UNIVERSITATEA TEHNICĂ DE CONSTRUCŢII BUCUREŞTI
FACULTATEA DE CONSTRUCŢII CIVILE, INDUSTRIALE ŞI AGRICOLE
BUCUREŞTI
2010
CONTRIBUŢII LA MODELAREA SISTEMELOR
DINAMICE STRUCTURALE COMPLEXE
TEZĂ DE DOCTORAT
Conducător ştiinţific
Prof. univ. dr. ing. VALERIU BĂNUŢ
Doctorand
Ing. TUDOR MACAVEI
Pentru îndrumarea plină de grijă şi rigurozitate adresez sentimente de cel mai înalt respect şi recunoştinţă conducătorului ştiinţific prof. univ. dr. ing. Valeriu Bănuţ.
De asemenea, doresc să exprim sincere mulţumiri colegilor din Catedra de Mecanică, Statica şi Dinamica Construcţiilor, în special prof. univ. dr. ing. Iordan
Petrescu pentru începuturile în studiul modelării cu elemente finite, conf. univ. dr. ing. Mircea Eugen Teodorescu pentru sprijinul în domeniul calculului geometric
neliniar.
Mulţumesc prof. univ. dr. ing. Mihai Budescu şi prof. univ. dr. ing. Doina
Ştefan pentru aprecierile făcute cu promptitudine asupra prezentei teze.
Mulţumesc doamnei decan, prof. univ. dr. ing. Daniela Preda pentru
suportul acordat pe parcursul elaborării lucrării de doctorat.
În final mulţumesc familiei şi prietenilor care m-au susţinut şi încurajat
permanent.
i
CUPRINS
INTRODUCERE 1
CAPITOLUL 1.
PRINCIPALELE PROBLEME ALE MODELĂRII SISTEMELOR DINAMICE STRUCTURALE 7
1.1. Aspecte fundamentale 7
1.1.1. Sistem, model fizic, model matematic 7
1.1.2. Simplificarea modelelor matematice 7
1.1.3. Importanţa studiului modelării sistemelor dinamice structurale 8
1.2. Aspectele modelării sistemelor dinamice structurale 8
1.2.1. Introducere 8
1.2.2. Modelarea inerţială 9
1.2.3. Modelarea disipativă 11
1.2.4. Modelarea deformabilităţii 12
1.3. Probleme practice ale modelării sistemelor dinamice structurale 12
1.3.1. Principalele probleme practice ale modelării sistemelor
dinamice structurale 12
1.3.2. Delimitarea de mediul înconjurător – problemă esenţială a
modelării sistemului dinamic 13
CAPITOLUL 2.
INFLUENŢA DISTRIBUŢIEI RIGIDITĂŢILOR, MASELOR ŞI ÎNCĂRCĂRILOR DINAMICE ASUPRA MODELULUI DE CALCUL 16
2.1. Condensarea gradelor de libertate 16
2.1.1. Divizarea în submatrice a matricei de rigiditate 16
2.1.2. Condensarea consecventă 17
2.1.3. Condensarea prin transformări elementare 17
2.2. Influenţa distribuţiei rigidităţilor sistemului dinamic structural
asupra stabilirii modelului de calcul 19
2.2.1. Introducere 19
2.2.2. Sistemul dinamic structural analizat 19
2.2.3. Constatări şi comentarii 26
2.2.4. Concluzii 28
ii
2.3. Influenţa distribuţiei maselor şi încărcărilor dinamice asupra
modelului de calcul 29
2.3.1. Introducere 29
2.3.2. Sistem dinamic structural simetric, cu masa distribuită uniform 29
2.3.3. Sistem dinamic structural cu o masă disproporţionată 34
2.3.4. Influenţa încărcărilor dinamice asupra modelului de calcul 40
2.4. Concluzii 40
CAPITOLUL 3.
INFLUENŢA GRADULUI DE RAFINARE AL DISCRETIZĂRII ASUPRA RĂSPUNSULUI DINAMIC 41
3.1. Aspecte fundamentale în metoda elementelor finite 41
3.1.1. Principiul metodei elementelor finite 41
3.1.2. Clase şi tipuri de elemente finite 43
3.1.3. Funcţii de aproximare în coordonate globale 44
3.1.3.1. Generarea funcţiilor de aproximare 44
3.1.3.2. Elementul unidimensional bară 45
3.1.3.3. Elementul triunghiular liniar 47
3.1.4. Funcţii de aproximare în coordonate naturale 50
3.1.5. Elemente izoparametrice 51
3.1.6. Condiţii de convergenţă şi compatibilitate 54
3.2. Influenţa gradului de rafinare al discretizării asupra modurilor
proprii de vibraţie determinate prin calcul 55
3.2.1. Introducere 55
3.2.2. Sistemul dinamic structural P+1 56
3.2.2.1. Alcătuirea sistemului 56
3.2.2.2. Modele dinamice studiate 56
3.2.2.3. Formele proprii de vibraţie 59
3.2.2.4. Influenţa gradului de rafinare al discretizării asupra valorilor
proprii calculate 60
3.2.2.5. Concluzii 65
3.2.3. Sistemul dinamic structural P+3 68
3.2.3.1. Alcătuirea sistemului 68
3.2.3.2. Modele dinamice studiate 68
3.2.3.3. Formele proprii de vibraţie 71
3.2.3.4. Influenţa gradului de rafinare al discretizării asupra valorilor
proprii calculate 80
3.2.3.5. Concluzii 81
3.3. Influenţa gradului de rafinare al discretizării asupra răspunsului dinamic 85
3.3.1. Introducere 85
iii
3.3.2. Influenţa gradului de rafinare al discretizării asupra răspunsului
dinamic la acţiunea forţelor armonice 85
3.3.3. Influenţa gradului de rafinare al discretizării asupra răspunsului
dinamic la acţiunea seismică 86
3.3.3.1. Metoda de calcul aplicată 86
3.3.3.2. Rezultate obţinute 86
3.3.3.3. Concluzii 86
CAPITOLUL 4.
ABORDAREA TEORETICĂ A PROBLEMEI MODELĂRII SISTEMELOR DINAMICE SRUCTURALE 93
4.1. Aspecte fundamentale 93
4.1.1. Introducere 93
4.1.2. Modele geometric uniforme şi dinamic uniforme 94
4.2. O proprietate a sistemelor dinamice modelate cu elemente finite 96
4.2.1. Enunţul proprietăţii şi condiţii de aplicare 96
4.2.2. Structuri spaţiale alcătuite din elemente de tip grindă
cu secţiune constantă 98
4.3. Vibraţii longitudinale 100
4.3.1. Soluţia analitică 100
4.3.2. Soluţia cu elemente finite cu mase concentrate 101
4.3.2. Soluţia cu elemente finite cu matricea maselor „consecventă” 105
4.4. Vibraţii de torsiune 109
4.4.1. Soluţia analitică 109
4.4.2. Soluţia cu elemente finite şi caracteristici inerţiale concentrate 111
4.4.3. Soluţia cu elemente finite şi matricea inerţială „consecventă” 113
4.5. Vibraţii transversale 116
4.5.1. Soluţia analitică 116
4.5.2. Soluţia cu elemente finite cu matricea maselor „consecventă” 121
4.5.3. Soluţia cu elemente finite şi matricea maselor diagonală 129
CAPITOLUL 5.
ABORDAREA PRACTICĂ A PROBLEMEI MODELĂRII SISTEMELOR DINAMICE SRUCTURALE 134
5.1. Aspecte fundamentale 134
5.1.1. Introducere 134
5.1.2. Aspecte analizate în abordarea practică a modelării sistemelor
dinamice structurale 134
iv
5.2. Vibraţiile longitudinale ale sistemului cu legături 135
5.2.1. Soluţia analitică 135
5.2.2. Soluţia cu elemente finite şi mase concentrate 136
5.2.3. Soluţia cu elemente finite şi matricea maselor „consecventă” 137
5.3. Vibraţiile transversale ale sistemului cu legături 139
5.3.1. Soluţia analitică 139
5.3.2. Soluţia cu elemente finite şi masele concentrate 140
5.3.3. Soluţia cu elemente finite şi matricea maselor „consecventă” 141
5.4. Evaluarea erorilor pulsaţiilor proprii de vibraţie intermediare
ale sistemelor cu legături 143
5.4.1. Erorile intermediare efective 143
5.4.2. Procedeul liniar de interpolare al erorilor 144
5.4.3. Metoda polinomului de interpolare Lagrange 147
5.4.4. Procedeul funcţiei putere 151
5.5. Influenţa erorilor pulsaţiilor proprii asupra exactităţii răspunsului
dinamic la acţiuni armonice 153
5.5.1. Introducere 153
5.5.2. Răspunsul dinamic staţionar 155
5.5.3. Concluzii 158
CAPITOLUL 6.
CALCULUL DINAMIC GEOMETRIC NELINIAR 160
6.1. Introducere 160
6.1.1. Ipoteze 160
6.1.2. Specificul calculului de ordinul II 161
6.2. Principiile calculului dinamic geometric neliniar 163
6.2.1. Calculul dinamic liniar şi geometric neliniar 163
6.2.2. Ecuaţia mişcării 163
6.3. Matricea de rigiditate geometrică a barei 164
6.3.1. Bara dublu articulată 164
6.3.2. Bara dublu încastrată 165
6.4. Vibraţiile sistemului cu legături 167
6.4.1. Sistemul dinamic structural analizat 167
6.4.2. Soluţia de referinţă 168
6.4.3. Soluţia cu elemente finite şi mase concentrate 169
v
6.5. Evaluarea erorilor perioadelor proprii de vibraţie intermediare 170
6.5.1. Erorile intermediare efective 170
6.5.2. Procedeul liniar de interpolare al erorilor efective 171
6.5.3. Metoda polinomului de interpolare Lagrange 174
6.5.4. Procedeul funcţiei putere 177
6.6. Creşterea perioadei proprii fundamentale de vibraţie în funcţie
de creşterea raportului P/Pcr 180
6.7. Concluzii 181
CAPITOLUL 7.
CONSIDERAŢII FINALE 182
7.1. Contribuţii personale 182
7.2. Valorificarea lucrării şi direcţii viitoare de cercetare 183
BIBLIOGRAFIE 184
~ 1 ~
INTRODUCERE
Modelul de calcul al unui sistem structural este modelul fizic căruia i se
ataşează un model matematic. În dinamica structurilor acesta este modelul dinamic. Analiza dinamică prin calcul a unui sistem structural se referă la modelul dinamic.
Modelarea sistemelor dinamice structurale complexe – în domeniul liniar şi neliniar de comportare – este o problemă cuprinzătoare care include mai multe direcţii de cercetare. O contribuţie care se doreşte a fi semnificativă pentru rezolvarea acestei probleme trebuie să exprime principii clare şi simple de modelare matematică.
Obiectul tezei de doctorat îl reprezintă modelarea sistemelor dinamice structurale complexe în calculul dinamic liniar şi în calculul dinamic geometric neliniar. Din multitudinea aspectelor acestei probleme, unele sunt abordate în prezenta lucrare iar altele sunt propuse ca direcţii viitoare de cercetare.
Un criteriu eficient de modelare dinamică a sistemelor structurale îl reprezintă modurile proprii de vibraţie. Variaţia modurilor proprii reprezintă măsura influenţei diferiţilor factori asupra răspunsului dinamic al structurilor. Problema determinării valorilor şi vectorilor proprii de vibraţie ocupă locul central în dinamica structurilor. Modurile proprii de vibraţie caracterizează sintetic sistemul structural din punct de vedere dinamic independent de acţiunile ce se exercită asupra sa.
O proprietate remarcabilă a sistemelor dinamice uniforme libere în discretizarea cu elemente finite este că eroarea celei mai înalte pulsaţii proprii a sistemului coincide sau este apropriată cu eroarea celei mai înalte pulsaţii proprii a unui singur element finit. În afara studiului acestor sisteme libere care constituie o abordare teoretică a problemei, în prezenta lucrare este analizată această proprietate pentru sistemele cu legături şi aceasta reprezintă o abordare practică a problemei modelării sistemelor dinamice structurale. Această abordare practică este aplicată atât sistemelor dinamice structurale cu comportare liniară, cât şi sistemelor dinamice structurale cu comportare geometric neliniară. Lucrarea este structurată în o introducere, şapte capitole şi bibliografia. În „Introducere” se prezintă aspectele generale ale modelării sistemelor dinamice structurale complexe, obiectul tezei de doctorat şi o descriere succintă a conţinutului tezei de doctorat. Capitolul 1 este intitulat „Principalele probleme ale modelării sistemelor dinamice structurale” şi conţine chestiuni fundamentale, aspectele modelării sistemelor dinamice structurale şi problemele practice ale modelării sistemelor dinamice structurale.
~ 2 ~
Sunt definite noţiunile de sistem, model, model fizic, model matematic, model de calcul şi model dinamic. Sunt prezentate metode de simplificare ale modelelor matematice şi se abordează necesitatea şi importanţa studiului modelării sistemelor dinamice structurale. Ca aspecte ale modelării sistemelor dinamice structurale sunt considerate modelarea inerţială – inclusiv legătura dintre matricea maselor diagonală şi funcţiile de aproximare din metoda elementelor finite –, modelarea disipativă şi modelarea deformabilităţii. În final sunt prezentate numeroase probleme practice ale modelării sistemelor dinamice structurale, cu evidenţierea problemei delimitării de mediul înconjurător a modelului sistemului dinamic. Capitolul 2 este intitulat „Influenţa distribuţiei rigidităţilor, maselor şi încărcărilor dinamice asupra modelului de calcul” şi conţine condensarea gradelor de libertate, influenţa distribuţiei rigidităţilor sistemului dinamic structural asupra stabilirii modelului de calcul, influenţa distribuţiei maselor şi încărcărilor dinamice asupra modelului de calcul şi concluzii. În lucrare se prezintă trei procedee de condensare a gradelor de libertate. Pe baza condensării prin transformări elementare de tip Gauss – Jordan, autorul a întocmit o subrutină în MATHCAD, pe care a utilizat-o în numeroase aplicaţii numerice din teza de doctorat. Se studiază influenţa rigidităţilor disproporţionate din alcătuirea sistemelor structurale asupra comportării dinamice a acestora. Se fac comparaţii sugestive cu sistemele care au rigidităţi uniforme. Se analizează în detaliu această influenţă, atât asupra modurilor proprii joase cât şi asupra celor înalte. O contribuţie originală adusă prin acest capitol este reprezentată de introducerea factorului de amplificare dinamică pentru cuantificarea interacţiunii dintre modurile proprii de vibraţie. Astfel, pentru modurile proprii înalte pulsaţiile de vibraţie din modurile proprii joase reprezintă „pulsaţii ale acţiunii” şi factorul de amplificare dinamică este supraunitar. Pentru modurile proprii inferioare „pulsaţiile acţiunii” sunt pulsaţiile de vibraţie din modurile proprii superioare iar factorul de amplificare dinamică este subunitar. Recomandările privind modelarea sistemelor dinamice cu rigidităţi disproporţionate reprezintă o altă contribuţie adusă prin lucrarea de doctorat. Astfel, se recomandă ca părţile deosebit de flexibile ale sistemului structural să nu fie considerate în analiză. Dacă este posibil, acestea vor fi considerate ca „elemente uşoare” şi vor fi tratate separat. În caz contrar, reţeaua de elemente finite trebuie să fie îndesită în aceste zone flexibile. Printr-o abordare unitară, se pune în evidenţă faptul că aceeaşi „flexibilizare dinamică” a unei zone a structurii rezultă în urma creşterii maselor şi încărcărilor dinamice în zona respectivă. Capitolul 3 este intitulat „Influenţa gradului de rafinare al discretizării asupra răspunsului dinamic” şi conţine aspecte fundamentale în metoda
~ 3 ~
elementelor finite, influenţa gradului de rafinare al discretizării asupra modurilor proprii de vibraţie, influenţa gradului de rafinare al discretizării asupra răspunsului dinamic şi concluzii. Sunt prezentate principiul metodei elementelor finite, clase şi tipuri de elemente finite, funcţii de aproximare în coordonate globale, funcţii de aproximare în coordonate naturale, elemente izoparametrice, condiţii de convergenţă şi compatibilitate. Pentru studiul influenţei gradului de rafinare al discretizării asupra modurilor proprii de vibraţie, se efectuează două studii de caz:
sistem dinamic structural P+1 cu două deschideri şi trei travei, având două plane verticale de simetrie, unul longitudinal şi celălalt transversal;
sistem dinamic structural P+3 având de asemenea două plane de simetrie.
Pentru ambele sisteme dinamice structurale s-au adoptat patru modele dinamice:
primul model dinamic are nodurile coincidente cu nodurile efective ale structurii, rezultând: - 70 elemente finite din care 12 elemente de tip placă şi 58 elemente de
tip grindă pentru sistemul dinamic structural P+1 - 140 elemente finite pentru sistemul P+3
al doilea model dinamic se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale primului model, rezultând: - 164 elemente finite pentru sistemul P+1, din care 48 elemente de tip
placă şi 116 elemente de tip grindă - 328 elemente finite pentru sistemul P+3
al treilea model dinamic se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale modelului precedent, ceea ce a condus la: - 424 elemente finite pentru sistemul P+1 - 848 elemente finite pentru sistemul P+3
al patrulea model dinamic rezultă prin înjumătăţirea dimensiunilor elementelor finite ale modelului precedent, obţinându-se: - 1236 elemente finite pentru sistemul P+1 - 2472 elemente finite pentru sistemul P+3
S-au desprins următoarele concluzii: configuraţiile primelor 6 forme proprii de vibraţie ale sistemului P+1 şi a
primelor 10 ale sistemului P+3 nu sunt influenţate de gradul de rafinare al discretizării;
pentru aceste moduri proprii de vibraţie se repetă tripletul de forme proprii longitudinal – transversal – torsiune generală;
~ 4 ~
simetria sistemelor dinamice spaţiale permite verificarea vectorilor proprii de vibraţie obţinuţi prin calcul, nu numai calitativ dar şi cantitativ;
erorile relative ale perioadelor proprii de vibraţie scad odată cu creşterea gradului de rafinare al discretizării ;
în ansamblu, erorile relative ale perioadelor proprii cresc de la modurile proprii joase spre modurile proprii superioare.
Partea finală a capitolului este consacrată studiului influenţei gradului de
rafinare al discretizării asupra răspunsului dinamic determinat prin calcul. Acţiunea dinamică a fost reprezentată de accelerograma N – S a cutremurului din 4 martie 1977 înregistrată la INCERC – Bucureşti, durata acţiunii şi a răspunsului calculat fiind de 40 secunde.
Acceleraţia terenului a fost aplicată pe direcţia longitudinală atât a sistemului dinamic structural P+1 cât şi a sistemului dinamic structural P+3.
Sunt prezentate trei categorii de rezultate: variaţia în timp a deplasării relative faţă de poziţia nedeformată a planşeului superior, deplasările relative maxime ale fiecărui planşeu pe direcţia longitudinală şi deplasările relative de nivel maxime. Modelele dinamice mai grosiere au condus la deplasări calculate mai mici cu până la 27,8%. Acest fapt este descoperitor nu numai în cazul utilizării primului model dinamic, dar chiar şi a celui de-al doilea, care este mai rafinat. Un alt rezultat privind răspunsul dinamic – pus în evidenţă de studiile de caz efectuate – este că eroarea perioadei proprii de vibraţie se regăseşte amplificată de câteva ori în răspunsul dinamic la acţiunea seismică (eroarea perioadei proprii respective este de 5,75%).
Capitolul 4 este intitulat “Abordarea teoretică a problemei modelării
sistemelor dinamice structurale” şi conţine: aspecte fundamentale, o proprietate a sistemelor dinamice modelate cu elemente finite, vibraţii longitudinale, vibraţii de torsiune şi vibraţii transversale.
Se definesc modelele geometric uniforme şi dinamic uniforme [57]. Definiţia modelului dinamic uniform este legată de formele proprii de vibraţie. Aceste forme sunt alcătuite din porţiuni cu convexitatea în acelaşi sens. Porţiunile pot fi:
- bucle separate de puncte de inflexiune; - suprafeţe separate de linii de inflexiune; - porţiuni tridimensionale separate de suprafeţe de inflexiune.
Un model al structurii este dinamic uniform dacă fiecare porţiune de acest fel are acelaşi număr de puncte nodale ale reţelei de elemente finite.
Se prezintă o proprietate a erorii celei mai înalte pulsaţii proprii a sistemelor dinamice uniforme modelate cu elemente finite. Această eroare poate fi obţinută înaintea efectuării oricărei analize dinamice. Enunţul proprietăţii:
~ 5 ~
Eroarea celei mai înalte pulsaţii proprii a unui sistem dinamic uniform liber în discretizarea cu elemente finite coincide cu eroarea celei mai înalte
pulsaţii proprii a unui singur element finit. În literatura de specialitate [34] proprietatea este demonstrată pentru
vibraţiile longitudinale cu mase concentrate ale sistemului uniform de elemente articulate. În lucrarea de doctorat proprietatea este demonstrată pentru:
vibraţiile longitudinale cu matricea maselor “consecventă”; vibraţiile de torsiune cu caracteristici inerţiale concentrate; vibraţiile de torsiune cu matricea inerţială “consecventă”.
De asemenea, această proprietate este studiată pentru vibraţiile transversale
cu matricea maselor “consecventă” şi diagonală. În toate cazurile abordate, comparaţia a fost făcută cu soluţia analitică a
sistemului liber continuu. Capitolul 5 este intitulat „ Abordarea practică a problemei modelării
sistemelor dinamice structurale” şi conţine: aspecte fundamentale, vibraţiile longitudinale ale sistemului cu legături, vibraţiile transversale ale sistemului cu legături, evaluarea erorilor pulsaţiilor proprii de vibraţie intermediare ale sistemelor cu legături, influenţa erorilor pulsaţiilor proprii asupra exactităţii răspunsului dinamic la acţiuni armonice.
Sunt analizate următoarele vibraţii ale sistemelor cu legături prin prisma proprietăţii enunţate a pulsaţiilor proprii de vibraţie:
vibraţii longitudinale, soluţia cu elemente finite şi mase concentrate; vibraţii longitudinale, soluţia cu elemente finite şi matricea maselor
„consecventă”; vibraţii transversale, soluţia cu elemente finite şi matricea maselor
„consecventă”; vibraţii transversale, soluţia cu elemente finite şi matricea maselor
diagonală.
De asemenea, în acest capitol sunt studiate următoarele probleme practice: evaluarea erorilor pulsaţiilor proprii intermediare ale sistemelor cu
legături prin interpolare liniară; evaluarea erorilor pulsaţiilor proprii intermediare ale sistemelor cu
legături prin metoda polinomului de interpolare Lagrange; evaluarea erorilor pulsaţiilor proprii intermediare ale sistemelor cu
legături prin procedeul funcţiei putere.
S-a analizat amplificarea erorilor pulsaţiilor proprii în răspunsul dinamic al sistemelor structurale la acţiuni armonice. Studiul efectuat reprezintă o sinteză din literatura de specialitate, fiind prezentată acurateţea răspunsului dinamic staţionar
~ 6 ~
pentru mai multe fracţiuni din amortizarea critică şi mai multe erori ale pulsaţiilor proprii de vibraţie.
Pentru raportul dintre pulsaţia acţiunii şi pulsaţia proprie egal cu zero, factorul de amplificare al erorilor este egal cu 2. Se face deosebire între zona
rezonanţei adică intervalul raportului pulsaţiilor cuprins între 0,8 şi 1,2 şi vecinătatea rezonanţei în care raportul celor două pulsaţii este aproximativ egal cu unitatea.
În vecinătatea rezonanţei amplificarea erorii pulsaţiei proprii în răspunsul dinamic este nulă, iar amplificarea maximă a erorii are loc în zona rezonanţei şi este aproximativ egală cu coeficientul dinamic (factorul de amplificare dinamică).
Eroarea maximă a componentei tranzitorii a răspunsului dinamic este aproximativ egală cu eroarea maximă a răspunsului dinamic staţionar.
Capitolul 6 este intitulat „Calculul dinamic geometric neliniar” şi
cuprinde ipotezele simplificatoare adoptate, specificul calculului de ordinul II, principiile calculului dinamic geometric neliniar, matricea de rigiditate geometrică a barei, vibraţiile sistemului cu legături, evaluarea erorilor perioadelor proprii de vibraţie intermediare, creşterea perioadei proprii fundamentale de vibraţie în funcţie de creşterea raportului P/Pcr şi concluzii.
În calculul dinamic geometric neliniar au fost parcurse etapele de studiu din calculul dinamic liniar. În funcţie de diferite rapoarte P/Pcr , s-au determinat erorile perioadelor proprii de vibraţie. Pentru interpolarea erorilor acestora s-au utilizat următoarele procedee:
procedeul liniar de interpolare; metoda polinomului de interpolare Lagrange; procedeul funcţiei putere.
În calculul dinamic geometric neliniar, aceste procedee se aplică într-un
mod diferit faţă de calculul dinamic liniar, datorită mai ales modificării semnificative a perioadei proprii fundamentale de vibraţie.
Au fost propuse expresii adecvate comportării dinamice geometric neliniare atât în procedeul liniar, cât şi în procedeul funcţiei putere şi în metoda polinomului de interpolare Lagrange.
Creşterea perioadei proprii fundamentale de vibraţie implică scăderea accentuată a rigidităţii structurii odată cu creşterea raportului P/Pcr.
În acest capitol se generalizează studiul comportării dinamice geometric neliniare de la modul propriu fundamental de vibraţie la toate modurile proprii de vibraţie ale modelului dinamic analizat.
Capitolul 7 este intitulat „Consideraţii finale” şi cuprinde contribuţii
personale, valorificarea lucrării şi direcţii viitoare de cercetare. Bibliografia conţine 59 de titluri.
~ 7 ~
CAPITOLUL 1
PRINCIPALELE PROBLEME ALE MODELĂRII SISTEMELOR DINAMICE STRUCTURALE
1.1. ASPECTE FUNDAMENTALE
1.1.1. Sistem, model fizic, model matematic
Sistemul este un ansamblu de elemente componente, caracterizat printr-o structură internă ordonată şi delimitat de mediul înconjurător.
Modelul este o reprezentare a aspectelor esenţiale ale unui sistem. Modelul permite descrierea cunoştinţelor asupra sistemului într-o formă utilizabilă.
Modelul fizic este o copie sau o analogie care se comportă similar cu sistemul real. Modelul fizic rezultă în urma aplicării unor simplificări.
Modelul matematic este un sistem de relaţii matematice care descriu comportarea unui sistem fizic real. Modelul matematic poate fi construit pe modelul fizic.
Modelul de calcul al structurii este modelul fizic căruia i se ataşeaza un model matematic. În Dinamica structurilor acesta este modelul dinamic.
Analiza prin calcul la acţiunea dinamică a unei structuri se referă la modelul dinamic şi nu la sistemul dinamic real [35].
1.1.2. Simplificarea modelelor matematice
Utilizarea modelelor dinamice complexe are mai multe dezavantaje legate de costul analizei, memoria necesară, mânuirea datelor de intrare, interpretarea rezultatelor şi efectul nefavorabil al erorilor de rotunjire şi trunchiere.
Pe de altă parte, utilizarea celor mai mici dimensiuni pentru modelele dinamice poate conduce la rezultate incorecte şi, mai mult, se poate pierde evidenţierea anumitor fenomene.
Simplificarea modelelor matematice se realizează prin : reducerea dimensiunii modelului; concentrarea caracteristicilor distribuite, din ecuaţiile diferenţiale cu
derivate parţiale obţinându-se în acest fel sisteme de ecuaţii diferenţiale ordinare;
neglijarea variabilitaţii în timp a unor parametri; liniarizarea relaţiilor acţiune-răspuns, din ecuaţiile diferenţiale neliniare,
obţinându-se ecuaţii diferenţiale liniare.
~ 8 ~
1.1.3. Importanţa studiului modelării sistemelor dinamice structurale
Modelarea specifică sistemelor dinamice este o problemă esenţială în realizarea sistemelor structurale. Principalele etape în realizarea acestor tipuri de sisteme sunt:
concepţia sistemului dinamic; modelarea sistemului dinamic; analiza şi proiectarea; execuţia; investigarea experimentală a sistemului dinamic.
După modelarea şi analiza sistemului dinamic se poate ajunge la concluzia că
este necesară revizuirea concepţiei acestui sistem. Toate construcţiile reprezintă sisteme dinamice. Sistemele structurale sunt
supuse acţiunilor dinamice care provin din procese tehnologice industriale, seisme naturale sau artificiale, rafale de vânt, mijloace de transport etc.
Toţi parametrii care intervin trebuie modelaţi în aşa fel încât fenomenele care au loc în sistemul structural să poată fi reflectate si evaluate cât mai fidel. Totodată, prin modelare trebuie să se ofere posibilitatea ca fenomenele dinamice să fie abordate satisfăcător din punct de vedere matematic. O alterare a caracteristicilor de definire ale sistemului dinamic poate conduce nu numai la rezultate inexacte, ci chiar la falsificarea fenomenelor reale.
Necesitatea studiului mai rezultă din: complexitatea problemei dinamice în raport cu problema statică, ţinând
seama de datele de intrare, performanţele calculatorului şi datele de ieşire;
avantajele deosebite ale modelelor simplificate de analiză faţă de modelele extinse ale sistemelor dinamice;
gama largă de dimensiuni posibile ale modelului dinamic între modelele simplificate şi cele deosebit de complexe.
1.2. ASPECTELE MODELĂRII SISTEMELOR DINAMICE
STRUCTURALE
1.2.1. Introducere
În analiza dinamică a structurilor se modelează sistemul şi acţiunile, şi se determină răspunsul dinamic.
Modelarea sistemului dinamic se referă la următoarele trei aspecte principale: modelarea inerţială; modelarea disipativă; modelarea deformabilităţii.

~ 9 ~
1.2.2. Modelarea inerţială Modelarea inerţială se referă la distribuţia maselor, care matematic se reflectă
în matricea maselor. Cel mai simplu mod de definire a proprietăţilor inerţiale ale oricărei structuri
este acela de a presupune că întreaga masă este concentrată în puncte unde sunt definite deplasări din translaţie. Procedura uzuală de definire a punctelor cu masa localizată în fiecare nod este de a presupune ca întreaga structură este împărţită în elemente, nodurile servind drept puncte de conexiune.
Pentru o structură în care sunt definite doar grade de libertate de translaţie, matricea maselor concentrate are în general o formă diagonală
nn
ii
m
m
m
m
M
KK
KKKKKK
KK
KKKKKK
KK
KK
000
000
000
000
][
22
11
în care sunt atâtea elemente câte grade de libertate are sistemul dinamic. Elementele nediagonale mij ale acestei matrice sunt nule deoarece o acceleraţie a oricărei mase produce o forţă de inerţie doar în acel punct.
Dacă pentru un punct specificăm mai mult de un grad de libertate de translaţie, masa aceluiaşi punct va fi asociată fiecărui grad de libertate. Pe de altă parte, masa asociată oricărui grad de libertate de rotaţie va fi zero din cauza presupunerii că masa este concentrată în puncte fără inerţie de rotaţie. Drept urmare, matricea maselor concentrate este o matrice diagonală care va include elemente zero pe diagonală pentru grade de libertate de rotaţie, în general.
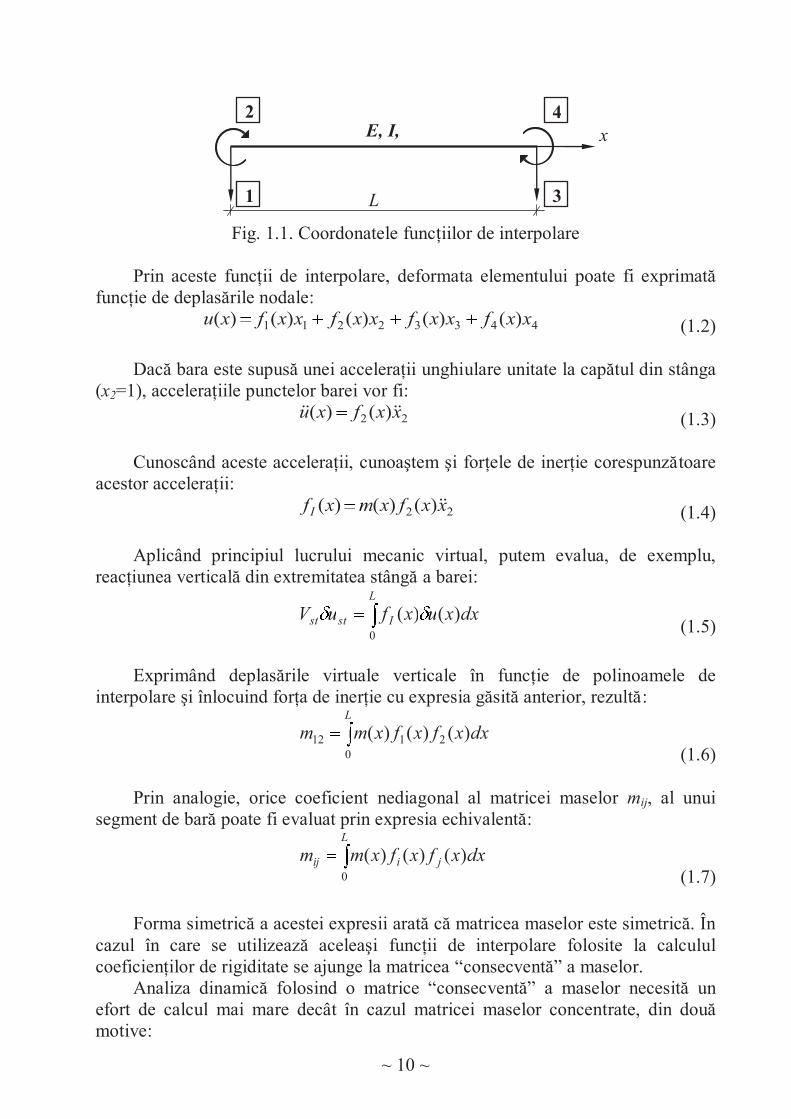
Al doilea mod de definire a proprietăţilor masice se realizează printr-un procedeu similar cu analiza elementelor matricei de rigiditate. Acest mod de definire conduce la matricea “consecventă” a maselor. Se consideră de exemplu o grindă în plan, gradele de libertate fiind translaţiile (x1,x3) si rotirile (x2,x4) extremităţilor acestei grinzi; considerăm de asemenea că deplasările punctelor barei sunt definite de aceleaşi funcţii de interpolare fi(x) utilizate la deducerea rigidităţii elementelor.
Aceste funcţii de interpolare sunt:
2
2
32
1
1)(
231)(
2
111
3
22
31
L
xxxf
L
x
L
xxf
L
x
L
xxf
L
x
L
xxf
1)(
23)(
2
4
32
3
(1.1)
~ 10 ~
Fig. 1.1. Coordonatele funcţiilor de interpolare
Prin aceste funcţii de interpolare, deformata elementului poate fi exprimată funcţie de deplasările nodale:
44332211 )()()()()( xxfxxfxxfxxfxu ffff (1.2)
Dacă bara este supusă unei acceleraţii unghiulare unitate la capătul din stânga (x2=1), acceleraţiile punctelor barei vor fi:
22 )()( xxfxu &&&& f (1.3)
Cunoscând aceste acceleraţii, cunoaştem şi forţele de inerţie corespunzătoare acestor acceleraţii:
22 )()()( xxfxmxf I &&m (1.4)
Aplicând principiul lucrului mecanic virtual, putem evalua, de exemplu, reacţiunea verticală din extremitatea stângă a barei:
L
Istst dxxuxfuV0
)()( usu (1.5)
Exprimând deplasările virtuale verticale în funcţie de polinoamele de
interpolare şi înlocuind forţa de inerţie cu expresia găsită anterior, rezultă: L
dxxfxfxmm0
2112 )()()( (1.6)
Prin analogie, orice coeficient nediagonal al matricei maselor mij, al unui
segment de bară poate fi evaluat prin expresia echivalentă: L
jiij dxxfxfxmm0
)()()( (1.7)
Forma simetrică a acestei expresii arată că matricea maselor este simetrică. În
cazul în care se utilizează aceleaşi funcţii de interpolare folosite la calculul coeficienţilor de rigiditate se ajunge la matricea “consecventă” a maselor.
Analiza dinamică folosind o matrice “consecventă” a maselor necesită un efort de calcul mai mare decât în cazul matricei maselor concentrate, din două motive:
x
1
2 E, I,
L 3
4
~ 11 ~
a) prezenţa multor termeni nediagonali (cuplarea maselor) la folosirea matricei “consecvente”;
b) gradele de libertate rotaţii pot fi eliminate într-o analiză cu mase concentrate (prin procedeul de condensare statică).
După ce au fost determinaţi coeficienţii submatricelor maselor ale elementelor structurii, matricea maselor întregului ansamblu poate fi găsită prin exact acelaşi procedeu de suprapunere precum cel utilizat pentru determinarea matricei de rigiditate. Matricea maselor va avea aceeaşi configuraţie, adică aceleaşi poziţii ale coeficienţilor nenuli, ca şi matricea de rigiditate.
Sunt de precizat două observaţii:
1. În cazul în care se utilizează o matrice diagonală a maselor, masele structurii pot fi concentrate numai în anumite puncte nodale, situaţie în care numărul elementelor nule de pe diagonala matricei [M] creşte.
2. În cazul în care masele se concentrează în nodurile structurii şi se adoptă ipoteza deformaţiilor axiale nule ale barelor, pot exista elemente secundare nenule ale matricei [M], (mij ≠ 0, pentru i ≠ j) dacă gradele de libertate antrenează mase concentrate comune.
1.2.3. Modelarea disipativă
Energia indusă de acţiunile dinamice este disipată de sistemele dinamice structurale prin fenomenul de amortizare.
Amortizarea depinde în general de: - capacitatea de amortizare interna a materialului; - configuraţia structurii şi gradul de nedeterminare statică; - legăturile exterioare şi interioare ale sistemului structural.
În cazul amortizării vâscoase, matricea de amortizare [C] poate fi considerată o combinaţie liniară a matricelor de inerţie şi de rigiditate:
][][][ KMCg
[Kţ[M (1.8)
unde şi sunt constante care se determină pe baza cunoaşterii fracţiunilor din amortizările critice modale νi şi νj care corespund pulsaţiilor proprii ωi şi ωj.
Relaţia 1
0
1 ])[]([][][p
i
ii KMaMC
(1.9) generalizeaza expresia precedentă pentru p fracţiuni νi (i = 1,2,…, p).
~ 12 ~
1.2.4. Modelarea deformabilităţii
Modelarea deformabilităţii sistemului dinamic structural se referă la evaluarea proprietăţilor de rigiditate. În cazul sistemelor cu comportare elastică liniară, coeficienţii de rigiditate sunt constanţi, pe când în situaţia sistemelor cu comportare neliniară, aceşti coeficienţi sunt variabili.
Modelarea deformabilităţii sistemului dinamic structural include şi discretizarea în elementele componente, precizarea geometriei acestora, precum şi a legăturilor interioare si exterioare ale sistemului.
O trăsătură comună tuturor sistemelor discretizate în elemente finite este numărul mare de coeficienţi nuli din matricea de rigiditate. Aceasta se datorează faptului că fiecare nod are puţine elemente comune cu alte noduri. Cu cât structura este mai dezvoltată, cu atât procentul de coeficienţi nuli este mai mare. Memorarea ei se poate face în formă compactă, ceea ce permite , pe lânga memorarea unor matrice de dimensiuni mari, evitarea operaţiilor care implică zerouri. 1.3. PROBLEME PRACTICE ALE MODELĂRII SISTEMELOR
DINAMICE STRUCTURALE
1.3.1. Principalele probleme practice ale modelării sistemelor dinamice structurale
În raport cu aspectele fundamentale ale modelării sistemelor dinamice structurale, se ridică – printre altele – următoarele probleme practice:
1. Delimitarea modelului sistemului dinamic de mediul înconjurător. De
exemplu, în practica inginerească se întâlnesc ansambluri secundare “uşoare” asociate unor sisteme structurale primare. Delimitarea ansamblurilor secundare de structura primară se încadreaza în acest gen de probleme.
2. Stabilirea dimensiunii modelului dinamic. 3. Posibilitatea decuplării anumitor subsisteme din sistemul dinamic. 4. Posibilitatea izolării anumitor elemente din sistem, pentru a fi analizate
separat. 5. Opţiunea între noduri principale şi axe de coordonate principale. În particular,
aceasta se referă la condensarea matricei de rigiditate. 6. Identificarea situaţiilor în care este posibilă modelarea sistemului dinamic
structural spaţial ca un sistem plan. 7. Stabilirea raportului dintre modelul plan şi modelul spaţial al sistemului
dinamic structural. 8. Stabilirea gradului de acurateţe al analizei care se justifică în cazul alegerii
unui model plan. 9. Influenţa neglijării anumitor deformaţii asupra rezultatelor analizei dinamice. 10. Studiul posibilităţii concentrării maselor sistemului dinamic structural. 11. Opţiunea între o matrice diagonală a maselor şi o matrice “consecventă”.
~ 13 ~
12. Opţiunea între o analiză dinamică liniară şi considerarea comportării neliniare a sistemului structural.
13. Alegerea curbei histeretice în cazul analizei neliniare. 14. Opţiunea între modele aleatoare şi deterministe în analiza sistemelor dinamice
structurale. 15. Modelarea sistemelor dinamice cu rigidităţi disproporţionate. 16. Modelarea sistemelor dinamice cu mase disproporţionate. 17. Investigarea posibilităţii obţinerii unor rezultate cu acurateţe ridicată utilizând
modele dinamice reduse. 18. Analiza erorilor în cazul utilizării modelelor simplificate. 19. Aprecierea cumulării erorilor de rotunjire şi trunchiere în analiza dinamică a
sistemelor pentru care s-au realizat modele complexe. 20. Stabilirea criteriilor de modelare a sistemelor dinamice. 21. Verificarea experimentală a criteriilor de modelare.
1.3.2. Delimitarea de mediul înconjurător – problemă esenţială a modelării sistemului dinamic
Problema delimitării modelului sistemului structural de mediul înconjurător are un domeniu de aplicare mult mai divers decât s-ar putea considera la prima vedere. Printre altele, această problemă se referă la :
- delimitarea ansamblurilor secundare de structura suport; - decuplarea anumitor subsisteme din sistemul dinamic; - izolarea anumitor elemente din sistem, pentru a fi analizate separat; - includerea în analiză a anumitor elemente considerate “nestructurale”; - adoptarea unor modele plane pentru sistemul dinamic structural.
În cele ce urmează, se studiază posibilitatea izolării unui element din sistemul
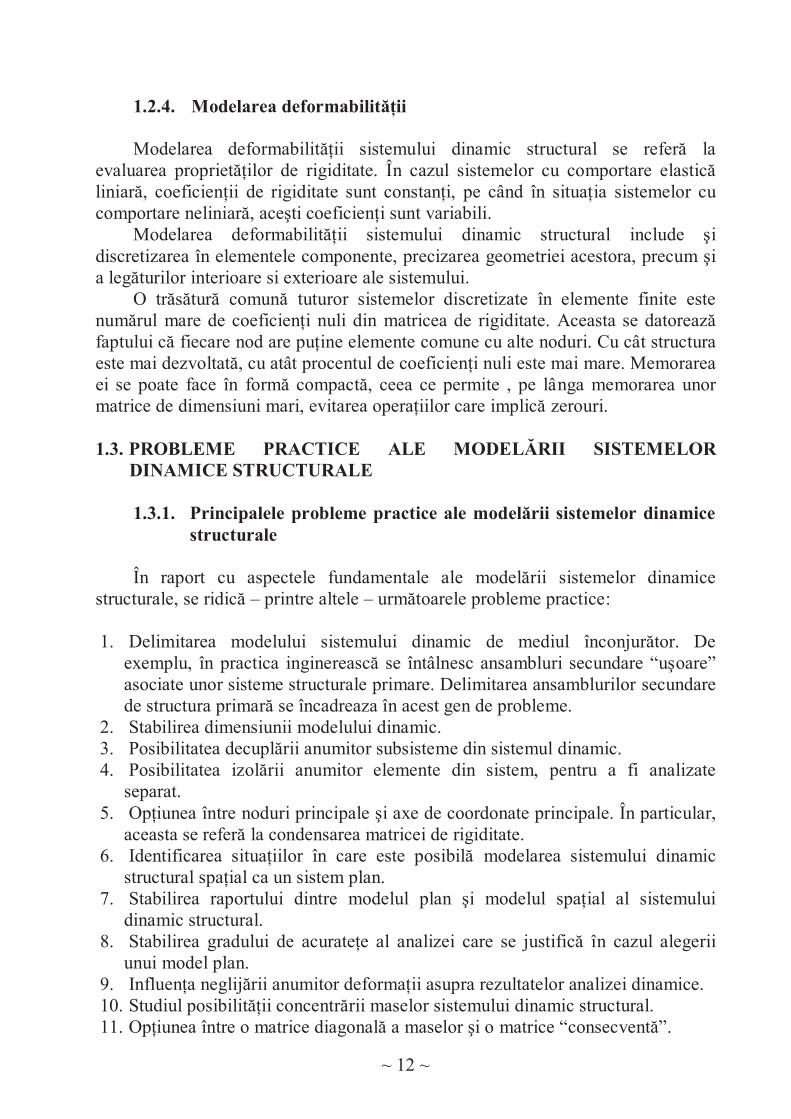
dinamic, printr-un exemplu simplu. În figura 1.2 s-a reprezentat un sistem dinamic alcătuit dintr-un stâlp şi o
riglă, sistemul având doua mase concentrate: mm 31 3 , mm m2
Fig. 1.2. Sistemul dinamic structural
l/2
l/2
2I 2I
l l
m1
m2
1
I
I 2
~ 14 ~
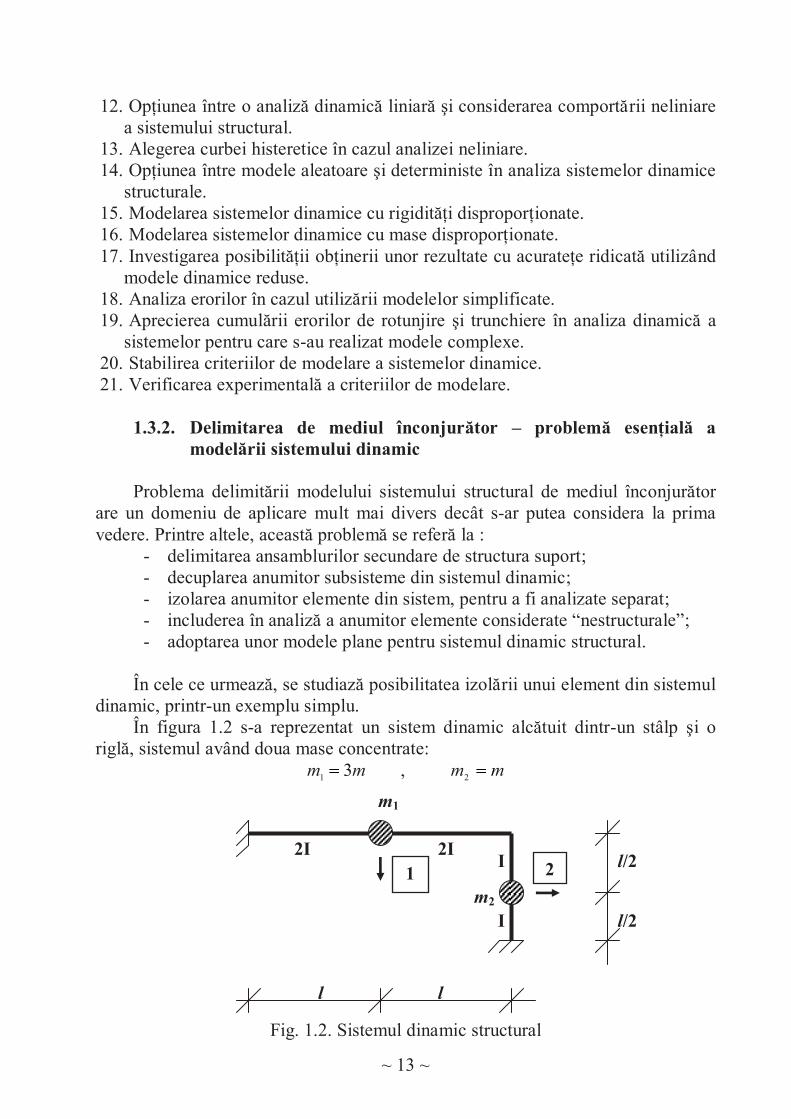
Se analizează posibilitatea izolării riglei din sistemul dinamic structural, prin cuprinderea între două situaţii limită:
- rigla cu o încastrare si un reazem simplu (figura 1.3, a); - rigla dublu încastrată (figura 1.3,b).
Fig. 1.3. Situaţii limită ale elementului izolat
Aceste situaţii limită rezultă intuitiv: stâlpul îi asigură riglei un anumit grad de încastrare la extremitatea din dreapta. Pulsaţiile proprii de vibraţie ale sistemului dinamic structural se noteaza cu
11 si 22 , pulsaţia proprie a riglei cu o încastrare şi un reazem simplu cu 1~
1~ , iar
pulsaţia proprie a riglei dublu încastrate cu 2~
2~ .
În urma calculelor efectuate, s-au obţinut:
3232
3131
4~3235,12
0237,3~3998,3
ml
EI
ml
EI
ml
EI
ml
EI
41
33
2~
2
1~
1
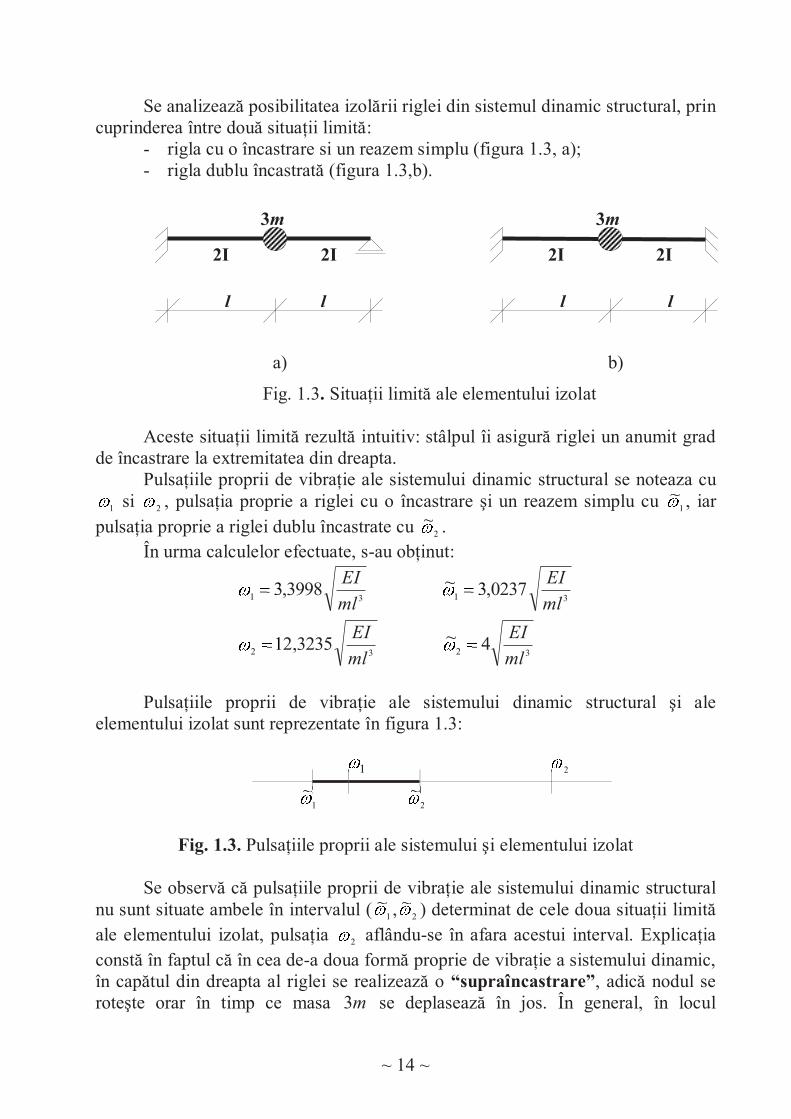
Pulsaţiile proprii de vibraţie ale sistemului dinamic structural şi ale elementului izolat sunt reprezentate în figura 1.3:
Fig. 1.3. Pulsaţiile proprii ale sistemului şi elementului izolat
Se observă că pulsaţiile proprii de vibraţie ale sistemului dinamic structural nu sunt situate ambele în intervalul ( 1
~1
~ , 2~
2~ ) determinat de cele doua situaţii limită
ale elementului izolat, pulsaţia 22 aflându-se în afara acestui interval. Explicaţia constă în faptul că în cea de-a doua formă proprie de vibraţie a sistemului dinamic, în capătul din dreapta al riglei se realizează o “supraîncastrare”, adică nodul se roteşte orar în timp ce masa m3 se deplasează în jos. În general, în locul
11
22
1~
1~~
2~
2~
a) b)
2I 2I 2I 2I
l l l l
3m 3m

~ 15 ~
articulaţiei poate exista o “subarticulare”. Situaţiile limită din Statica construcţiilor nu pot fi aplicate în Dinamica structurilor. Această constatare este importantă, printre altele, la studiul plăcilor care se izolează din sistemul dinamic structural.
~ 16 ~
CAPITOLUL 2
INFLUENŢA DISTRIBUŢIEI RIGIDITĂŢILOR, MASELOR ŞI ÎNCĂRCĂRILOR DINAMICE ASUPRA MODELULUI DE CALCUL 2.1. CONDENSAREA GRADELOR DE LIBERTATE
Dintre problemele practice ale modelării sistemelor dinamice structurale, în
acest capitol se analizează cele legate de influenţa distribuţiei rigidităţilor, maselor şi încărcărilor dinamice asupra modelului matematic al sistemului dinamic structural, model care să fie utilizat pentru calculul răspunsului dinamic la diferite acţiuni, inclusiv acţiunea seismică. De asemenea, se prezintă şi alte aspecte ale modelării inerţiale şi ale deformabilităţii structurilor. În vederea efectuării aplicaţiilor numerice, se condensează gradele de libertate ale sistemului dinamic structural.
2.1.1. Divizarea în submatrice a matricei de rigiditate
Prin condensare, matricea de rigiditate [K], exprimată în coordonatele totale,
se reduce la matricea de rigiditate [R], exprimată în coordonatele dinamice, adică acele coordonate pe direcţiile cărora, prin modelul de calcul adoptat, se pot dezvolta forţe de inerţie.
Se notează cu indicii: e = coordonatele care se elimină; d = coordonatele care se păstrează în analiza dinamică. Sistemul ecuaţiilor de echilibru static, exprimate prin egalitatea forţelor,
devine:
dd
e
ddde
edee
FKK
KK
}{
}0{
}{
}{
][][
][][ (2.1)
unde }{}{ x
d{}
d (2.2)
sunt coordonatele dinamice (deplasări). Prin identificare cu sistemul redus de ecuaţii
}{}]{[ FxR { (2.3) unde
}{}{ FFd
{ (2.4)
se obţine expresia matricei de rigiditate dinamică [R]:
edeededd
KKKKR ][][][][][ 11K[K[ (2.5)
~ 17 ~
2.1.2. Condensarea consecventă
Operaţiile din relaţia (2.5) pot fi obţinute prin transformare de coordonate:
][][][][ AKART[ (2.6)
ceea ce permite operarea simultană asupra matricei maselor, [M], utilizând o expresie similară celei din relaţia (2.6) şi aceeaşi matrice de transformare [A]. Matricea [A] are alcătuirea:
][
][][
I
EA (2.7)
unde
edeeKKE ][][][ 11
K[ (2.8) iar [I] este matricea unitate. Obţinerea relaţiei (2.5) din relaţia (2.6) poate fi verificată direct. 2.1.3. Condensarea prin transformări elementare
eeK ][
edK ][
Matricea iniţială ][K
deK ][
ddK ][
………………………………. operaţii elementare
asupra liniilor
1
1
1
Ozero
zero ][E
Matricea finală ][R
zero ][R
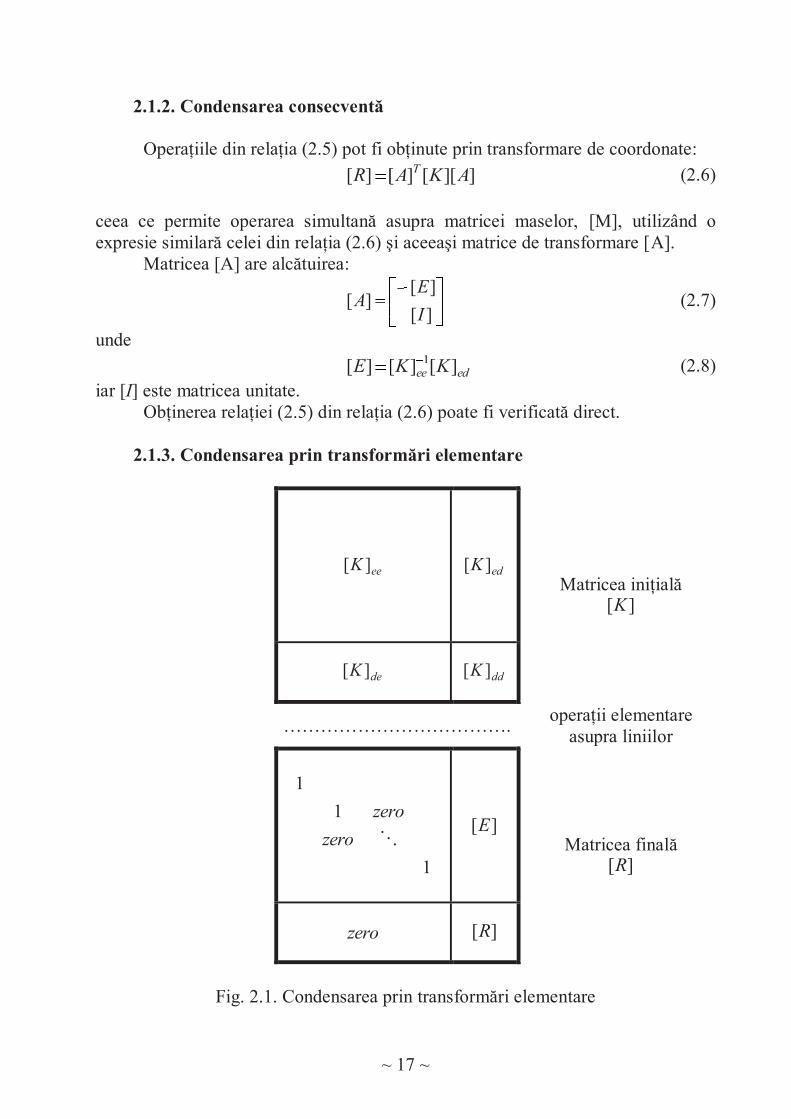
Fig. 2.1. Condensarea prin transformări elementare

