselor, cu accent pe considerente de productivitate. In a treia faza vorfi descrise cateva linii importante de ghidare pentru proiectarea efectorilorfinali.
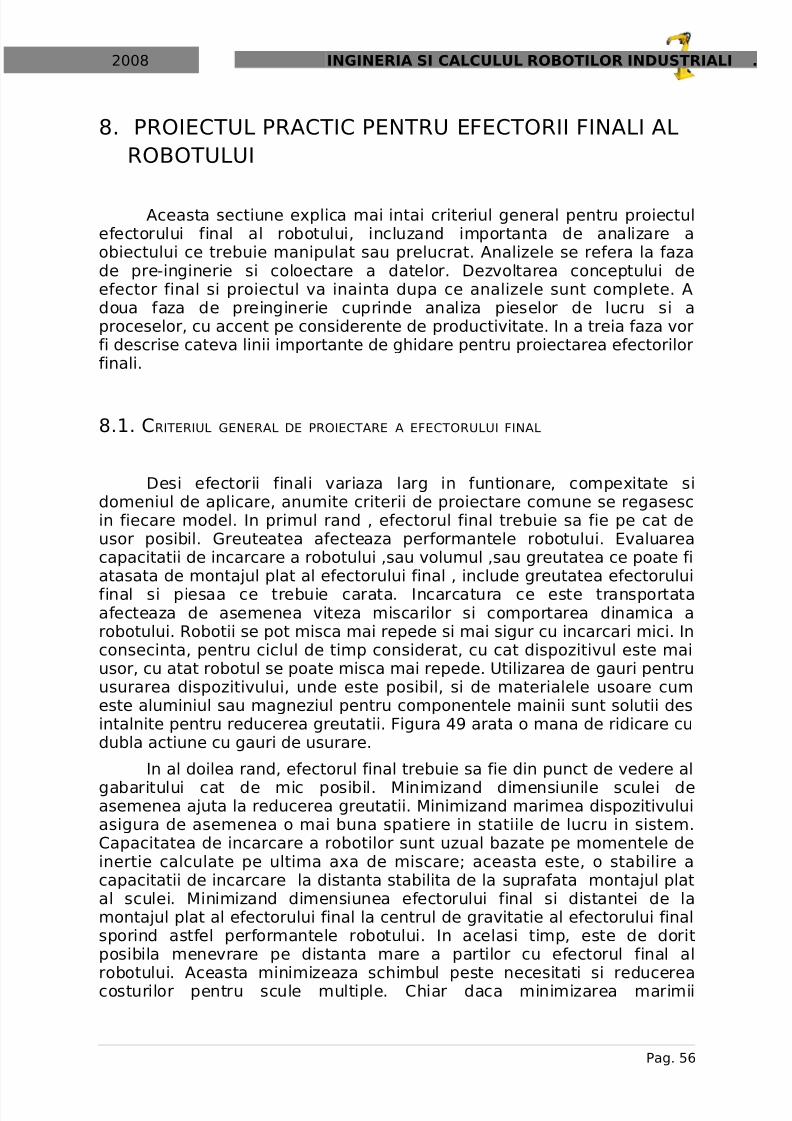
8.1. CRITERIUL GENERAL DE PROIECTARE A EFECTORULUI FINAL
Desi efectorii finali variaza larg in funtionare, compexitate sidomeniul de aplicare, anumite criterii de proiectare comune se regasescin fiecare model. In primul rand , efectorul final trebuie sa fie pe cat deusor posibil. Greuteatea afecteaza performantele robotului. Evaluareacapacitatii de incarcare a robotului ,sau volumul ,sau greutatea ce poate fiatasata de montajul plat al efectorului final , include greutatea efectoruluifinal si piesaa ce trebuie carata. Incarcatura ce este transportataafecteaza de asemenea viteza miscarilor si comportarea dinamica arobotului. Robotii se pot misca mai repede si mai sigur cu incarcari mici. Inconsecinta, pentru ciclul de timp considerat, cu cat dispozitivul este maiusor, cu atat robotul se poate misca mai repede. Utilizarea de gauri pentruusurarea dispozitivului, unde este posibil, si de materialele usoare cumeste aluminiul sau magneziul pentru componentele mainii sunt solutii desintalnite pentru reducerea greutatii. Figura 49 arata o mana de ridicare cudubla actiune cu gauri de usurare.
