- analiza cinematic 1 2 echipamente / instrumente ... · fig. 1 4.1.2 analiza cinematică a...
TRANSCRIPT
UNIVERSITATEA DIN CRAIOVA FACULTATEA DE MECANICĂ Laboratorul de Mecanisme Student: ... Anul/Grupa/Secţia: ... Data: ... Lucrarea: ŞEPINGUL - ANALIZA CINEMATICĂ 1 Obiectivele lucrării:
Calculul cinematic (poziţii, viteze) al elementului condus din mecanismul pentru avansul longitudinal al sculei, folosind una din metodele analitice studiate.
Determinarea experimentală a poziţiei, vitezei şi acceleraţiei elementului condus din mecanismul pentru avansul longitudinal al sculei, în timpul ciclului cinematic, folosind aparatură performantă.
2 Echipamente / instrumente utilizate:
Şeping. Traductor inductiv de cursă liniară tip WA300 (firma HBM) - cursă nominală 300 mm. Sistem de achiziţie numerică a mărimilor mecanice - Spider 8, rezoluţie 12 biţi; program
realizat sub mediul de programare TestPoint pentru prelucrarea datelor experimentale. Notebook IBM ThinkPad R51.
3 Rezultate obţinute:
Poziţiile şi vitezele elementului condus din mecanismul pentru avansul longitudinal al sculei, calculate cu una din metodele analitice studiate, pentru un unghi dat şi o turaţie impusă elementului conducător
Diagramele cinematice ale poziţiilor, vitezelor şi acceleraţiilor, obţinute pe cale experimentală, pentru diverse turaţii ale elementului conducător
Compararea rezultatelor teoretice cu cele experimentale Justificarea posibilelor erori apărute la rezultate
