elemente de comanda
DESCRIPTION
eTRANSCRIPT
CAPITOLUL 6ELEMENTE DE COMANDĂ
Elementele de comandă utilizate în mod obişnuit sunt: releele
electromagnetice şi convertoarele.
6.1. Relee electromagnetice.
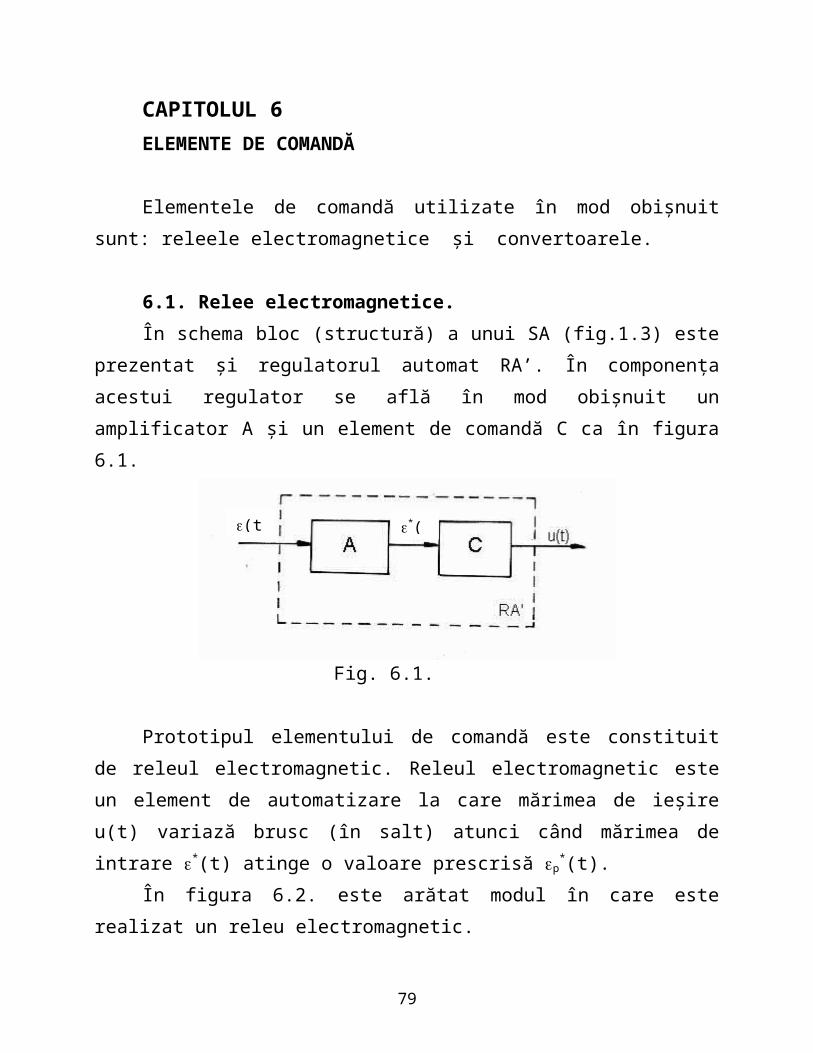
În schema bloc (structură) a unui SA (fig.1.3) este prezentat şi regulatorul
automat RA’. În componenţa acestui regulator se află în mod obişnuit un
amplificator A şi un element de comandă C ca în figura 6.1.
Fig. 6.1.
Prototipul elementului de comandă este constituit de releul electromagnetic.
Releul electromagnetic este un element de automatizare la care mărimea de ieşire
u(t) variază brusc (în salt) atunci când mărimea de intrare *(t) atinge o valoare
prescrisă p*(t).
În figura 6.2. este arătat modul în care este realizat un releu electromagnetic.
Legendă: 1-Miez feromagnetic; 2 – Bobină parcursă de curentul de comandă Ic; 3-
Armătură mobilă din material feromagnetic; 4 – Arc; 5- Pastilă din material
nemagnetic; 6- Material izolator; 7 – Lamele elastice din tombac; 8 – contact
normal deschis ( Ic=0).
Privit sub formă bloc, la intrarea releului se aplică IC şi se obţine la ieşire IS
(fig. 6.3).
79
*(t)(t)
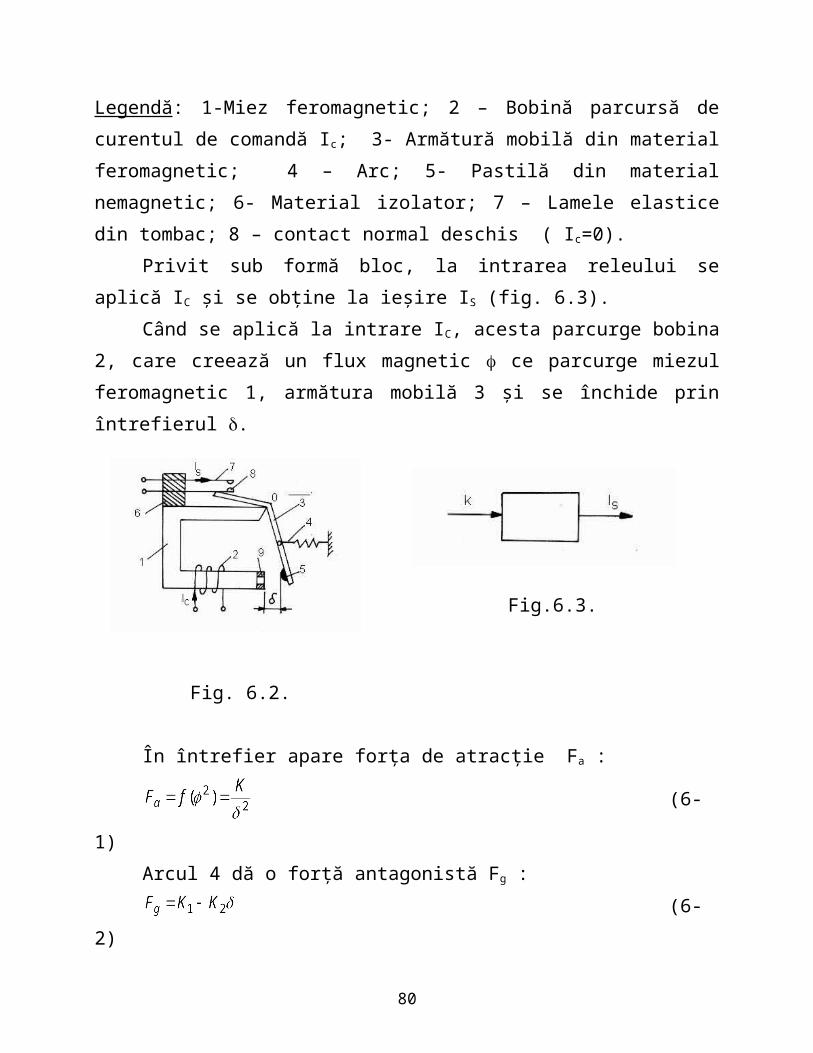
Când se aplică la intrare IC, acesta parcurge bobina 2, care creează un flux
magnetic ce parcurge miezul feromagnetic 1, armătura mobilă 3 şi se închide prin
întrefierul .
Fig. 6.2.
În întrefier apare forţa de atracţie Fa :
(6-1)
Arcul 4 dă o forţă antagonistă Fg :
(6-2)
Variaţia Fa şi Fg este arătată în figura 6.4.