~ 18 ~
Matricea de rigiditate [R] poate fi obţinută din matricea de rigiditate [K] prin transformări elementare de tip Gauss – Jordan efectuate asupra liniilor, aşa cum se arată în figura 2.1. Se efectuează transformări de tip Gauss – Jordan până când în locul submatricei [K]ee se obţine matricea unitate, iar în locul submatricei [K]de se obţine submatricea nulă. Atunci, în poziţia submatricei [K]dd se va afla matricea [R], aşa cum rezultă prin compararea sistemului de ecuaţii (2.1) cu configuraţia finală a matricei [K] din figura 2.1. În plus, în locul submatricei [K]ed din figura 2.1 se obţine submatricea [E] care permite revenirea la coordonatele eliminate:
de
E }{][}{d
}E[e
} (2.9) Subrutina în MATHCAD, întocmită de autor pentru aplicaţiile numerice este următoarea:
În această subrutină s-au utilizat următoarele notaţii: S – matricea de rigiditate [K];
NE – numărul coordonatelor care se elimină, “e”. În subrutină NE este cu o unitate mai mic decât numărul acestor coordonate;
ND – numărul coordonatelor dinamice, “d”.
S
R submatrix SK NE 11N NTN NE 11N NTN( )s
SK NE 99
ND 1010
NT NE NDNNE
SK SS
pivot SKk kk
SK
SKk jj
SKk jj
pivotpSK
j k NTkfor
SKi kk
SKi kk
SK i kif
AJ SKi kk
SK
SKi jj
SKi jj
AJ SKk jj
SASK
j k NTkfor
otherwise
i 0 NT0for
k 0 NE0for
SKreturn
~ 19 ~
2.2. INFLUENŢA DISTRIBUŢIEI RIGIDITĂŢILOR SISTEMULUI DINAMIC STRUCTURAL ASUPRA STABILIRII MODELULUI DE
CALCUL 2.2.1. Introducere
Se analizează modelarea sistemelor dinamice structurale alcătuite din elemente având diferite rigidităţi. Pentru a pune în evidenţă influenţa rigidităţilor cu valori disproporţionate, masa sistemului se consideră constantă. Variaţia modurilor proprii de vibraţie este măsura variaţiei răspunsului dinamic al structurilor la orice acţiuni. De aceea, drept criteriu de apreciere a fidelităţii modelelor dinamice s-au ales modurile proprii de vibraţie. 2.2.2. Sistemul dinamic structural analizat
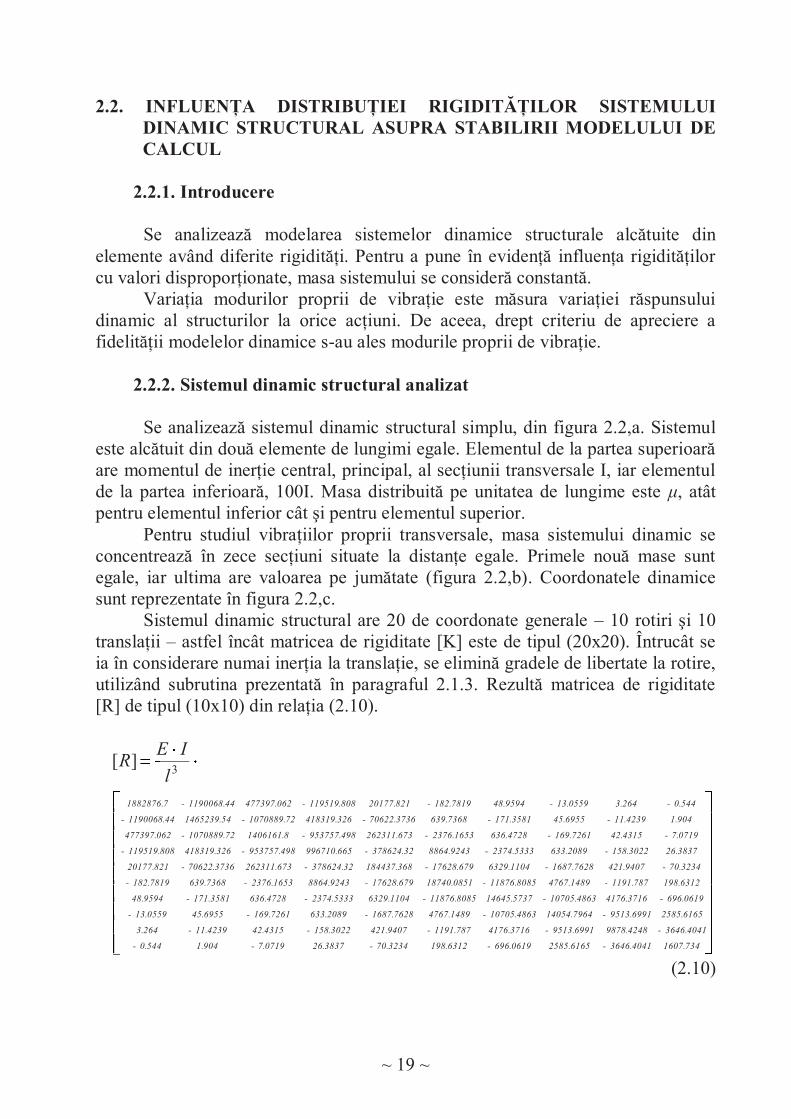
Se analizează sistemul dinamic structural simplu, din figura 2.2,a. Sistemul este alcătuit din două elemente de lungimi egale. Elementul de la partea superioară are momentul de inerţie central, principal, al secţiunii transversale I, iar elementul de la partea inferioară, 100I. Masa distribuită pe unitatea de lungime este μ, atât pentru elementul inferior cât şi pentru elementul superior. Pentru studiul vibraţiilor proprii transversale, masa sistemului dinamic se concentrează în zece secţiuni situate la distanţe egale. Primele nouă mase sunt egale, iar ultima are valoarea pe jumătate (figura 2.2,b). Coordonatele dinamice sunt reprezentate în figura 2.2,c. Sistemul dinamic structural are 20 de coordonate generale – 10 rotiri şi 10 translaţii – astfel încât matricea de rigiditate [K] este de tipul (20x20). Întrucât se ia în considerare numai inerţia la translaţie, se elimină gradele de libertate la rotire, utilizând subrutina prezentată în paragraful 2.1.3. Rezultă matricea de rigiditate [R] de tipul (10x10) din relaţia (2.10).
1607.7343646.4041-2585.6165696.0619-198.631270.3234-26.38377.0719-1.9040.544-
3646.4041-9878.42489513.6991-4176.37161191.787-421.9407158.3022-42.431511.4239-3.264
2585.61659513.6991-14054.796410705.4863-4767.14891687.7628-633.2089169.7261-45.695513.0559-
696.0619-4176.371610705.4863-14645.573711876.8085-6329.11042374.5333-636.4728171.3581-48.9594
198.63121191.787-4767.148911876.8085-18740.085117628.679-8864.92432376.1653-639.7368182.7819-
70.3234-421.94071687.7628-6329.110417628.679-184437.368378624.32-262311.67370622.3736-20177.821
26.3837158.3022-633.20892374.5333-8864.9243378624.32-996710.665953757.498-418319.326119519.808-
7.0719-42.4315169.7261-636.47282376.1653-262311.673953757.498-1406161.81070889.72-477397.062
1.90411.4239-45.6955171.3581-639.736870622.3736-418319.3261070889.72-1465239.541190068.44-
0.544-3.26413.0559-48.9594182.7819-20177.821119519.808-477397.0621190068.44-1882876.7
l
IER
3][
(2.10)
~ 20 ~
Fig. 2.2.
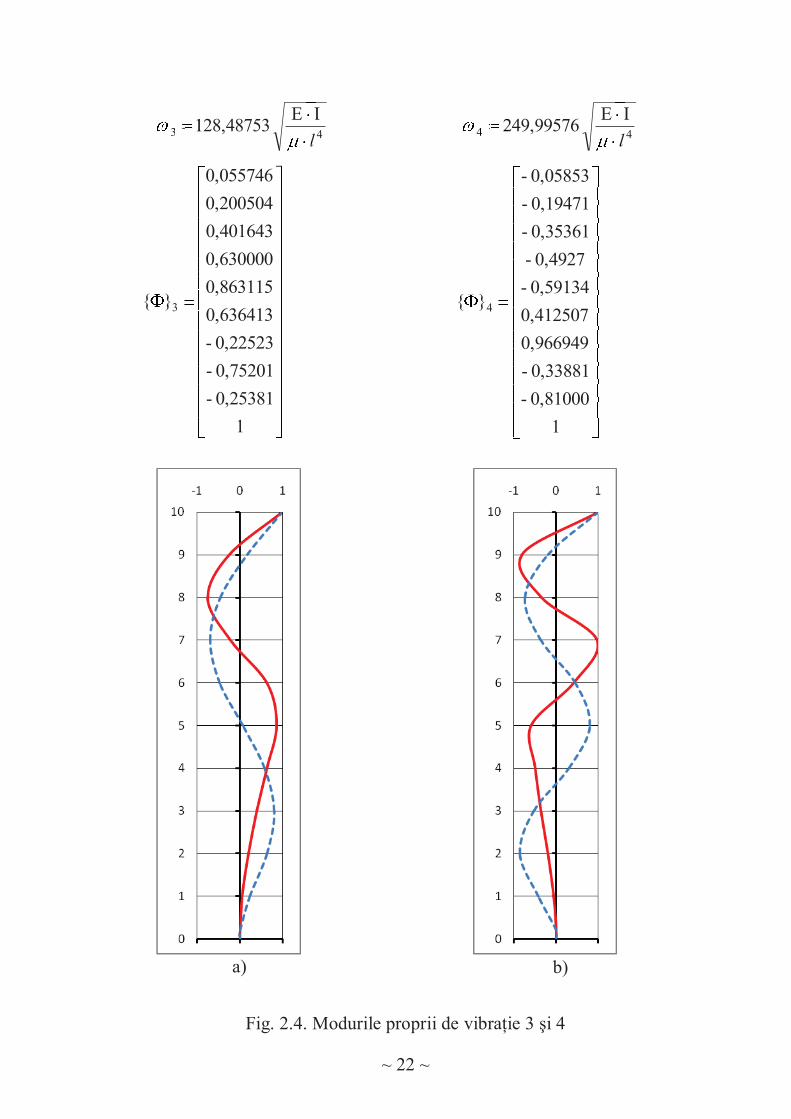
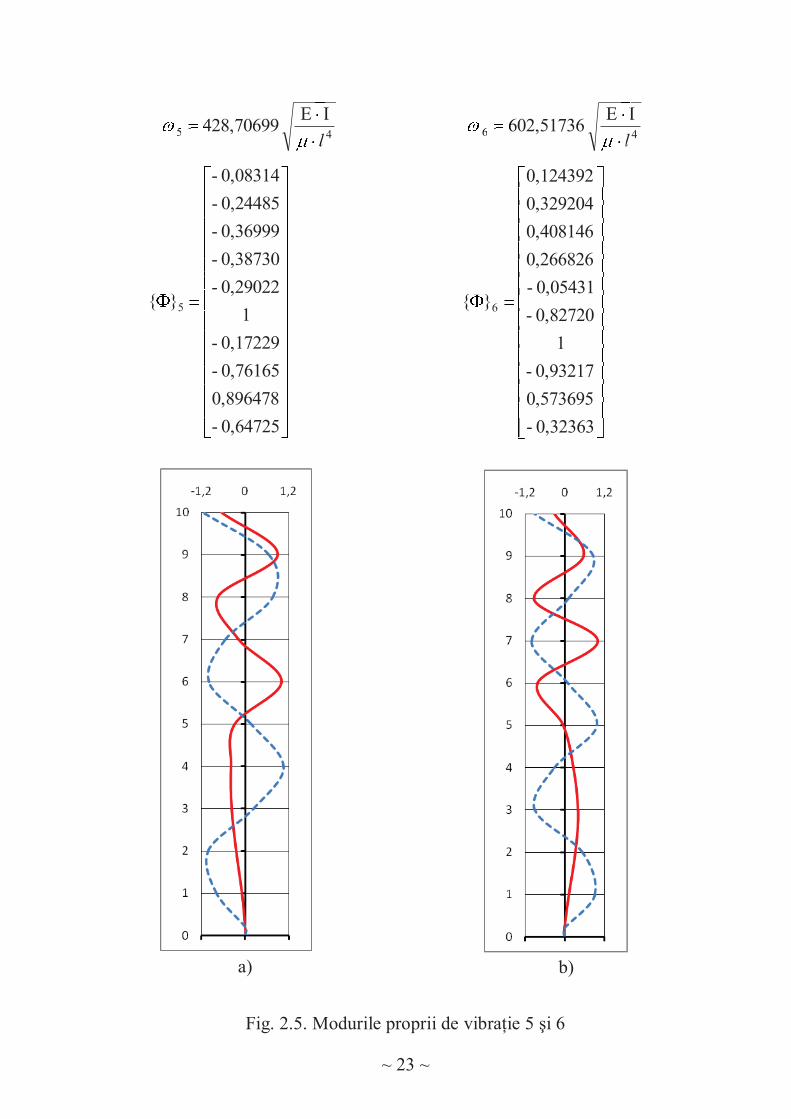
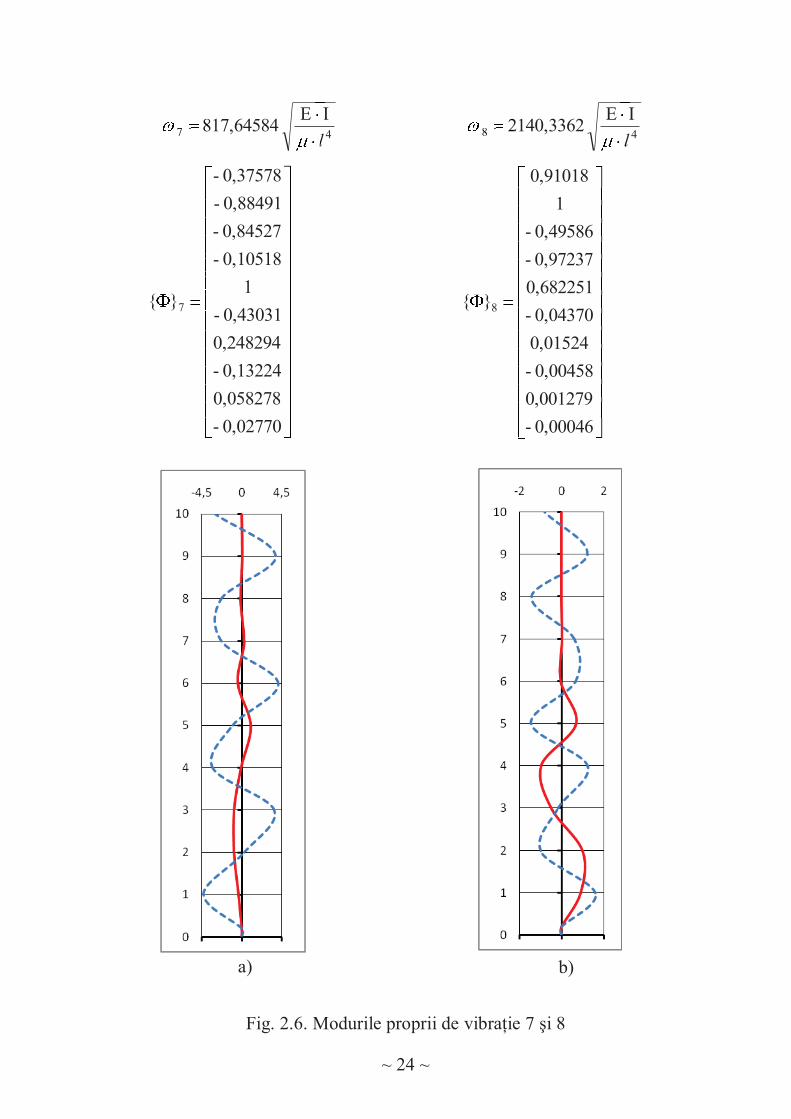
Cu această matrice de rigiditate şi cu matricea maselor diagonală, s-au determinat cele zece moduri proprii de vibraţie. Acestea sunt reprezentate în figurile 2.3, 2.4, 2.5, 2.6 şi 2.7 cu linie continuă (culoarea roşu). Cu linie întreruptă (culoarea albastru), s-au reprezentat formele proprii de vibraţie ale sistemului dinamic structural considerat cu momentul de inerţie 100I de la bază până la vârf. Normalizarea vectorilor proprii de vibraţie ale sistemului dinamic structural s-a efectuat astfel: s-au raportat toate elementele vectorului la elementul cu cea mai mare valoare absolută. Întrucât pentru unele elemente ale vectorilor proprii rezultă valori foarte mici în raport cu unitatea – de exemplu 2x10-5 – vectorii proprii s-au redat cu şase zecimale, tocmai pentru a pune în evidenţă anumite fenomene legate de sistemele dinamice structurale cu rigidităţi disproporţionate.
10
E,
I, μ
E
, 100
I, μ
l / 2
l
/ 2
m1
m5
m6
m7
m8
m9
m10
m2
m3
m4
6
7
8
9
5
4
3
2
1
a) Sistemul dinamic
b) Modelul dinamic
c) Coordonate
dinamice
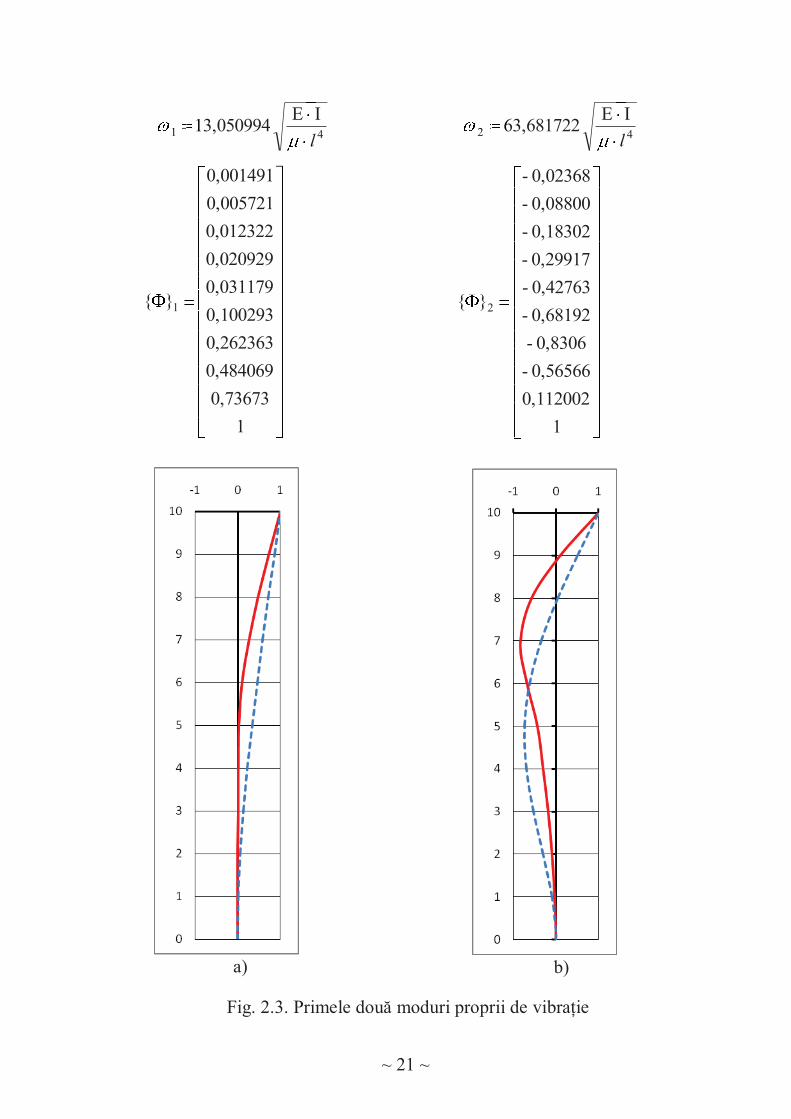
~ 21 ~
Fig. 2.3. Primele două moduri proprii de vibraţie
1
0,73673
0,484069
0,262363
0,100293
0,031179
0,020929
0,012322
0,005721
0,001491
}{ 1
1
0,112002
0,56566-
0,8306-
0,68192-
0,42763-
0,29917-
0,18302-
0,08800-
0,02368-
}{ 2
a) b)
41IE
13,050994ll
I1
l1
42IE
63,681722ll
I6
l2
~ 22 ~
Fig. 2.4. Modurile proprii de vibraţie 3 şi 4
1
0,25381-
0,75201-
0,22523-
0,636413
0,863115
0,630000
0,401643
0,200504
0,055746
}{ 3
1
0,81000-
0,33881-
0,966949
0,412507
0,59134-
0,4927-
0,35361-
0,19471-
0,05853-
}{ 4
a) b)
43IE
128,48753ll
I1
l3
44IE
249,99576ll
I2
l4
~ 23 ~
Fig. 2.5. Modurile proprii de vibraţie 5 şi 6
0,64725-
0,896478
0,76165-
0,17229-
1
0,29022-
0,38730-
0,36999-
0,24485-
0,08314-
}{ 5
0,32363-
0,573695
0,93217-
1
0,82720-
0,05431-
0,266826
0,408146
0,329204
0,124392
}{ 6
a) b)
45IE
428,70699ll
I4
l5
46IE
602,51736ll
I6
l6
~ 24 ~
Fig. 2.6. Modurile proprii de vibraţie 7 şi 8
0,02770-
0,058278
0,13224-
0,248294
0,43031-
1
0,10518-
0,84527-
0,88491-
0,37578-
}{ 7
0,00046-
0,001279
0,00458-
0,01524
0,04370-
0,682251
0,97237-
0,49586-
1
0,91018
}{ 8
a) b)
47IE
817,64584ll
I8
l7
48IE
2140,3362ll
I2
l8
~ 25 ~
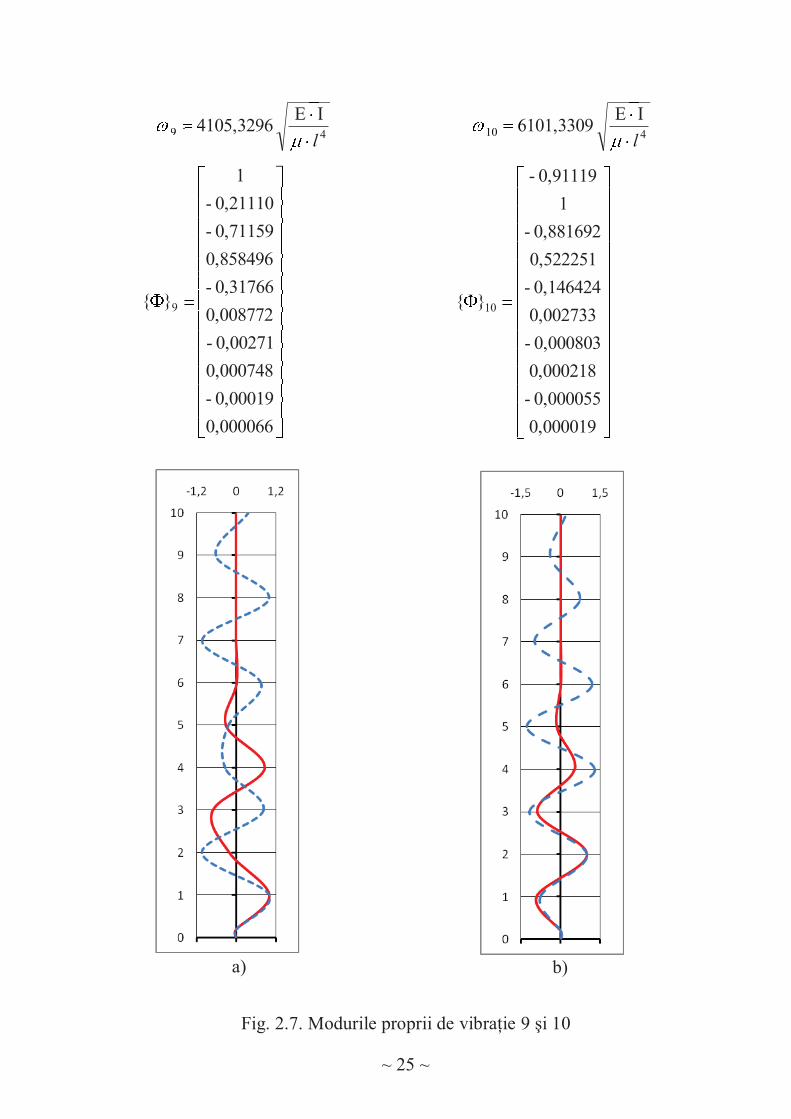
Fig. 2.7. Modurile proprii de vibraţie 9 şi 10
0,000066
0,00019-
0,000748
0,00271-
0,008772
0,31766-
0,858496
0,71159-
0,21110-
1
}{ 9
a) b)
0,000019
0,000055-
0,000218
0,000803-
0,002733
0,146424-
0,522251
0,881692-
1
0,91119-
}{ 10
49IE
4105,3296ll
I4
l9
410IE
6101,3309ll
I6
l10
~ 26 ~
2.2.3. Constatări şi comentarii În continuare se expun anumite constatări privind modurile proprii de vibraţie.
Din examinarea formelor proprii şi – mai eficient – a vectorilor proprii, rezultă că acestea respectă configuraţia formelor proprii ale sistemelor de acelaşi tip dar fără discontinuităţi pronunţate ale rigidităţii, în ceea ce priveşte numărul schimbărilor de semn ale elementelor vectorului propriu, număr egal cu cel al punctelor de anulare a formei proprii de vibraţie: - în forma proprie fundamentală (figura 2.3.a) toate ordonatele sunt în
acelaşi sens, deci „zero” puncte de anulare; - în forma proprie 2 (figura 2.3.b) există un singur punct de anulare, ceea
ce revine la o schimbare de semn în elementele vectorului propriu 2}{ 2} ; - forma proprie 3 (figura 2.4.a) are două puncte de anulare; - forma proprie 4 (figura 2.4.b) are trei puncte de anulare; - forma proprie 5 (figura 2.5.a) are patru puncte de anulare; - forma proprie 6 (figura 2.5.b) are cinci puncte de anulare; - forma proprie 7 (figura 2.6.a) are şase puncte de anulare; - vectorul propriu 8}{ 8} are şapte schimbări de semn ale elementelor lui;
forma proprie corespunzătoare este reprezentată în figura 2.6.b; - vectorul propriu 9}{ 9} are opt schimbări de semn; - vectorul propriu 10}{ 10} are nouă schimbări de semn.
În primele şase moduri proprii de vibraţie formele proprii sunt mai pronunţate în partea superioară a sistemului structural, adică în zona flexibilă.
În ultimele patru moduri proprii de vibraţie, formele proprii sunt mai pronunţate în partea inferioară a sistemului structural, adică în zona cu rigiditate mai mare.
În toate formele proprii de vibraţie numărul buclelor este mai mare în zona flexibilă, cu excepţia ultimeia, în care acest număr este egal.
Raportul dintre cea mai înaltă şi cea mai joasă pulsaţie proprie a modelului dinamic al sistemului structural este:
5,46705,13
33,6101
10
1 46
10
1 (2.11)
Se vor mai utiliza rapoartele:
66,1649,128
34,2140
3
8 12
3
8 (2.12)
şi
06,034,2140
49,128
8
3 028
3 (2.13)
~ 27 ~
ataşate modurilor proprii de vibraţie 3 şi 8, caracteristice pentru analiza care se efectuează. În continuare se fac câteva comentarii asupra constatărilor prezentate:
În modelarea sistemelor dinamice structurale, sunt necesare mai multe puncte de concentrare ale maselor pe aceeaşi lungime în zona flexibilă în raport cu zona cu rigiditate mai mare.
Dacă în analiza dinamică sunt considerate şi zonele deosebit de flexibile, atunci reţeaua de elemente finite trebuie să fie deosebit de fină în aceste zone.
În cele ce urmează se dă explicaţia configuraţiei formelor proprii din modurile joase în contrast cu modurile proprii superioare. Sistemul dinamic structural vibrează în toate modurile proprii, fiecare mod
având o pondere mai mare sau mai mică în răspunsul dinamic structural. În modurile proprii joase, sistemul dinamic structural are perioadele proprii K,, 21 TT lungi şi pulsaţii proprii K,, 21 ,2,1 mici. În aceste moduri proprii sunt
accentuate vibraţiile zonei flexibile a sistemului dinamic structural.
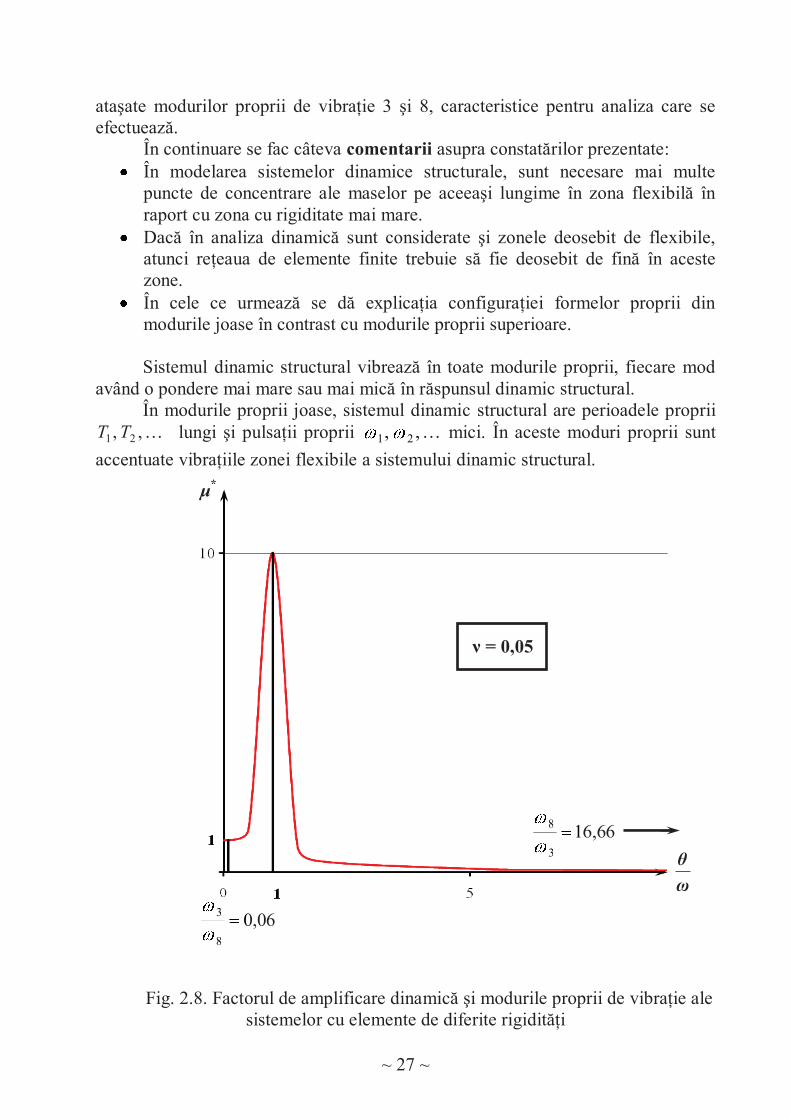
Fig. 2.8. Factorul de amplificare dinamică şi modurile proprii de vibraţie ale
sistemelor cu elemente de diferite rigidităţi
μ*
66,163
8 13
8
06,08
3 08
3
ω
θ
ν = 0,05
~ 28 ~
În modurile proprii superioare, sistemul dinamic are perioade proprii
109 ,, TTK scurte şi pulsaţii proprii 109 ,, 109 ,K mari. În aceste moduri proprii sunt
accentuate vibraţiile zonei cu rigiditate mare. Zona flexibilă – mai lentă în ceea ce priveşte vibraţiile – nu poate urmări
vibraţiile rapide ale zonei cu rigiditate mare. De aceea în modurile proprii 8, 9 şi 10 zona flexibilă practic „stă pe loc”.
Fenomenul poate fi pus şi mai bine în evidenţă dacă se consideră coeficientul dinamic sau „factorul de amplificare dinamică”. În figura 2.8 s-a reprezentat acest factor pentru o fracţiune din amortizarea critică de 5%.
În figura 2.8, reprezintă pulsaţia acţiunii, iar reprezintă pulsaţia proprie a sistemului dinamic. În modul propriu 8, pulsaţia 88 reprezintă „o pulsaţie a
acţiunii” pentru modul propriu 3, reprezentat de 33
66,163
8
3
13
8
3
(2.14)
iar amplificarea dinamică este practic nulă
0)66,16( 0((( (2.15)
astfel încât partea flexibilă practic „stă pe loc”. În modul propriu 3, pulsaţia 33 reprezintă „o pulsaţie a acţiunii” pentru
modul propriu 8, reprezentat de 88
06,08
3
8
08
3
8
(2.16)
iar amplificarea dinamică este aproximativ egală cu 1
1)06,0( 1((( (2.17)
astfel încât partea cu rigiditate mai mare are deplasări, dar acestea nu sunt amplificate dinamic (figura 2.4,a). Aceste considerente reprezintă o contribuţie originală a tezei de doctorat. 2.2.4. Concluzii
1. În modelarea sistemelor cu elemente având rigidităţi disproporţionate este de
recomandat ca părţile deosebit de flexibile ale sistemului structural să nu fie considerate în analiză. Dacă este posibil, acestea vor fi considerate „elemente uşoare” şi vor fi tratate separat. Dacă totuşi aceste elemente flexibile sunt incluse în modelul de calcul cu care se efectuează analiza dinamică, atunci reţeaua de elemente finite trebuie să fie îndesită în aceste zone flexibile.
~ 29 ~
2. În modurile proprii de vibraţie cu frecvenţe înalte, zonele flexibile ale sistemului structural – caracterizate de perioade lungi – nu pot urmări vibraţiile rapide cu aceste frecvenţe şi practic nu se deformează. Acest fenomen poate fi pus în evidenţă prin intermediul factorului de amplificare dinamică, ceea ce reprezintă o contribuţie originală a tezei de doctorat. Reciproc, în modurile proprii joase, porţiunile cu rigiditate pronunţată nu au
deplasările amplificate dinamic.
2.3 INFLUENŢA DISTRIBUŢIEI MASELOR ŞI ÎNCĂRCĂRILOR DINAMICE ASUPRA MODELULUI DE CALCUL
2.3.1. Introducere
Se analizează întâi influenţa distribuţiei maselor asupra modurilor proprii de
vibraţie şi implicit asupra stabilirii modelului de calcul. Pentru a pune în evidenţă influenţa maselor cu valori disproporţionate, rigiditatea sistemului dinamic structural se consideră constantă.
Sistemul dinamic structural este studiat în două variante: una cu masa uniformă şi cealaltă cu o masă suplimentară, cu valoare deosebit de mare.
2.3.2. Sistem dinamic structural simetric, cu masa distribuită uniform
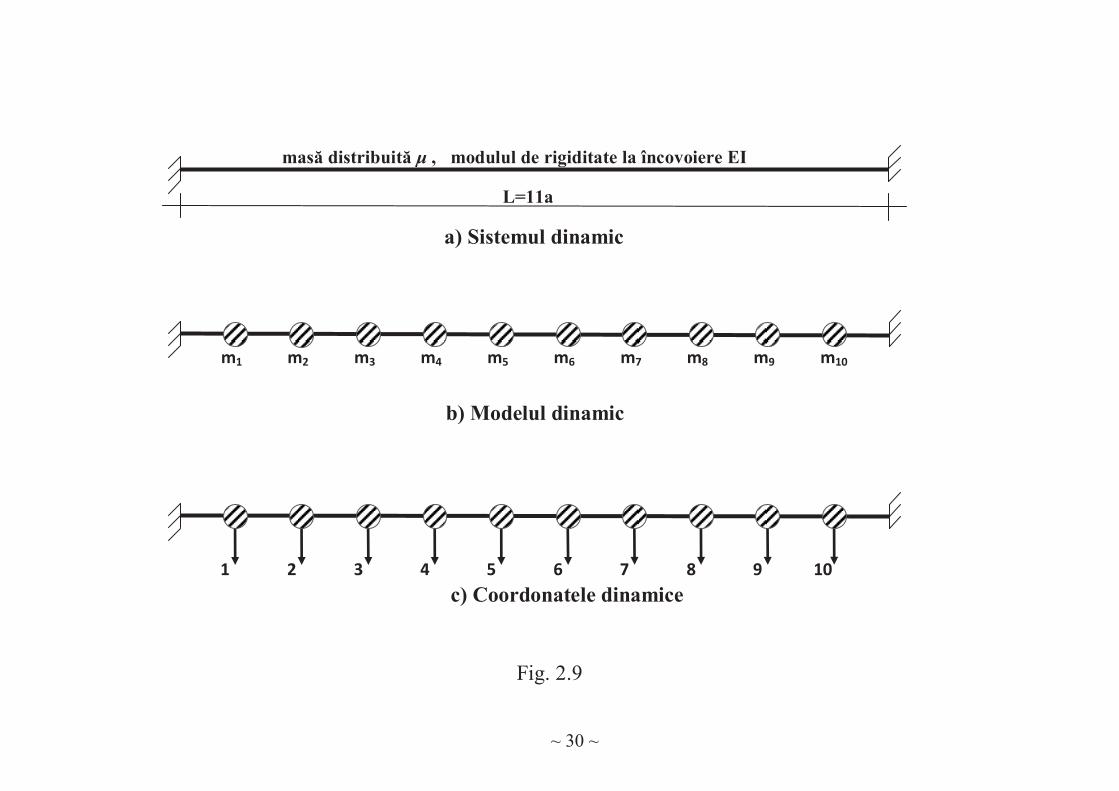
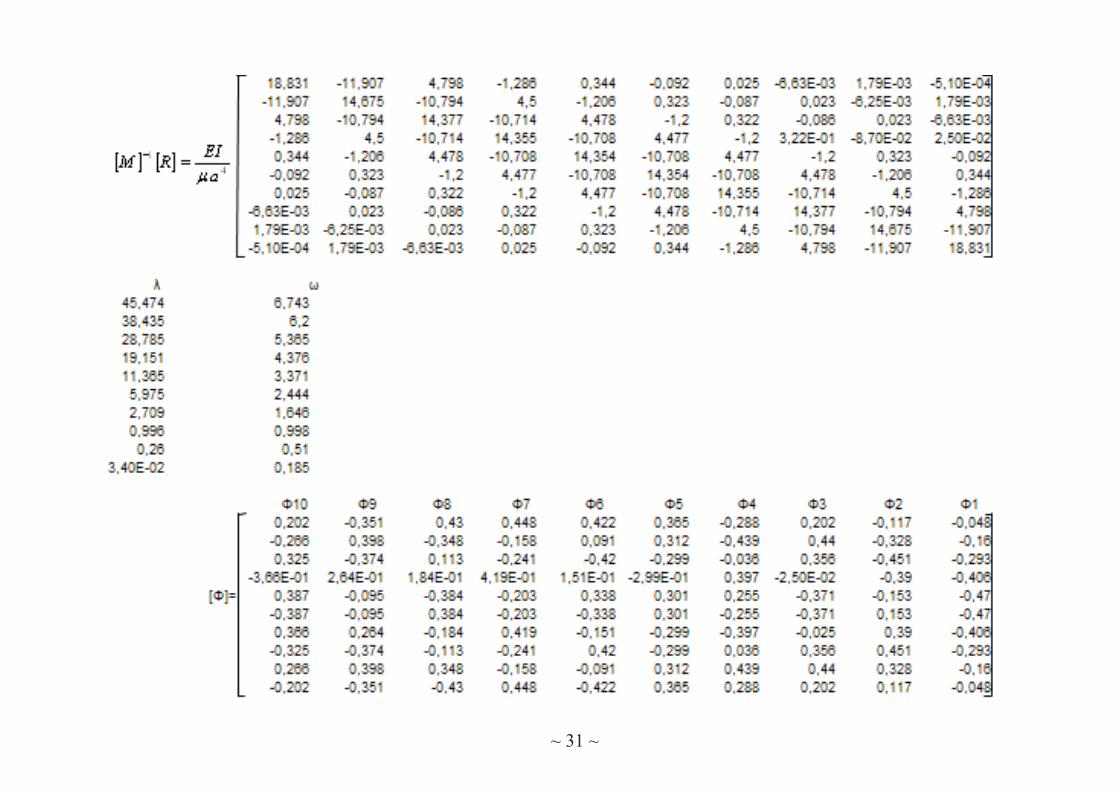
Sistemul dinamic structural este reprezentat în figura 2.9,a. Masa este
distribuită uniform şi are valoarea μ pe unitatea de lungime. De asemenea, modulul de rigiditate la încovoiere este constant. Modelul dinamic al sistemului din figura 2.9,b conţine 10 mase concentrate egale. Se neglijează inerţia la rotaţie a acestor mase, astfel încât coordonatele dinamice din figura 2.9,c corespund celor 10 translaţii. Matricea de rigiditate totală [K], de tipul (20x20), a fost condensată la matricea de rigiditate dinamică [R], de tipul (10x10), cu ajutorul subrutinei prezentate în paragraful 2.1.3. Matricea maselor, [M], rezultă ca o matrice diagonală, cu cele zece elemente diagonale egale cu μa, astfel încât se obţine matricea [M]-1[R] prezentată în continuare. Clough R.W. [12] a demonstrat că rezultatele obţinute prin utilizarea unei matrice de inerţie diagonale sunt foarte apropiate de cele obţinute utilizând o matrice de inerţie “consecventă”. Valorile proprii )10,,1(,2
K1iii,2
ii şi pulsaţiile proprii de vibraţie
ii, )10,,1( K1i , corespund celor 10 coloane ale matricei modale [Φ].
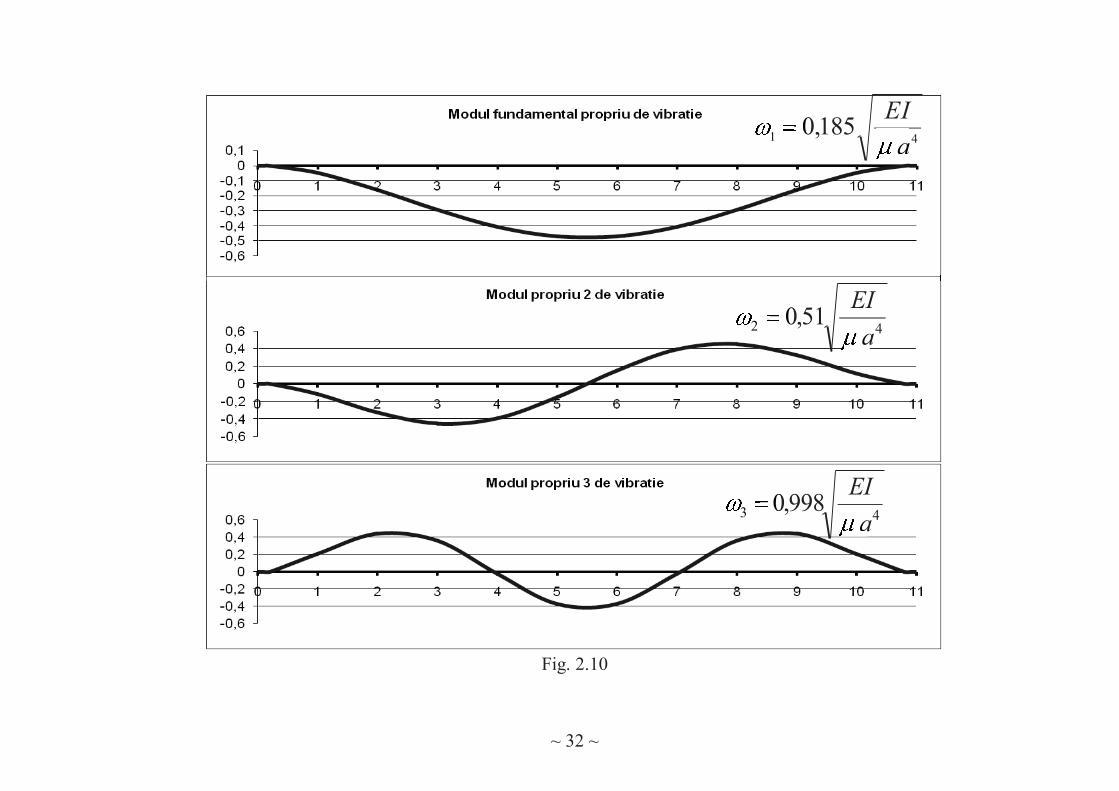
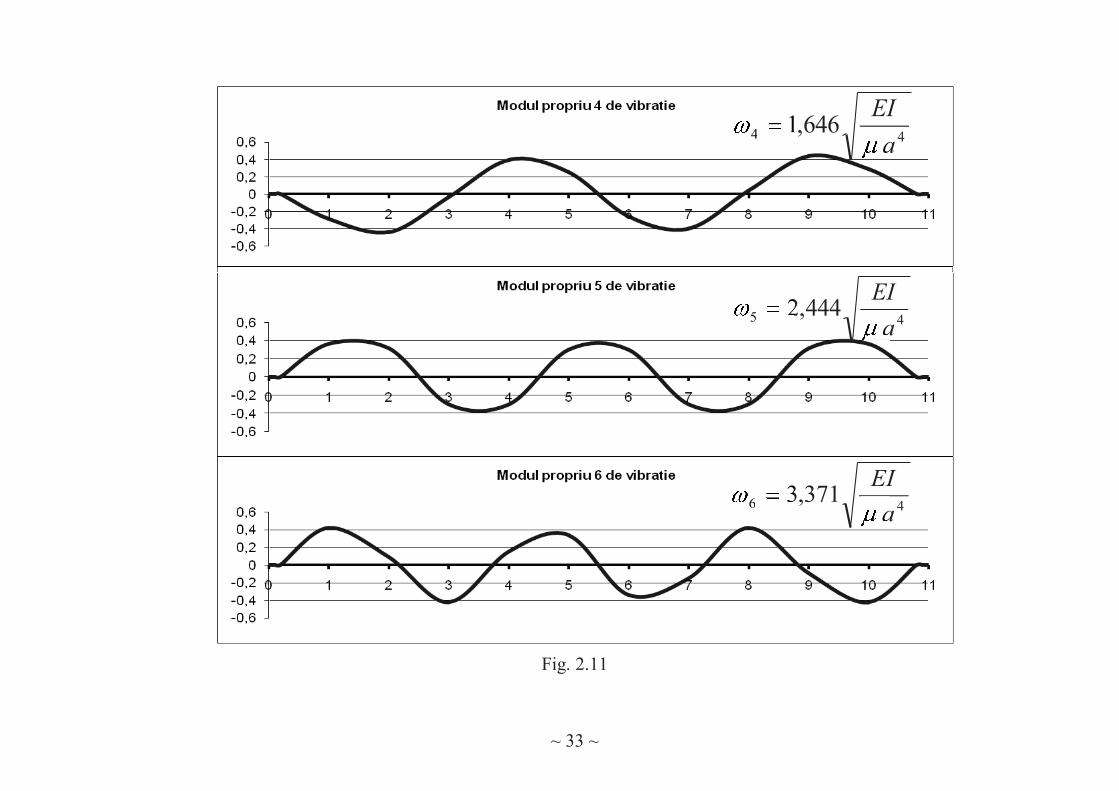
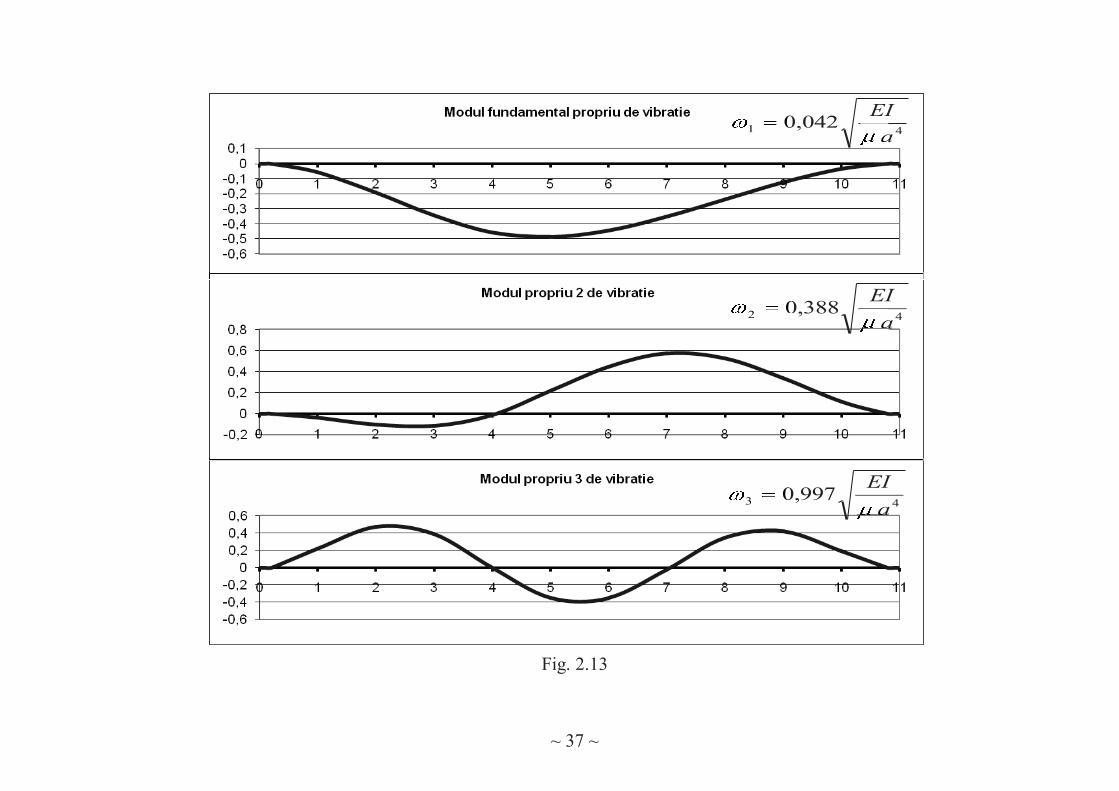
Primele 6 moduri proprii de vibraţie sunt reprezentate în figurile 2.10 şi 2.11. Ultimele 4 moduri proprii sunt o caracteristică a modelului dinamic şi mai puţin a sistemului dinamic.
~ 30 ~
a) Sistemul dinamic
L=11a
masă distribuită μ , modulul de rigiditate la încovoiere EI
m1 m2 m3 m4 m5 m6 m7 m8 m9 m10
b) Modelul dinamic
1 2 3 5 4 6 7 8 9 10
c) Coordonatele dinamice
Fig. 2.9
~ 31 ~
~ 32 ~
Fig. 2.10
42 51,0a
EI
a2 0
43 998,0a
EI
a3 0
41 185,0a
EI
a1 0
~ 33 ~
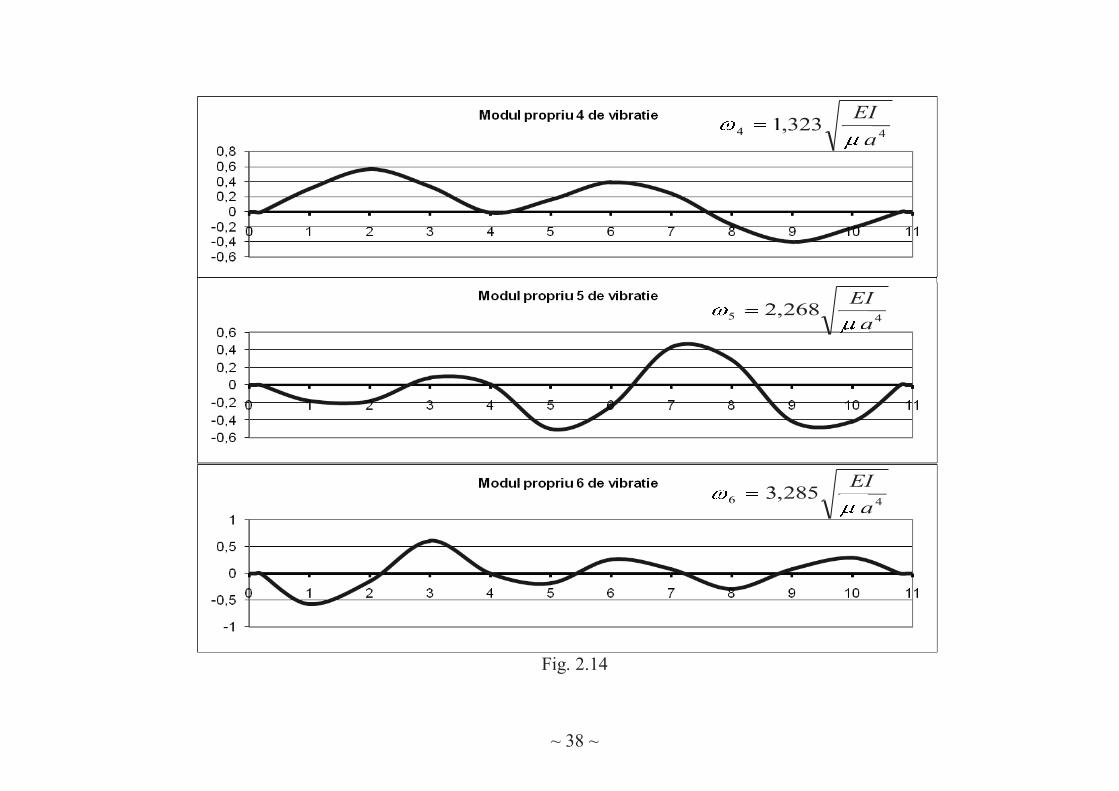
Fig. 2.11
44 646,1a
EI
a4 1
45 444,2a
EI
a5 2
46 371,3a
EI
a6 3
~ 34 ~
Din examinarea figurilor 2.10 si 2.11 rezultă că:
forma proprie 1 este simetrică; forma proprie 2 este antisimetrică; forma proprie 3 este simetrică; forma proprie 4 este antisimetrică; forma proprie 5 este simetrică; forma proprie 6 este antisimetrică.
Această caracteristică a formelor proprii de vibraţie reprezintă şi o verificare
a corectitudinii rezultatelor. 2.3.3. Sistem dinamic structural cu o masă disproporţionată
Sistemul dinamic structural prezintă o masă concentrată de 99μa, în afara
masei distribuite. Această masă concentrată este situată în poziţia a patra, astfel încât
am a1004 1 (2.18)
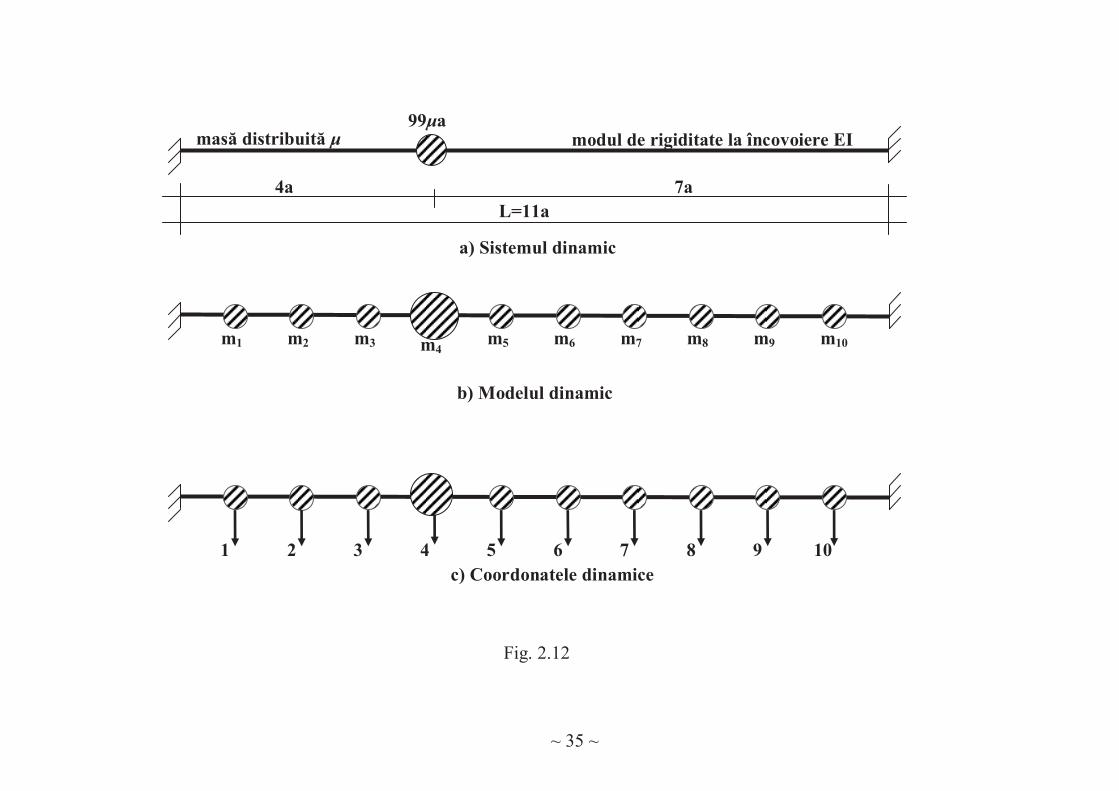
Sistemul dinamic structural este reprezentat în figura 2.12,a, modelul dinamic în figura 2.12,b, iar coordonatele dinamice în figura 2.12,c.
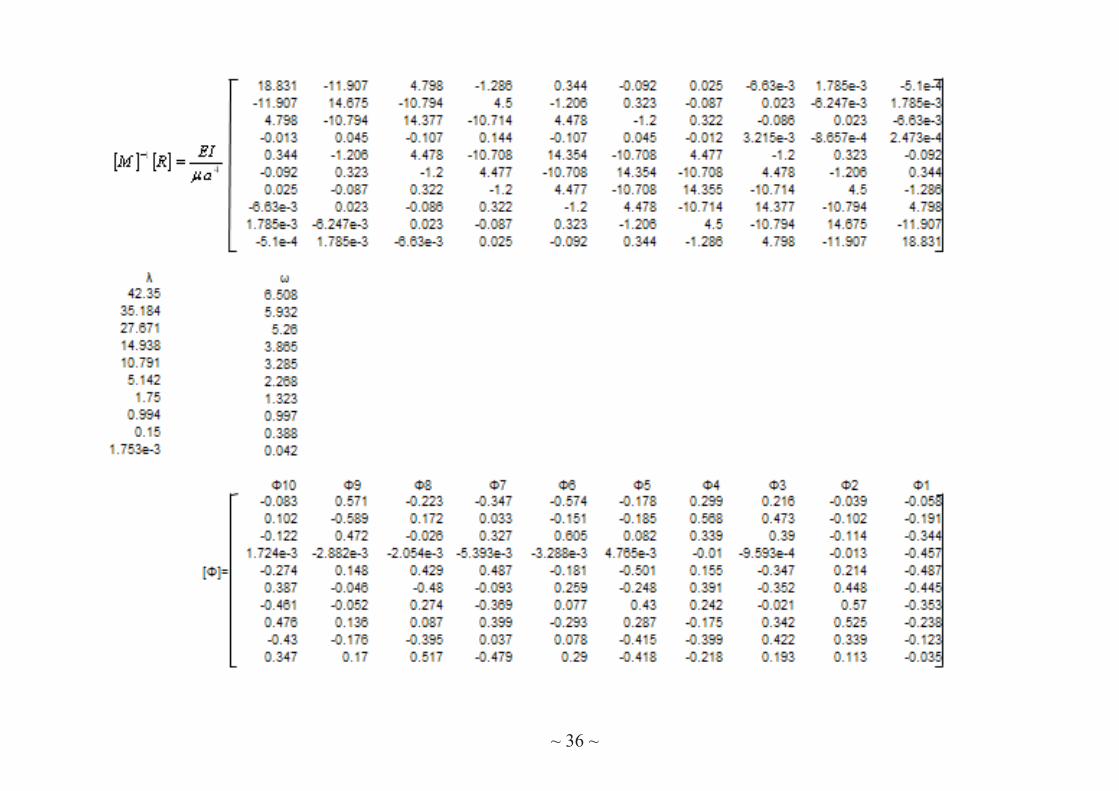
Datorită masei m4 mari în raport cu celelalte mase, linia a 4-a a matricei
][][ 1RM
1 are elemente mai mici decât celelalte linii. Sunt prezentate în continuare toate cele 10 valori proprii
)10,,1(2K1i
ii
2ii
(2.19)
precum şi pulsaţiile proprii de vibraţie )10,,1(, K1i
i(,
i şi vectorii proprii de
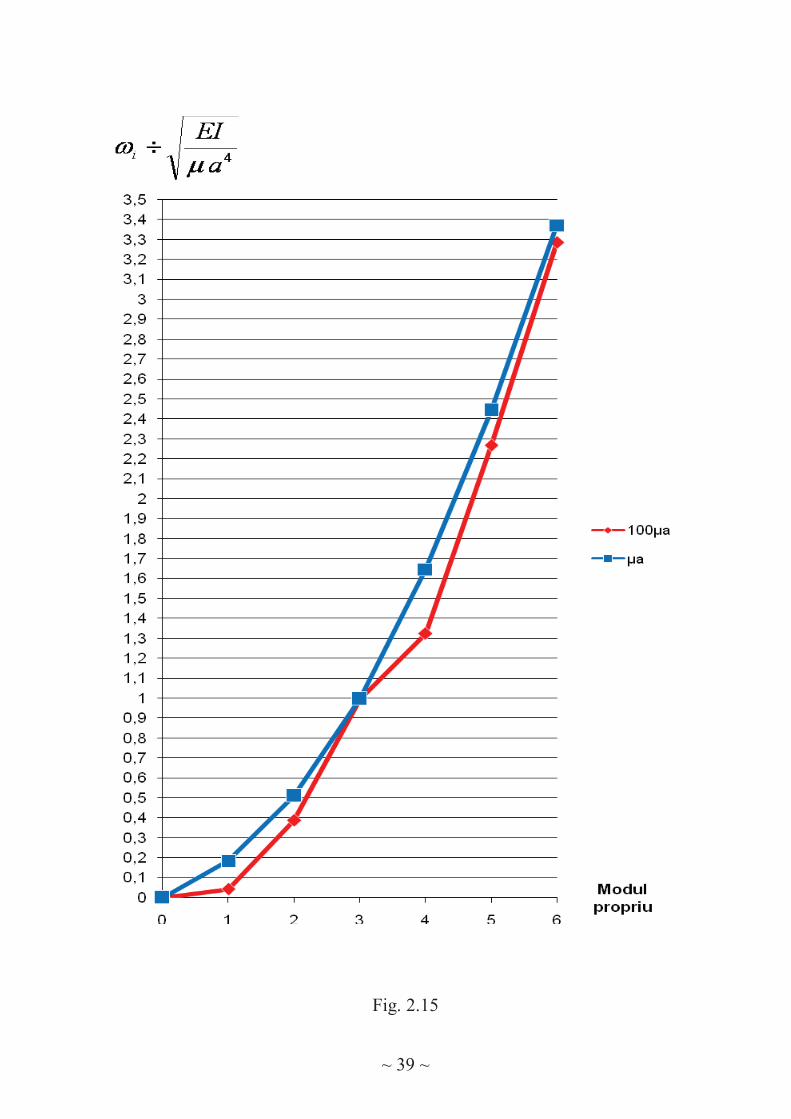
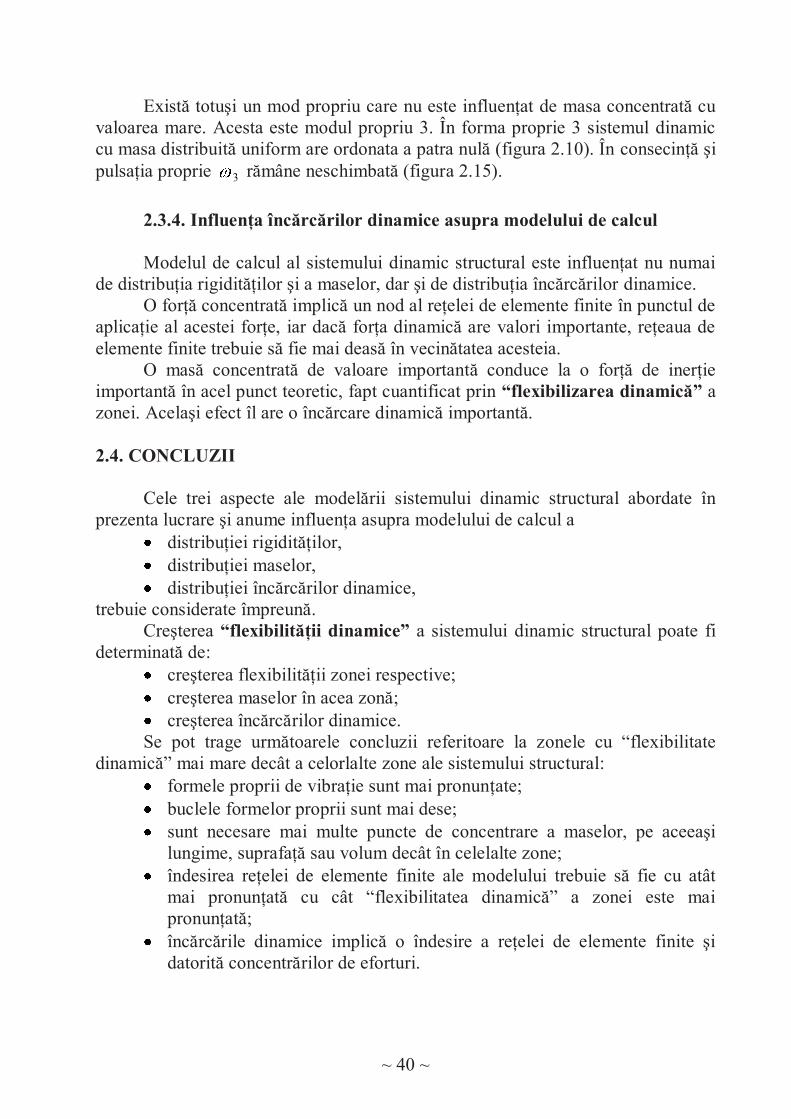
vibraţie incluşi în matricea modală [Φ]. Asimetria distribuţiei maselor produce asimetria tuturor formelor proprii de vibraţie, aşa cum rezultă din figurile 2.13 şi 2.14. Masa concentrată disproporţionată produce „flexibilizarea dinamică” a sistemului structural, aşa cum rezultă şi din figura 2.15, în care sunt prezentate comparativ pulsaţiile proprii de vibraţie. Întrucât există o singură masă cu valoare deosebit de mare, aceasta se deplasează într-un singur mod propriu de vibraţie – cel mai flexibil – şi anume modul propriu fundamental. Acest fapt este pus în evidenţă de formele proprii de vibraţie din figurile 2.13 şi 2.14. În formele proprii 2, 3, 4, 5, … ordonata a patra este practic nulă. În această poziţie se află masa concentrată. Această masă joacă rolul unui „volant”.
~ 35 ~
a) Sistemul dinamic
L=11a
masă distribuită μ
m1 m2 m3 m4 m5 m6 m7 m8 m9 m10
b) Modelul dinamic
1 2 3 5 4 6 7 8 9 10
c) Coordonatele dinamice
Fig. 2.12
modul de rigiditate la încovoiere EI 99μa
4a 7a
~ 36 ~
~ 37 ~
Fig. 2.13
41 042,0a
EI
a1 0
42 388,0a
EI
a2 0
43 997,0a
EI
a3 0
~ 38 ~
Fig. 2.14
44 323,1a
EI
a4 1
45 268,2a
EI
a5 2
46 285,3a
EI
a6 3
~ 39 ~
Fig. 2.15
~ 40 ~
Există totuşi un mod propriu care nu este influenţat de masa concentrată cu valoarea mare. Acesta este modul propriu 3. În forma proprie 3 sistemul dinamic cu masa distribuită uniform are ordonata a patra nulă (figura 2.10). În consecinţă şi pulsaţia proprie 33 rămâne neschimbată (figura 2.15).
2.3.4. Influenţa încărcărilor dinamice asupra modelului de calcul
Modelul de calcul al sistemului dinamic structural este influenţat nu numai de distribuţia rigidităţilor şi a maselor, dar şi de distribuţia încărcărilor dinamice. O forţă concentrată implică un nod al reţelei de elemente finite în punctul de aplicaţie al acestei forţe, iar dacă forţa dinamică are valori importante, reţeaua de elemente finite trebuie să fie mai deasă în vecinătatea acesteia. O masă concentrată de valoare importantă conduce la o forţă de inerţie importantă în acel punct teoretic, fapt cuantificat prin “flexibilizarea dinamică” a zonei. Acelaşi efect îl are o încărcare dinamică importantă. 2.4. CONCLUZII
Cele trei aspecte ale modelării sistemului dinamic structural abordate în
prezenta lucrare şi anume influenţa asupra modelului de calcul a distribuţiei rigidităţilor, distribuţiei maselor, distribuţiei încărcărilor dinamice,
trebuie considerate împreună. Creşterea “flexibilităţii dinamice” a sistemului dinamic structural poate fi determinată de:
creşterea flexibilităţii zonei respective; creşterea maselor în acea zonă; creşterea încărcărilor dinamice.
Se pot trage următoarele concluzii referitoare la zonele cu “flexibilitate dinamică” mai mare decât a celorlalte zone ale sistemului structural:
formele proprii de vibraţie sunt mai pronunţate; buclele formelor proprii sunt mai dese; sunt necesare mai multe puncte de concentrare a maselor, pe aceeaşi
lungime, suprafaţă sau volum decât în celelalte zone; îndesirea reţelei de elemente finite ale modelului trebuie să fie cu atât
mai pronunţată cu cât “flexibilitatea dinamică” a zonei este mai pronunţată;
încărcările dinamice implică o îndesire a reţelei de elemente finite şi datorită concentrărilor de eforturi.
~ 41 ~
CAPITOLUL 3 INFLUENŢA GRADULUI DE RAFINARE AL DISCRETIZĂRII ASUPRA RĂSPUNSULUI DINAMIC 3.1. ASPECTE FUNDAMENTALE ÎN METODA ELEMENTELOR FINITE
3.1.1. Principiul metodei elementelor finite [51]
Problemele mecanicii mediilor continue au de obicei două formulări matematice echivalente: o formulare diferenţială şi una variaţională. În cazul formulării diferenţiale, soluţia problemei se obţine prin integrarea sistemului de ecuaţii cu derivate parţiale care descriu fenomenul, ţinând seama de condiţiile de margine. În cazul formulării variaţionale, soluţia problemei se obţine prin căutarea unei funcţii care să minimizeze sau să facă staţionară o funcţională supusă la aceleaşi condiţii de margine. Funcţionala este un scalar, scrisă sub formă integrală:
dux
uGdDux
uFED
),,(),,( KK (3.1)
în care D este un domeniu având graniţa , u este funcţia necunoscută iar F şi G sunt operatori daţi. Dacă E este funcţionala asociată problemei descrisă de ecuaţiile
cu derivate parţiale 0)(
)(
)( 2
1
0
M
uA
uA
uA în interiorul domeniului D şi de condiţiile
de margine 0)(
)(
)( 2
1
0
M
uB
uB
uB pe graniţa a domeniului, atunci condiţia de
staţionar a funcţionalei ( 00E , pentru o variaţie foarte mică uu a funcţiei) poate fi pusă sub următoarea formă:
duBudDuAuE T
D
T )()( (3.2)
Pentru ca egalitatea (3.2) să existe independent de creşterea uu a funcţiei, este necesar ca 0)( 0uA pe D şi 0)( 0uB pe , adică să fie satisfăcut sistemul de ecuaţii care descrie fenomenul şi condiţiile de margine asociate. Găsirea unei funcţii u care să satisfacă condiţia de staţionar 00E este dificilă, iar în cazul graniţelor mai complicate este chiar imposibilă. Pentru a evita acest inconvenient se caută o soluţie aproximativă de forma:
nnazyxNazyxNazyxNuu ),,(),,(),,( 2211 NNNu K (3.3)
sau

~ 42 ~
iiazyxNu ),,( ,
unde Ni(x,y,z) sunt funcţii de aproximare, alese convenabil, iar ai sunt parametrii independenţi. Funcţiile de aproximare Ni se definesc şi sunt continue pe întregul domeniu, existând marele inconvenient privind găsirea unor funcţii adecvate care să conducă la o soluţie acceptabilă a problemei. Metoda elementelor finite porneşte tot de la formularea variaţională a problemei. Pentru a depăşi inconvenientul de definire a funcţiilor de aproximare, domeniul de studiu se împarte într-o serie de subdomenii, denumite elemente finite. Conectarea acestora se realizează într-un număr finit de puncte situate pe graniţa elementelor, denumite puncte nodale sau noduri. Funcţionala E din expresia (3.1) se scrie ca o sumă a integralelor pe domeniile elementelor finite:
m
eDD ee
dGdDFdGdDFE1
)( (3.4)
unde De este domeniul unui element, iar e este graniţa elementului care coincide cu graniţa domeniului. Funcţiile de aproximare Ni(x,y,z) se definesc şi au anumite proprietăţi de continuitate numai pe domeniul unui element, având de această dată forme simple. Parametrii independenţi ai se aleg ca fiind valorile funcţiei u în punctele nodale, devenind valorile nodale ui. Funcţionala se exprimă la nivelul elementului, în funcţie de valorile nodale corespunzătoare nodurilor elementului, iar prin sumarea (3.4) se obţine funcţionala E în funcţie de valorile nodale din întregul domeniu. În cazul funcţionalelor cuadratice (funcţiile F şi G se exprimă sub formă de polinoame în u şi derivate ale lui u până la ordinul II) funcţionala se poate pune sub forma simplă:
}{}{}]{[}{2
1RuuKuE TT {
2
1 (3.5)
Definirea funcţionalei ca o sumă a contribuţiilor elementelor conduce la:
m
e
TTm
ee ruukuEE
11
}){}{}]{[}{2
1( (3.6)
unde kk este matricea caracteristică a unui element, iar rr este vectorul asociat. În relaţia (3.5) uu semnifică vectorul valorilor nodale din întreg domeniul, iar în relaţia (3.6) uu semnifică vectorul valorilor din nodurile unui element. Din condiţia de staţionaritate rezultă un sistem de ecuaţii algebrice liniare:
0}{}]{[1
0{[1
RuK
u
E
u
E
u
E
n
M (3.7)
~ 43 ~
Rezolvarea sistemului (3.7) permite evaluarea valorilor nodale ui. În funcţie de acestea, pentru fiecare element finit , pe baza funcţiilor de aproximare, se găsesc valorile funcţiei u şi ale mărimilor derivate în orice punct al domeniului. Avantajele metodei sunt următoarele: exprimarea funcţionalei la nivelul elementului şi calculul matricelor caracteristice kk devine un proces standard, uşor de implementat în programe de calcul; asamblarea sistemului urmează regulile simple de sumare a matricelor şi vectorilor; simetria matricei coeficienţilor KK uşurează mult rezolvarea sistemului.
3.1.2. Clase şi tipuri de elemente finite [51]
Problemele de câmp (câmpul deplasărilor, câmpul tensiunilor, câmpul termic etc.) pot fi încadrate în clase de continuitate C0, C1, ...,Cn ( Cn – variabila de câmp şi derivatele sale de ordinul n sunt continue pe frontiera dintre elemente; derivata de ordinul n+1 este continuă pe element, dar discontinuă pe frontieră). Clasa de continuitate care trebuie asigurată la o rezolvare în elemente finite depinde de ordinul derivatelor care apar în expresia de sub semnul integrală al funcţionalei. Dacă ordinul derivatelor conţinute este k, atunci pentru obţinerea unei soluţii aproximative care se apropie de soluţia exactă pe măsura dimensiunilor elementelor se cer îndeplinite:
condiţia de compatibilitate – la frontiera comună dintre două elemente trebuie asigurată o continuitate de clasă Ck-1
condiţia de completitudine – în interiorul elementului trebuie asigurată o continuitate de clasă Ck
În cazul elementelor de clasă C0, dacă variabila de câmp este un scalar, atunci fiecărui nod i se ataşează câte o necunoscută (valoarea nodală a funcţiei). Dacă variabila de câmp este un vector, atunci fiecărui punct i se ataşează ca necunoscute valorile nodale ale componentelor vectorului. Necunoscutele ataşate nodului mai poartă denumirea, improprie, de grade de libertate. Un element finit al discretizării are un anumit număr de noduri prin intermediul cărora este conectat cu elementele vecine. Definirea funcţiei necunoscute pe domeniul elementului se face prin intermediul funcţiilor de aproximare (cele mai folosite fiind cele polinomiale). Între configuraţia elementului şi funcţiile de aproximare există o interdependenţă bine definită (numărul coeficienţilor polinomiali trebuie să fie egal cu numărul nodurilor elementului).
Elementele finite sunt departajate prin clasa de continuitate pe care o asigură şi prin tipul acestora, exprimat prin gradul funcţiilor de aproximare. Primul aspect are implicaţii asupra gradelor de libertate nodale iar cel de-al doilea asupra numărului de noduri ataşate elementului. Terminologia din domeniu denumeşte un element sub forma „element de clasă Ck cu funcţii de aproximare de grad n”. Elementele de clasă C0 cu funcţii de aproximare de gradul I sunt denumite uzual elemente liniare. Elementele de clasă C0 cu funcţii de aproximare de gradul II sunt denumite uzual elemente pătratice.
~ 44 ~
3.1.3. Funcţii de aproximare în coordonate globale [51]
3.1.3.1. Generarea funcţiilor de aproximare
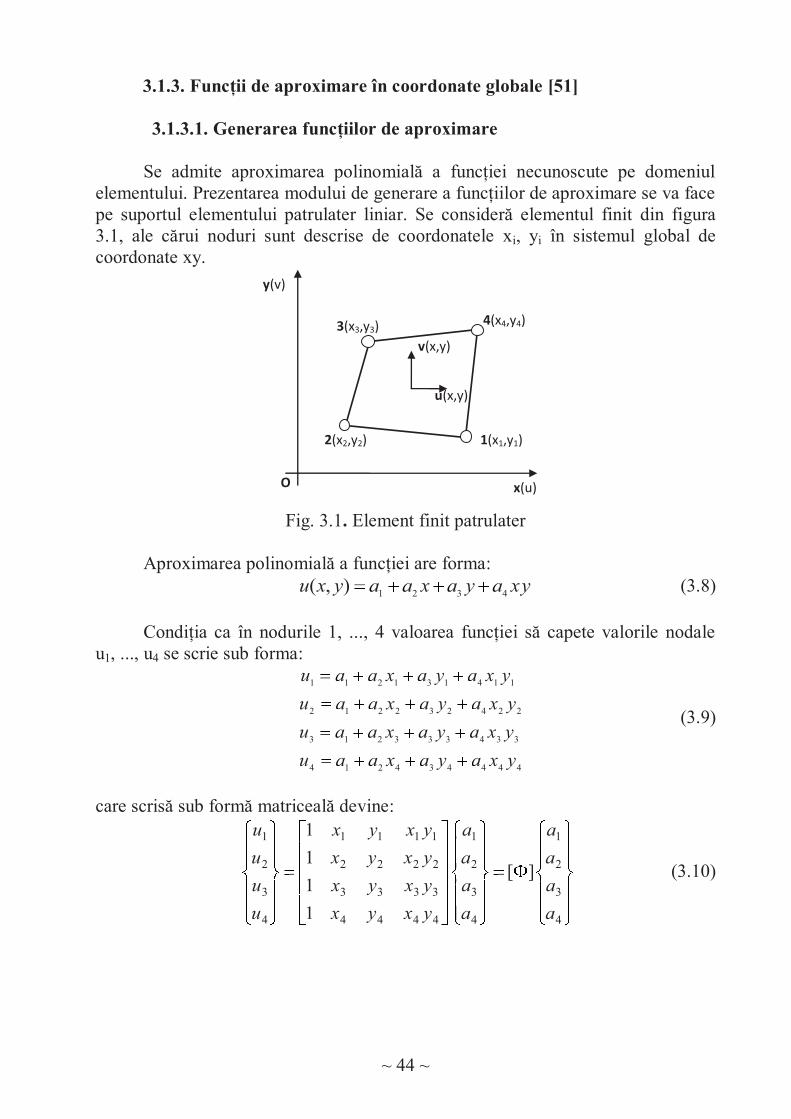
Se admite aproximarea polinomială a funcţiei necunoscute pe domeniul elementului. Prezentarea modului de generare a funcţiilor de aproximare se va face pe suportul elementului patrulater liniar. Se consideră elementul finit din figura 3.1, ale cărui noduri sunt descrise de coordonatele xi, yi în sistemul global de coordonate xy.
Fig. 3.1. Element finit patrulater
Aproximarea polinomială a funcţiei are forma:
yxayaxaayxu 4321),( aaaa (3.8)
Condiţia ca în nodurile 1, ..., 4 valoarea funcţiei să capete valorile nodale u1, ..., u4 se scrie sub forma:
444434214
334333213
224232212
114131211
yxayaxaau
yxayaxaau
yxayaxaau
yxayaxaau
aaaa
aaaa
aaaa
aaaa
(3.9)
care scrisă sub formă matriceală devine:
4
3
2
1
4
3
2
1
4444
3333
2222
1111
4
3
2
1
][
1
1
1
1
a
a
a
a
a
a
a
a
yxyx
yxyx
yxyx
yxyx
u
u
u
u
(3.10)
x(u)
1(x1,y1) 2(x2,y2)
3(x3,y3) 4(x4,y4)
y(v)
v(x,y)
u(x,y)
O

~ 45 ~
Matricea este o matrice de constante conţinând coordonatele nodurilor elementului. Prin inversare se obţin coeficienţii polinomiali:
}{][][ 1
4
3
2
1
1
4
3
2
1
u
u
u
u
u
a
a
a
a
11 ] 1[u
u
uu
u
u
u
] 1[a
a
aa
a
a
a
(3.11)
unde uu este vectorul valorilor nodale necunoscute. Scriind relaţia (3.8) sub formă matriceală şi înlocuind vectorul coeficienţilor polinomiali din (3.11), se obţine relaţia:
4
3
2
1
1][]1[),(
u
u
u
u
yxyxyxu (3.12)
din care se pune în evidenţă matricea funcţiilor de aproximare:
1][]1[)],([ 1] 1[ yxyxyxN (3.13)
Procedeul are mari inconveniente de ordin practic. Inversarea matricei Φ , mai ales în cazul elementelor finite cu multe grade de libertate, este o operaţie dificilă, necesitând timp de calcul sporit şi introducând singularităţi. O altă categorie de dezavantaje este legată de calculul matricelor elementale, când integrarea numerică pe un domeniu V oarecare, aşa cum apare el definit de geometria elementului, este de asemenea o problemă dificilă.
3.1.3.2. Elementul unidimensional bară
Este un element uniaxial definit de nodurile 1 şi 2 în planul xOy, cu secţiunea transversală A şi modulul de elasticitate E (figura 3.2).
Fig. 3.2. Element liniar unidimensional
y
x1 O x x2
y1
y2
s(d)
u1
u2
v1
v2
1
2

~ 46 ~
Lungimile proiecţiilor barei pe axe şi lungimea barei sunt:
12 xxLx
xx 12 yyLy
yy 22
yxLLL L (3.14)
Variaţia deplasării în lungul barei, d(s) se aproximează printr-un polinom de gradul I:
2
121 ]1[)(
a
assaasd (3.15)
Deplasările nodale sunt d1 şi d2 referitoare la axa s şi respectiv (u1,v1) şi (u2,v2) în sistemul global de coordonate. Legătura dintre deplasările d şi proiecţiile u şi v pe sistemul xOy este dată de relaţia:
vL
Lu
L
Ld
yx
L
L
L
L
Coeficienţii polinomului de aproximare se determină din condiţia ca deplasarea d(s) să capete valorile nodale d1 şi d2 la nodurile barei:
11 )0( add ad LaaLdd 212 )( aad Înlocuind a1 şi a2 din expresiile de mai sus, polinomul (3.15) devine:
2
1
121 1)()(d
d
L
s
L
sdd
L
sdsd (3.16)
unde se pune în evidenţă matricea funcţiilor de aproximare L
s
L
sN 1][ .
Deformaţia specifică axială s rezultă prin derivare:
}{][11)(
2
1 }{Bd
d
LLds
sdds [
dd
dd1
L
d (3.17)
În această relaţie apare matricea B de derivate ale funcţiilor de aproximare, iar este notaţia vectorului deplasărilor nodale. Pentru a calcula matricea de rigiditate în sistemul global xOy se evaluează matricea B în raport cu acest sistem. Deplasările nodale se scriu sub forma:
1
1
1v
u
L
L
L
Ld
yx 2
2
2v
u
L
L
L
Ld
yx (3.18)
iar înlocuind aceste expresii în relaţia (3.17) se obţine:
2
2
1
1
2][
1
v
u
v
u
LLLLL
yxyxss (3.19)
~ 47 ~
din care se pune în evidenţă matricea B din sistemul global:
][1
][2 yxyx LLLLL
B LLL
(3.20)
În expresia matricei de rigiditate a elementului (V
T dVBEBk ][][][][ ),
matricea E se reduce la un singur element – modulul de elasticitate E – iar matricea B este o constantă şi iese de sub semnul integrală. Deoarece volumul unui element este A*L, matricea de rigiditate a elementului rezultă în final sub forma:
][][3 yxyx
y
x
y
x
LLLL
L
L
L
L
L
EAk LL[[[
L
L
L
LL
L
L
A (3.21)
Vectorii de încărcare la nivelul elementului nu se mai calculează, încărcările fiind aplicate în noduri sub formă de forţe concentrate.
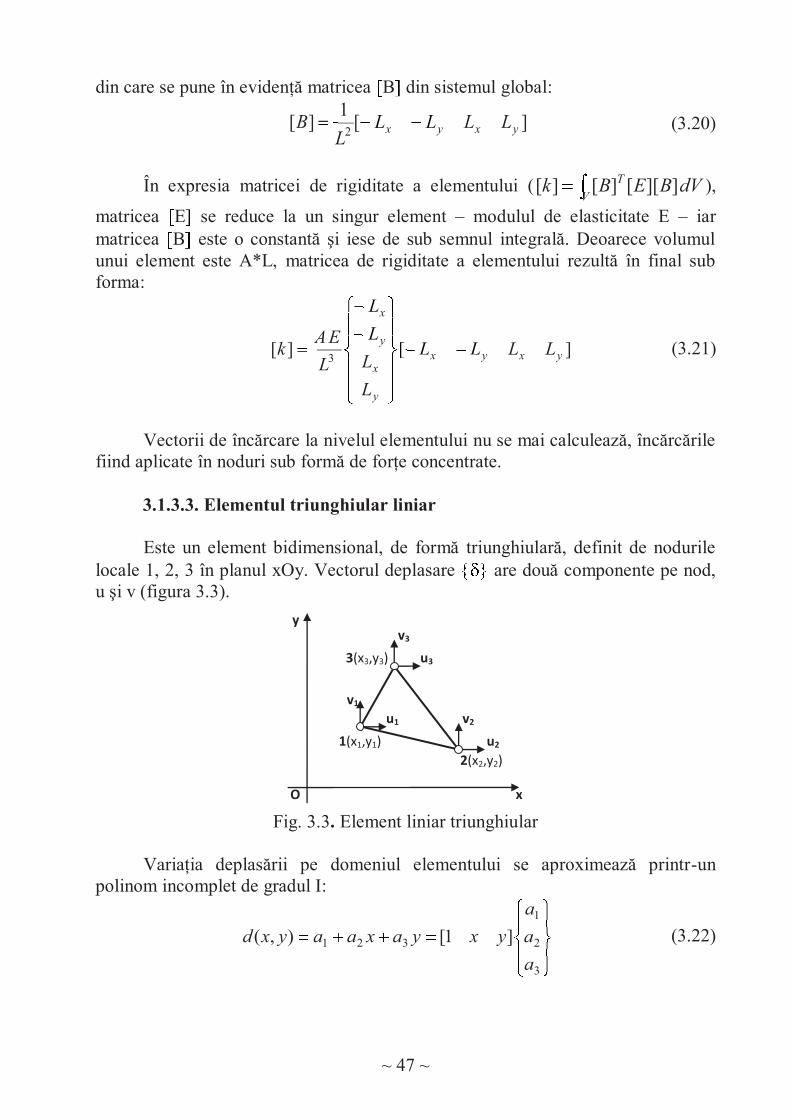
3.1.3.3. Elementul triunghiular liniar
Este un element bidimensional, de formă triunghiulară, definit de nodurile locale 1, 2, 3 în planul xOy. Vectorul deplasare are două componente pe nod, u şi v (figura 3.3).
Fig. 3.3. Element liniar triunghiular
Variaţia deplasării pe domeniul elementului se aproximează printr-un polinom incomplet de gradul I:
3
2
1
321 ]1[),(
a
a
a
yxyaxaayxd (3.22)
y
x O
1(x1,y1)
2(x2,y2)
3(x3,y3)
u1
u2
u3
v1
v2
v3