4 Desfăşurarea lucrării 4.1 Mecanismul pentru avansul longitudinal al sculei şepingului 4.1.1 Schema cinematică a mecanismului
Pentru acest mecanism se cunosc următoarele date: lungimea elementului conducător AB=0,110 m, lungimea elementului AC=0,484 m, lungimea elementului CD=0,720 m, lungimea elementului DE=0,160 m, unghiul 1 =180 , lungimea ld=0,02 m, lungimea la=0,27 m, turaţia elementului conducător n=29 rot/min .
S-a realizat schema cinematică a mecanismului pentru avansul longitudinal al elementului
condus al şepingului la scara kl= 1/85 [m/mm] (Fig. 1), analizând macheta existentă în laborator şi folosind datele cunoscute prezentate anterior.
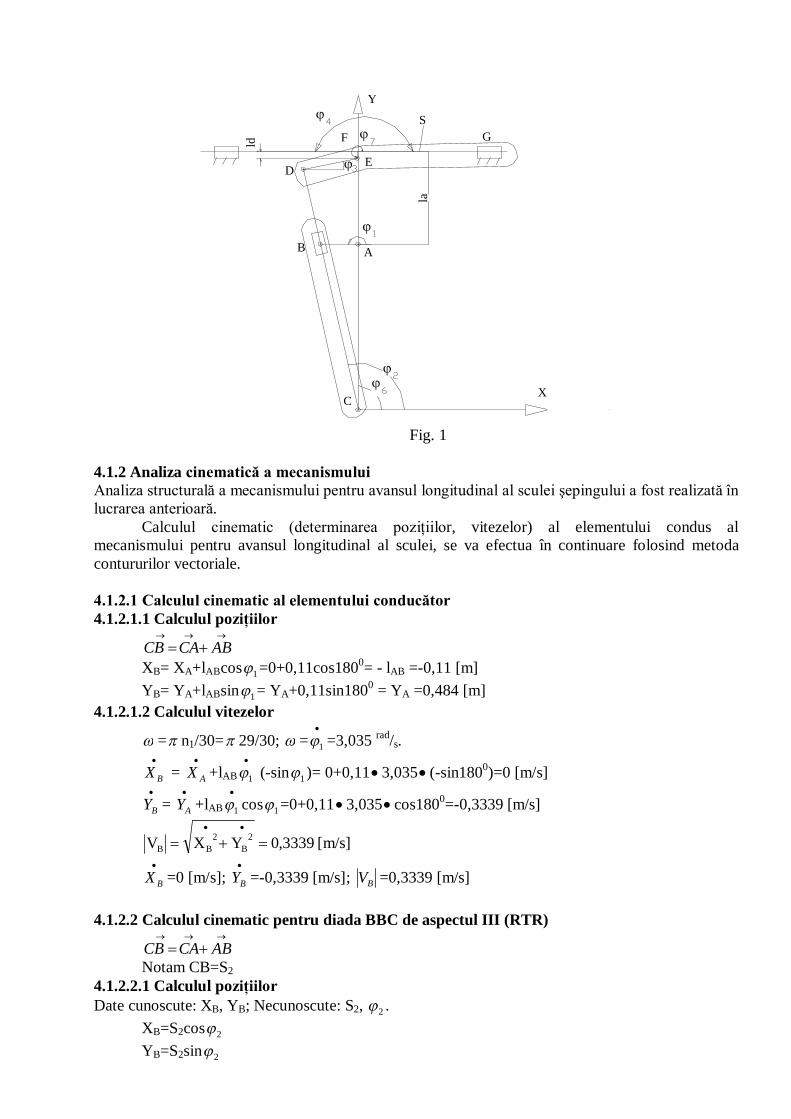
Fig. 1
4.1.2 Analiza cinematică a mecanismului Analiza structurală a mecanismului pentru avansul longitudinal al sculei şepingului a fost realizată în lucrarea anterioară.
Calculul cinematic (determinarea poziţiilor, vitezelor) al elementului condus al mecanismului pentru avansul longitudinal al sculei, se va efectua în continuare folosind metoda contururilor vectoriale. 4.1.2.1 Calculul cinematic al elementului conducător 4.1.2.1.1 Calculul poziţiilor
ABCACB XB= XA+lABcos 1 =0+0,11cos1800= - lAB =-0,11 [m] YB= YA+lABsin 1 = YA+0,11sin1800 = YA =0,484 [m]
4.1.2.1.2 Calculul vitezelor
= n1/30= 29/30; =
1 =3,035 rad/s.
BX =
AX +lAB
1 (-sin 1 )= 0+0,11 3,035 (-sin1800)=0 [m/s]
BY =
AY +lAB
1 cos 1 =0+0,11 3,035 cos1800=-0,3339 [m/s]
3339,0YXV 2B
2BB
[m/s]
BX =0 [m/s];
BY =-0,3339 [m/s]; BV =0,3339 [m/s]