Fa variază hiperbolic cu iar Fg
variază liniar cu .
Se observă că:
(6-3)
creşte mai repede cu cât scade.
Armătura mobilă se opreşte când =min; în
acelaşi timp se roteşte în jurul punctului 0 şi
exercită o forţă de apăsare asupra lamelor
elastice 7 care închid contactul 8. În această
situaţie prin lamelele 7 circulă curentul de sarcină IS IC (funcţia de amplificare a
releului – fig. 6.5).
80
Fig.6.3.
Fig. 6.4.
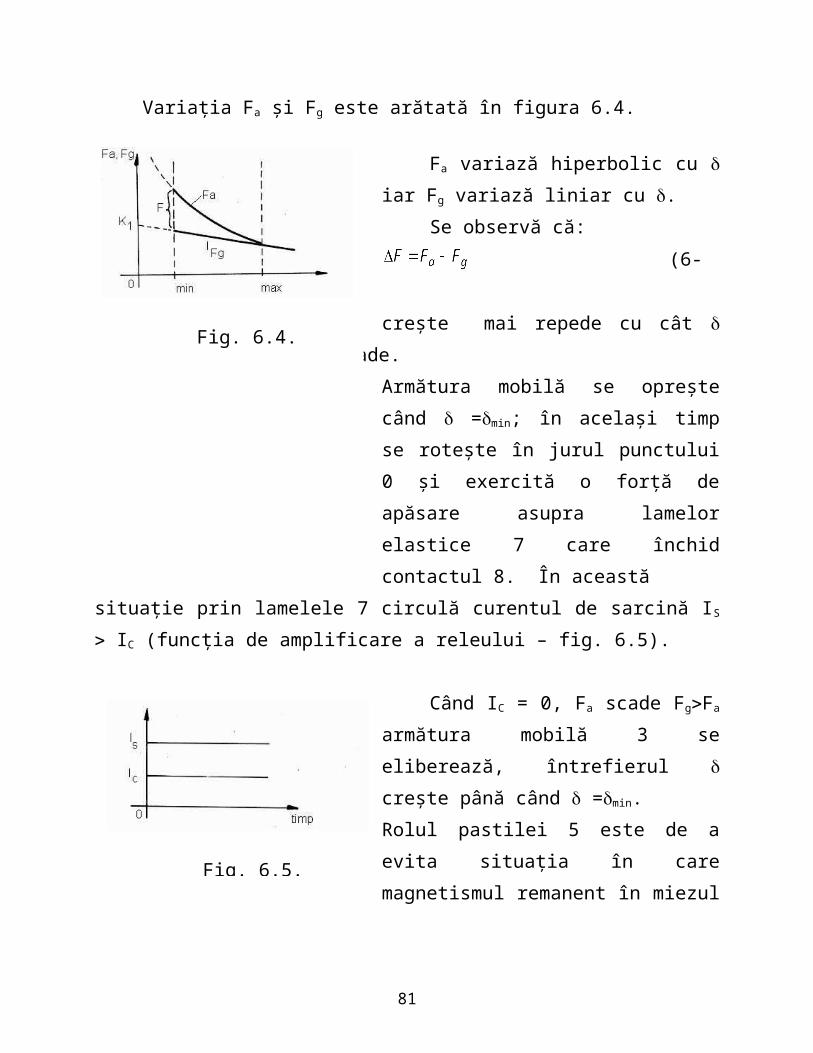
Când IC = 0, Fa scade FgFa armătura
mobilă 3 se eliberează, întrefierul creşte
până când =min.
Rolul pastilei 5 este de a evita situaţia în care
magnetismul remanent în miezul 1 să
împiedice desprinderea armăturii mobile 3
când IC=0.
Acest releu nu poate fi utilizat în c.a. deoarece Fa=f(2) şi aceasta variază în
timp ca în figura 6.6.
Aceasta ar face ca armătura mobilă să fie
atrasă şi apoi să fie readusă în poziţia deschis
ş.a.m.d. ceea ce ar conduce la vibraţia
contactelor. Pentru a evita aceasta, se
montează o spiră în scurtcircuit 9, ca în
figura 6.2. În această situaţie spira în
scurtcircuit (din cupru) produce un flux 2.
Fig. 6.6.
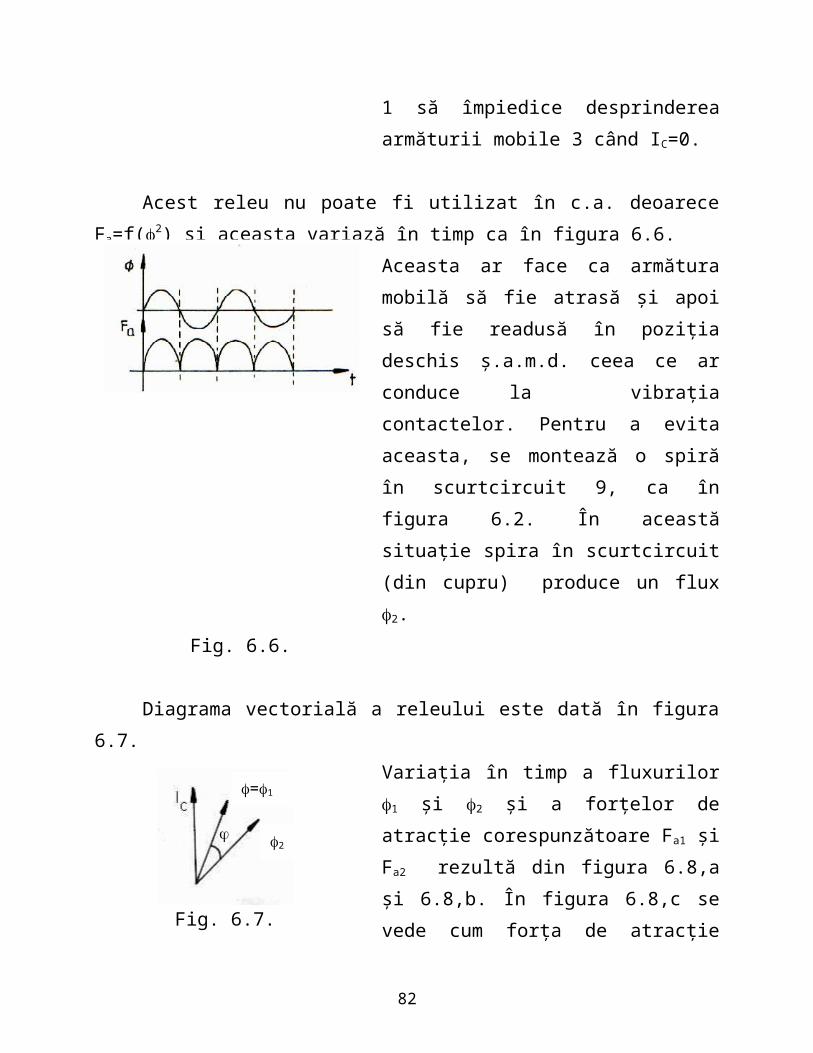
Diagrama vectorială a releului este dată în figura 6.7.
Variaţia în timp a fluxurilor 1 şi 2 şi a
forţelor de atracţie corespunzătoare Fa1 şi Fa2
rezultă din figura 6.8,a şi 6.8,b. În figura
6.8,c se vede cum forţa de atracţie rezultată
Ft este tot timpul 0.