~ 48 ~
Coeficienţii de aproximare se determină din condiţia ca în nodurile 1, 2 şi 3, d(x,y) să capete valorile nodale 1, 2 şi 3:
}{][
1
1
1
3
2
1
33
22
11
3
2
1
a
a
a
a
yx
yx
yx
{] a[
aa
aa
aa
111
1
1
3
2
1
(3.23)
Prin inversare se obţine dependenţa acestora de valorile nodale şi geometria elementului:
3
2
11][}{
3
2
1
a (3.24)
unde:
123123
211332
1221311323321
2
1][
xxxxxx
yyyyyy
yxyxyxyxyxyx
A (3.25)
este o matrice constantă, cu A notându-se aria triunghiului. Dependenţa deplasării de valorile nodale rezultă prin înlocuirea expresiei (3.24) în relaţia polinomului de aproximare (3.22):
3
2
11][]1[),(
3
2
1
yxyxd (3.26)
care proiectată pe axele Ox şi Oy conduce la:
3
2
11][]1[),(
u
u
u
yxyxu
3
2
11][]1[),(
v
v
v
yxyxv (3.27)
Deformaţiile specifice din interiorul elementului rezultă din relaţiile cunoscute din teoria plana a elasticităţii:
)][]([
][2
1
][2
1
3
2
1
211332
3
2
1
123123
3
2
1
123123
3
2
1
211332
)))[(
2
2
v
v
v
yyyyyy
u
u
u
xxxxxxy
v
y
u
v
v
v
xxxxxxAy
v
u
u
u
yyyyyyAx
u
xy
y
x
xy
y
x
~ 49 ~
În formă matriceală, acestea se scriu:
3
3
2
2
1
1
211213313223
123123
211332
000
000
}{
v
u
v
u
v
u
yyxxyyxxyyxx
xxxxxx
yyyyyy
xy
y
x
xy
y
x
}{
sau sub formă restrânsă: }]{[}{ }{}{ B[ (3.28)
ceea ce pune în evidenţă matricea deformaţie specifică – deplasare. După cum se observă B =ct şi deci deformaţiile specifice sunt constante pe domeniul elementului. De aceea denumirea elementului este „element triunghiular cu deformaţie constantă”. Matricea de rigiditate a elementului:
V
T dVBEBk ][][][][
Matricea Hooke generalizată E are, pentru materiale izotrope, una dintre formele:
- stare de efort plan:
2
100
01
01
1][
22
EE
- stare de deformaţie plană:
)1(2
2100
01
01
1
)21()1(
)1(][
)
)()
)EE
Elementul de volum dV are forma dydxtdV t , unde t este grosimea
elementului (t=1 în cazul stării de deformaţie plană). Matricele B şi E fiind matrice de constante, rezultă expresia matricei de rigiditate sub forma:
AtBEBk T ][][][][ [ (3.29)
Vectorul forţelor nodale provenite din eforturile iniţiale şi forţele masice este dat de relaţia:
V V
TT dVfNdVBr }{][}{][}{ 0{ 0 (3.30)
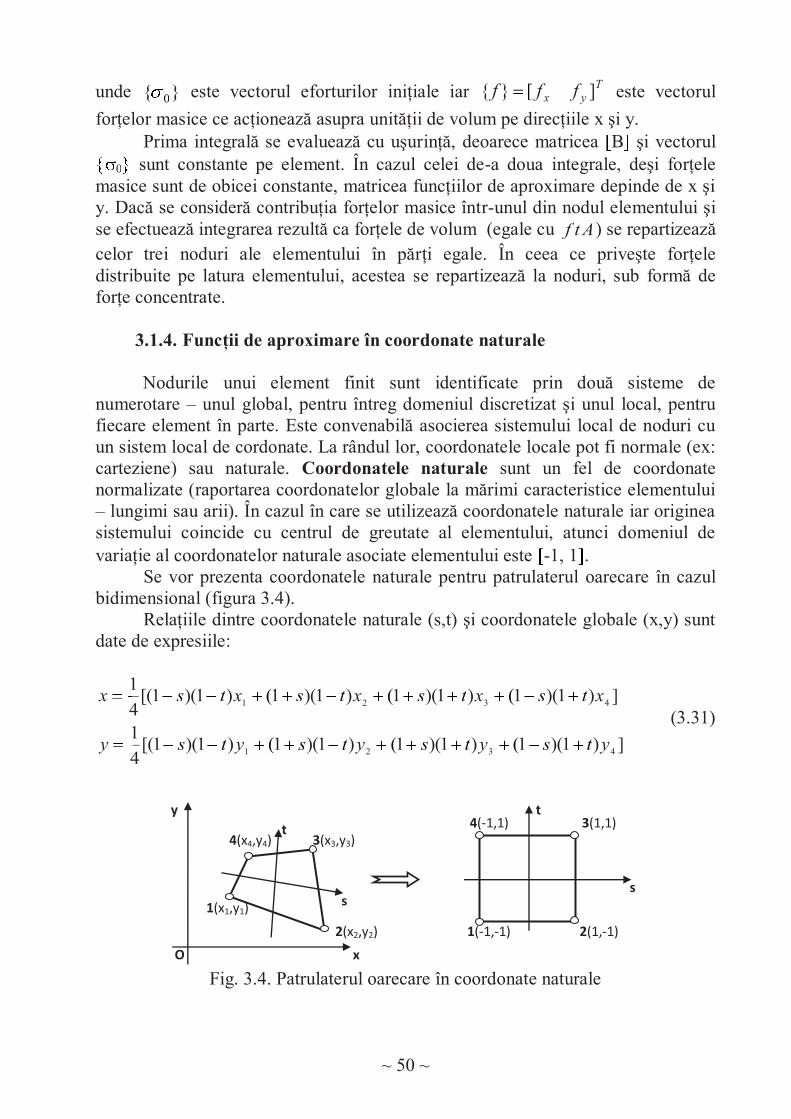
~ 50 ~
unde }{ 0{ 0 este vectorul eforturilor iniţiale iar Tyx fff ][}{ [ este vectorul
forţelor masice ce acţionează asupra unităţii de volum pe direcţiile x şi y. Prima integrală se evaluează cu uşurinţă, deoarece matricea
şB
y şi vectorul
00 sunt constante pe element. În cazul celei de-a doua integrale, deşi forţele masice sunt de obicei constante, matricea funcţiilor de aproximare depinde de x şi y. Dacă se consideră contribuţia forţelor masice într-unul din nodul elementului şi se efectuează integrarea rezultă ca forţele de volum (egale cu Atf ) se repartizează celor trei noduri ale elementului în părţi egale. În ceea ce priveşte forţele distribuite pe latura elementului, acestea se repartizează la noduri, sub formă de forţe concentrate.
3.1.4. Funcţii de aproximare în coordonate naturale
Nodurile unui element finit sunt identificate prin două sisteme de numerotare – unul global, pentru întreg domeniul discretizat şi unul local, pentru fiecare element în parte. Este convenabilă asocierea sistemului local de noduri cu un sistem local de cordonate. La rândul lor, coordonatele locale pot fi normale (ex: carteziene) sau naturale. Coordonatele naturale sunt un fel de coordonate normalizate (raportarea coordonatelor globale la mărimi caracteristice elementului – lungimi sau arii). În cazul în care se utilizează coordonatele naturale iar originea sistemului coincide cu centrul de greutate al elementului, atunci domeniul de variaţie al coordonatelor naturale asociate elementului este -1, 1 . Se vor prezenta coordonatele naturale pentru patrulaterul oarecare în cazul bidimensional (figura 3.4). Relaţiile dintre coordonatele naturale (s,t) şi coordonatele globale (x,y) sunt date de expresiile:
])1)(1()1)(1()1)(1()1)(1[(4
1
])1)(1()1)(1()1)(1()1)(1[(4
1
4321
4321
ytsytsytsytsy
xtsxtsxtsxtsx
ts(ts(ts(ts4
1
ts(ts(ts(ts4
1
(3.31)
Fig. 3.4. Patrulaterul oarecare în coordonate naturale
t
s
t
s
x
y
O
2(x2,y2)
1(x1,y1)
3(x3,y3) 4(x4,y4)
2(1,-1) 1(-1,-1)
3(1,1) 4(-1,1)

~ 51 ~
Într-o scriere mai concisă, relaţiile de transformare au forma:
4
1
4
1 iii
iii
yLyxLx (3.32)
unde )1()1(4
1iiittssL ts
4
1, (xi, yi) fiind coordonatele nodului „i” în sistemul xy
iar (si,ti) fiind coordonatele nodului „i” în sistemul st. În cadrul coordonatelor naturale, funcţiile de aproximare Ni pot fi deduse mai uşor. Se ţine seama de faptul că funcţiile de aproximare au proprietatea Ni=1 pentru nodul „i” şi Ni=0 pentru celelalte noduri. Expresiile funcţiilor de aproximare pentru elementul plan patrulater sunt:
Element liniar (4 noduri)
1,)1()1(4
1),( 1
4
1iiiiitscuttsstsN
Element pătratic (8 noduri)
0,17,5)1()1(2
1),(
1,08,6)1()1(2
1),(
1,4,,1)1)(1)(1(4
1),(
2
2
0,12
1
102
1
114
1
tslanodurilepentrutsstsN
tslanodurilepentruttstsN
tscunodurilepentruttssttsstsN
iii
iii
iiiiiiiK
Element cubic (12 noduri)
3
1,110,9,6,5)91()1()1(
32
93
1,112,11,8,7)91()1()1(
32
9
1,4,,1]10)(9[)1()1(32
1
2
2
22
3
1,19
3
3
1,19
3
113
iiiii
iiiii
iiiii
stcunodurilepentrusssttN
tscunodurilepentrutttssN
tscunodurilepentrutsttssN K
Avantajul exprimării funcţiilor de aproximare în coordonate naturale este evident: pentru orice element finit, indiferent de geometria particulară a acestuia, funcţiile de aproximare sunt unice, bine definite şi uşor de verificat intuitiv.
3.1.5. Elemente izoparametrice
Elementele izoparametrice utilizează sistemul de coordonate naturale pentru definirea funcţiilor de aproximare şi integrarea Gauss, proprie domeniului de variaţie al acestor coordonate, pentru evaluarea matricelor elementale. Pentru trecerea din sistemul global de coordonate xyz în sistemul natural de coordonate st, se folosesc relaţii de transformare de forma (3.32) în care funcţiile Li(s,t,r) se aleg identice cu funcţiile de aproximare Ni(s,t,r). Această identitate dintre relaţiile de

~ 52 ~
transformare de coordonate şi de aproximare a variabilei pe domeniul elementului a dat denumirea de „izoparametrie”. În cele ce urmează se va prezenta elementul izoparametric 2D liniar.
Fig. 3.5. Elementul izoparametric 2D liniar
Se consideră elementul patrulater cu 4 noduri din figura 3.5, având 8 grade de libertate şi anume deplasările ui, vi în fiecare nod i. În sistemul de coordonate naturale st funcţiile de aproximare au forma dată de relaţiile:
)1()1(4
1)1()1(
4
1
)1()1(4
1)1()1(
4
1
43
21
tsNtsN
tsNtsN
ts4
1ts
4
1
ts4
1ts
4
1
(3.33)
iar componentele vectorului deplasare se exprimă prin intermediul acestora în funcţie de valorile nodale:
4433221144332211 ),(),( vNvNvNvNtsvuNuNuNuNtsu NNNNNNNN (3.34)
Într-o formă restrânsă, aceleaşi relaţii devin:
4
4
1
1
4321
4321
0000
0000),(
v
u
v
u
NNNN
NNNN
v
utsd M (3.35)
Trecerea din sistemul de coordonate global xz în sistemul natural st se face utilizând tot funcţiile de aproximare:
4433221144332211 yNyNyNyNyxNxNxNxNx NNNNNNNN (3.36)
y(v)
x(u)
y1
x1
u1
v1
v2
u2
v3
u3
v4
u4
2
1
3 4
s
t
s=+1 s=-1
t=-1
t=+1
O