4.1.2.2 Calculul cinematic pentru diada BBC de aspectul III (RTR)
ABCACB Notam CB=S2
4.1.2.2.1 Calculul poziţiilor Date cunoscute: XB, YB; Necunoscute: S2, 2 .
XB=S2cos 2 YB=S2sin 2
B A
DE
C
S
Y
X
F G
la
ld

tg 2 = YB/ XB tg 2 = 0,484/(-0,11) = -4,4
2 = arctg(-4,4)+k Pentru k=1 se determineă valoarea unghiului 2 :
2 =102,804 S2= XB /cos 2 ; S2= (-0,11)/cos102,804 . S2= 0,502 m
4.1.2.2.2 Calculul vitezelor
BX =
2S cos 2 - S2
2 sin 2
BY =
2S sin 2 +S2
2 cos 2
2S = (S2
2 sin 2 +
BX )/cos 2
tg 2 (S2
2 sin 2 +
BX )+S2
2 cos 2 =
BY
2 = [
BY -
BX tg 2 ]/(S2sin 2 tg 2 + S2cos 2 )
2 =-0,33385/(0,502 sin102,804 tg102,804+ 0,502 cos102,804)= -0,33385/(-2,1538-0,11125)=0,33385/2,265=0,1474
2 =0,1474 rot/min
2S =(0,502 0,1474 sin102,804)/cos102,804=0,072/(-0.2216)
2S = -0.325 m/s 4.1.2.3 Calculul cinematic pentru punctul D 4.1.2.3.1 Calculul poziţiilor
XD= lCD cos 2 ; XD= 0,72 (-0,2216)= -0,1595 [m] YD= lCD sin 2 ; YD= 0,72 (0,9751)= 0,702 [m]
4.1.2.3.2 Calculul vitezelor
DX = lCD
2 (-sin 2 );
DX = 0,72 0,1474 (-0,9751)= -0,1035 [m/s]
DY = lCD
2 cos 2 ;
DY = 0,72 0,1474 (-0,2216)= -0,0235 [m/s]
1061,022
DDD YXV [m/s] 4.1.2.3 Calculul cinematic pentru diada DEG de aspectul II (RRT)
CE=CD+DE=CG+GF+FE 4.1.2.3.1Calculul poziţiilor
XE= XD+lDE cos 3 =lCG cos 6 +S3 cos 4 +ld cos 7 YE= YD+lDE sin 3 =lCG sin 6 +S3 sin 4 +ld sin 7 Necunoscute: S3, 3 , XE , YE. S3= [XD+lDE cos 3 - lCG cos 6 - ld cos 7 ]/cos 4 sin 3 = [lCG sin 6 +tg 4 aXD+lDE cos 3 - lCG cos 6 - ld cos 7 s+ld sin 7 -YDS]/lDE lCG= lAC+la=0,484+0,27=0,754 sin 3 = [0,754+0,02 (-1)-0,702]/0,16

3 = arcsin(0,2);
3 = 11,58 S3= 0,0027 m; XE= -0,0027 m; YE=0,734 m.
4.1.2.3.2 Calculul vitezelor
EX =
DX -lDE
3 sin 3 =lCG
6 (-sin 6 )+
3S cos 4 -S3
4 sin 4 -ld
7 sin 7
EY =
DY +lDE
3 cos 3 = lCG
6 cos 6 +
3S sin 4 + S3
4 cos 4 + ld
7 cos 7
Necunoscute:
3S ,
3 ,
EX ,
EY .
DX -lDE
3 sin 3 =lCG
6 (-sin 6 )+
3S cos 4 -S3
4 sin 4 -ld
7 sin 7
DY +lDE
3 cos 3 =lCG
6 cos 6 +
3S sin 4 +S3
4 cos 4 +ld
7 cos 7
3S = [
DX -lDE
3 sin 3 + lCG
6 sin 6 +S3
4 sin 4 +ld
7 sin 7 ]/cos 4
3 = {lCG
6 cos 6 +tg 4 [
DX +lCG
6 sin 6 +S3
4 sin 4 +ld
7 sin 7 ]+
S3
4 cos 4 +ld
7 cos 7 -
DY }/(lDE cos 3 +tg 4 lDE sin 3 )
6 =90 ; 4 =180 ; 7 =270 ;
4 =
6 =
7 =0.
3 =-
DY /lDE cos 3 =+0,025/0,16 cos11,58= 0,149 [rot/min]
3 = 0,149 rot/min
3S = [
DX -lDE
3 sin 3 + lCG
6 sin 6 +S3
4 sin 4 +ld
7 sin 7 ]/cos 4
3S = (-0,1035-0,16 0,149 0,2)/(-1)=0,108;
3S =0,108 m/s
EX =
DX -lDE
3 sin 3 =-0,0235+0,16 0,149 cos11,58=-0,108 [m/s]
EX = -0,108 m/s
EY =
DY +lDE
3 cos 3
EY =-0,0235+0,16 0,149 0,9796 = 0 [m/s]
EY =0 m/s

Montaj experimental
Descriere montaj
Fig.2. Montaj experimental
S-a realizat un montaj pe Sepingul existent in dotarea laboratorului de Mecanisme al Facultatii de Mecanica din Craiova (Fig. 2).