Fig. 6.7.
Observaţie. La releele electromagnetice de c.c. armăturile sunt confecţionate
din material feromagnetic moale. La releele electromagnetice de c.a. sunt utilizate
tole de oţel electrotehnic.
81
Fig. 6.5.
Fig. 6.7.
=1
2
Releul prezentat este cunoscut sub denumirea de releu cu paletă. Constructiv
el este realizat din mai multe perechi de contacte 7 (funcţia de multiplicare).
În figura 6.9. este prezentat releul electromagnetic cu plonjor. Legendă: 1 –
Bobina de comandă; 2 – Plonjor; C1,C2,C3,C4 – contacte; C1,C3 – contacte
normal deschise cnd (când Ic=0); C2,C4 – contacte normal închise cnî (când Ic=0).
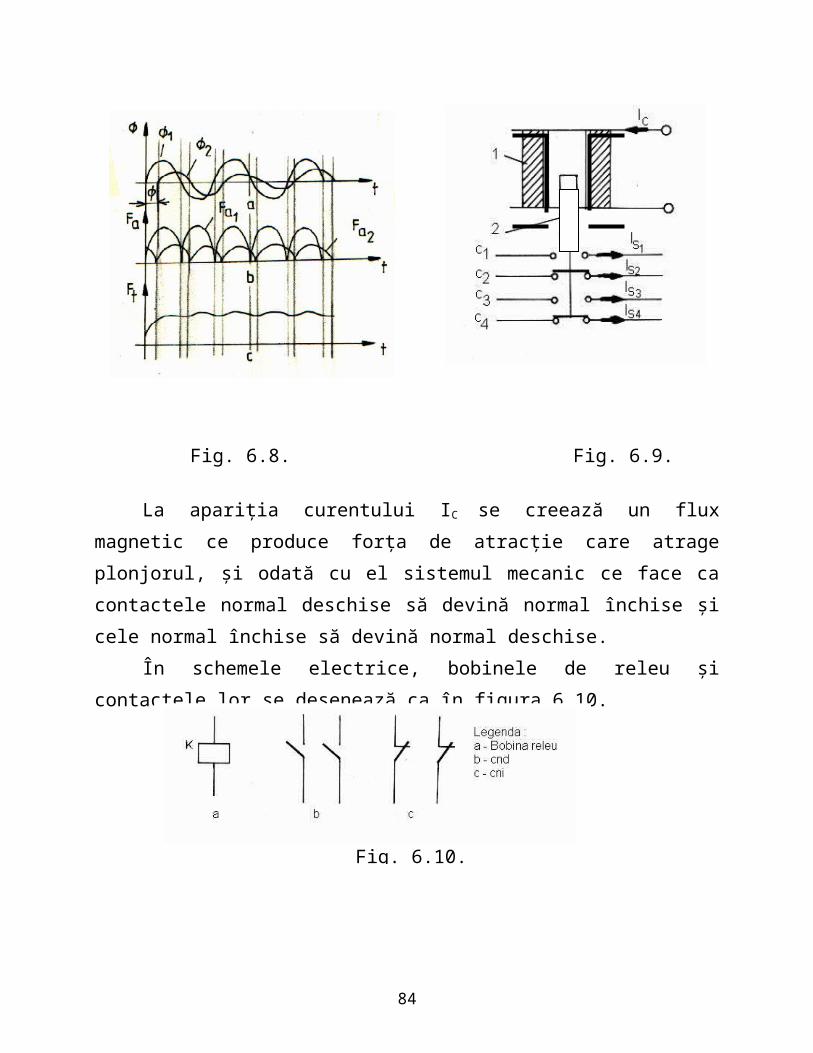
Fig. 6.8. Fig. 6.9.
La apariţia curentului IC se creează un flux magnetic ce produce forţa de
atracţie care atrage plonjorul, şi odată cu el sistemul mecanic ce face ca contactele
normal deschise să devină normal închise şi cele normal închise să devină normal
deschise.
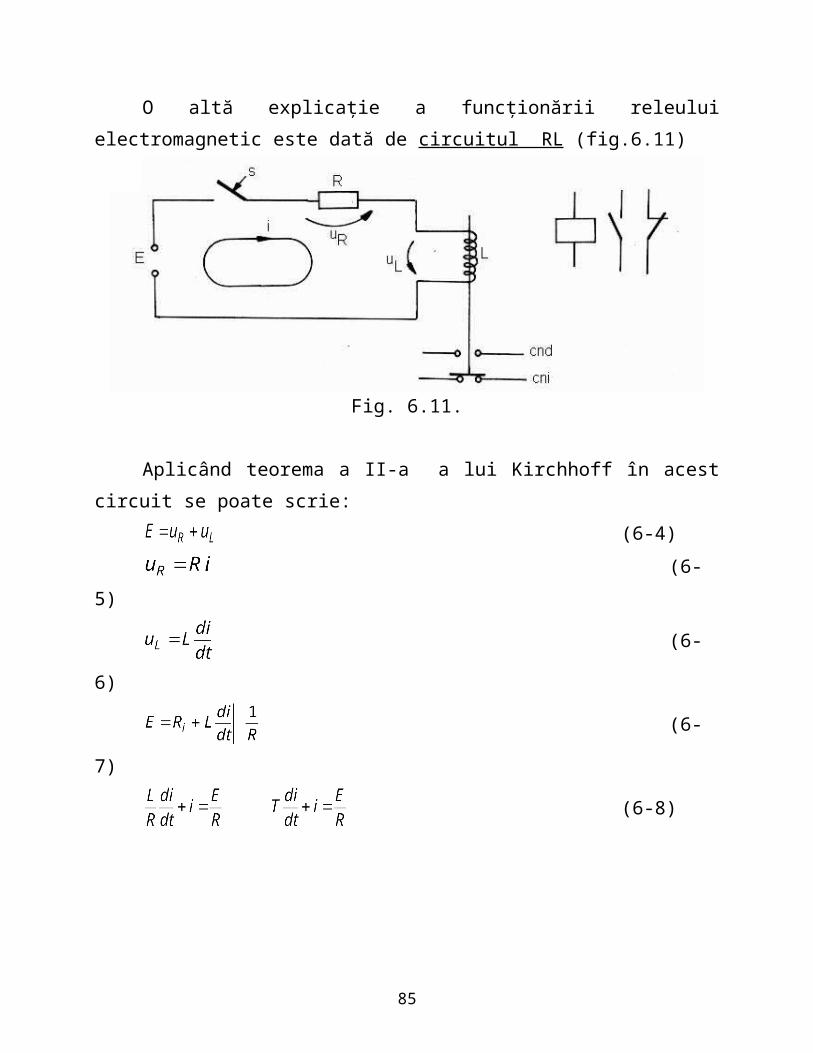
În schemele electrice, bobinele de releu şi contactele lor se desenează ca în
figura 6.10.
O altă explicaţie a funcţionării releului electromagnetic este dată de circuitul
RL (fig.6.11)
82
Fig. 6.10.
