cupla cinematică reprezintă legătura
TRANSCRIPT
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 1/22
Cupla cinematic reprezint legtura, de orice fel, dintre dou elemente cinematice.
Conform definiiei, cuplele cinematice pot fi simple, dac într-un nod se întâlnesc numai dou elementecinematice (fig. 1.8.). În practic sunt cazuri când într-un nod se gsesc mai mult de dou elemente. Înaceast situaie cuplele sunt multiple.
Numrul cuplelor, dintr-un nod, se determin prin reducerea numrului de elemente cu o unitate.
În tehnic, exist o mare varietate de cuple cinematice care se pot clasifica dup anumite criterii,i anume:
a) dup numrul condiiilor de legtur introduse (al restriciilor) ± m;b) dup natura contactului;c) dup caracterul micrii relative dintre elemente;d) dup direcia micrilor;e) dup modul cum se realizeaz i menine contactul dintre elemente.Cel mai important criteriu de clasificare al cuplelor cinematice se refer la numrul m al
restriciilor.
Prin urmare, pentru determinarea clasei unei cuple cinematice, este necesar s se stabileascnumrul micrilor simple independente pe care le poate executa unul din elementele cuplei în micarealui relativ, care apoi se scade din 6.
În cele ce urmeaz se dau câteva exemple de cuple cinematice de diferite clase.
Cuple cinematice de clasa I , 1!m ; 5! L .
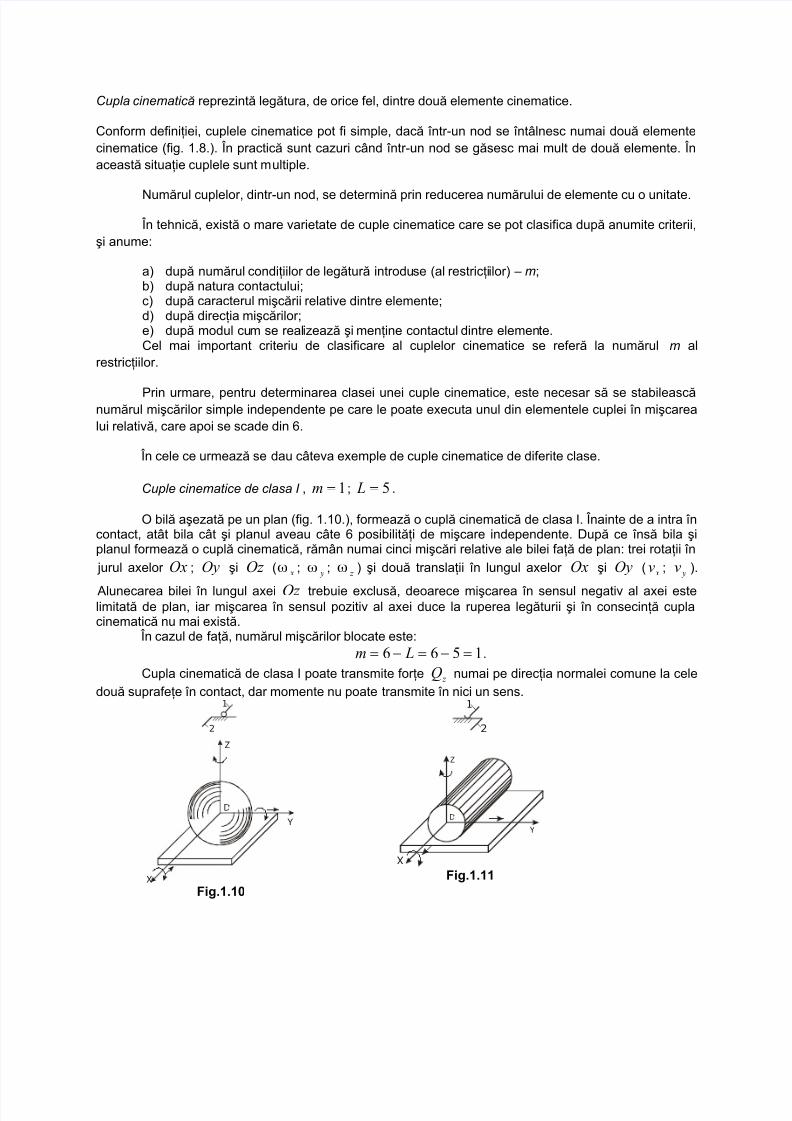
O bil aezat pe un plan (fig. 1.10.), formeaz o cupl cinematic de clasa I. Înainte de a intra încontact, atât bila cât i planul aveau câte 6 posibiliti de micare independente. Dup ce îns bila iplanul formeaz o cupl cinematic, rmân numai cinci micri relative ale bilei fa de plan: trei rotaii în
jurul axelor Ox ; Oy i Oz ( x[ ; y[ ; z[ ) i dou translaii în lungul axelor Ox i Oy ( xv ; yv ).
Alunecarea bilei în lungul axei Oz trebuie exclus, deoarece micarea în sensul negativ al axei estelimitat de plan, iar micarea în sensul pozitiv al axei duce la ruperea legturii i în consecin cuplacinematic nu mai exist.
În cazul de fa, numrul micrilor blocate este:1566 !!! Lm .
Cupla cinematic de clasa I poate transmite fore zQ numai pe direcia normalei comune la celedou suprafee în contact, dar momente nu poate transmite în nici un sens.
1
2
Y
X
Z
D
Fig.1.10
1
2
Y
X
Z
D
Fig.1.11
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 2/22
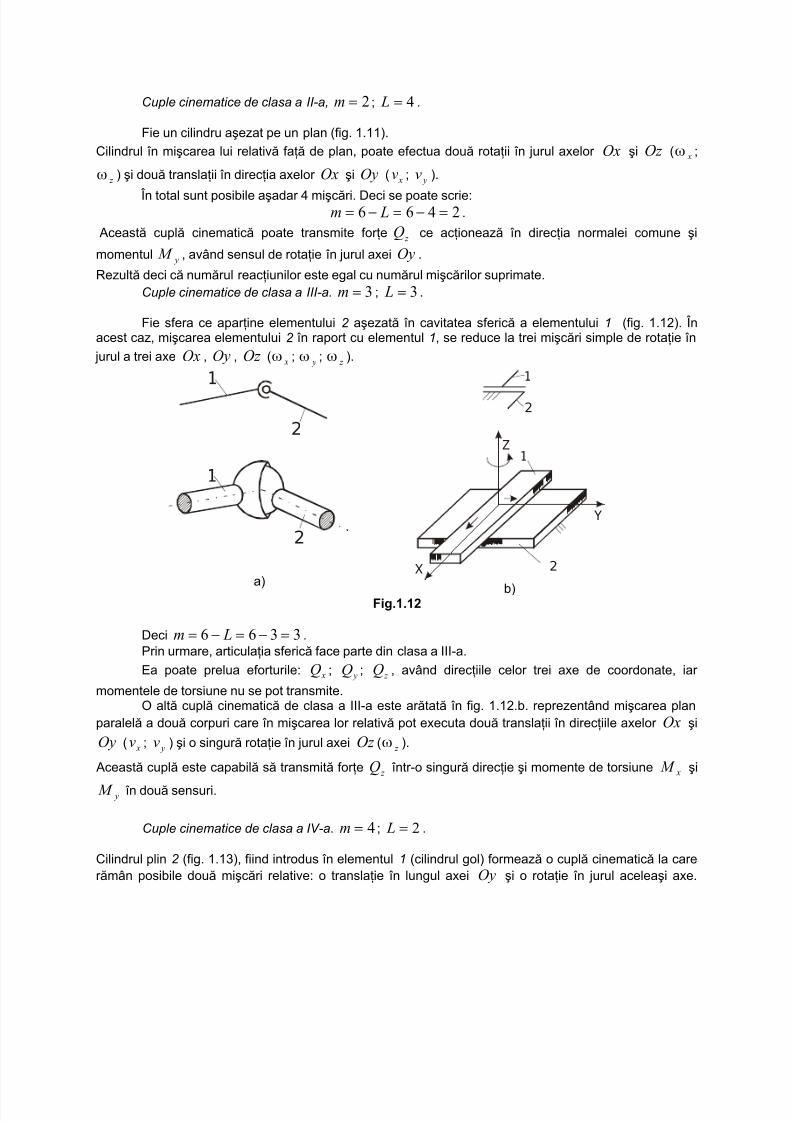
Cuple cinematice de clasa a II-a, 2!m ; 4! L .
Fie un cilindru aezat pe un plan (fig. 1.11).Cilindrul în micarea lui relativ fa de plan, poate efectua dou rotaii în jurul axelor Ox i Oz ( x[ ;
z[ ) i dou translaii în direcia axelor Ox i Oy ( xv ; yv ).
În total sunt posibile aadar 4 micri. Deci se poate scrie:2466 !!! Lm .
Aceast cupl cinematic poate transmite fore zQ ce acioneaz în direcia normalei comune i
momentul y M , având sensul de rotaie în jurul axei Oy .
Rezult deci c numrul reaciunilor este egal cu numrul micrilor suprimate.Cuple cinematice de clasa a III-a. 3!m ; 3! L .
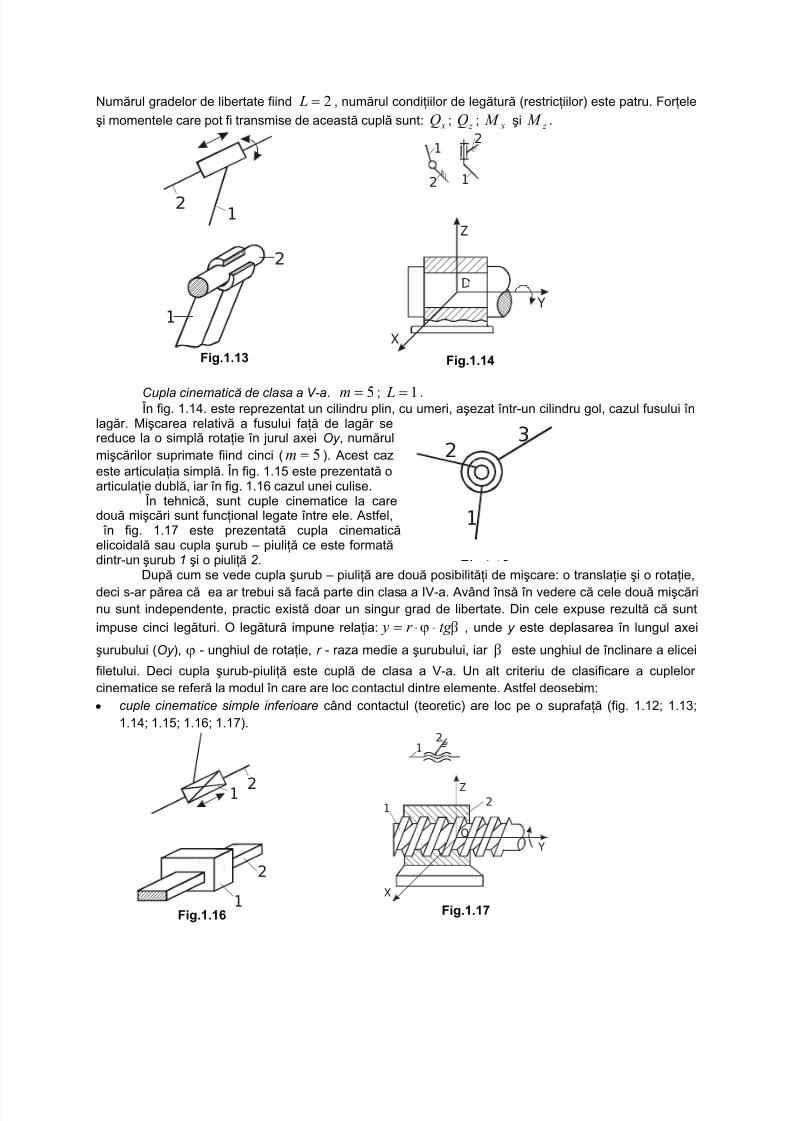
Fie sfera ce aparine elementului 2 aezat în cavitatea sferic a elementului 1 (fig. 1.12). Înacest caz, micarea elementului 2 în raport cu elementul 1, se reduce la trei micri simple de rotaie în
jurul a trei axe Ox , Oy , Oz ( x[ ; y[ ; z[ ).