Pentru măsurarea cursei ‘berbecului’ sepingului de acesta a fost fixată tija mobilă a traductorului inductiv de cursă liniara, iar carcasa traductorului a fost fixata de batiul masinii.
Traductorul inductiv de deplasare a fost conectat la intrarea sistemului de achiziţie date Spider 8.
În timpul experimentărilor, turatia motorului a fost reglata la diverse valori, (…14 rot/min, 29 rot/min, …), care au corespuns frecventelor de actionare de 0.251Hz, 0.508Hz, 0.956Hz, 0.677 Hz, 1.337Hz, 1.804Hz, si s-a înregistrat cursa ‘berbecului’ sepingului pentru fiecare dintre acestea.
Frecvenţa de eşantionare a Spider 8 a fost de 2400 Hz.
1.1.1 Prelucrarea datelor experimentale Pentru frecvenţele de acţionare: 0.251Hz, 0.508Hz, 0.956Hz, 0.677 Hz, 1.337Hz, 1.804Hz,
au fost înregistrate cursele de deplasare ale berbecului Sepingului si reprezentate în figurile 9, 13, 17, 21, 25, respectiv figura 29. Cursa este asociată la ordonata din partea stângă a graficului.
Valorile instantanee, în poziţia celor două cursoare, sunt transmise în display-urile din partea inferioară, cele din rândul superior corespunzând cursorului Mark1. Asocierea cu trasele ce face prin culoare.
A fost efectuată derivata numerică a cursei, obţinându-de viteza de translaţie, în fig. 10 ; 14 ; 18, 22, 26, 30, fiind reprezentate în acelaşi grafic cursa şi viteaza. Cursa este reprezentată prin trasa
negru şi este asociată la ordonata din partea stângă a graficului. Viteza este reprezentată prin trasa roşi şi este asociată la ordonata din centru graficului.
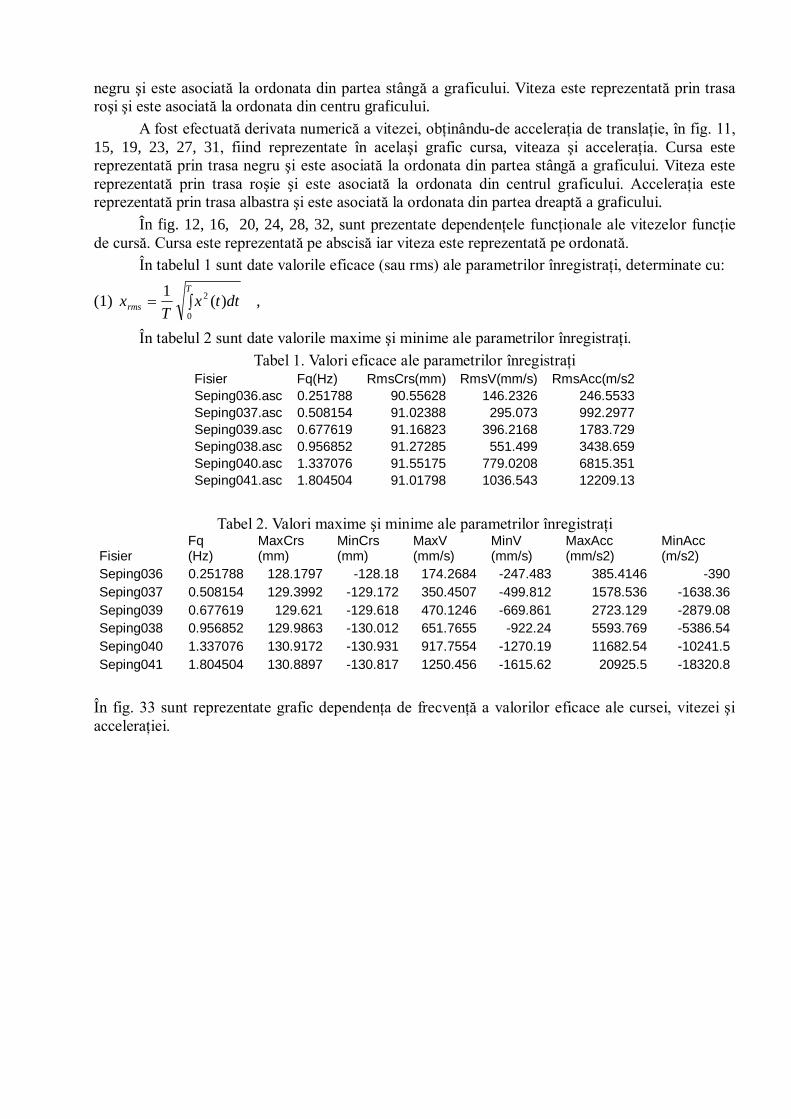