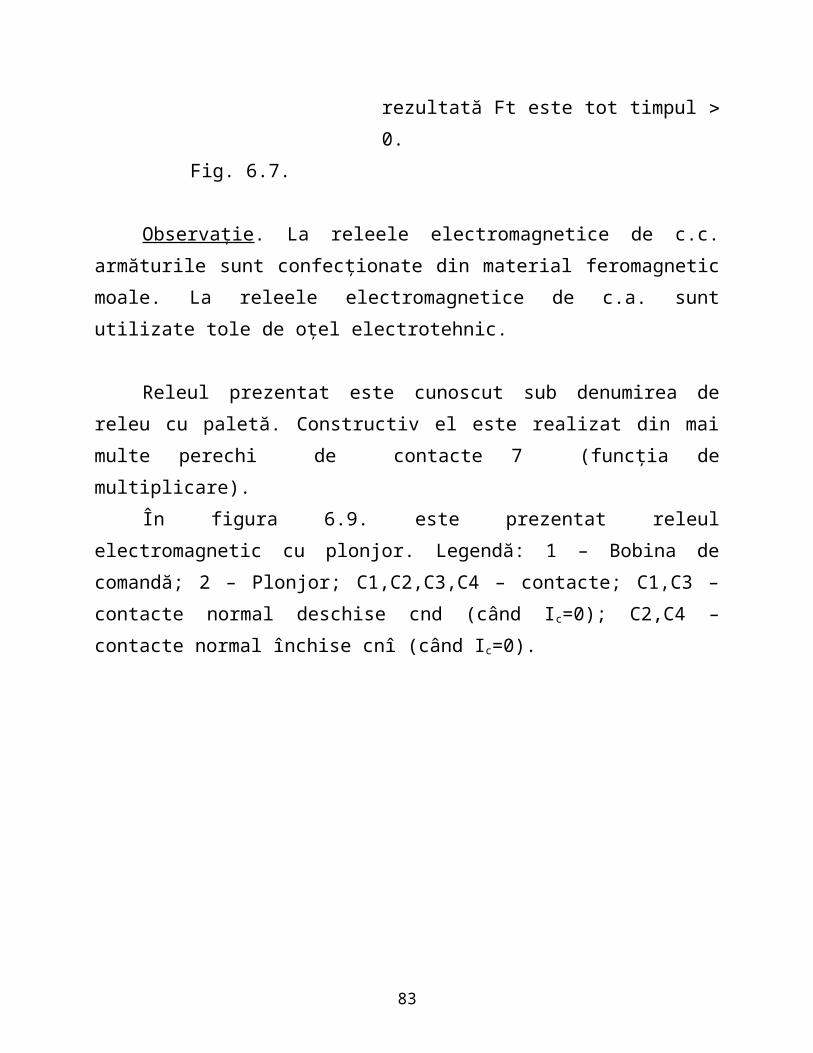
Fig. 6.11.
Aplicând teorema a II-a a lui Kirchhoff în acest circuit se poate scrie:
(6-4)
(6-5)
(6-6)
(6-7)
(6-8)
Unde uR şi uL sunt pierderile de tensiune pe rezistorul R respectiv bobina L
(De făcut diferenţa între pierderea de tensiune şi căderea de tensiune care este
vectorială – la circuite în c.a.).
Relaţia (6-8) este o ecuaţie diferenţială liniară, de ordinul 1, neomogenă, cu
coeficienţi constanţi. Soluţia i se caută sub forma a două soluţii suprapuse it şi if. În
care it este componenta tranzitorie şi este o soluţie generală a ecuaţiei omogene iar
uf este componenta forţată (impusă) care este o constantă şi o soluţie particulară a
ecuaţiei neomogene.
Se caută it de forma:
(6-9)
(6-10)
83
(6-11)
(6-12)
(6-13)
(6-14)
(6-15)
Reprezentarea grafică a variaţiei este dată în figura 6.12.
(6-16)
Fig. 6.12.
T este de natura timpului (este pe axa timpului t) şi este numită constanta de
timp a circuitului.
T este timpul după care s-ar ajunge la regimul permanent, dacă viteza de
variaţie a curentului ar fi constantă şi egală cu cea din momentul iniţial.
(6-17)
84
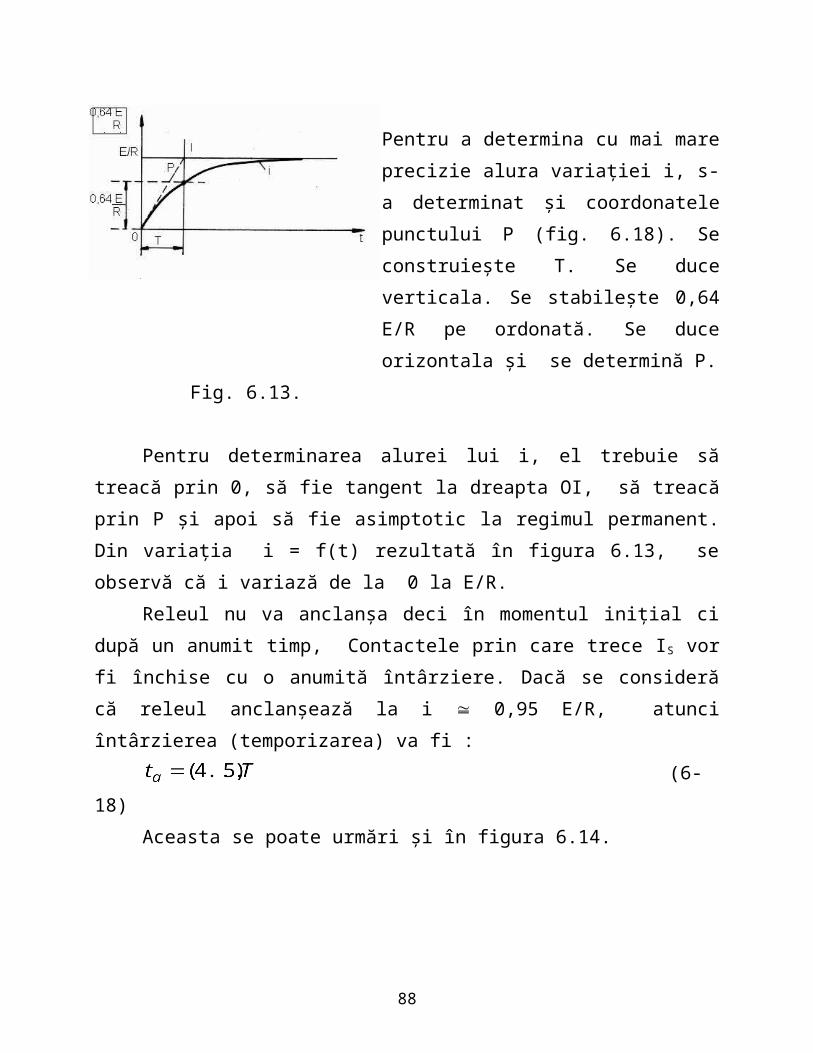
Pentru a determina cu mai mare precizie
alura variaţiei i, s-a determinat şi
coordonatele punctului P (fig. 6.18). Se
construieşte T. Se duce verticala. Se
stabileşte 0,64 E/R pe ordonată. Se duce
orizontala şi se determină P.
Fig. 6.13.
Pentru determinarea alurei lui i, el trebuie să treacă prin 0, să fie tangent la
dreapta OI, să treacă prin P şi apoi să fie asimptotic la regimul permanent. Din
variaţia i = f(t) rezultată în figura 6.13, se observă că i variază de la 0 la E/R.
Releul nu va anclanşa deci în momentul iniţial ci după un anumit timp,
Contactele prin care trece IS vor fi închise cu o anumită întârziere. Dacă se
consideră că releul anclanşează la i 0,95 E/R, atunci întârzierea (temporizarea)
va fi :
(6-18)
Aceasta se poate urmări şi în figura 6.14.