~ 53 ~
În formă matriceală relaţia (3.36) se scrie sub forma:
4
4
1
1
4321
4321
0000
0000
),(
),(
y
x
y
x
NNNN
NNNN
tsy
tsxM (3.37)
Pentru calculul matricelor şi vectorilor caracteristici elementului este necesar sa se exprime şi matricea [B] în sistemul natural st, această matrice exprimând legătura dintre deformaţiile specifice şi deplasările nodale - {ε}=[B]{δ}. Deformaţiile specifice {ε} conţin derivate ale deplasărilor u şi v în raport cu coordonatele globale x şi y.
t
y
y
u
t
x
x
u
t
u
s
y
y
u
s
x
x
u
s
u
t
y
y
u
t
x
x
u
t
u
s
y
y
u
s
x
x
u
s
u
Utilizând notaţiile ( ),s – derivată parţială în raport cu s, ( ),y – derivată parţială în raport cu y etc., relaţiile dintre derivate pot fi scrise sub formă matriceală :
y
xJ
y
x
tytx
sysx
t
s
),(
),(][
),(
),(
,,
,,
),(
),( (3.38)
unde [J] este matricea Jacobianului transformării. Ţinând seama de relaţia (3.37), Jacobianul se poate scrie sub forma:
44
33
22
11
,4,3,2,1
,4,3,2,1)],([
yx
yx
yx
yx
NNNN
NNNNtsJ
tttt
ssss (3.39)
care se poate explicita cu uşurinţă ţinând seama de (3.33). Prin inversarea relaţiei (3.38) se pot exprima derivatele în raport cu x şi y în funcţie de cele în raport cu s şi t:
1][][,),(
),(][
),(
),( 1[((
(([
((
((JJ
t
sJ
y
x (3.40)
~ 54 ~
Pe baza relaţiei (3.40) se determină derivatele deplasărilor u şi v:
4
4
1
1
,4,3,2,1
,4,3,2,1
,4,3,2,1
,4,3,2,1
2221
1211
2221
1211
,
,
,
,
2221
1211
2221
1211
,
,
,
,
0000
0000
0000
0000
00
00
00
00
00
00
00
00
v
u
v
u
NNNN
NNNN
NNNN
NNNN
JJ
JJ
JJ
JJ
v
v
u
u
JJ
JJ
JJ
JJ
v
v
u
u
tttt
ssss
tttt
ssss
t
s
t
s
y
x
y
x
M
Ţinând seama de expresiile deformaţiilor specifice:
y
x
y
x
xy
y
x
v
v
u
u
,
,
,
,
0110
1000
0001
}{
xy
y
x
}{ , se obţine matricea [B(s,t)].
Sub forma prezentată, matricele [N(s,t)] şi [B(s,t)] sunt cunoscute şi pot fi evaluate numeric în orice punct al elementului. În expresia vectorului de încărcare {r} mai intervin {σ0}, {f} şi {p}. Primii doi vectori sunt uzual constanţi pe domeniul elementului. Presiunea {p} acţionează pe una sau mai multe laturi ale elementului. Admiţând că variaţia acesteia pe latură este descrisă tot de funcţiile de aproximare în funcţie de valorile presiunii la noduri, termenul din {r} corespunzător forţelor nodale din presiune capătă forma
dSp
ptsNtsN
j
i
S
T ddpp
pp
S)],([)],([ , unde i şi j sunt nodurile care definesc latura
încărcată, iar pi şi pj sunt valorile presiunii la noduri. Pentru matricele şi vectorii elementului se obţin integralele:
V
dtdstsJtsFdydxtsF1
1
1
1
)],(det[),(),( (3.40)
3.1.6. Condiţii de convergenţă şi compatibilitate
O soluţie obţinută prin intermediul metodei elementelor finite este o solutie
aproximativă. Domeniul de studiu este discretizat şi variaţia reală a funcţiei necunoscute este înlocuită cu variaţii locale, pe domeniul elementelor, în funcţie de valorile nodale. Dacă soluţia se ameliorează succesiv, tinzând către soluţia exactă, atunci când dimensiunile elementelor se reduc (numărul gradelor de
~ 55 ~
libertate creşte) atunci convergenţa este asigurată. Convergenţa se realizează dacă funcţiile de aproximare satisfac anumite condiţii. Acestea sunt:
funcţiile de aproximare trebuie să conducă la deformaţii specifice nule atunci
când deplasările nodurilor elementului corespund unei mişcări de solid rigid; funcţiile de aproximare trebuie să conducă la deformaţii specifice constante pe
domeniul elementului dacă încărcările (sau deplasările) nodurilor corespund unei stări de deformaţie specifică constantă;
funcţiile de aproximare trebuie să conducă la valori finite ale deformaţiilor specifice la graniţele dintre elemente.
În afara acestor condiţii, pentru obţinerea unor soluţii care să conveargă monoton către soluţia exactă pe măsură ce numărul de grade de libertate creşte mai trebuie îndeplinite criteriile:
Compatibilitatea între elemente. La graniţele dintre ele, elementele trebuie să rămână în contact, fără să se separe sau să se suprapună. În cazul plăcilor plane sau curbe se cere de asemenea ca tangentele la suprafaţa medie deformată să fie identice la graniţă.
Lipsa de direcţii preferenţiale în element. Sub acţiunea unor forţe cu orientare fixă faţă de element „răspunsul” acestuia trebuie să fie identic indiferent de orientarea lui faţă de sistemul global de coordonate xyz.
În cazul elementelor izoparametrice, care au de fapt cea mai largă utilizare, condiţiile de convergenţă şi compatibilitate sunt riguros îndeplinite, funcţiile de aproximare fiind alese ţinând seama de aceste condiţii.
3.2. INFLUENŢA GRADULUI DE RAFINARE AL DISCRETIZĂRII
ASUPRA MODURILOR PROPRII DE VIBRAŢIE DETERMINATE PRIN CALCUL 3.2.1. Introducere
În rezolvarea oricărei structuri, alegerea modelului este o problemă
fundamentală deoarece întreaga analiză se referă la model şi nu la structură. Descrierea analitică a comportării unui sistem dinamic se exprimă pe baza unui model matematic. Modelul matematic devine identic cu modelul dinamic atunci când toate caracteristicile de definire ale sistemului dinamic sunt complet precizate din punct de vedere fizic. O alterare a caracteristicilor de definire poate conduce la rezultate nu numai incorecte, ci chiar la falsificarea fenomenelor reale. Teza de doctorat abordează sistemele dinamice structurale cu comportare liniară. Indiferent dacă se efectuează analiza modală a răspunsului dinamic sau dacă ecuaţiile diferenţiale se integrează direct, variaţia modurilor proprii de vibraţie este măsura variaţiei răspunsului dinamic al structurilor la orice acţiuni. De aceea, în prezenta teză se acordă o atenţie deosebită influenţei gradului de rafinare al discretizării asupra modurilor proprii de vibraţie determinate prin calcul.
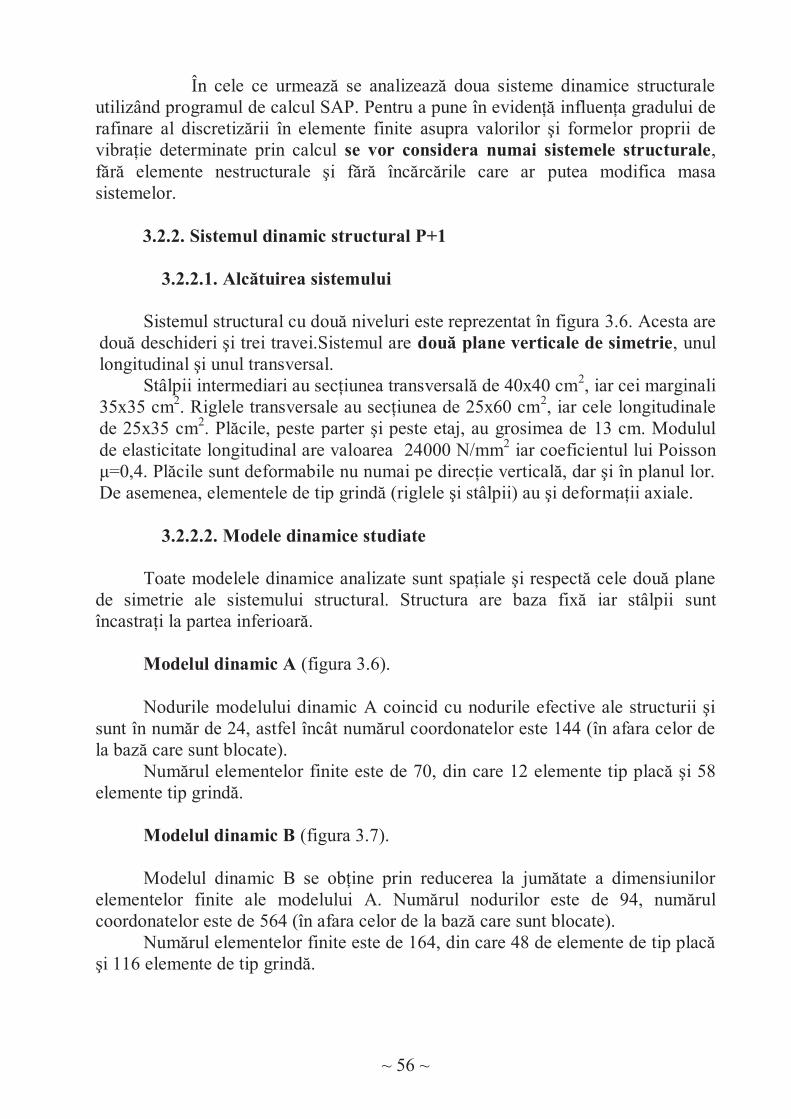
~ 56 ~
În cele ce urmează se analizează doua sisteme dinamice structurale utilizând programul de calcul SAP. Pentru a pune în evidenţă influenţa gradului de rafinare al discretizării în elemente finite asupra valorilor şi formelor proprii de vibraţie determinate prin calcul se vor considera numai sistemele structurale, fără elemente nestructurale şi fără încărcările care ar putea modifica masa sistemelor.
3.2.2. Sistemul dinamic structural P+1
3.2.2.1. Alcătuirea sistemului
Sistemul structural cu două niveluri este reprezentat în figura 3.6. Acesta are două deschideri şi trei travei.Sistemul are două plane verticale de simetrie, unul longitudinal şi unul transversal.
Stâlpii intermediari au secţiunea transversală de 40x40 cm2, iar cei marginali 35x35 cm2. Riglele transversale au secţiunea de 25x60 cm2, iar cele longitudinale de 25x35 cm2. Plăcile, peste parter şi peste etaj, au grosimea de 13 cm. Modulul de elasticitate longitudinal are valoarea 24000 N/mm2 iar coeficientul lui Poisson μ=0,4. Plăcile sunt deformabile nu numai pe direcţie verticală, dar şi în planul lor. De asemenea, elementele de tip grindă (riglele şi stâlpii) au şi deformaţii axiale.
3.2.2.2. Modele dinamice studiate
Toate modelele dinamice analizate sunt spaţiale şi respectă cele două plane de simetrie ale sistemului structural. Structura are baza fixă iar stâlpii sunt încastraţi la partea inferioară. Modelul dinamic A (figura 3.6). Nodurile modelului dinamic A coincid cu nodurile efective ale structurii şi sunt în număr de 24, astfel încât numărul coordonatelor este 144 (în afara celor de la bază care sunt blocate). Numărul elementelor finite este de 70, din care 12 elemente tip placă şi 58 elemente tip grindă. Modelul dinamic B (figura 3.7). Modelul dinamic B se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale modelului A. Numărul nodurilor este de 94, numărul coordonatelor este de 564 (în afara celor de la bază care sunt blocate). Numărul elementelor finite este de 164, din care 48 de elemente de tip placă şi 116 elemente de tip grindă.
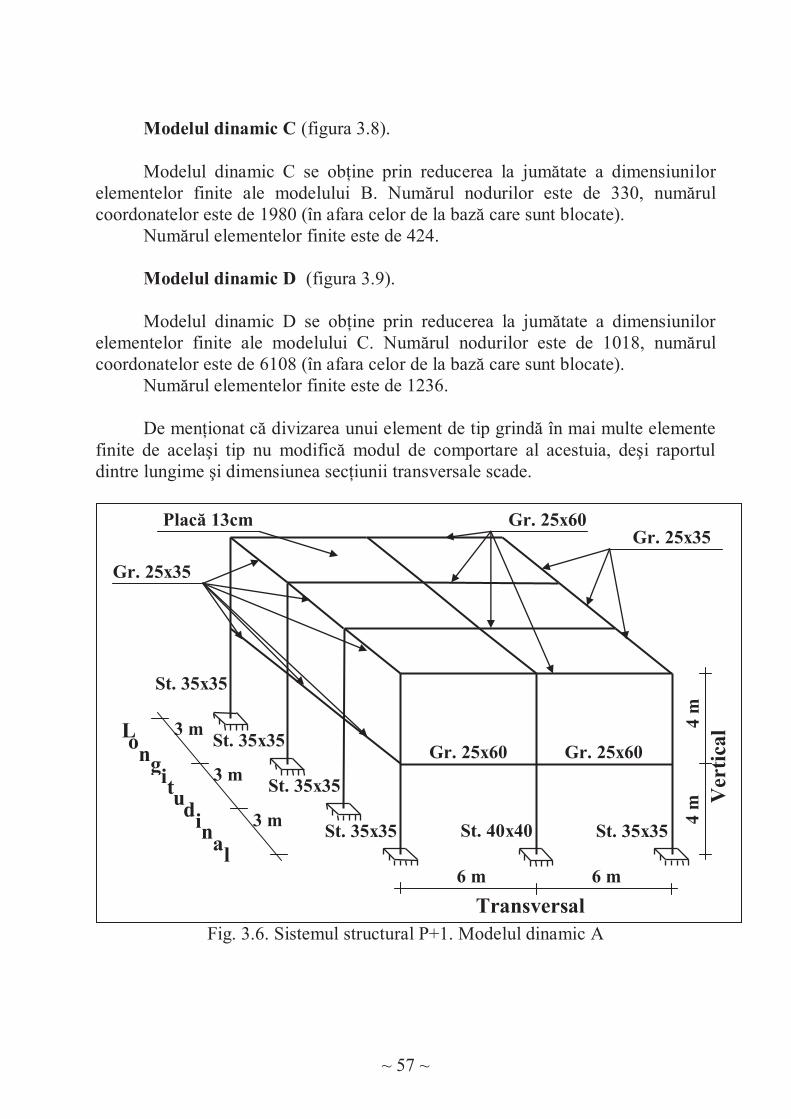
~ 57 ~
Modelul dinamic C (figura 3.8). Modelul dinamic C se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale modelului B. Numărul nodurilor este de 330, numărul coordonatelor este de 1980 (în afara celor de la bază care sunt blocate). Numărul elementelor finite este de 424. Modelul dinamic D (figura 3.9).
Modelul dinamic D se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale modelului C. Numărul nodurilor este de 1018, numărul coordonatelor este de 6108 (în afara celor de la bază care sunt blocate).
Numărul elementelor finite este de 1236. De menţionat că divizarea unui element de tip grindă în mai multe elemente finite de acelaşi tip nu modifică modul de comportare al acestuia, deşi raportul dintre lungime şi dimensiunea secţiunii transversale scade.
Fig. 3.6. Sistemul structural P+1. Modelul dinamic A
Gr. 25x35
St. 35x35
St. 35x35
St. 35x35
St. 35x35 St. 35x35 St. 40x40
Gr. 25x60 Gr. 25x60
Gr. 25x35 Gr. 25x60 Placă 13cm
6 m 6 m
Transversal
4 m
4
m Ver
tica
l 3 m
3 m
3 m
Lo n g i t u d i n a l
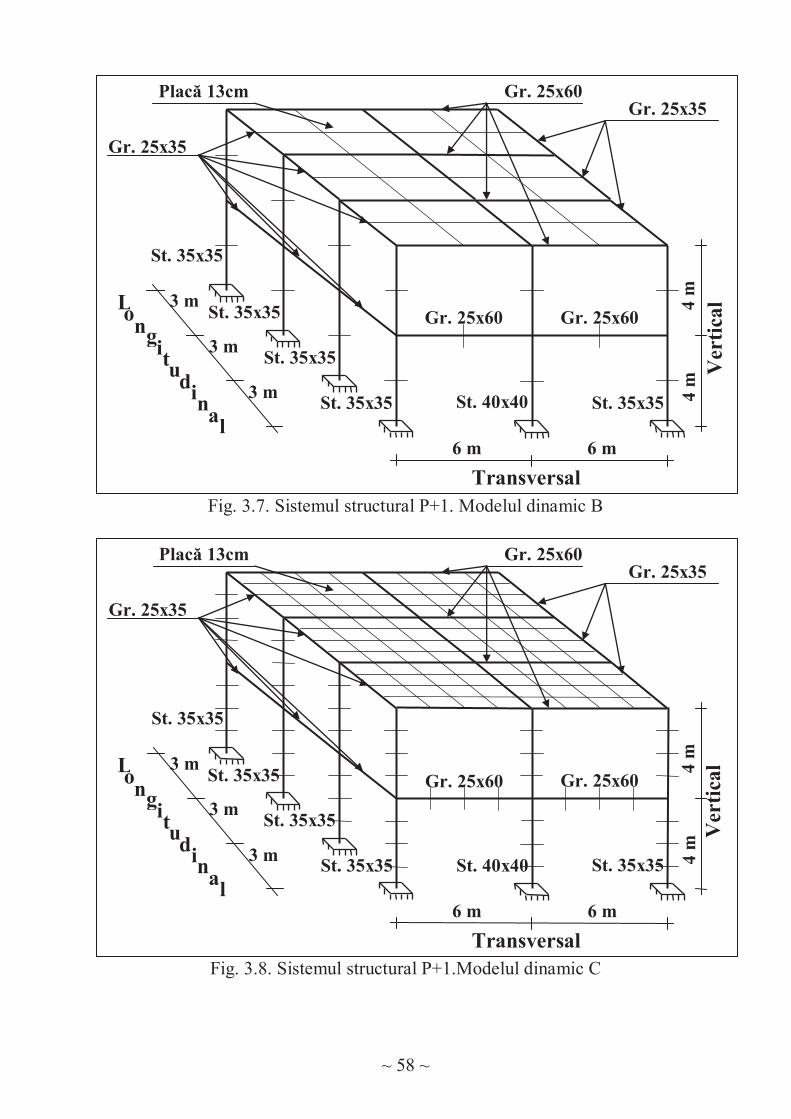
~ 58 ~
Fig. 3.7. Sistemul structural P+1. Modelul dinamic B
Fig. 3.8. Sistemul structural P+1.Modelul dinamic C
Gr. 25x35
St. 35x35
St. 35x35
St. 35x35
St. 35x35 St. 35x35 St. 40x40
Gr. 25x60 Gr. 25x60
Gr. 25x35 Gr. 25x60 Placă 13cm
6 m 6 m
Transversal
4 m
4
m V
erti
cal 3 m
3 m
3 m
Lo n g i t u d i n a l
Gr. 25x35
St. 35x35
St. 35x35
St. 35x35
St. 35x35 St. 35x35 St. 40x40
Gr. 25x60 Gr. 25x60
Gr. 25x35 Gr. 25x60 Placă 13cm
6 m 6 m
Transversal
4 m
4
m V
erti
cal 3 m
3 m
3 m
Lo n g i t u d i n a l
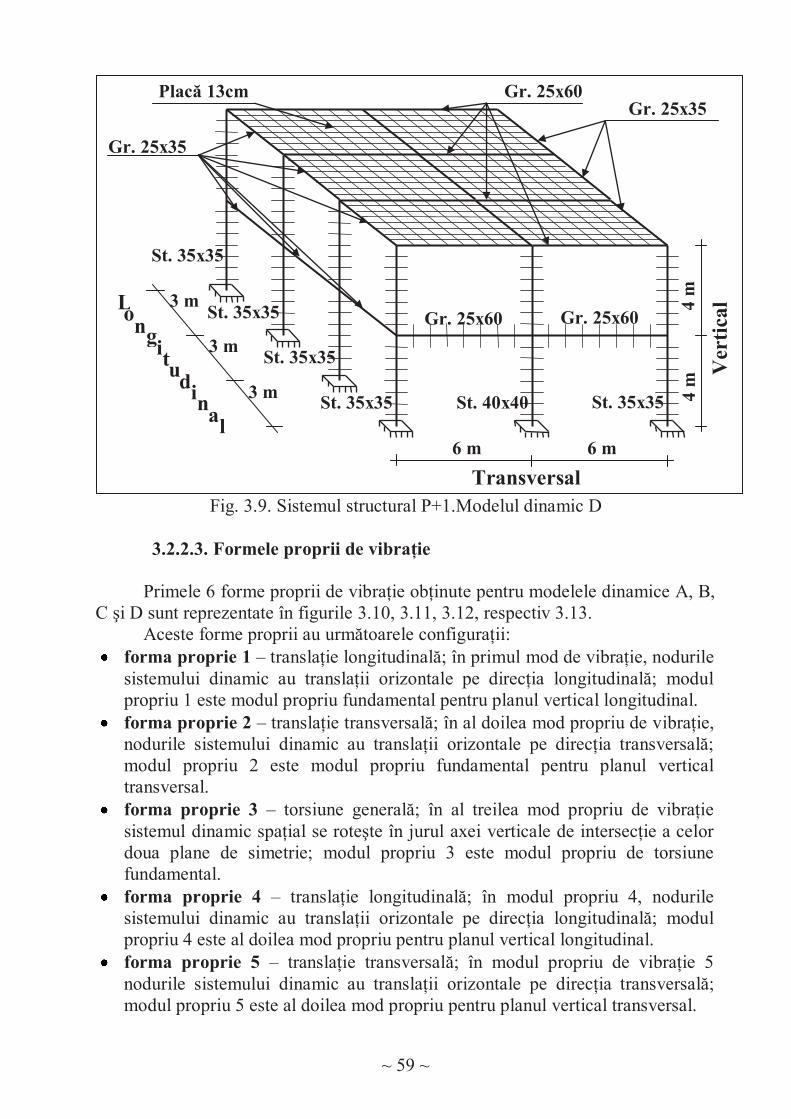
~ 59 ~
Fig. 3.9. Sistemul structural P+1.Modelul dinamic D
3.2.2.3. Formele proprii de vibraţie
Primele 6 forme proprii de vibraţie obţinute pentru modelele dinamice A, B, C şi D sunt reprezentate în figurile 3.10, 3.11, 3.12, respectiv 3.13.
Aceste forme proprii au următoarele configuraţii: forma proprie 1 – translaţie longitudinală; în primul mod de vibraţie, nodurile
sistemului dinamic au translaţii orizontale pe direcţia longitudinală; modul propriu 1 este modul propriu fundamental pentru planul vertical longitudinal.
forma proprie 2 – translaţie transversală; în al doilea mod propriu de vibraţie, nodurile sistemului dinamic au translaţii orizontale pe direcţia transversală; modul propriu 2 este modul propriu fundamental pentru planul vertical transversal.
forma proprie 3 – torsiune generală; în al treilea mod propriu de vibraţie sistemul dinamic spaţial se roteşte în jurul axei verticale de intersecţie a celor doua plane de simetrie; modul propriu 3 este modul propriu de torsiune fundamental.
forma proprie 4 – translaţie longitudinală; în modul propriu 4, nodurile sistemului dinamic au translaţii orizontale pe direcţia longitudinală; modul propriu 4 este al doilea mod propriu pentru planul vertical longitudinal.
forma proprie 5 – translaţie transversală; în modul propriu de vibraţie 5 nodurile sistemului dinamic au translaţii orizontale pe direcţia transversală; modul propriu 5 este al doilea mod propriu pentru planul vertical transversal.
Gr. 25x35
St. 35x35
St. 35x35
St. 35x35
St. 35x35 St. 35x35 St. 40x40
Gr. 25x60 Gr. 25x60
Gr. 25x35 Gr. 25x60 Placă 13cm
6 m 6 m
Transversal
4 m
4
m V
erti
cal 3 m
3 m
3 m
Lo n g i t u d i n a l
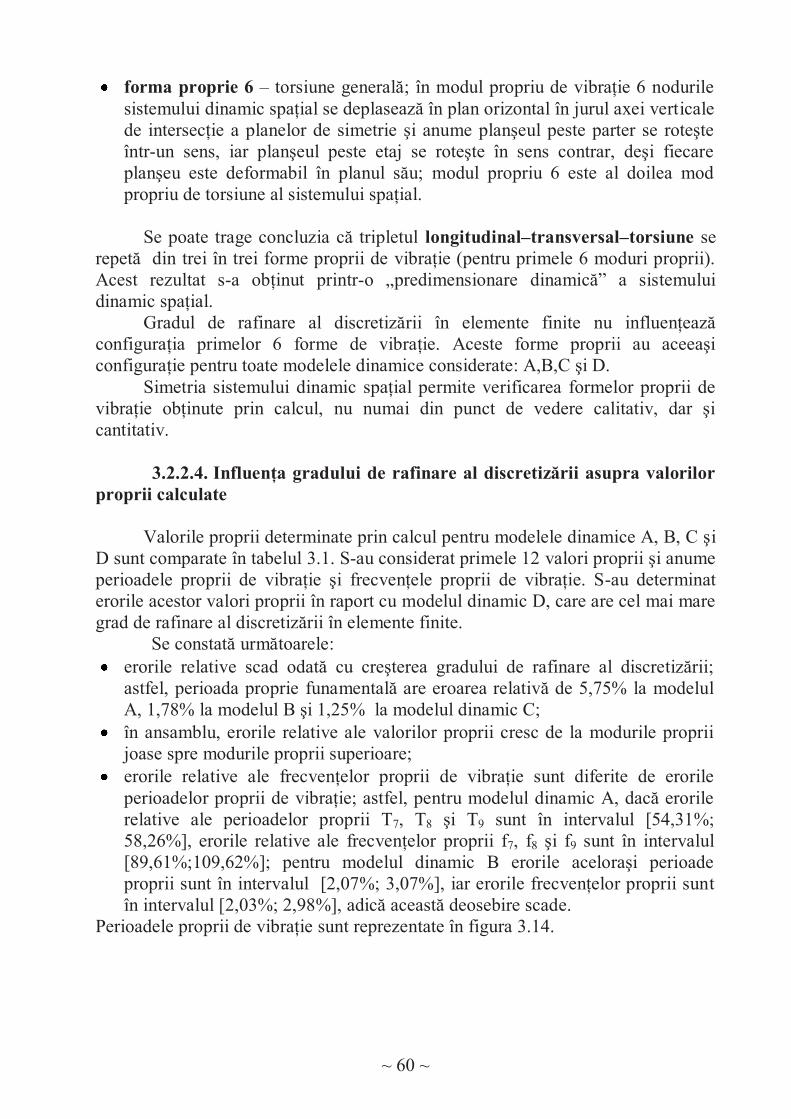
~ 60 ~
forma proprie 6 – torsiune generală; în modul propriu de vibraţie 6 nodurile sistemului dinamic spaţial se deplasează în plan orizontal în jurul axei verticale de intersecţie a planelor de simetrie şi anume planşeul peste parter se roteşte într-un sens, iar planşeul peste etaj se roteşte în sens contrar, deşi fiecare planşeu este deformabil în planul său; modul propriu 6 este al doilea mod propriu de torsiune al sistemului spaţial.
Se poate trage concluzia că tripletul longitudinal–transversal–torsiune se
repetă din trei în trei forme proprii de vibraţie (pentru primele 6 moduri proprii). Acest rezultat s-a obţinut printr-o „predimensionare dinamică” a sistemului dinamic spaţial.
Gradul de rafinare al discretizării în elemente finite nu influenţează configuraţia primelor 6 forme de vibraţie. Aceste forme proprii au aceeaşi configuraţie pentru toate modelele dinamice considerate: A,B,C şi D.
Simetria sistemului dinamic spaţial permite verificarea formelor proprii de vibraţie obţinute prin calcul, nu numai din punct de vedere calitativ, dar şi cantitativ.
3.2.2.4. Influenţa gradului de rafinare al discretizării asupra valorilor proprii calculate
Valorile proprii determinate prin calcul pentru modelele dinamice A, B, C şi D sunt comparate în tabelul 3.1. S-au considerat primele 12 valori proprii şi anume perioadele proprii de vibraţie şi frecvenţele proprii de vibraţie. S-au determinat erorile acestor valori proprii în raport cu modelul dinamic D, care are cel mai mare grad de rafinare al discretizării în elemente finite.
Se constată următoarele: erorile relative scad odată cu creşterea gradului de rafinare al discretizării;
astfel, perioada proprie funamentală are eroarea relativă de 5,75% la modelul A, 1,78% la modelul B şi 1,25% la modelul dinamic C;
în ansamblu, erorile relative ale valorilor proprii cresc de la modurile proprii joase spre modurile proprii superioare;
erorile relative ale frecvenţelor proprii de vibraţie sunt diferite de erorile perioadelor proprii de vibraţie; astfel, pentru modelul dinamic A, dacă erorile relative ale perioadelor proprii T7, T8 şi T9 sunt în intervalul [54,31%; 58,26%], erorile relative ale frecvenţelor proprii f7, f8 şi f9 sunt în intervalul [89,61%;109,62%]; pentru modelul dinamic B erorile aceloraşi perioade proprii sunt în intervalul [2,07%; 3,07%], iar erorile frecvenţelor proprii sunt în intervalul [2,03%; 2,98%], adică această deosebire scade.
Perioadele proprii de vibraţie sunt reprezentate în figura 3.14.
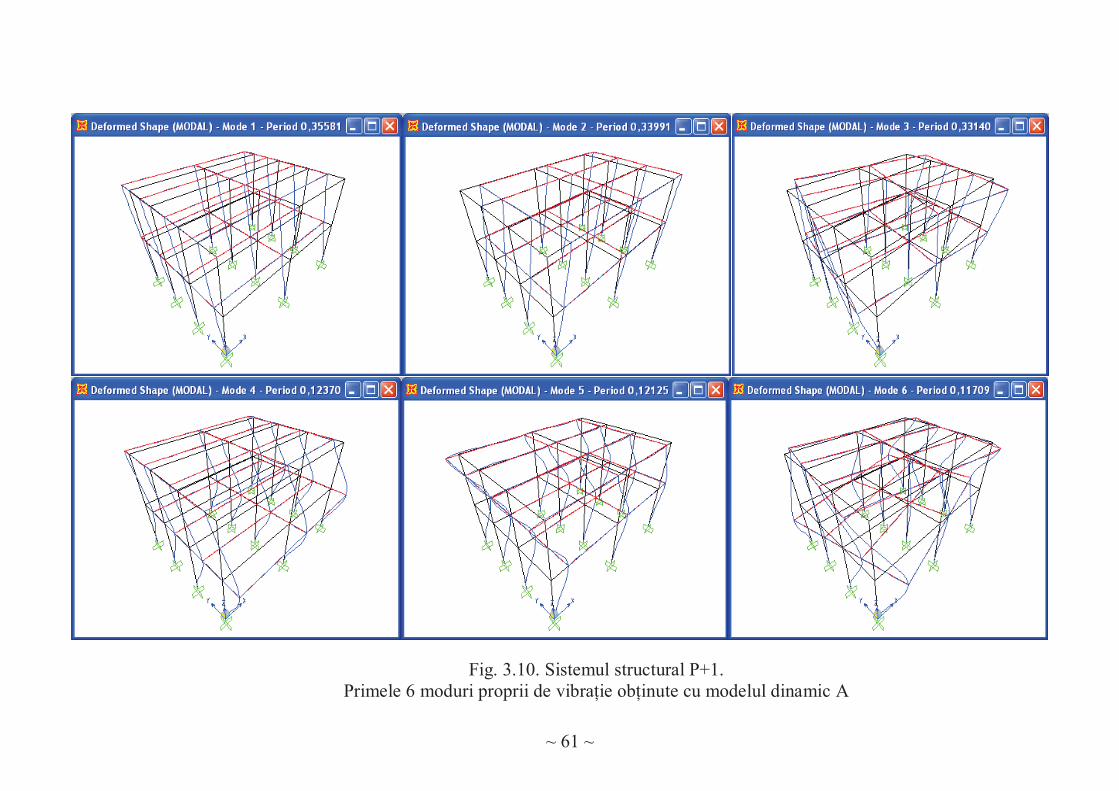
~ 61 ~
Fig. 3.10. Sistemul structural P+1. Primele 6 moduri proprii de vibraţie obţinute cu modelul dinamic A
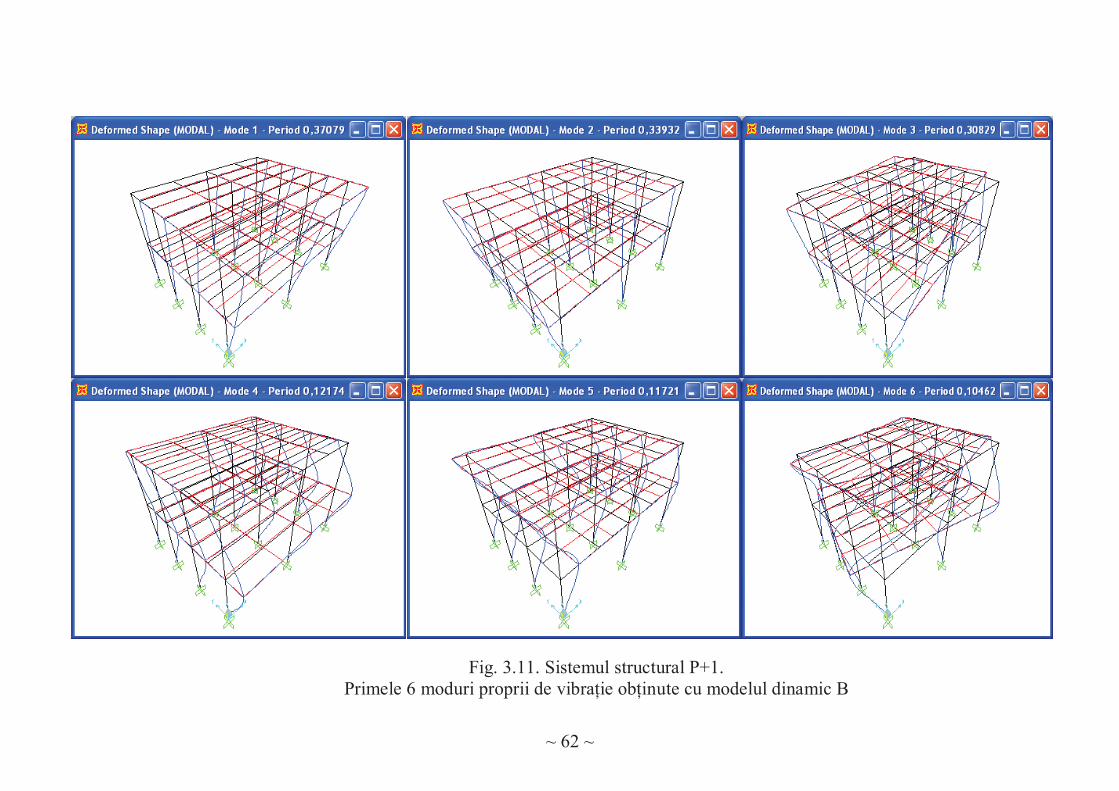
~ 62 ~
Fig. 3.11. Sistemul structural P+1. Primele 6 moduri proprii de vibraţie obţinute cu modelul dinamic B
~ 63 ~
Fig. 3.12. Sistemul structural P+1. Primele 6 moduri proprii de vibraţie obţinute cu modelul dinamic C
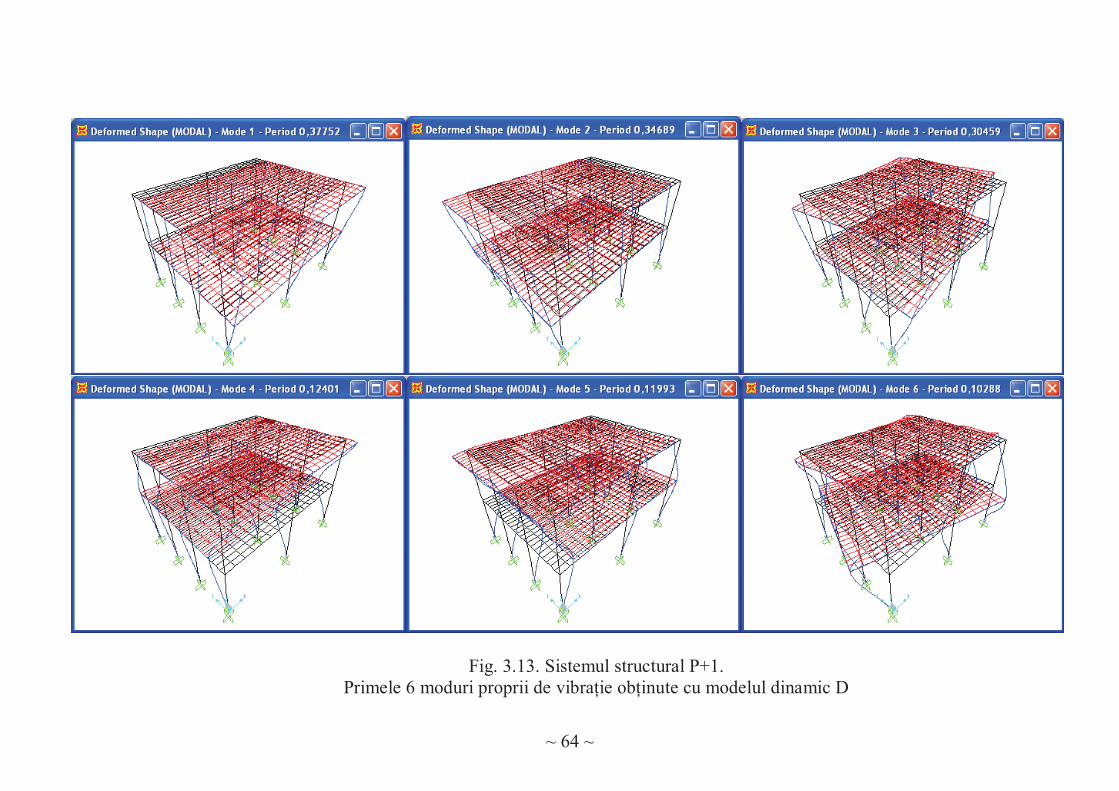
~ 64 ~
Fig. 3.13. Sistemul structural P+1. Primele 6 moduri proprii de vibraţie obţinute cu modelul dinamic D
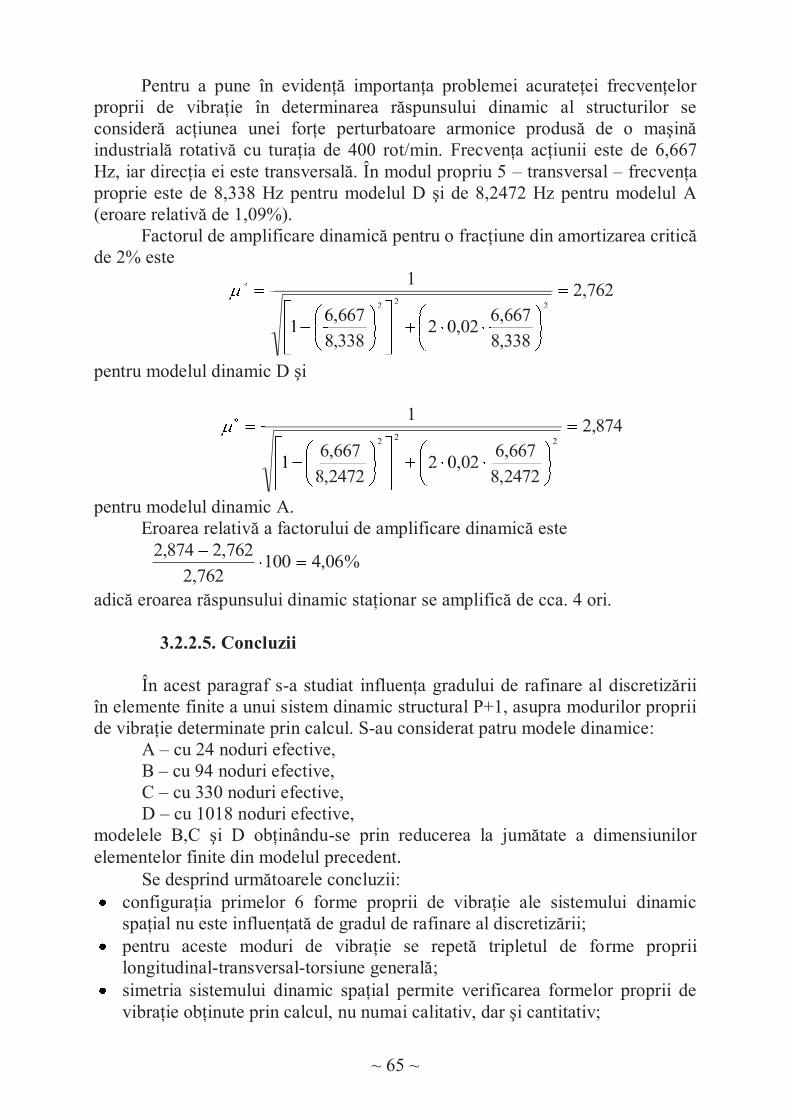
~ 65 ~
Pentru a pune în evidenţă importanţa problemei acurateţei frecvenţelor proprii de vibraţie în determinarea răspunsului dinamic al structurilor se consideră acţiunea unei forţe perturbatoare armonice produsă de o maşină industrială rotativă cu turaţia de 400 rot/min. Frecvenţa acţiunii este de 6,667 Hz, iar direcţia ei este transversală. În modul propriu 5 – transversal – frecvenţa proprie este de 8,338 Hz pentru modelul D şi de 8,2472 Hz pentru modelul A (eroare relativă de 1,09%).
Factorul de amplificare dinamică pentru o fracţiune din amortizarea critică de 2% este
762,2
338,8
667,602,02
338,8
667,61
1222
22
2226
0
2
112
88
66
pentru modelul dinamic D şi
874,2
2472,8
667,602,02
2472,8
667,61
1222
22
2228
0
2
112
88
pentru modelul dinamic A. Eroarea relativă a factorului de amplificare dinamică este
%06,4100762,2
762,2874,241
2
adică eroarea răspunsului dinamic staţionar se amplifică de cca. 4 ori.
3.2.2.5. Concluzii
În acest paragraf s-a studiat influenţa gradului de rafinare al discretizării în elemente finite a unui sistem dinamic structural P+1, asupra modurilor proprii de vibraţie determinate prin calcul. S-au considerat patru modele dinamice: A – cu 24 noduri efective,
B – cu 94 noduri efective, C – cu 330 noduri efective, D – cu 1018 noduri efective,
modelele B,C şi D obţinându-se prin reducerea la jumătate a dimensiunilor elementelor finite din modelul precedent.
Se desprind următoarele concluzii: configuraţia primelor 6 forme proprii de vibraţie ale sistemului dinamic
spaţial nu este influenţată de gradul de rafinare al discretizării; pentru aceste moduri de vibraţie se repetă tripletul de forme proprii
longitudinal-transversal-torsiune generală; simetria sistemului dinamic spaţial permite verificarea formelor proprii de
vibraţie obţinute prin calcul, nu numai calitativ, dar şi cantitativ;
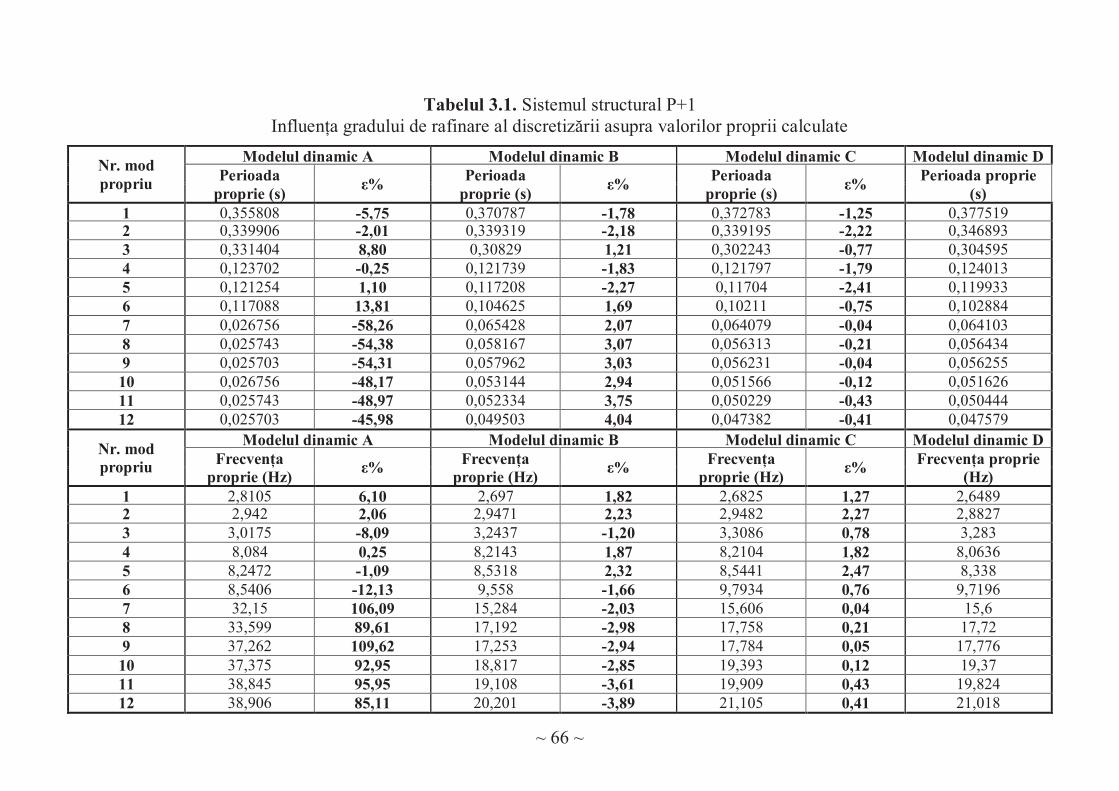
~ 66 ~
Tabelul 3.1. Sistemul structural P+1 Influenţa gradului de rafinare al discretizării asupra valorilor proprii calculate
Nr. mod propriu
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D Perioada
proprie (s) ε% Perioada
proprie (s) ε% Perioada
proprie (s) ε% Perioada proprie
(s) 1 0,355808 -5,75 0,370787 -1,78 0,372783 -1,25 0,377519 2 0,339906 -2,01 0,339319 -2,18 0,339195 -2,22 0,346893 3 0,331404 8,80 0,30829 1,21 0,302243 -0,77 0,304595 4 0,123702 -0,25 0,121739 -1,83 0,121797 -1,79 0,124013 5 0,121254 1,10 0,117208 -2,27 0,11704 -2,41 0,119933 6 0,117088 13,81 0,104625 1,69 0,10211 -0,75 0,102884 7 0,026756 -58,26 0,065428 2,07 0,064079 -0,04 0,064103 8 0,025743 -54,38 0,058167 3,07 0,056313 -0,21 0,056434 9 0,025703 -54,31 0,057962 3,03 0,056231 -0,04 0,056255 10 0,026756 -48,17 0,053144 2,94 0,051566 -0,12 0,051626 11 0,025743 -48,97 0,052334 3,75 0,050229 -0,43 0,050444 12 0,025703 -45,98 0,049503 4,04 0,047382 -0,41 0,047579
Nr. mod propriu
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D Frecvenţa
proprie (Hz) ε% Frecvenţa
proprie (Hz) ε% Frecvenţa
proprie (Hz) ε% Frecvenţa proprie
(Hz) 1 2,8105 6,10 2,697 1,82 2,6825 1,27 2,6489 2 2,942 2,06 2,9471 2,23 2,9482 2,27 2,8827 3 3,0175 -8,09 3,2437 -1,20 3,3086 0,78 3,283 4 8,084 0,25 8,2143 1,87 8,2104 1,82 8,0636 5 8,2472 -1,09 8,5318 2,32 8,5441 2,47 8,338 6 8,5406 -12,13 9,558 -1,66 9,7934 0,76 9,7196 7 32,15 106,09 15,284 -2,03 15,606 0,04 15,6 8 33,599 89,61 17,192 -2,98 17,758 0,21 17,72 9 37,262 109,62 17,253 -2,94 17,784 0,05 17,776 10 37,375 92,95 18,817 -2,85 19,393 0,12 19,37 11 38,845 95,95 19,108 -3,61 19,909 0,43 19,824 12 38,906 85,11 20,201 -3,89 21,105 0,41 21,018
~ 67 ~
Fig. 3.14. Sistemul structural P+1 Variaţia perioadelor proprii de vibraţie
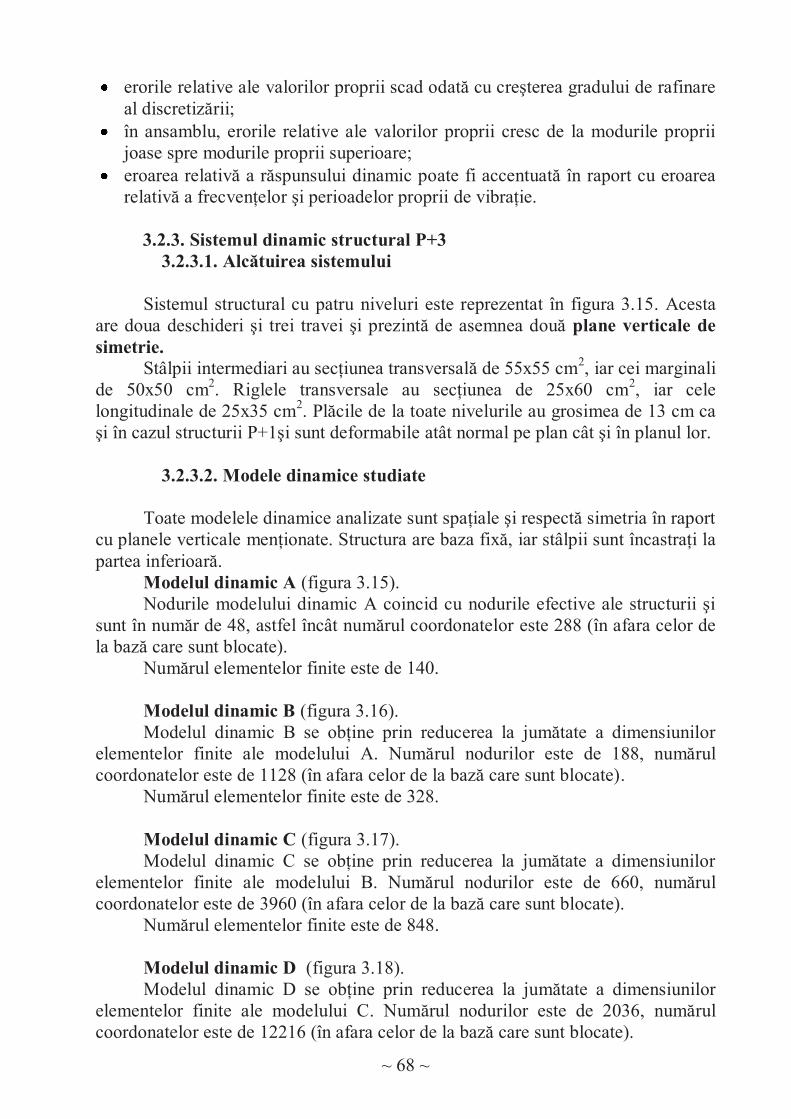
~ 68 ~
erorile relative ale valorilor proprii scad odată cu creşterea gradului de rafinare al discretizării;
în ansamblu, erorile relative ale valorilor proprii cresc de la modurile proprii joase spre modurile proprii superioare;
eroarea relativă a răspunsului dinamic poate fi accentuată în raport cu eroarea relativă a frecvenţelor şi perioadelor proprii de vibraţie.
3.2.3. Sistemul dinamic structural P+3
3.2.3.1. Alcătuirea sistemului
Sistemul structural cu patru niveluri este reprezentat în figura 3.15. Acesta are doua deschideri şi trei travei şi prezintă de asemnea două plane verticale de simetrie.
Stâlpii intermediari au secţiunea transversală de 55x55 cm2, iar cei marginali de 50x50 cm2. Riglele transversale au secţiunea de 25x60 cm2, iar cele longitudinale de 25x35 cm2. Plăcile de la toate nivelurile au grosimea de 13 cm ca şi în cazul structurii P+1şi sunt deformabile atât normal pe plan cât şi în planul lor.
3.2.3.2. Modele dinamice studiate
Toate modelele dinamice analizate sunt spaţiale şi respectă simetria în raport cu planele verticale menţionate. Structura are baza fixă, iar stâlpii sunt încastraţi la partea inferioară.
Modelul dinamic A (figura 3.15). Nodurile modelului dinamic A coincid cu nodurile efective ale structurii şi
sunt în număr de 48, astfel încât numărul coordonatelor este 288 (în afara celor de la bază care sunt blocate). Numărul elementelor finite este de 140. Modelul dinamic B (figura 3.16).
Modelul dinamic B se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale modelului A. Numărul nodurilor este de 188, numărul coordonatelor este de 1128 (în afara celor de la bază care sunt blocate). Numărul elementelor finite este de 328. Modelul dinamic C (figura 3.17). Modelul dinamic C se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale modelului B. Numărul nodurilor este de 660, numărul coordonatelor este de 3960 (în afara celor de la bază care sunt blocate). Numărul elementelor finite este de 848. Modelul dinamic D (figura 3.18).
Modelul dinamic D se obţine prin reducerea la jumătate a dimensiunilor elementelor finite ale modelului C. Numărul nodurilor este de 2036, numărul coordonatelor este de 12216 (în afara celor de la bază care sunt blocate).
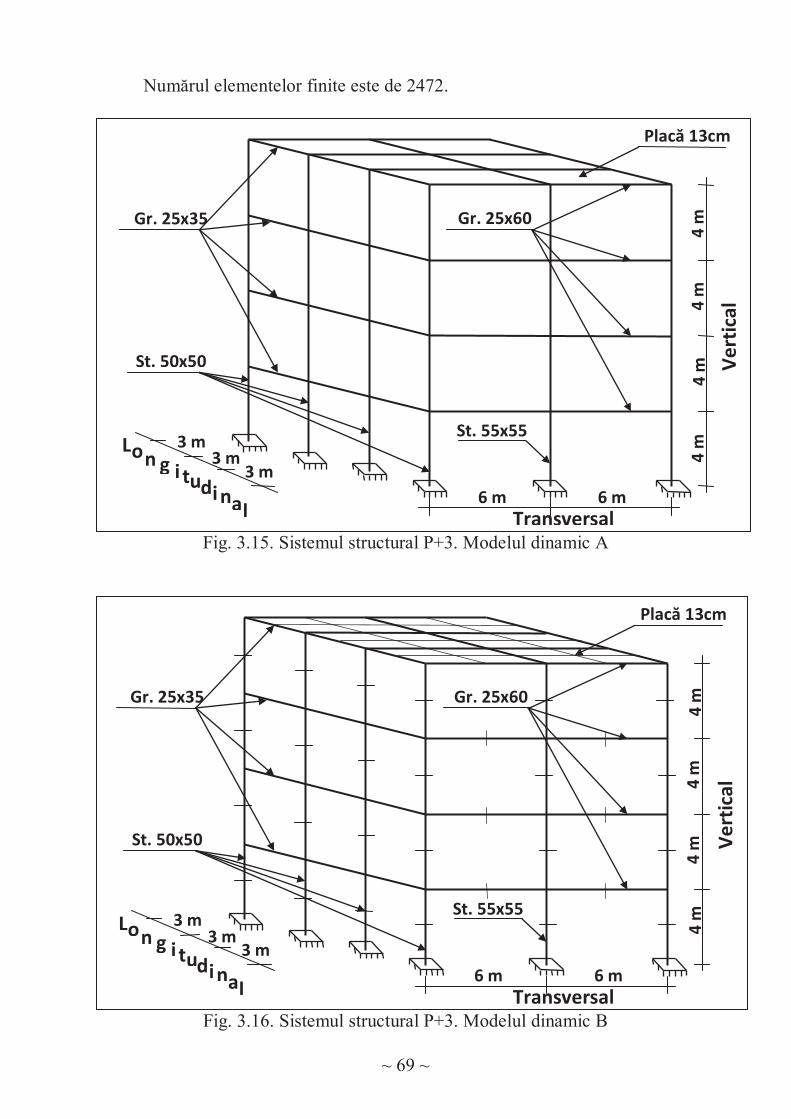
~ 69 ~
Numărul elementelor finite este de 2472.
Fig. 3.15. Sistemul structural P+3. Modelul dinamic A
Fig. 3.16. Sistemul structural P+3. Modelul dinamic B
Ve
rtic
al
Gr. 25x35 Gr. 25x60
St. 50x50
St. 55x55
Placă 13cm
6 m 6 m
4 m
4
m
4 m
4
m
3 m 3 m
3 m
Transversal
L o n g i t u d i n a l
Gr. 25x35 Gr. 25x60
St. 50x50
St. 55x55
Placă 13cm
6 m 6 m
4 m
4
m
4 m
4
m
3 m 3 m
3 m
Transversal
Ve
rtic
al
L o n g i t u d i n a l
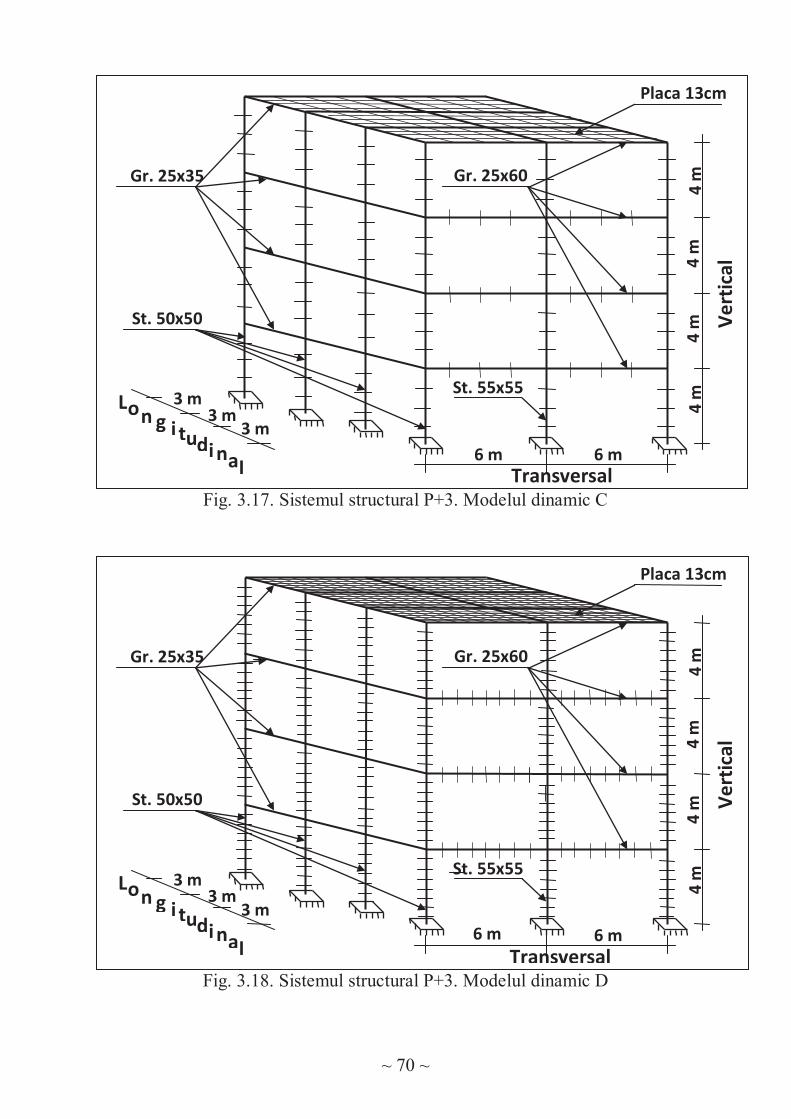
~ 70 ~
Fig. 3.17. Sistemul structural P+3. Modelul dinamic C
Fig. 3.18. Sistemul structural P+3. Modelul dinamic D
Gr. 25x35 Gr. 25x60
St. 50x50
St. 55x55
Placa 13cm
6 m 6 m
4 m
4
m
4 m
4
m
3 m 3 m
3 m
Transversal
Ve
rtic
al
L o n g i t u d i n a l
Ve
rtic
al
Gr. 25x35 Gr. 25x60
St. 50x50
St. 55x55
Placa 13cm
6 m 6 m
4 m
4
m
4 m
4
m
3 m 3 m
3 m
Transversal
L o n g i t u d i n a l
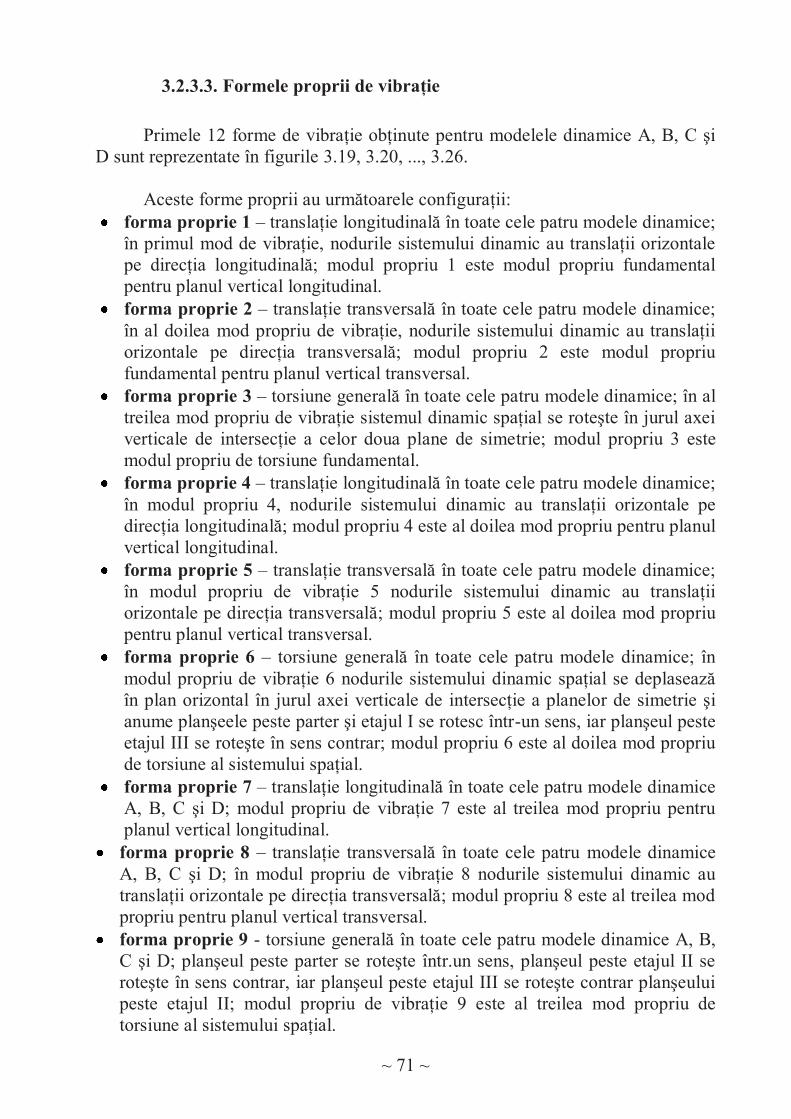
~ 71 ~
3.2.3.3. Formele proprii de vibraţie
Primele 12 forme de vibraţie obţinute pentru modelele dinamice A, B, C şi D sunt reprezentate în figurile 3.19, 3.20, ..., 3.26.
Aceste forme proprii au următoarele configuraţii:
forma proprie 1 – translaţie longitudinală în toate cele patru modele dinamice; în primul mod de vibraţie, nodurile sistemului dinamic au translaţii orizontale pe direcţia longitudinală; modul propriu 1 este modul propriu fundamental pentru planul vertical longitudinal.
forma proprie 2 – translaţie transversală în toate cele patru modele dinamice; în al doilea mod propriu de vibraţie, nodurile sistemului dinamic au translaţii orizontale pe direcţia transversală; modul propriu 2 este modul propriu fundamental pentru planul vertical transversal.
forma proprie 3 – torsiune generală în toate cele patru modele dinamice; în al treilea mod propriu de vibraţie sistemul dinamic spaţial se roteşte în jurul axei verticale de intersecţie a celor doua plane de simetrie; modul propriu 3 este modul propriu de torsiune fundamental.
forma proprie 4 – translaţie longitudinală în toate cele patru modele dinamice; în modul propriu 4, nodurile sistemului dinamic au translaţii orizontale pe direcţia longitudinală; modul propriu 4 este al doilea mod propriu pentru planul vertical longitudinal.
forma proprie 5 – translaţie transversală în toate cele patru modele dinamice; în modul propriu de vibraţie 5 nodurile sistemului dinamic au translaţii orizontale pe direcţia transversală; modul propriu 5 este al doilea mod propriu pentru planul vertical transversal.
forma proprie 6 – torsiune generală în toate cele patru modele dinamice; în modul propriu de vibraţie 6 nodurile sistemului dinamic spaţial se deplasează în plan orizontal în jurul axei verticale de intersecţie a planelor de simetrie şi anume planşeele peste parter şi etajul I se rotesc într-un sens, iar planşeul peste etajul III se roteşte în sens contrar; modul propriu 6 este al doilea mod propriu de torsiune al sistemului spaţial.
forma proprie 7 – translaţie longitudinală în toate cele patru modele dinamice A, B, C şi D; modul propriu de vibraţie 7 este al treilea mod propriu pentru planul vertical longitudinal.
forma proprie 8 – translaţie transversală în toate cele patru modele dinamice A, B, C şi D; în modul propriu de vibraţie 8 nodurile sistemului dinamic au translaţii orizontale pe direcţia transversală; modul propriu 8 este al treilea mod propriu pentru planul vertical transversal.
forma proprie 9 - torsiune generală în toate cele patru modele dinamice A, B, C şi D; planşeul peste parter se roteşte într.un sens, planşeul peste etajul II se roteşte în sens contrar, iar planşeul peste etajul III se roteşte contrar planşeului peste etajul II; modul propriu de vibraţie 9 este al treilea mod propriu de torsiune al sistemului spaţial.
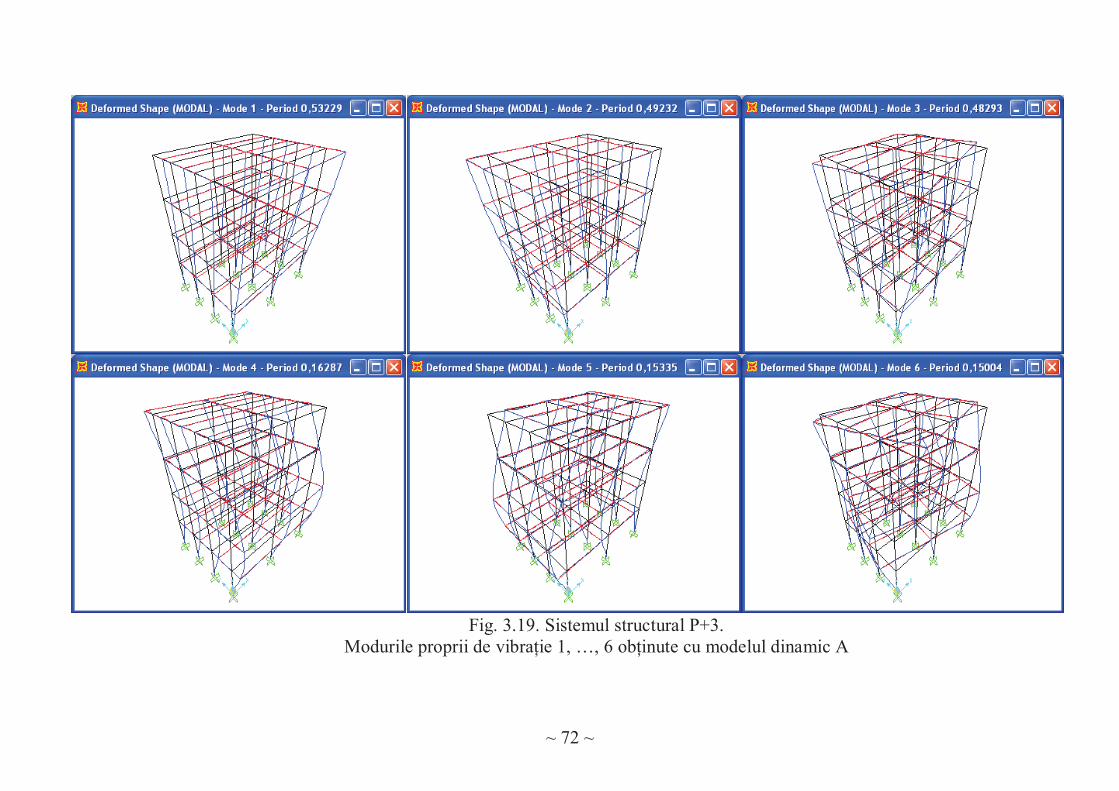
~ 72 ~
Fig. 3.19. Sistemul structural P+3.
Modurile proprii de vibraţie 1, …, 6 obţinute cu modelul dinamic A
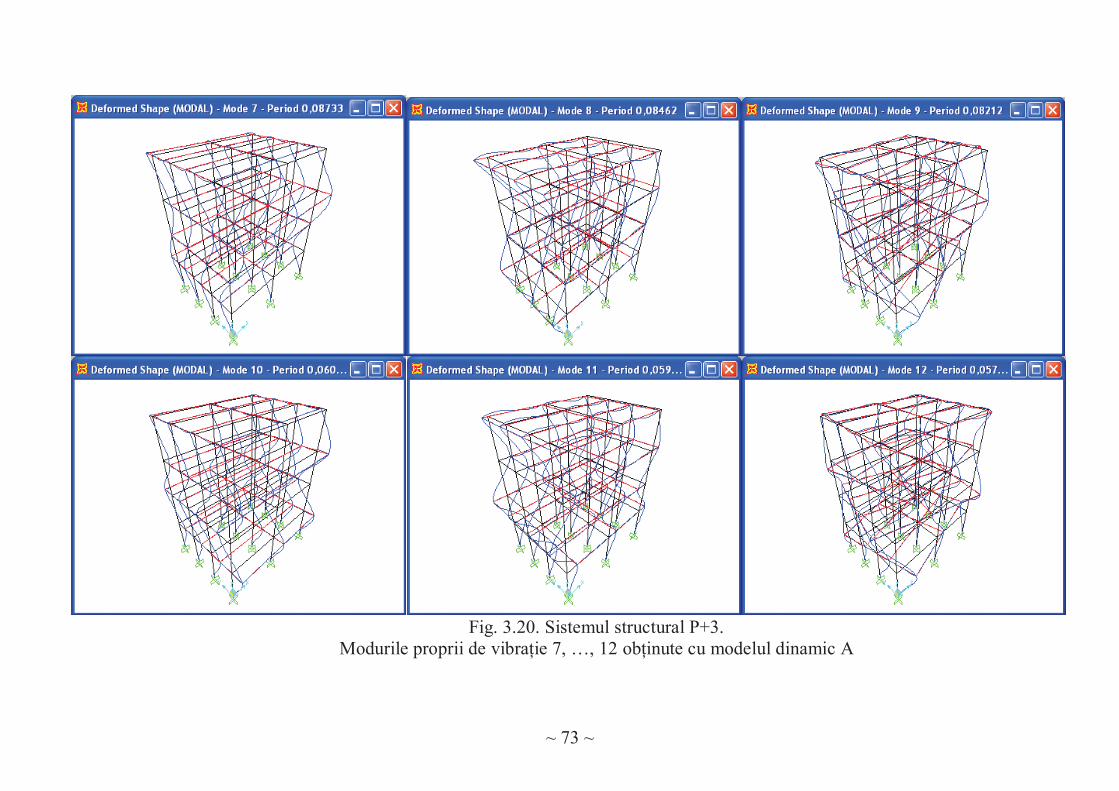
~ 73 ~
Fig. 3.20. Sistemul structural P+3.
Modurile proprii de vibraţie 7, …, 12 obţinute cu modelul dinamic A
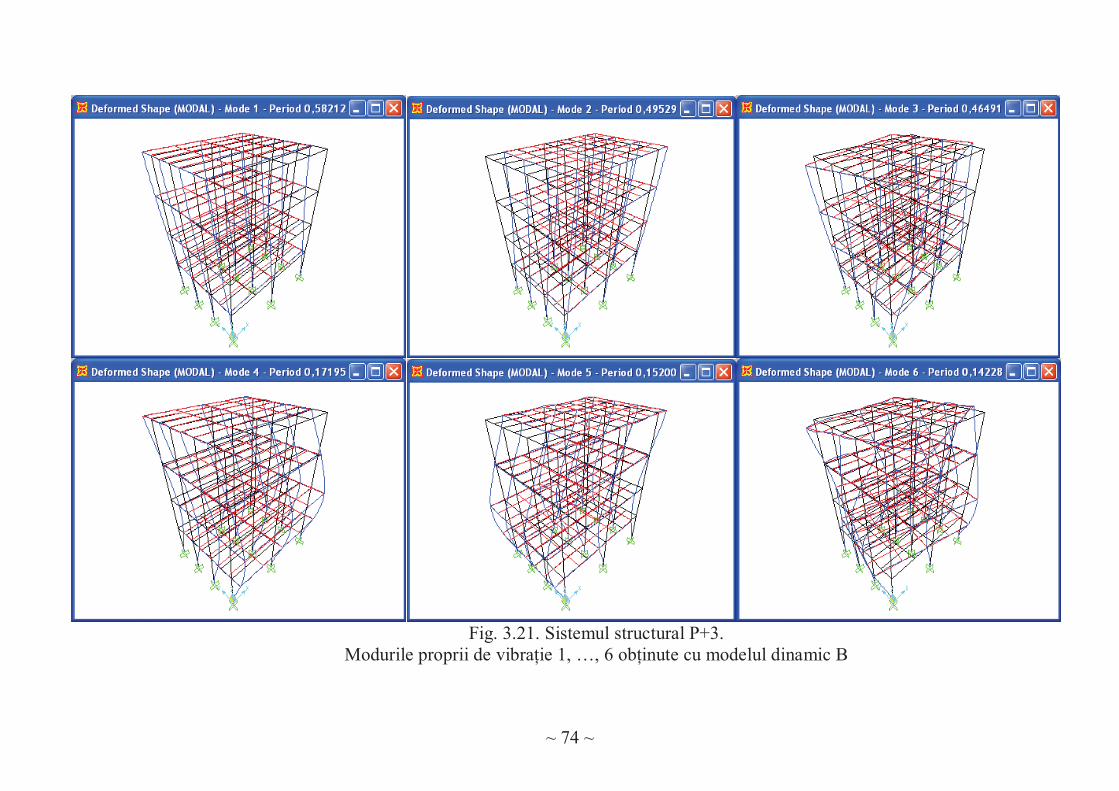
~ 74 ~
Fig. 3.21. Sistemul structural P+3.
Modurile proprii de vibraţie 1, …, 6 obţinute cu modelul dinamic B
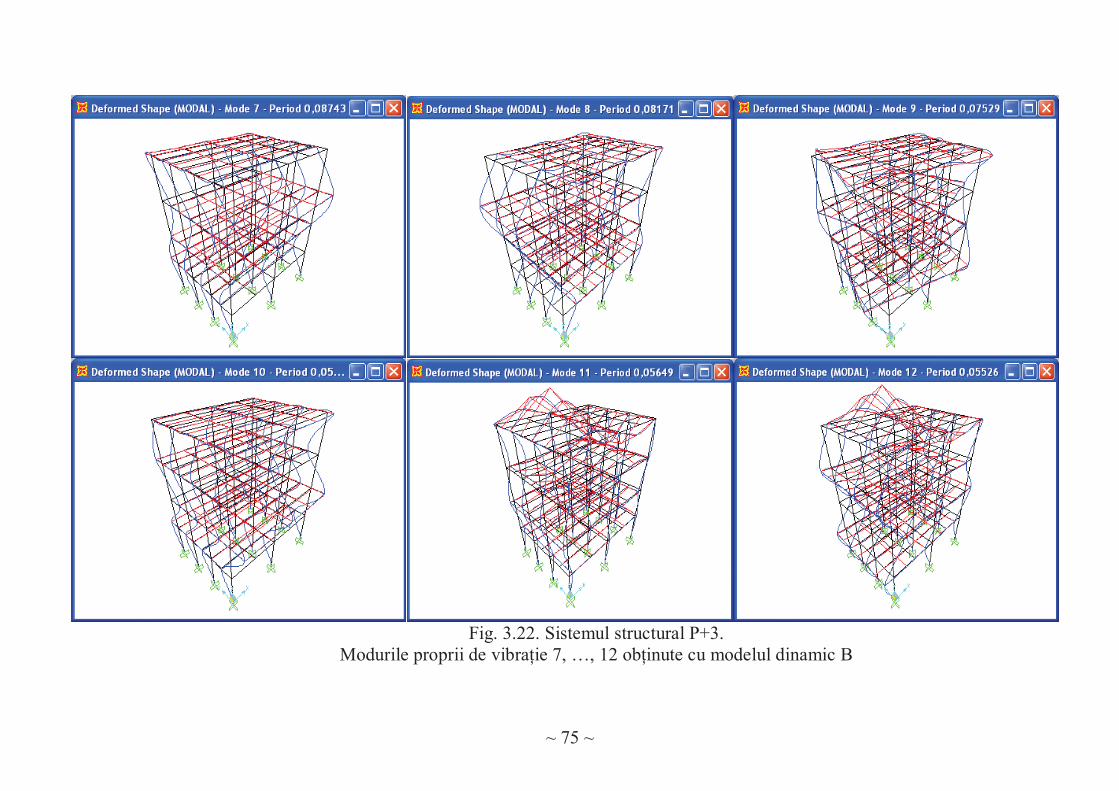
~ 75 ~
Fig. 3.22. Sistemul structural P+3.
Modurile proprii de vibraţie 7, …, 12 obţinute cu modelul dinamic B
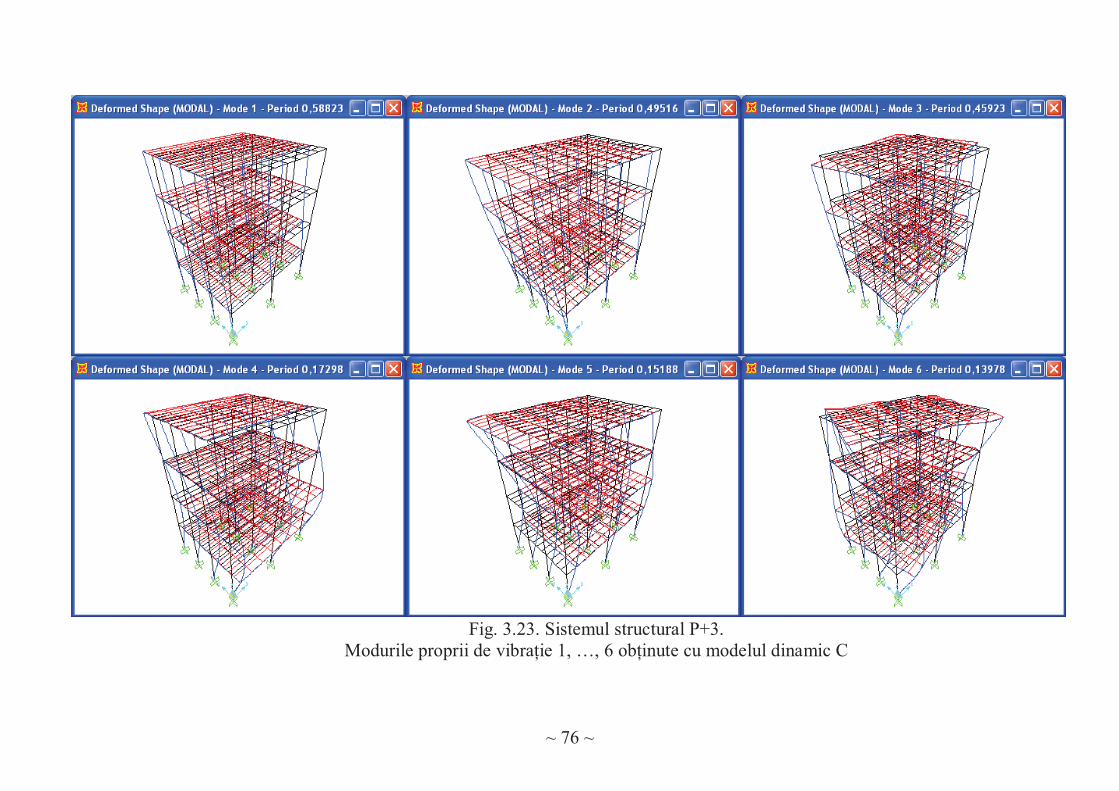
~ 76 ~
Fig. 3.23. Sistemul structural P+3.
Modurile proprii de vibraţie 1, …, 6 obţinute cu modelul dinamic C
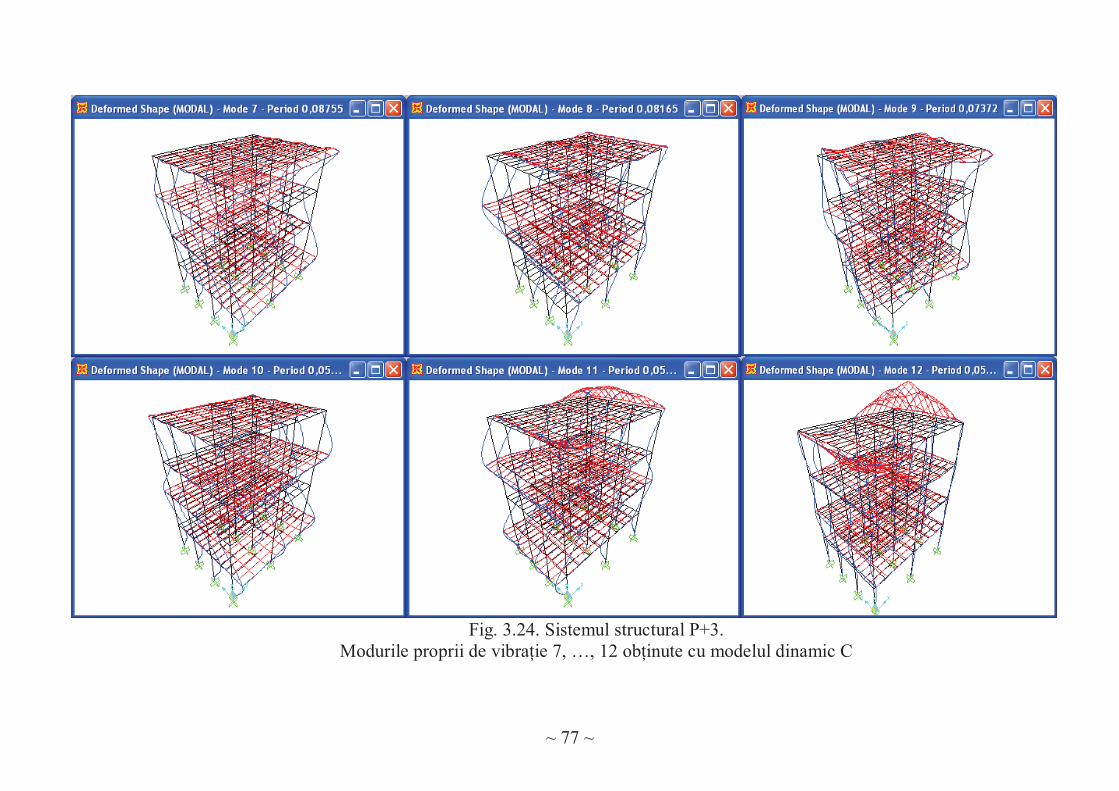
~ 77 ~
Fig. 3.24. Sistemul structural P+3.
Modurile proprii de vibraţie 7, …, 12 obţinute cu modelul dinamic C
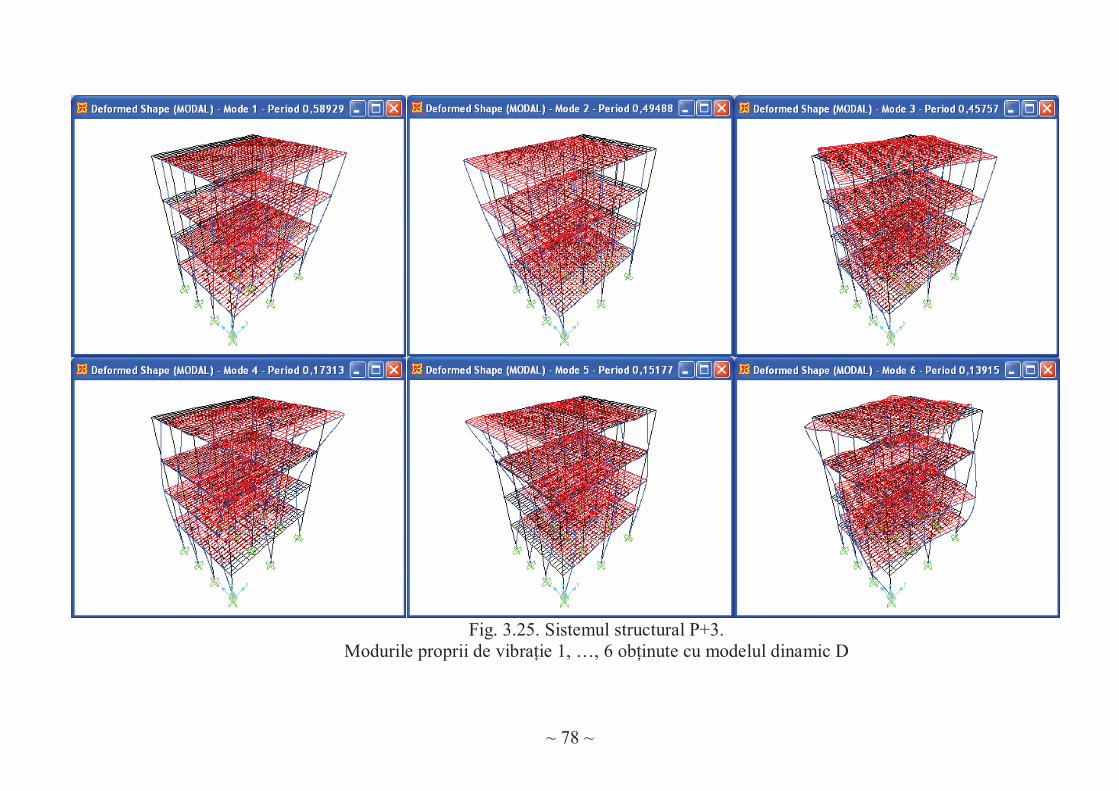
~ 78 ~
Fig. 3.25. Sistemul structural P+3.
Modurile proprii de vibraţie 1, …, 6 obţinute cu modelul dinamic D
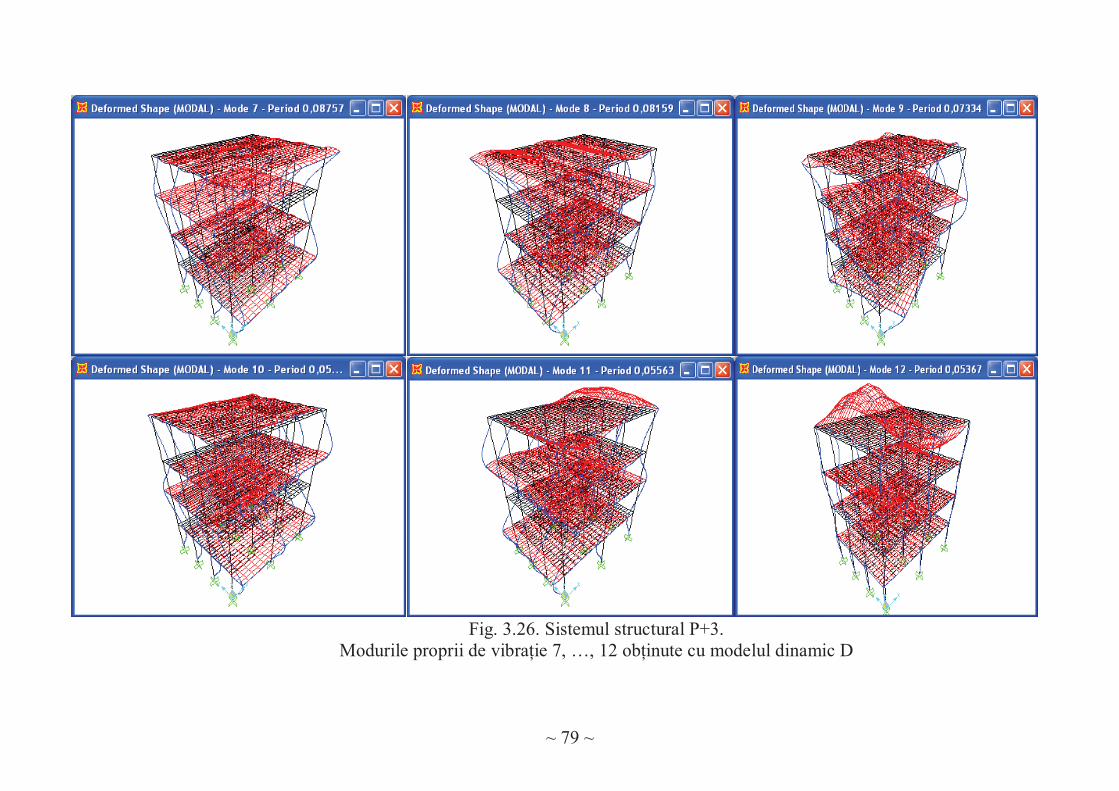
~ 79 ~
Fig. 3.26. Sistemul structural P+3.
Modurile proprii de vibraţie 7, …, 12 obţinute cu modelul dinamic D
~ 80 ~
forma proprie 10 – translaţie longitudinală în toate cele patru modele dinamice A, B, C şi D; modul propriu de vibraţie este al patrulea mod propriu pentru planul vertical longitudinal; planşeele peste parter şi etajul II au translaţii longitudinale într-un sens, iar planşeele peste etajele I şi III au translaţii longitudinale în sens contrar.
forma proprie 11 – este diferenţiată în funcţie de modelul dinamic (figurile 3.20, 3.22, 3.24 şi 3.26); modelul A pune clar în evidenţă a patra formă proprie de vibraţie în planul vertical transversal, şi anume planşeele peste parter şi etajul II au translaţii transversale într-un sens, iar planşeele peste etajele I şi III în sens contrar; în modelele B, C şi D aceste translaţii transversale sunt insoţite de deplasări verticale ale nodurilor plăcilor.
forma proprie 12 – este de asemenea diferenţiată în funcţie de modelul dinamic (figurile 3.20, 3.22, 3.24 şi 3.2.26); modelul A pune în evidenţă a patra formă proprie de torsiune a sistemului dinamic spaţial; planşeele peste parter şi etajul II se rotesc într-un sens, iar cele peste etajele I şi III în sens contrar; în modelele B,C şi D această formă de torsiune generală este insoţită de deplasările nodurilor interioare ale plăcilor.
Se poate şi aici concluziona că tripletul longitudinal-transversal-torsiune
se repetă din trei în trei moduri proprii de vibraţie. În cazul sistemului structural P+3 acest fapt este valabil pentru primele 9 moduri proprii. Acest rezultat s-a obţinut de asemenea printr-o „predimensionare dinamică” a sistemului structural spaţial.
În ceea ce priveşte formele proprii de vibraţie 10, 11 şi 12, configuraţia acestora se diferenţiază în funcţie de modelul dinamic adoptat, şi anume modelul A are nodurile exclusiv în nodurile efective ale structurii, astfel încât nu poate pune în evidenţă deplasările nodurilor interioare ale plăcilor, ceea ce realizează modelele B, C şi D.
Simetria sistemului dinamic spaţial permite verificarea formelor proprii de vibraţie obţinute prin calcul, atât din punct de vedere calitativ, cât şi cantitativ.
3.2.3.4. Influenţa gradului de rafinare al discretizării asupra valorilor proprii calculate
Valorile proprii determinate prin calcul pentru modelele dinamice A, B, C şi
D sunt comparate în tabelele 3.2 şi 3.3. S-au considerat primele 24 de valori proprii şi anume perioadele proprii de vibraţie şi frecvenţele proprii de vibraţie.
S-au determinat erorile acestor valori proprii în raport cu modelul dinamic D, care are cel mai mare grad de rafinare al discretizării în elemente finite.
Se constată următoarele: erorile relative scad odată cu creşterea gradului de rafinare al discretizării;
astfel, perioada proprie fundamentală are eroarea relativă de 9,67% la modelul A, 1,22% la modelul B şi 0,18% la modelul dinamic C; erorile perioadelor proprii se încadrează în intervalul [0;29,3%] la modelul A, [0;9,48%] la modelul B şi [0;0,87%] la modelul C; erorile frecvenţelor proprii se încadrează
~ 81 ~
în intervalul [0;41,43%] la modelul A, [0;8,66%] la modelul B şi [0;0,86%] la modelul C.
în ansamblu, erorile relative ale valorilor proprii cresc de la modurile proprii joase spre modurile proprii superioare
Variaţia perioadelor proprii de vibraţie este reprezentată în figura 3.27.
3.2.3.5. Concluzii
În acest paragraf s-a studiat influenţa gradului de rafinare al discretizării în elemente finite a unui sistem dinamic structural P+3, asupra modurilor proprii de vibraţie determinate prin calcul.
S-au considerat patru modele dinamice: A – cu 48 noduri efective, B – cu 184 noduri efective, C – cu 660 noduri efective, D – cu 2036 noduri efective,
modelele B,C şi D obţinându-se prin reducerea la jumătate a dimensiunilor elementelor finite din modelul precedent. Se desprind următoarele concluzii: configuraţia primelor 10 forme proprii de vibraţie nu este influenţată de gradul
de rafinare al discretizării; pentru aceste moduri de vibraţie se repetă tripletul de forme proprii
longitudinal-transversal-torsiune generală; simetria sistemului dinamic spaţial permite verificare calitativă şi cantitativă a
formelor proprii de vibraţie determinate prin calcul; erorile relative ale valorilor proprii scad odată cu creşterea gradului de rafinare
al discretizării în elemente finite; în ansamblu, erorile relative ale valorilor proprii cresc de la modurile proprii
joase spre modurile proprii superioare.
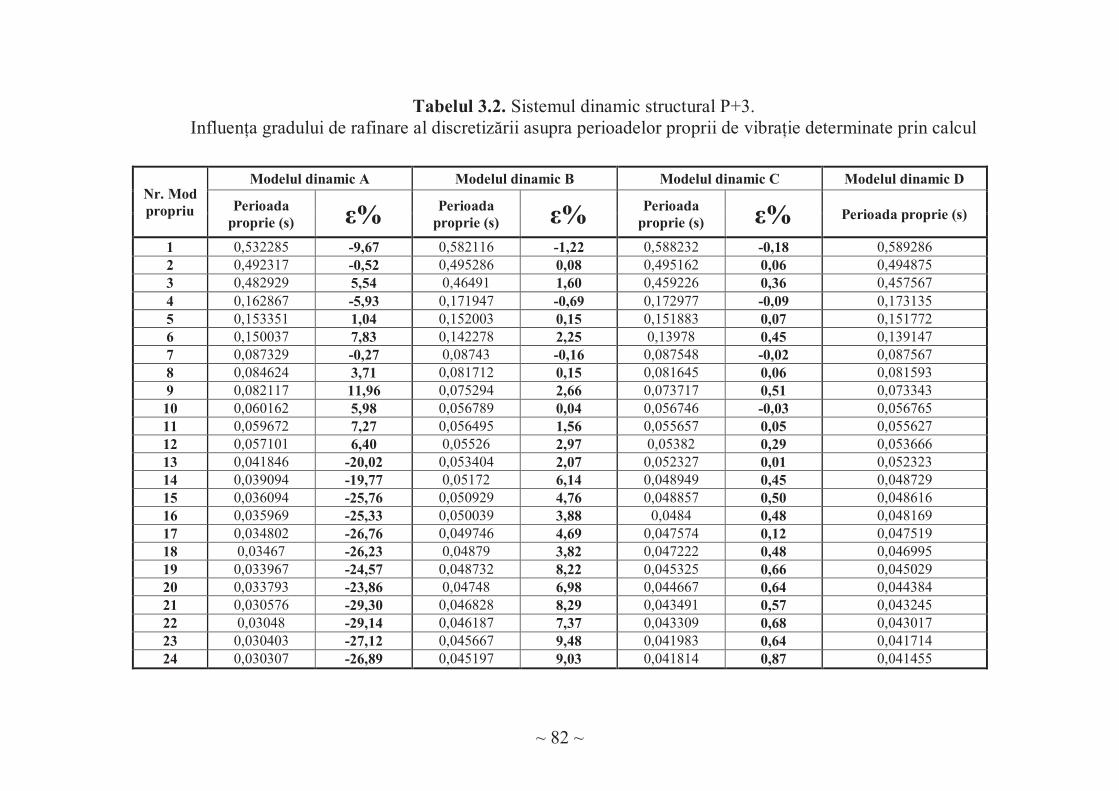
~ 82 ~
Tabelul 3.2. Sistemul dinamic structural P+3. Influenţa gradului de rafinare al discretizării asupra perioadelor proprii de vibraţie determinate prin calcul
Nr. Mod propriu
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D
Perioada
proprie (s) ε% Perioada proprie (s) ε% Perioada
proprie (s) ε% Perioada proprie (s)
1 0,532285 -9,67 0,582116 -1,22 0,588232 -0,18 0,589286
2 0,492317 -0,52 0,495286 0,08 0,495162 0,06 0,494875
3 0,482929 5,54 0,46491 1,60 0,459226 0,36 0,457567
4 0,162867 -5,93 0,171947 -0,69 0,172977 -0,09 0,173135
5 0,153351 1,04 0,152003 0,15 0,151883 0,07 0,151772 6 0,150037 7,83 0,142278 2,25 0,13978 0,45 0,139147
7 0,087329 -0,27 0,08743 -0,16 0,087548 -0,02 0,087567
8 0,084624 3,71 0,081712 0,15 0,081645 0,06 0,081593
9 0,082117 11,96 0,075294 2,66 0,073717 0,51 0,073343
10 0,060162 5,98 0,056789 0,04 0,056746 -0,03 0,056765
11 0,059672 7,27 0,056495 1,56 0,055657 0,05 0,055627
12 0,057101 6,40 0,05526 2,97 0,05382 0,29 0,053666
13 0,041846 -20,02 0,053404 2,07 0,052327 0,01 0,052323
14 0,039094 -19,77 0,05172 6,14 0,048949 0,45 0,048729 15 0,036094 -25,76 0,050929 4,76 0,048857 0,50 0,048616
16 0,035969 -25,33 0,050039 3,88 0,0484 0,48 0,048169
17 0,034802 -26,76 0,049746 4,69 0,047574 0,12 0,047519
18 0,03467 -26,23 0,04879 3,82 0,047222 0,48 0,046995
19 0,033967 -24,57 0,048732 8,22 0,045325 0,66 0,045029
20 0,033793 -23,86 0,04748 6,98 0,044667 0,64 0,044384
21 0,030576 -29,30 0,046828 8,29 0,043491 0,57 0,043245
22 0,03048 -29,14 0,046187 7,37 0,043309 0,68 0,043017
23 0,030403 -27,12 0,045667 9,48 0,041983 0,64 0,041714
24 0,030307 -26,89 0,045197 9,03 0,041814 0,87 0,041455
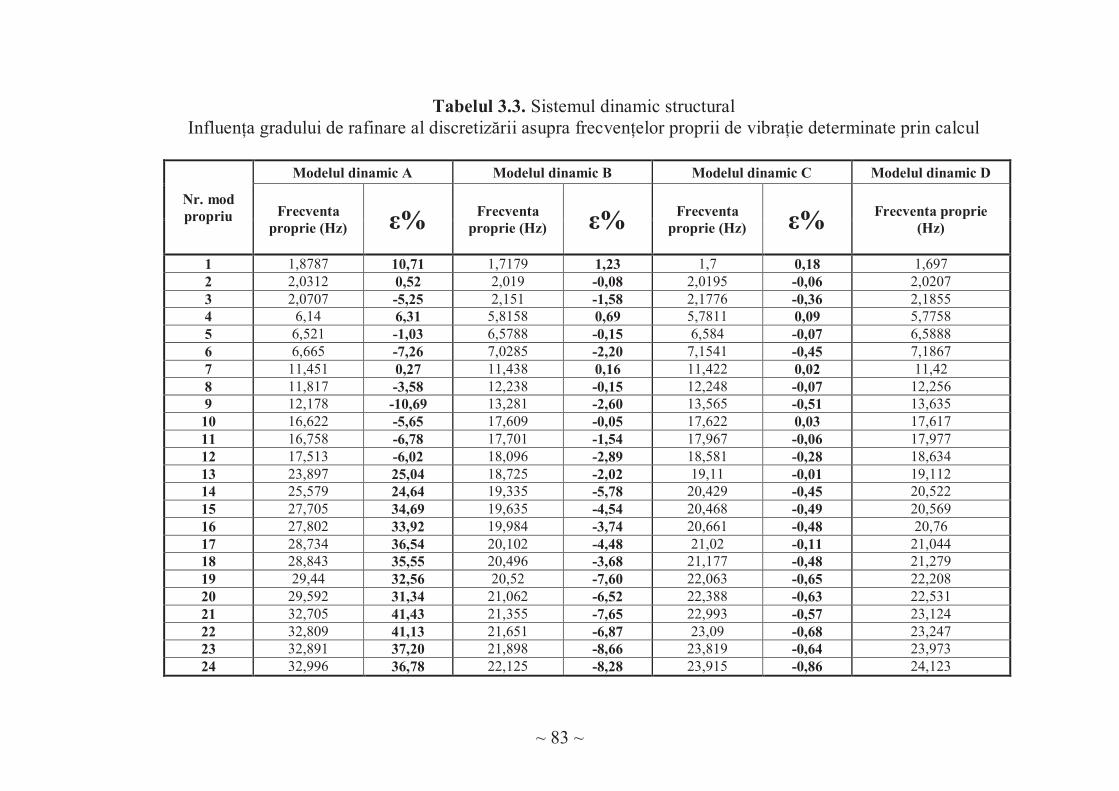
~ 83 ~
Tabelul 3.3. Sistemul dinamic structural Influenţa gradului de rafinare al discretizării asupra frecvenţelor proprii de vibraţie determinate prin calcul
Nr. mod propriu
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D
Frecventa proprie (Hz) ε% Frecventa
proprie (Hz) ε% Frecventa proprie (Hz) ε% Frecventa proprie
(Hz)
1 1,8787 10,71 1,7179 1,23 1,7 0,18 1,697 2 2,0312 0,52 2,019 -0,08 2,0195 -0,06 2,0207 3 2,0707 -5,25 2,151 -1,58 2,1776 -0,36 2,1855 4 6,14 6,31 5,8158 0,69 5,7811 0,09 5,7758 5 6,521 -1,03 6,5788 -0,15 6,584 -0,07 6,5888 6 6,665 -7,26 7,0285 -2,20 7,1541 -0,45 7,1867 7 11,451 0,27 11,438 0,16 11,422 0,02 11,42 8 11,817 -3,58 12,238 -0,15 12,248 -0,07 12,256 9 12,178 -10,69 13,281 -2,60 13,565 -0,51 13,635 10 16,622 -5,65 17,609 -0,05 17,622 0,03 17,617 11 16,758 -6,78 17,701 -1,54 17,967 -0,06 17,977 12 17,513 -6,02 18,096 -2,89 18,581 -0,28 18,634 13 23,897 25,04 18,725 -2,02 19,11 -0,01 19,112 14 25,579 24,64 19,335 -5,78 20,429 -0,45 20,522 15 27,705 34,69 19,635 -4,54 20,468 -0,49 20,569 16 27,802 33,92 19,984 -3,74 20,661 -0,48 20,76 17 28,734 36,54 20,102 -4,48 21,02 -0,11 21,044 18 28,843 35,55 20,496 -3,68 21,177 -0,48 21,279 19 29,44 32,56 20,52 -7,60 22,063 -0,65 22,208 20 29,592 31,34 21,062 -6,52 22,388 -0,63 22,531 21 32,705 41,43 21,355 -7,65 22,993 -0,57 23,124 22 32,809 41,13 21,651 -6,87 23,09 -0,68 23,247 23 32,891 37,20 21,898 -8,66 23,819 -0,64 23,973 24 32,996 36,78 22,125 -8,28 23,915 -0,86 24,123
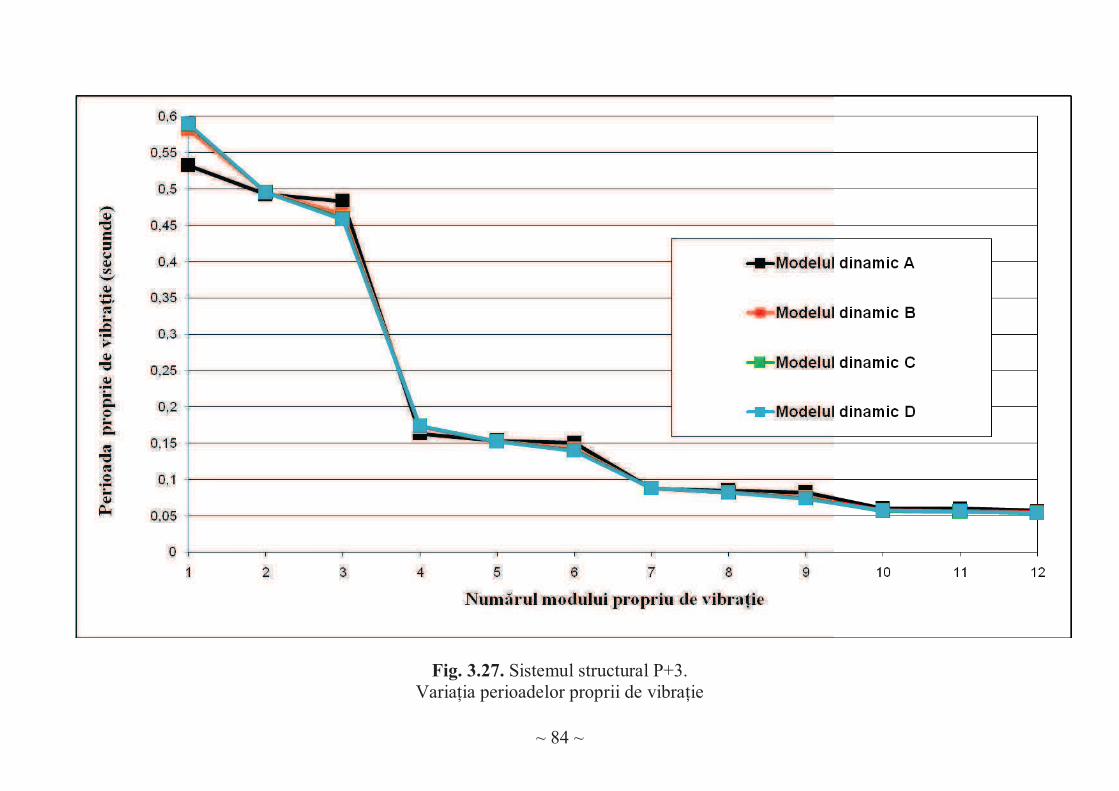
~ 84 ~
Fig. 3.27. Sistemul structural P+3. Variaţia perioadelor proprii de vibraţie
~ 85 ~
3.3. INFLUENŢA GRADULUI DE RAFINARE AL DISCRETIZĂRII ASUPRA RĂSPUNSULUI DINAMIC
3.3.1. Introducere
Răspunsul dinamic al sistemelor structurale poate fi determinat prin analiză modală sau prin integrarea directă a sistemului ecuaţiilor diferenţiale.
În analiza modală a răspunsului dinamic sistemul ecuaţiilor diferenţiale se decuplează în ecuaţii independente, corespunzătoare câte unui mod propriu de vibraţie. Fiecare ecuaţie diferenţială se rezolvă fie analitic – dacă pentru acţiunea dinamică există o exprimare analitică a răspunsului – fie prin integrare numerică.
Integrarea directă a sistemului ecuaţiilor diferenţiale se efectuează fără a transforma acest sistem într-o altă formă şi constă în aplicarea unor metode numerice de integrare, denumite metode pas-cu-pas.
Indiferent de metoda de calcul aplicată pentru determinarea răspunsului dinamic, calitatea modelului dinamic adoptat pentru sistemul structural este reprezentată de acurateţea modurilor proprii de vibraţie. Modificările modurilor proprii se regăsesc în modificările răspunsului dinamic, indiferent de acţiunea dinamică ce se exercită asupra sistemului structural şi indiferent dacă se consideră comportarea liniară sau neliniară a structurii.
3.3.2. Influenţa gradului de rafinare al discretizării asupra răspunsului dinamic la acţiunea forţelor armonice
Forţele dinamice armonice provin în special din funcţionarea maşinilor
industriale cu elemente rotative. În paragraful 3.2.2.4 s-a considerat acţiunea unei forţe perturbatoare
armonice pentru o turaţie de 400 rot/min, forţă aplicată pe direcţia transversală a sistemului dinamic structural P+1.
În modul propriu 5 – transversal – frecvenţa proprie de vibraţie este de 8,838 Hz (pentru modelul dinamic de referinţă şi anume modelul D) ceea ce reprezintă o turaţie echivalentă de 500 rot/min. Factorul de amplificare dinamică pentru o fracţiune din amortizarea critică de 2% este 2,762. În modelul dinamic A al aceluiaşi sistem structural, frecvenţa proprie de vibraţie pentru modul propriu 5 – transversal – are o eroare relativă de cca. 1%. Eroarea relativă a factorului de amplificare dinamică este de cca. 4%, adică eroarea răspunsului dinamic staţionar şi permanent se amplifică de cca. 4 ori.
~ 86 ~
3.3.3. Influenţa gradului de rafinare al discretizării asupra răspunsului dinamic la acţiunea seismică
3.3.3.1. Metoda de calcul aplicată
S-a aplicat „metoda de calcul dinamic liniar”. În această metodă acţiunea
seismică este reprezentată prin accelerograme înregistrate în diferite condiţii de amplasament şi/sau prin accelerograme artificiale.
În prezentul referat s-a utilizat accelerograma N-S a cutremurului din 4 martie 1977 înregistrată la INCERC – Bucureşti, durata acţiunii (şi a răspunsului calculat) fiind de 40 s.
Acceleraţia terenului a fost aplicată pe direcţia longitudinală atât sistemului dinamic structural P+1 cât şi sistemului dinamic structural P+3.
3.3.3.2. Rezultate obţinute
Se prezintă trei categorii de rezultate: variaţia în timp a deplasării relative (faţă de poziţia nedeformată a sistemului
structural) a planşeului superior, pe direcţie longitudinală (figura 3.28 şi figura 3.29);
deplasările relative maxime ale fiecărui planşeu pe direcţia longitudinală (tabelul 3.4);
deplasările relative de nivel maxime (tabelul 3.5). Deplasările relative maxime ale celor două sisteme dinamice structurale sunt
prezentate în figurile 3.30 şi 3.31.
3.3.3.3. Concluzii
La ambele sisteme structurale, P+1 şi P+3, pentru perioada proprie fundamentală, T1, determinată cu modelul dinamic de referinţă D, spectrul seismic de răspuns este crescător.
Modelele dinamice mai grosiere şi anume C, B şi A au condus la deplasări calculate mai mici cu până la 27,8%, deoarece perioadele proprii de vibraţie T1 calculate sunt mai mici (cu până la 5,75% la P+1 şi cu până la 9,67% la P+3). Acest fapt este descoperitor nu numai în cazul utilizării modelului dinamic A, dar chiar şi a modelului dinamic mai rafinat, B (deplasări calculate mai mici cu 8,71% la P+1).
Eroarea perioadei proprii de vibraţie se regăseşte amplificată de câteva ori în răspunsul dinamic la acţiunea seismică.
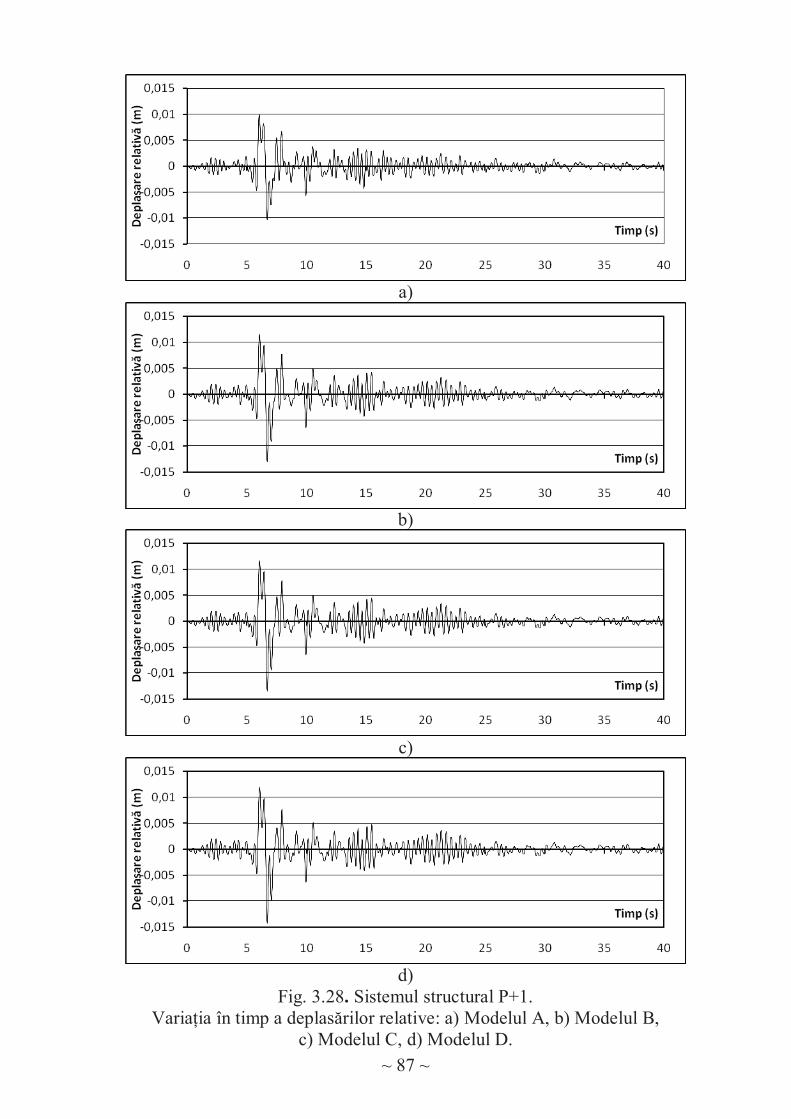
~ 87 ~
a)
b)
c)
d)
Fig. 3.28. Sistemul structural P+1. Variaţia în timp a deplasărilor relative: a) Modelul A, b) Modelul B,
c) Modelul C, d) Modelul D.
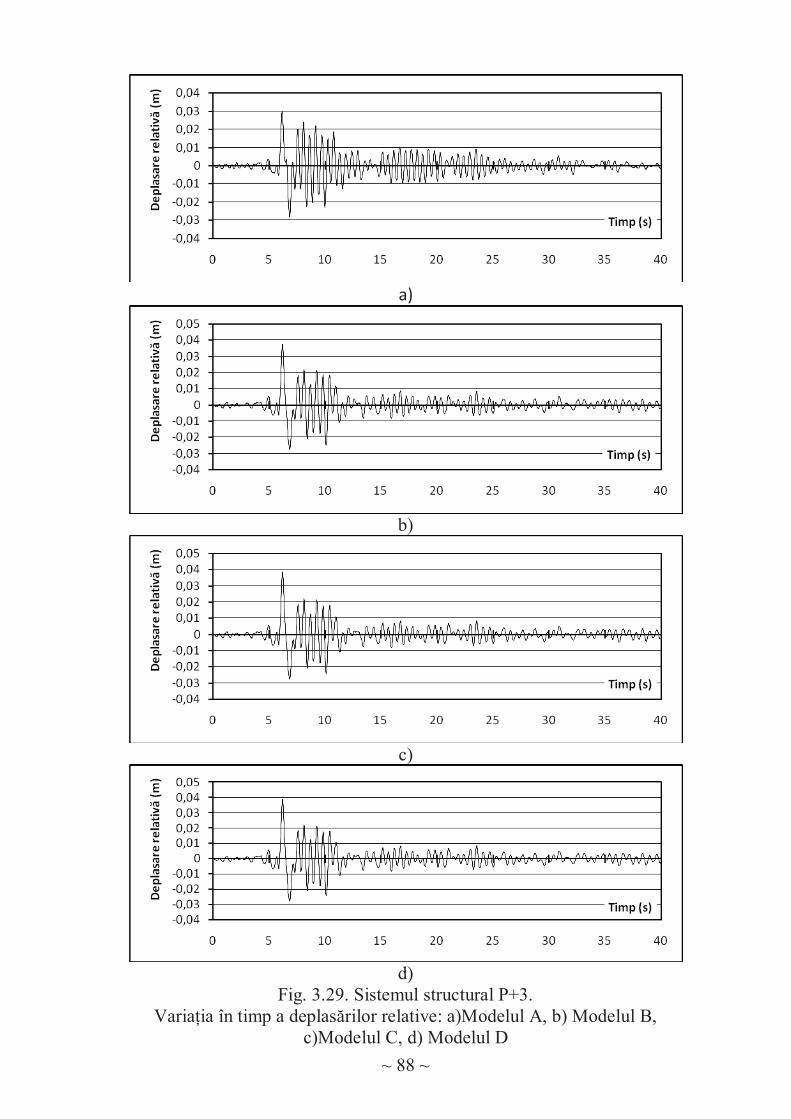
~ 88 ~
a)
b)
c)
d)
Fig. 3.29. Sistemul structural P+3. Variaţia în timp a deplasărilor relative: a)Modelul A, b) Modelul B,
c)Modelul C, d) Modelul D
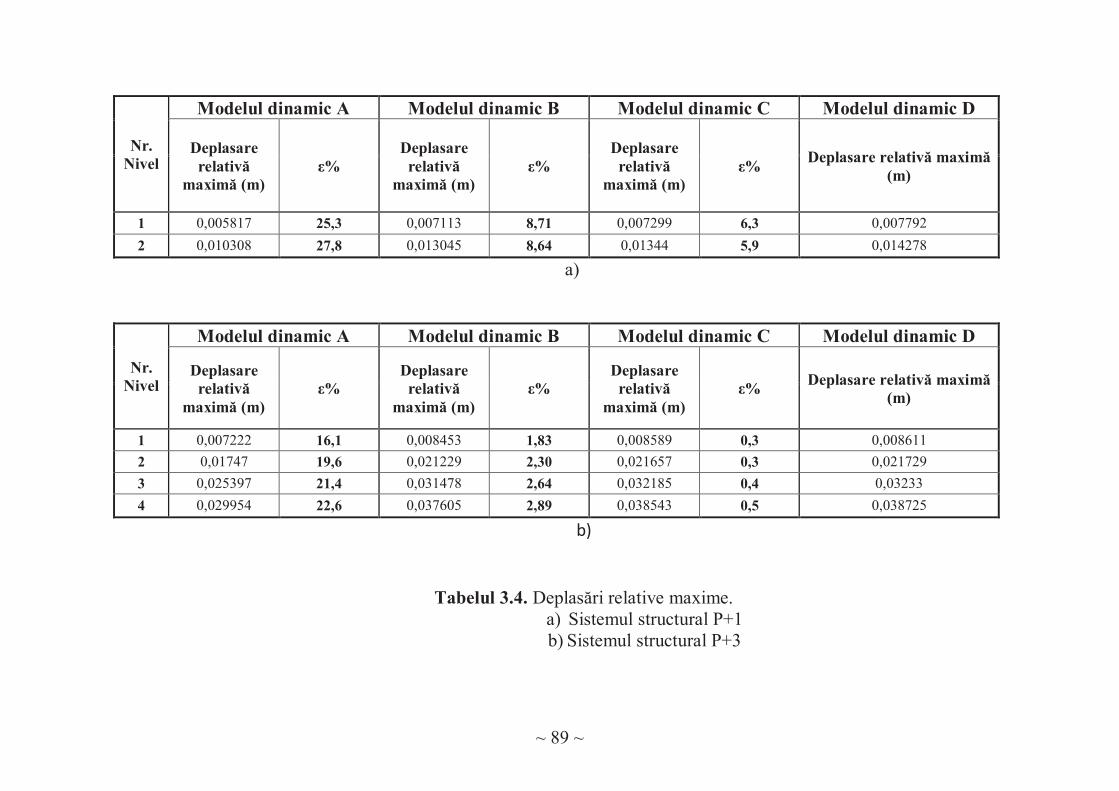
~ 89 ~
Nr. Nivel
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D
Deplasare relativă
maximă (m) ε%
Deplasare relativă
maximă (m) ε%
Deplasare relativă
maximă (m) ε%
Deplasare relativă maximă (m)
1 0,005817 25,3 0,007113 8,71 0,007299 6,3 0,007792
2 0,010308 27,8 0,013045 8,64 0,01344 5,9 0,014278
a)
Nr. Nivel
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D
Deplasare relativă
maximă (m) ε%
Deplasare relativă
maximă (m) ε%
Deplasare relativă
maximă (m) ε% Deplasare relativă maximă
(m)
1 0,007222 16,1 0,008453 1,83 0,008589 0,3 0,008611
2 0,01747 19,6 0,021229 2,30 0,021657 0,3 0,021729
3 0,025397 21,4 0,031478 2,64 0,032185 0,4 0,03233
4 0,029954 22,6 0,037605 2,89 0,038543 0,5 0,038725
b)
Tabelul 3.4. Deplasări relative maxime. a) Sistemul structural P+1 b) Sistemul structural P+3
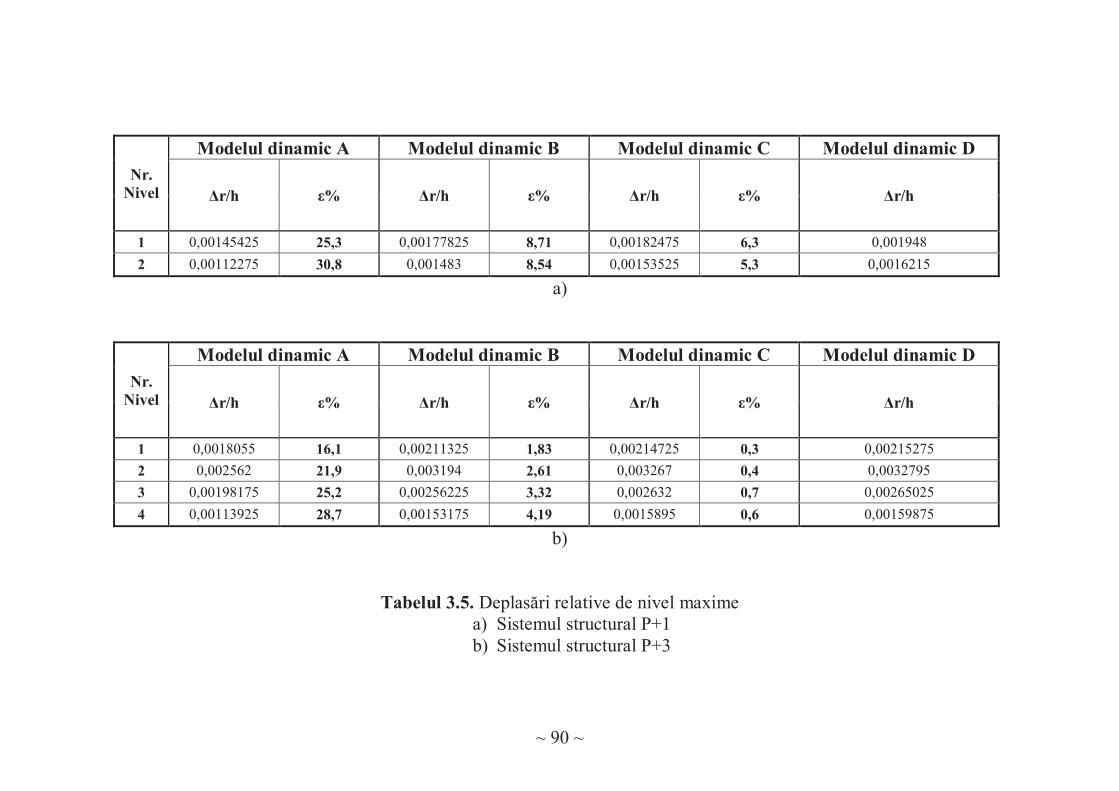
~ 90 ~
Nr. Nivel
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D
Δr/h ε% Δr/h ε% Δr/h ε% Δr/h
1 0,00145425 25,3 0,00177825 8,71 0,00182475 6,3 0,001948
2 0,00112275 30,8 0,001483 8,54 0,00153525 5,3 0,0016215
a)
Nr. Nivel
Modelul dinamic A Modelul dinamic B Modelul dinamic C Modelul dinamic D
Δr/h ε% Δr/h ε% Δr/h ε% Δr/h
1 0,0018055 16,1 0,00211325 1,83 0,00214725 0,3 0,00215275
2 0,002562 21,9 0,003194 2,61 0,003267 0,4 0,0032795
3 0,00198175 25,2 0,00256225 3,32 0,002632 0,7 0,00265025
4 0,00113925 28,7 0,00153175 4,19 0,0015895 0,6 0,00159875
b)
Tabelul 3.5. Deplasări relative de nivel maxime a) Sistemul structural P+1 b) Sistemul structural P+3
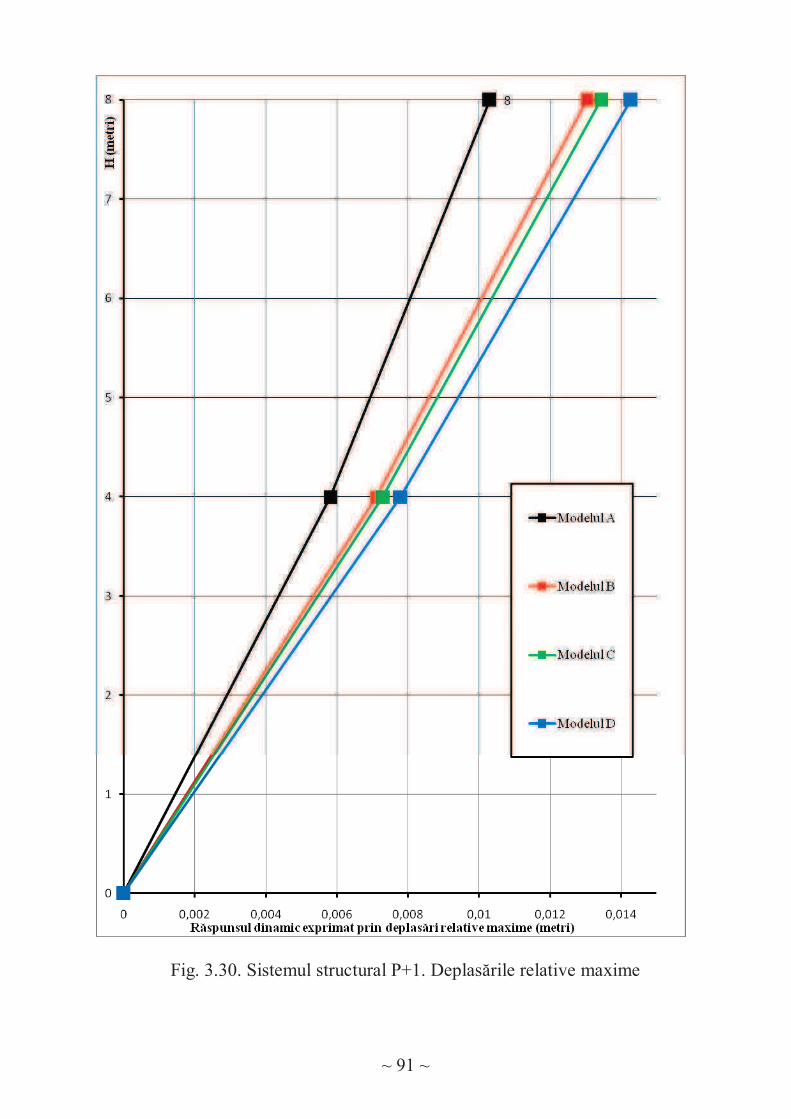
~ 91 ~
Fig. 3.30. Sistemul structural P+1. Deplasările relative maxime
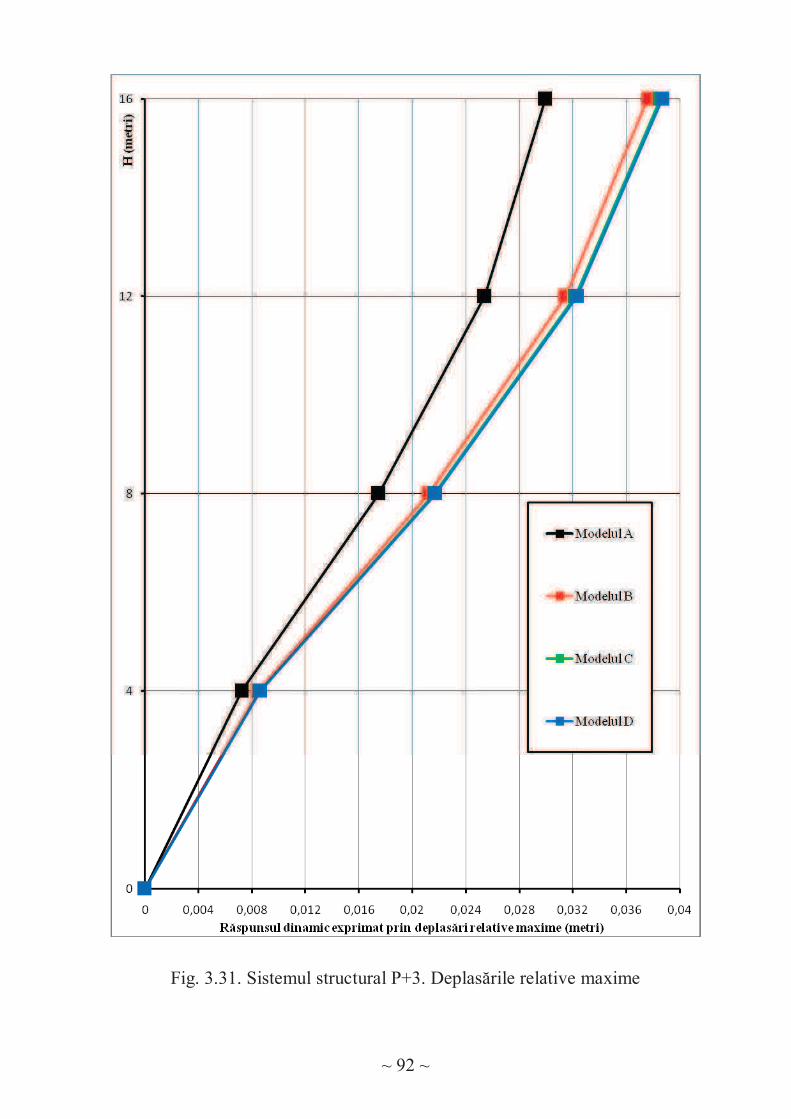
~ 92 ~
Fig. 3.31. Sistemul structural P+3. Deplasările relative maxime
~ 93 ~
CAPITOLUL 4
ABORDAREA TEORETICĂ A PROBLEMEI MODELĂRII SISTEMELOR DINAMICE STRUCTURALE
4.1. ASPECTE FUNDAMENTALE
4.1.1. Introducere
Modelul de calcul al unui sistem structural este modelul fizic căruia i se
ataşează un model matematic. În dinamica structurilor acesta este modelul dinamic. Analiza dinamică prin calcul a unui sistem structural se referă la modelul dinamic.
Un criteriu eficient de modelare dinamică a sistemelor structurale îl reprezintă modurile proprii de vibraţie. Variaţia modurilor proprii reprezintă măsura influenţei diferiţilor factori asupra răspunsului dinamic al structurilor. Problema determinării valorilor şi vectorilor proprii de vibraţie ocupă locul central în dinamica structurilor. Modurile proprii de vibraţie caracterizează sintetic sistemul structural din punct de vedere dinamic independent de acţiunile ce se exercită asupra sa [32]. Erorile valorilor proprii se regăsesc amplificate în răspunsul dinamic al sistemului structural. Pentru estimarea acestei “amplificări” se pot aplica norme vectoriale, norme matriceale etc. Totuşi, această abordare oferă numai limite superioare ale erorii răspunsului dinamic în funcţie de eroarea valorilor proprii. În capitolul 3 s-au prezentat cazuri practice privind relaţia dintre eroarea valorilor proprii şi eroarea răspunsului dinamic determinat prin calcul în cazul unor sisteme structurale ale construcţiilor.
În capitolele 4 şi 5 se generalizează o proprietate a sistemelor dinamice structurale modelate cu elemente finite, proprietate demonstrată pentru un caz particular în lucrarea [34]. Această proprietate permite determinarea directă şi imediată a erorii celei mai înalte frecvenţe proprii a unui sistem structural modelat cu elemente finite. Erorile celorlalte frecvenţe proprii, inclusiv cele joase, pot fi exprimate în funcţie de aceasta. În capitolul 5 al tezei de doctorat se propun relaţii de legătură între eroarea frecvenţei proprii cea mai înaltă şi celelalte frecvenţe proprii de vibraţie.
Proprietatea referitoare la acurateţea celei mai înalte valori proprii se va studia pentru:
vibraţiile axiale cu mase concentrate (cazul citat [34]); vibraţii axiale cu matricea maselor „consecventă”; vibraţii de torsiune cu matricea de inerţie diagonală; vibraţii de torsiune cu matricea de inerţie „consecventă”; vibraţii transversale (de încovoiere) cu matricea maselor diagonală; vibraţii transversale (de încovoiere) cu matricea maselor „consecventă”.
Aceste dezvoltări sunt aplicabile modelelor dinamic uniforme.
~ 94 ~
4.1.2. Modele geometric uniforme şi dinamic uniforme [57]
În cele ce urmează se precizează deosebirea dintre un model geometric uniform şi un model dinamic uniform. Uniformitatea geometrică se referă la discretizarea structurii în elemente finite de acelaşi tip şi aceleaşi dimensiuni geometrice. În general pot fi modelate geometric uniform numai structurile care au ele însele o anumită regularitate geometrică. Câteva exemple sunt prezentate în figura 4.1.
În figura 4.1,a s-a reprezentat o grindă dreaptă de secţiune constantă. În modelarea geometric uniformă discretizarea s-a făcut astfel încât nodurile 1, 2, …, n să fie dispuse la distanţe egale. În figurile 4.1, b şi c s-au reprezentat un cadru plan şi respectiv spaţial, pentru care nodurile modelului dinamic coincid cu nodurile efective ale structurii. În figura 4.1,d placa a fost discretizată în elemente finite dreptunghiulare egale, iar în figura 4.1,e pentru studiul vibraţiilor normale la planul reţelei de grinzi, nodurile modelului dinamic au fost considerate în nodurile efective ale reţelei.
Uniformitatea dinamică generalizează noţiunea de uniformitate geometrică. Se pot obţine modele dinamic uniforme şi pentru structuri care nu prezintă o regularitate geometrică. Definiţia modelului dinamic uniform este legată de formele proprii de vibraţie. Aceste forme sunt alcătuite din porţiuni cu convexitatea în acelaşi sens; porţiunile pot fi:
bucle sau semiunde separate de puncte de inflexiune ; suprafeţe separate de linii de inflexiune; porţiuni tridimensionale separate de suprafeţe de inflexiune.
Un model al structurii este dinamic uniform dacă fiecare porţiune de
acest fel are acelaşi număr de puncte nodale ale reţelei de elemente finite. În figura 4.2 s-a reprezentat o grindă dreaptă cu secţiunea bxh în zonele
marginale şi bx2h în zona centrală. Momentul de inerţie al secţiunii transversale în zona centrală este de opt ori mai mare decât în zonele marginale, pe când masa distribuită numai de două ori. Cele 12 puncte nodale din figura 4.2,b sunt distribuite astfel pe forma proprie din figura 4.2,c: câte un nod pe porţiunile marginale cu convexitatea în acelaşi sens AB, BC, CD, EF, FG şi GH şi şase noduri pe porţiunea centrală DE. Modelul devine dinamic uniform dacă pe porţiunea centrală DE se prevede un singur nod.
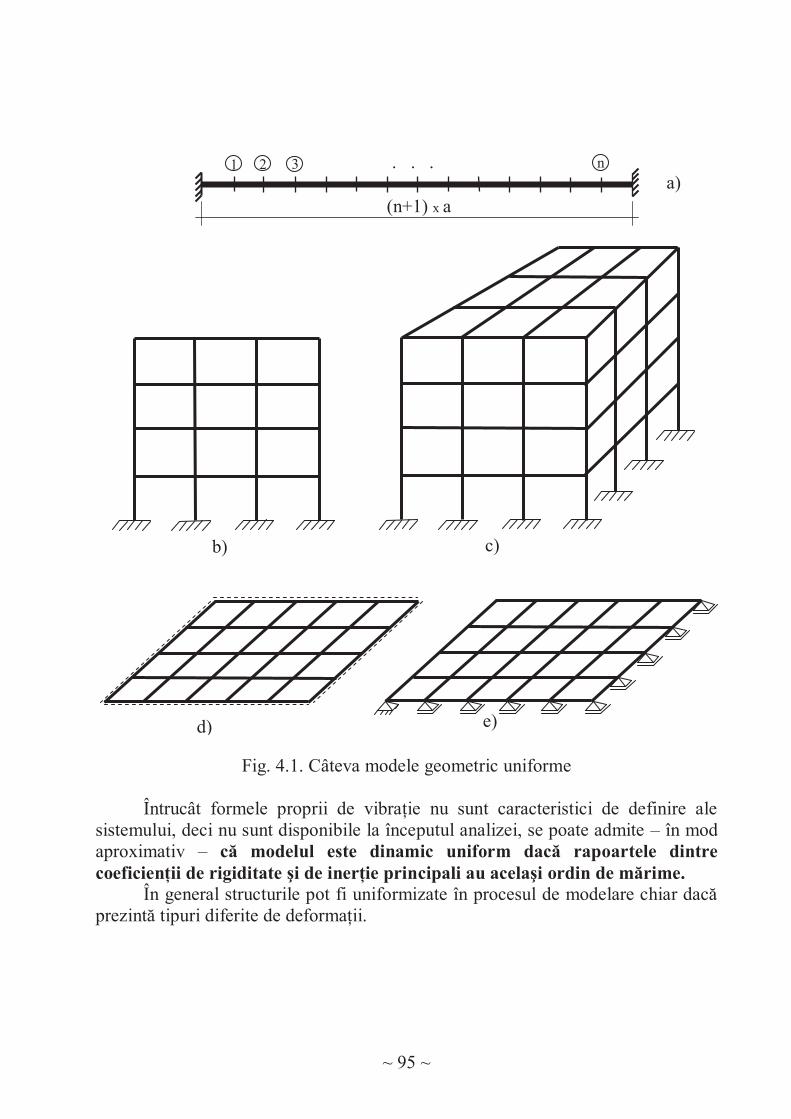
~ 95 ~
Fig. 4.1. Câteva modele geometric uniforme
Întrucât formele proprii de vibraţie nu sunt caracteristici de definire ale
sistemului, deci nu sunt disponibile la începutul analizei, se poate admite – în mod aproximativ – că modelul este dinamic uniform dacă rapoartele dintre
coeficienţii de rigiditate şi de inerţie principali au acelaşi ordin de mărime. În general structurile pot fi uniformizate în procesul de modelare chiar dacă
prezintă tipuri diferite de deformaţii.
d)
1 2 3 n . . .
(n+1) x a a)
b) c)
e)
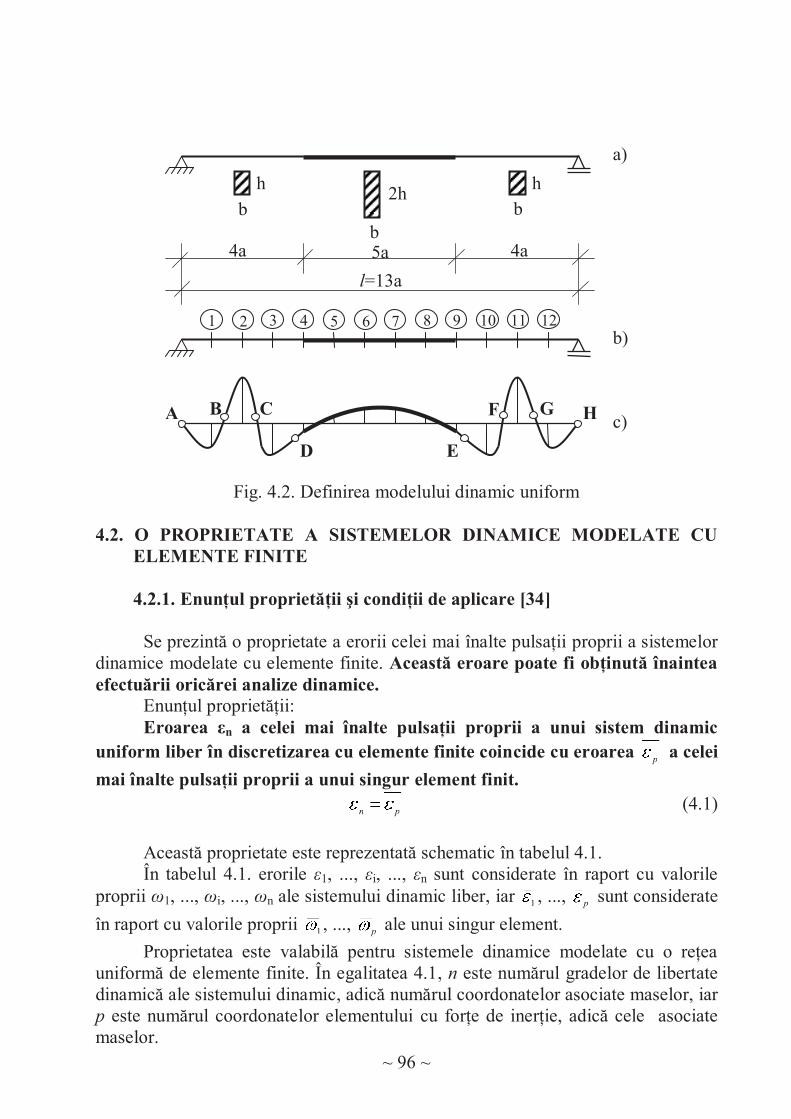
~ 96 ~
Fig. 4.2. Definirea modelului dinamic uniform
4.2. O PROPRIETATE A SISTEMELOR DINAMICE MODELATE CU
ELEMENTE FINITE
4.2.1. Enunţul proprietăţii şi condiţii de aplicare [34]
Se prezintă o proprietate a erorii celei mai înalte pulsaţii proprii a sistemelor dinamice modelate cu elemente finite. Această eroare poate fi obţinută înaintea efectuării oricărei analize dinamice. Enunţul proprietăţii: Eroarea εn a celei mai înalte pulsaţii proprii a unui sistem dinamic
uniform liber în discretizarea cu elemente finite coincide cu eroarea pp a celei
mai înalte pulsaţii proprii a unui singur element finit.
pn pn (4.1)
Această proprietate este reprezentată schematic în tabelul 4.1. În tabelul 4.1. erorile ε1, ..., εi, ..., εn sunt considerate în raport cu valorile proprii ω1, ..., ωi, ..., ωn ale sistemului dinamic liber, iar 11 , ...,
pp sunt considerate
în raport cu valorile proprii 11 , ..., pp ale unui singur element.
Proprietatea este valabilă pentru sistemele dinamice modelate cu o reţea uniformă de elemente finite. În egalitatea 4.1, n este numărul gradelor de libertate dinamică ale sistemului dinamic, adică numărul coordonatelor asociate maselor, iar p este numărul coordonatelor elementului cu forţe de inerţie, adică cele asociate maselor.
4a 4a 5a
l=13a
h h
b b b
2h
10 11 12 9 8 7 6 5 4 3 2 1
B C
D E
F A G H
a)
b)
c)
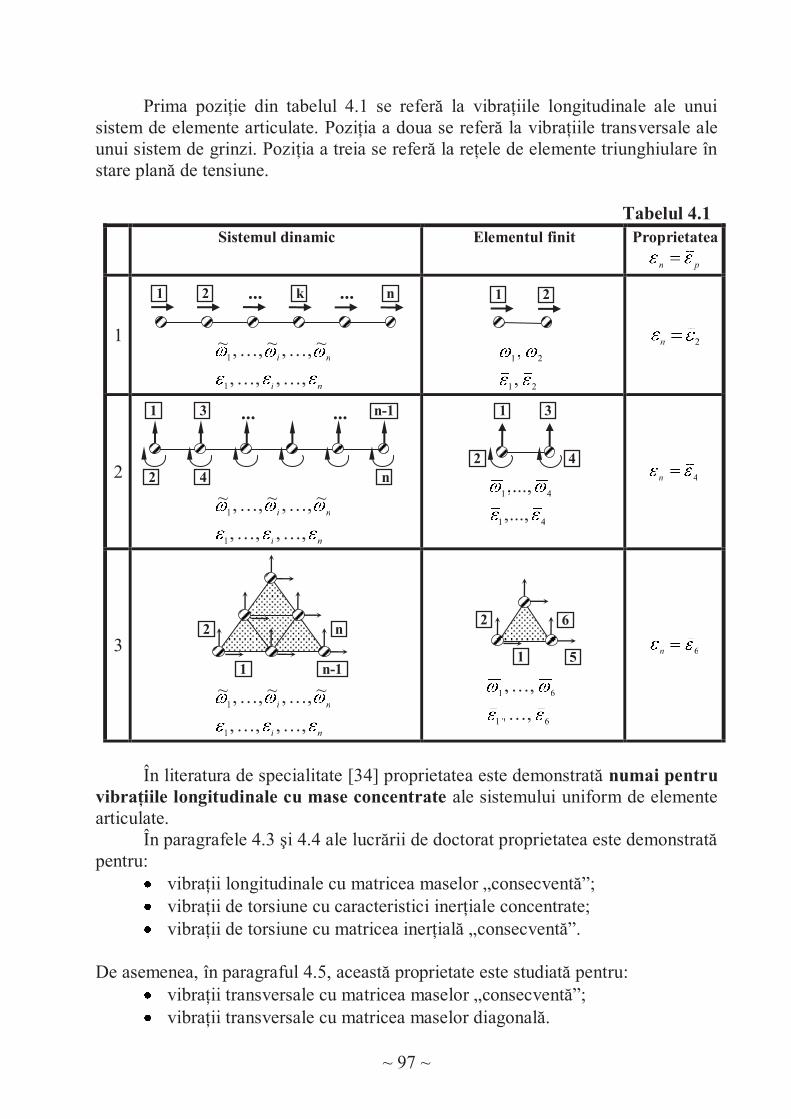
~ 97 ~
Prima poziţie din tabelul 4.1 se referă la vibraţiile longitudinale ale unui sistem de elemente articulate. Poziţia a doua se referă la vibraţiile transversale ale unui sistem de grinzi. Poziţia a treia se referă la reţele de elemente triunghiulare în stare plană de tensiune.
Tabelul 4.1
Sistemul dinamic Elementul finit Proprietatea
pn pn
1
ni
ni
ni
ni
,,,,
~,,~,,~
1
1
KK
KK
21
21
,
,
21 ,21 ,
22n
2
ni
ni
ni
ni
,,,,
~,,~,,~
1
1
KK
KK
41
41
...,,
...,,
41,41 .,
44n
3
ni
ni
ni
ni
,,,,
~,,~,,~
1
1
KK
KK
61
61
,,
,,
61 ,61 ,
K
K
66n
În literatura de specialitate [34] proprietatea este demonstrată numai pentru
vibraţiile longitudinale cu mase concentrate ale sistemului uniform de elemente articulate. În paragrafele 4.3 şi 4.4 ale lucrării de doctorat proprietatea este demonstrată pentru:
vibraţii longitudinale cu matricea maselor „consecventă”; vibraţii de torsiune cu caracteristici inerţiale concentrate; vibraţii de torsiune cu matricea inerţială „consecventă”.
De asemenea, în paragraful 4.5, această proprietate este studiată pentru:
vibraţii transversale cu matricea maselor „consecventă”; vibraţii transversale cu matricea maselor diagonală.
2
1
6
5 1
2
n-1
n
1 3
4 2
... ...
2
n-1 1 3
4 n
1 2 ... ... 2 k n 1
~ 98 ~
Această proprietate este valabilă pentru sisteme dinamice libere. Dacă sistemul dinamic are legături atunci egalitatea 4.1 se transformă în general în inegalitatea:
pn pn (4.2)
Eroarea εn este mai apropiată de pp dacă numărul punctelor nodale cu
legături este mic faţă de numărul total al punctelor nodale ale sistemului discret liber.
4.2.2. Structuri spaţiale alcătuite din elemente tip grindă de secţiune constantă
Elementul component este reprezentat în figura 4.3. Elementul tip grindă are 12 coordonate care pot fi grupate astfel:
- axele 1 şi 7 – vibraţii longitudinale - axele 4 şi 10 – vibraţii de torsiune - axele 2, 6, 8, 12 – vibraţii transversale în planul Oxy - axele 3, 5, 9, 11 – vibraţii transversale în planul Oxz
Tipurile de vibraţii sunt analizate în paragrafele 4.3, 4.4 şi 4.5 din punctul de
vedere al proprietăţii enunţate în secţiunea 4.2.1. În capitolul 5 proprietatea enunţată este analizată pentru sistemele dinamice
cu legături, iar în capitolul 6 studiul se aplică în calculul dinamic geometric neliniar.
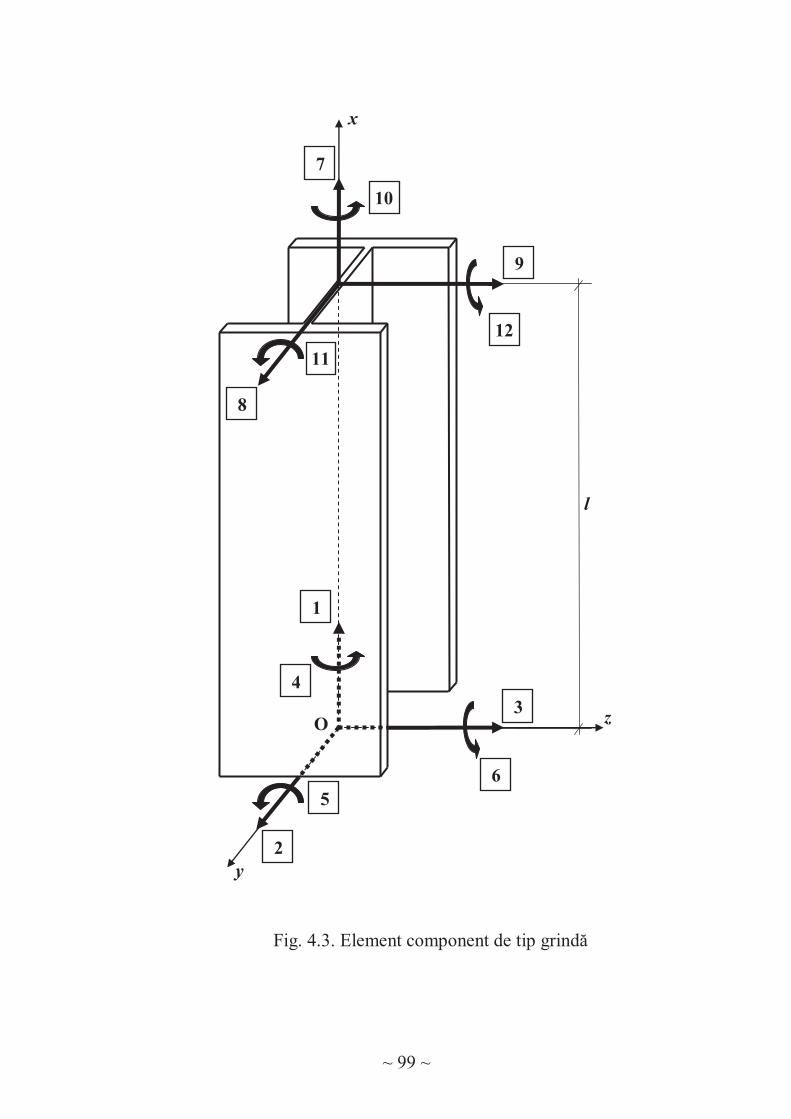
~ 99 ~
Fig. 4.3. Element component de tip grindă
z
x
y
l
11
7
9
3
1
5
12
10
8
2
6
4
O
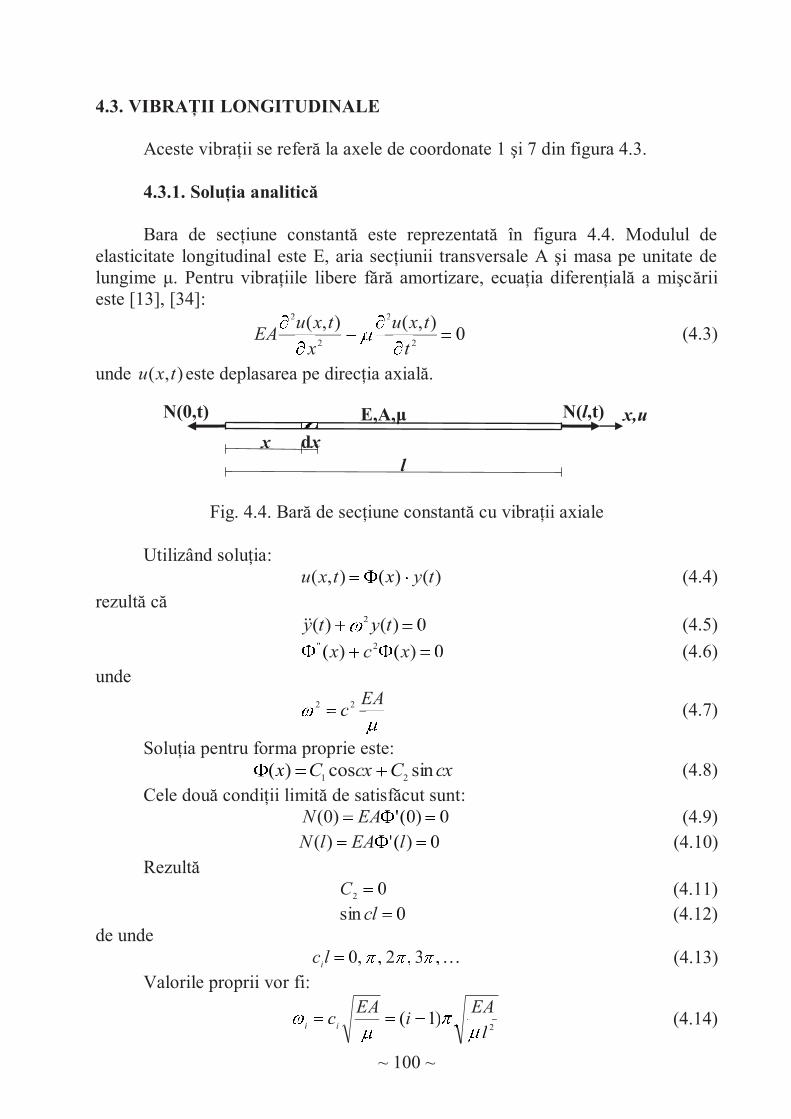
~ 100 ~
4.3. VIBRAŢII LONGITUDINALE
Aceste vibraţii se referă la axele de coordonate 1 şi 7 din figura 4.3.
4.3.1. Soluţia analitică
Bara de secţiune constantă este reprezentată în figura 4.4. Modulul de elasticitate longitudinal este E, aria secţiunii transversale A şi masa pe unitate de lungime μ. Pentru vibraţiile libere fără amortizare, ecuaţia diferenţială a mişcării este [13], [34]:
0),(),(
2
2
2
2
02
22
t
txu
x
txuEA (4.3)
unde ),( txu este deplasarea pe direcţia axială.
Fig. 4.4. Bară de secţiune constantă cu vibraţii axiale
Utilizând soluţia:
)()(),( tyxtxu y)(x (4.4) rezultă că
0)()( 2 0tyty 2 y&& (4.5)
0)()( 2" 0)((" xcx (4.6) unde
EAc 22 c (4.7)
Soluţia pentru forma proprie este:cxCcxCx sincos)( 21 CCx)( (4.8)
Cele două condiţii limită de satisfăcut sunt: 0)0(')0( 00('EAN (4.9)
0)(')( 0(' lEAlN (4.10) Rezultă
02 0C (4.11) 0sin 0cl (4.12)
de unde K,3,2,,0 ,,2,0lc
i (4.13) Valorile proprii vor fi:
2)1(
l
EAi
EAc
ii 2li
1(c (4.14)
N(l,t) N(0,t)
x
x,u
dx
l
E,A,μ
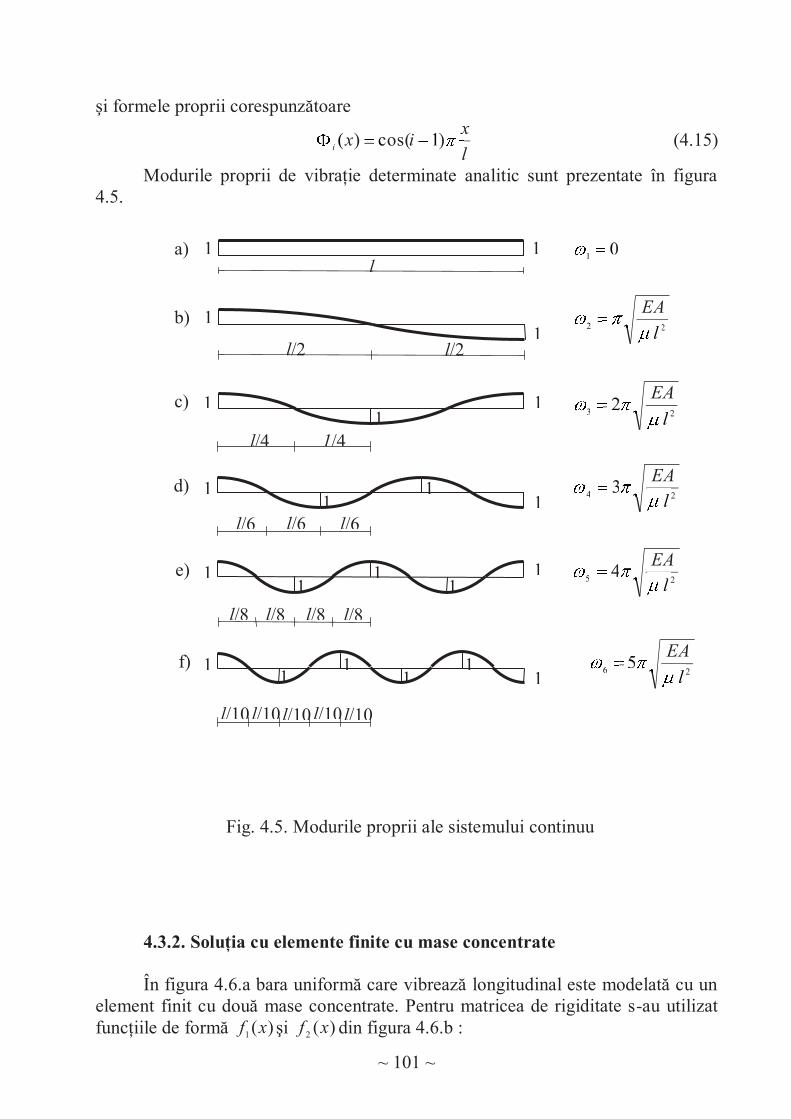
~ 101 ~
şi formele proprii corespunzătoare
l
xix
il
x)1cos()( 1cx
i( (4.15)
Modurile proprii de vibraţie determinate analitic sunt prezentate în figura 4.5.
4.3.2. Soluţia cu elemente finite cu mase concentrate
În figura 4.6.a bara uniformă care vibrează longitudinal este modelată cu un element finit cu două mase concentrate. Pentru matricea de rigiditate s-au utilizat funcţiile de formă )(1 xf şi )(2 xf din figura 4.6.b :
1 1 l
01 01 a)
1 b) 1
22l
EA2l
2
l/2 l/2
c) 1 1
1 23 2
l
EA2l
23 2
1/4 l/4
d) 1
1 1
1 24 3l
EA2l
4 3
l/6 l/6 l/6
25 4l
EA2l
45 4 e) 1 1
1 1 1
l/8 l/8 l/8 l/8
26 5l
EA2l
56 5 f) 1 1
1 1
1 1
l/10 l/10 l/10 l/10 l/10
Fig. 4.5. Modurile proprii ale sistemului continuu
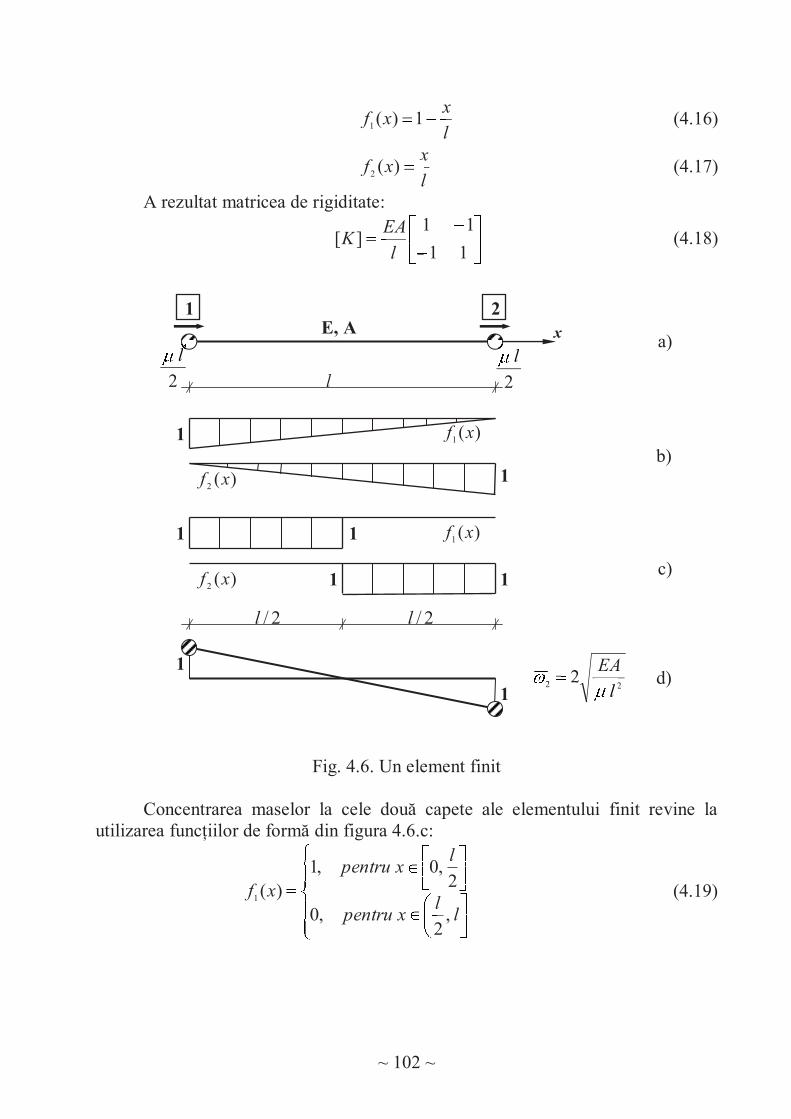
~ 102 ~
l
xxf
l
x1)(1 (4.16)
l
xxf
l
x)(2 (4.17)
A rezultat matricea de rigiditate:
11
11][
l
EAK (4.18)
Fig. 4.6. Un element finit
Concentrarea maselor la cele două capete ale elementului finit revine la utilizarea funcţiilor de formă din figura 4.6.c:
ll
xpentru
lxpentru
xf
,2
,0
2,0,1
)(1 (4.19)
1 2
1
E, A
l 2
ll
2
ll
a)
1
1
)(1 xf
)(2 xf
b)
1 1 )(1 xf
)(2 xf 1 1 c)
2/l 2/l
1 d) 22 2
l
EA2l
2 2
x