2
1
2
1
a)
1
2
Y
X
Z
O
1
2
b)Fig.1.12
Deci 3366 !!! Lm .Prin urmare, articulaia sferic face parte din clasa a III-a.
Ea poate prelua eforturile: xQ ; yQ ; zQ , având direciile celor trei axe de coordonate, iar
momentele de torsiune nu se pot transmite.O alt cupl cinematic de clasa a III-a este artat în fig. 1.12.b. reprezentând micarea plan
paralel a dou corpuri care în micarea lor relativ pot executa dou translaii în direciile axelor Ox i
Oy ( xv ; yv ) i o singur rotaie în jurul axei Oz ( z[ ).
Aceast cupl este capabil s transmit fore zQ într-o singur direcie i momente de torsiune x M i
y M în dou sensuri.
Cuple cinematice de clasa a IV-a. 4!m ; 2! L .
Cilindrul plin 2 (fig. 1.13), fiind introdus în elementul 1 (cilindrul gol) formeaz o cupl cinematic la carermân posibile dou micri relative: o translaie în lungul axei Oy i o rotaie în jurul aceleai axe.
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 3/22
32
1
Numrul gradelor de libertate fiind 2! L , numrul condiiilor de legtur (restriciilor) este patru. Forele
i momentele care pot fi transmise de aceast cupl sunt: xQ ; zQ ; x M i z M .
21
2
1
Fig.1.13
1
2
Y
X
Z
D
2
1
Fig.1.14
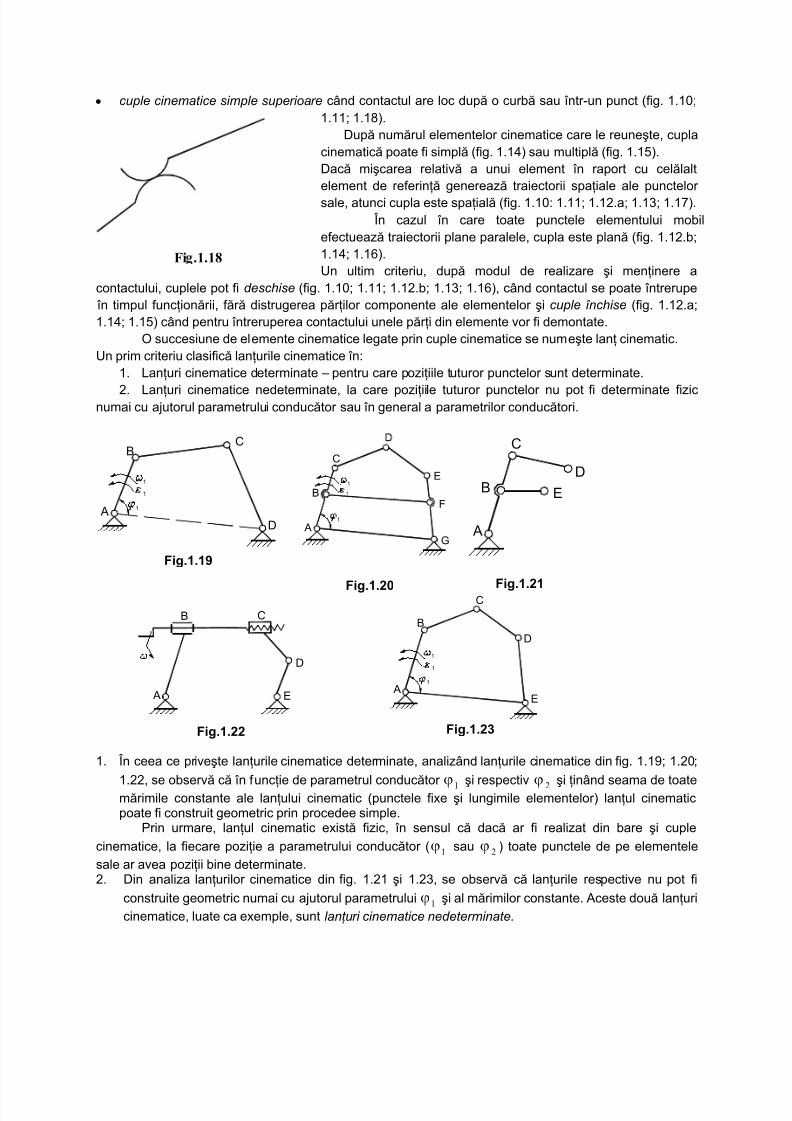
Cupla cinematic de clasa a V-a. 5!m ; 1! L . În fig. 1.14. este reprezentat un cilindru plin, cu umeri, aezat într-un cilindru gol, cazul fusului în
lagr. Micarea relativ a fusului fa de lagr sereduce la o simpl rotaie în jurul axei Oy , numrulmicrilor suprimate fiind cinci ( 5!m ). Acest cazeste articulaia simpl. În fig. 1.15 este prezentat oarticulaie dubl, iar în fig. 1.16 cazul unei culise.
În tehnic, sunt cuple cinematice la caredou micri sunt funcional legate între ele. Astfel,
în fig. 1.17 este prezentat cupla cinematicelicoidal sau cupla urub ± piuli ce este formatdintr-un urub 1 i o piuli 2 .
Dup cum se vede cupla urub ± piuli are dou posibiliti de micare: o translaie i o rotaie,
deci s-ar prea c ea ar trebui s fac parte din clasa a IV-a. Având îns în vedere c cele dou micrinu sunt independente, practic exist doar un singur grad de libertate. Din cele expuse rezult c suntimpuse cinci legturi. O legtur impune relaia: FN tg r y ! , unde y este deplasarea în lungul axei
urubului (Oy ), N - unghiul de rotaie, r - raza medie a urubului, iar F este unghiul de înclinare a elicei
filetului. Deci cupla urub-piuli este cupl de clasa a V-a. Un alt criteriu de clasificare a cuplelor cinematice se refer la modul în care are loc contactul dintre elemente. Astfel deosebim:y cuple cinematice simple infer ioar e când contactul (teoretic) are loc pe o suprafa (fig. 1.12; 1.13;
1.14; 1.15; 1.16; 1.17).
2
1
21
Fig.1.16
12
Y
X
Z
O
21
Fig.1.17
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 4/22
Fi .1.18
y cuple cinematice simple super ioar e când contactul are loc dup o curb sau într-un punct (fig. 1.10;1.11; 1.18).
Dup numrul elementelor cinematice care le reunete, cuplacinematic poate fi simpl (fig. 1.14) sau multipl (fig. 1.15).Dac micarea relativ a unui element în raport cu cellaltelement de referin genereaz traiectorii spaiale ale punctelor sale, atunci cupla este spaial (fig. 1.10: 1.11; 1.12.a; 1.13; 1.17).
În cazul în care toate punctele elementului mobilefectueaz traiectorii plane paralele, cupla este plan (fig. 1.12.b;1.14; 1.16).Un ultim criteriu, dup modul de realizare i meninere a
contactului, cuplele pot fi deschise (fig. 1.10; 1.11; 1.12.b; 1.13; 1.16), când contactul se poate întrerupe în timpul funcionrii, fr distrugerea prilor componente ale elementelor i cuple închise (fig. 1.12.a;1.14; 1.15) când pentru întreruperea contactului unele pri din elemente vor fi demontate.
O succesiune de elemente cinematice legate prin cuple cinematice se numete lan cinematic.Un prim criteriu clasific lanurile cinematice în:
1. Lanuri cinematice determinate ± pentru care poziiile tuturor punctelor sunt determinate.
2. Lanuri cinematice nedeterminate, la care poziiile tuturor punctelor nu pot fi determinate fizicnumai cu ajutorul parametrului conductor sau în general a parametrilor conductori.
A
BC
D
1
1
1
Fig.1.19
C
B
AG
F
E1
1
1
Fig.1.20
B
A
C
E
D
Fig.1.21
A
B
E
D
C
Fig.1.22
A
B
C
E
D1
1
1
Fig.1.23
1. În ceea ce privete lanurile cinematice determinate, analizând lanurile cinematice din fig. 1.19; 1.20;
1.22, se observ c în funcie de parametrul conductor 1N i respectiv 2N i inând seama de toatemrimile constante ale lanului cinematic (punctele fixe i lungimile elementelor) lanul cinematicpoate fi construit geometric prin procedee simple.
Prin urmare, lanul cinematic exist fizic, în sensul c dac ar fi realizat din bare i cuplecinematice, la fiecare poziie a parametrului conductor (
1N sau
2N ) toate punctele de pe elementele
sale ar avea poziii bine determinate.2. Din analiza lanurilor cinematice din fig. 1.21 i 1.23, se observ c lanurile respective nu pot fi
construite geometric numai cu ajutorul parametrului1
N i al mrimilor constante. Aceste dou lanuricinematice, luate ca exemple, sunt lanur i cinematice nedeter minate.
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 5/22
Se face precizarea c determinarea sau nedeterminarea unui lan cinematic poate fi observatprin posibilitatea de a construi lanul cinematic în funcie de parametrul (în general parametrii)conductor.
În tehnic, testarea determinrii se face mult mai uor i sigur prin introducerea noiunii de gradde mobilitate, aa cum se va vedea în paragraful urmtor (1.1.4).3. Un alt criteriu de clasificare împarte lanurile cinematice în:
a)Lanu
r i cinematice închise (fig. 1.19; 1.20; 1.22; 1.23)b) Lanur i cinematice deschise (fig. 1.21)
4. Alt criteriu clasific lanurile cinematice în:a) Lanur i cinematice simple, dac toate elementele lanului nu au decât cel mult dou cuple
cinematice (fig. 1.19; 1.22; 1.23)b) Lanur i cinematice complexe, în cazul în care unele elemente au mai mult de dou cuple
cinematice, de exemplu lanul cinematic din fig. 1.20.5. Un ultim criteriu, clasific lanurile cinematice în:
a) Lanur i cinematice plane (fig. 1.19; 1.20; 1.21; 1.23);b) Lanur i cinematice spaiale (fig. 1.22).
Un lan cinematic determinat i închis se numete mecanism.Pentru a se defini, gradul de mobilitate a unui mecanism se pleac de la noiunea de gradul de
libertate al lanului cinematic respectiv.Cel mai important criteriu de clasificare al mecanismelor, fiind un criteriu general, este clasificarea
în familii.Scopul clasificrii generale a mecanismelor în familii are la baz necesitatea determinrii
numrului condiiilor comune de legtur, adic a cifrei f . În acest mod va putea fi calculat gradul demobilitate al lanului cinematic (relaia 1.7) i deci poate fi cercetat condiia de determinare a lui (dedesmodromie). [25];[26];[34];[37];[42];[51];[65];[69].