Fig. 6.14.
Pentru a vedea cum variază uR şi uL, se pleacă de la relaţiile (5-5) şi (5-6).
(6-19)
(6-20)
85
În figura 6.15 se poate urmări variaţia uR şi uL.
Fig. 6.15.
Aceste relee electromagnetice mai sunt numite şi relee intermediare, datorită
funcţiei de multiplicare a contactelor.
Observaţie. Referitor la constanta de timp T (fig. 6.16).
Fig. 6.16.
(6-21)
(6-22)
Egalând relaţiile (6-21) şi (6-22) se obţine (6-23)
Rezultă că în orice punct se duce tangenta la curba i se obţine T. /6.1/
Studiul circuitului RL se poate efectua şi cu ajutorul plecând de la relaţia
(6-8) :
86

(6-8)
Se aplică transformata Laplace:
(6-24)
(6-25)
(6-26)
este :
(6-27)
Se aplică forma a doua a teoremei lui Heaviside.
Dacă , atunci
(6-28)
În cazul nostru:
(6-29)
(6-30)
(6-31)
(6-32)
La aceste relee, închiderea respectiv deschiderea contactelor se realizează
aproape instantaneu, constantele de timp fiind foarte mici. În practică este necesar
de multe ori de a avea o întârziere mai mare între momentul acţionării unui buton
ce permite curentului să parcurgă spirele bobinei şi momentul când aceste contacte
se închid sau se deschid. Pentru aceasta au fost imaginate diferite dispozitive, care
87
să realizeze întârzierile dorite. Aceste dispozitive au fost ataşate releelor
electromagnetice obişnuite (releelor intermediare) şi s-au obţinut releele de timp.
Întârzierile se pot obţine cu mecanisme de ceasornic, cu micromotoare
electrice, cu programatoare electromecanice, cu dispozitive pneumatice, hidraulice
etc. Cele mai simple şi cele mai utilizate sunt cele cu circuit RC.
Schema electrică a unui astfel de circuit este dată în figura 6.17.
Fig. 6.17.
(6-33)
(6-34)
(6-35)
(6-36)
(6-37)
(6-38)
(6-39)
(6-40)
(6-41)
(6-42)
(6-43)
(6-44)
(6-45)
88

(6-46)
Fig. 6.18.
(6-47)
(6-48)
(6-49)
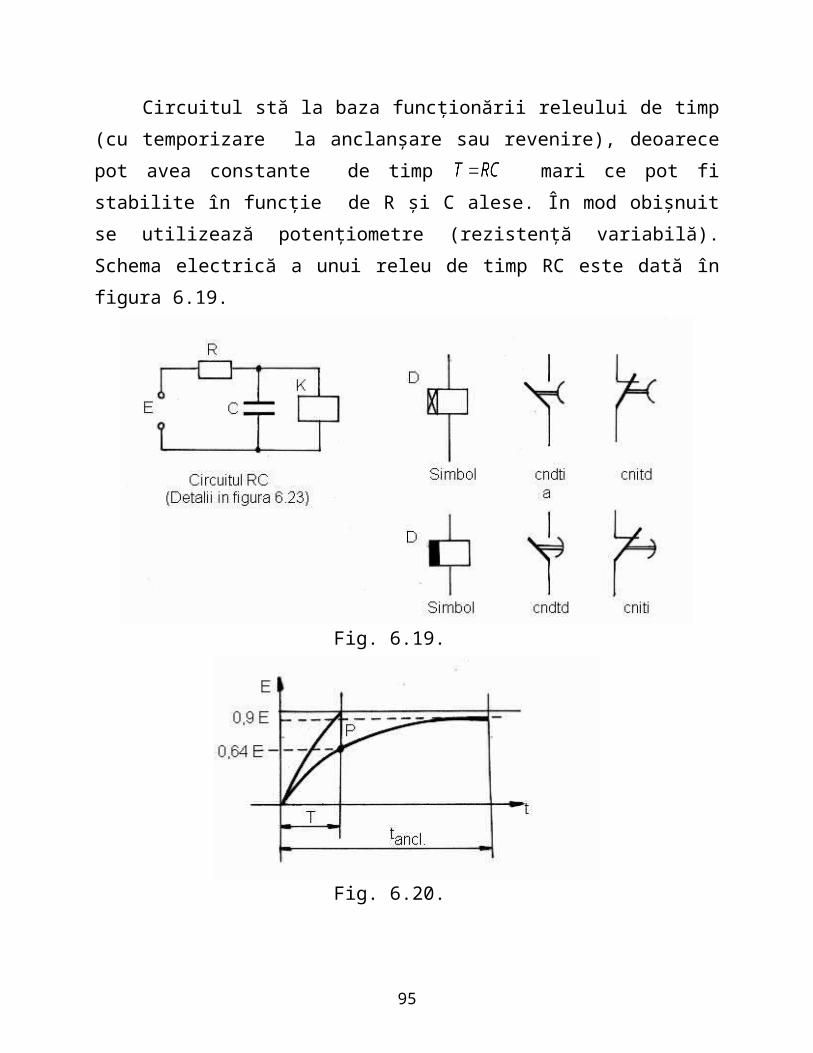
Circuitul stă la baza funcţionării releului de timp (cu temporizare la
anclanşare sau revenire), deoarece pot avea constante de timp mari ce pot fi
stabilite în funcţie de R şi C alese. În mod obişnuit se utilizează potenţiometre
(rezistenţă variabilă). Schema electrică a unui releu de timp RC este dată în figura
6.19.
89
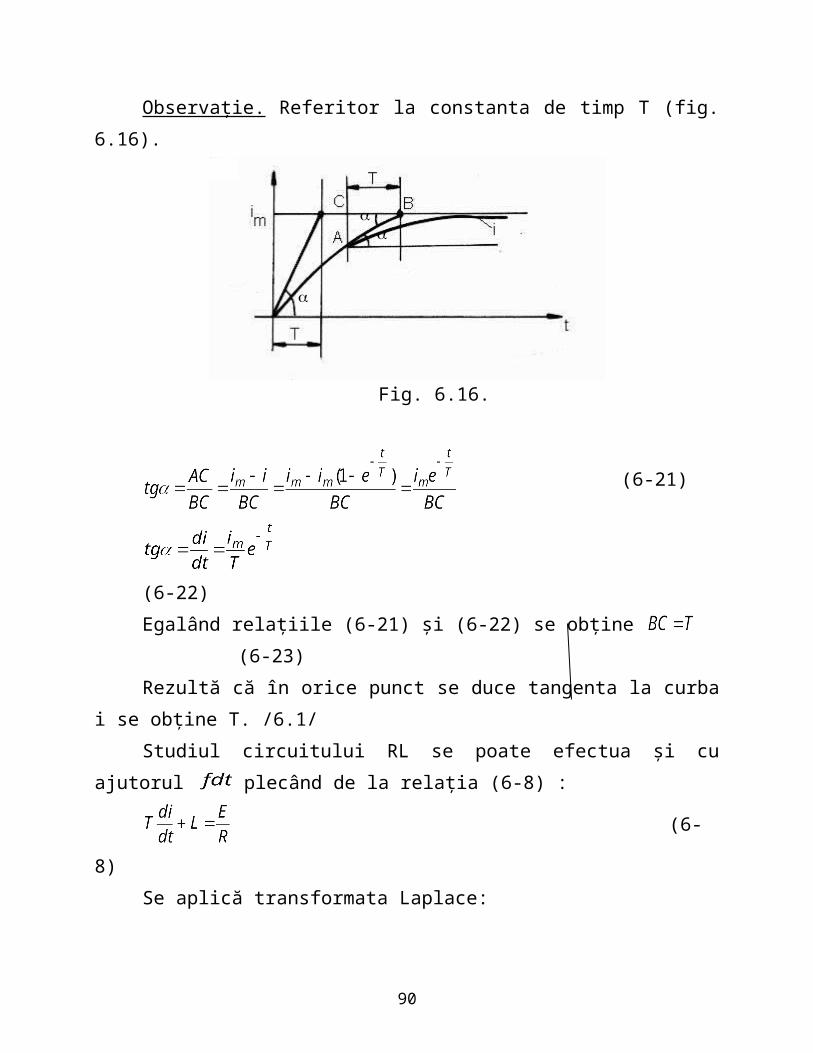
Fig. 6.19.