~ 103 ~
ll
xpentru
lxpentru
xf
,2
,1
2,0,0
)(2 (4.20)
Rezultă:
10
01
2][
lM
l (4.21)
Utilizarea unor funcţii de formă diferite la matricea maselor faţă de matricea de rigiditate reprezintă o „inconsecvenţă” în cazul concentrării maselor la noduri. Problema modurilor proprii:
}{][}{][ 2 }} MK [2 M (4.22)
unde {Φ} este un vector propriu şi ω pulsaţia proprie corespunzătoare, are soluţia:
221 2,0l
EA2l
21 20 (4.23)
Soluţia analitică pentru 22 este 2l
EA2l
astfel că eroarea 22 va fi :
%34,361002
%2 312
2 (4.24)
Al doilea mod propriu de vibraţie este prezentat în figura 4.6.d. În figura 4.7.a bara uniformă s-a modelat cu două elemente finite cu masa concentrată în trei puncte. Matricele de rigiditate şi a maselor sunt:
100
020
001
4][,
110
121
0112
][l
Ml
EAK
l (4.25)
Problema vectorilor proprii (4.22) conduce la:
23221 4~,8~,0~
l
EA
l
EA2l
3~
2l2
~1
~ 40 (4.26)
Ultimul mod propriu de vibraţie este reprezentat în figura 4.7.b. Eroarea ultimei valori proprii este:
%34.361002
42%3 31
42
2
2%3 (4.27)
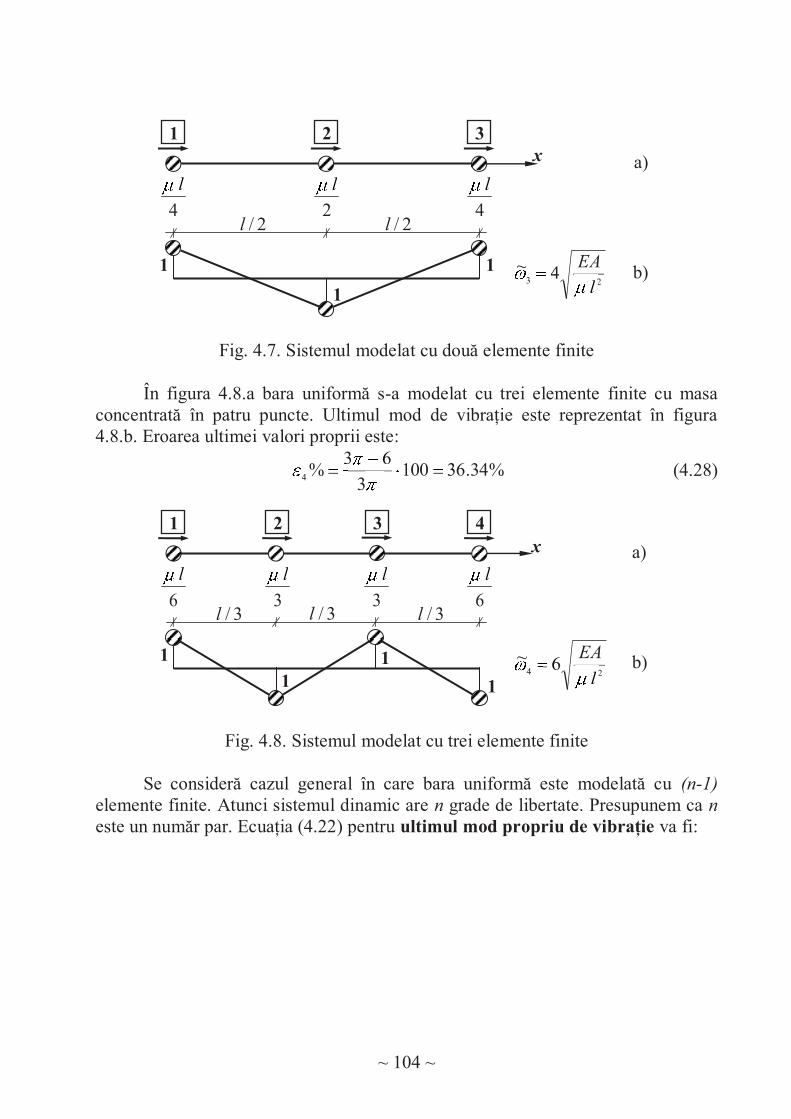
~ 104 ~
Fig. 4.7. Sistemul modelat cu două elemente finite
În figura 4.8.a bara uniformă s-a modelat cu trei elemente finite cu masa concentrată în patru puncte. Ultimul mod de vibraţie este reprezentat în figura 4.8.b. Eroarea ultimei valori proprii este:
%34.361003
63%4 31
634 (4.28)
Fig. 4.8. Sistemul modelat cu trei elemente finite
Se consideră cazul general în care bara uniformă este modelată cu (n-1) elemente finite. Atunci sistemul dinamic are n grade de libertate. Presupunem ca n este un număr par. Ecuaţia (4.22) pentru ultimul mod propriu de vibraţie va fi:
1 3 2
6
ll
3
ll
6
ll
3/l 3/l
1
1
1
a)
b) 24 6~
l
EA2l
4~ 6
4
3/l 3
ll
1
x
1 3 2
4
ll
2
ll
4
ll
2/l 2/l
1 1
1
a)
b) 23 4~
l
EA2l
3~ 4
x

~ 105 ~
1
1
1
1
1
1
2
4
4
4
4
2
)1(4~
1
1
1
1
1
1
110000
120000
002100
001210
000121
000011
)1(
2
LL
L
K
K
LLLLLLL
K
K
K
K
zero
zero
n
l
l
EAn
n
l
4~~ 2
n
(4.29)
Rezultă:
2)1(2~
l
EAn
n 2l
~n
12 (4.30)
Soluţia analitică are expresia (4.14) în care i=n şi eroarea ultimei pulsaţii proprii va fi:
%34,36%1002
100)1(
)1(2)1(100
~% 2 31
21
1
121(1 2
~~
n
nn
n
nn
n (4.31)
În concluzie eroarea
nn a ultimei pulsaţii proprii a sistemului dinamic este
egală cu eroarea 22 a ultimei pulsaţii proprii a unui singur element finit. Proprietatea s-a demonstrat pentru orice număr n par. Dacă n este impar, vectorul propriu n}
~{ n}
~din relaţia (4.29) are în ultima
poziţie valoarea 1 şi egalitatea (4.29) rămâne valabilă.
4.3.3. Soluţia cu elemente finite cu matricea maselor „consecventă” În figura 4.9.a bara uniformă care vibrează longitudinal este modelată cu un element finit având două grade de libertate dinamică.
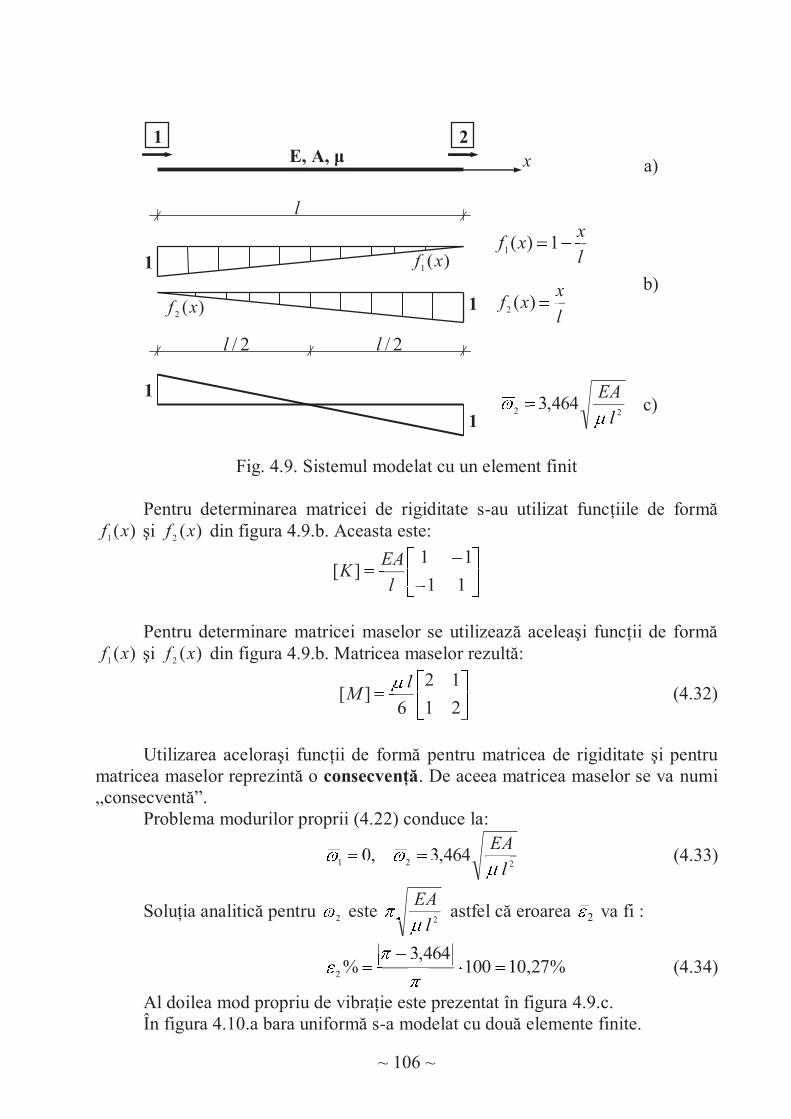
~ 106 ~
Fig. 4.9. Sistemul modelat cu un element finit
Pentru determinarea matricei de rigiditate s-au utilizat funcţiile de formă
)(1 xf şi )(2 xf din figura 4.9.b. Aceasta este:
11
11][
l
EAK
Pentru determinare matricei maselor se utilizează aceleaşi funcţii de formă
)(1 xf şi )(2 xf din figura 4.9.b. Matricea maselor rezultă:
21
12
6][
lM
l (4.32)
Utilizarea aceloraşi funcţii de formă pentru matricea de rigiditate şi pentru matricea maselor reprezintă o consecvenţă. De aceea matricea maselor se va numi „consecventă”. Problema modurilor proprii (4.22) conduce la:
221 464,3,0l
EA2l
21 30 (4.33)
Soluţia analitică pentru 22 este 2l
EA2l
astfel că eroarea 22 va fi :
%27,10100464,3
%2 113
2 (4.34)
Al doilea mod propriu de vibraţie este prezentat în figura 4.9.c. În figura 4.10.a bara uniformă s-a modelat cu două elemente finite.
b)
1 2
1
E, A, μ
l
a)
1
1
)(1 xf
)(2 xf
2/l 2/l
1 c) 22 464,3
l
EA2l
2 3
x
l
xxf
l
x1)(1
l
xxf
l
x)(2
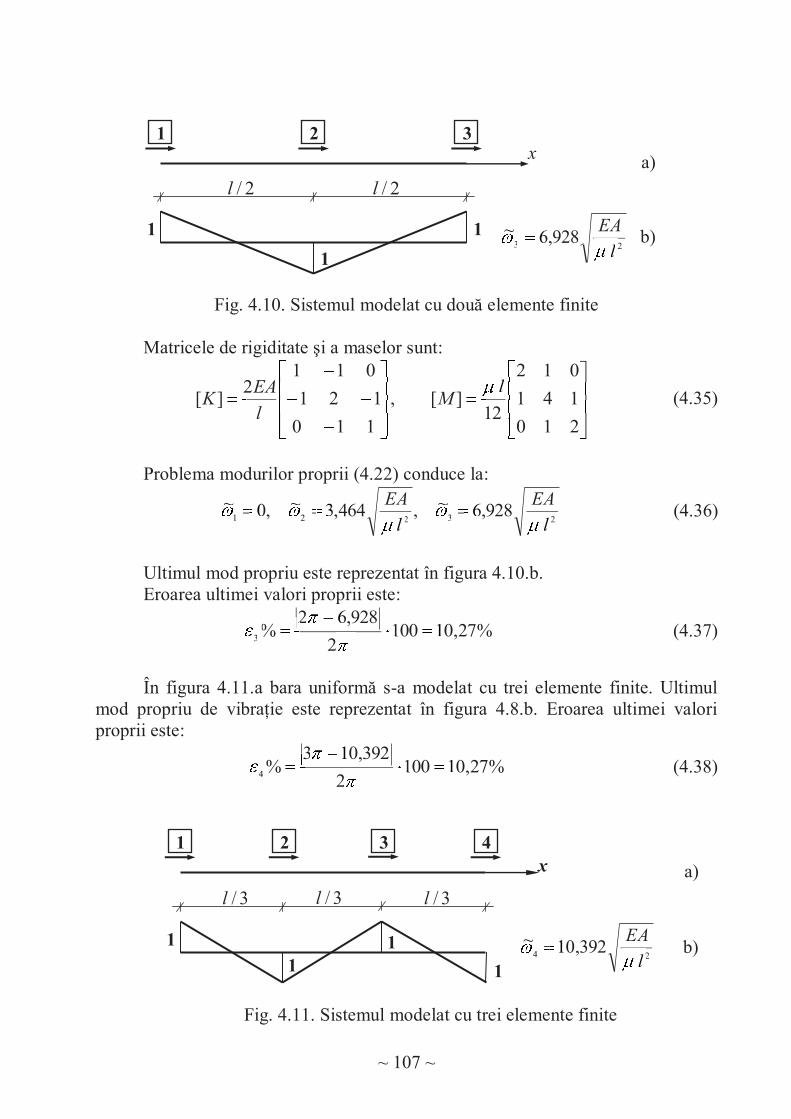
~ 107 ~
Fig. 4.10. Sistemul modelat cu două elemente finite
Matricele de rigiditate şi a maselor sunt:
210
141
012
12][,
110
121
0112
][l
Ml
EAK
l (4.35)
Problema modurilor proprii (4.22) conduce la:
23221 928,6~,464,3~,0~l
EA
l
EA2l
3~
2l2
~1
~ 630 (4.36)
Ultimul mod propriu este reprezentat în figura 4.10.b. Eroarea ultimei valori proprii este:
%27,101002
928,62%3 11
62
2
2%3 (4.37)
În figura 4.11.a bara uniformă s-a modelat cu trei elemente finite. Ultimul
mod propriu de vibraţie este reprezentat în figura 4.8.b. Eroarea ultimei valori proprii este:
%27,101002
392,103%4 11
13
2
34 (4.38)
Fig. 4.11. Sistemul modelat cu trei elemente finite
a)
b)
1 3 2
3/l 3/l
1
1
1 24 392,10~
l
EA2l
4~ 1
4
3/l
1
x
1 3 2
2/l 2/l
1 1
1
a)
b) 23 928,6~
l
EA2l
3~ 6
x

~ 108 ~
Se consideră cazul general, în care bara uniformă este modelată cu (n-1)
elemente finite. Atunci sistemul dinamic are n grade de libertate. Presupunem că n este un număr par. Ecuaţia (4.22) pentru ultimul mod propriu va fi:
1
1
1
1
1
1
210000
140000
004100
001410
000141
000012
)1(6~
1
1
1
1
1
1
110000
120000
002100
001210
000121
000011
)1(
2
L
K
K
LLLLLLL
K
K
K
K
L
K
K
LLLLLLL
K
K
K
K
n
l
l
EAn
n
l
6~~ 2
n
(4.39)
Rezultă că:
2)1(32~
l
EAn
n 2l
~n
12 (4.40)
Soluţia analitică are expresia (4.14) în care ni n şi eroarea ultimei pulsaţii proprii va fi:
%27,1010032
100)1(
)1(32)1(100
~% 11
21
1
121(1
)
)~~
n
nn
n
nn
n
(4.41)
În concluzie eroarea nn a ultimei pulsaţii proprii a sistemului dinamic este egală cu eroarea 22 a ultimei pulsaţii proprii a unui singur element finit. Proprietatea s-a demonstrat pentru orice număr n par. Dacă n este impar, vectorul propriu n}
~{ n}
~ din relaţia (4.39) are în ultima
poziţie valoarea 1 şi egalitatea (4.39) rămâne valabilă.

~ 109 ~
4.4. VIBRAŢII DE TORSIUNE
4.4.1. Soluţia analitică
Bara de secţiune constantă este reprezentată în figura 4.12. Modulul de
elasticitate transversal este G şi momentul de inerţie la torsiune It . Momentul de inerţie mecanic în raport cu centrul de greutate al secţiunii transversale pe unitatea de lungime este J. Pentru vibraţiile libere fără amortizare , ecuaţia diferenţială a mişcării este [48]:
0),(),(
2
2
2
2
02
22
t
txJ
x
txGIt
(x(x (4.39)
unde φ(x,t) este rotirea secţiunii transversale în jurul axei longitudinale a barei [45].
Fig. 4.12. Bară omogenă de secţiune constantă supusă la
vibraţii de torsiune libere fără amortizare
Utilizând soluţia: )()(),( tyxtx y)(x(x (4.40)
rezultă că 0)()( 2 0tyty 2 y&& (4.41)
0)()( 2" 0)((" xcx (4.42) unde
J
GIc t22 c2 (4.43)
Soluţia pentru forma proprie este:
cxCcxCx sincos)( 21 CpCx)( (4.44)
Cele două condiţii limită de satisfăcut sunt: 0)0(')0( 00('
ttIGM (4.45)
0)(')( 0(' lIGlMtt
(4.46) Rezultă
02 0C (4.47) 0sin 0cl (4.48)
de unde
Mt(0,t) Mt(l,t)
x
x
dx
l
G,It,J φ
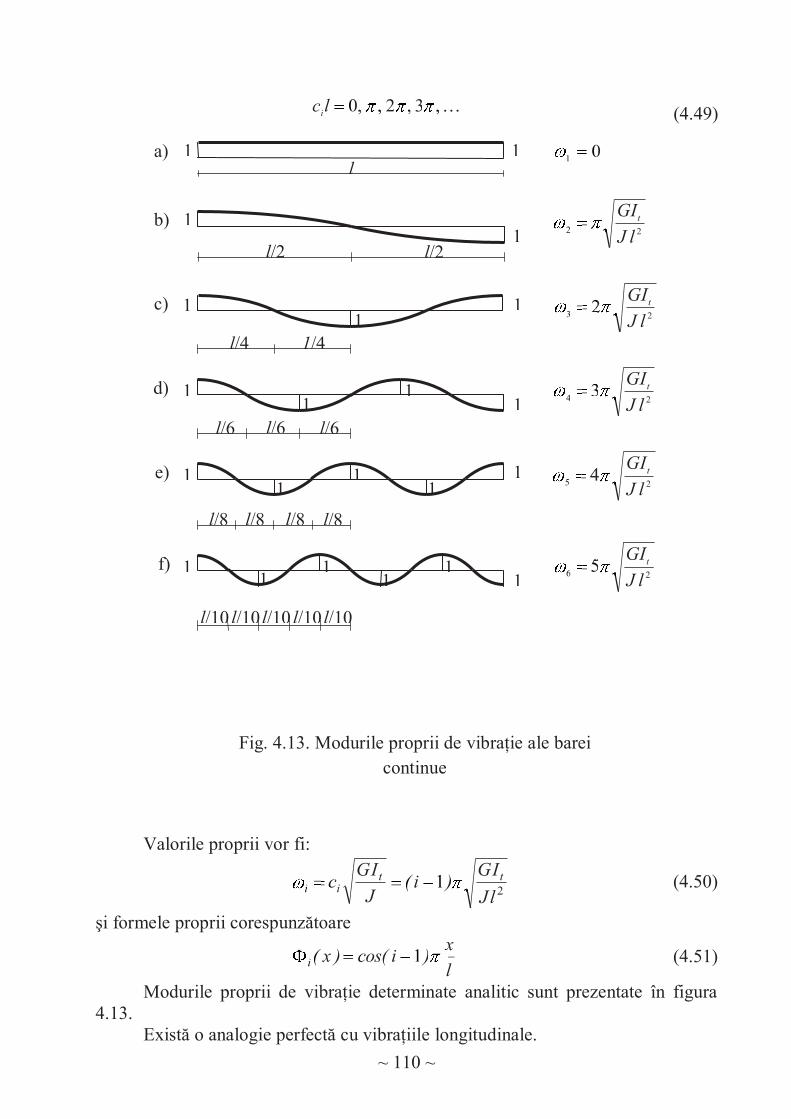
~ 110 ~
K,3,2,,0 ,,2,0lci (4.49)
Valorile proprii vor fi:
21
lJ
IG)i(
J
IGc tt
ii )i 1(c (4.50)
şi formele proprii corespunzătoare
l
x)icos()x(i
l
x)11cx(i (4.51)
Modurile proprii de vibraţie determinate analitic sunt prezentate în figura 4.13. Există o analogie perfectă cu vibraţiile longitudinale.
1 1 l
01 01 a)
1 b) 1
22lJ
GIt
2
l/2 l/2
c) 1 1
1 23 2
lJ
GIt23 2
1/4 l/4
d) 1
1 1
1 24 3
lJ
GIt34 3
l/6 l/6 l/6
e) 25 4
lJ
GIt45 4 1
1 1 1
1
l/8 l/8 l/8 l/8
f) 26 5
lJ
GIt56 5 1
1 1
1 1
1
l/10 l/10 l/10 l/10 l/10
Fig. 4.13. Modurile proprii de vibraţie ale barei continue
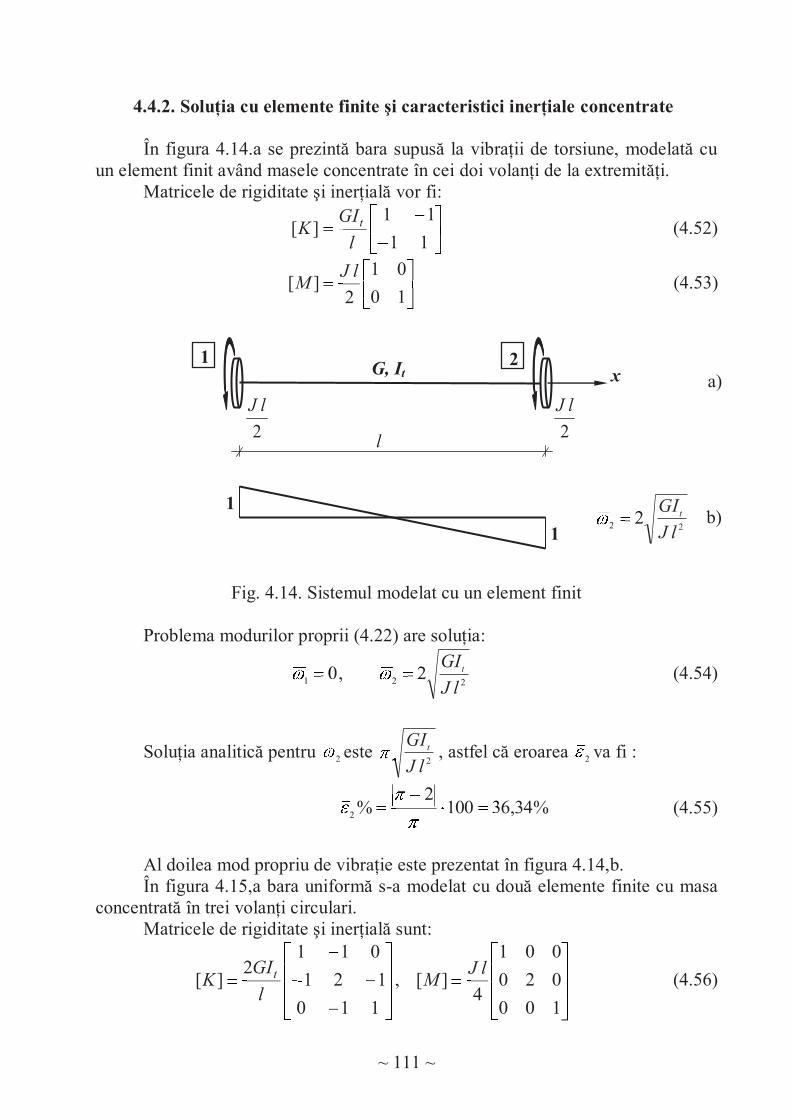
~ 111 ~
4.4.2. Soluţia cu elemente finite şi caracteristici inerţiale concentrate
În figura 4.14.a se prezintă bara supusă la vibraţii de torsiune, modelată cu un element finit având masele concentrate în cei doi volanţi de la extremităţi.
Matricele de rigiditate şi inerţială vor fi:
11
11][
l
GIK t (4.52)
10
01
2][
lJM (4.53)
Fig. 4.14. Sistemul modelat cu un element finit
Problema modurilor proprii (4.22) are soluţia:
221 2,0lJ
GIt20 21 (4.54)
Soluţia analitică pentru 22 este 2lJ
GIt , astfel că eroarea 22 va fi :
%34,361002
%2 312
2 (4.55)
Al doilea mod propriu de vibraţie este prezentat în figura 4.14,b. În figura 4.15,a bara uniformă s-a modelat cu două elemente finite cu masa concentrată în trei volanţi circulari. Matricele de rigiditate şi inerţială sunt:
100
020
001
4][,
110
121
0112
][lJ
Ml
GIK t (4.56)
1 2 G, It
2
lJ
2
lJ
a)
1
l
1
b) 22 2
lJ
GIt22
x
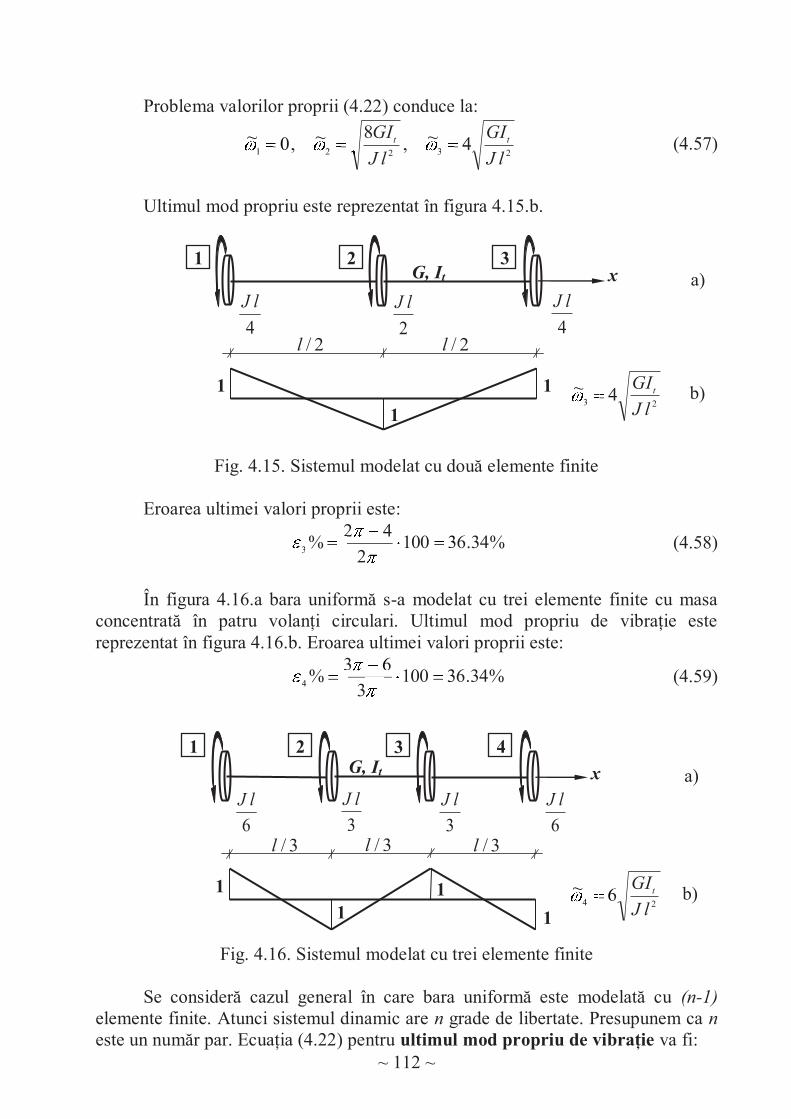
~ 112 ~
Problema valorilor proprii (4.22) conduce la:
23221 4~,8~,0~
lJ
GI
lJ
GItt 40 3
~2
~1
~ (4.57)
Ultimul mod propriu este reprezentat în figura 4.15.b.
Fig. 4.15. Sistemul modelat cu două elemente finite
Eroarea ultimei valori proprii este:
%34.361002
42%3 31
42
2
2%3 (4.58)
În figura 4.16.a bara uniformă s-a modelat cu trei elemente finite cu masa concentrată în patru volanţi circulari. Ultimul mod propriu de vibraţie este reprezentat în figura 4.16.b. Eroarea ultimei valori proprii este:
%34.361003
63%4 31
634 (4.59)
Fig. 4.16. Sistemul modelat cu trei elemente finite
Se consideră cazul general în care bara uniformă este modelată cu (n-1) elemente finite. Atunci sistemul dinamic are n grade de libertate. Presupunem ca n este un număr par. Ecuaţia (4.22) pentru ultimul mod propriu de vibraţie va fi:
1 3 2
4
lJ
2/l 2/l
1 1
1
a)
b) 23 4~
lJ
GIt43
~
2
lJ
4
lJ
x G, It
1 3 2
6
lJ
3/l 3/l
1
1
1
a)
b) 24 6~
lJ
GIt64
~
4
3/l
1
x
3
lJ
3
lJ
6
lJ
G, It

~ 113 ~
1
1
1
1
1
1
2
4
4
4
4
2
)1(4~
1
1
1
1
1
1
110000
120000
002100
001210
000121
000011
)1(
2
LL
L
K
K
LLLLLLL
K
K
K
K
zero
zero
n
lJ
l
GIn
n
t
4~~ 2
n
(4.60) Rezultă că
2)1(2~
lJ
GIn t
n 12~n (4.61)
Soluţia analitică are expresia (4.50) în care i=n şi eroarea ultimei pulsaţii proprii va fi:
%34,36%1002
100)1(
)1(2)1(100
~% 2 31
21
1
121(1 2
~~
n
nn
n
nn
n (4.62)
În concluzie, eroarea
nna ultimei pulsaţii proprii a sistemului dinamic liber
este egală cu eroarea 22 a ultimei pulsaţii proprii a unui singur element finit. Proprietatea s-a demonstrat pentru orice număr n par. Dacă n este impar, vectorul propriu n}
~{ n}
~din relaţia (4.60) are în ultima
poziţie valoarea 1 şi egalitatea (4.60) rămâne valabilă.
4.4.3. Soluţia cu elemente finite şi matricea inerţială „consecventă”
În figura 4.17,a bara uniformă ce vibrează la torsiune este modelată cu un element finit, având două grade de libertate. Pentru determinarea matricelor de rigiditate şi inerţială s-au utilizat funcţiile de formă )(1 xf şi )(2 xf din figura 4.9.b. Aceste matrice sunt:
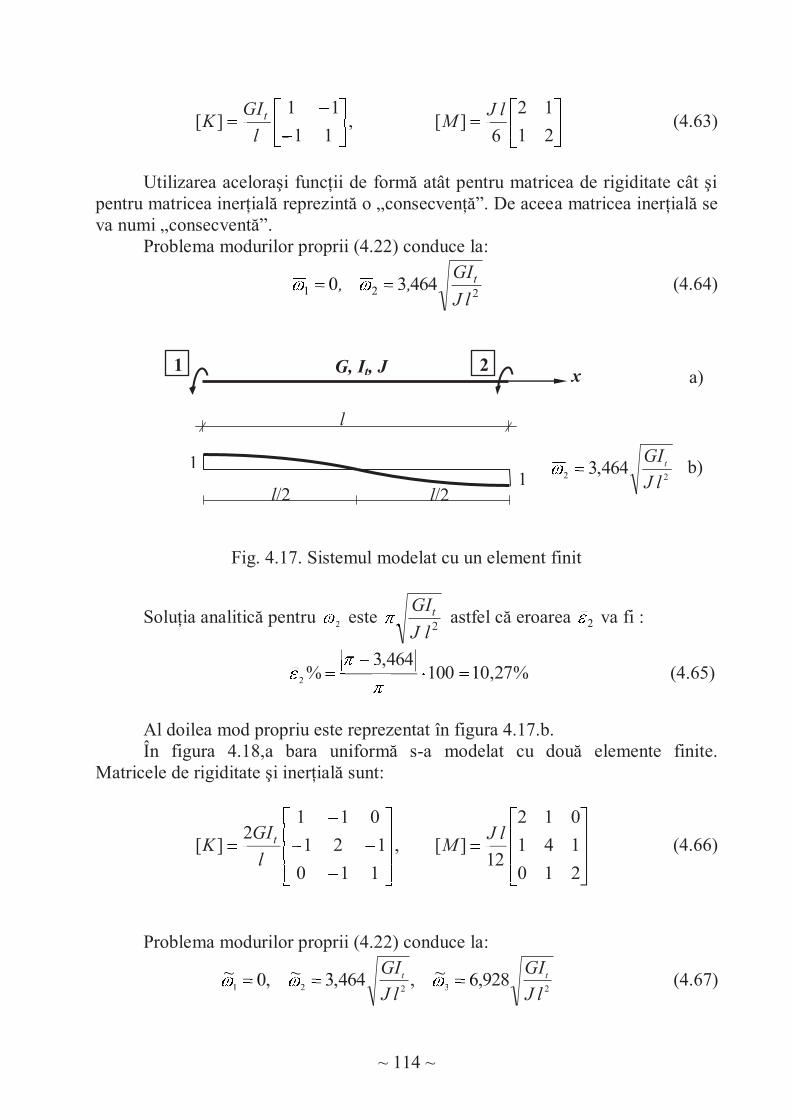
~ 114 ~
11
11][
l
GIK t ,
21
12
6][
lJM (4.63)
Utilizarea aceloraşi funcţii de formă atât pentru matricea de rigiditate cât şi pentru matricea inerţială reprezintă o „consecvenţă”. De aceea matricea inerţială se va numi „consecventă”. Problema modurilor proprii (4.22) conduce la:
221 46430
lJ
GI,, t30 21 (4.64)
Fig. 4.17. Sistemul modelat cu un element finit
Soluţia analitică pentru 22 este 2lJ
GIt astfel că eroarea 22 va fi :
%27,10100464,3
%2 113
2 (4.65)
Al doilea mod propriu este reprezentat în figura 4.17.b. În figura 4.18,a bara uniformă s-a modelat cu două elemente finite. Matricele de rigiditate şi inerţială sunt:
210
141
012
12][,
110
121
0112
][lJ
Ml
GIK t (4.66)
Problema modurilor proprii (4.22) conduce la:
23221 928,6~,464,3~,0~lJ
GI
lJ
GItt 630 3
~2
~1
~ (4.67)
1 2 G, It, J
l
a)
22 464,3lJ
GIt32
x
b) 1
1
l/2 l/2
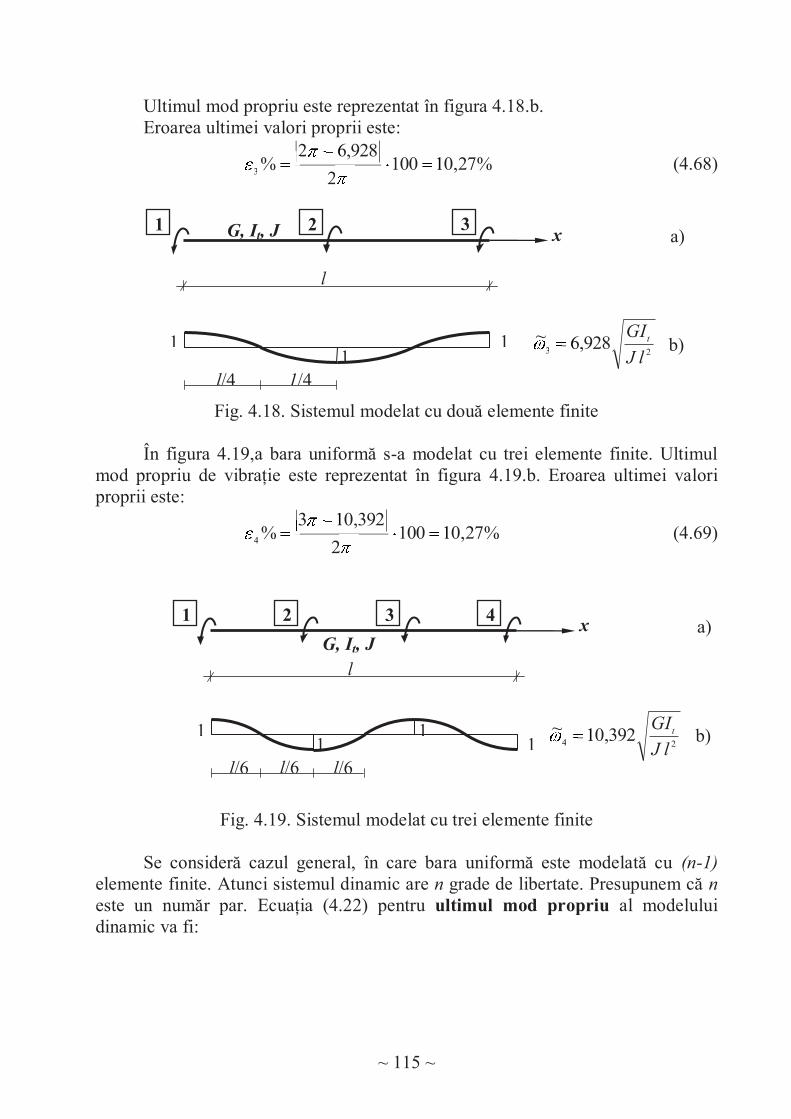
~ 115 ~
Ultimul mod propriu este reprezentat în figura 4.18.b. Eroarea ultimei valori proprii este:
%27,101002
928,62%3 11
62
2
2%3 (4.68)
Fig. 4.18. Sistemul modelat cu două elemente finite
În figura 4.19,a bara uniformă s-a modelat cu trei elemente finite. Ultimul mod propriu de vibraţie este reprezentat în figura 4.19.b. Eroarea ultimei valori proprii este:
%27,101002
392,103%4 11
13
2
34 (4.69)
Fig. 4.19. Sistemul modelat cu trei elemente finite
Se consideră cazul general, în care bara uniformă este modelată cu (n-1)
elemente finite. Atunci sistemul dinamic are n grade de libertate. Presupunem că n este un număr par. Ecuaţia (4.22) pentru ultimul mod propriu al modelului dinamic va fi:
1 3
G, It, J
l
a) x
b)
2
1 1
1 1
24 392,10~lJ
GIt14
~
l/6 l/6 l/6
4
a) 1 3 G, It, J
l
x
b) 1 1
1 23 928,6~
lJ
GIt63
~
1/4 l/4
2