Un alt scop const în stabilirea posibilitilor de decuplare a ecuaiilor necesare pentrudeterminarea configuraiei, a cinematicii i a cinetostaticii.
Familia se determin prin metoda tabelar aa cum s-a menionat.De exemplu, dac se vor analiza mecanismele din figurile: 1.27; 1.28; 1.29; 1.30; 1.31,
mecanismele se pot clasifica în: mecanisme de familia 0 ( 0! f ); mecanisme de familia 1 ( 1! f );
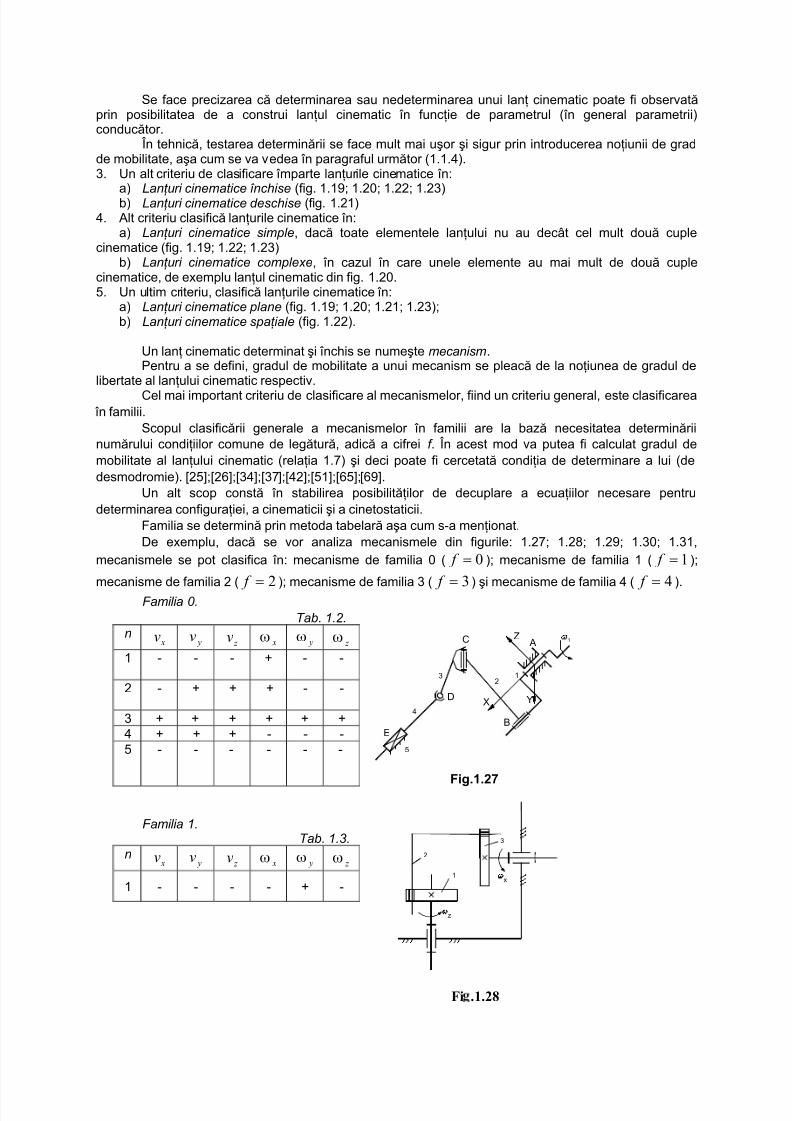
mecanisme de familia 2 ( 2! f ); mecanisme de familia 3 ( 3! f ) i mecanisme de familia 4 ( 4! f ).F amilia 0.
Tab. 1.2 .n
xv yv zv x[ y[
z[
5
E
C
4
3
D X
B
21
Z
Y
A 1
Fig.1.27
1 - - - + - -
2 - + + + - -
3 + + + + + +4 + + + - - -5 - - - - - -
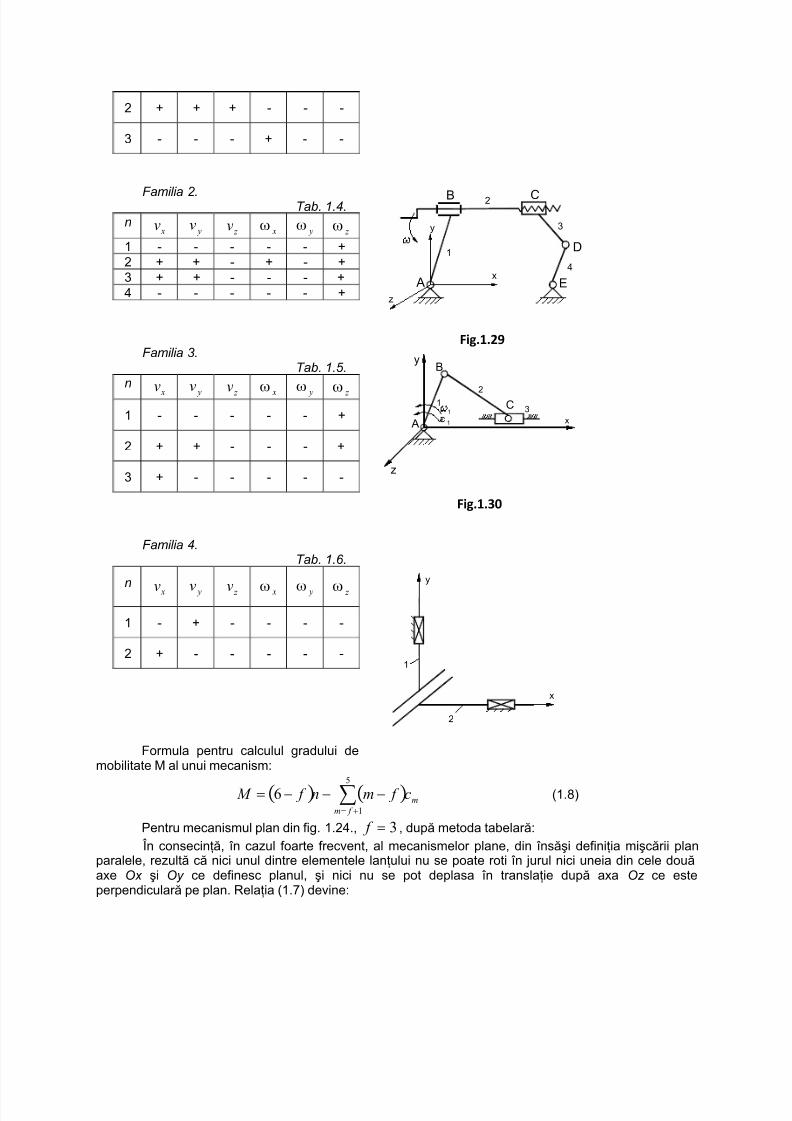
F amilia 1. Tab. 1.3.
n xv yv
zv x[ y[ z[
1 - - - - + -1
2
3
x
z
Fi .1.28
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 6/22
2 + + + - - -
3 - - - + - -
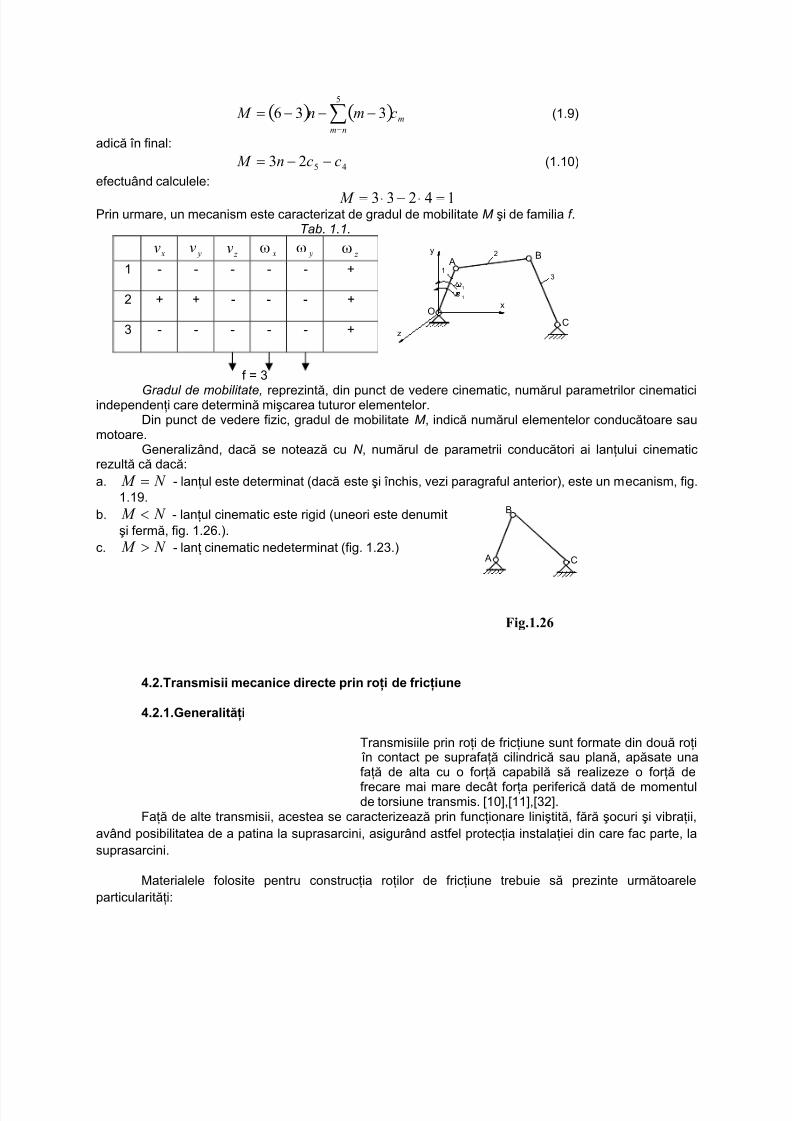
F amilia 2 . Tab. 1.4.n
xv yv
zv x[ y[
z[
1 - - - - - +2 + + - + - +3 + + - - - +4 - - - - - +
F amilia 3. Tab. 1.5.