Fig. 6.20.
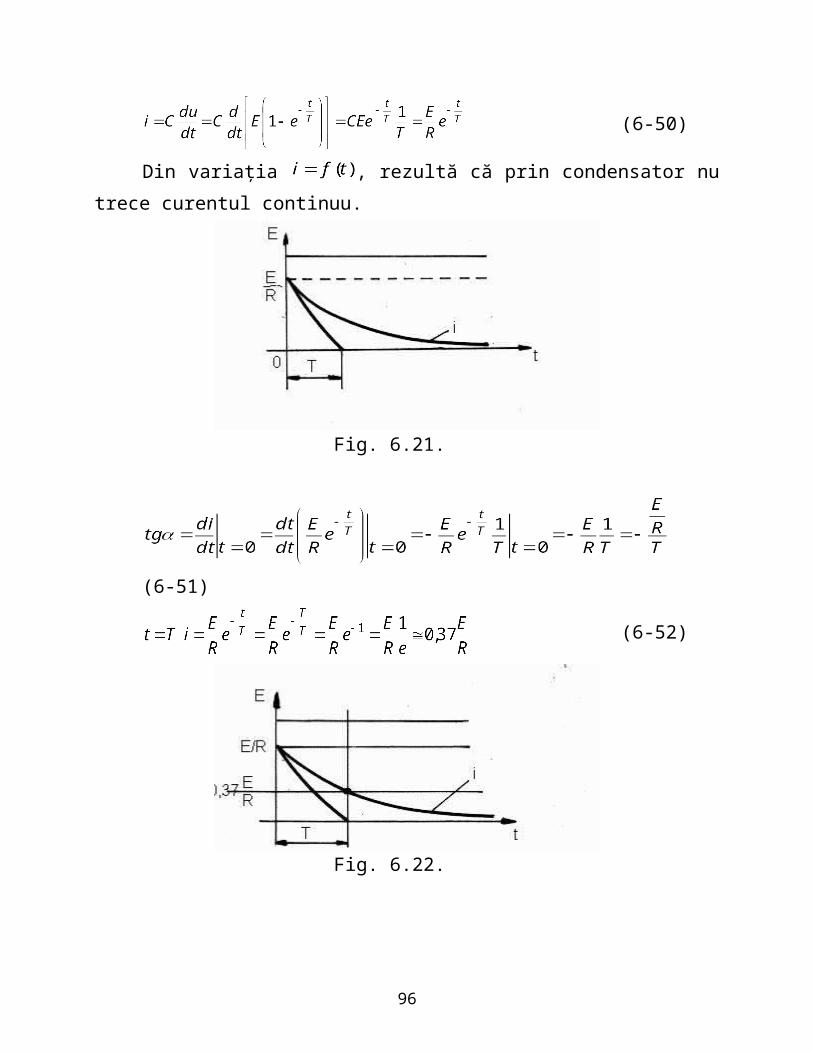
(6-50)
Din variaţia , rezultă că prin condensator nu trece curentul continuu.
90
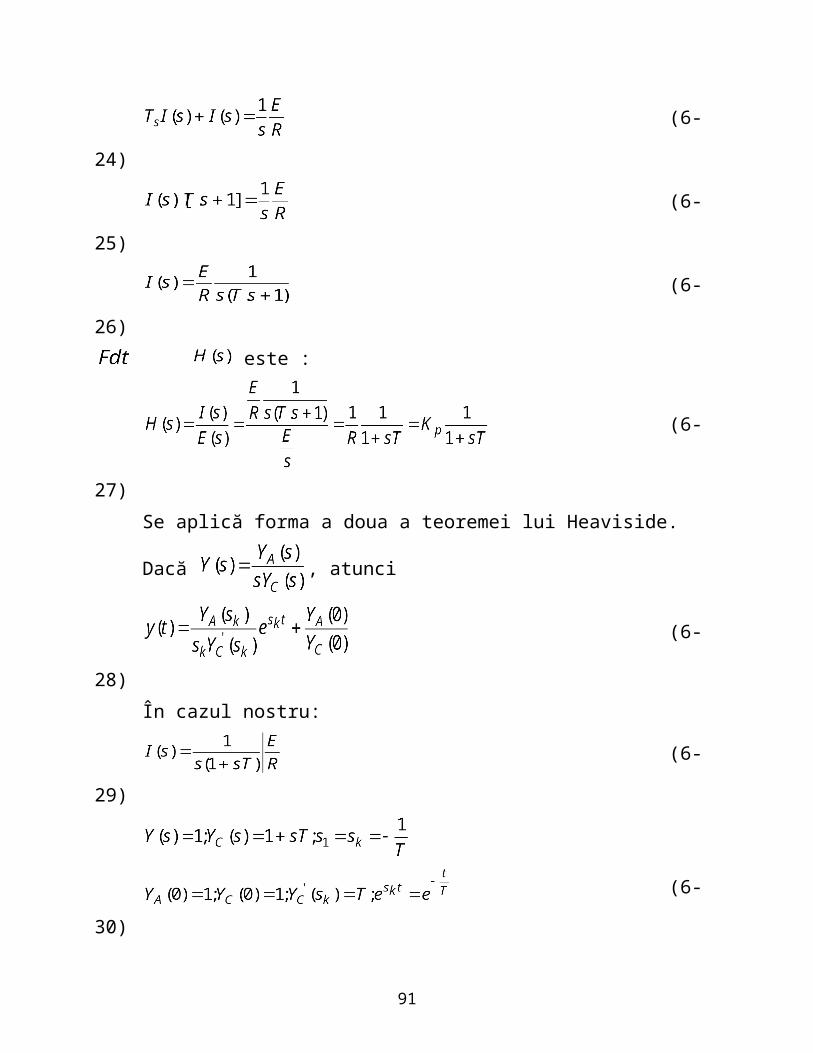
Fig. 6.21.
(6-51)
(6-52)
Fig. 6.22.
Schema electrică a releului de timp este dată în figura 6.23.