In al doilea rand, efectorul final trebuie sa fie din punct de vedere al
gabaritului cat de mic posibil. Minimizand dimensiunile sculei deasemenea ajuta la reducerea greutatii. Minimizand marimea dispozitivuluiasigura de asemenea o mai buna spatiere in statiile de lucru in sistem.Capacitatea de incarcare a robotilor sunt uzual bazate pe momentele deinertie calculate pe ultima axa de miscare; aceasta este, o stabilire acapacitatii de incarcare la distanta stabilita de la suprafata montajul platal sculei. Minimizand dimensiunea efectorului final si distantei de lamontajul plat al efectorului final la centrul de gravitatie al efectorului finalsporind astfel performantele robotului. In acelasi timp, este de doritposibila menevrare pe distanta mare a partilor cu efectorul final al
robotului. Aceasta minimizeaza schimbul peste necesitati si reducereacosturilor pentru scule multiple. Chiar daca minimizarea marimii
Pag. 56
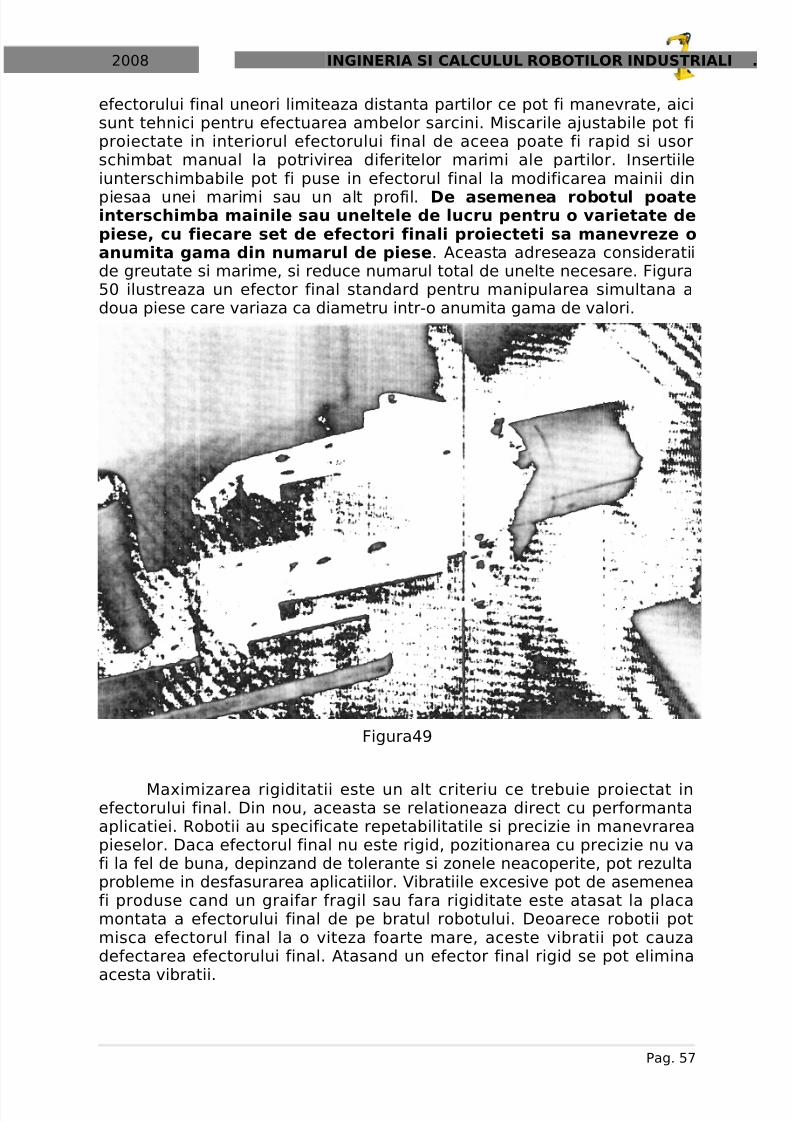
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 57/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
efectorului final uneori limiteaza distanta partilor ce pot fi manevrate, aicisunt tehnici pentru efectuarea ambelor sarcini. Miscarile ajustabile pot fiproiectate in interiorul efectorului final de aceea poate fi rapid si usorschimbat manual la potrivirea diferitelor marimi ale partilor. Insertiileiunterschimbabile pot fi puse in efectorul final la modificarea mainii din
piesaa unei marimi sau un alt profil. De asemenea robotul poateinterschimba mainile sau uneltele de lucru pentru o varietate depiese, cu fiecare set de efectori finali proiecteti sa manevreze oanumita gama din numarul de piese. Aceasta adreseaza consideratiide greutate si marime, si reduce numarul total de unelte necesare. Figura50 ilustreaza un efector final standard pentru manipularea simultana adoua piese care variaza ca diametru intr-o anumita gama de valori.