n xv yv zv x[ y
[
z[ 1 - - - - - +
2 + + - - - +
3 + - - - - -
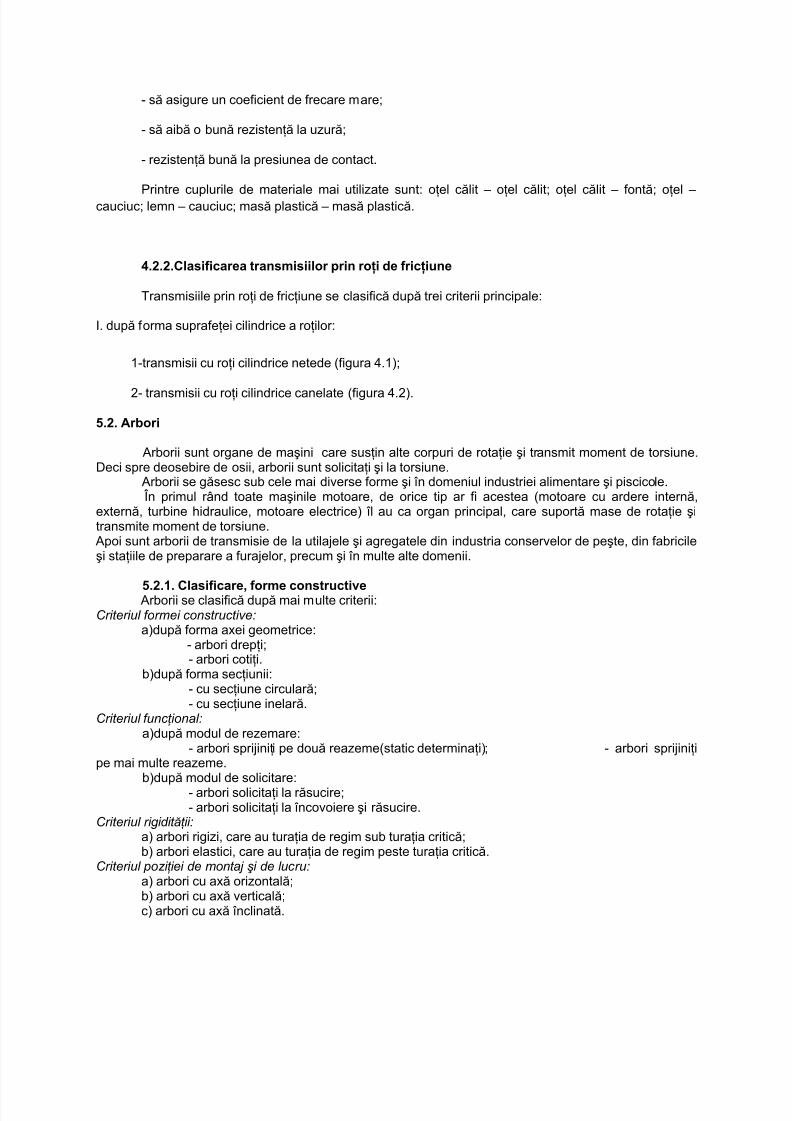
F amilia 4. Tab. 1.6.
n xv yv zv x[ y[ z[
1 - + - - - -
2 + - - - - -
Formula pentru calculul gradului demobilitate M al unui mecanism:
§!
!5
1
6 f m
mc f mn f M (1.8)
Pentru mecanismul plan din fig. 1.24., 3! f , dup metoda tabelar: În consecin, în cazul foarte frecvent, al mecanismelor plane, din însi definiia micrii plan
paralele, rezult c nici unul dintre elementele lanului nu se poate roti în jurul nici uneia din cele douaxe O x i Oy ce definesc planul, i nici nu se pot deplasa în translaie dup axa Oz ce esteperpendicular pe plan. Relaia (1.7) devine:
z
By
A
12
C 3x
1
1
Fig.1.30
1
2
y
x
A
B
E
D
C
1
2
3
4x
y
z
Fig.1.29
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 7/22
B
A C
Fig.1.26
§!
!5
336nm
mcmn M (1.9)
adic în final:
4523 ccn M ! (1.10)
efectuând calculele:
14233 !! M Prin urmare, un mecanism este caracterizat de gradul de mobilitate M i de familia f .
Tab. 1.1.
xv yv zv x[ y[
z[
O
AB
C
1
1
y
x
z
2
31
1 - - - - - +
2 + + - - - +
3 - - - - - +
f = 3
Gr adul de mobilitate, reprezint, din punct de vedere cinematic, numrul parametrilor cinematiciindependeni care determin micarea tuturor elementelor.Din punct de vedere fizic, gradul de mobilitate M , indic numrul elementelor conductoare sau
motoare.Generalizând, dac se noteaz cu N , numrul de parametrii conductori ai lanului cinematic
rezult c dac:a. N M ! - lanul este determinat (dac este i închis, vezi paragraful anterior), este un mecanism, fig.
1.19.b. N M - lanul cinematic este rigid (uneori este denumit
i ferm, fig. 1.26.).c. N M " - lan cinematic nedeterminat (fig. 1.23.)
4.2.Transmisii mecanice directe prin roi de friciune
4.2.1.Generaliti
Transmisiile prin roi de friciune sunt formate din dou roi în contact pe suprafa cilindric sau plan, apsate unafa de alta cu o for capabil s realizeze o for defrecare mai mare decât fora periferic dat de momentulde torsiune transmis. [10],[11],[32].
Fa de alte transmisii, acestea se caracterizeaz prin funcionare linitit, fr ocuri i vibraii,având posibilitatea de a patina la suprasarcini, asigurând astfel protecia instalaiei din care fac parte, lasuprasarcini.
Materialele folosite pentru construcia roilor de friciune trebuie s prezinte urmtoareleparticulariti:
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 8/22
- s asigure un coeficient de frecare mare;
- s aib o bun rezisten la uzur;
- rezisten bun la presiunea de contact.
Printre cuplurile de materiale mai utilizate sunt: oel clit ± oel clit; oel clit ± font; oel ±cauciuc; lemn ± cauciuc; mas plastic ± mas plastic.
4.2.2.Clasificarea transmisiilor prin roi de friciune
Transmisiile prin roi de friciune se clasific dup trei criterii principale:
I. dup forma suprafeei cilindrice a roilor:
1-transmisii cu roi cilindrice netede (figura 4.1);
2- transmisii cu roi cilindrice canelate (figura 4.2).
5.2. Arbori
Arborii sunt organe de maini care susin alte corpuri de rotaie i transmit moment de torsiune.Deci spre deosebire de osii, arborii sunt solicitai i la torsiune.
Arborii se gsesc sub cele mai diverse forme i în domeniul industriei alimentare i piscicole. În primul rând toate mainile motoare, de orice tip ar fi acestea (motoare cu ardere intern,
extern, turbine hidraulice, motoare electrice) îl au ca organ principal, care suport mase de rotaie itransmite moment de torsiune.
Apoi sunt arborii de transmisie de la utilajele i agregatele din industria conservelor de pete, din fabricilei staiile de preparare a furajelor, precum i în multe alte domenii.
5.2.1. Clasificare, forme constructive Arborii se clasific dup mai multe criterii:
C r iter iul for mei const r uctive:a)dup forma axei geometrice:
- arbori drepi;- arbori cotii.
b)dup forma seciunii:- cu seciune circular;- cu seciune inelar.
C r iter iul funcional:a)dup modul de rezemare:
- arbori sprijinii pe dou reazeme(static determinai); - arbori sprijiniipe mai multe reazeme.
b)dup modul de solicitare:- arbori solicitai la rsucire;- arbori solicitai la încovoiere i rsucire.
C r iter iul r igiditii:a) arbori rigizi, care au turaia de regim sub turaia critic;b) arbori elastici, care au turaia de regim peste turaia critic.
C r iter iul poz iiei de montaj i de luc r u:a) arbori cu ax orizontal;b) arbori cu ax vertical;c) arbori cu ax înclinat.
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 9/22
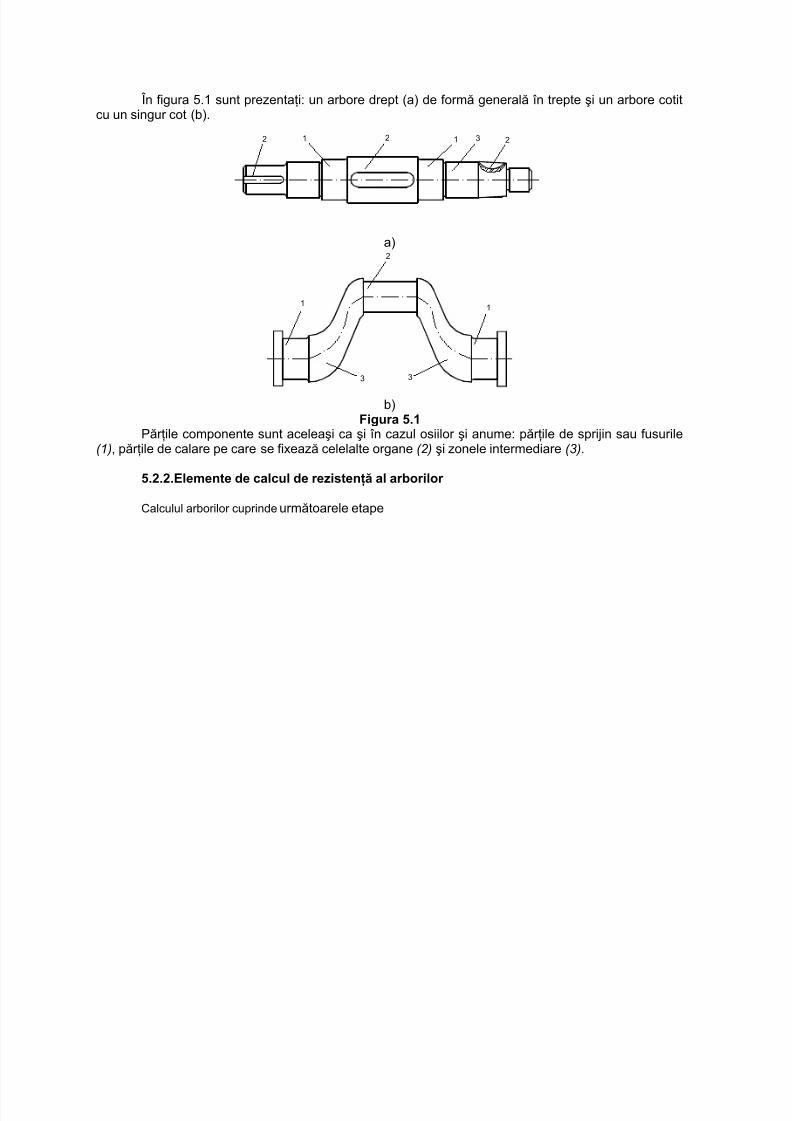
În figura 5.1 sunt prezentai: un arbore drept (a) de form general în trepte i un arbore cotitcu un singur cot (b).
21 12 23
a)
1
2
1
3 3
b)
Figura 5.1Prile componente sunt aceleai ca i în cazul osiilor i anume: prile de sprijin sau fusurile
( 1), prile de calare pe care se fixeaz celelalte organe ( 2 ) i zonele intermediare ( 3).