91
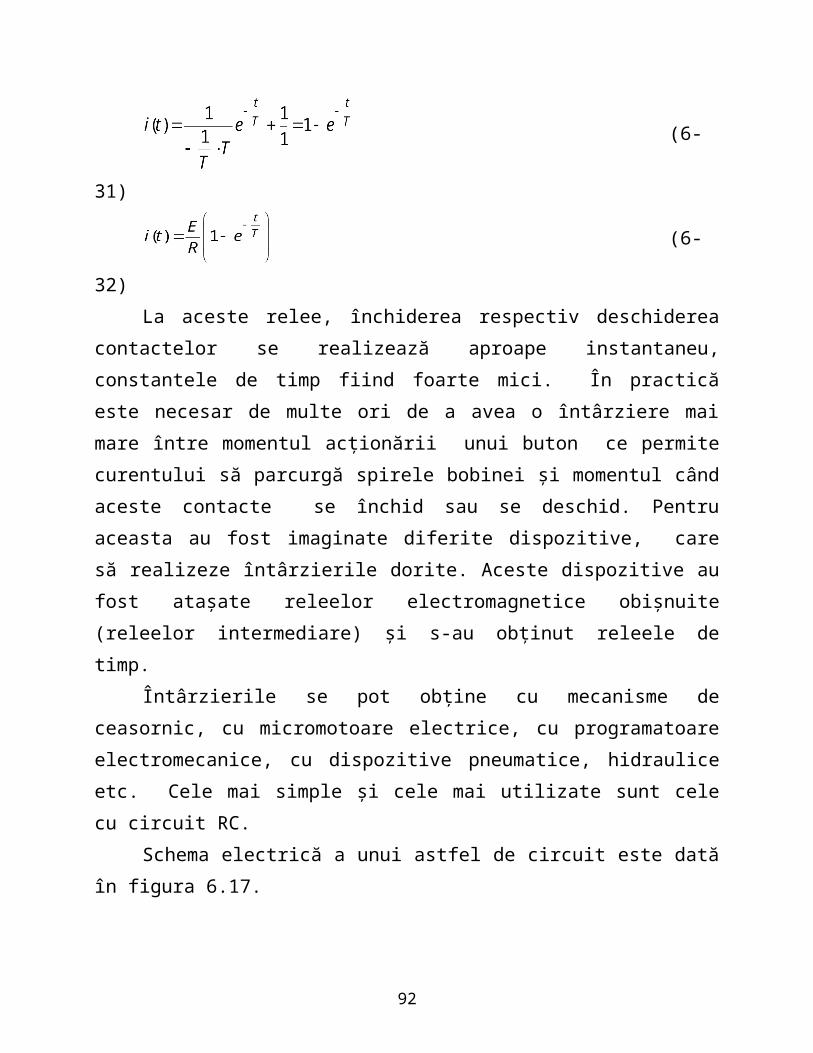
Fig. 6.23.
6.2. Convertoare
Convertoarele sunt elemente de automatizare ce realizează legătura
sistemului de reglare automată cu elementul de execuţie.
Sunt utilizate frecvent convertoare electropneumatice şi electrohidraulice.
Acestea sunt utilizate atât în automatizări în general cât şi la roboţi în special
/6.2/, /6.3/.
6.2.1. Convertoare electropneumatice
În figura 6.24 este prezentat un convertor electropneumatic curent-presiune.
Conversia este realizată în două trepte: curent-deplasare şi deplasare-
presiune.
Convertorul curent-deplasare are la bază utilizarea unui electromagnet
polarizat format din miezurile feromagnetice M1 şi M2, voletul 1 care oscilează în
jurul punctului 0 şi magneţii permanenţi 2, 3. Când voletul este pe poziţie mediană
arcul 4 este netensionat. Dacă i 0 asupra voletului acţionează numai câmpul de
polarizare produs de magneţii 2 şi 3. Cum magneţii 2 şi 3 sunt identici, fluxurile de
polarizare p sunt egale. Întreferurile 1=2=3=4 şi voletul rămâne în continuare
pe poziţia mediană. Dacă i0 voletul devine electromagnet. Fluxul produs de
curentul iI se împarte în fluxurile 1 şi 2. În întrefierul 2 va exista fluxul p şi
1. În întrefierul 2 va exista fluxul p şi 2. În întrefierul 1 va exista fluxul p
minus 2. În întrefierul 3 va exista fluxul p şi 2 iar în întrefierul 4 va exista
fluxul p şi minus 1. Corespunzător fluxurilor vor apărea forţele F1(1), F2(2),
F3(3). F4(4). Deoarece F2F1 şi F3F4, voletul şi odată cu el paleta 6 se vor roti în
sensul acelor de ceasornic cu un unghi . Variaţia unghiului este mică. Pentru
valori mici se poate considera 5.
Conversia este realizată în două trepte: curent-deplasare şi deplasare-
presiune.
92
Pc=0,2…1 barPc=0,2…1 bar
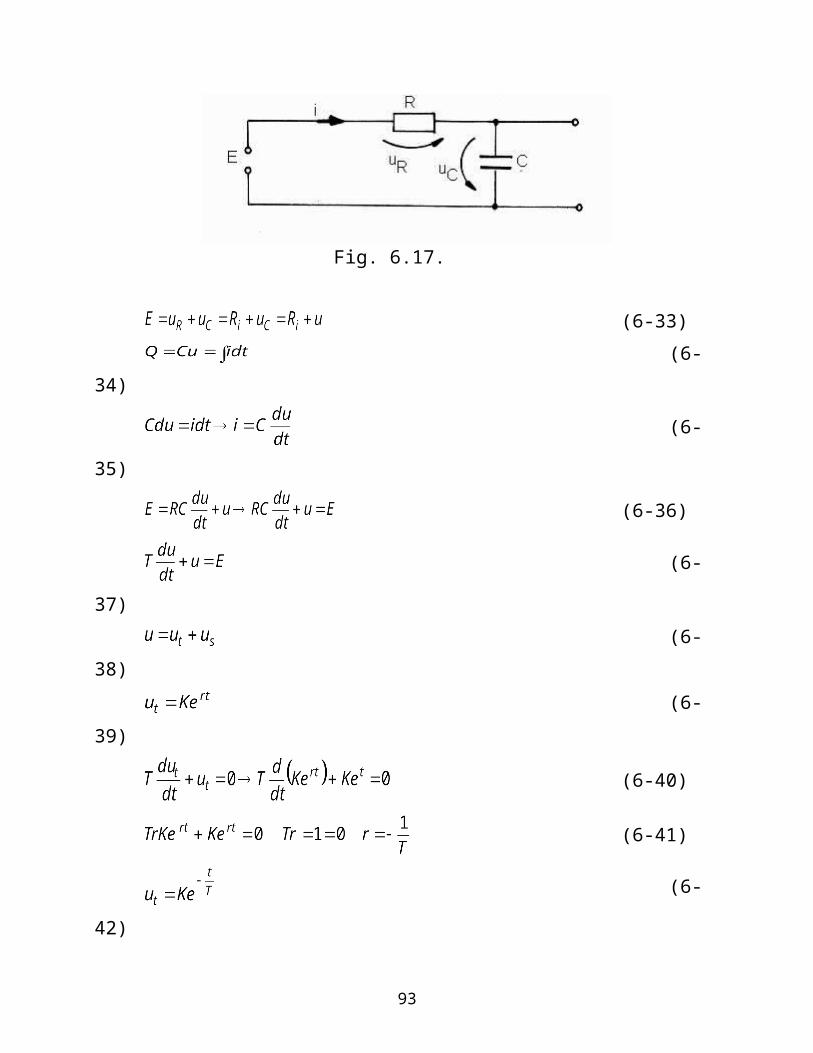
Fig. 6.24.