Figura49
Maximizarea rigiditatii este un alt criteriu ce trebuie proiectat inefectorului final. Din nou, aceasta se relationeaza direct cu performantaaplicatiei. Robotii au specificate repetabilitatile si precizie in manevrareapieselor. Daca efectorul final nu este rigid, pozitionarea cu precizie nu vafi la fel de buna, depinzand de tolerante si zonele neacoperite, pot rezultaprobleme in desfasurarea aplicatiilor. Vibratiile excesive pot de asemeneafi produse cand un graifar fragil sau fara rigiditate este atasat la placamontata a efectorului final de pe bratul robotului. Deoarece robotii potmisca efectorul final la o viteza foarte mare, aceste vibratii pot cauzadefectarea efectorului final. Atasand un efector final rigid se pot elimina
acesta vibratii.
Pag. 57
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 58/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Forta maxima aplicata la strangere trebuie luata in calcul pentruproiectarea efectorului final. Acesta este in mod special importanta dinmotive de siguranta. Robotii sunt masini dinamice care pot misca piese laviteza ridicate, doar cu forta degetelo si forta de frecare tinand piesele inmana. Deoarece robotii de obicei rotesc piesa in jurul bazei fixe a
robotului, sunt produse forte centrifugale. Fortele de acceleratie sideceleratie rezulta de asemenea la miscarile robotului de la un punct laaltul. Efectul acestor forte, actionand pe piesa fac critica proiectarea uneiforte aplicate stationar cu un factor de siguranta suficienta pentru aasigura retinerea in siguranta piesi in timpul transferului si a nu o sacapaasemeni unui proiectil, cu potential cauzand ranirea sau chiar moarteapersonalului din spatiul de lucru sau distrugerea echipamentului periferic.In alta mana, forta statica aplicata nu trebuie sa fie atat de mare cauzandstricaciuni unei parti mult mai fragile ce trebuie manevrata. Un altconsiderent foarte important in relatia de transfer a pieselor in ce privesteaplicarea fortei statice este de orientare a piesei in mana in timpultransferului. Daca piesa este transferata plan paralel cu podeaua, fiindretinuta doar de fortele de frictiune dintre degete si piesa, poate aveatendinta de a aluneca din mana, in special la punctele programate deoprire. Prin rotirea axelor mainii perpendicular pe podea in timpultransferului, forta necesara de tinere poate sa descreasca, si robotulpoate fi capabil sa mute la viteza ridicata deoarece degetele mainiiactioneaza asemeni unei opriri fizice pentru piesa.
Considerentele de intretinere si schimbare ar trebui de asemenealuate in considerare in timpul proiectarii. Componentele perisabile ori deuzura trebuie proiectate sa fie usor accesibile pentru schimbari rapide.Schimbul componentelor precum insertii ori degete de asemenea trebuiesa fie usor si rapid. Pe cat posibil se incurajeaza utilizarea elementelor deprindere asemanatoare si daca se poate chiar identice pentru prindereacomponentelor mainii, prin aceasta minimizand numarul de sculenecesare pentru o posibila depanare.