5.2.2.Elemente de calcul de rezisten al arborilor
Calculul arborilor cuprinde urmtoarele etape
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 10/22
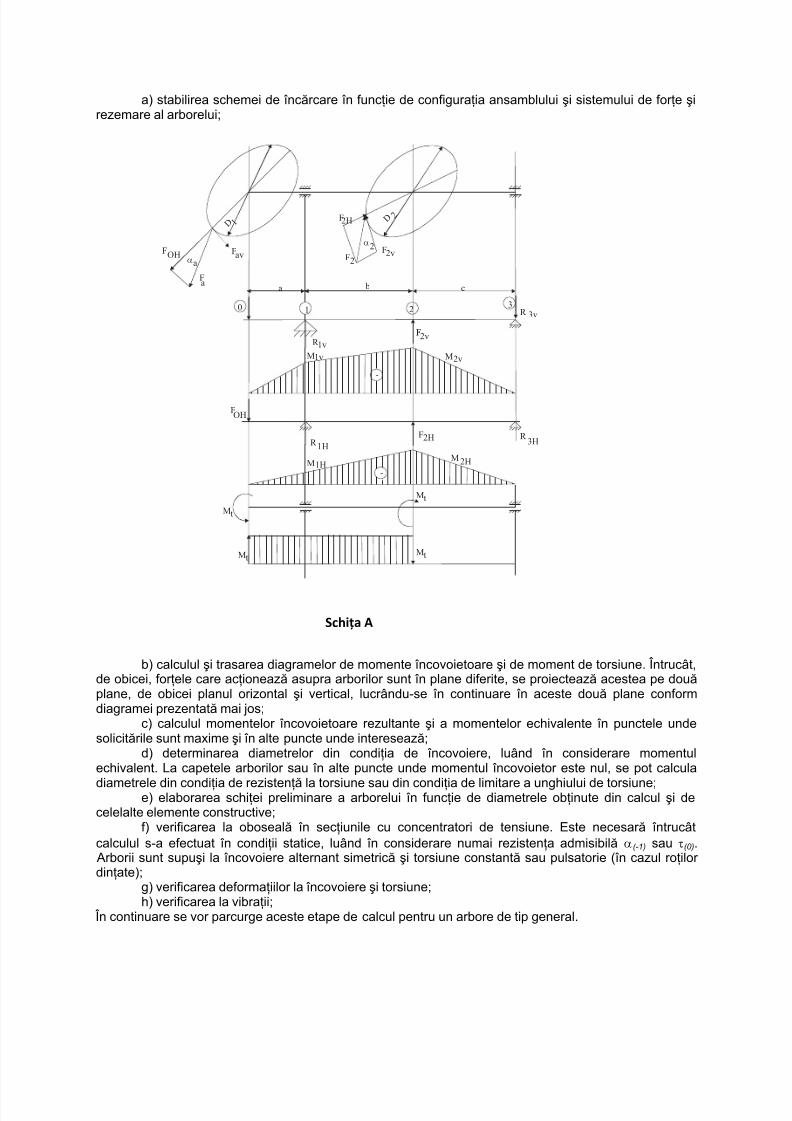
a) stabilirea schemei de încrcare în funcie de configuraia ansamblului i sistemului de fore irezemare al arborelui;
b) calculul i trasarea diagramelor de momente încovoietoare i de moment de torsiune. Întrucât,de obicei, forele care acioneaz asupra arborilor sunt în plane diferite, se proiecteaz acestea pe douplane, de obicei planul orizontal i vertical, lucrându-se în continuare în aceste dou plane conformdiagramei prezentat mai jos;
c) calculul momentelor încovoietoare rezultante i a momentelor echivalente în punctele undesolicitrile sunt maxime i în alte puncte unde intereseaz;
d) determinarea diametrelor din condiia de încovoiere, luând în considerare momentulechivalent. La capetele arborilor sau în alte puncte unde momentul încovoietor este nul, se pot calcula
diametrele din condiia de rezisten la torsiune sau din condiia de limitare a unghiului de torsiune;e) elaborarea schiei preliminare a arborelui în funcie de diametrele obinute din calcul i decelelalte elemente constructive;
f) verificarea la oboseal în seciunile cu concentratori de tensiune. Este necesar întrucâtcalculul s-a efectuat în condiii statice, luând în considerare numai rezistena admisibil E( -1) sau X( 0).
Arborii sunt supui la încovoiere alternant simetric i torsiune constant sau pulsatorie (în cazul roilor dinate);
g) verificarea deformaiilor la încovoiere i torsiune;h) verificarea la vibraii;
În continuare se vor parcurge aceste etape de calcul pentru un arbore de tip general.
F
OH
av
a
2H
2
2v
D
130
R
1v
3v
M
b c
t
1H3H
-
-
Mt
Mt
Mt
R
M1HM
2H
F
M M
R
R
F
1v2vF
FOH
F
F
a
1F
FF
2H
2v2
D 2
Ea
E2
Schia A

5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 11/22
cb
b F a F R
cb
C F l F R
vvv
vvv
!
!
203
201
(0-1) x F M v x
! 0
a F M a x
M x
v !!
!!
01
0
;
0;0
(1-2) a x R x F M vv x ! 10
b Ra F M ba x vv !! 102;
(2-3) ba x F a x R x F M vvv x ! 210
0; 3 !! M cba x
În mod analog se scriu ecuaiile i se traseaz diagramele în planul orizontal.Pentru diagrama de torsiune se calculeaz:
22
2
2
0
0
D
F
D
F M vvt !! Exist torsiune numai pe poriunea (0-2).Momentele rezultante sunt:
22
111 H vr iii M M M !
22
222 H vr iii M M M ! (5.1)
Momentul de încovoiere echivalent:
22
111t ii M M M
r ech! E
22
222t ii M M M
r ech! E (5.2)
unde E este un coeficient care ia în considerare modul diferit al variaiei tensiunilor produse de încovoierei respectiv torsiune. Valoarea sa este raportul între tensiunea Wai ( -1) corespunztoare încovoierii alternantsimetrice i Wai (r ) corespunztoare tipului de solicitare la torsiune:
)(
)1(
r ai
ai
W
WE
! (5.3)
Diametrele, în punctele de moment echivalent maxim sau unde intereseaz, sunt:
3
)1(
11
32
u
ai
iech M
d WT
3
)1(
22
32
u
ai
iech M
d WT
(5.4)
În punctele unde momentul încovoietor lipsete, se dimensioneaz din condiia de tensiune sauconstructiv, funcie de alte dimensiuni:
30
16
at
t M d
XT
u (5.5)
sau 30
32
a
t
G
l M d
UT
u (5.6)
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 12/22
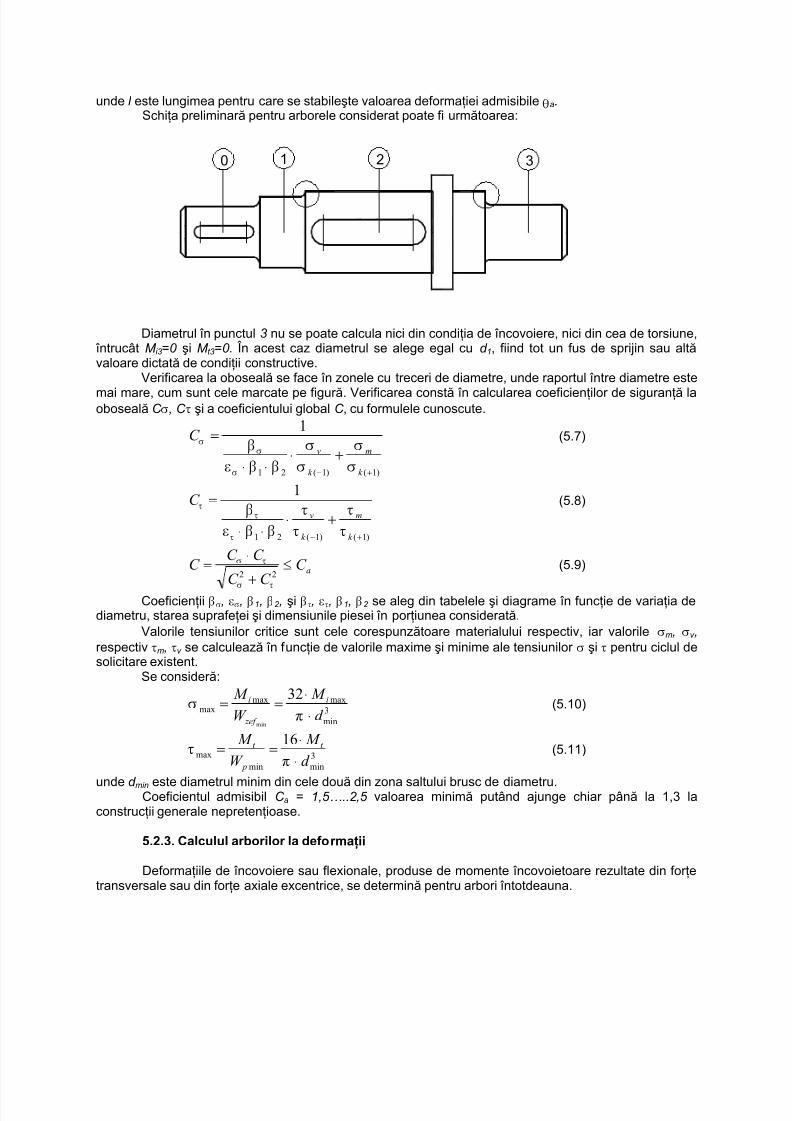
unde l este lungimea pentru care se stabilete valoarea deformaiei admisibile Ua.Schia preliminar pentru arborele considerat poate fi urmtoarea:
Diametrul în punctul 3 nu se poate calcula nici din condiia de încovoiere, nici din cea de torsiune, întrucât M i3=0 i M t3=0 . În acest caz diametrul se alege egal cu d 1, fiind tot un fus de sprijin sau altvaloare dictat de condiii constructive.
Verificarea la oboseal se face în zonele cu treceri de diametre, unde raportul între diametre este
mai mare, cum sunt cele marcate pe figur. Verificarea const în calcularea coeficienilor de siguran laoboseal C W, C X i a coeficientului global C , cu formulele cunoscute.
)1()1(21
1
!
k
m
k
v
C
W
W
W
W
F FI
F
W
WW (5.7)
)1()1(21
1
!
k
m
k
v
C
X
X
X
X
F FI
F
X
XX (5.8)
aC C C
C C C e
!
22
XW
XW (5.9)
Coeficienii FW, IW, F1, F2 , i FX, IX, F1, F2 se aleg din tabelele i diagrame în funcie de variaia dediametru, starea suprafeei i dimensiunile piesei în poriunea considerat.
Valorile tensiunilor critice sunt cele corespunztoare materialului respectiv, iar valorile Wm, Wv ,respectiv Xm, Xv se calculeaz în funcie de valorile maxime i minime ale tensiunilor W i X pentru ciclul desolicitare existent.
Se consider:
3
min
maxmaxmax
32
mind
M
W
M i
ze f
i
!!
TW (5.10)
3
minmin
max
16
d
M
W
M t
p
t
!!T
X (5.11)
unde d min este diametrul minim din cele dou din zona saltului brusc de diametru.Coeficientul admisibil C a = 1,5«..2 ,5 valoarea minim putând ajunge chiar pân la 1,3 laconstrucii generale nepretenioase.
5.2.3. Calculul arborilor la deformaii
Deformaiile de încovoiere sau flexionale, produse de momente încovoietoare rezultate din foretransversale sau din fore axiale excentrice, se determin pentru arbori întotdeauna.
20 1 3
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 13/22
Deformaiile de rsucire sau torsionale, ca efect al momentelor de rsucire, sunt luate înconsiderare numai la arbori i se verific atunci când buna funcionare a agregatului fixeaz limite înacest sens.
5.2.3.1. Calculul deformaiilor la încovoiere
În calculul acestor deformaii, în general, pentru simplificare, forele active i rezemrile(fore) înlagre sunt considerate ca fore concentrate.Deformaiile datorit încovoierii, în unele cazuri, are o influen negativ asupra calitii
construciei i a bunei funcionri.De exemplu, deformaia accentuat a arborilor face s apar frecri suplimentare în reazeme. Ca
urmare, repartiia sarcinii pe lungimea lagrului este uniform. Ca efect, în cazul lagrului de alunecare,aceasta produce la ridicarea temperaturii i la o uzur mai rapid, iar în cazul rulmenilor, la înepenireacorpurilor de rulare i în consecin la micorarea duratei de funcionare.