~ 116 ~
1
1
1
1
1
1
210000
140000
004100
001410
000141
000012
)1(6~
1
1
1
1
1
1
110000
120000
002100
001210
000121
000011
)1(
2
L
K
K
LLLLLLL
K
K
K
K
L
K
K
LLLLLLL
K
K
K
K
n
lJ
l
GIn
n
t
6~~ 2
n
(4.70)
Rezultă că:
2)1(32~
lJ
GIn t
n12~
n (4.71)
Soluţia analitică are expresia (4.50) în care ni n şi eroarea ultimei pulsaţii proprii va fi:
%27,1010032
100)1(
)1(32)1(100
~% 11
21
1
121(1
)
)~~
n
nn
n
nn
n
(4.72)
În concluzie eroarea nn a ultimei pulsaţii proprii a sistemului dinamic este
egală cu eroarea 22 a ultimei pulsaţii proprii a unui singur element finit. Proprietatea s-a demonstrat pentru orice număr n par. Dacă n este impar, vectorul propriu n}
~{ n}
~ din relaţia (4.70) are în ultima
poziţie valoarea 1 şi egalitatea (4.70) rămâne valabilă. 4.5. VIBRAŢII TRANSVERSALE
4.5.1. Soluţia analitică Bara de secţiune constantă este reprezentată în figura 4.20. Modulul de elasticitate longitudinal este E, momentul de inerţie al secţiunii I şi masa pe unitatea de lungime μ. Se vor studia vibraţiile transversale în planul Oxy din figura 4.3, astfel încât momentul de inerţie al secţiunii va fi considerat în raport cu axa
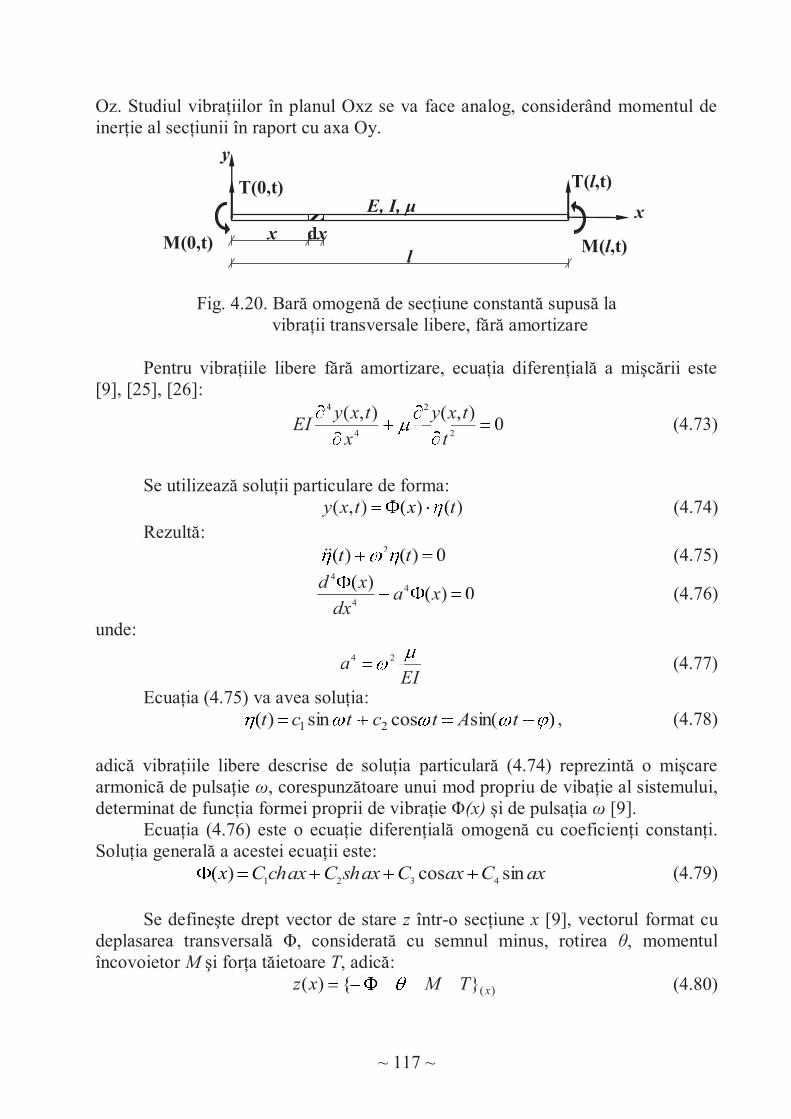
~ 117 ~
Oz. Studiul vibraţiilor în planul Oxz se va face analog, considerând momentul de inerţie al secţiunii în raport cu axa Oy.
Fig. 4.20. Bară omogenă de secţiune constantă supusă la
vibraţii transversale libere, fără amortizare Pentru vibraţiile libere fără amortizare, ecuaţia diferenţială a mişcării este [9], [25], [26]:
0),(),(
2
2
4
4
02
24
t
txy
x
txyEI (4.73)
Se utilizează soluţii particulare de forma:
)()(),( txtxy (t)(x (4.74) Rezultă:
0)()( 2 0tt (t22(t&& (4.75)
0)()( 4
4
4
0)()(
xadx
xd (4.76)
unde:
EIa
E
24 (4.77)
Ecuaţia (4.75) va avea soluţia: )sin(cossin)( 21 )s( tAtctct , (4.78)
adică vibraţiile libere descrise de soluţia particulară (4.74) reprezintă o mişcare armonică de pulsaţie ω, corespunzătoare unui mod propriu de vibaţie al sistemului, determinat de funcţia formei proprii de vibraţie Φ(x) şi de pulsaţia ω [9]. Ecuaţia (4.76) este o ecuaţie diferenţială omogenă cu coeficienţi constanţi. Soluţia generală a acestei ecuaţii este:
axCaxCaxshCaxchCx sincos)( 4321 CCCCx)( (4.79)
Se defineşte drept vector de stare z într-o secţiune x [9], vectorul format cu deplasarea transversală Φ, considerată cu semnul minus, rotirea θ, momentul încovoietor M şi forţa tăietoare T, adică:
)(}{)( xTMxz { (4.80)
y
M(0,t) M(l,t) x
x
dx
l
E, I, μ T(0,t) T(l,t)
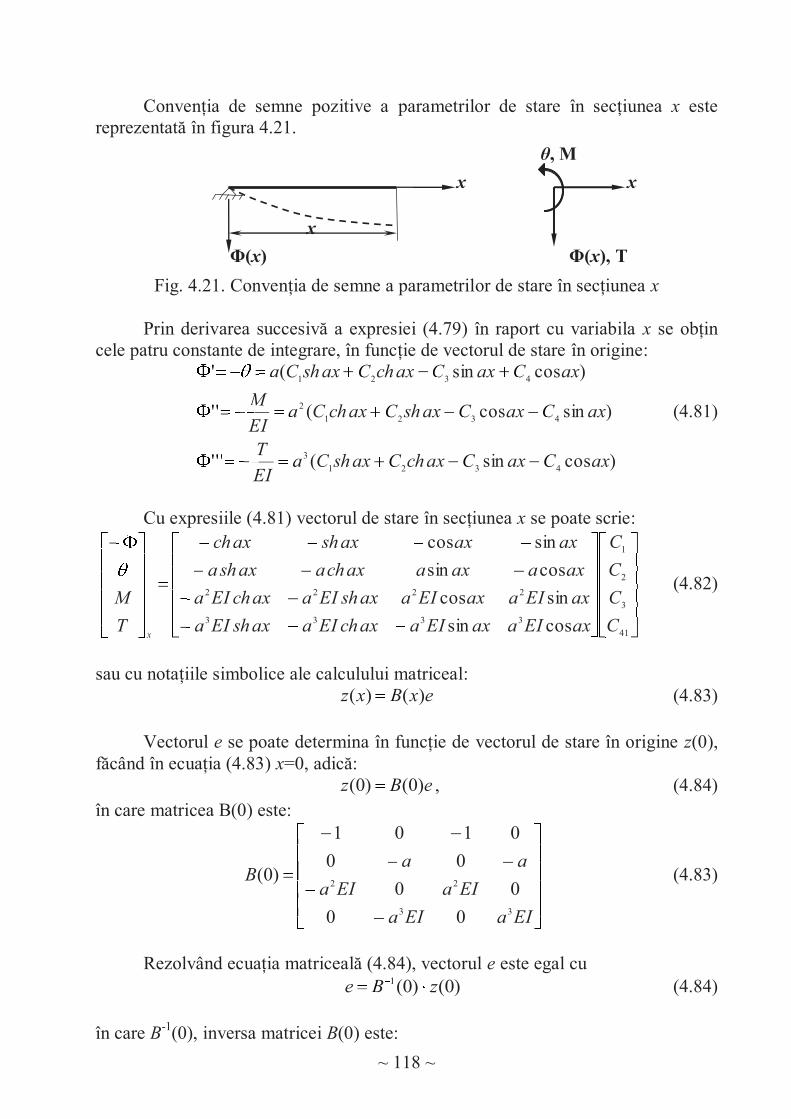
~ 118 ~
Convenţia de semne pozitive a parametrilor de stare în secţiunea x este reprezentată în figura 4.21.
Fig. 4.21. Convenţia de semne a parametrilor de stare în secţiunea x
Prin derivarea succesivă a expresiei (4.79) în raport cu variabila x se obţin cele patru constante de integrare, în funcţie de vectorul de stare în origine:
)cossin('''
)sincos(''
)cossin('
4321
3
4321
2
4321
axCaxCaxchCaxshCaEI
T
axCaxCaxshCaxchCaEI
M
axCaxCaxchCaxshCa
CCCaE
T'''
CCCaE
M''
CCCa'
(4.81)
Cu expresiile (4.81) vectorul de stare în secţiunea x se poate scrie:
41
3
2
1
3333
2222
cossin
sincos
cossin
sincos
C
C
C
C
axEIaaxEIaaxchEIaaxshEIa
axEIaaxEIaaxshEIaaxchEIa
axaaxaaxchaaxsha
axaxaxshaxch
T
M
x
(4.82)
sau cu notaţiile simbolice ale calculului matriceal:
exBxz )()( B (4.83)
Vectorul e se poate determina în funcţie de vectorul de stare în origine z(0), făcând în ecuaţia (4.83) x=0, adică:
eBz )0()0( B , (4.84) în care matricea B(0) este:
EIaEIa
EIaEIa
aaB
33
22
00
00
00
0101
)0( (4.83)
Rezolvând ecuaţia matriceală (4.84), vectorul e este egal cu
)0()0(1 zBe zB 1 (4.84) în care B-1(0), inversa matricei B(0) este:
x
x
Φ(x)
θ, M
Φ(x), T
x

~ 119 ~
EIaa
EIa
EIaa
EIa
B
3
2
3
2
1
2
10
2
10
02
10
2
12
10
2
10
02
10
2
1
)0( (4.85)
În acest fel, vectorul de stare în secţiunea x devine:
)0()()0()0()()( 1 zxUzBxBxz UB 1 (4.86)
Matricea U(x) se numeşte matrice de transfer şi are expresia:
)()()()(
)(1
)()()(
)(1
)(1
)()(
)(1
)(1
)(1
)(
)(
143
2
2
3
2143
2
32214
433221
axFaxaFaxEIFaaxEIFa
axFa
axFaxaEIFaxEIFa
axFEIa
axFaEI
axFaxaF
axFEIa
axFEIa
axFa
axF
xU (4.87)
În matricea (4.87) s-au notat:
)sin(2
1)()sin(
2
1)(
)cos(2
1)()cos(
2
1)(
42
31
axaxshaxFaxaxshaxF
axaxchaxFaxaxchaxF
s2
1s
2
1
c2
1c
2
1
(4.88)
Dacă se consideră o bară, şi notând capetele barei i-1şi i, vectorul de stare în
capătul i al barei se poate exprima în funcţie de vectorul de stare în capătul i-1 cu ajutorul matricei de transfer
)( alaxUUi
aU (4.89) sub forma:
11iiizUz (4.90)
Se consideră bara liberă din figura 4.20, pentru care vectorii de stare în secţiunile x=0 şi x=l sunt respectiv:
}00{
}00{ 000
lllz
z
l
0
l{0{
(4.91)
Cu relaţia (4.90) vectorul de stare zl se poate scrie:

~ 120 ~
0
0
)()()()(
)(1
)()()(
)(1
)(1
)()(
)(1
)(1
)(1
)(
0
00
0
143
2
2
3
2143
2
32214
433221
0
alFalaFalEIFaalEIFa
alFa
alFalaEIFalEIFa
alFEIa
alFaEI
alFalaF
alFEIa
alFEIa
alFa
alF
zl
l
l
(4.92)
Condiţiile de forţă tăietoare nulă (Tl =0) şi moment încovoietor nul (Ml =0) în capătul l al barei se exprimă din relaţia (4.92) astfel:
0)()(
0)()(
03
2
02
3
0403
2
00
00
) 0
) 0
alEIFaalEIFa
alaEIFalEIFa (4.93)
Când bara este deformată după un mod propriu de vibraţie, Φ0 şi θ0 sunt diferite de zero. Condiţia matematică ca sistemul de ecuaţii (4.93) să admită soluţii nebanale este ca determinantul sistemului să fie nul:
0)()(
)()(
3
2
2
3
43
2
0alEIFaalEIFa
alaEIFalEIFa (4.94)
sau, dezvoltând determinantul şi simplificând cu a4
E2I2:
0)()()( 42
2
3 0alFalFalF (4.95)
Înlocuind funcţiile din ecuaţia (4.95) cu expresiile lor din relaţiile (4.88), ecuaţia devine:
0)sin)(sin()cos( 2 0ss(c alalshalalshalalch (4.96) sau, efectuând calculele:
alalch
cos
1 (4.97)
Ecuaţia (4.97) admite o infinitate de soluţii aj, unde, din relaţia (4.77):
,...4,3,2,4
2
24 jEI
aj
j
2
j (4.98)
Relaţia (4.98) indică faptul că un sistem cu masa distribuită continuu are o infinitate de moduri de vibraţie. Rezolvând ecuaţia trigonometrică (4.97) se obţin rădăcinile:
,...4,3,2,2
)12( 21( jl
jaj (4.99)

~ 121 ~
,...4,3,2,2
)12(4
2
22
(((( 1 jl
EIj
j 4lj
(4.100)
Funcţia formelor proprii de vibraţie se determină corespunzător rădăcinilor aj ale ecuaţiei (4.97). Aceasta este, pentru bara liberă la capete:
)sin(sin
cos)cos()( xaxash
lalash
lalachxaxachx
jj
jj
jj
jjs
s
ccc()(x (4.101)
4.5.2. Soluţia cu elemente finite cu matricea maselor „consecventă”
În figura 4.22.a bara uniformă ce vibrează transversal este modelată cu un element finit având patru grade de libertate dinamică. Pentru determinarea matricei de rigiditate s-au utilizat funcţiile de formă )(1 xf , )(2 xf , )(3 xf şi )(4 xf din figura 4.22.b. Aceasta este:
22
22
3
4626
612612
2646
612612
][
llll
ll
llll
ll
l
EIK (4.102)
Pentru determinarea matricei maselor se utilizează aceleaşi funcţii de formă
)(1 xf , )(2 xf , )(3 xf şi )(4 xf din figura 4.22.b. Aceasta rezultă:
22
22
422313
221561354
313422
135422156
420][
llll
ll
llll
ll
lM
l (4.103)
unde μ este masa pe unitatea de lungime. Rezultă următoarele pulsaţii proprii de vibraţie:
444321 65,91,83,26,0,0l
EI
l
EI4l
44l321 9200 (4.104)
Soluţia analitică pentru 44 este 4
67,61l
EI4l
astfel că eroarea 44 va fi:
%6,4810067,61
65,9167,61100%
,4
,4,44 41
961
analitic
calculanalitic
,4 an
,4 ca,4 an
4 (4.105)
Al patrulea mod de vibraţie este prezentat în figura 4.22.c.
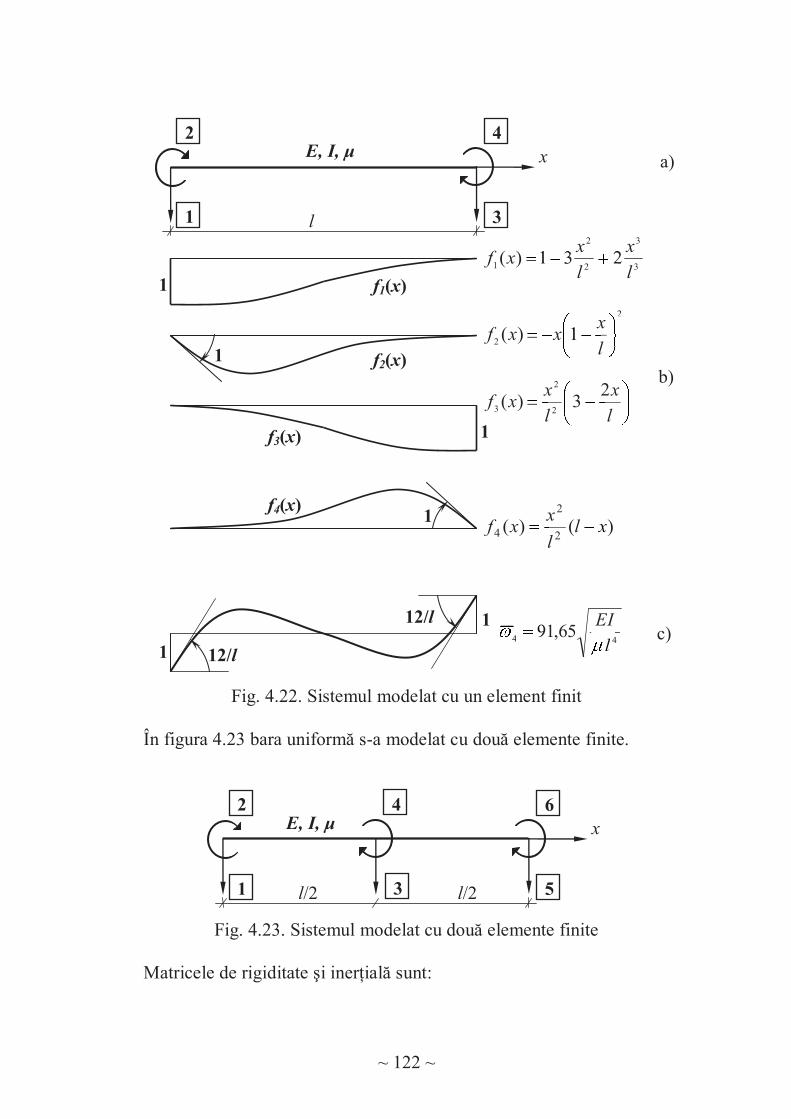
~ 122 ~
Fig. 4.22. Sistemul modelat cu un element finit
În figura 4.23 bara uniformă s-a modelat cu două elemente finite.
Fig. 4.23. Sistemul modelat cu două elemente finite
Matricele de rigiditate şi inerţială sunt:
1
2 E, I, μ
l/2
x
5
6 4
3 l/2
1
2 E, I, μ
l
a) x
3
4
f1(x)
f2(x)
f3(x)
1
1
1 3
3
2
2
1 231)(l
x
l
xxf 231
f4(x) 1
)()(2
2
4 xll
xxf x
l
x
2
2 1)(2
111l
xxxf
l
x
l
xxf
23)(
2
2
3 b)
1
1
12/l
12/l
c) 44 65,91l
EI4l
4 9
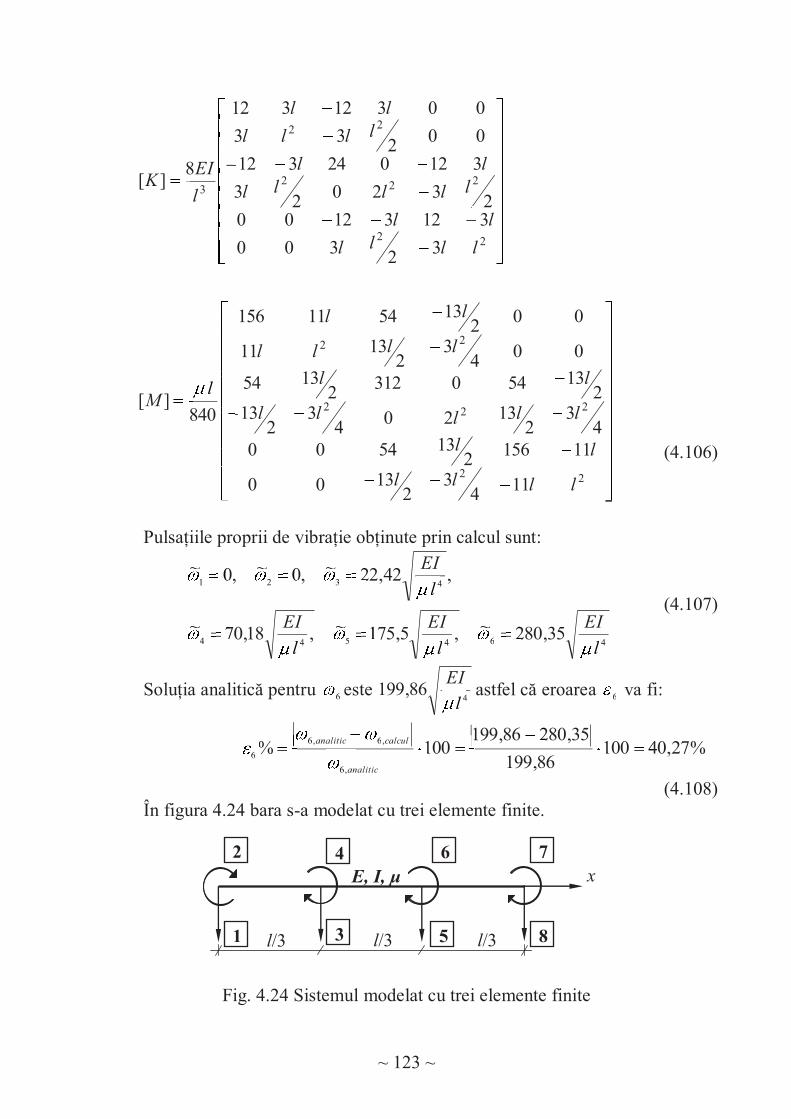
~ 123 ~
22
222
22
22
222
22
3
1143
21300
111562135400
43
213204
32
132
1354031221354
0043
21311
002135411156
840][
32300
31231200232023
312024312
00233
00312312
8][
llll
ll
lllll
ll
llll
ll
lM
llll
ll
lllll
ll
llll
ll
l
EIK
l
(4.106)
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
464544
4321
35,280~,5,175~,18,70~
,42,22~,0~,0~
l
EI
l
EI
l
EI
l
EI
4l6
~4l
5~
4l4
~
4l3
~2
~1
~
217
200
(4.107)
Soluţia analitică pentru 66 este 4
86,199l
EI4l
astfel că eroarea 66 va fi:
%27,4010086,199
35,28086,199100%
,6
,6,6
6 4121
1analitic
calculanalitic
,6 ana
,6 cal,6 ana
6
(4.108) În figura 4.24 bara s-a modelat cu trei elemente finite.
Fig. 4.24 Sistemul modelat cu trei elemente finite
1
2
E, I, μ
l/3
x
5
6 4
3 l/3
7
8 l/3
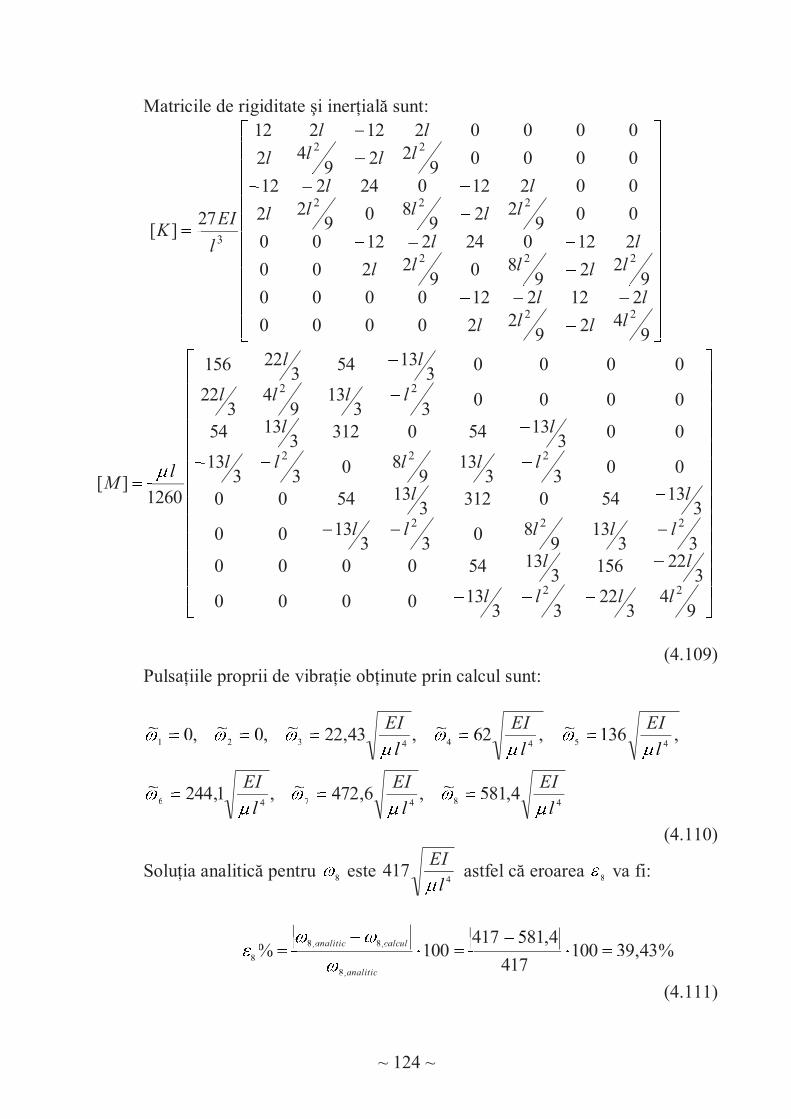
~ 124 ~
Matricile de rigiditate şi inerţială sunt:
9429
220000
21221200009
229809
2200
21202421200
009229
80922
00212024212
00009229
42
0000212212
27][
22
222
222
22
3
llll
ll
lllll
ll
lllll
ll
llll
ll
l
EIK
94
322
33130000
3221563
1354000033
139
80331300
3135403123
135400
003313
98033
13
003135403123
1354
00003313
94
322
0000313543
22156
1260][
22
222
222
22
llll
ll
lllll
ll
lllll
ll
llll
ll
lM
l
(4.109)
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
484746
45444321
4,581~,6,472~,1,244~
,136~,62~,43,22~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l8
~4l
7~
4l6
~
4l5
~4l
4~
4l3
~2
~1
~
542
16200
(4.110)
Soluţia analitică pentru 88 este 4
417l
EI4l
astfel că eroarea 88 va fi:
%43,39100417
4,581417100%
,8
,8,8
8 3154
1analitic
calculanalitic
,8 ana
,8 cal,8 ana%8
(4.111)
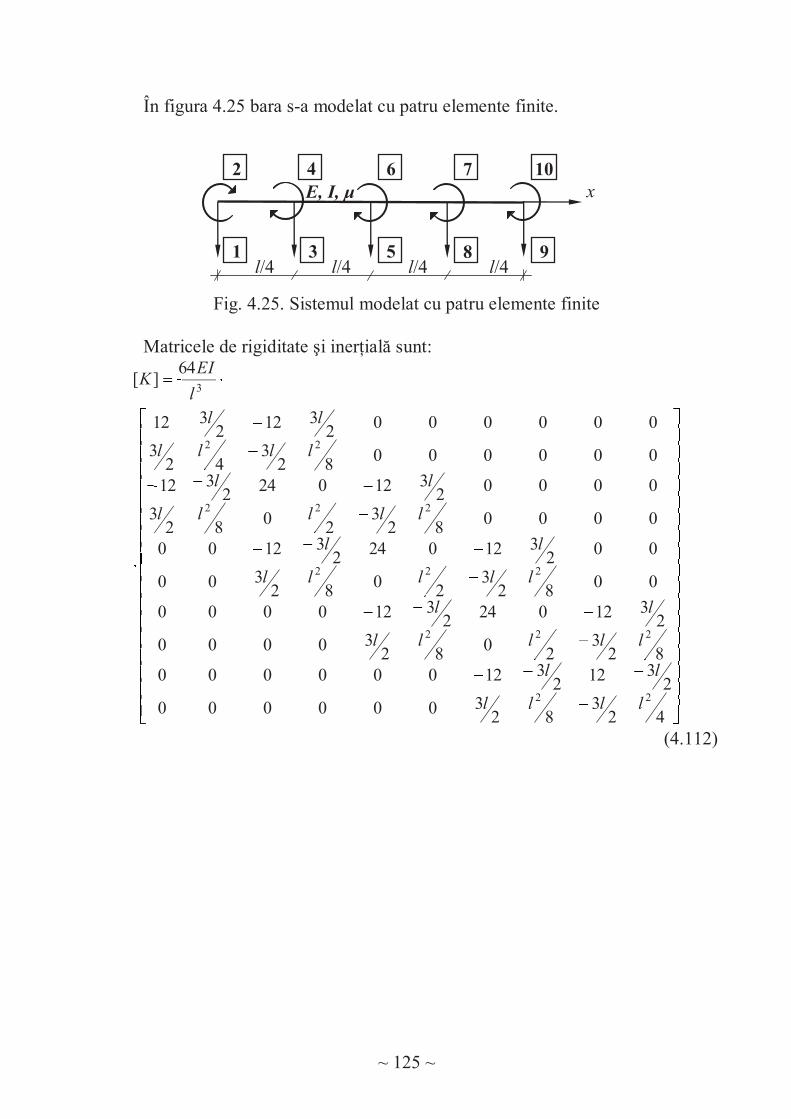
~ 125 ~
În figura 4.25 bara s-a modelat cu patru elemente finite.
Fig. 4.25. Sistemul modelat cu patru elemente finite
Matricele de rigiditate şi inerţială sunt:
423
823000000
23122
31200000082
32082
300002
31202423120000
00823
2082300
0023120242
31200
0000823
20823
000023120242
312
000000823
423
00000023122
312
64][
22
222
222
222
22
3
llll
ll
lllll
ll
lllll
ll
lllll
ll
llll
ll
l
EIK
(4.112)
1
2
E, I, μ
l/4
x
5
6 4
3 l/4
7
8 l/4 l/4
10
9

~ 126 ~
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
4104948
474645
444321
9,996~,903~,2,542~
,7,349~,3,223~,9,121~
,62~,4,22~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l10
~4l
9~
4l8
~
4l7
~4l
6~
4l5
~
4l4
~4l
3~
2~
1~
995
321
6200
(4.113)
Soluţia analitică pentru 1010 este 4
1,713l
EI4l
astfel că eroarea 1010 va fi:
%8,391001,713
9,9961,713100%
,10
,10,10
10 3197
1analitic
calculanalitic
,10 an
,10 ca,10 an
10 (4.114)
În figura 4.26 bara s-a modelat cu cinci elemente finite.
4211
163
413000000
2111564
135400000016
34
132016
34
1300004
13540312413540000
00163
413
20163
41300
004135403124
135400
0000163
413
20163
413
00004135403124
1354
000000163
413
4211
000000413542
11156
1680][
22
222
222
222
22
llll
ll
lllll
ll
lllll
ll
lllll
ll
llll
ll
lM
l
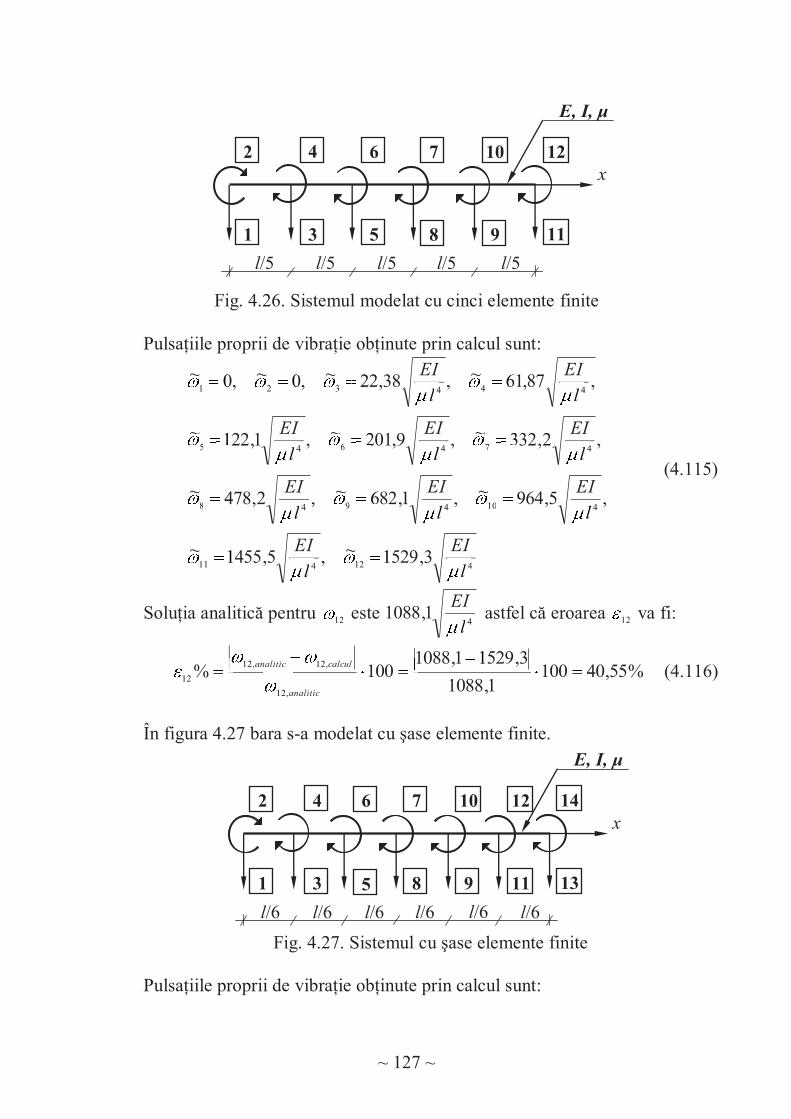
~ 127 ~
Fig. 4.26. Sistemul modelat cu cinci elemente finite
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
412411
4104948
474645
444321
3,1529~,5,1455~
,5,964~,1,682~,2,478~
,2,332~,9,201~,1,122~
,87,61~,38,22~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l12
~4l
11~
4l10
~4l
9~
4l8
~
4l7
~4l
6~
4l5
~
4l4
~4l
3~
2~
1~
11
964
321
6200
(4.115)
Soluţia analitică pentru 1212 este 4
1,1088l
EI4l
astfel că eroarea 1212 va fi:
%55,401001,1088
3,15291,1088100%
,12
,12,12
12 4111
1analitic
calculanalitic
,12 an
,12 ca,12 an
12 (4.116)
În figura 4.27 bara s-a modelat cu şase elemente finite.
Fig. 4.27. Sistemul cu şase elemente finite
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
1
2
l/6
x
5
64
3
l/6
7
8
l/6 l/6
10
9
12
11
l/6
E, I, μ
13
14
l/6
1
2
l/5
x
5
64
3
l/5
7
8
l/5 l/5
10
9
12
11
l/5
E, I, μ
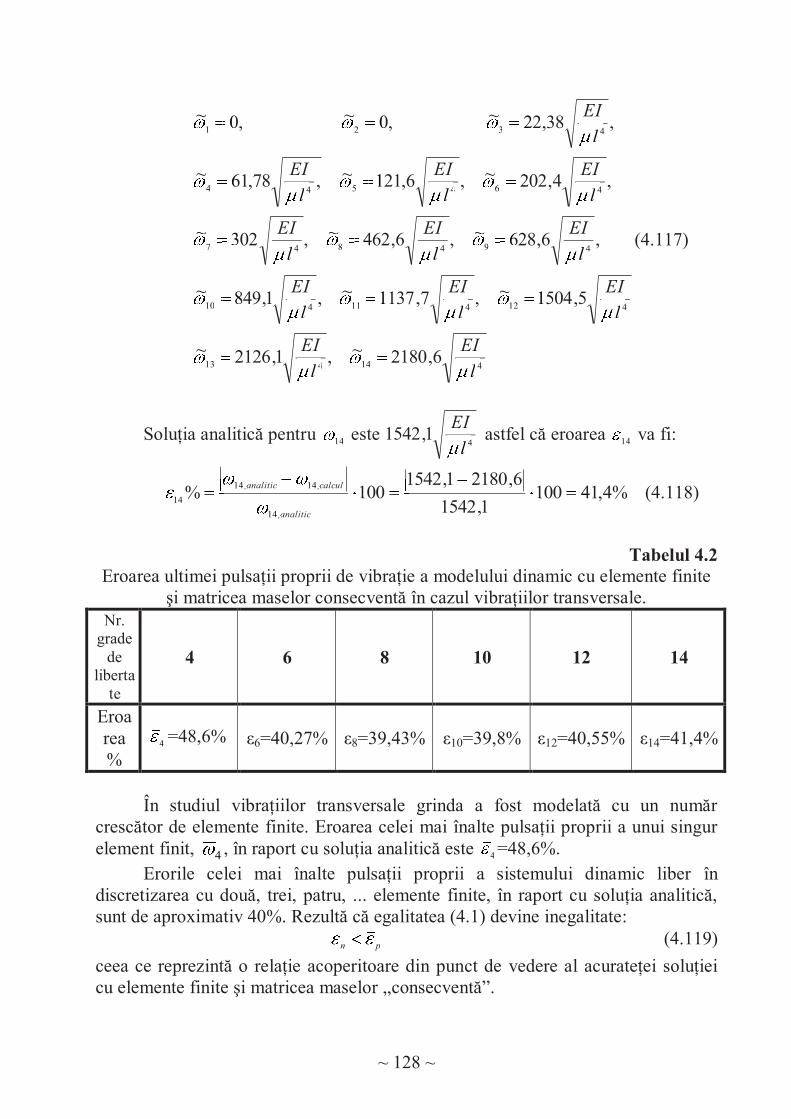
~ 128 ~
414413
412411410
494847
464544
4321
6,2180~,1,2126~
5,1504~,7,1137~,1,849~
,6,628~,6,462~,302~
,4,202~,6,121~,78,61~
,38,22~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l14
~4l
13~
4l12
~4l
11~
4l10
~
4l9
~4l
8~
4l7
~
4l6
~4l
5~
4l4
~
4l3
~2
~1
~
22
118
643
216
200
(4.117)
Soluţia analitică pentru 1414 este 4
1,1542l
EI4l
astfel că eroarea 1414 va fi:
%4,411001,1542
6,21801,1542100%
,14
,14,14
14 4121
1analitic
calculanalitic
,14 an
,14 ca,14 an
14 (4.118)
Tabelul 4.2
Eroarea ultimei pulsaţii proprii de vibraţie a modelului dinamic cu elemente finite şi matricea maselor consecventă în cazul vibraţiilor transversale.
Nr. grade
de liberta
te
4 6 8 10 12 14
Eroarea %
44 =48,6% ε6=40,27% ε8=39,43% ε10=39,8% ε12=40,55% ε14=41,4%
În studiul vibraţiilor transversale grinda a fost modelată cu un număr crescător de elemente finite. Eroarea celei mai înalte pulsaţii proprii a unui singur element finit, 44 , în raport cu soluţia analitică este 44 =48,6%. Erorile celei mai înalte pulsaţii proprii a sistemului dinamic liber în discretizarea cu două, trei, patru, ... elemente finite, în raport cu soluţia analitică, sunt de aproximativ 40%. Rezultă că egalitatea (4.1) devine inegalitate:
pn pn (4.119)
ceea ce reprezintă o relaţie acoperitoare din punct de vedere al acurateţei soluţiei cu elemente finite şi matricea maselor „consecventă”.
~ 129 ~
4.5.3. Soluţia cu elemente finite şi matricea maselor diagonală Matricea maselor „consecventă” se poate diagonaliza în felul următor [29]:
- se adună elementele de pe diagonala matricei maselor corespunzătoare gradelor de libertate de translaţie, suma notându-se cu α;
- se împart elementele diagonalei la α, înmulţindu-se totodată cu masa totală a elementului;
- tuturor elementelor nediagonale li se atribuie valoarea zero. Rezultă:
2
2
000
03900
000
00039
78][
l
llM
l (4.120)
unde μ este masa pe unitatea de lungime iar l este lungimea elementului. Se consideră bara uniformă din figura 4.22.a, modelată cu un element finit având patru grade de libertate. Matricea de rigiditate este dată de relaţia (4.102). Matricea maselor diagonală va fi matricea dată de relaţia (4.120). Rezultă următoarele pulsaţii proprii de vibraţie:
444321 72,22,49,12,0,0l
EI
l
EI4l
44l321 2100 (4.121)
Soluţia analitică pentru 44 este 4
67,61l
EI4l
astfel că eroarea 44 va fi:
%17,6310067,61
72.2267,61100%
,4
,4,4
4 6126
1analitic
calculanalitic
,4 ana
,4 cal,4 ana
4 (4.122)
Se consideră bara modelată cu două elemente finite (figura 4.23). Matricea de rigiditate este dată de relaţia (4.106). Matricea maselor rezultă:
400000
0390000
0042000
0007800
000040
0000039
156][
2
2
2
l
l
l
lM
l (4.123)
~ 130 ~
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
464544
4321
72,88~,76,74~,96,49~
,10,13~,0~,0~
l
EI
l
EI
l
EI
l
EI
4l6
~4l
5~
4l4
~
4l3
~2
~1
~
874
100
(4.124)
Soluţia analitică pentru 66 este 4
86,199l
EI4l
astfel că eroarea 66 va fi:
%61,5510086,199
72,8886,199100%
,6
,6,6
6 5181
1analitic
calculanalitic
,6 ana
,6 cal,6 ana
6 (4.125)
Se consideră bara modelată cu trei elemente finite (figura 4.24). Matricea de
rigiditate este dată de relaţia (4.109). Matricea maselor rezultă:
90000000
039000000
009200000
000780000
000092000
000007800
00000090
000000039
234][
2
2
2
2
l
l
l
l
lM
l (4.126)
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
4847
464544
4321
1,198~,0,185~
,5,144~,4,112~,08,40~
,40,16~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l8
~4l
7~
4l6
~4l
5~
4l4
~
4l3
~2
~1
~
11
114
100
(4.127)
Soluţia analitică pentru 88 este 4
417l
EI4l
astfel că eroarea 88 va fi:
%49,52100417
1,198417100%
,8
,8,8
8 5114
1analitic
calculanalitic
,8 ana
,8 cal,8 ana%8 (4.128)
~ 131 ~
Se consideră bara modelată cu patru elemente finite (figura 4.25). Matricea de rigiditate este dată de relaţia (4.112). Matricea maselor rezultă:
16000000000
03900000000
0080000000
00078000000
0000800000
00000780000
0000008000
00000007800
00000000160
00000000039
312][
2
2
2
2
2
l
l
l
l
l
lM
l (4.129)
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
4104948
474645
444321
9,350~,9,338~,6,294~
,8,236~,8,199~,16,83~
,82,45~,38,18~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l10
~4l
9~
4l8
~
4l7
~4l
6~
4l5
~
4l4
~4l
3~
2~
1~
332
218
4100
(4.130)
Soluţia analitică pentru 1010 este 4
1,713l
EI4l
astfel că eroarea 1010 va fi:
%80,501001,713
9,3501,713100%
,10
,10,10
10 5137
1analitic
calculanalitic
,10 an
,10 ca,10 an
10 (4.131)
Se consideră bara modelată cu cinci elemente finite (figura 4.26). Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
412411
4104948
474645
444321
1,547~,2,536~
,0,490~,2,424~,58,352~
,2,312~,6,141~,79,91~
,82,49~,58,19~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l12
~4l
11~
4l10
~4l
9~
4l8
~
4l7
~4l
6~
4l5
~
4l4
~4l
3~
2~
1~
55
443
319
4100
(4,132)
~ 132 ~
Soluţia analitică pentru 1212 este 4
1,1088l
EI4l
astfel că eroarea 1212 va fi:
%72,491001,1088
1,5471,1088100%
,12
,12,12
12 4151
1analitic
calculanalitic
,12 an
,12 ca,12 an
12 (4.133)
Se consideră bara modelată cu şase elemente finite (figura 4.27). Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
414413
412411410
494847
464544
4321
7,786~,8,776~
4,729~,8,659~,4,575~
,4,492~,6,449~,1,215~
,2,154~,86,97~,64,52~
,33,20~,0~,0~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l14
~4l
13~
4l12
~4l
11~
4l10
~
4l9
~4l
8~
4l7
~
4l6
~4l
5~
4l4
~
4l3
~2
~1
~
77
765
442
195
200
(4.134)
Soluţia analitică pentru 1414 este 4
1,1542l
EI4l
astfel că eroarea 1414 va fi:
%99,481001,1542
7,7861,1542100%
,14
,14,14
14 4171
1analitic
calculanalitic
,14 an
,14 ca,14 an
14 (4.135)
Tabelul 4.3
Eroarea ultimei pulsaţii proprii de vibraţie a modelului dinamic cu elemente finite şi matricea maselor diagonală în cazul vibraţiilor transversale.
Nr. grade de libertate
4 6 8 10 12 14
Eroarea %
44 =63,17% ε6=55,61% ε8=52,49% ε10=50,8% ε12=49,72% ε14=48,99%
În studiul vibraţiilor transversale grinda a fost modelată cu un număr
crescător de elemente finite. Eroarea celei mai înalte pulsaţii proprii a unui singur element finit, 44 , în raport cu soluţia analitică este 44 =63,17%.
~ 133 ~
Erorile celei mai înalte pulsaţii proprii a sistemului dinamic liber în discretizarea cu două, trei, patru, ... elemente finite, în raport cu soluţia analitică, sunt de aproximativ 50%. Rezultă că egalitatea (4.1) devine inegalitate:
pn pn (4.136)
ceea ce reprezintă o relaţie acoperitoare din punct de vedere al acurateţei soluţiei cu elemente finite şi matricea maselor diagonală.
~ 134 ~
CAPITOLUL 5
ABORDAREA PRACTICĂ A PROBLEMEI MODELĂRII SISTEMELOR DINAMICE STRUCTURALE
5.1. ASPECTE FUNDAMENTALE
5.1.1. Introducere
În capitolul 4 s-au analizat vibraţiile proprii ale sistemelor dinamice libere şi anume:
- vibraţii longitudinale cu mase concentrate; - vibraţii longitudinale cu matricea maselor „consecventă”; - vibraţii de torsiune cu caracteristici inerţiale concentrate; - vibraţii de torsiune cu matricea inerţială „consecventă”; - vibraţii transversale cu matricea maselor „consecventă”; - vibraţii transversale cu matricea maselor diagonală.
În toate aceste tipuri de vibraţii proprii, soluţia obţinută prin modelarea cu
elemente finite a fost comparată cu soluţia analitică. S-a obţinut legătura dintre eroarea sistemului dinamic şi eroarea unui singur element finit. Această legătură este valabilă pentru sistemul dinamic liber.
Însă, sistemele dinamice structurale ale construcţiilor sunt sisteme cu legături. Rezultă că o abordare practică a problemei modelării sistemelor dinamice structurale trebuie să se refere la vibraţiile sistemelor cu legături.
5.1.2. Aspecte analizate în abordarea practică a modelării sistemelor dinamice structurale
Se analizează următoarele vibraţii ale sistemelor cu legături: - vibraţii longitudinale, soluţia cu elemente finite şi mase concentrate; - vibraţii longitudinale, soluţia cu elemente finite şi matricea maselor
„consecventă”; - vibraţii transversale , soluţia cu elemente finite şi mase concentrate; - vibraţii transversale, soluţia cu elemente finite şi matricea maselor
„consecventă”.
Nu s-au analizat separat vibraţiile la torsiune, deoarece există o analogie perfectă între acestea şi vibraţiile longitudinale.
De asemenea, în acest capitol sunt studiate următoarele probleme practice: evaluarea erorilor pulsaţiilor proprii intermediare ale sistemelor cu
legături, utilizând diferite metode (metoda polinoamelor de interpolare Lagrange, procedeul funcţiei putere etc.);

~ 135 ~
influenţa erorilor pulsaţiilor proprii asupra acurateţei răspunsului dinamic la acţiuni armonice.
5.2. VIBRAŢIILE LONGITUDINALE ALE SISTEMULUI CU LEGĂTURI
5.2.1. Soluţia analitică
Se va analiza bara de secţiune constantă, fixată la un capăt (figura 5.1). Modulul de elasticitate longitudinal este E, aria secţiunii transversale A şi masa pe unitatea de lungime μ. Pentru vibraţiile libere fără amortizare, ecuaţia diferenţială a mişcării este [13]:
02
2
2
2
02
22
t
)t,x(u
x
)t,x(uEA (5.1)
unde ),( txu este deplasarea pe direcţia axială.
Fig. 5.1. Bară de secţiune constantă cu vibraţii axiale
Soluţia pentru forma proprie este dată de relaţia (4.8): cxsinCcxcosC)x( 21 CCx(
Cele două condiţii limită de satisfăcut sunt:
.)l(N,)( 000 00( 0 (5.2) Rezultă:
K,,,,lc
clcos
i 2
7
2
5
2
3
2
0
53
2
0 (5.3)
Pulsaţiile proprii ale sistemului sunt:
2212
l
EA)i(
EAcii 2l
i 1(c (5.4)
x
x,u
dx
l
E,A,μ
~ 136 ~
5.2.2. Soluţia cu elemente finite şi mase concentrate
Acest caz este abordat şi în referinţa bibliografică [34].
Se consideră sistemul discretizat în zece elemente finite de aceeaşi lungime. Rezultă matricea de rigiditate:
1100000000
1210000000
0121000000
0012100000
0001210000
0000121000
0000012100
0000001210
0000000121
0000000012
10][
l
EAK (5.5)
şi matricea maselor:
1000000000
0200000000
0020000000
0002000000
0000200000
0000020000
0000002000
0000000200
0000000020
0000000002
20][
lM
l (5.6)
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:

~ 137 ~
210
292827
262524
232221
938,19~
,45,19~,48,18~,05,17~
,21,15~,99,12~,45,10~
,654,7~,669,4~,569,1~
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
2l10
~
2l9
~2l
8~
2l7
~
2l6
~2l
5~
2l4
~
2l3
~2l
2~
2l1
~
1
111
111
741
(5.7)
Soluţia analitică pentru 1010 este 2
84529l
EA,
2l astfel că eroarea 1010 va fi:
%,,
,,%
analitic,
calcul,analitic, 193310084529
9381984529100
10
101010 31
121
a,10
c,10a,1010 (5.8)
Eroarea celei mai înalte pulsaţii proprii a unui singur element liber cu mase concentrate este
%,p 34362 32p .
Rezultă că în cazul sistemului cu legături şi cu mase concentrate, eroarea %,n 193310 310n
este mai mică decât eroarea unui singur element liber:
pn pn (5.9)
5.2.3. Soluţia cu elemente finite şi matricea maselor „consecventă”
Se consideră sistemul discretizat în zece elemente de aceeaşi lungime. Matricea de rigiditate rămâne neschimbată, adică este cea precizată în relaţia (5.5). Utilizând matricea (4.32) a unui singur element, rezultă următoarea matrice „consecventă” a maselor:
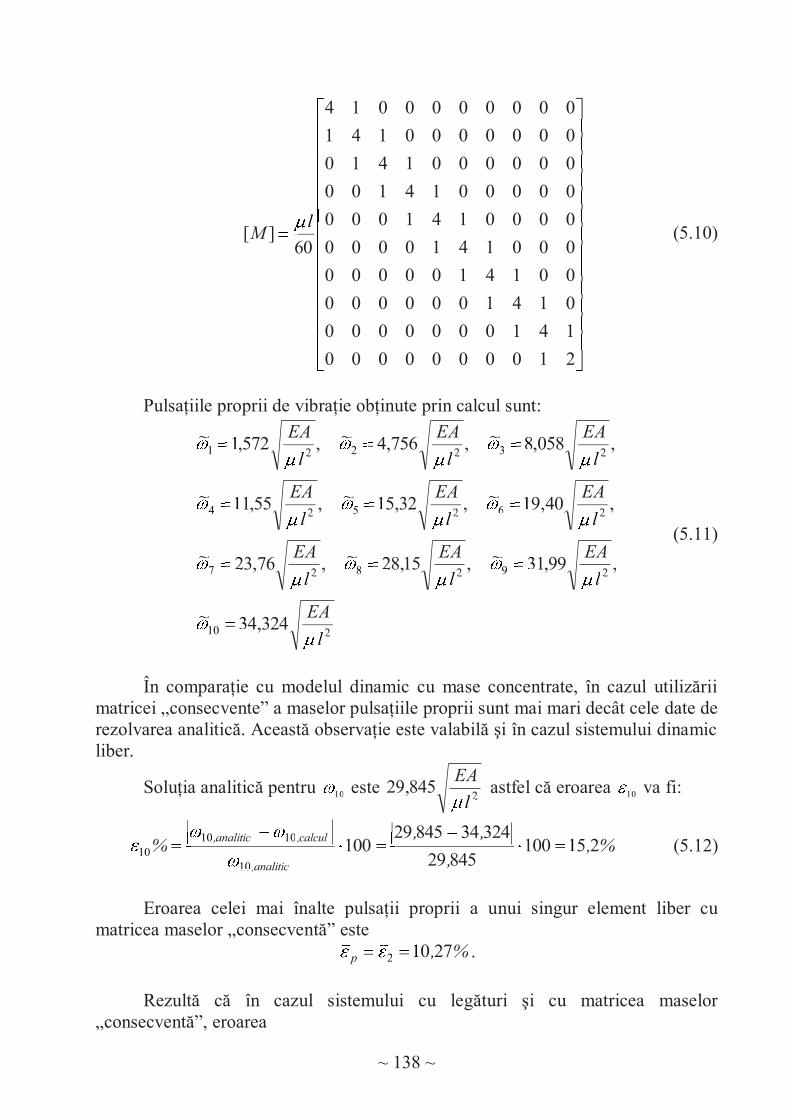
~ 138 ~
2100000000
1410000000
0141000000
0014100000
0001410000
0000141000
0000014100
0000001410
0000000141
0000000014
60][
lM
l (5.10)
Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
210
292827
262524
232221
324,34~
,99,31~,15,28~,76,23~
,40,19~,32,15~,55,11~
,058,8~,756,4~,572,1~
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
l
EA
2l10
~
2l9
~2l
8~
2l7
~
2l6
~2l
5~
2l4
~
2l3
~2l
2~
2l1
~
3
322
111
841
(5.11)
În comparaţie cu modelul dinamic cu mase concentrate, în cazul utilizării
matricei „consecvente” a maselor pulsaţiile proprii sunt mai mari decât cele date de rezolvarea analitică. Această observaţie este valabilă şi în cazul sistemului dinamic liber.
Soluţia analitică pentru 1010 este 2
845,29l
EA2l
astfel că eroarea 1010 va fi:
%,,
,,%
analitic,
calcul,analitic, 21510084529
3243484529100
10
101010 11
321
a,10
c,10a,1010 (5.12)
Eroarea celei mai înalte pulsaţii proprii a unui singur element liber cu matricea maselor „consecventă” este
%,p 27102 12p .
Rezultă că în cazul sistemului cu legături şi cu matricea maselor „consecventă”, eroarea

~ 139 ~
%,n 21510 110n este mai mare decât eroarea unui singur element liber. 5.3. VIBRAŢIILE TRANSVERSALE ALE SISTEMULUI CU LEGĂTURI
5.3.1. Soluţia analitică
Se va analiza bara de secţiune constantă, fixată la un capăt. Modulul de elasticitate longitudinal este E, momentul de inerţie al secţiunii transversale I şi masa pe unitatea de lungime μ.
Fig. 5.2. Bară de secţiune constantă cu vibraţii transversale
În paragraful 4.5.1. se prezintă ecuaţia diferenţială a mişcării (4.73). Pentru
bara fixată la un capăt vectorii de stare în secţiunile x=0 şi x=l sunt respectiv:
}00{
}00{ 000
lllz
TMz
ll{
{ (5.13)
Folosind relaţia (4.90), vectorul de stare zl se va scrie:
0
0
1432
23
21432
32214
433221
0
0
1
11
111
0
0
T
M
)al(F)al(aF)al(EIFa)al(EIFa
)al(Fa
)al(F)al(aEIF)al(EIFa
)al(FEIa
)al(FaEI
)al(F)al(aF
)al(FEIa
)al(FEIa
)al(Fa
)al(F
zl
l
l
l (5.14)
Condiţiile de forţă tăietoare nulă (Tl =0) şi moment încovoietor nul (Ml =0) în capătul l al barei se exprimă din relaţia (5.14) astfel:
0
01
0104
0201
0
01
T)al(FM)al(aF
T)al(Fa
M)al(F (5.15)
Când bara este deformată după un mod transversal de vibraţie, M0 şi T0 sunt diferite de zero. Condiţia matematică ca sistemul de ecuaţii (5.15) să admită soluţii nebanale este ca determinantul sistemului să fie nul:
x
y
M(0,t)
θ(0,t)
M(l,t)
θ(l,t)
x dx
l
E, I, μ
T(0,t)
Φ(0,t) T(l,t)
Φ(l,t)
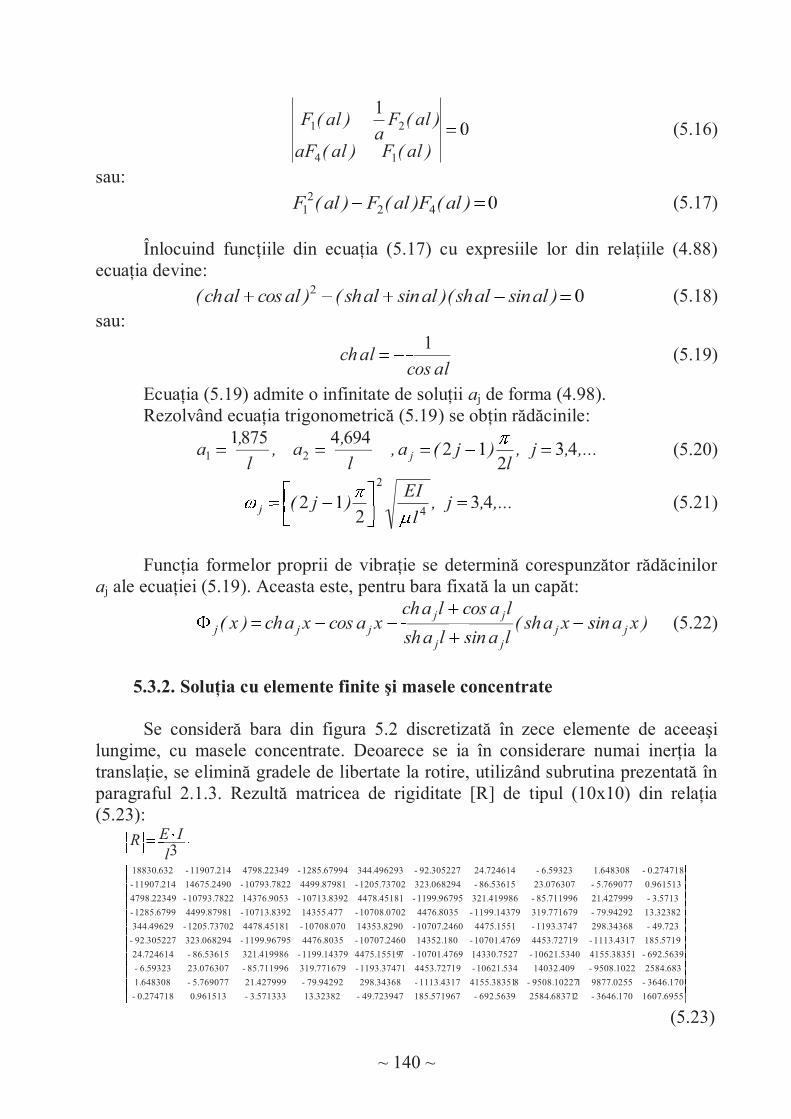
~ 140 ~
01
14
21 0)al(F)al(aF
)al(Fa
)al(F (5.16)
sau:
0422
1 0)al(F)al(F)al(F (5.17)
Înlocuind funcţiile din ecuaţia (5.17) cu expresiile lor din relaţiile (4.88) ecuaţia devine:
02 0)alsinalsh)(alsinalsh()alcosalch( (5.18) sau:
alcosalch
1 (5.19)
Ecuaţia (5.19) admite o infinitate de soluţii aj de forma (4.98). Rezolvând ecuaţia trigonometrică (5.19) se obţin rădăcinile:
,...,j,l
)j(a,l
,a,
l
,a j 43
212
6944875121 31(
41 (5.20)
,...,j,l
EI)j(j 43
212
4
2
32
(((( 1l 4j (5.21)
Funcţia formelor proprii de vibraţie se determină corespunzător rădăcinilor
aj ale ecuaţiei (5.19). Aceasta este, pentru bara fixată la un capăt:
)xasinxash(lasinlash
lacoslachxacosxach)x( jj
jj
jj
jjj ss
cccc(j (5.22)
5.3.2. Soluţia cu elemente finite şi masele concentrate
Se consideră bara din figura 5.2 discretizată în zece elemente de aceeaşi lungime, cu masele concentrate. Deoarece se ia în considerare numai inerţia la translaţie, se elimină gradele de libertate la rotire, utilizând subrutina prezentată în paragraful 2.1.3. Rezultă matricea de rigiditate [R] de tipul (10x10) din relaţia (5.23):
1607.69553646.170-22584.68371692.5639-185.57196749.723947-13.323823.571333-0.9615130.274718-
3646.170-9877.025519508.10227-84155.383511113.4317-298.3436879.94292-21.4279995.769077-1.648308
2584.6839508.1022-14032.40910621.534-4453.727191193.37471-319.77167985.711996-23.0763076.59323-
692.5639-4155.3835110621.5340-14330.752710701.4769-74475.155191199.14379-321.41998686.53615-24.724614
185.57191113.4317-4453.7271910701.4769-14352.18010707.2460-4476.80351199.96795-323.06829492.305227-
49.723-298.343681193.3747-4475.155110707.2460-14353.829010708.070-4478.451811205.73702-344.49629
13.3238279.94292-319.7716791199.14379-4476.803510708.0702-14355.47710713.8392-4499.879811285.6799-
3.5713-21.42799985.711996-321.4199861199.96795-4478.4518110713.8392-14376.905310793.7822-4798.22349
0.9615135.769077-23.07630786.53615-323.0682941205.73702-4499.8798110793.7822-14675.249011907.214-
0.274718-1.6483086.59323-24.72461492.305227-344.4962931285.67994-4798.2234911907.214-18830.632
3lIER
(5.23)

~ 141 ~
Toate masele concentrate au aceeaşi valoare, cu excepţia celei din capătul consolei, care are valoarea pe jumătate. Matricea maselor [M] este o matrice diagonală. Matricea [M]-1[R] este proporţională cu matricea [R] din relaţia (5.23) cu excepţia ultimei linii. Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:
407,66710
~
417,5959
~4
05,4948~
444,3847
~
487,2806
~4
59,1905~
459,1164
~
4124,603
~4
690,212~
4500031
~
lμ
EIω
,lμ
EIω,
lμ
EIω,
lμ
EIω
,lμ
EIω,
lμ
EIω,
lμ
EIω
,lμ
EIω,
lμ
EIω,
lμ
EI,ω
6
543
211
623
(5.24)
În cazul sistemelor cu legături, utilizarea maselor concentrate conduce la
pulsaţii proprii mai mici decât cele date de rezolvarea analitică.
Soluţia analitică pentru 1010 este 4
73,890l
EI
4l astfel că eroarea 1010 va fi:
%,,
,,
ω
ωω%ε
,analitic
,calcul,analitic 112510073890
0766773890100
10
101010 21
681
ωω (5.26)
5.3.3. Soluţia cu elemente finite şi matricea maselor „consecventă”
Se consideră bara din figura 5.2 discretizată în zece elemente de aceeaşi lungime, utilizând matricea maselor „consecventă”. Pulsaţiile proprii de vibraţie obţinute prin calcul sunt:

~ 142 ~
(5.27)
Şi în cazul sistemelor cu legături, folosirea matricei maselor consecventă conduce la pulsaţii proprii mai mari decât cele date de rezolvarea analitică.
Soluţia analitică pentru 2020 este 4
93752l
EI,
4l astfel că eroarea 2020 va fi:
%,,
,,
ω
ωω%ε
,analitic
,calcul,analitic 65910093752
8598793752100
20
202020 51
531
ωω (5.28)
Eroarea celei mai înalte pulsaţii proprii a unui singur element liber cu matricea maselor consecventă este
%6,482 42p .
Rezultă că în cazul sistemului cu legături şi cu matricea maselor consecventă, eroarea
%6,5920 520n este mai mare decât eroarea unui singur element liber.
420419
418417416
415414413
212411410
494847
464544
434241
8,5987~,5,4784~
7,4248~,3,3639~,4,3066~
8,2563~,6,2133~,8,1767~
3,1458~,1,1207~,92,906~
,53,729~,22,564~,15,421~
,17,300~,36,200~,02,121~
,713,61~,035,22~,516,3~
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EA
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
4l20
~4l
19~
4l18
~4l
17~
4l16
~
4l15
~4l
14~
4l13
~
2l12
~4l
11~
4l10
~
4l9
~4l
8~
4l7
~
4l6
~4l
5~
4l4
~
4l3
~4l
2~
4l1
~
54
433
221
119
754
321
623
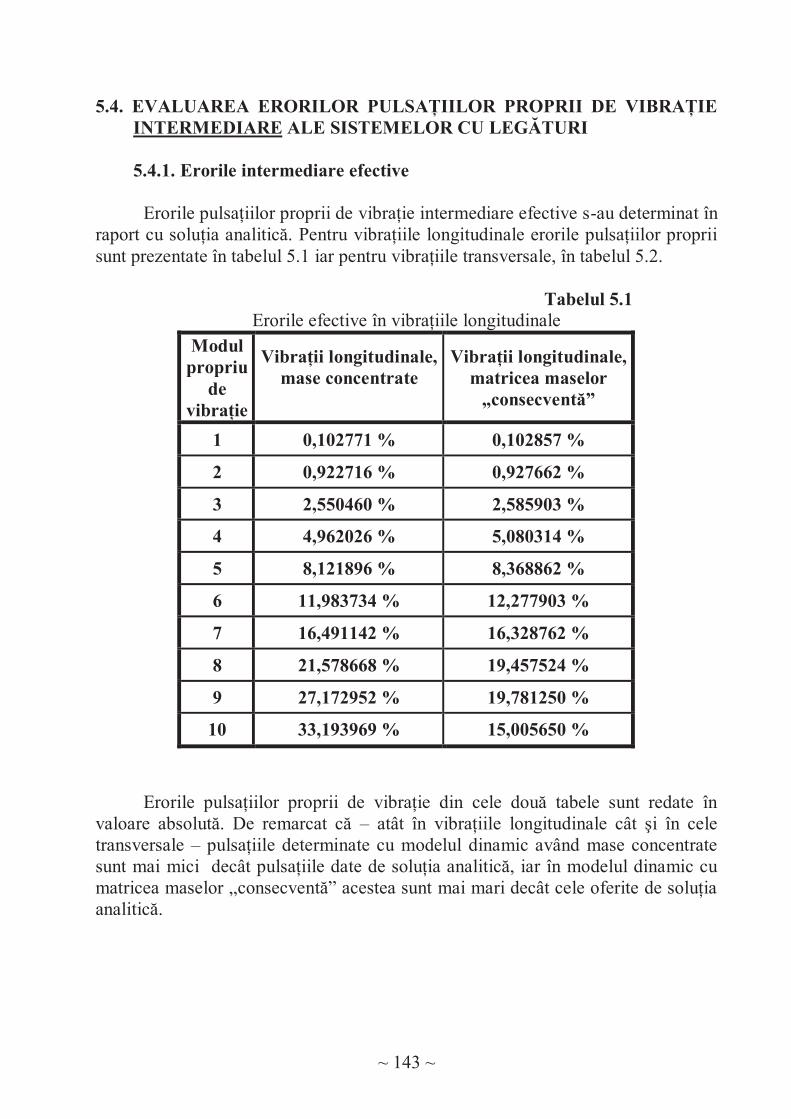
~ 143 ~
5.4. EVALUAREA ERORILOR PULSAŢIILOR PROPRII DE VIBRAŢIE INTERMEDIARE ALE SISTEMELOR CU LEGĂTURI
5.4.1. Erorile intermediare efective
Erorile pulsaţiilor proprii de vibraţie intermediare efective s-au determinat în raport cu soluţia analitică. Pentru vibraţiile longitudinale erorile pulsaţiilor proprii sunt prezentate în tabelul 5.1 iar pentru vibraţiile transversale, în tabelul 5.2.
Tabelul 5.1
Erorile efective în vibraţiile longitudinale Modul
propriu
de
vibraţie
Vibraţii longitudinale, mase concentrate
Vibraţii longitudinale, matricea maselor
„consecventă”
1 0,102771 % 0,102857 %
2 0,922716 % 0,927662 %
3 2,550460 % 2,585903 %
4 4,962026 % 5,080314 %
5 8,121896 % 8,368862 %
6 11,983734 % 12,277903 %
7 16,491142 % 16,328762 %
8 21,578668 % 19,457524 %
9 27,172952 % 19,781250 %
10 33,193969 % 15,005650 %
Erorile pulsaţiilor proprii de vibraţie din cele două tabele sunt redate în valoare absolută. De remarcat că – atât în vibraţiile longitudinale cât şi în cele transversale – pulsaţiile determinate cu modelul dinamic având mase concentrate sunt mai mici decât pulsaţiile date de soluţia analitică, iar în modelul dinamic cu matricea maselor „consecventă” acestea sunt mai mari decât cele oferite de soluţia analitică.
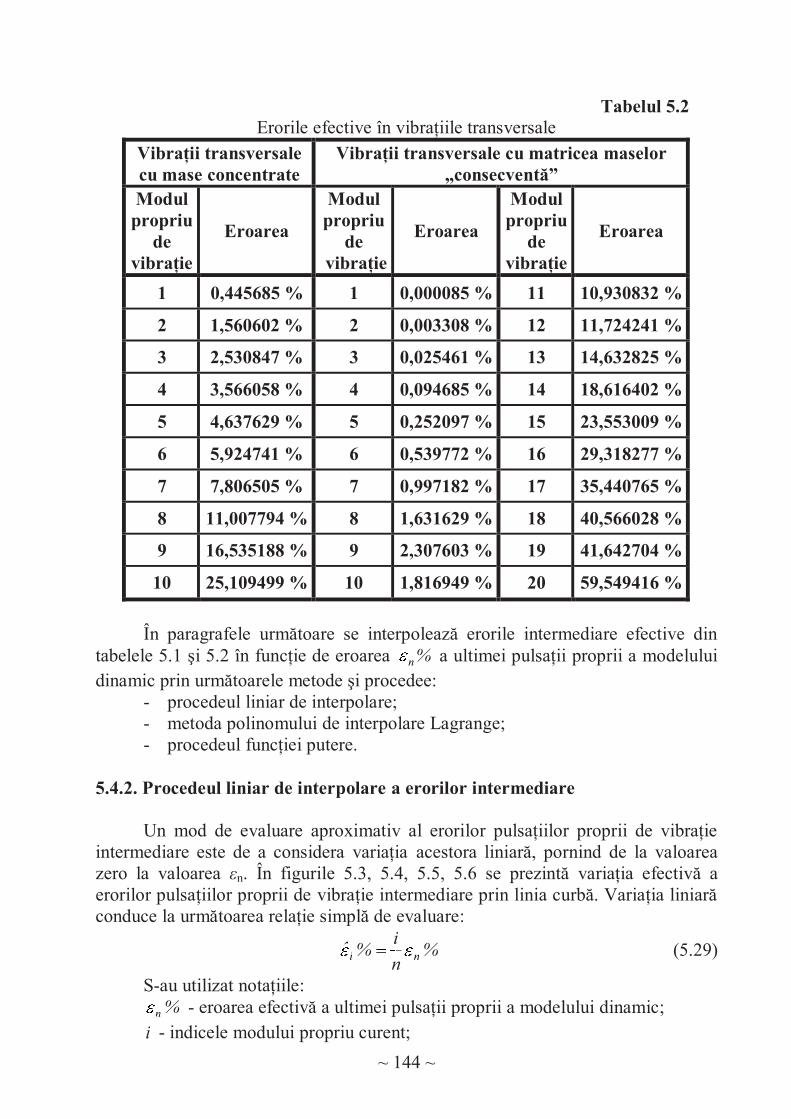
~ 144 ~
Tabelul 5.2
Erorile efective în vibraţiile transversale
Vibraţii transversale
cu mase concentrate Vibraţii transversale cu matricea maselor
„consecventă” Modul
propriu
de
vibraţie
Eroarea
Modul
propriu
de
vibraţie
Eroarea
Modul
propriu
de
vibraţie
Eroarea
1 0,445685 % 1 0,000085 % 11 10,930832 %
2 1,560602 % 2 0,003308 % 12 11,724241 %
3 2,530847 % 3 0,025461 % 13 14,632825 %
4 3,566058 % 4 0,094685 % 14 18,616402 %
5 4,637629 % 5 0,252097 % 15 23,553009 %
6 5,924741 % 6 0,539772 % 16 29,318277 %
7 7,806505 % 7 0,997182 % 17 35,440765 %
8 11,007794 % 8 1,631629 % 18 40,566028 %
9 16,535188 % 9 2,307603 % 19 41,642704 %
10 25,109499 % 10 1,816949 % 20 59,549416 %
În paragrafele următoare se interpolează erorile intermediare efective din tabelele 5.1 şi 5.2 în funcţie de eroarea %nn a ultimei pulsaţii proprii a modelului dinamic prin următoarele metode şi procedee:
- procedeul liniar de interpolare; - metoda polinomului de interpolare Lagrange; - procedeul funcţiei putere.
5.4.2. Procedeul liniar de interpolare a erorilor intermediare
Un mod de evaluare aproximativ al erorilor pulsaţiilor proprii de vibraţie intermediare este de a considera variaţia acestora liniară, pornind de la valoarea zero la valoarea εn. În figurile 5.3, 5.4, 5.5, 5.6 se prezintă variaţia efectivă a erorilor pulsaţiilor proprii de vibraţie intermediare prin linia curbă. Variaţia liniară conduce la următoarea relaţie simplă de evaluare:
%n
i%ˆ
ni nˆ
i
i (5.29)
S-au utilizat notaţiile: %nn - eroarea efectivă a ultimei pulsaţii proprii a modelului dinamic;
i - indicele modului propriu curent;
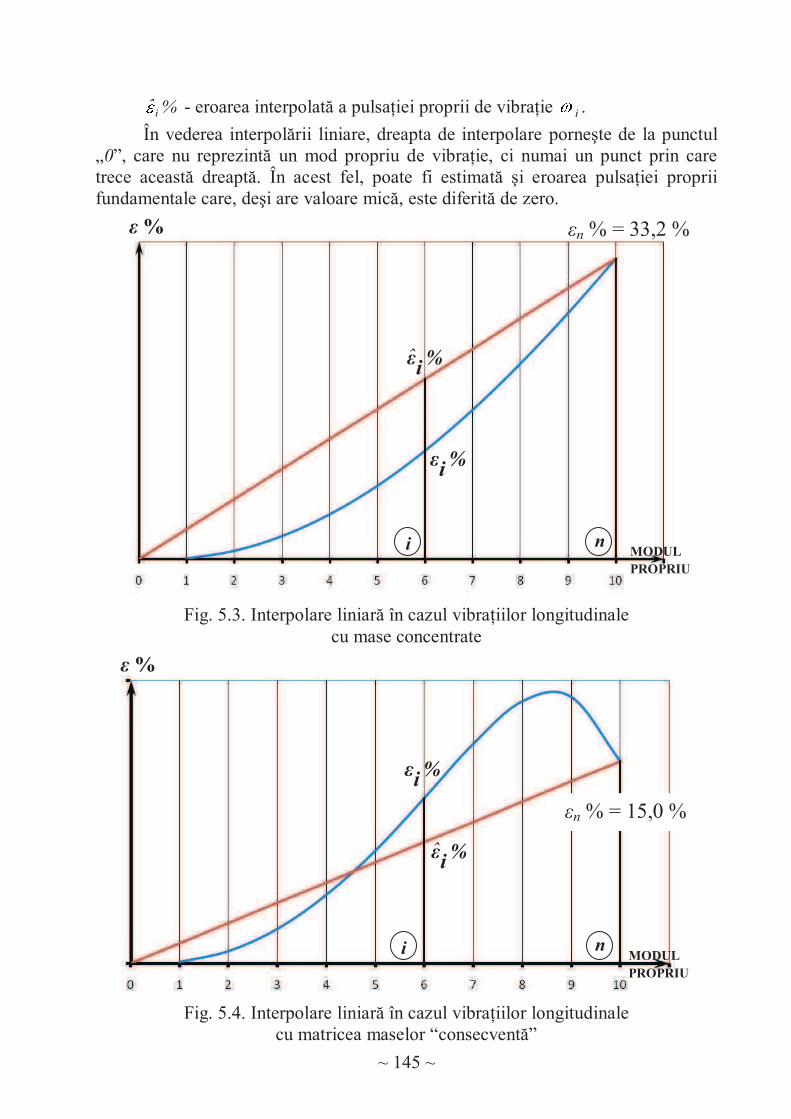
~ 145 ~
%ˆi %ˆi - eroarea interpolată a pulsaţiei proprii de vibraţie ii .
În vederea interpolării liniare, dreapta de interpolare porneşte de la punctul „0”, care nu reprezintă un mod propriu de vibraţie, ci numai un punct prin care trece această dreaptă. În acest fel, poate fi estimată şi eroarea pulsaţiei proprii fundamentale care, deşi are valoare mică, este diferită de zero.
Fig. 5.3. Interpolare liniară în cazul vibraţiilor longitudinale
cu mase concentrate
Fig. 5.4. Interpolare liniară în cazul vibraţiilor longitudinale
cu matricea maselor “consecventă”
ε %
%i
ε̂
εn % = 33,2 %
%i
ε
MODUL
PROPRIU
n i
ε %
%i
ε
%i
ε̂
MODUL
PROPRIU
n i
εn % = 15,0 %
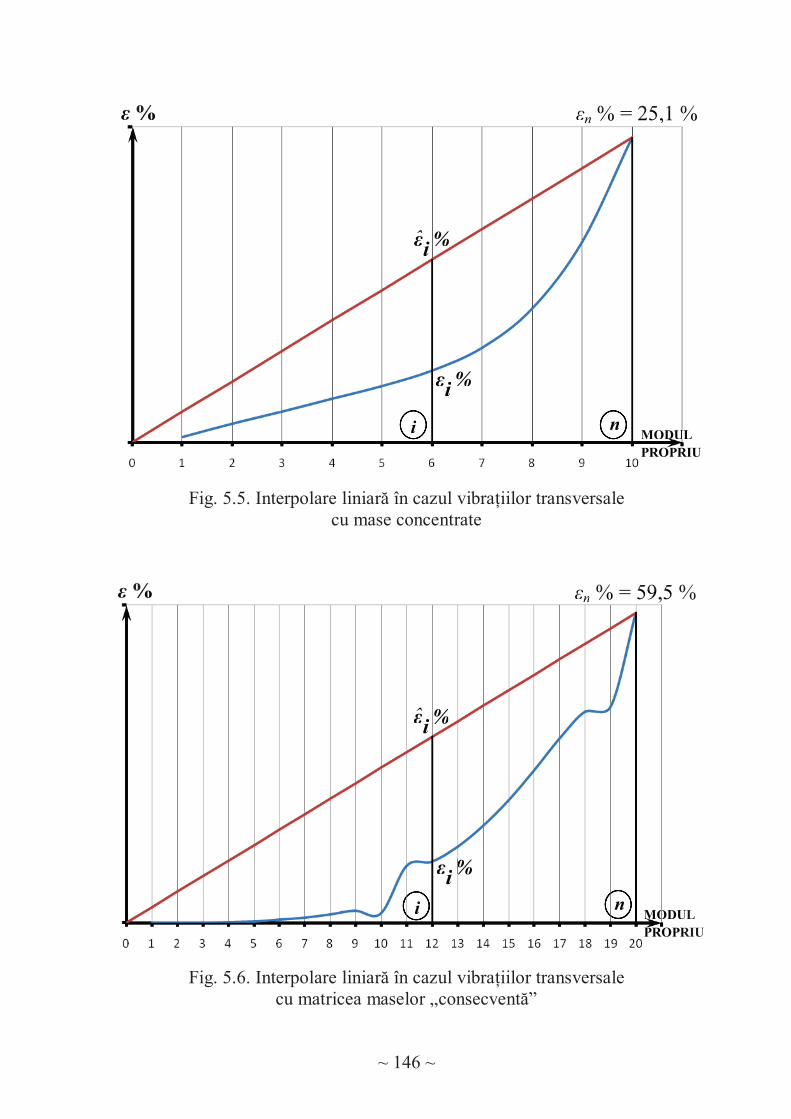
~ 146 ~
Fig. 5.5. Interpolare liniară în cazul vibraţiilor transversale
cu mase concentrate
Fig. 5.6. Interpolare liniară în cazul vibraţiilor transversale
cu matricea maselor „consecventă”
ε %
%i
ε̂
εn % = 25,1 %
%i
ε
MODUL
PROPRIU
n i
ε %
%i
ε̂
εn % = 25,1 %
%i
ε
MODUL
PROPRIU
ni
ε %
%i
ε̂
εn % = 59,5 %
%i
ε
MODUL
PROPRIU
n i
ε %
%i
ε̂
εn % = 59,5 %
%%i
ε
MOOODU
PROPR
ni
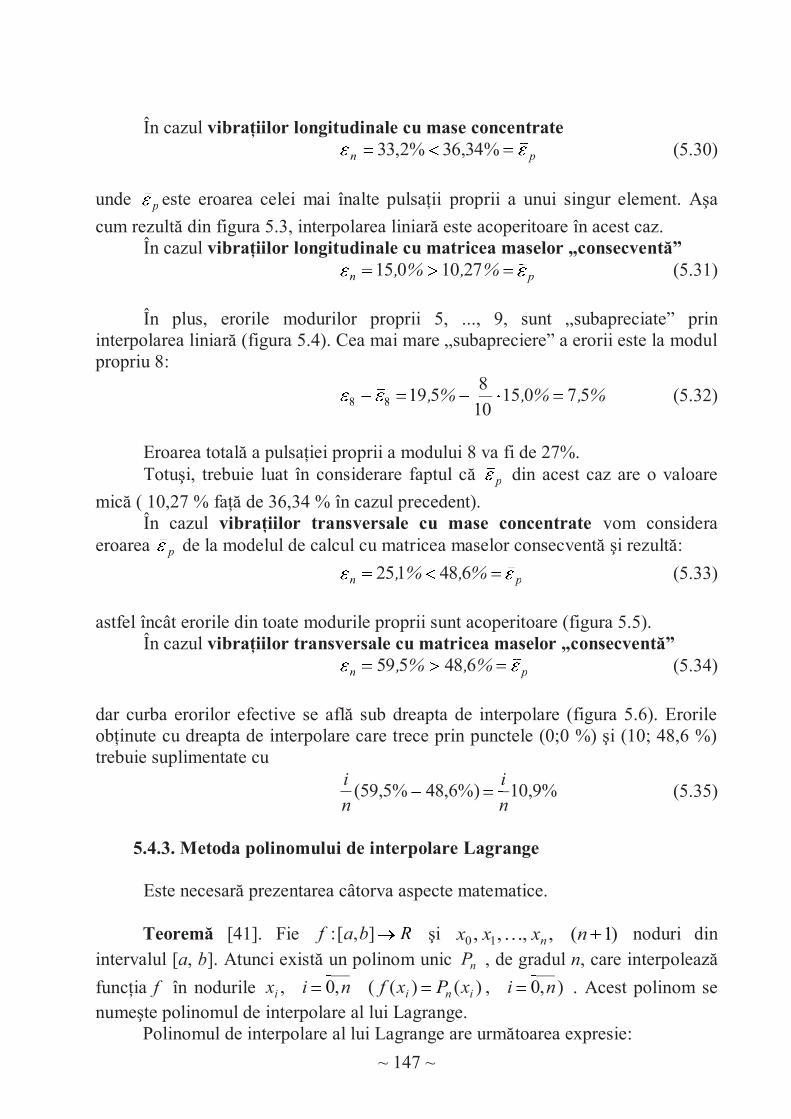
~ 147 ~
În cazul vibraţiilor longitudinale cu mase concentrate
pn pn %34,36%2,33 (5.30)
unde pp este eroarea celei mai înalte pulsaţii proprii a unui singur element. Aşa
cum rezultă din figura 5.3, interpolarea liniară este acoperitoare în acest caz. În cazul vibraţiilor longitudinale cu matricea maselor „consecventă”
pn %,%, pn 2710015 (5.31)
În plus, erorile modurilor proprii 5, ..., 9, sunt „subapreciate” prin
interpolarea liniară (figura 5.4). Cea mai mare „subapreciere” a erorii este la modul propriu 8:
%,%,%, 5701510
851988 71
1188 (5.32)
Eroarea totală a pulsaţiei proprii a modului 8 va fi de 27%. Totuşi, trebuie luat în considerare faptul că pp din acest caz are o valoare
mică ( 10,27 % faţă de 36,34 % în cazul precedent). În cazul vibraţiilor transversale cu mase concentrate vom considera
eroarea pp de la modelul de calcul cu matricea maselor consecventă şi rezultă:
pn %,%, pn 648125 (5.33)
astfel încât erorile din toate modurile proprii sunt acoperitoare (figura 5.5). În cazul vibraţiilor transversale cu matricea maselor „consecventă”
pn %,%, pn 648559 (5.34)
dar curba erorilor efective se află sub dreapta de interpolare (figura 5.6). Erorile obţinute cu dreapta de interpolare care trece prin punctele (0;0 %) şi (10; 48,6 %) trebuie suplimentate cu
%9,10%)6,48%5,59(n
i
n
i i4 (5.35)
5.4.3. Metoda polinomului de interpolare Lagrange
Este necesară prezentarea câtorva aspecte matematice.
Teoremă [41]. Fie Rbaf R],[: şi )1(,,,, 10 1nxxx nK noduri din intervalul [a, b]. Atunci există un polinom unic nP , de gradul n, care interpolează
funcţia f în nodurile ),0,)()((,0, nixPxfnix inii 0P0 . Acest polinom se numeşte polinomul de interpolare al lui Lagrange.
Polinomul de interpolare al lui Lagrange are următoarea expresie:
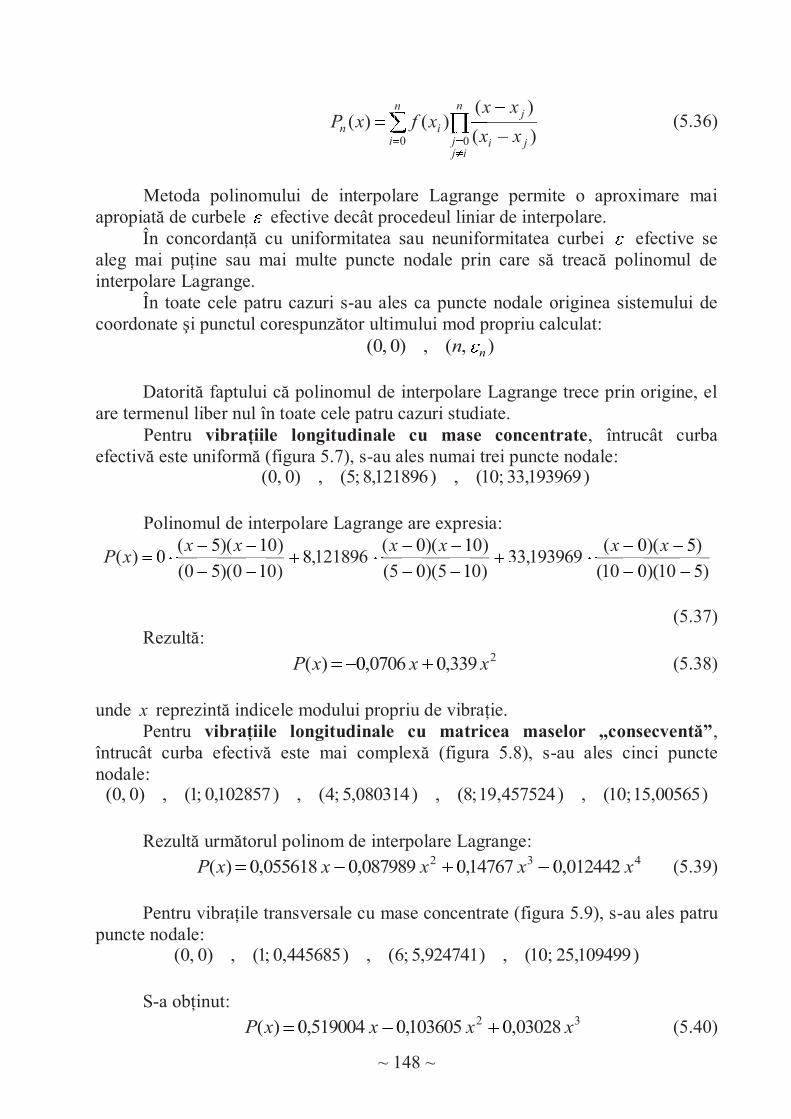
~ 148 ~
n
i
n
ijj ji
j
inxx
xxxfxP
0 0 )(
)()()( (5.36)
Metoda polinomului de interpolare Lagrange permite o aproximare mai
apropiată de curbele efective decât procedeul liniar de interpolare. În concordanţă cu uniformitatea sau neuniformitatea curbei efective se
aleg mai puţine sau mai multe puncte nodale prin care să treacă polinomul de interpolare Lagrange.
În toate cele patru cazuri s-au ales ca puncte nodale originea sistemului de coordonate şi punctul corespunzător ultimului mod propriu calculat:
),(,)0,0( nn n
Datorită faptului că polinomul de interpolare Lagrange trece prin origine, el are termenul liber nul în toate cele patru cazuri studiate.
Pentru vibraţiile longitudinale cu mase concentrate, întrucât curba efectivă este uniformă (figura 5.7), s-au ales numai trei puncte nodale:
)193969,33;10(,)121896,8;5(,)0,0(
Polinomul de interpolare Lagrange are expresia:
)510)(010(
)5)(0(193969,33
)105)(05(
)10)(0(121896,8
)100)(50(
)10)(5(0)(
50
50
(3
10
10(8
15
15(0
xxxxxxxP
(5.37)
Rezultă: 2339,00706,0)( xxxP 00 (5.38)
unde x reprezintă indicele modului propriu de vibraţie. Pentru vibraţiile longitudinale cu matricea maselor „consecventă”, întrucât curba efectivă este mai complexă (figura 5.8), s-au ales cinci puncte nodale:
)00565,15;10(,)457524,19;8(,)080314,5;4(,)102857,0;1(,)0,0(
Rezultă următorul polinom de interpolare Lagrange: 432 012442,014767,0087989,0055618,0)( xxxxxP 0000 (5.39)
Pentru vibraţile transversale cu mase concentrate (figura 5.9), s-au ales patru puncte nodale:
)109499,25;10(,)924741,5;6(,)445685,0;1(,)0,0(
S-a obţinut: 32 03028,0103605,0519004,0)( xxxxP 000 (5.40)
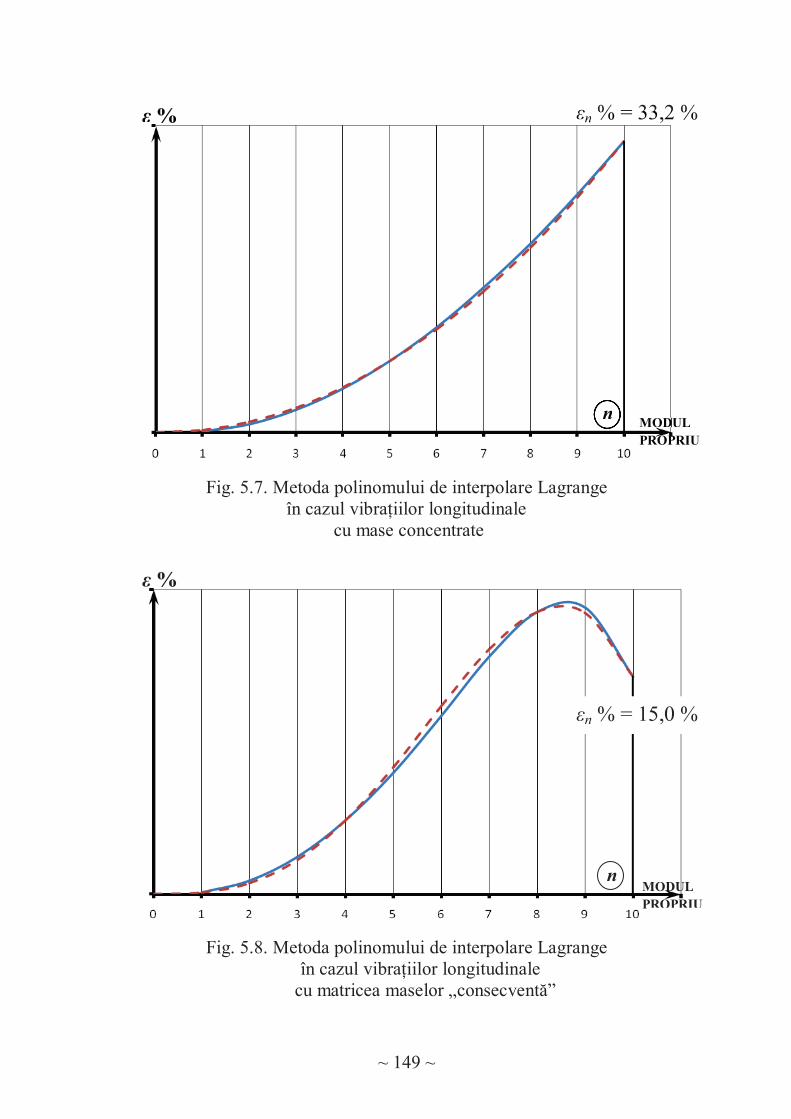
~ 149 ~
Fig. 5.7. Metoda polinomului de interpolare Lagrange
în cazul vibraţiilor longitudinale cu mase concentrate
Fig. 5.8. Metoda polinomului de interpolare Lagrange
în cazul vibraţiilor longitudinale cu matricea maselor „consecventă”
ε % εn % = 33,2 %
MODUL
PROPRIU
n
ε % εn % = 33,2 %
MODUL
PROPRIU
n
ε %
εn % = 15,0 %
MODUL
PROPRIU
n
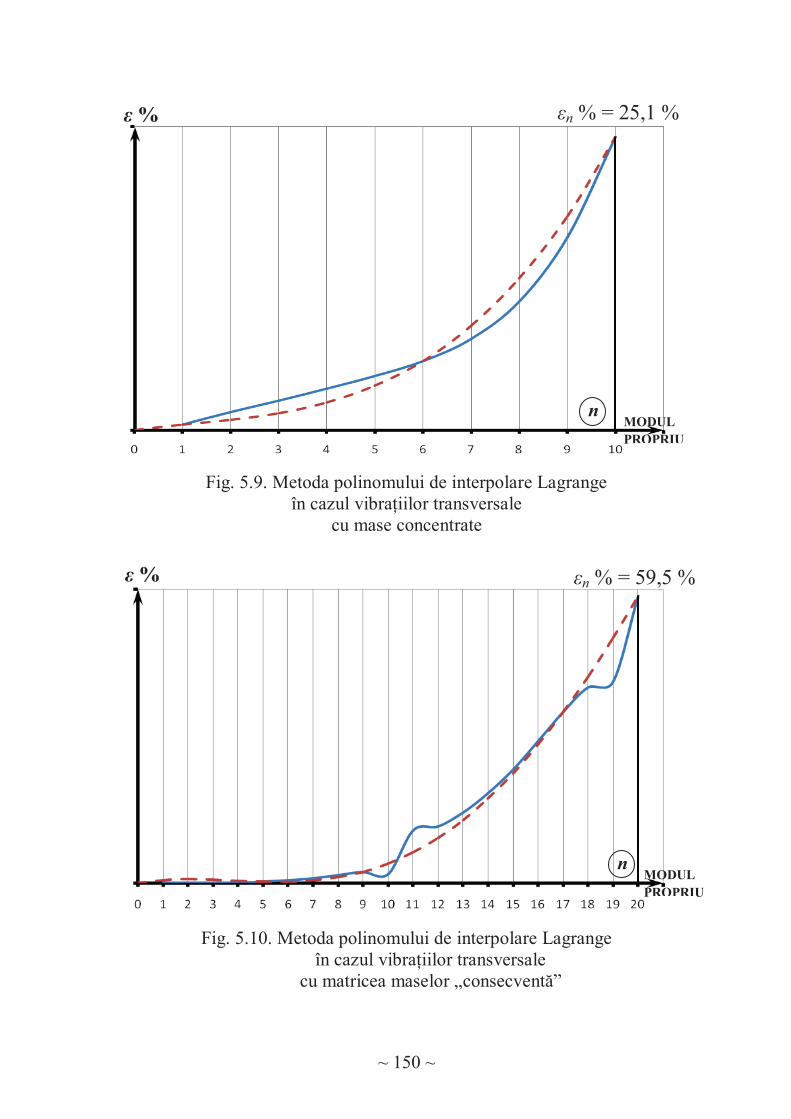
~ 150 ~
Fig. 5.9. Metoda polinomului de interpolare Lagrange
în cazul vibraţiilor transversale cu mase concentrate
Fig. 5.10. Metoda polinomului de interpolare Lagrange
în cazul vibraţiilor transversale cu matricea maselor „consecventă”
ε % εn % = 25,1 %
MODUL
PROPRIU
n
ε % εn % = 59,5 %
MODUL
PROPRIU
n

~ 151 ~
Pentru vibraţiile transversale cu matricea maselor „consecventă” (figura 5.10) s-au ales cinci puncte nodale:
)549416,59;20(,)440765,35;17(,)307603,2;9(,)252097,0;5(,)0,0(
A rezultat: 432 000565242,0032276573,031502514,0889286111,0)( xxxxxP 0000 (5.41)
În figurile 5.7, 5.8, 5.9 şi 5.10 curba efectivă este reprezentată prin linie continuă, iar polinomul de interpolare Lagrange prin linie întreruptă. De menţionat că în modurile proprii joase eroarea este deosebit de mică (de exemplu figura 5.10) ceea ce impune atenţie la selectarea punctelor nodale şi a numărului de zecimale cu care se operează în determinarea polinomului.
5.4.4. Procedeul funcţiei putere
Acest procedeu este eficient şi simplu de aplicat în cazul vibraţiilor cu mase concentrate (figurile 5.11 şi 5.12).
Funcţia de interpolare are expresia: b
i iaai (5.42)
unde i este indicele modului propriu, iar ii este eroarea pulsaţiei proprii ii în raport cu soluţia analitică. Funcţia (5.42) trece prin origine. Constantele a şi b se determină prin exprimarea erorii efective pentru două moduri proprii de vibraţie diferite, i şi j.
bj jaaj (5.43)
Din egalităţile (5.42) şi (5.43) rezultă:
b
i
j
i
jb
ii
jj
i
j (5.44)
Expresia exponentului va fi:
ilogjlog
loglogb
ij
lo
lol ij (5.45)
Din relaţia (5.42) se obţine:
b
i
ia i
i (5.46)
Utilizând 55i şi 101j , în cazul vibraţiilor longitudinale cu mase concentrate, a rezultat expresia simplă :
(5.47) 3
%2i
i 3
ii
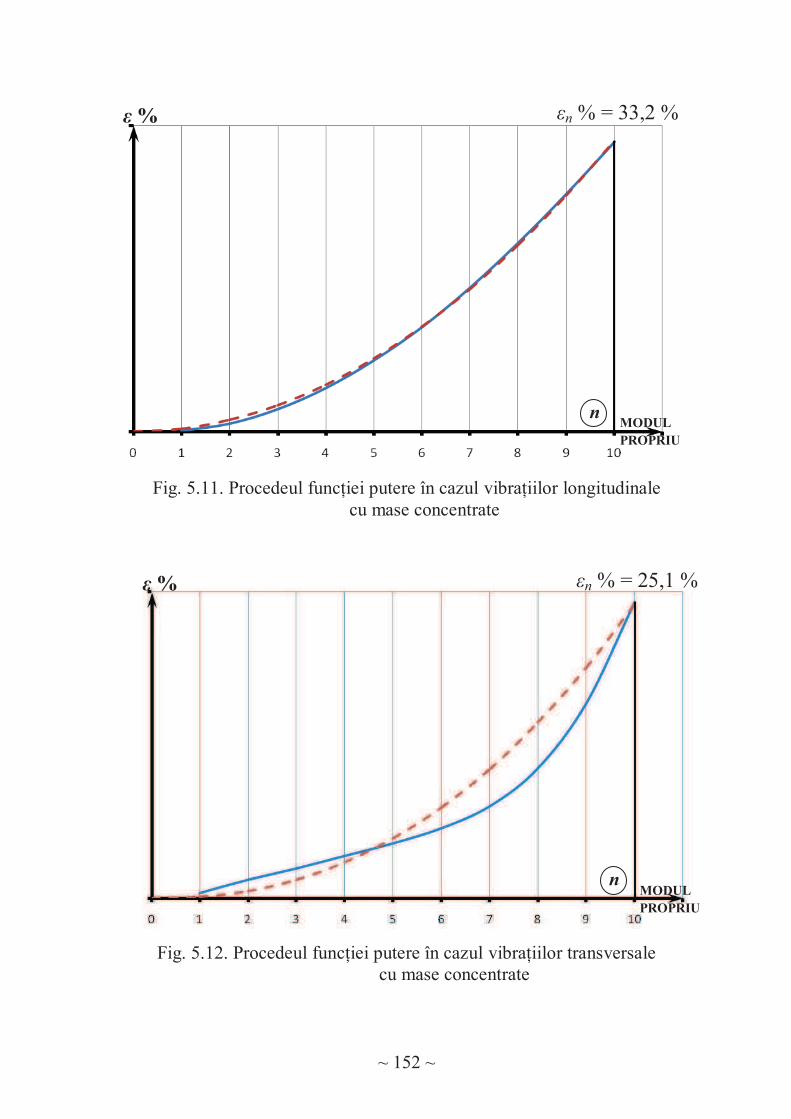
~ 152 ~
Fig. 5.11. Procedeul funcţiei putere în cazul vibraţiilor longitudinale
cu mase concentrate
Fig. 5.12. Procedeul funcţiei putere în cazul vibraţiilor transversale
cu mase concentrate
ε % εn % = 33,2 %
MODUL
PROPRIU
n
ε % εn % = 25,1 %
MODUL
PROPRIU
n
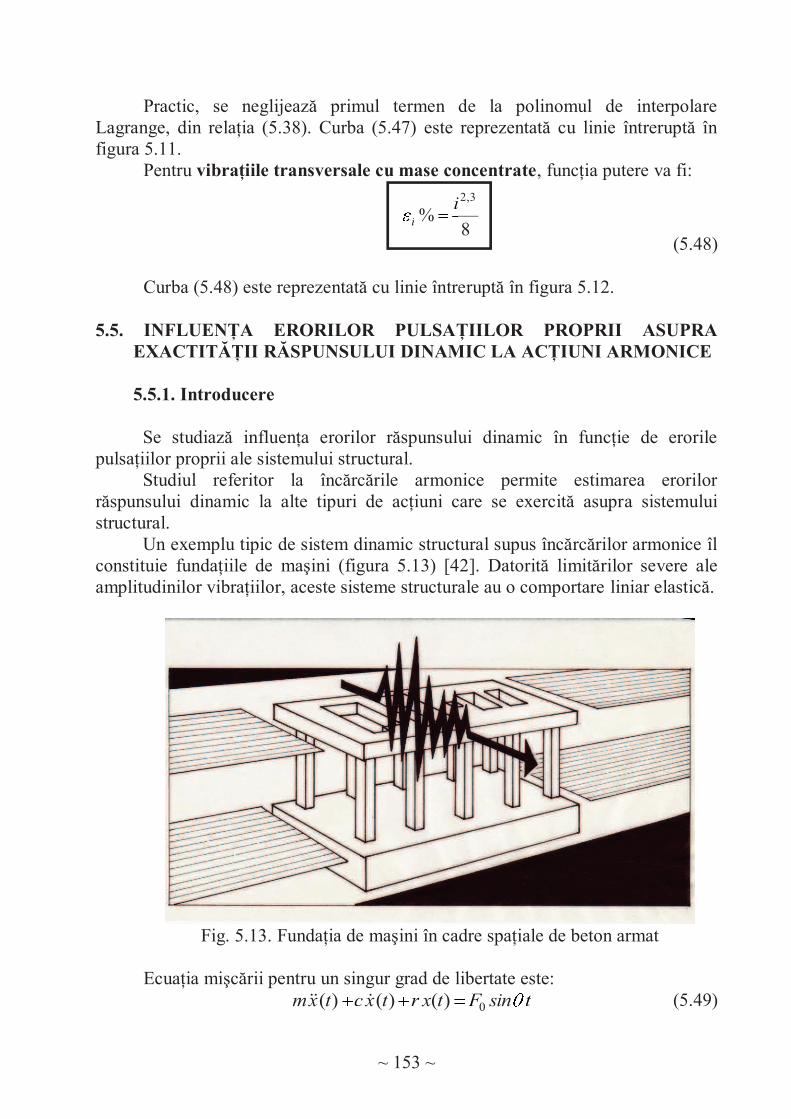
~ 153 ~
Practic, se neglijează primul termen de la polinomul de interpolare Lagrange, din relaţia (5.38). Curba (5.47) este reprezentată cu linie întreruptă în figura 5.11. Pentru vibraţiile transversale cu mase concentrate, funcţia putere va fi:
(5.48)
Curba (5.48) este reprezentată cu linie întreruptă în figura 5.12. 5.5. INFLUENŢA ERORILOR PULSAŢIILOR PROPRII ASUPRA
EXACTITĂŢII RĂSPUNSULUI DINAMIC LA ACŢIUNI ARMONICE
5.5.1. Introducere
Se studiază influenţa erorilor răspunsului dinamic în funcţie de erorile pulsaţiilor proprii ale sistemului structural.
Studiul referitor la încărcările armonice permite estimarea erorilor răspunsului dinamic la alte tipuri de acţiuni care se exercită asupra sistemului structural.
Un exemplu tipic de sistem dinamic structural supus încărcărilor armonice îl constituie fundaţiile de maşini (figura 5.13) [42]. Datorită limitărilor severe ale amplitudinilor vibraţiilor, aceste sisteme structurale au o comportare liniar elastică.
Fig. 5.13. Fundaţia de maşini în cadre spaţiale de beton armat
Ecuaţia mişcării pentru un singur grad de libertate este:
tsinFtxrtxctxm t0)()()( Frc &&& (5.49)
8%
3,2ii
ii
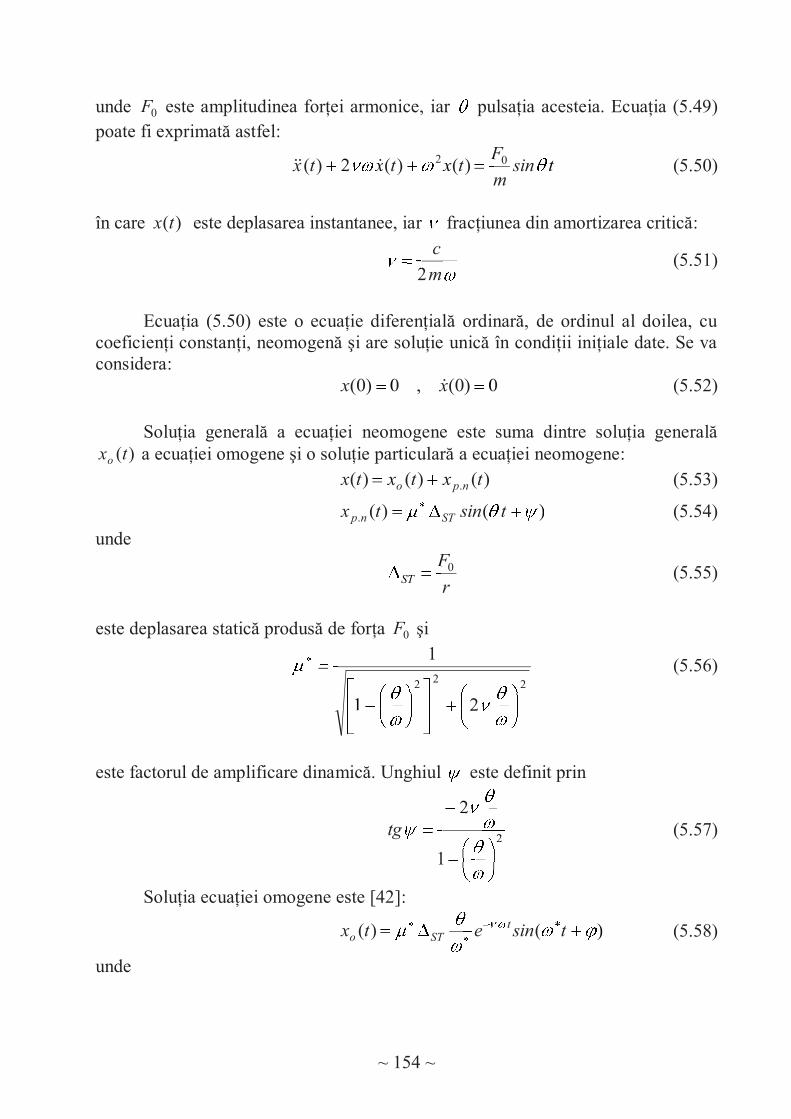
~ 154 ~
unde 0F este amplitudinea forţei armonice, iar pulsaţia acesteia. Ecuaţia (5.49) poate fi exprimată astfel:
tsinm
Ftxtxtx txx 02 )()(2)(
F2 &&& (5.50)
în care )(tx este deplasarea instantanee, iar fracţiunea din amortizarea critică:
m
c
22 (5.51)
Ecuaţia (5.50) este o ecuaţie diferenţială ordinară, de ordinul al doilea, cu coeficienţi constanţi, neomogenă şi are soluţie unică în condiţii iniţiale date. Se va considera:
0)0(,0)0( 00 xx & (5.52)
Soluţia generală a ecuaţiei neomogene este suma dintre soluţia generală )(txo a ecuaţiei omogene şi o soluţie particulară a ecuaţiei neomogene:
)()()( . txtxtx npo xx (5.53)
)()(. )( tsintx STnp (5.54)
unde
r
FST
0FST (5.55)
este deplasarea statică produsă de forţa 0F şi
222
21
1
2
222
2
112
(5.56)
este factorul de amplificare dinamică. Unghiul este definit prin
2
1
2
2
22tg (5.57)
Soluţia ecuaţiei omogene este [42]:
)()( )( tsinetx tSTo (5.58)
unde

~ 155 ~
12
12,1
22
22
12
2 2
2221 tg (5.59)
Deplasarea )(. tx np reprezintă răspunsul staţionar, iar )(txo răspunsul
tranzitoriu.
5.5.2. Răspunsul dinamic staţionar
Amplitudinea răspunsului staţionar rezultă din (5.54):
222
2
20
21
),(2
222
2
112
2
2
2),(
m
Fxo (5.60)
Se studiază valoarea absolută a erorii relative
),(
),(),(),,(
),(
),(),(),,((
o
oo
x
xx xx (5.61)
unde este eroarea pulsaţiei proprii analizată în paragrafele precedente, dar exprimată în raport cu unitatea şi nu în procente. Expresia (5.61) este o funcţie de
şi .
S-au analizat erorile ale răspunsului staţionar pentru fracţiunile din amortizarea critică
05,0,02,0 00 şi 10,00 (5.62) şi erorile pulsaţiilor proprii
%1,%1,0 10 şi %33 (5.63)
Rezultatele sunt centralizate în tabelul 5.3. S-au înregistrat erorile în
procente pentru 00 (acţiune statică), 11 (vecinătatea rezonanţei) precum şi
95,00 şi 05,11 care se află în zona rezonanţei:
2,18,0 1 (5.64)
În zona rezonanţei erorile răspunsului dinamic sunt maxime. În vecinătatea rezonanţei acestea sunt nule, deoarece erorile trec de la valorile pozitive la cele negative şi s-a considerat valoarea absolută a acestora.
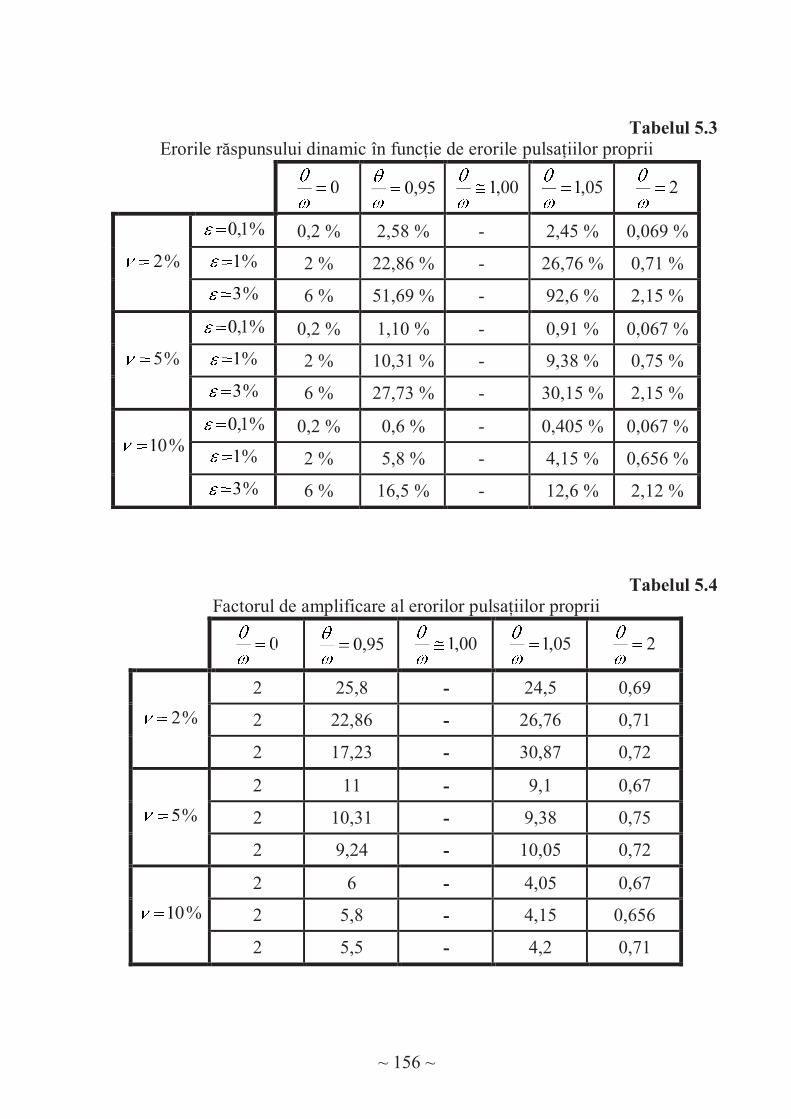
~ 156 ~
Tabelul 5.3
Erorile răspunsului dinamic în funcţie de erorile pulsaţiilor proprii
Tabelul 5.4
Factorul de amplificare al erorilor pulsaţiilor proprii
00
95,00
00,1,1
05,11
22
%22
2 25,8 - 24,5 0,69
2 22,86 - 26,76 0,71
2 17,23 - 30,87 0,72
%55
2 11 - 9,1 0,67
2 10,31 - 9,38 0,75
2 9,24 - 10,05 0,72
%101
2 6 - 4,05 0,67
2 5,8 - 4,15 0,656
2 5,5 - 4,2 0,71
00
95,00
00,1,1
05,11
22
%22
%1,00 0,2 % 2,58 % - 2,45 % 0,069 %
%11 2 % 22,86 % - 26,76 % 0,71 %
%33 6 % 51,69 % - 92,6 % 2,15 %
%55
%1,00 0,2 % 1,10 % - 0,91 % 0,067 %
%11 2 % 10,31 % - 9,38 % 0,75 %
%33 6 % 27,73 % - 30,15 % 2,15 %
%101
%1,00 0,2 % 0,6 % - 0,405 % 0,067 %
%11 2 % 5,8 % - 4,15 % 0,656 %
%33 6 % 16,5 % - 12,6 % 2,12 %
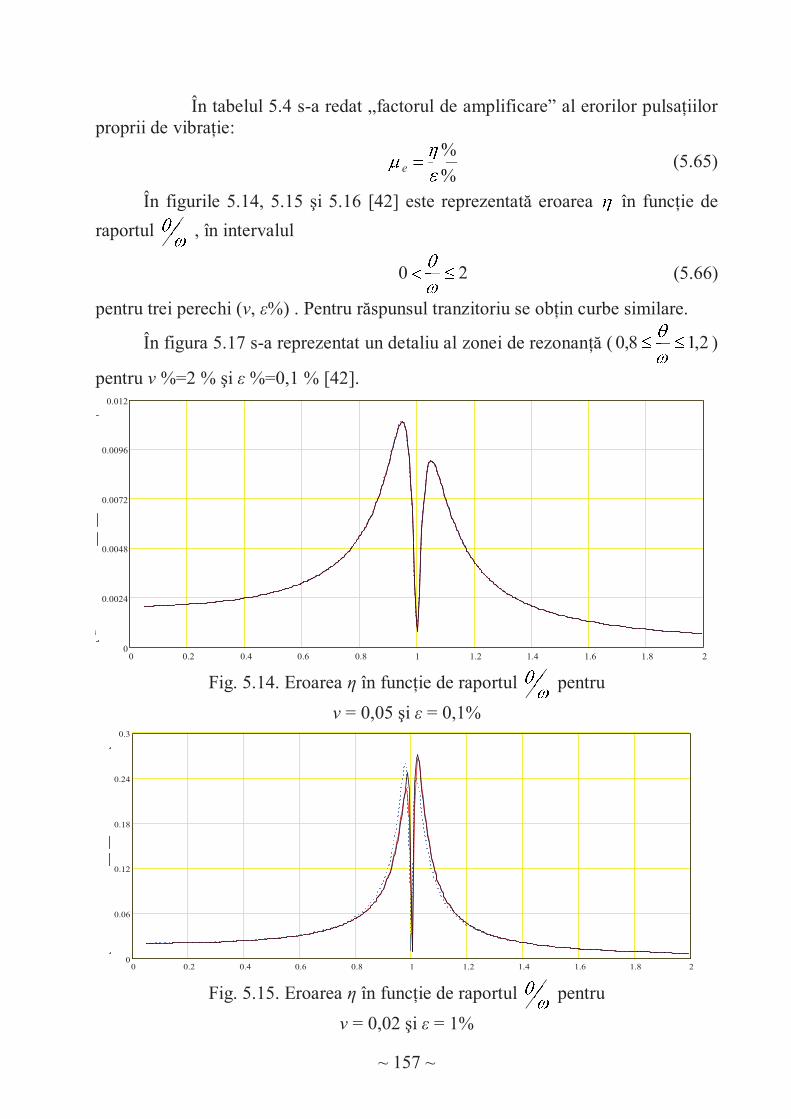
~ 157 ~
În tabelul 5.4 s-a redat „factorul de amplificare” al erorilor pulsaţiilor proprii de vibraţie:
%
%
%
%e (5.65)
În figurile 5.14, 5.15 şi 5.16 [42] este reprezentată eroarea în funcţie de
raportul , în intervalul
20 2 (5.66)
pentru trei perechi (ν, ε%) . Pentru răspunsul tranzitoriu se obţin curbe similare.
În figura 5.17 s-a reprezentat un detaliu al zonei de rezonanţă ( 2,18,0 1 )
pentru ν %=2 % şi ε %=0,1 % [42].
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.0024
0.0048
0.0072
0.0096
0.0120.011
4
u)
u)
Fig. 5.14. Eroarea η în funcţie de raportul pentru
ν = 0,05 şi ε = 0,1%
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.06
0.12
0.18
0.24
0.30.271
3
u)
u)
20.05 x
Fig. 5.15. Eroarea η în funcţie de raportul pentru
ν = 0,02 şi ε = 1%
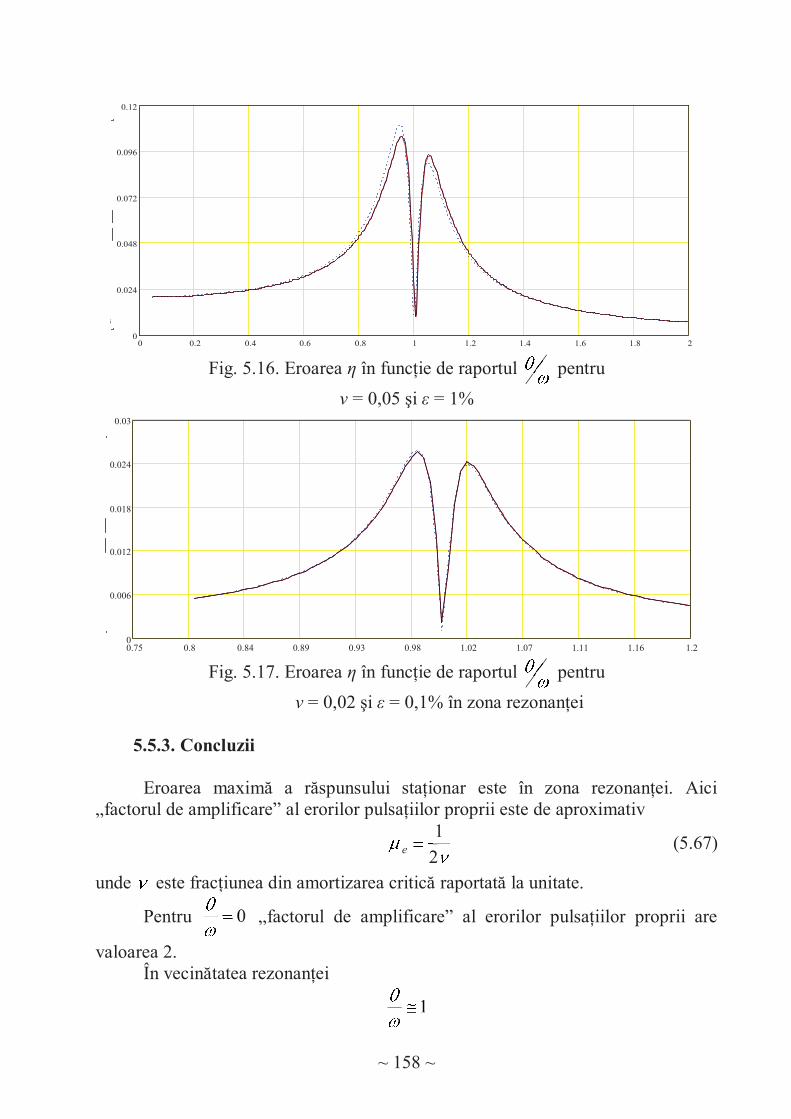
~ 158 ~
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.024
0.048
0.072
0.096
0.120.11
3
u)
u)
Fig. 5.16. Eroarea η în funcţie de raportul pentru
ν = 0,05 şi ε = 1%
0.75 0.8 0.84 0.89 0.93 0.98 1.02 1.07 1.11 1.16 1.20
0.006
0.012
0.018
0.024
0.036
4
)
)
Fig. 5.17. Eroarea η în funcţie de raportul pentru
ν = 0,02 şi ε = 0,1% în zona rezonanţei
5.5.3. Concluzii
Eroarea maximă a răspunsului staţionar este în zona rezonanţei. Aici „factorul de amplificare” al erorilor pulsaţiilor proprii este de aproximativ
2
1
2e (5.67)
unde este fracţiunea din amortizarea critică raportată la unitate.
Pentru 00 „factorul de amplificare” al erorilor pulsaţiilor proprii are
valoarea 2. În vecinătatea rezonanţei
11
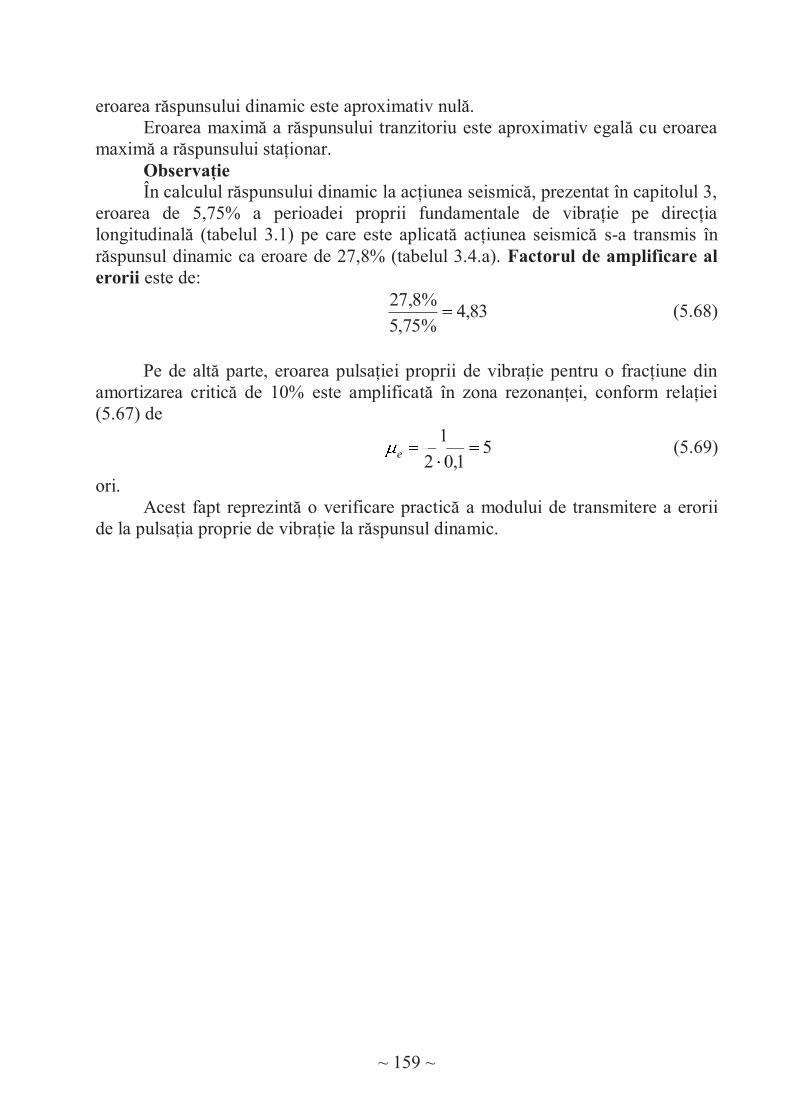
~ 159 ~
eroarea răspunsului dinamic este aproximativ nulă. Eroarea maximă a răspunsului tranzitoriu este aproximativ egală cu eroarea maximă a răspunsului staţionar. Observaţie În calculul răspunsului dinamic la acţiunea seismică, prezentat în capitolul 3, eroarea de 5,75% a perioadei proprii fundamentale de vibraţie pe direcţia longitudinală (tabelul 3.1) pe care este aplicată acţiunea seismică s-a transmis în răspunsul dinamic ca eroare de 27,8% (tabelul 3.4.a). Factorul de amplificare al
erorii este de:
83,4%75,5
%8,274 (5.68)
Pe de altă parte, eroarea pulsaţiei proprii de vibraţie pentru o fracţiune din amortizarea critică de 10% este amplificată în zona rezonanţei, conform relaţiei (5.67) de
51,02
15
02ee (5.69)
ori. Acest fapt reprezintă o verificare practică a modului de transmitere a erorii de la pulsaţia proprie de vibraţie la răspunsul dinamic.
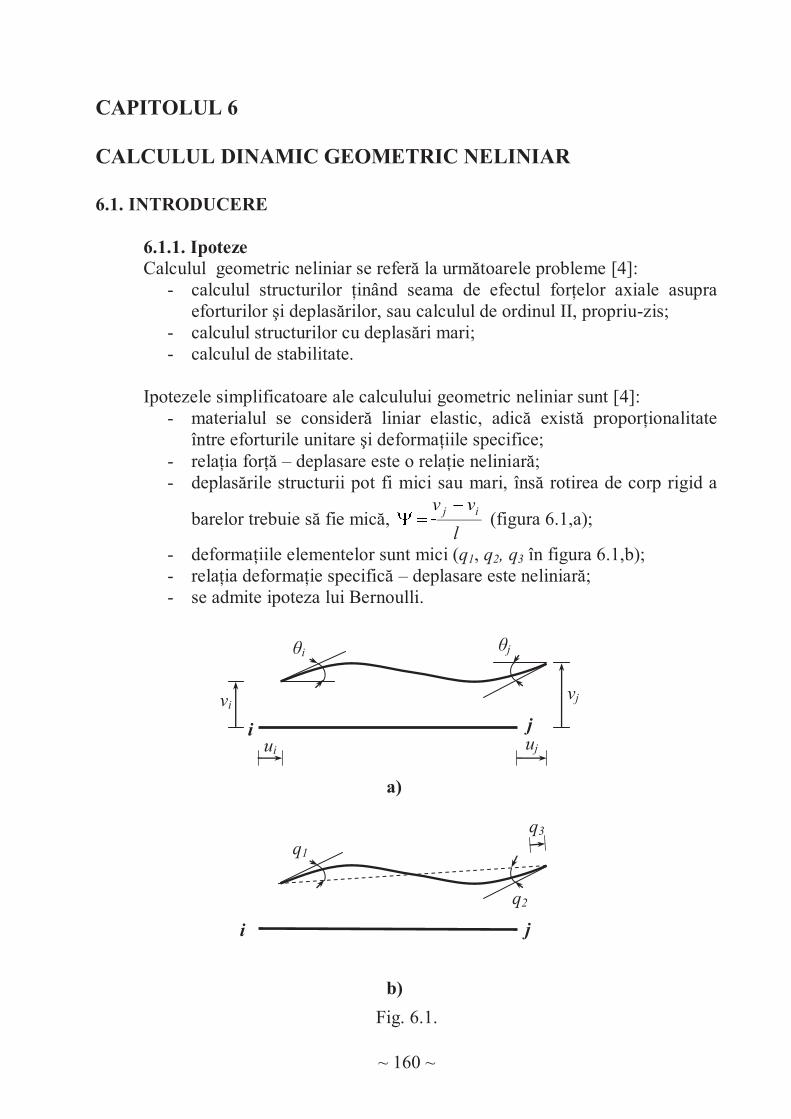
~ 160 ~
CAPITOLUL 6
CALCULUL DINAMIC GEOMETRIC NELINIAR
6.1. INTRODUCERE
6.1.1. Ipoteze
Calculul geometric neliniar se referă la următoarele probleme [4]: - calculul structurilor ţinând seama de efectul forţelor axiale asupra
eforturilor şi deplasărilor, sau calculul de ordinul II, propriu-zis; - calculul structurilor cu deplasări mari; - calculul de stabilitate.
Ipotezele simplificatoare ale calculului geometric neliniar sunt [4]:
- materialul se consideră liniar elastic, adică există proporţionalitate între eforturile unitare şi deformaţiile specifice;
- relaţia forţă – deplasare este o relaţie neliniară; - deplasările structurii pot fi mici sau mari, însă rotirea de corp rigid a
barelor trebuie să fie mică, l
vv ij vv (figura 6.1,a);
- deformaţiile elementelor sunt mici (q1, q2, q3 în figura 6.1,b); - relaţia deformaţie specifică – deplasare este neliniară; - se admite ipoteza lui Bernoulli.
Fig. 6.1.
vi
i
a)
j
ui
θj θi
uj
vj
b)
i j
q1
q3
q2
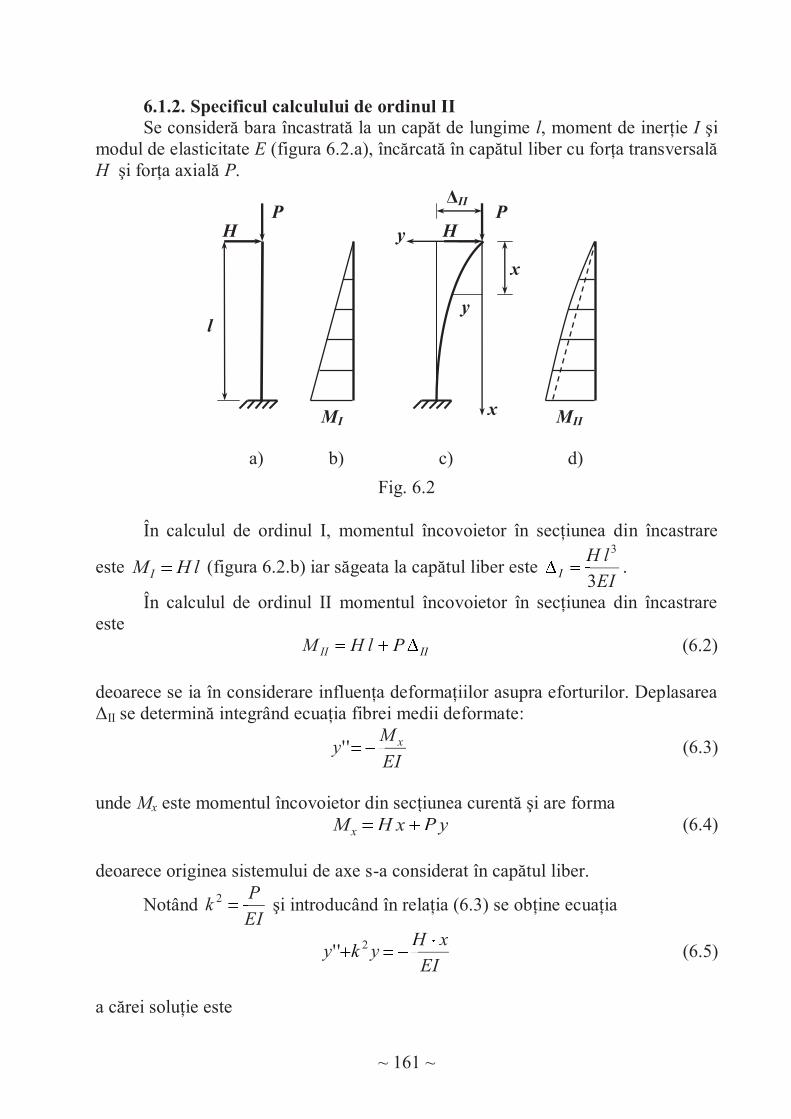
~ 161 ~
6.1.2. Specificul calculului de ordinul II
Se consideră bara încastrată la un capăt de lungime l, moment de inerţie I şi modul de elasticitate E (figura 6.2.a), încărcată în capătul liber cu forţa transversală H şi forţa axială P.
Fig. 6.2
În calculul de ordinul I, momentul încovoietor în secţiunea din încastrare
este lHM I H (figura 6.2.b) iar săgeata la capătul liber este EI
lHI 3
3H
3I .
În calculul de ordinul II momentul încovoietor în secţiunea din încastrare este
IIII PlHM IIPH (6.2)
deoarece se ia în considerare influenţa deformaţiilor asupra eforturilor. Deplasarea ΔII se determină integrând ecuaţia fibrei medii deformate:
EI
My x
E
M'' (6.3)
unde Mx este momentul încovoietor din secţiunea curentă şi are forma
yPxHM x PH (6.4)
deoarece originea sistemului de axe s-a considerat în capătul liber.
Notând EI
Pk
E
P2 şi introducând în relaţia (6.3) se obţine ecuaţia
EI
xHyky
xHk 2'' (6.5)
a cărei soluţie este
P P H H
l
y
x
x
y
MII MI
ΔII
a) b) c) d)

~ 162 ~
xP
HxkCxkCy
P
HCC cossin 21 (6.6)
Constantele C1 şi C2 se determină din următoarele condiţii la limită: - pentru 00 00 yx - pentru 0' 0ylx
Expresia rotirii este
P
HxkkCxkkCy
P
HCC sincos' 21 (6.7)
Din relaţiile (6.6) şi (6.7) se obţine
lkkP
HCC
cos,0 12
P0 (6.8)
Deplasarea secţiunii curente este
xlkk
xk
P
Hy
cos
sin (6.9)
iar momentul încovoietor în aceeaşi secţiune, conform relaţiei (5.4), are expresia:
vv
xklHM x cos
sinH (6.10)
unde s-a introdus notaţia EI
Pllkv lk .
Deplasarea maximă ΔII se obţine pentru lx l
3
3 )(3
3cos
sin
v
vvtg
EI
lHl
lkk
lk
P
HII
v3
3
H
kkkl
P
HII (6.11)
sau )(1 vIII (1III (6.12)
Funcţia 31)(3
)(v
vvtgv
v31( reprezintă influenţa forţei axiale asupra mărimii
deplasării maxime. Momentul încovoietor din încastrare, conform relaţiei (6.2), devine
)(2 vMv
vtglHM III (2MH (6.13)
unde v
vtgv
tg)(2 (2 este funcţia de corecţie ce introduce influenţa forţei axiale
asupra momentului încovoietor maxim. În calculul de ordinul II, atât deplasările cât şi eforturile se determină în funcţie de caracteristicile barei (E, I, l) şi de forţa axială.
~ 163 ~
În calculul de ordinul I relaţia între forţa orizontală şi deplasarea ΔI se exprimă astfel
IIKH IK , unde 3
3
l
EIK I
3 (6.14)
Exprimând aceeaşi relaţie în calculul de ordinul II se obţine
IIIIKH IIK , unde )(
1
)(
13
113 v
Kvl
EIK III (1(1
K3
(6.15)
Funcţia β1(v) este supraunitară, deoarece în intervalul 2
02
v tangenta
creşte mai repede decât parametrul v. Rezultă că pe măsură ce forţa axială creşte, rigiditatea barei scade şi ajunge să aibă (teoretic) valoarea zero pentru o deplasare egală cu infinit [4]. 6.2. PRINCIPIILE CALCULULUI DINAMIC GEOMETRIC NELINIAR
6.2.1. Calculul dinamic liniar şi geometric neliniar
Calculul geometric neliniar, prin specificul său, consideră influenţa deformaţiilor asupra răspunsului structurii, forţele fiind aplicate static. Cu alte cuvinte, se cuantifică influenţa modificării geometriei sistemului structural asupra rigidităţii sale. Concluzia imediată a calculului static, geometric neliniar, este aceea că rigiditatea sistemului structural nu este o caracteristică proprie a acestuia (cum apărea în calculul de ordinul I) ci depinde de mărimea încărcărilor [6]. Din calculul dinamic liniar elastic rezultă că pulsaţiile şi perioadele de vibraţie sunt caracteristici dinamice proprii ale sistemului structural, deci nu depind de nivelul încărcărilor care acţionează asupra acestuia. Dacă rigiditatea sistemului dinamic structural depinde de nivelul încărcărilor, este firesc ca şi pulsaţiile şi perioadele vibraţiilor să depindă de încărcări deoarece structura vibrează având încărcările aplicate asupra sa. În acest capitol se prezintă influenţa modificării geometriei sistemului dinamic structural asupra pulsaţiilor şi perioadelor de vibraţie.
6.2.2. Ecuaţia mişcării În calculul liniar elastic condiţia de echilibru dinamic instantaneu conduce la următoarea formă a ecuaţiei mişcării:
)}({}]{[}]{[}]{[ tFxKxCxM {[[ &&& (6.16)
unde [K] este matricea de rigiditate a structurii respectiv matricea de rigiditate elastică:
][][ EKK [K (6.17)