Pag. 58
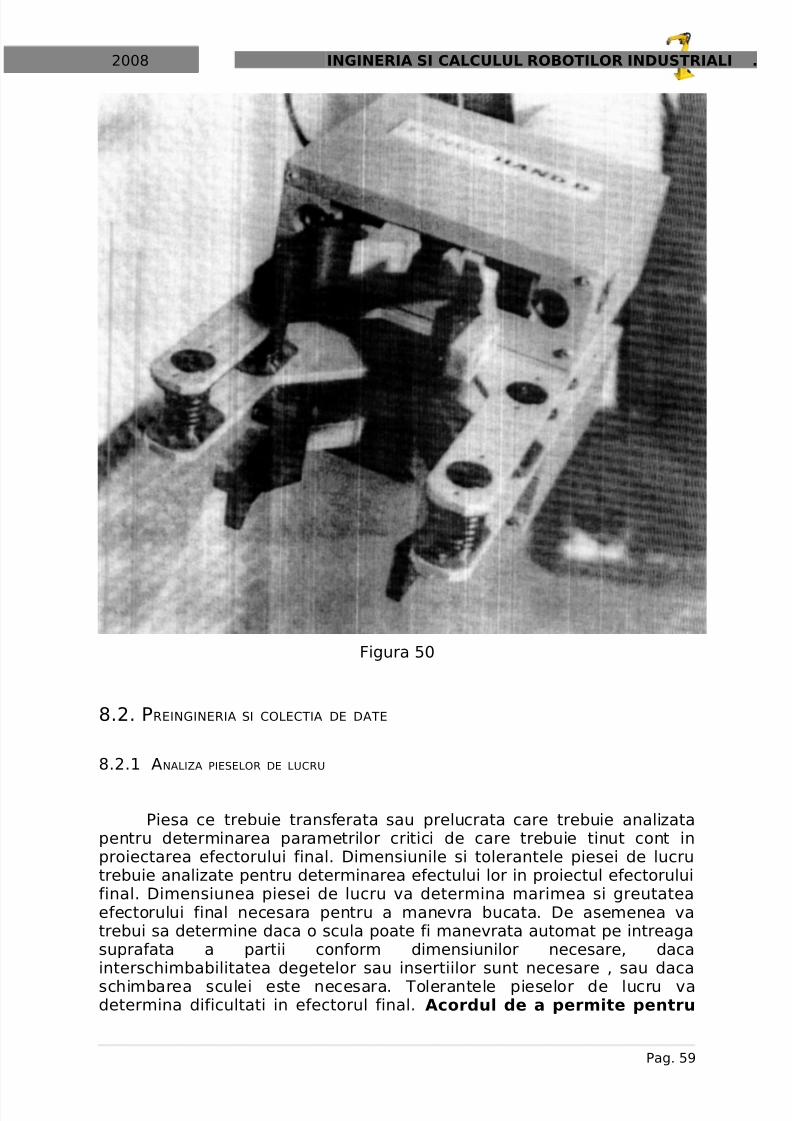
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 59/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Figura 50
8.2. PREINGINERIA SI COLECTIA DE DATE
8.2.1 ANALIZA PIESELOR DE LUCRU
Piesa ce trebuie transferata sau prelucrata care trebuie analizatapentru determinarea parametrilor critici de care trebuie tinut cont inproiectarea efectorului final. Dimensiunile si tolerantele piesei de lucrutrebuie analizate pentru determinarea efectului lor in proiectul efectoruluifinal. Dimensiunea piesei de lucru va determina marimea si greutateaefectorului final necesara pentru a manevra bucata. De asemenea vatrebui sa determine daca o scula poate fi manevrata automat pe intreagasuprafata a partii conform dimensiunilor necesare, dacainterschimbabilitatea degetelor sau insertiilor sunt necesare , sau dacaschimbarea sculei este necesara. Tolerantele pieselor de lucru vadetermina dificultati in efectorul final. Acordul de a permite pentru
Pag. 59
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 60/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
echilibrul mecanic in relatia dintre efectorul final si montajul platal efectorului final al robotului sa corecteze erorile de aliniamentintalnite cand bucatile sunt facute in timpul operatiei deasamblare sau incarcare in dispozitiv bine ajustat sauechipamentul periferic. Daca tolerantele bucatii variaza astfel ca
bucata in prindere este mai mica decat repetabilitatea robotului, undispozitiv elastic poate fi proiectat in efectorul final. Elasticitatea pasiva adispozitivelor asemeni arcurilor pot fi incorporate in efectorul final pentrua-i permite echilibrului sa cuprinda strans tolerantele. Acestea reducrigiditatea efectorului final. Alte dispozitive pasive elastice, asemeni uneiunitati elastice izolate,(RCC) sunt disponibile pentru comercializat.Acestea sunt mutate intre montajul plat al efectorului final al robotului siefectorul final pentru a furniza echilibrul axelor multiple. DispozitiveleRCC, proiectate preliminar pentru aplicatii de asamblare , permiterobotilor asamblarea bucatilor cu ajustari ale imbinarilor mult mai etansdecat repetabilitatea pe care o poate realiza robotul. Dispozitivele elasticeactive cu senzori cu reactie inversa pot fi de asemenea utilizati pentrupotrivirea tolerantelor necesare.
Materialul si proprietatile fizice ale piesei de lucru trebuie sa fieanalizate pentru determinarea efectului lor in proiectul efectorului final.Cea mai buna metoda de manevrare a bucatilor, vacuum,magnetic sau maini mecanice , daca pot fi determinate. Maximulpermis de fortele de prindere si punctele de contact pe bucata pot fideterminate, asemeni cum este numarul punctelor de contact pentru aasigura retinerea pe timpul transferului. Bazat pe proprietati fizice alematerialului, necesitatea controlului fortei aplicate prin intermediulsenzorilor poate fi de asemenea rezolvata.