În cazul angrenajelor, o deformaie pronunat a arborelui face ca repartiia sarcinii pe lungimeadintelui s fie neuniform i prin urmare funcionarea acestora s fie incorect.
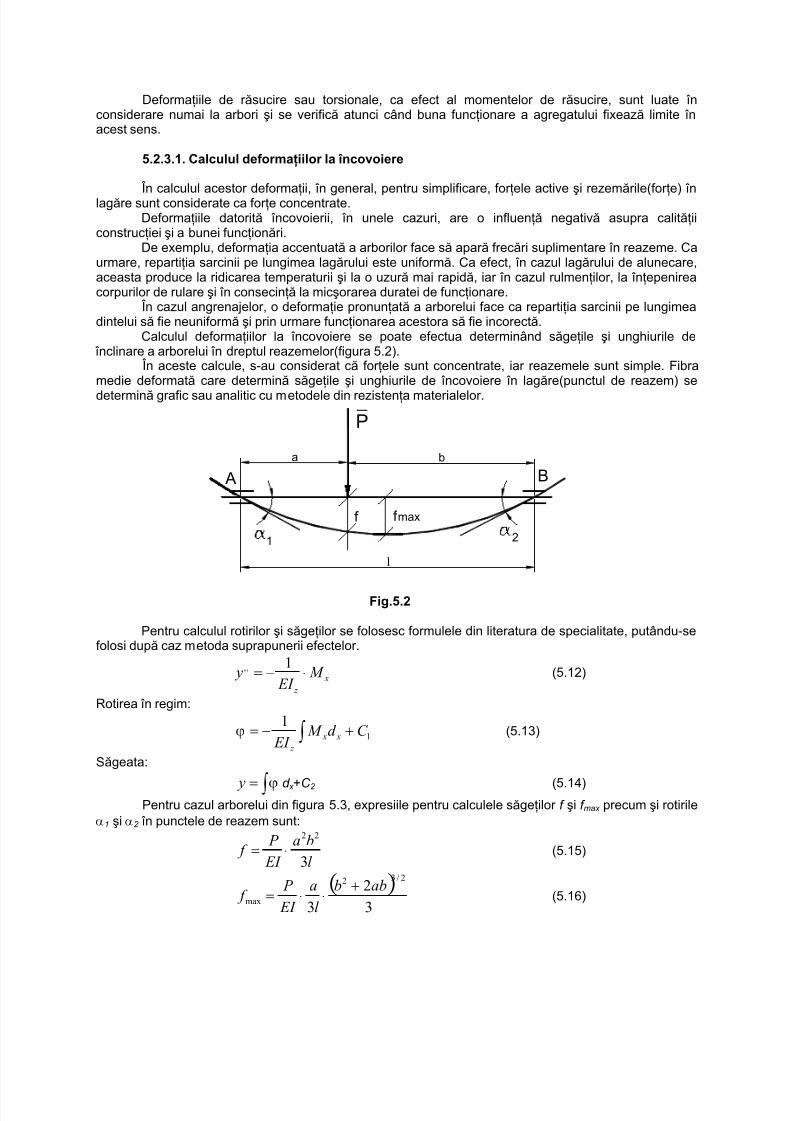
Calculul deformaiilor la încovoiere se poate efectua determinând sgeile i unghiurile de înclinare a arborelui în dreptul reazemelor(figura 5.2).
În aceste calcule, s-au considerat c forele sunt concentrate, iar reazemele sunt simple. Fibramedie deformat care determin sgeile i unghiurile de încovoiere în lagre(punctul de reazem) sedetermin grafic sau analitic cu metodele din rezistena materialelor.
l
ba
A
P
f f max
B
1 2
Fig.5.2
Pentru calculul rotirilor i sgeilor se folosesc formulele din literatura de specialitate, putându-sefolosi dup caz metoda suprapunerii efectelor.
x
z
M EI
y !1,, (5.12)
Rotirea în regim:
1
1C d M
EI x x
z
! ´N (5.13)
Sgeata:
´! N y d x +C 2 (5.14)Pentru cazul arborelui din figura 5.3, expresiile pentru calculele sgeilor f i f max precum i rotirile
E1 i E2 în punctele de reazem sunt:
l
ba
EI
P f
3
22
! (5.15)
3
2
3
2/32
max
abb
l
a
EI
P f
! (5.16)
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 14/22
l
abab
EI
P
l
baab
EI
P
6
2
6
2
2
1
!
!
E
E
Pentru cazul când asupra arborelui acioneaz dou sau mai multe fore concentrate, sgeile din
dreptul fiecreia se pot calcula prin însumarea sgeii date de fora din punctul considerat cu sgeile dinacelai punct date de celelalte fore, în ipoteza c acestea acioneaz separat, folosindu-se prin urmaremetoda suprapunerii efectelor.
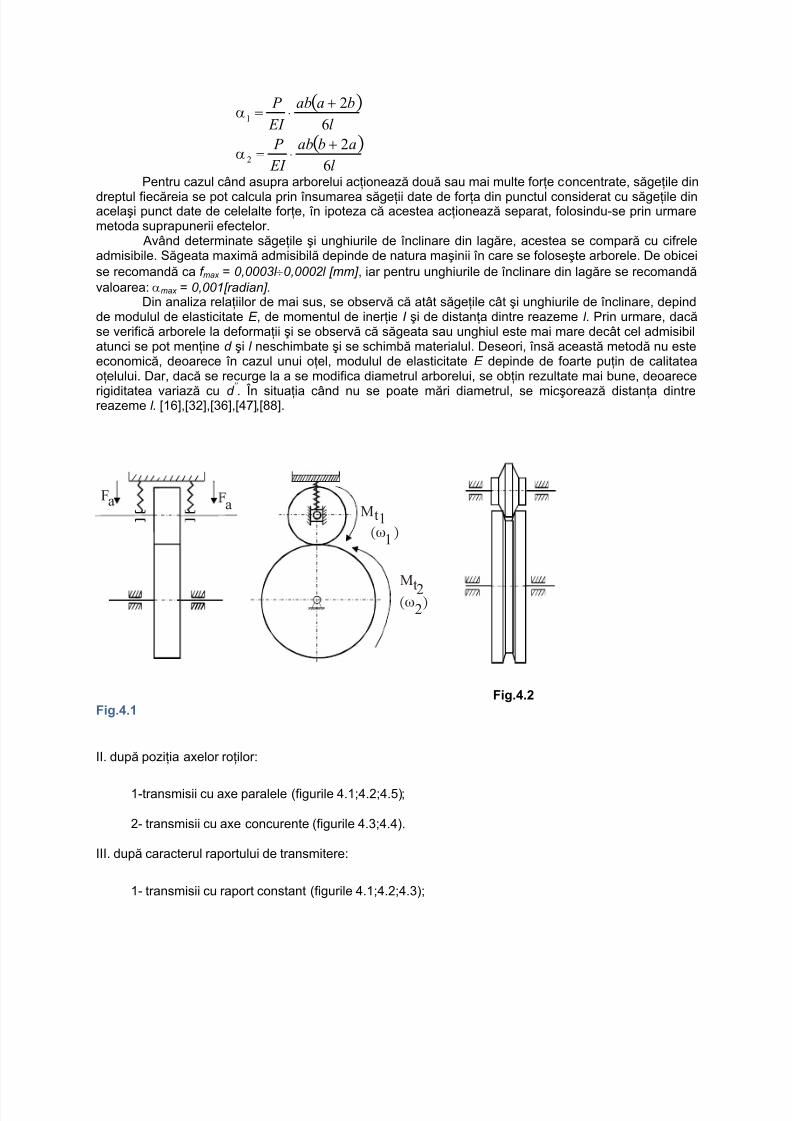
Având determinate sgeile i unghiurile de înclinare din lagre, acestea se compar cu cifreleadmisibile. Sgeata maxim admisibil depinde de natura mainii în care se folosete arborele. De obiceise recomand ca f max = 0,0003l z0,000 2 l [mm] , iar pentru unghiurile de înclinare din lagre se recomandvaloarea: Emax = 0,001[ r adian].
Din analiza relaiilor de mai sus, se observ c atât sgeile cât i unghiurile de înclinare, depindde modulul de elasticitate E , de momentul de inerie I i de distana dintre reazeme l . Prin urmare, dacse verific arborele la deformaii i se observ c sgeata sau unghiul este mai mare decât cel admisibilatunci se pot menine d i l neschimbate i se schimb materialul. Deseori, îns aceast metod nu esteeconomic, deoarece în cazul unui oel, modulul de elasticitate E depinde de foarte puin de calitateaoelului. Dar, dac se recurge la a se modifica diametrul arborelui, se obin rezultate mai bune, deoarece
rigiditatea variaz cu d ¶¶
. În situaia când nu se poate mri diametrul, se micoreaz distana dintrereazeme l . [16],[32],[36],[47],[88].
Fa a
Mt
1
2
Mt
[1
[2
Fig.4.1Fig.4.2
II. dup poziia axelor roilor:
1-transmisii cu axe paralele (figurile 4.1;4.2;4.5);
2- transmisii cu axe concurente (figurile 4.3;4.4).
III. dup caracterul raportului de transmitere:
1- transmisii cu raport constant (figurile 4.1;4.2;4.3);
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 15/22
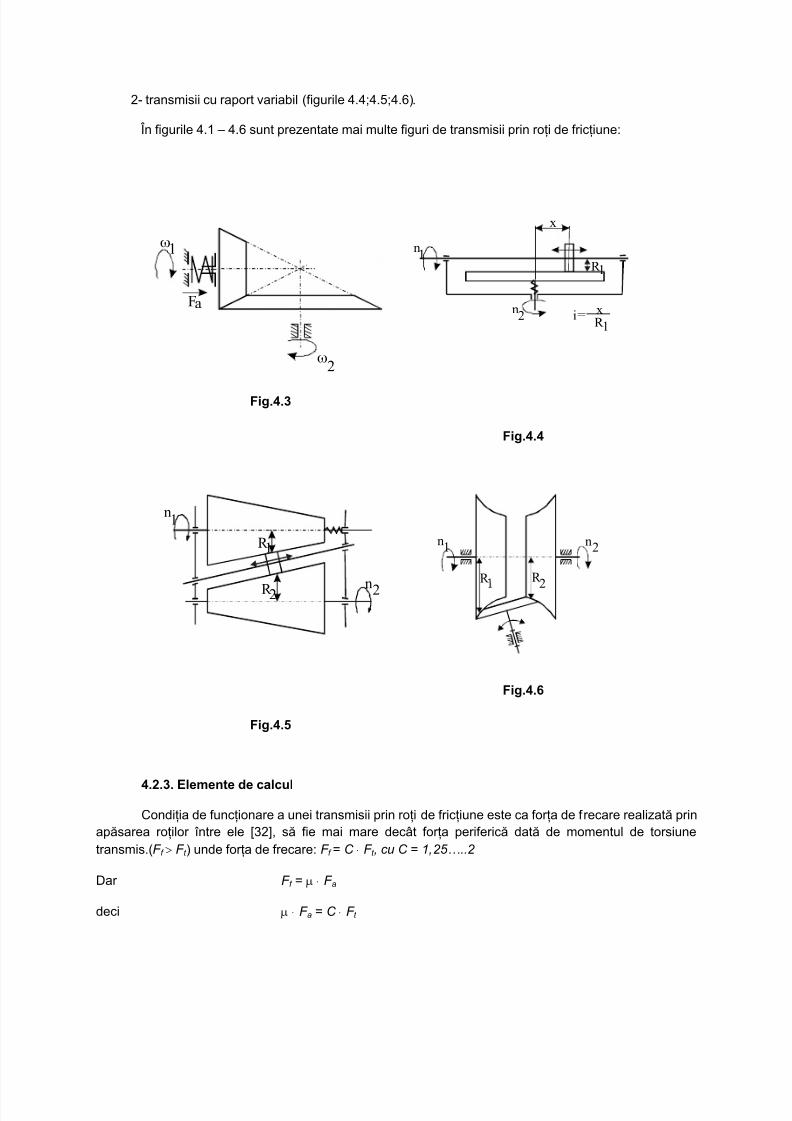
2- transmisii cu raport variabil (figurile 4.4;4.5;4.6).