Convertorul curent-deplasare are la bază utilizarea unui electromagnet
polarizat format din miezurile feromagnetice M1 şi M2, voletul 1 care oscilează în
jurul punctului 0 şi magneţii permanenţi 2, 3. Când voletul este pe poziţie mediană
arcul 4 este netensionat. Dacă i 0 asupra voletului acţionează numai câmpul de
polarizare produs de magneţii 2 şi 3. Cum magneţii 2 şi 3 sunt identici, fluxurile de
polarizare p sunt egale. Întreferurile 1=2=3=4 şi voletul rămâne în continuare
pe poziţia mediană. Dacă i0 voletul devine electromagnet. Fluxul produs de
curentul iI se împarte în fluxurile 1 şi 2. În întrefierul 2 va exista fluxul p şi
1. În întrefierul 2 va exista fluxul p şi 2. În întrefierul 1 va exista fluxul p
minus 2. În întrefierul 3 va exista fluxul p şi 2 iar în întrefierul 4 va exista
fluxul p şi minus 1. Corespunzător fluxurilor vor apărea forţele F1(1), F2(2),
F3(3). F4(4). Deoarece F2F1 şi F3F4, voletul şi odată cu el paleta 6 se vor roti în
sensul acelor de ceasornic cu un unghi . Variaţia unghiului este mică. Pentru
valori mici se poate considera 5.
Acest moment activ este echilibrat de momentul rezistent creat de arcul 4.
Astfel curentul de 2…10 mA c.c. este convertit într-o deplasare unghiulară sau
93

liniară 5. S-a realizat prima treaptă de conversie curent-deplasare (i5). Sub
formă bloc acest convertor este arătat în figura 6.25.
Fig. 6.25.
Dacă voletul 1 s-a rotit spre dreapta, 5 se micşorează. Sistemul duză 5,
paleta 6 a intrat în acţiune. Micşorându-se 5 iese mai puţin aer prin duza 6 şi
creşte Pc. Când duza este închisă complet (5=0) atunci Pc=1 bar. Când duza este
deschisă complet (5=5max) Pc=0,2 bar. Duza 5 împreună cu paleta 6 acţionată de
voletul 1, lucrează ca o rezistenţă pneumatică variabilă. Droselul 7 este o rezistenţă
pneumatică fixă care asigură în elementul de comandă 8 o presiune de alimentare
egală cu 1 bar. Deci prin modificarea mărimii 5 se obţine o modificare a Pc,
realizându-se astfel a doua treaptă de conversie, respectiv deplasare-presiune
(fig.6.26).
Cum acţiunea celor două convertoare este înseriată se obţine sub formă bloc
conversia curent-presiune ca în figura 6.27.
94
i
Fig. 6.27.
Fig. 6.26.
5
La i = 2 mA c.c. corespunde Pc = 0,2
bar iar la i = 10 mA c.c. corespunde
Pc = 1 bar. Acţiunea convertorului este
proporţională.
Treapta a doua deplasare unghiulară
(liniară) – presiune, poate fi înlocuită
cu o treaptă de conversie ca cea din
figura 6.28.
În figura 6.24, voletul 1 cu paleta 6 în funcţie de i oscilează în jurul axului 0
şi produce deplasarea = 5. În figura 6.28 în funcţie de i are loc deplasarea .
Când i creşte, creşte, scade 5 şi creşte 5’. Ca urmare Pc1 la elementul de
comandă 8 creşte iar Pc2 la elementul de comandă 8’ scade. Ca efect pistonul
elementului de execuţie 9 se va deplasa de sus în jos. Când i se micşorează, scade, creşte 5 şi scade 5’. În această situaţie Pc1 scade şi Pc2 creşte. Ca urmare
pistonul elementului de execuţie 9 se va deplasa de jos în sus. Astfel s-a obţinut
conversia 5(5’) l.
6.2.2. Convertoare electrohidraulice
În figura 6.29 este prezentat un convertor electrohidraulic. În funcţie de
curentul care parcurge bobinele 1, are loc o deplasare a paletei 2 care se
materializează în modificarea distanţelor 1 respectiv 2 (pentru sistemele duză-
95
Fig. 6.28.
paletă respective). Dacă 1 = 0 uleiul cu presiunea p1 care trece prin distribuitorul 3
ajunge la orificiul 01 de unde acţionează asupra pistonului distribuitorului în sensul
de la stânga la dreapta; uleiul alimentează elementul de execuţie 4 care se va
deplasa de la stânga la dreapta. Acest convertor i –l este cunoscut şi sub
denumirea de servovalvă.
Paleta 2 are acelaşi principiu de funcţionare ca şi voletul 1 cu paleta 6 din
figura 6.24.
96
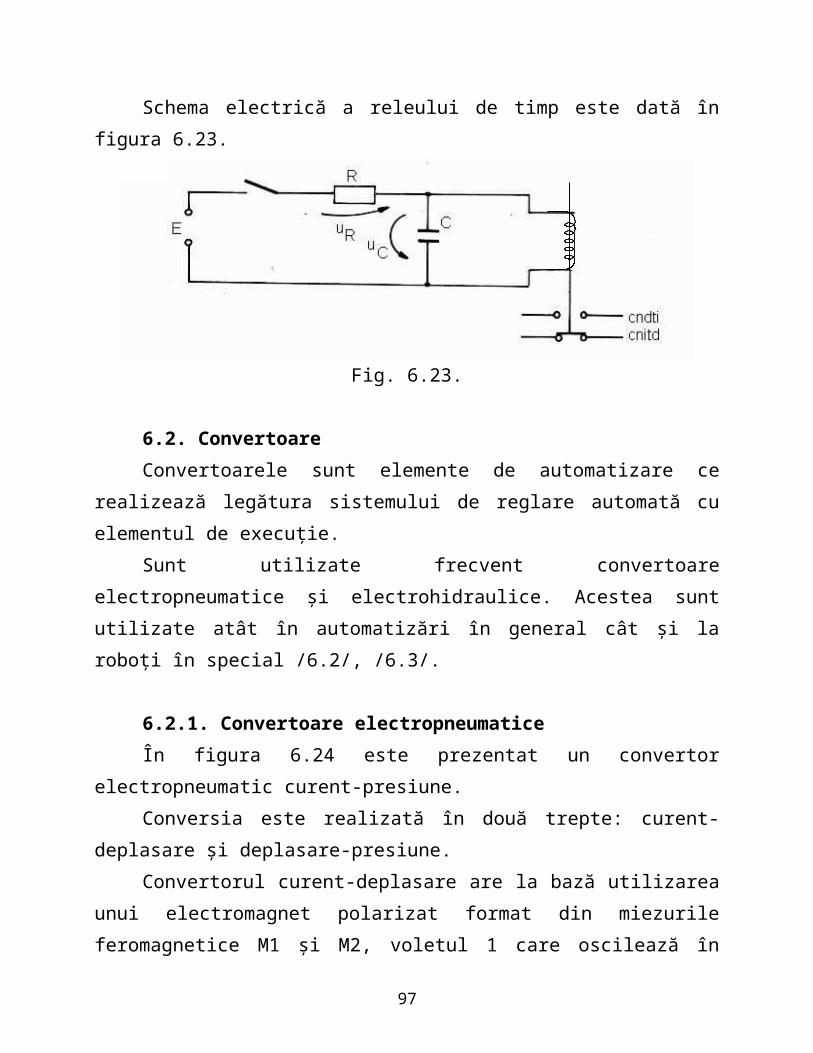
Fig. 6.29.
97