~ 164 ~
În calculul static geometric neliniar, echilibrul static conduce la relaţia }{}]{[ FxK { (6.18)
unde [K] reprezintă, de asemenea, matricea de rigiditate a structurii dar conţine şi efectul modificării geometriei structurii şi are forma:
][][][ GE KKK [[K (6.19)
unde [KG] este matricea de rigiditate geometrică. În acest capitol se va considera că matricea [KG] este matricea de rigiditate tangentă. Ţinând seama de (6.19), relaţia (6.16) devine:
)}({}]){[]([}]{[}]{[ tFxKKxCxM GE {[([ &&& (6.20)
Prin particularizare, din (6.20) se obţine sistemul de ecuaţii al vibraţiilor libere neamortizate:
)}({}]){[]([}]{[ tFxKKxM GE {[(&& (6.21)
6.3. MATRICEA DE RIGIDITATE GEOMETRICĂ A BAREI
6.3.1. Bara dublu articulată
În figura 6.3 se prezintă bara dublu articulată, în calculul plan.
Fig. 6.3
Matricea de rigiditate geometrică va avea forma [4]:
1010
0000
1010
0000
][l
NkG (6.22)
unde N este forţa axială. Pentru bara dublu articulată, în calculul spaţial, matricea de rigiditate geometrică este [4]:
1
4 3
2
l
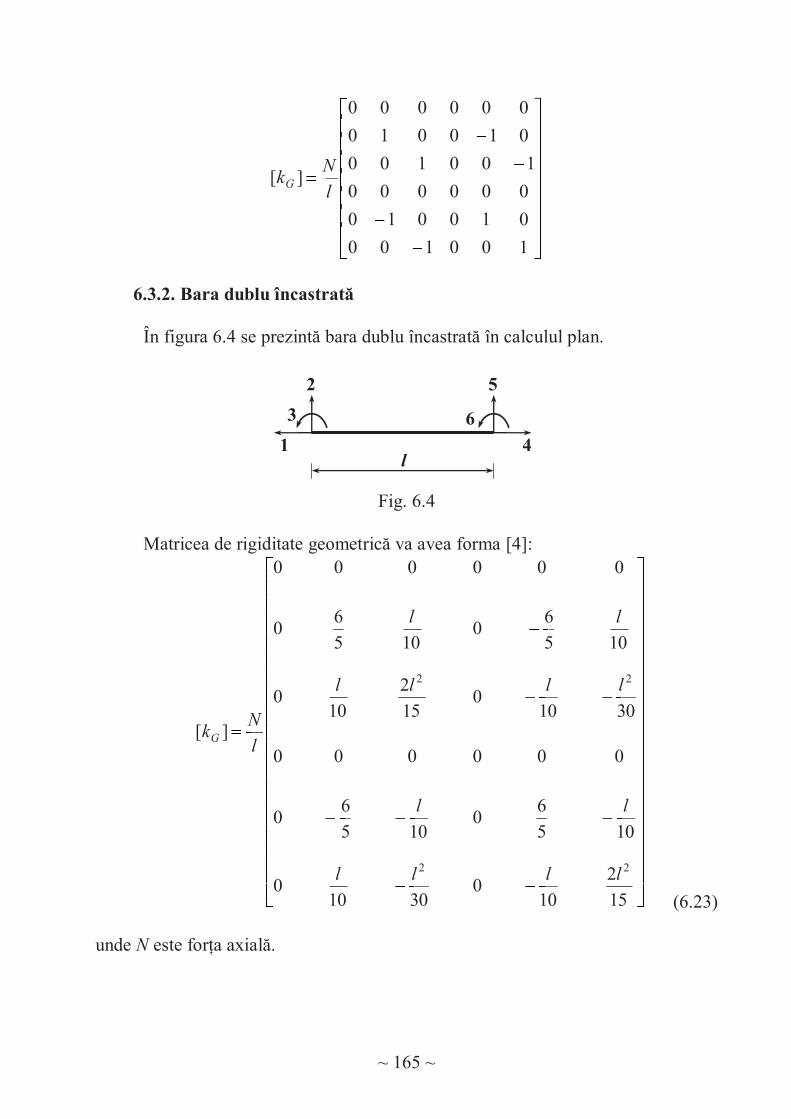
~ 165 ~
100100
010010
000000
100100
010010
000000
][l
NkG
6.3.2. Bara dublu încastrată
În figura 6.4 se prezintă bara dublu încastrată în calculul plan.
Fig. 6.4
Matricea de rigiditate geometrică va avea forma [4]:
15
2
100
30100
105
60
105
60
000000
30100
15
2
100
105
60
105
60
000000
][
22
22
llll
ll
llll
ll
l
NkG
(6.23)
unde N este forţa axială.
1
3
4
5
6
2
l
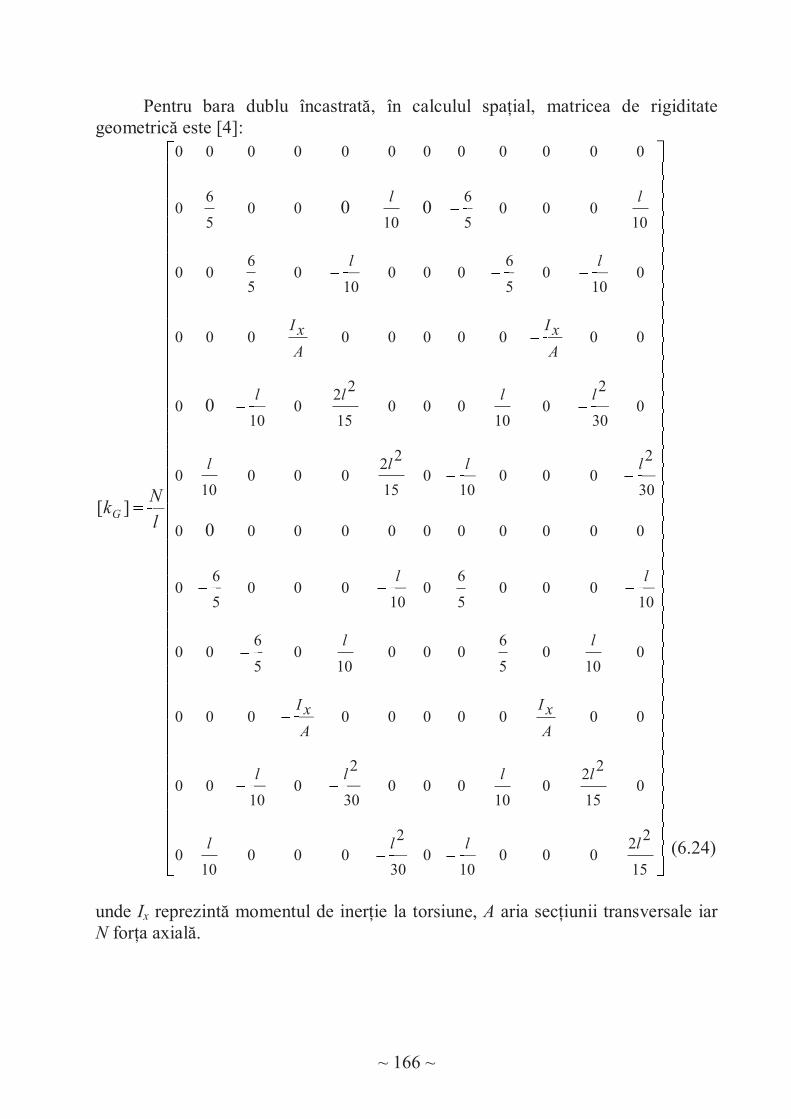
~ 166 ~
Pentru bara dublu încastrată, în calculul spaţial, matricea de rigiditate geometrică este [4]:
15
22000
100
30
2000
100
015
220
10000
30
20
1000
0000000000
010
05
6000
100
5
600
10000
5
60
10000
5
60
00000000000
30
2000
100
15
22000
100
030
20
10000
15
220
100
0000000000
010
05
6000
100
5
600
10000
5
6
1000
5
60
000000000000
0
0
00
][
llll
llll
A
xI
A
xI
ll
ll
llll
llll
A
xI
A
xI
ll
ll
l
NkG
(6.24)
unde Ix reprezintă momentul de inerţie la torsiune, A aria secţiunii transversale iar N forţa axială.
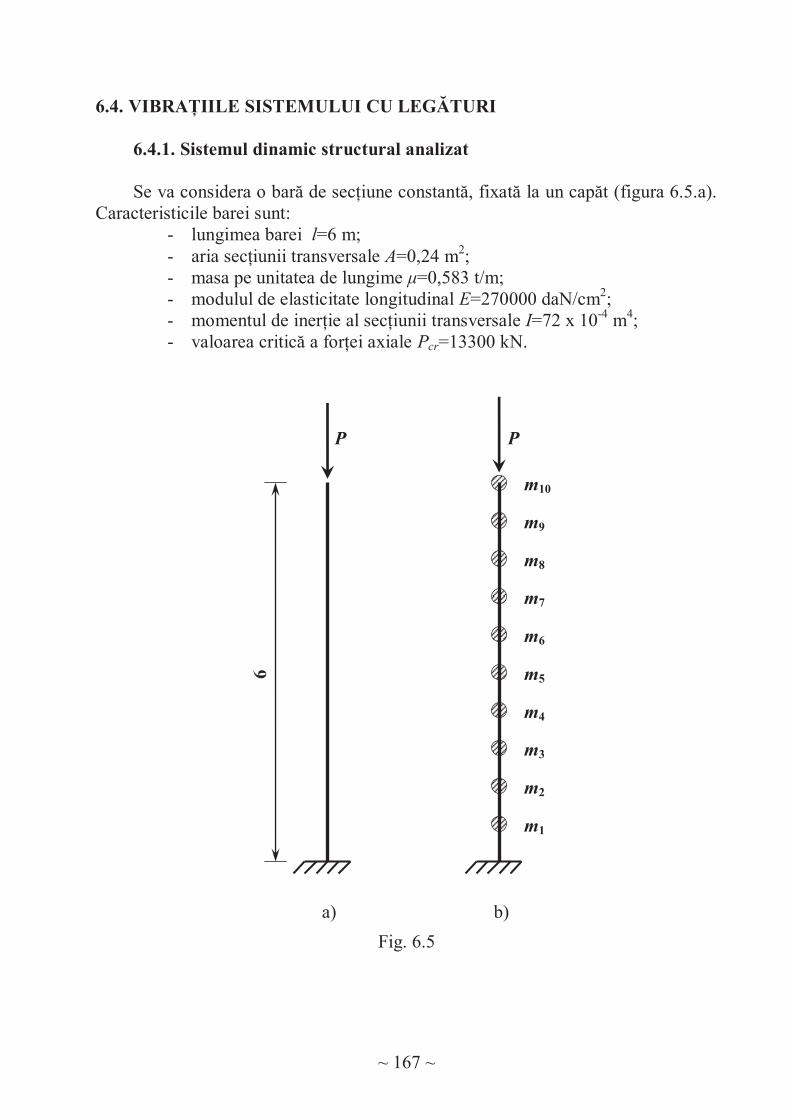
~ 167 ~
6.4. VIBRAŢIILE SISTEMULUI CU LEGĂTURI
6.4.1. Sistemul dinamic structural analizat
Se va considera o bară de secţiune constantă, fixată la un capăt (figura 6.5.a). Caracteristicile barei sunt:
- lungimea barei l=6 m; - aria secţiunii transversale A=0,24 m2; - masa pe unitatea de lungime μ=0,583 t/m; - modulul de elasticitate longitudinal E=270000 daN/cm2; - momentul de inerţie al secţiunii transversale I=72 x 10-4 m4; - valoarea critică a forţei axiale Pcr=13300 kN.
Fig. 6.5
P
a)
6
P
b)
m1
m6
m2
m3
m4
m5
m7
m8
m9
m10
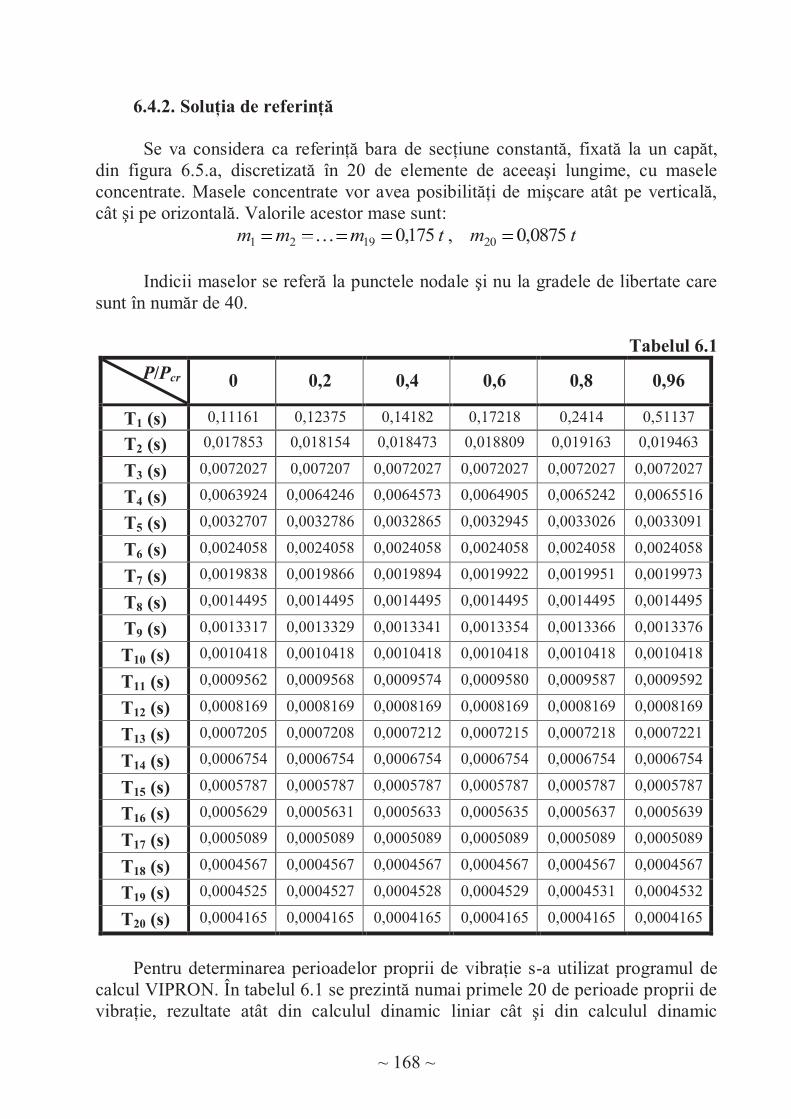
~ 168 ~
6.4.2. Soluţia de referinţă
Se va considera ca referinţă bara de secţiune constantă, fixată la un capăt, din figura 6.5.a, discretizată în 20 de elemente de aceeaşi lungime, cu masele concentrate. Masele concentrate vor avea posibilităţi de mişcare atât pe verticală, cât şi pe orizontală. Valorile acestor mase sunt:
tmtmmm 0875,0,175,0 201921 00mm K
Indicii maselor se referă la punctele nodale şi nu la gradele de libertate care sunt în număr de 40.
Tabelul 6.1
P/Pcr
0 0,2 0,4 0,6 0,8 0,96
T1 (s) 0,11161 0,12375 0,14182 0,17218 0,2414 0,51137
T2 (s) 0,017853 0,018154 0,018473 0,018809 0,019163 0,019463
T3 (s) 0,0072027 0,007207 0,0072027 0,0072027 0,0072027 0,0072027
T4 (s) 0,0063924 0,0064246 0,0064573 0,0064905 0,0065242 0,0065516
T5 (s) 0,0032707 0,0032786 0,0032865 0,0032945 0,0033026 0,0033091
T6 (s) 0,0024058 0,0024058 0,0024058 0,0024058 0,0024058 0,0024058
T7 (s) 0,0019838 0,0019866 0,0019894 0,0019922 0,0019951 0,0019973
T8 (s) 0,0014495 0,0014495 0,0014495 0,0014495 0,0014495 0,0014495
T9 (s) 0,0013317 0,0013329 0,0013341 0,0013354 0,0013366 0,0013376
T10 (s) 0,0010418 0,0010418 0,0010418 0,0010418 0,0010418 0,0010418
T11 (s) 0,0009562 0,0009568 0,0009574 0,0009580 0,0009587 0,0009592
T12 (s) 0,0008169 0,0008169 0,0008169 0,0008169 0,0008169 0,0008169
T13 (s) 0,0007205 0,0007208 0,0007212 0,0007215 0,0007218 0,0007221
T14 (s) 0,0006754 0,0006754 0,0006754 0,0006754 0,0006754 0,0006754
T15 (s) 0,0005787 0,0005787 0,0005787 0,0005787 0,0005787 0,0005787
T16 (s) 0,0005629 0,0005631 0,0005633 0,0005635 0,0005637 0,0005639
T17 (s) 0,0005089 0,0005089 0,0005089 0,0005089 0,0005089 0,0005089
T18 (s) 0,0004567 0,0004567 0,0004567 0,0004567 0,0004567 0,0004567
T19 (s) 0,0004525 0,0004527 0,0004528 0,0004529 0,0004531 0,0004532
T20 (s) 0,0004165 0,0004165 0,0004165 0,0004165 0,0004165 0,0004165
Pentru determinarea perioadelor proprii de vibraţie s-a utilizat programul de
calcul VIPRON. În tabelul 6.1 se prezintă numai primele 20 de perioade proprii de vibraţie, rezultate atât din calculul dinamic liniar cât şi din calculul dinamic
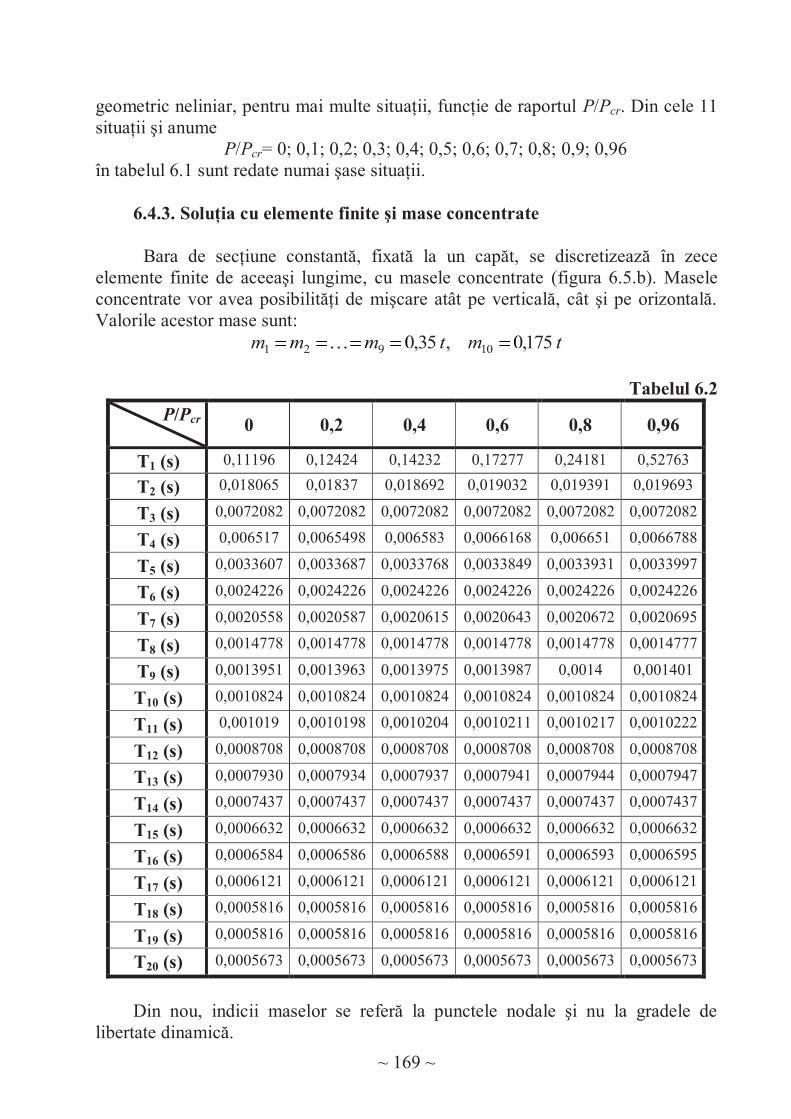
~ 169 ~
geometric neliniar, pentru mai multe situaţii, funcţie de raportul P/Pcr. Din cele 11 situaţii şi anume
P/Pcr= 0; 0,1; 0,2; 0,3; 0,4; 0,5; 0,6; 0,7; 0,8; 0,9; 0,96 în tabelul 6.1 sunt redate numai şase situaţii. 6.4.3. Soluţia cu elemente finite şi mase concentrate Bara de secţiune constantă, fixată la un capăt, se discretizează în zece elemente finite de aceeaşi lungime, cu masele concentrate (figura 6.5.b). Masele concentrate vor avea posibilităţi de mişcare atât pe verticală, cât şi pe orizontală. Valorile acestor mase sunt:
tmtmmm 175,0,35,0 10921 00mm K
Tabelul 6.2
P/Pcr
0 0,2 0,4 0,6 0,8 0,96
T1 (s) 0,11196 0,12424 0,14232 0,17277 0,24181 0,52763
T2 (s) 0,018065 0,01837 0,018692 0,019032 0,019391 0,019693
T3 (s) 0,0072082 0,0072082 0,0072082 0,0072082 0,0072082 0,0072082
T4 (s) 0,006517 0,0065498 0,006583 0,0066168 0,006651 0,0066788
T5 (s) 0,0033607 0,0033687 0,0033768 0,0033849 0,0033931 0,0033997
T6 (s) 0,0024226 0,0024226 0,0024226 0,0024226 0,0024226 0,0024226
T7 (s) 0,0020558 0,0020587 0,0020615 0,0020643 0,0020672 0,0020695
T8 (s) 0,0014778 0,0014778 0,0014778 0,0014778 0,0014778 0,0014777
T9 (s) 0,0013951 0,0013963 0,0013975 0,0013987 0,0014 0,001401
T10 (s) 0,0010824 0,0010824 0,0010824 0,0010824 0,0010824 0,0010824
T11 (s) 0,001019 0,0010198 0,0010204 0,0010211 0,0010217 0,0010222
T12 (s) 0,0008708 0,0008708 0,0008708 0,0008708 0,0008708 0,0008708
T13 (s) 0,0007930 0,0007934 0,0007937 0,0007941 0,0007944 0,0007947
T14 (s) 0,0007437 0,0007437 0,0007437 0,0007437 0,0007437 0,0007437
T15 (s) 0,0006632 0,0006632 0,0006632 0,0006632 0,0006632 0,0006632
T16 (s) 0,0006584 0,0006586 0,0006588 0,0006591 0,0006593 0,0006595
T17 (s) 0,0006121 0,0006121 0,0006121 0,0006121 0,0006121 0,0006121
T18 (s) 0,0005816 0,0005816 0,0005816 0,0005816 0,0005816 0,0005816
T19 (s) 0,0005816 0,0005816 0,0005816 0,0005816 0,0005816 0,0005816
T20 (s) 0,0005673 0,0005673 0,0005673 0,0005673 0,0005673 0,0005673
Din nou, indicii maselor se referă la punctele nodale şi nu la gradele de
libertate dinamică.
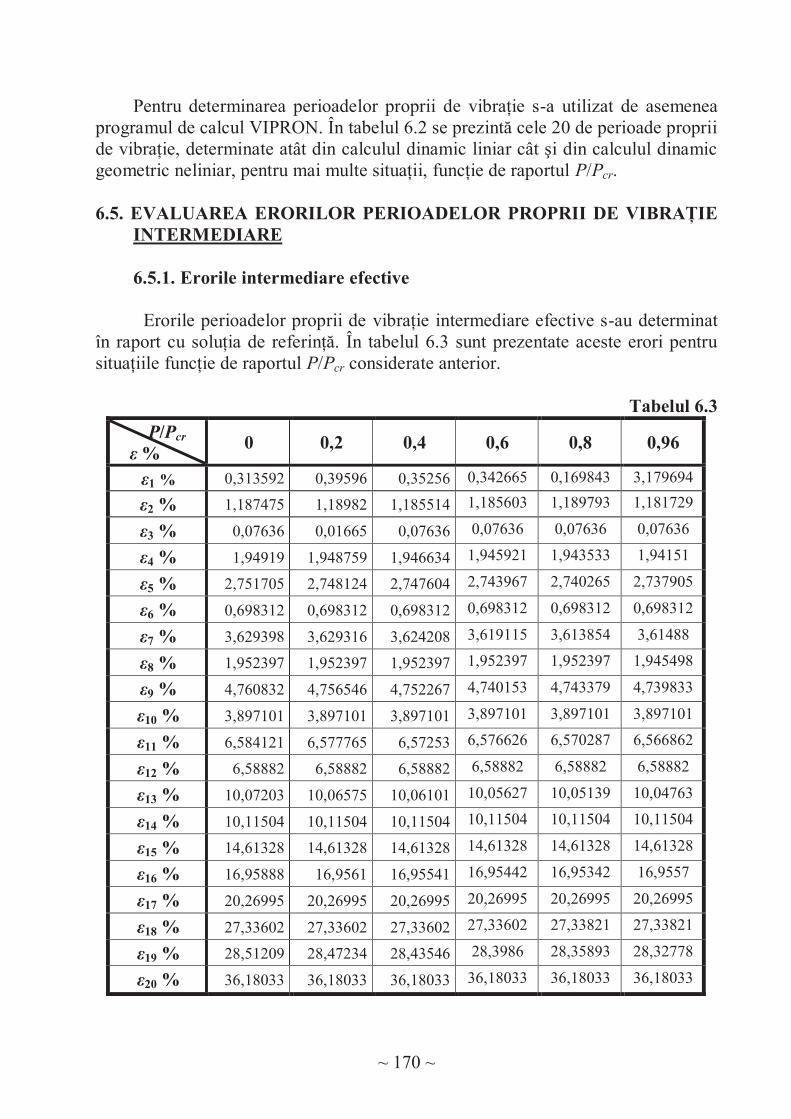
~ 170 ~
Pentru determinarea perioadelor proprii de vibraţie s-a utilizat de asemenea programul de calcul VIPRON. În tabelul 6.2 se prezintă cele 20 de perioade proprii de vibraţie, determinate atât din calculul dinamic liniar cât şi din calculul dinamic geometric neliniar, pentru mai multe situaţii, funcţie de raportul P/Pcr. 6.5. EVALUAREA ERORILOR PERIOADELOR PROPRII DE VIBRAŢIE
INTERMEDIARE
6.5.1. Erorile intermediare efective
Erorile perioadelor proprii de vibraţie intermediare efective s-au determinat în raport cu soluţia de referinţă. În tabelul 6.3 sunt prezentate aceste erori pentru situaţiile funcţie de raportul P/Pcr considerate anterior.
Tabelul 6.3
P/Pcr
ε % 0 0,2 0,4 0,6 0,8 0,96
ε1 % 0,313592 0,39596 0,35256 0,342665 0,169843 3,179694
ε2 % 1,187475 1,18982 1,185514 1,185603 1,189793 1,181729
ε3 % 0,07636 0,01665 0,07636 0,07636 0,07636 0,07636
ε4 % 1,94919 1,948759 1,946634 1,945921 1,943533 1,94151
ε5 % 2,751705 2,748124 2,747604 2,743967 2,740265 2,737905
ε6 % 0,698312 0,698312 0,698312 0,698312 0,698312 0,698312
ε7 % 3,629398 3,629316 3,624208 3,619115 3,613854 3,61488
ε8 % 1,952397 1,952397 1,952397 1,952397 1,952397 1,945498
ε9 % 4,760832 4,756546 4,752267 4,740153 4,743379 4,739833
ε10 % 3,897101 3,897101 3,897101 3,897101 3,897101 3,897101
ε11 % 6,584121 6,577765 6,57253 6,576626 6,570287 6,566862
ε12 % 6,58882 6,58882 6,58882 6,58882 6,58882 6,58882
ε13 % 10,07203 10,06575 10,06101 10,05627 10,05139 10,04763
ε14 % 10,11504 10,11504 10,11504 10,11504 10,11504 10,11504
ε15 % 14,61328 14,61328 14,61328 14,61328 14,61328 14,61328
ε16 % 16,95888 16,9561 16,95541 16,95442 16,95342 16,9557
ε17 % 20,26995 20,26995 20,26995 20,26995 20,26995 20,26995
ε18 % 27,33602 27,33602 27,33602 27,33602 27,33821 27,33821
ε19 % 28,51209 28,47234 28,43546 28,3986 28,35893 28,32778
ε20 % 36,18033 36,18033 36,18033 36,18033 36,18033 36,18033
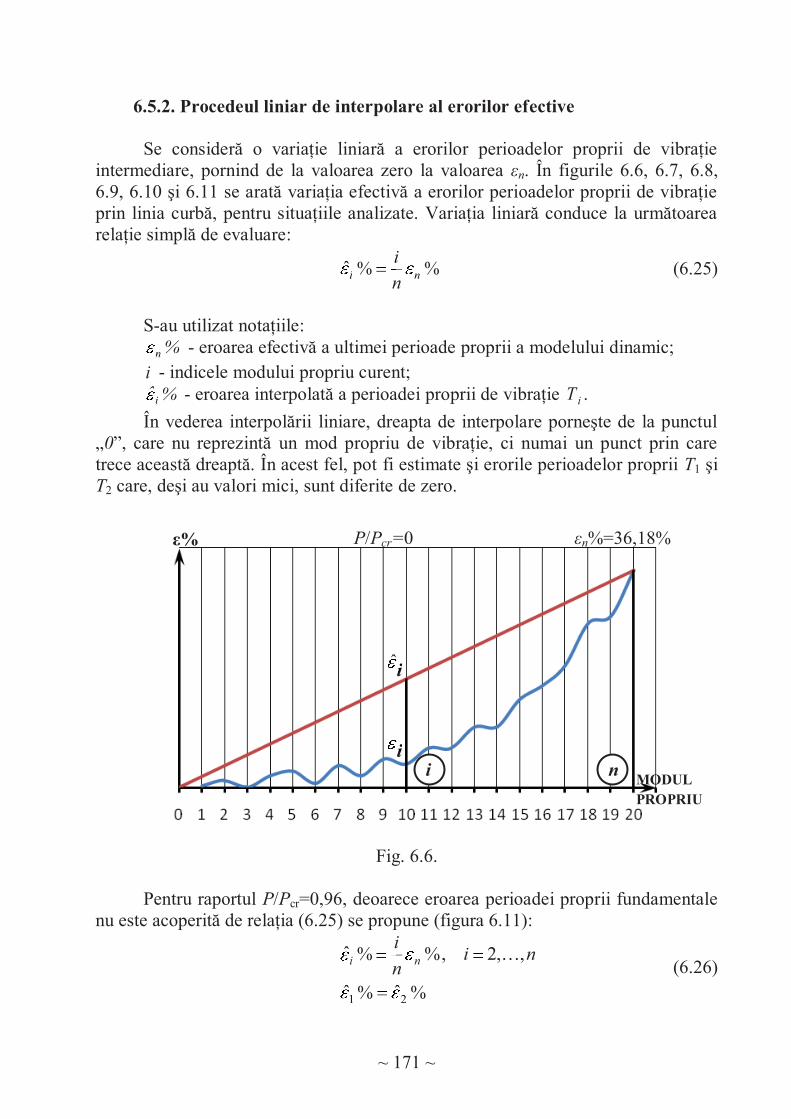
~ 171 ~
6.5.2. Procedeul liniar de interpolare al erorilor efective
Se consideră o variaţie liniară a erorilor perioadelor proprii de vibraţie intermediare, pornind de la valoarea zero la valoarea εn. În figurile 6.6, 6.7, 6.8, 6.9, 6.10 şi 6.11 se arată variaţia efectivă a erorilor perioadelor proprii de vibraţie prin linia curbă, pentru situaţiile analizate. Variaţia liniară conduce la următoarea relaţie simplă de evaluare:
%%ˆni
n
in
ˆi
i (6.25)
S-au utilizat notaţiile:
%nn - eroarea efectivă a ultimei perioade proprii a modelului dinamic; i - indicele modului propriu curent;
%ˆi %ˆi - eroarea interpolată a perioadei proprii de vibraţie iT .
În vederea interpolării liniare, dreapta de interpolare porneşte de la punctul „0”, care nu reprezintă un mod propriu de vibraţie, ci numai un punct prin care trece această dreaptă. În acest fel, pot fi estimate şi erorile perioadelor proprii T1 şi T2 care, deşi au valori mici, sunt diferite de zero.
Fig. 6.6.
Pentru raportul P/Pcr=0,96, deoarece eroarea perioadei proprii fundamentale nu este acoperită de relaţia (6.25) se propune (figura 6.11):
%ˆ%ˆ
,,2,%%ˆ
21 ˆ21̂
ˆ
ˆ
2 nin
ini K
(6.26)
εn%=36,18%
MODUL
PROPRIU
ε%
iiˆ
ii
n i
P/Pcr=0
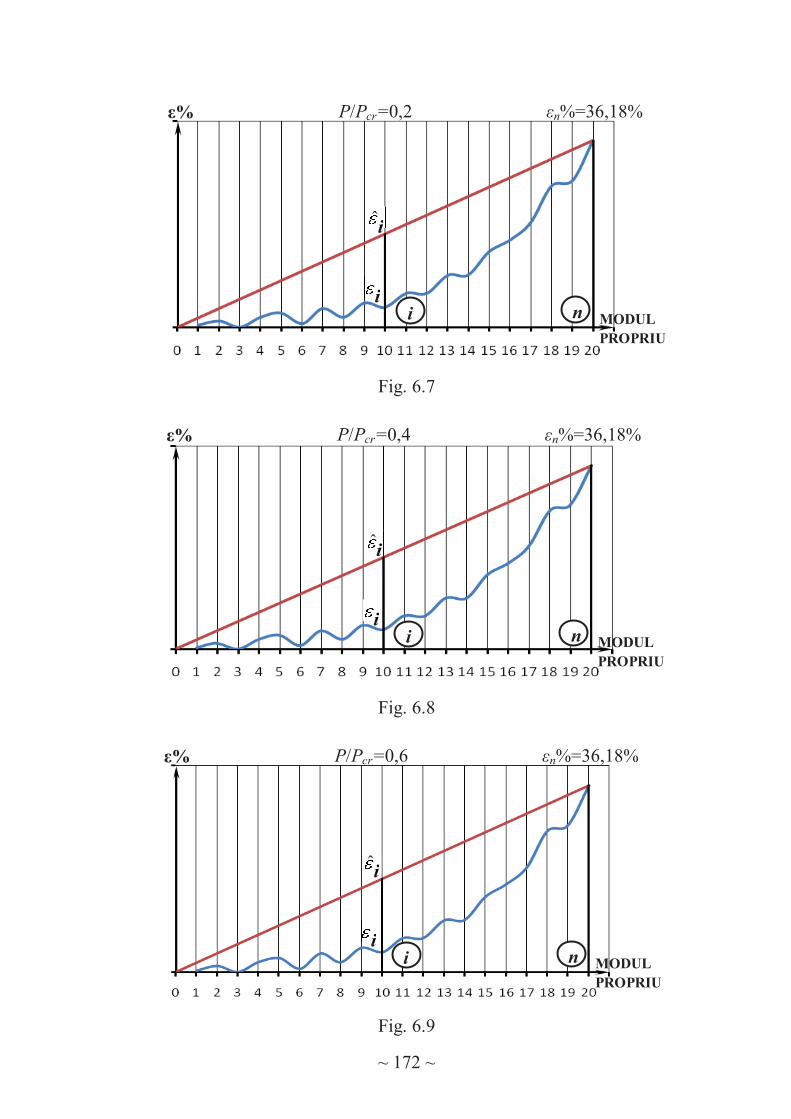
~ 172 ~
Fig. 6.7
Fig. 6.8
Fig. 6.9
εn%=36,18%
MODUL
PROPRIU
ε%
iiˆ
iin i
P/Pcr=0,6
εn%=36,18%
MODUL
PROPRIU
ε%
iiˆ
iin i
P/Pcr=0,4
εn%=36,18%
MODUL
PROPRIU
ε%
iiˆ
iin i
P/Pcr=0,2
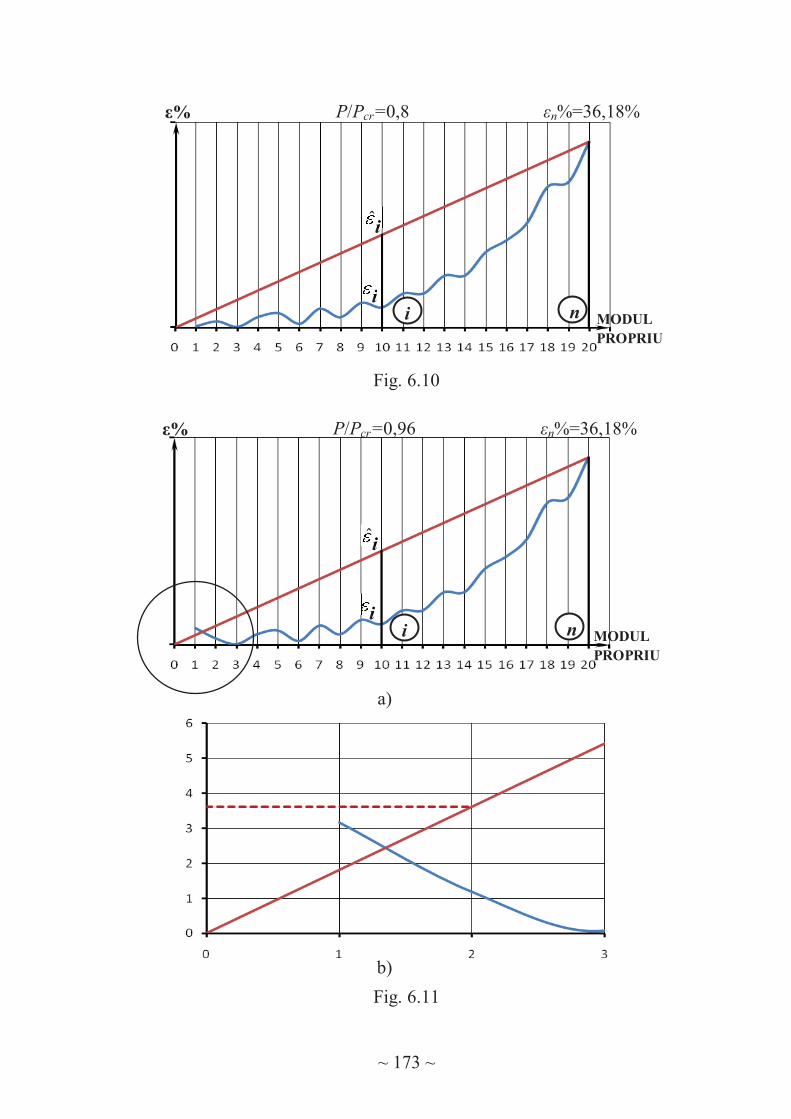
~ 173 ~
Fig. 6.10
Fig. 6.11
εn%=36,18%
MODUL
PROPRIU
ε%
iiˆ
iin i
P/Pcr=0,96
a)
b)
εn%=36,18%
MODUL
PROPRIU
ε%
iiˆ
iin i
P/Pcr=0,8
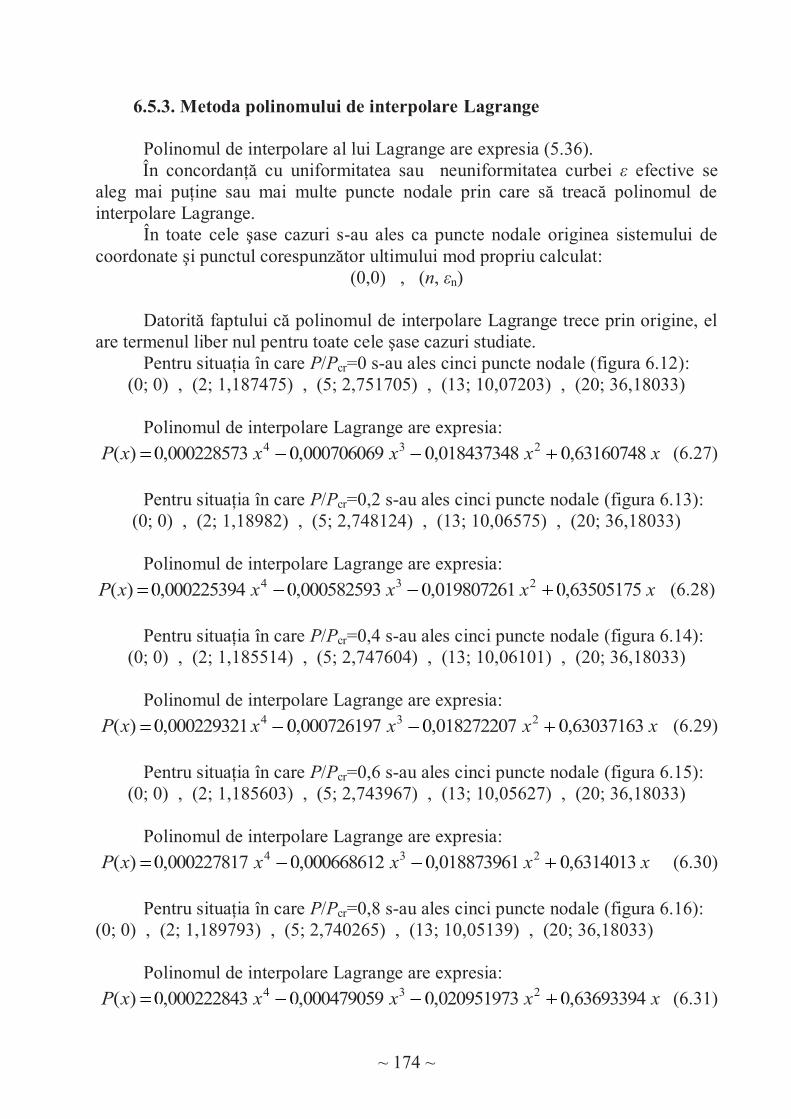
~ 174 ~
6.5.3. Metoda polinomului de interpolare Lagrange
Polinomul de interpolare al lui Lagrange are expresia (5.36). În concordanţă cu uniformitatea sau neuniformitatea curbei ε efective se
aleg mai puţine sau mai multe puncte nodale prin care să treacă polinomul de interpolare Lagrange. În toate cele şase cazuri s-au ales ca puncte nodale originea sistemului de coordonate şi punctul corespunzător ultimului mod propriu calculat:
(0,0) , (n, εn) Datorită faptului că polinomul de interpolare Lagrange trece prin origine, el are termenul liber nul pentru toate cele şase cazuri studiate. Pentru situaţia în care P/Pcr=0 s-au ales cinci puncte nodale (figura 6.12):
(0; 0) , (2; 1,187475) , (5; 2,751705) , (13; 10,07203) , (20; 36,18033)
Polinomul de interpolare Lagrange are expresia:
xxxxxP 63160748,0018437348,0000706069,0000228573,0)( 234 0000 (6.27)
Pentru situaţia în care P/Pcr=0,2 s-au ales cinci puncte nodale (figura 6.13): (0; 0) , (2; 1,18982) , (5; 2,748124) , (13; 10,06575) , (20; 36,18033)
Polinomul de interpolare Lagrange are expresia:
xxxxxP 63505175,0019807261,0000582593,0000225394,0)( 234 0000 (6.28)
Pentru situaţia în care P/Pcr=0,4 s-au ales cinci puncte nodale (figura 6.14): (0; 0) , (2; 1,185514) , (5; 2,747604) , (13; 10,06101) , (20; 36,18033)
Polinomul de interpolare Lagrange are expresia:
xxxxxP 63037163,0018272207,0000726197,0000229321,0)( 234 0000 (6.29)
Pentru situaţia în care P/Pcr=0,6 s-au ales cinci puncte nodale (figura 6.15): (0; 0) , (2; 1,185603) , (5; 2,743967) , (13; 10,05627) , (20; 36,18033)
Polinomul de interpolare Lagrange are expresia:
xxxxxP 6314013,0018873961,0000668612,0000227817,0)( 234 0000 (6.30)
Pentru situaţia în care P/Pcr=0,8 s-au ales cinci puncte nodale (figura 6.16): (0; 0) , (2; 1,189793) , (5; 2,740265) , (13; 10,05139) , (20; 36,18033) Polinomul de interpolare Lagrange are expresia:
xxxxxP 63693394,0020951973,0000479059,0000222843,0)( 234 0000 (6.31)
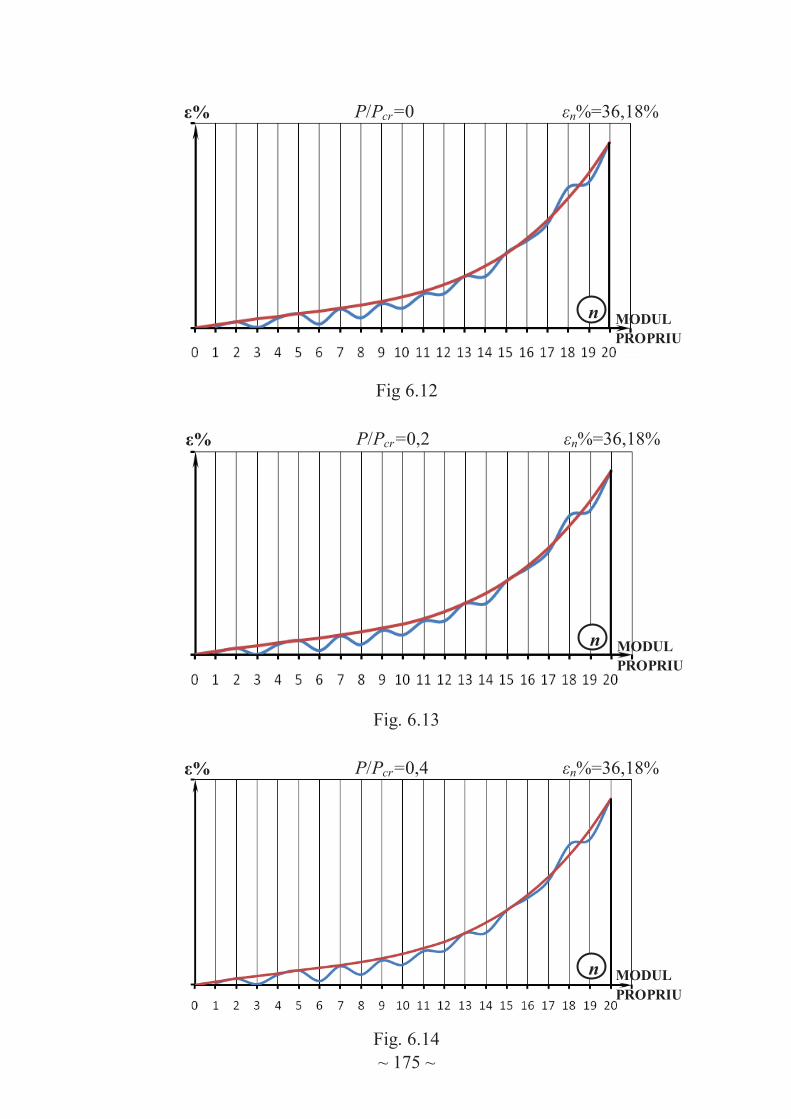
~ 175 ~
Fig 6.12
Fig. 6.13
Fig. 6.14
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,4
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,2
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0
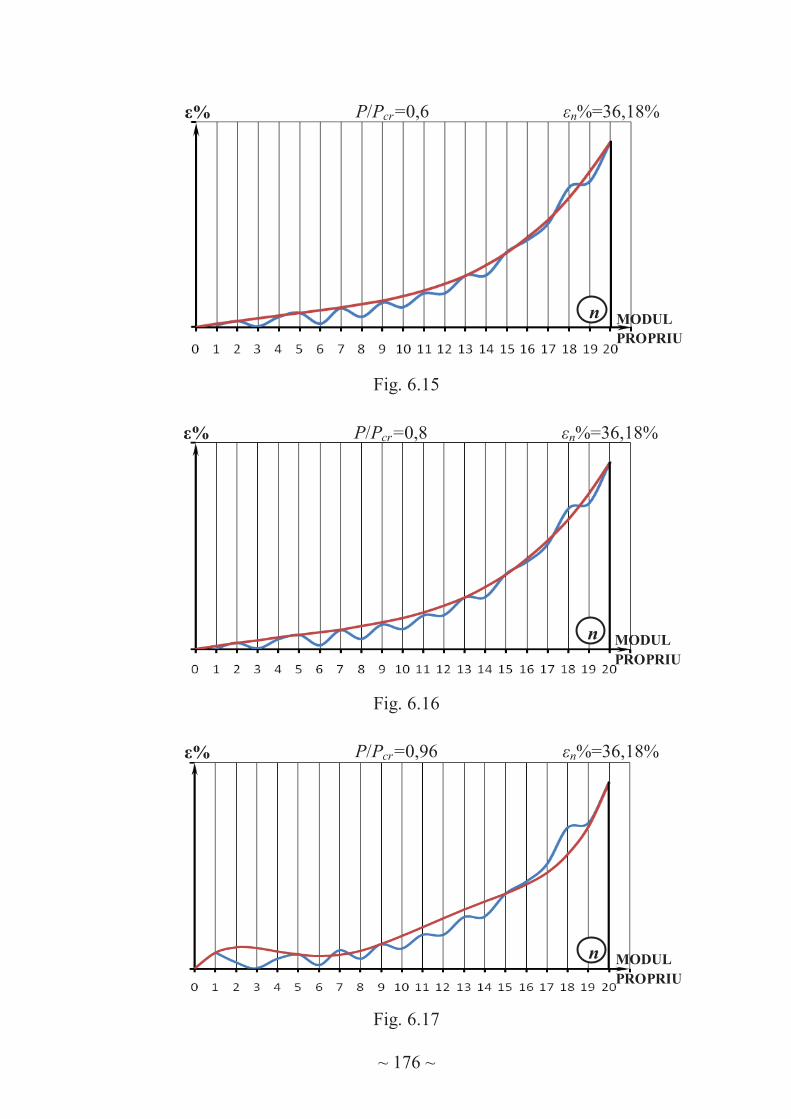
~ 176 ~
Fig. 6.15
Fig. 6.16
Fig. 6.17
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,96
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,8
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,6

~ 177 ~
Pentru situaţia în care P/Pcr=0,96 s-au ales şase puncte nodale (figura 6.17): (0; 0) , ( 1 ; 3,179694) , ( 5 ; 2,737905) ,
(9; 4,739833) , (15; 14,61328) , (20; 36,18033). Polinomul de interpolare Lagrange are expresia:
xx
xxxxP
670133046,4716597592,1
239484855,0013604515,0000278206,0)(2
345
41
000 (6.32)
În figurile 6.12, 6.13, 6.14, 6.15, 6.16 şi 6.17 curba ε efectivă este reprezentată prin linie de culoare albastră, iar polinomul de interpolare Lagrange prin linie roşie.
6.5.4. Procedeul funcţiei putere
Funcţia de interpolare se alege de forma b
i ia ia%i % (6.33)
astfel încât să fie acoperitoare pentru toate cele n valori ale erorilor perioadelor proprii de vibraţie. În relaţia (6.33) i este indicele modului propriu de vibraţie. Cele două constante se determină din condiţiile ca:
în origine funcţia εi% să aibă valoarea ε1%; pentru i=n funcţia εi% să aibă valoarea εn%.
Pentru P/Pcr=0, prima condiţie conduce la:
aa3136,0
A doua condiţie conduce la: ba 2016,36 2a
de unde
195,120lg
8664,35lg,1
lgb
adică 195,13136,0% ii i0%i (6.34)
Relaţia (6.34) poate fi folosită şi pentru rapoartele P/Pcr=0,2; 0,4; 0,6 şi 0,8 , fiind acoperitoare şi în aceste cazuri. Pentru P/Pcr=0,96, relaţia (6.33) devine:
167,118,3% ii i3%i (6.35)
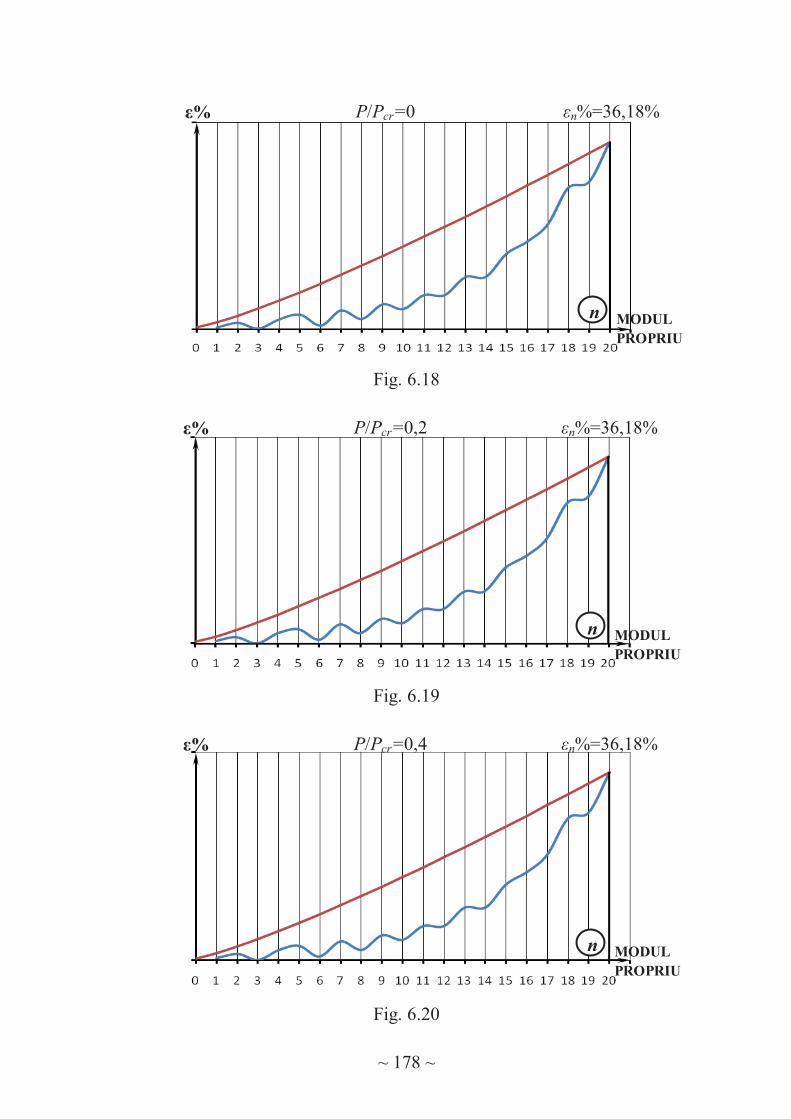
~ 178 ~
Fig. 6.18
Fig. 6.19
Fig. 6.20
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,4
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,2
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0
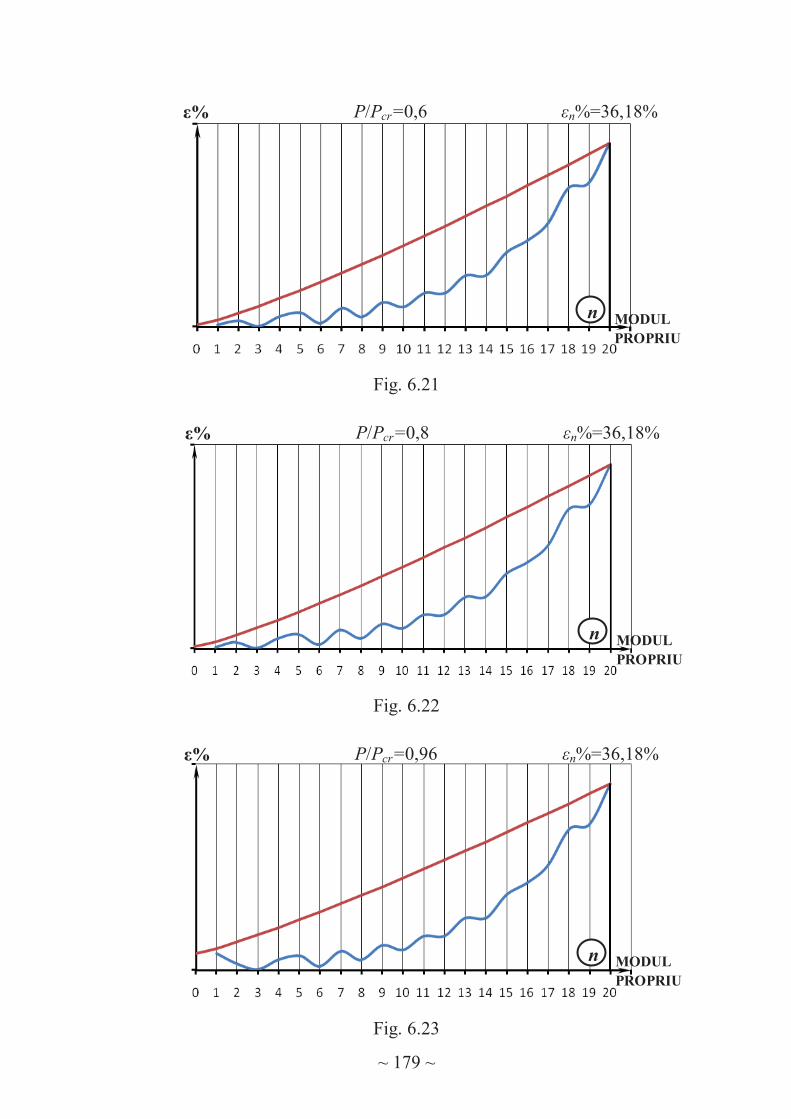
~ 179 ~
Fig. 6.21
Fig. 6.22
Fig. 6.23
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,96
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,8
εn%=36,18%
MODUL
PROPRIU
ε%
n
P/Pcr=0,6
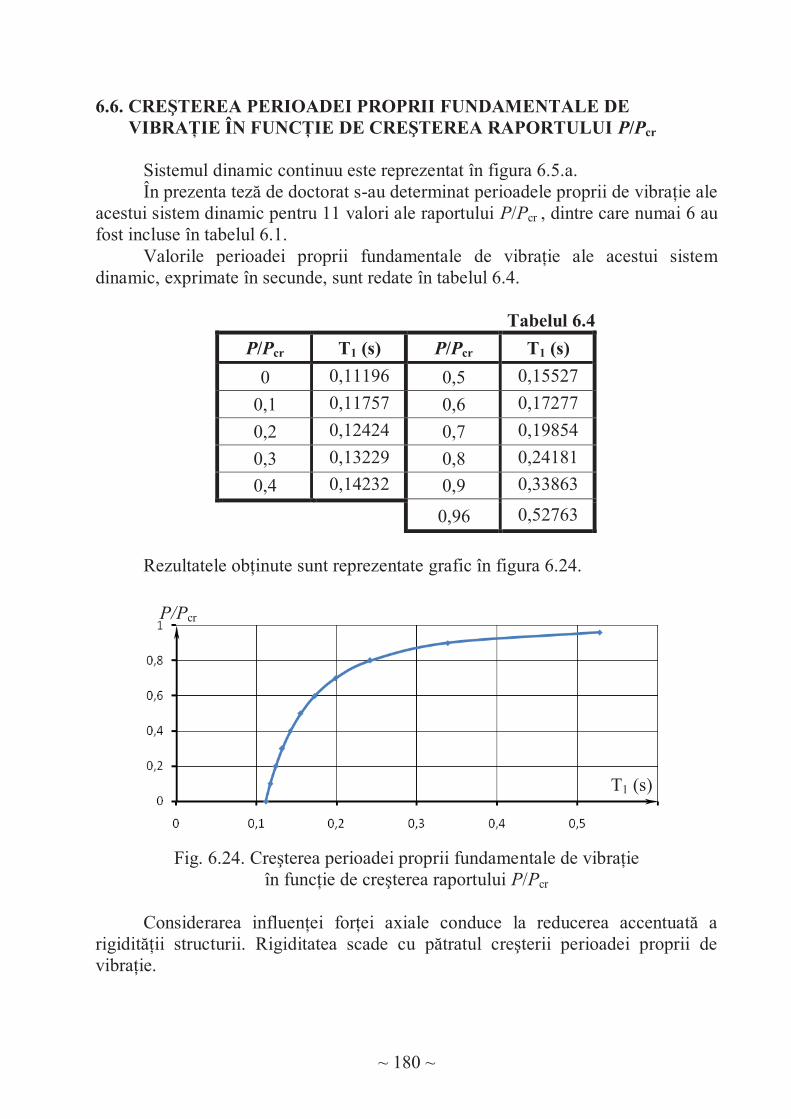
~ 180 ~
6.6. CREŞTEREA PERIOADEI PROPRII FUNDAMENTALE DE VIBRAŢIE ÎN FUNCŢIE DE CREŞTEREA RAPORTULUI P/Pcr
Sistemul dinamic continuu este reprezentat în figura 6.5.a. În prezenta teză de doctorat s-au determinat perioadele proprii de vibraţie ale acestui sistem dinamic pentru 11 valori ale raportului P/Pcr , dintre care numai 6 au fost incluse în tabelul 6.1.
Valorile perioadei proprii fundamentale de vibraţie ale acestui sistem dinamic, exprimate în secunde, sunt redate în tabelul 6.4.
Tabelul 6.4
P/Pcr T1 (s) P/Pcr T1 (s)
0 0,11196 0,5 0,15527
0,1 0,11757 0,6 0,17277
0,2 0,12424 0,7 0,19854
0,3 0,13229 0,8 0,24181
0,4 0,14232 0,9 0,33863
0,96 0,52763
Rezultatele obţinute sunt reprezentate grafic în figura 6.24.
Fig. 6.24. Creşterea perioadei proprii fundamentale de vibraţie
în funcţie de creşterea raportului P/Pcr
Considerarea influenţei forţei axiale conduce la reducerea accentuată a rigidităţii structurii. Rigiditatea scade cu pătratul creşterii perioadei proprii de vibraţie.
P/Pcr
T1 (s)
~ 181 ~
6.7. CONCLUZII
În calculul dinamic geometric neliniar au fost parcurse etapele de studiu din calculul dinamic liniar. În funcţie de diferite rapoarte P/Pcr , s-au determinat erorile perioadelor proprii de vibraţie. Pentru interpolarea erorilor acestora s-au utilizat următoarele procedee:
procedeul liniar de interpolare; metoda polinomului de interpolare Lagrange; procedeul funcţiei putere.
În calculul dinamic geometric neliniar, aceste procedee se aplică într-un mod
diferit faţă de calculul dinamic liniar, datorită mai ales modificării semnificative a perioadei proprii fundamentale de vibraţie.
Au fost propuse expresii adecvate comportării dinamice geometric neliniare atât în procedeul liniar, cât şi în procedeul funcţiei putere şi în metoda polinomului de interpolare Lagrange.
De asemenea, a fost studiată creşterea perioadei proprii fundamentale de vibraţie în funcţie de creşterea raportului P/Pcr şi implicit scăderea accentuată a rigidităţii structurii.
În acest capitol se generalizează studiul comportării dinamice geometric neliniare de la modul propriu fundamental de vibraţie la toate modurile proprii de vibraţie ale modelului dinamic analizat.
~ 182 ~
CAPITOLUL 7
CONSIDERAŢII FINALE
7.1. CONTRIBUŢII PERSONALE
Principalele contribuţii personale sunt:
1. Introducerea factorului de amplificare dinamică pentru cuantificarea interacţiunii dintre modurile proprii de vibraţie. Astfel, pentru modurile proprii înalte, pulsaţiile de vibraţie din modurile proprii joase reprezintă “pulsaţii ale acţiunii” şi factorul de amplificare dinamică este supraunitar. Pentru modurile proprii inferioare “pulsaţiile acţiunii” sunt pulsaţiile de vibraţie din modurile proprii superioare iar factorul de amplificare dinamică este subunitar.
2. Recomandările privind modelarea sistemelor dinamice structurale cu rigidităţi disproporţionate. Se recomandă ca părţile deosebit de flexibile ale sistemului dinamic structural să nu fie considerate în analiză dacă este posibil. În caz contrar, reţeaua de elemente finite trebuie să fie îndesită în aceste zone flexibile.
3. Punerea în evidenţă a faptului că o creştere a maselor şi încărcărilor dinamice într-o zonă a structurii conduce la o “flexibilizare dinamică” a acelei zone şi reţeaua de elemente finite trebuie îndesită.
4. Efectuarea a două studii de caz privind influenţa gradului de rafinare al discretizării asupra modurilor proprii de vibraţie şi asupra răspunsului dinamic. O concluzie importantă este aceea că eroarea perioadei proprii de vibraţie se regăseşte amplificată de câteva ori în răspunsul dinamic la acţiunea seismică.
5. Punerea în evidenţă a următoarei proprietăţi a sistemelor dinamice uniforme
libere, modelate cu elemente finite şi anume: eroarea celei mai înalte pulsaţii proprii a sistemului coincide cu eroarea celei mai înalte pulsaţii proprii a
unui singur element finit sau este mai mică decât aceasta.
6. Demonstrarea proprietăţii sistemelor dinamice uniforme libere, modelate cu elemente finite, pentru vibraţiile axiale cu matricea maselor “consecventă”.
7. Demonstrarea proprietăţii sistemelor dinamice uniforme libere, modelate cu elemente finite, pentru vibraţiile de torsiune cu caracteristici inerţiale concentrate şi cu matricea inerţială “consecventă”.

~ 183 ~
8. Studiul proprietăţii sistemelor dinamice uniforme libere, modelate cu elemente finite, pentru vibraţiile transversale cu matricea maselor
“consecventă” şi diagonală.
9. Aplicarea practică a proprietăţii sistemelor dinamice uniforme modelate cu
elemente finite la structurile cu legături.
10. Studiul proprietăţii sistemelor uniforme modelate cu elemente finite în
calculul dinamic geometric neliniar.
11. Evaluarea erorilor pulsaţiilor proprii intermediare în funcţie de eroarea celei mai înalte pulsaţii a modelului dinamic.
12. Propunerea unei formule de interpolare liniară a erorilor.
13. Aplicarea polinomului de interpolare Lagrange pentru studiul erorilor
intermediare.
14. Propunerea funcţiei putere pentru interpolarea erorilor intermediare.
15. Propunerea procedeului liniar de interpolare, a metodei polinomului de
interpolare Lagrange şi a funcţiei putere în calculul dinamic geometric neliniar,
16. Asocierea dintre amplificarea erorilor pulsaţiilor proprii în răspunsul dinamic la acţiuni armonice şi a răspunsului dinamic la acţiunea seismică.
7.2. VALORIFICAREA LUCRĂRII ŞI DIRECŢII VIITOARE DE CERCETARE
Valorificarea tezei de doctorat s-a concretizat prin publicarea a cinci lucrări ştiinţifice dintre care patru ca autor unic. De asemenea, în plenul catedrei de
Mecanică, statică şi dinamica construcţiilor au fost susţinute cele trei referate de doctorat.
Printre direcţiile viitoare de cercetare se numără:
studiul influenţei erorilor vectorilor proprii de vibraţie asupra răspunsului dinamic al sistemelor structurale în calculul liniar;
studiul influenţei erorilor vectorilor proprii de vibraţie asupra răspunsului dinamic al sistemelor structurale în calculul geometric neliniar;
calculul dinamic geometric neliniar cu considerarea variabilităţii maselor sistemului structural concomitent cu variaţia forţelor axiale.
~ 184 ~
BIBLIOGRAFIE
[1]. Albotă, E. F., „Contribuţii teoretice şi aplicative privind fundamentarea
conceptelor şi criteriilor de elaborare a normelor de protecţie antiseismică”,
Teză de doctorat, U.T.C.B., Bucureşti, 2006.
[2]. Bathe, K. J., Wilson, E., „Numerical Methods in Finite Elements Analysis”,
Prentice Hall, Inc., Englewood Cliffs, New Jersey, 1976.
[3]. Bathe, K. J., „Finite Element Procedures in Engineering Analysis”, Prentice-
Hall, Inc., 1982.
[4]. Bănuţ, V., „Calculul neliniar al structurilor”, Editura Tehnică, Bucureşti, 1981.
[5]. Bănuţ, V, „Statica, Stabilitatea şi Dinamica Construcţiilor”, I. C. B., 1988.
[6]. Bănuţ, V., „Calculul dinamic geometric neliniar”, Revista Construcţii, nr. 3-4,
1989.
[7]. Bănuţ, V., „Calculul de ordinul II şi de stabilitate al elementelor şi structurilor
de rezistenţă”, Editura Conspress, Bucureşti, 2005.
[8]. Bănuţ, V., Teodorescu M., „Dinamica construcţiilor”, Editura MATRIXROM,
Bucureşti, 2007.
[9]. Bârsan, G. M., „Dinamica şi Stabilitatea Construcţiilor”, Editura Didactică şi
Pedagogică, Bucureşti, 1979.
[10]. Benaroya, H., „Mechanical Vibration. Analysis, Uncertainties and Control”,
Marcel Dekker, Inc., New York, U.S.A., 2004.
[11]. Chopra, A., „Dynamics of Structures: Theory and Applications to Earthquake
Engineering”, Prentice-Hall, New York, 1995.
[12]. Clough, R. W., „Analysis of Structural Vibrations and Dynamic Response”,
Recent Advances in Matrix Methods of Structural Analysis and Design, Univ.
Alabama, 1971.
[13]. Clough, R. W., Penzien, J., „Dynamics of Structures”, McGraw-Hill, Inc.,
1993.
[14]. Demetriu, S., „Modele aleatoare. Aplicaţii în dinamica structurilor şi
inginerie seismică”, Editura Conspress, Bucureşti, 2002.
~ 185 ~
[15]. Diaconu, A. C., „Bilanţul energetic în timpul acţiunii seismice”, Ed. Soc.
Acad. „Matei – Teiu Botez”, Iaşi, 2007.
[16]. Dragotă, I., Petrehuş, V., „Metode numerice pentru ecuaţii diferenţiale”,
Editura Orizonturi Universitare, Timişoara, 2002.
[17]. Enache, R., „Influenţa fenomenului de torsiune generală asupra răspunsului
seismic al structurilor în cadre”, Teză de doctorat, U.T.C.B., Bucureşti, 2003.
[18]. Felippa, C. A., „Introduction to Finite Element Methods”, ASEN5007,
University of Colorado at Boulder, USA, 2004.
[19]. Fertis, D. G., „Mechanical and Structural Vibrations”, John Wiley & Sons,
Inc., New York, 1995.
[20]. Gavrilă, C., Gavrilă, M. R., „Metode numerice rezolvate în MATHCAD şi
MATLAB/SCILAB”, Editura MATRIXROM, Bucureşti, 2005.
[21]. Hartog, J. P. D., „Mechanical Vibrations”, Dover Publications, Inc., New
York, 1985.
[22]. He, J., Fu, Z. F., „Modal Analysis”, Butterworth-Heinemann, Oxford, 2001.
[23]. Iancovici, M., „Evaluarea performanţei structurale a clădirilor din beton
armat”, Teză de doctorat, U.T.C.B.,2005.
[24]. Ieremia, M., „Elasticitate. Plasticitate. Neliniaritate. Fundamente cu Aplicaţii
la Calculul Structurilor”, Editura PRINTECH, Bucureşti, 1998.
[25]. Ifrim, M., „Analiza dinamică a structurilor şi inginerie seismică”, Editura
Didactică şi Pedagogică, Bucureşti, 1973.
[26]. Ifrim, M., „Dinamica structurilor şi inginerie seismică”, Editura Didactică şi
Pedagogică, Bucureşti, 1984.
[27]. Ifrim, M., Macavei, F., „Modelarea dinamică a structurilor cu elemente de
diferite rigidităţi”, Buletinul Ştiinţific al I.C.B., nr. 1, 1986.
[28]. Ilie, Gh., Fierbinţeanu, V., Stănilă, N., Petrescu, I., „Mecanica
Construcţiilor”, Editura Tehnică, Bucureşti, 1987.
[29]. Kwon, Y.W., Bang, H., „The Finite Element Method Using MATLAB”,
CRC Press LLC, Florida, 2000.
~ 186 ~
[30]. Macavei, F., Ifrim, M., Petrescu, I., Demetriu, S., Vlad, I., Zanfir, M.,
Enache, R., „Criterii şi principii de modelare specifice sistemelor dinamice”,
contract de cercetare ştiinţifică nr. 122/1993, I.C.B.-M.L.P.A.T., Bucureşti,
1993.
[31]. Macavei, F., Vlad, I., Zanfir, M., „Statica, stabilitatea şi dinamica
construcţiilor”, I.C.B., 1993.
[32]. Macavei, F., Poteraşu, V. F., „Complemente de dinamica structurilor”,
Editura Virginia, Iaşi, 1994.
[33]. Macavei, F., „A Minimum Dimension of Dynamic Model for Structures with
Linear Behavior”, Buletinul Ştiinţific al U.T.C.B., nr. 2/1998.
[34]. Macavei, F., Petrescu, I., Stan, O. M., „A Property of Dynamic Systems
Modelled with Finite Element”, Buletinul Ştiinţific al U.T.C.B., nr.1/2001.
[35]. Macavei, F., „Aspecte ale modelării sistemelor dinamice structurale”,
Lucrările simpozionului „Realizări şi perspective în activitatea de construcţii
şi în învăţământul de specialitate”, Iaşi, 2001.
[36]. Macavei, F., Manea, V., Macavei, T., „Condensation of the Stiffness Matrix
and the Hypotheses of the Reciprocal Orthogonality Theorem of the Vibration
Eigenvectors”, Buletinul Ştiinţific al U.T.C.B., nr. 1/2006.
[37]. Macavei, T., „Metode de integrare numerică directă în analiza dinamică a
structurilor”, Lucrare de disertaţie, U.T.C.B., iunie 2003.
[38]. Macavei, T., „The Influence of Stiffnesses and Masses Distribution on the
Dynamic Structural Model”, International Symposium „Thirty Years from the
Romanian Earthquake of March 4, 1977”, Bucharest, 1-3 March, 2007.
[39]. Macavei, T., „Influenţa gradului de rafinare al discretizării în elemente finite
asupra perioadelor proprii de vibraţie determinate prin calcul”, Buletinul
Ştiinţific al U.T.C.B., sub tipar.
[40]. Macavei, T., „Studiu de caz privind influenţa gredului de rafinare al
discretizării asupra răspunsului seismic calculat al unui sistem structural
multietajat”, Buletinul Ştiinţific al U.T.C.B., sub tipar.
[41]. Păltineanu, G., Matei, P., Trandafir, R., „Bazele analizei numerice”, Editura
Printech, Bucureşti, 2001.
~ 187 ~
[42]. Păltineanu, G., Matei P., Macavei, F., Petrehuş, V., „The Influence of
Eigenvalue Perturbation on the Accuracy of the Computed Dynamic
Response to Harmonic Loadings”, The International Conference „Trends and
Challenges in Apllied Mathematics”, Bucharest, June 20-23, 2007.
[43]. Popa, I., „Analiză matematică,.Vol. I. Calcul diferenţial”, Editura
MATRIXROM, Bucureşti, 2000.
[44]. Popa, I., „Analiză matematică. Vol. II. Calcul integral”, Editura
MATRIXROM, Bucureşti, 2001.
[45]. Precupanu, D., „Fundamente de Rezistenţa Construcţiilor”, Editura
Politehnium, Iaşi, 2009.
[46]. Ragab, A. R., Bayoumi, S. E., „Engineering Solid Mechanics. Fundamentals
and Applications”, CRC Press LLC, Florida, U.S.A., 1999.
[47]. Rao, S. S., „Vibration of Continuous Systems”, John Wiley & Sons, Inc.,
Hoboken, New Jersey, 2007.
[48]. Sandi, H., „Elemente de dinamica structurilor”, Editura Tehnică, Bucureşti,
1983.
[49]. Sehmi, N. S., „Large Order Structural Eigenanalysis Techniques Algorithms
for Finite Element Systems”, Ellis Horwood Limited, Chichester, England,
1989.
[50]. Shabana, A. A., „Computational Continuum Mechanics”, Cambridge
University Press, New York, U.S.A., 2008.
[51]. Stematiu, D., Popescu, R., „Calculul structurilor hidrotehnice prin metoda
elementelor finite”, I.C.B., 1986.
[52]. Szolga, V., „Comportarea la solicitări dinamice a unor structuri masive”,
Teză de doctorat, I.C.B., 1988.
[53]. Ştefan, D., „Identificarea dinamică a sistemelor mecanice cu aplicaţii la
calificarea seismică a unor clădiri şi echipamente din componenţa centralelor
nucleare – electrice”, Teză de doctorat, Iaşi, 1995.
[54]. Thomson, W. T., „Theory of Vibration with Applications”, Nelson Thornes
Ltd., United Kingdom, 2003.
[55]. Toma, I., „Matematici speciale”, Editura MATRIXROM, Bucureşti, 2000.
~ 188 ~
[56]. Vlad, I., Macavei, F., „Calculul sistemelor structurale la acţiuni statice”,
Editura Tehnică, Bucureşti, 2002.
[57]. ***, Metodologie pentru stabilirea dimensiunii modelului dinamic uniform de
calcul al construcţiilor, contract U.T.C.B.-M.L.P.A.T., nr. 188/1997.
[58]. ***, Opţiuni de modelare în programul de calcul Ruaumoko, University of
Canterbury, New Zealand, 2001.
[59]. ***, Cod de proiectare seismică P100, Partea I – P100 - 1/2006. Prevederi de
proiectare pentru clădiri, 2006.