În figurile 4.1 ± 4.6 sunt prezentate mai multe figuri de transmisii prin roi de friciune:
Fa
[2
[1
Fig.4.3
x
n 2
n
R
1
1
=x
i R 1
Fig.4.4
R 1
n2R 2
n1
Fig.4.5
n1
R
n2
R
2
Fig.4.6
4.2.3. Elemente de calcul
Condiia de funcionare a unei transmisii prin roi de friciune este ca fora de frecare realizat prinapsarea roilor între ele [32], s fie mai mare decât fora periferic dat de momentul de torsiunetransmis.(F f " F t ) unde fora de frecare: F f = C F t , cu C = 1,2 5«..2
Dar F f = Q F a
deci Q F a = C F t

5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 16/22
prin urmare:Q
t a
F C F
! (4.1) iar,
21
21
R
M
R
M F
t t
t !!
in final,1
1
R
M C F
t
a
!
Q(4.2)
tiind c:11 1
[!t
M P - unde P 1 este puterea ce trebuie transmis, rezult:
11
1
R
P C F a
!
[Q(4.3)
Dintr-un calcul estimativ, folosind valori medii, rezult o for de apsare de 8 pân la 12 ori maimare decât F 1. Aceasta duce la limitarea posibilitilor de transmitere a puterilor pân la 20-25 kw.
Pentru mrirea acestei limite se folosesc roile canelate, la care frecrile sunt mai mari pentruaceeai for de apsare:
F a = 2 F N sinE
QQt f
N
F C F F
!!
deci: EQ
sin2 t a F C F ! (4.4)
Se observ în acest caz c dac sinE ½ E 30 0 , rezult o for de apsare mai mic decât
la roile cilindrice netede.
Dezavantajul care apare în acest caz const în existena unor frecri mai mari pe pereii laterali icaneluri, datorit diferenelor de viteze de alunecare ale celor dou roi, pe zonele diferite de diametrulmediu. Aceste frecri duc desigur la uzur mai accentuat i durabilitate mai mic a transmisiei.
În cazul roilor conice, fora de apsare F a se descompune într-o component normal la linia decontact i o component pe direcia acestei linii.
1
2
2
1
R
Ri !!
[[
22
11
sin
sin
E
E
!
!
OA R
OA R

5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 17/22
Deci:2
1
sin
sin
E
E!i
1sinE
N a
F F !
QQt f
N
F C F F
!!
Deci:1
sinEQ
! t
a
F C F (4.5)
Dimensionarea roilor de friciune se face pe baza rezistenei de contact.
Se pornete de la formula lui Herz, din care în final se ajunge la valoarea distanei dintre axe:
a H N
H b
E F W
VW e
! 418,0 (4.6)
E este modulul de elasticitate echivalent:
21
212
E E
E E E
!
V este raza de curbur echivalent:
21
111
R R !! V
se vor exprima V i b în funcie de a i i:
a = R 1 s R 2 = R 1 ( i s 1) la roile cilindrice:
ab
a
i M C F
iia
R R R R M C F C F
i
ia R
i
a R
a
t
n
t t N
!
s!
s!
s!!!
s
!
s!
]
Q
1
1
1
1
1
1
2
21
21
2
1
unde ]a = 0,2 «..0,4, este coeficient de lime în funcie de distana între axe a
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 18/22
O
R
y = n
V
iX
Q
i
Q
xx
N
C o n
c o n
d u c ã t o r
H
x H
min
max
M
minx
h
XR
i
(y = n = const.)
(y = n )
y= n=const.
e x
e x
xmax
i x
Fig.4.7
Înlocuind în formula (4.6) se obine:
a H
a
t
H ia
i M C W
]QW e
s!
3
31
418,0 1 (4.7)
La limit:
32
11747,0
i
E M C iia
aa H
t
s!
]WQ(4.8)
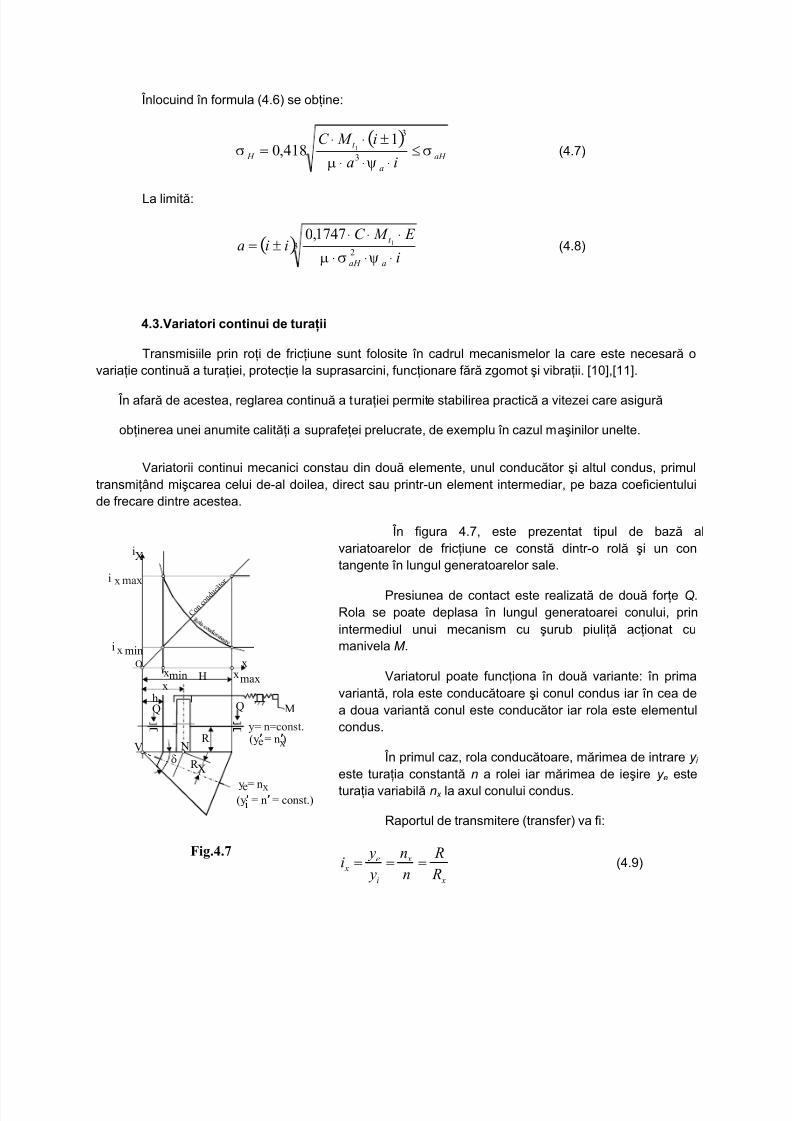
4.3.Variatori continui de turaii
Transmisiile prin roi de friciune sunt folosite în cadrul mecanismelor la care este necesar ovariaie continu a turaiei, protecie la suprasarcini, funcionare fr zgomot i vibraii. [10],[11].
În afar de acestea, reglarea continu a turaiei permite stabilirea practic a vitezei care asigur
obinerea unei anumite caliti a suprafeei prelucrate, de exemplu în cazul mainilor unelte.
Variatorii continui mecanici constau din dou elemente, unul conductor i altul condus, primultransmiând micarea celui de-al doilea, direct sau printr-un element intermediar, pe baza coeficientuluide frecare dintre acestea.
În figura 4.7, este prezentat tipul de baz alvariatoarelor de friciune ce const dintr-o rol i un contangente în lungul generatoarelor sale.
Presiunea de contact este realizat de dou fore Q.Rola se poate deplasa în lungul generatoarei conului, prinintermediul unui mecanism cu urub piuli acionat cumanivela M .
Variatorul poate funciona în dou variante: în primavariant, rola este conductoare i conul condus iar în cea dea doua variant conul este conductor iar rola este elementulcondus.
În primul caz, rola conductoare, mrimea de intrare y i este turaia constant n a rolei iar mrimea de ieire y e esteturaia variabil n x la axul conului condus.
Raportul de transmitere (transfer) va fi:
x
x
i
e x
R
R
n
n
y
yi !!! (4.9)

5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 19/22
în care: R ± este raza rolei, iar R x = x sinH -este raza cercului în seciune N a conului, la distana x de lavârful V al acestuia (figura 4.7), rezult c:
x
C
x
Ri x !!
Hsin(4.10)
undeHsin
RC ! cuprinde constante constructive.
Raportul de transmitere fiind variabil dup o lege hiperbolic (curba 1), rezult c i turaiaconului va fi variabil dup aceeai lege, deoarece:
nin x x ! (4.11)
Domeniul de reglare a raportului de transmitere este limitat de mrimile externe x min=h i x max =H ,determinate din cauze funcionale pentru x min i dimensional ± constructive pentru x max .
În cazul variantei în care conul este conductor având turaia nd = constant = y d, iar, rolacondus are turaia variabil nd x = y de raportul de transmitere (transfer) va fi:
R
R
n
n
y
yi x x
i
e x !!!
,
,
,
,
(4.12)
Deci:
,
sin
C
x
R
xi x !!
H(4.13)
unde: R
C Hsin, ! - constante.
Variaia raportului de transmitere este, liniar în acest caz i în acelai mod variaz i turaia de
transfer (transmitere) pentru variatorul cu con i rol, reprezentând o caracteristic a acestuia, a crui
expresie este:
G
H
i
iC i x !!
min
max (4.14)
pentru ambele cazuri de funcionare. Aceast expresie se deduce inând seama de faptul c: x max = H
iar x min= h.