Greutatea si balansul (centrul de greutate) al piesei de lucru trebuieanalizate pentru determinarea numarului si locul de prindere al punctelorde contact pentru a asigura transferul bucatii. Acestea vor rezolva deasemenea necesarul pentru contrabalans sau suportul punctelor pebucata in adaos cu aderenta punctelor de contact. Incarcatura statica sidinamica a incarcaturilor si momentele de inertie a bucatii si efectorulfinal in toate directiile montajului plat al efectorului final al robotului poatefi analizata verificand care sunt in interiorul parametrilor operationali desiguranta ai robotului.
Suprafata finala si conturul (profilul) piesei de lucru trebuie studiatapentru determinarea metodei si locul de prindere a bucatii. Dacaconturul bucatii este asemeni unor doua sau mai multe prinderiindependente inseamna ca trebuie aplicata, aceasta poate firealizata prin montarea dispozitivelor separate de prindere si /sauscule speciale la locatii diferite pe efectorul final, fiecare prinderesau atasare la diferite sectiuni ale bucatii. Aceasta poate fi ocombinatie de ventuze cu vacum, magneti, si /sau maini mecanice.Legaturile speciale pot fi de asemenea utilizate la tinerea impreuna adoua dispozitive de prindere diferite actionate de acelasi actuator.
Modificarile partii trebuie analizate pentru a determina ce schimbarea unei parti mai mici nu afecteaza functiile bucatii ce poate fi facuta
Pag. 60
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 61/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
pentru reducerea costului si a complexitatii efectorului final. Adesea,schimbarile unei simple bucati, asemeni ugaurilor sau urechilor inparti, poate reduce semnificativ complexitatea proiectarii efectorului finalsi reducerea efortului de constructie in proiectul unei noi componentepentru automatizare si asamblare de roboti.
Nepotrivirea partii trebuie analizata pentru determinarea nevoilor deaprovizionare al senzorilor de toleranta sau compensarea prelucrarii laacomodarea la aceste conditii.
Pentru manevrarea sculei, scula trebuie analizata pentrudeterminarea caracteristicilor efectorului final necesar. Aceasta este inspecial adevarat pentru incorporarea senzorilor de protectie in scula siefectorul final cu piesaa prin nepotrivire.
8.2.2. ANALIZA PROCESELOR
In adaos la analizele interne ale piesei de lucru, o analiza a aplicatieiproceselor trebuie facute pentru determinarea parametrilor optimi pentruefectorul final.
Insasi metodele de proces trebuie analizate, in special in termeniimanualului contra operatiei robotului. In multe cazuri limitarile fizicedictate de un aspect al aplicatiei intr-o maniera certa unde un robot cusau fara aceste constrangeri poate indeplini aplicatia intr-o manieradiferita dar mult mai eficienta. Un exemplu al acestor implicari
alternativa de selectionare a sculei si executarea lucrului pe opiesa sau mai degraba selectarea partii si prinderea ei in scula. Inmulte cazuri marimea si greutatea capabila de transportat a uneipersoane este limitata, fortand persoana sa manevreze greutatimici a unei bucati sau scule. Un robot , cu marimea sa impresionanta sicapacitatile sarcinei utile, nu are aceasta restrictie. Astfel poate fi utilizatla luarea bucatilor mari la o scula stationara sau luarea sculelor multiple laefectuarea lucrului pe o bucata. Aceasta poate creste eficienta operatieiprin reducerea ciclului de timp, imbunatatind calitatea si crescandproductivitatea. De aceea, in analiza proceselor, considerate alternativeof having the robot take a part to a tool or a tool to a part si a
hotara care apropiere este mai eficienta. Cand un robot manevreazao bucata, mai exact o scula, conexiunile liniei electrice la scula, a careiexperienta mai mica la incovoiere si mai putin expus la problemeatunci cand se misca fix, sunt mai putine griji.
Deoarece capacitatea de incarcare este in crestere, un robot deasemenea poate fi echipat cu un efector multifunctional. Acesta poate fisimultan sau secvential, efectuand mai intai munca pe o piesa necesaraunei persoane la ridicarea unei scule la timp pentru realizarea operatiei,rezultand o productivitate mai scazuta. De exemplu, efectorul finalintr-o matrita de turnat sub presiune aplicatia masinii de
descarcare nu poate fi doar descarcarea partii, dar de asemeneapulverizarea lubrifiantului in matrita pe o fata a matritei.