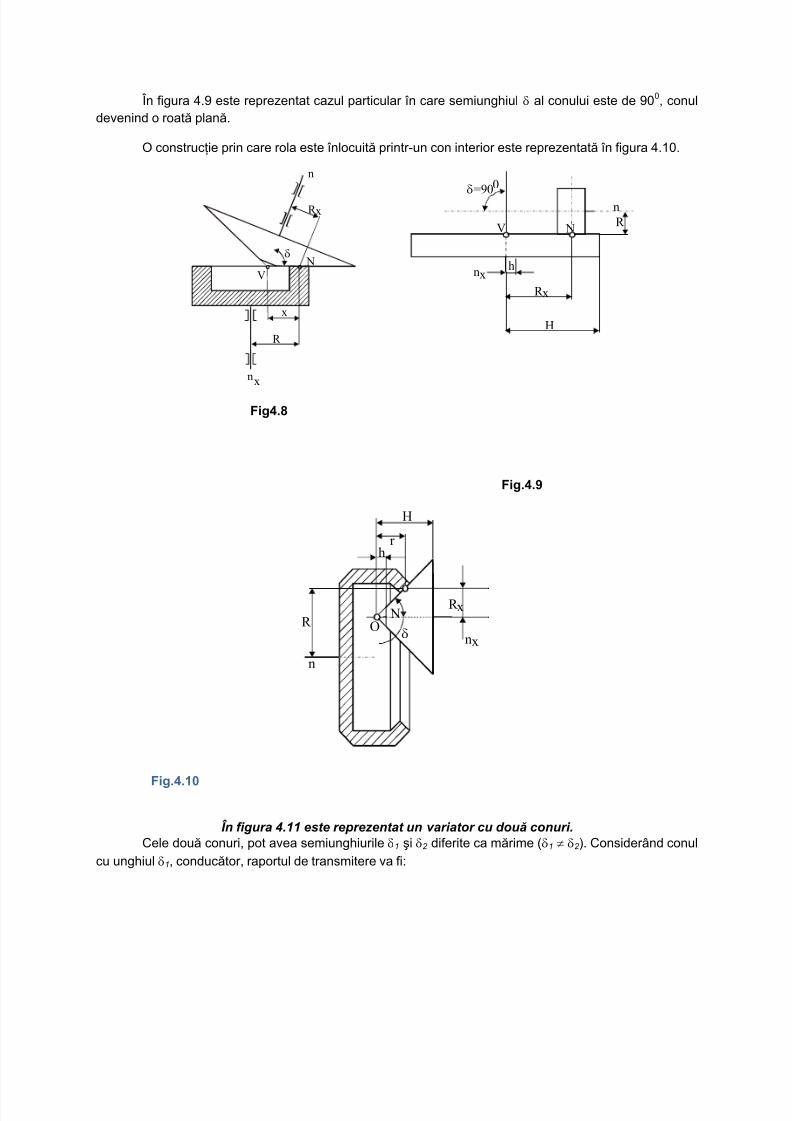
În figura 4.8 este reprezentat o variant constructiv a variatorului cu un con în care rola este
înlocuit prin coroana unei roi plane.
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 20/22
În figura 4.9 este reprezentat cazul particular în care semiunghiul H al conului este de 900, conuldevenind o roat plan.
O construcie prin care rola este înlocuit printr-un con interior este reprezentat în figura 4.10.
R
R x
nx
V
n
N
x
H
Fig4.8
n
nx
R x
h
H
R V N
H=900
Fig.4.9
O
H
R N
H
h
n
r
R x
nx
Fig.4.10
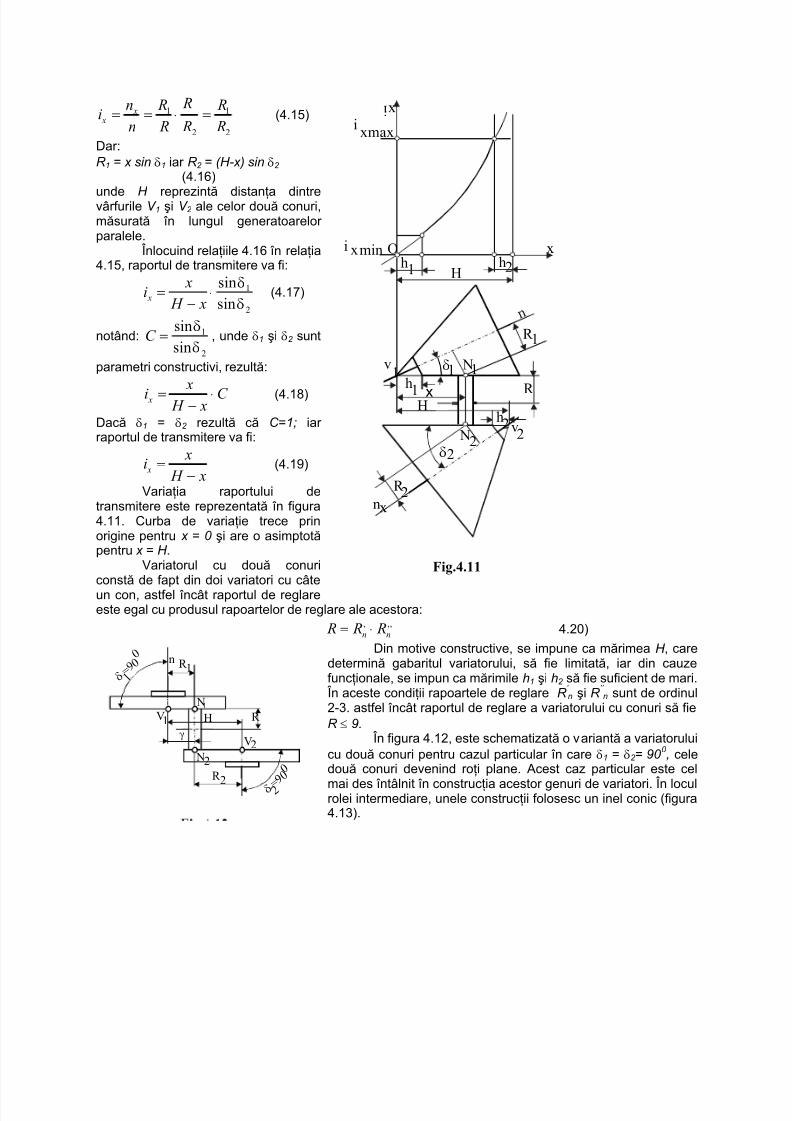
În figura 4.11 este reprezentat un variator cu dou conuri.Cele dou conuri, pot avea semiunghiurile H1 i H2 diferite ca mrime (H1 { H2 ). Considerând conul
cu unghiul H1, conductor, raportul de transmitere va fi:
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 21/22
h 2
H 2
h
v2
i
1H
R
x
2
1
R
x
v
n x
x
1H
N2
1 N
H
1
h 1
R
h 2
O
i
x min
i xmax
n
Fig.4.11
H
R
1 N
1
R
V2
2
V
2
N
n
K
1R
=
9
0
0
H 2
=
9 0
H
0
1
2
1
2
1
R
R
R
R
R
R
n
ni x x !!! (4.15)
Dar:R 1 = x sin H1 iar R 2 = ( H-x) sin H2
(4.16)
unde H reprezint distana dintrevârfurile V 1 i V 2 ale celor dou conuri,msurat în lungul generatoarelor paralele.
Înlocuind relaiile 4.16 în relaia4.15, raportul de transmitere va fi:
2
1
sin
sin
H
H
!
x H
xi x (4.17)
notând:2
1
sin
sin
H
H!C , unde H1 i H2 sunt
parametri constructivi, rezult:
C x H
xi x ! (4.18)
Dac H1 = H2 rezult c C=1; iar raportul de transmitere va fi:
x H
xi x ! (4.19)
Variaia raportului detransmitere este reprezentat în figura4.11. Curba de variaie trece prinorigine pentru x = 0 i are o asimptotpentru x = H .
Variatorul cu dou conuri
const de fapt din doi variatori cu câteun con, astfel încât raportul de reglareeste egal cu produsul rapoartelor de reglare ale acestora:
,,,
nn R R R ! 4.20)
Din motive constructive, se impune ca mrimea H , caredetermin gabaritul variatorului, s fie limitat, iar din cauzefuncionale, se impun ca mrimile h1 i h2 s fie suficient de mari.
În aceste condiii rapoartele de reglare R ¶ n i R
¶¶ n sunt de ordinul
2-3. astfel încât raportul de reglare a variatorului cu conuri s fieR e 9.
În figura 4.12, este schematizat o variant a variatoruluicu dou conuri pentru cazul particular în care H1 = H2 = 90 0 , celedou conuri devenind roi plane. Acest caz particular este cel
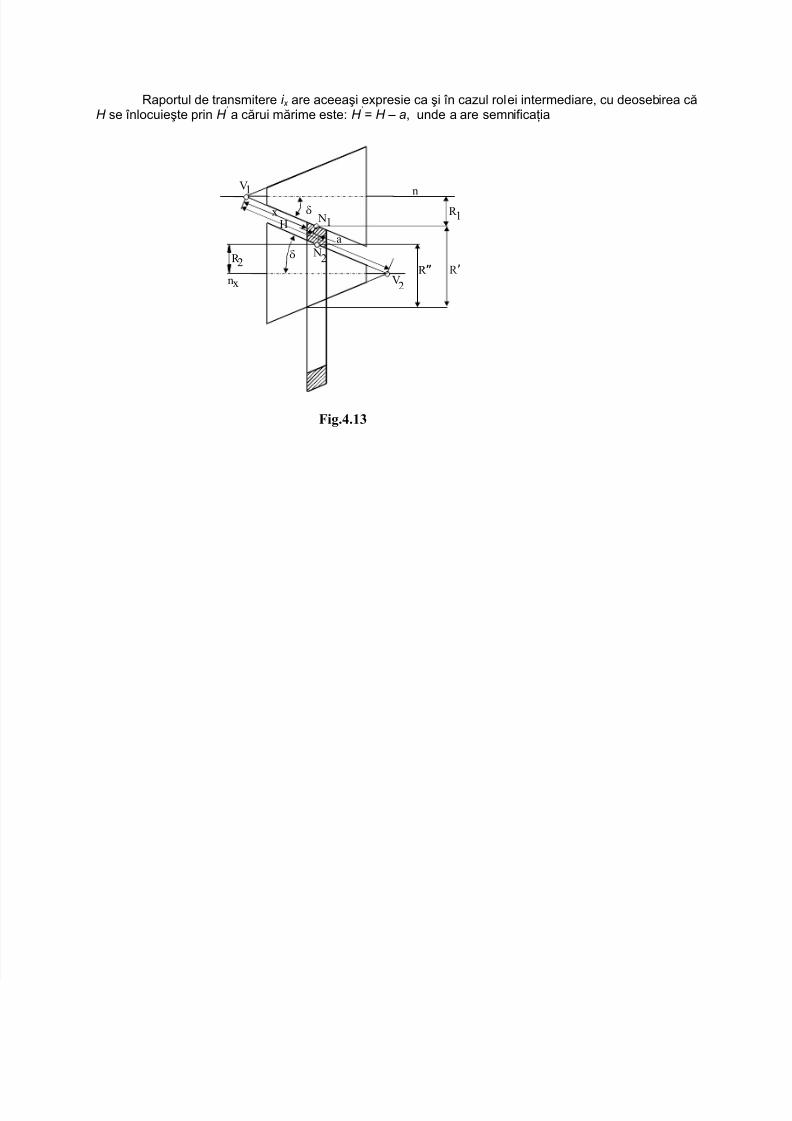
mai des întâlnit în construcia acestor genuri de variatori. În loculrolei intermediare, unele construcii folosesc un inel conic (figura4.13).
5/12/2018 Cupla cinematică reprezintă legătura - slidepdf.com
http://slidepdf.com/reader/full/cupla-cinematica-reprezinta-legatura 22/22
Raportul de transmitere i x are aceeai expresie ca i în cazul rolei intermediare, cu deosebirea cH se înlocuiete prin H
¶ a crui mrime este: H ¶ = H ± a, unde a are semnificaia
x
2
R 2
1
V
1 R
n
1
a
2 H
H N
R µ
n
H
N
V x
R
Fig.4.13