Pag. 61
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 62/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Cantitatea sau suprafata partilor sau a sculelor in procesulaplicatiilor trebuie analizat pentru determinarea performantelor necesarepentru efectorul final. Acesta va dicta numarul de maini sau efectori finalece sunt necesari. Efectorul final trebuie proiectat pentru a cuprindeintreaga suprafata a partii, oricare automat in scula pentru efectorul final,
prin intermediul schimbului automat al sculei, sau prin schimbul manual.Schimbul manual poate cuprinde ajustarea sculei la manevrarea pediferite suprafete ale partii sau interschimbabilitatea degetelor,insertiilor,sau a sculelor intr-o mana comuna. Pentru a reduce timpul deschimb manual, a trebui prevazute capabilitatile de deconectare rapida sialiniamentul pozitiv al trasaturilor asemeni stifturilor de centrare saulocalizare. Pentru aplicatiile de schimbare automata a sculei, inregistrarearesurselor mecanice, asemeni stifturilor conice si bucselor, asiguraaliniamentul propriu al sculelor. Senzorii de verificare trebuie deasemenea sa fie incorporati in aplicatiile automate de schimbare a sculei.
Prezentarea si dispunerea pieselor de lucru inauntrul sistemuluirobotului afecteaza designul efectorului final. Pozitia si orientarea pieseide lucru la alta ridicare sau punct de eliberare va determina posibilulcontact al punctelor pe piesa, verificarea dimensiunilor necesare inefectorul final pentru a evita perturbatiile, pentru necesitatile demanipulare ale efectorului final, fortele si momentele efectorului final sipiesaa in relatie cu montajul plat al efectorului final al robotuli,necesitatea senzorilor in efectorul final pentru detectarea pozitiei siorientarea partii, si complexitatea efectorului final.
Succesiunea evenimentelor si ciclul de timp necesar proceselor are
o relatie directa cu complexitatea proiectarii prelucrarii. Stabilirea cicluluide timppentru operatie va determina cate scule (sau maini) este nevoiepentru a face fata necesitatilor. Mainile cu multiple functii de manevrare apartilor adesea permit robotului cresterea productivitatii operatiilor prinmanevrarea mai multor parti pe ciclu decat se poate face manual.Scccesiunea evenimentelor poate fi dictata de asemenea de uzulefectorilor finali multifunctionali acesta trebuie sa execute operatii diferitepe timpul ciclului robotului. De exemplu, in descarcarea masinii, anteriormenrionat, efectorul final nu trebuie doar sa prinda piesaa, ci pulverizarealubrifiantului pe forma matritei masinii. Similar, un efector final alrobotului poate de asemenea manevra bucata si realizarea muncii in
acelasi timp, asemeni masurarii automate si gaurirea unei gauri. Secventaevenimentelor in miscare de la o operatie la altapoate cauza proiectareaefectorului final incluzand cateva miscari in plus nefiind disponibile inrobotprin adougarea de axe de miasare in plus efectorului final pentru acuprinde secventa operatiilor dintre varietatea sistemului de elemente.
In procesul de inspectie necesar va afecta proiectul efectorului final.Cerintele de manipulare ale efectorului final, proiectarea senzorilor saumasurarea in efectorul final, si pozitia de contact al efectorului final cubucata sunt toate afectate de necesitatile inspectiei tehnice. Precizia inpozitionarea piesei de lucru este un alt considerent pentru efectuarea
inspectiei necesare.
Pag. 62
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 63/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Conditiile de prelucrare a partii va determina nevoia de senzoriintegrati in efectorul final, la fel cum este necesar pentru functionareaindependenta prin sisteme multiple de prindere.
Mediul inconjurator trebuie luat in considerare in proiectareaefectorului final. Efectele temperaturii, umiditatii, contaminarea aerului,materialele corozive sau caustice, vibratiile si socurile trebuie evaluate , lafel cum trebuie facuta selectia materialelor, selectia energiei, senzorii,mecanica si resursele pentru protejarea dispozitivelorin efectorul final.
8.3. PROIECTUL GHIDAJELOR EFECTORULUI FINAL
Proiecarea ghidajelor pentru efectorul final la cel mai potrivit criteriudiscutat anterior este dupa cum urmeaza:
1. Proiectarea pentru o deplasare rapida sau schimb de efector finalprin necesarul unui numar mic de scule (chei fixe, surubelnite,etc.) ce trebuie utilizate. Utilizarea aceluias element deasamblare oriunde este posibil.
2. Asigurarea stifturilor de montaj, canal pentru cheie, sau linii dereper pentru schimb rapid pentru acuratetea inregistrarilor sialiniament.
3. Rotunjirea tuturor colturilor pentru protectia furtunelor si liniilorde la frecarea si taiere si ferirea personalului de posibile raniri.
4. Permiterea unei flexibilitati maxime a liniilor si furtunelor la axelede miscare extreme.
5. La reducerea greutatii, utilizarea gaurilor de lumina sau amaterialelor luminoase oriunde este posibil.
6. Pentru considerarea uzurii, stratul dur a materialelor luminoase sipunerea materialelor rigide in materiale fine.
7. Conceptualizarea si evaluarea alternativelor in efectorul final.
8. Sa nu fie "zgarcit si pacalit la livrare" in proiectarea
efectorului final, asigura suficient efort si cont cheltuitpentru producerea unei productii corespunzatoare,efector final sigur si nu un prototip.
9. Proiect cu extra miscari in efectorul final pentru a asista robotulin aplicatiile lui.
10. Proiect cu senzori de detectie a prezentei partilor in timpultransferului (comutator de cursa, proximitate, jet de aer, etc.).
11. Pentru siguranta in aplicatiile de manevrare a pieselor, considerace efect va avea asupra efectorului final in cazul intreruperiialimentarii. Foloseste dispozitive cu sistem de blocare a prinderiisau valve cu opritor pentru a spori gradul de siguranta.
Pag. 63
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 64/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
12. Punerea stifturilor sau a zonelor in efectorul final pentruprotejarea componentelor mult mai scumpe si reducereadowntime.
13. Cand manipularea sculelor se face cu un brat robotizat,construit in examinarea capacitatilor sculei, altul inefectorul final sau echipamentul periferic.
14. Proiectarea functiilor multiple in efectorul final.
15. Furnizarea accesibilitatii pentru intretinere si schimb rapid alpartilor componente.
16. Utilizarea dechiderilor etansate pentru efectorul final.
17. Furnizarea insertiilor interschimbabile sau degete pentru partice pot fi inlocuite.
18. La manevrarea bucatilor fierbinti, asigura lasarea caldurii sau
scut de protectie pentru protejarea efectorului final si a robotului.19. Suportul actuatorilor si valvelor pentru efectorul final pe
antebratul robotului.
20. Construit in conformitate cu fixarea efectorului final unde estenecesar.
21. Proiectarea senzorilor de actionare in efectorul final pentrudetectarea inchis/deschis sau alte conditii de miscare.
22. Analiza cerintelor de inertie, centrul de greutate al incarcarii,forta centrifugala, si alte considerente dinamice in proiectarea
efectorului final.23. Aspectul necesitatilor de miscare pentru dispozitivele de
prindere in ridicarea partilor (mana cu simpla actiune trebuie safie capabila sa miste bucatile in timpul ridicarii; dubla actiune amainii intre varfuri a bucatii intr-o singura directie; trei sau patrudegete intre varfuri a bucatii in mai mult de o directie).
24. Cand utilizezi un electromagnet la o mana pentru ridicare,considera magnetismul rezidual in parti si posibila aschiere laridicare.
25. Cand utilizam ventuze cu vacuum pe bucati uleioase, deasemenea utilizarea unui suflu pozitiv.
26. Aspectul la fortele de intercalare ale robotului in utilizareaefectorului final in aplicatiile de asamblare.
27. Mentinerea orientarii partii in efectorul final prin forta sicoeficient de frecare sau aspectul dispunerii.
Pag. 64

5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 65/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
9 SUMAR
Actualmente, multe din aplicatiile robotilor industriali au implicat undesign special al efectorului final sau dispozitive simple de prindere. Inmajoritatea aplicatiilor uzul simplu al efectorilor finali in cele mai bunesolutii de la pinctul de vedere al productivitatii si al economiei. Daca vor finevoie de aplicatii mai complexe pentru robot , mainile universale cumare dexteritate vor fi necesare. Diferitele contributii importante au fostfacute in indepartata teorie a controlului mainii cu multidegete, dartehnologia de proiectare a mainii cu mai multe degete hard nu a fost incamaturizata. Cautarile in continuare pentru descoperirea unei mai mariflexibilitati a dispozitivelor multifunctionale ale mainii universale hardaceasta poate adopta o mare varietate de marimi si de profiluri ale
partilor. Avansul acestei tehnologii a face o mai mare dexteritatemanipularii robirice poate fi asteptata.
Pag. 65
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 66/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
CONFIRMARE
Acest capitol este revizuit de la capitolul 8 al primei editii al cartii„Handbook of Industrial Robotics”, cu adougarea a catorva materiale dincapitolul 37, " Prelucrarea capetelor de brat " de R. D. Potter.
REFERINTE
Ando, Y., s. a. 1990. " Development of Micro Grippers". In microSystem Technologies 90. Ed. H. Reichl. Berlin: Springer-Verlag. 855-849.
Arai, T., R. Larsonneur, and Y. M. Jaya. 1993. "Basic Motion of MicroHand Module." In Processing of the 1993 JSME International Conferenceon Advanced Mechatronics. Tokio. 92-97.
Chen, F. Y.1982. " Gripping Mechanisms for Industrial Robots."Mechanism and Machine Theory 17(5), 299-311.
Crossley, F. R. E., and F. G. Umholts, 1977. "Design for a Three-Fingered Hand." In Robot and Manipulator Sistems. Ed. E. Heer. Oxford:Pergamon Press. 85-93.
Hirose, S., and Y. Umetani. 1977. " The Development of a Soft Gripperfor the Versatile Robot Hand." In Proceedings of the SeventhInternational Simposium on Industria Robots, Tokyo. 353-360.
Jacobsen, S. C., et al. 1981. "The Utah/MIT Dextrous Hand: Work inProgress." In Robotics Research. Ed. M. Brady and R. Paul. Cambridge:MIT Press. 601-653.
Kato, I., et al. 1969. "Multi-functional Myoelectric Hand Prosthesis withPressure Sensory Feedback System-Waseda Hand 4P. "In Proceedingsof the Third International Symposium on External Control of HumanExtremities, Belgrade.
Kimura, M., et al. 1995. "Force control of Small Gripper UsingPiezoelectric Actuator." Jurnal of Advanced Automation Technology7(5), 317-322.
Li, Z. and S. Sastry. 1990. "Issues in Dextrous Robot hands." InDextrous Hands. Ed. S. T. Venkatarman and T. Iberall. New York:Springer-Verlag. 154-186.
Maekawa, H., K. Tanie, and K. Komorya. 1997. "Tactile Feedback forMultifingered Dynamic Grasping." Control Systems 17(1), 63-71.
Mason, M.T., andJ. K. Salisbury. 1985. Robot Hands and the Mecanics of
Manipulation. Cambridge: MIT Press. 80-81.
Pag. 66
5/8/2018 Ingineria Si Calculul Robotilor ali - Maini V5 - slidepdf.com
http://slidepdf.com/reader/full/ingineria-si-calculul-robotilor-ali-maini-v5 67/67
2008 INGINERIA SI CALCULUL ROBOTILOR INDUSTRIALI .
Murray, R. M., Z. Li, and S.S. Saatry, 1994.A Mathematical Introductionto Robotic Manipulation, London: CRC Press. 382-387.
Okada, T. 1982. "Computer Control of Multijointed Finger System forPrecise Object-Handling.", IEEE Transactions on Systems, Man and
Cybernetics SMC-12(3), 289-299. Okai, S., and Y.Kuroiwa. 1969. " Machine Hand for Bar Works." Journal
of Mechanical Engineering Laboratory 23(4). [In Japanese.]
Schlesinger, G. 1919. Der Mechanische Aufbau der Kunstlichen GliederPart 2 of Ersazzgheder und Arbeitshilfen. Berlin: Springer.
Sheldon, O.L. 1972. "Robots and Remonte Handling Methods forradioactive Materials." In Proceedings of the Second InternationalSymposium on Industrial Robots. Chicago. 235-256.
Skinner, F. 1974." design of a Multiple Prehension Manipulator System."
ASME Paper 74-det-25. Sugano, S., et al. 1984 >" The Keyboard Playing by an
Anthropomorphic Robot." In Preprints of Fith CISM-IFToMM Symposiumon Theory and Practice of Robots and Manipulators. Udine 113-123.
Tanikawa, T., T. Arai, and T. Matsuda. 1996." development of MicroManipulation System with Two-Finger Micro Hand." In Proceedings of the 1996 IEEE/RSJ International Conference on Robots and IntelligentSystems. Osaka. 850-855.
Umetsu, M., and K. Oniki. 1993. "Compliant of Arm-Hand System." In
Proceedings of the 1993 JSME International Conference on AdvancedMechatronics, Tokyo. 429-432.
Yoshikawa, T., and K. Nagai. 1990." Analisis of Multi-fingered Graspingand Manipulation." InDextrous Robot Hands. Ed. S. T. Venkataramanand T. Iberall. New York: Springer-Verlag. 187-208.
STUDIU SUPLIMENTAR
Endelberger, J.F. Robotics in Practice. London: Kogan Page, 1980. Kato, I., ed. Mechanical Hand Illustrated. Tokyo: Survery Japan. 1982.
Pag. 67