A fost efectuată derivata numerică a vitezei, obţinându-de acceleraţia de translaţie, în fig. 11, 15, 19, 23, 27, 31, fiind reprezentate în acelaşi grafic cursa, viteaza şi acceleraţia. Cursa este reprezentată prin trasa negru şi este asociată la ordonata din partea stângă a graficului. Viteza este reprezentată prin trasa roşie şi este asociată la ordonata din centrul graficului. Acceleraţia este reprezentată prin trasa albastra şi este asociată la ordonata din partea dreaptă a graficului.
În fig. 12, 16, 20, 24, 28, 32, sunt prezentate dependenţele funcţionale ale vitezelor funcţie de cursă. Cursa este reprezentată pe abscisă iar viteza este reprezentată pe ordonată.
În tabelul 1 sunt date valorile eficace (sau rms) ale parametrilor înregistraţi, determinate cu:
(1) T
rms dttxT
x0
2 )(1 ,
În tabelul 2 sunt date valorile maxime şi minime ale parametrilor înregistraţi. Tabel 1. Valori eficace ale parametrilor înregistraţi
Fisier Fq(Hz) RmsCrs(mm) RmsV(mm/s) RmsAcc(m/s2 Seping036.asc 0.251788 90.55628 146.2326 246.5533 Seping037.asc 0.508154 91.02388 295.073 992.2977 Seping039.asc 0.677619 91.16823 396.2168 1783.729 Seping038.asc 0.956852 91.27285 551.499 3438.659 Seping040.asc 1.337076 91.55175 779.0208 6815.351 Seping041.asc 1.804504 91.01798 1036.543 12209.13
Tabel 2. Valori maxime şi minime ale parametrilor înregistraţi
Fisier Fq (Hz)
MaxCrs (mm)
MinCrs (mm)
MaxV (mm/s)
MinV (mm/s)
MaxAcc (mm/s2)
MinAcc (m/s2)
Seping036 0.251788 128.1797 -128.18 174.2684 -247.483 385.4146 -390 Seping037 0.508154 129.3992 -129.172 350.4507 -499.812 1578.536 -1638.36 Seping039 0.677619 129.621 -129.618 470.1246 -669.861 2723.129 -2879.08 Seping038 0.956852 129.9863 -130.012 651.7655 -922.24 5593.769 -5386.54 Seping040 1.337076 130.9172 -130.931 917.7554 -1270.19 11682.54 -10241.5 Seping041 1.804504 130.8897 -130.817 1250.456 -1615.62 20925.5 -18320.8
În fig. 33 sunt reprezentate grafic dependenţa de frecvenţă a valorilor eficace ale cursei, vitezei şi acceleraţiei.
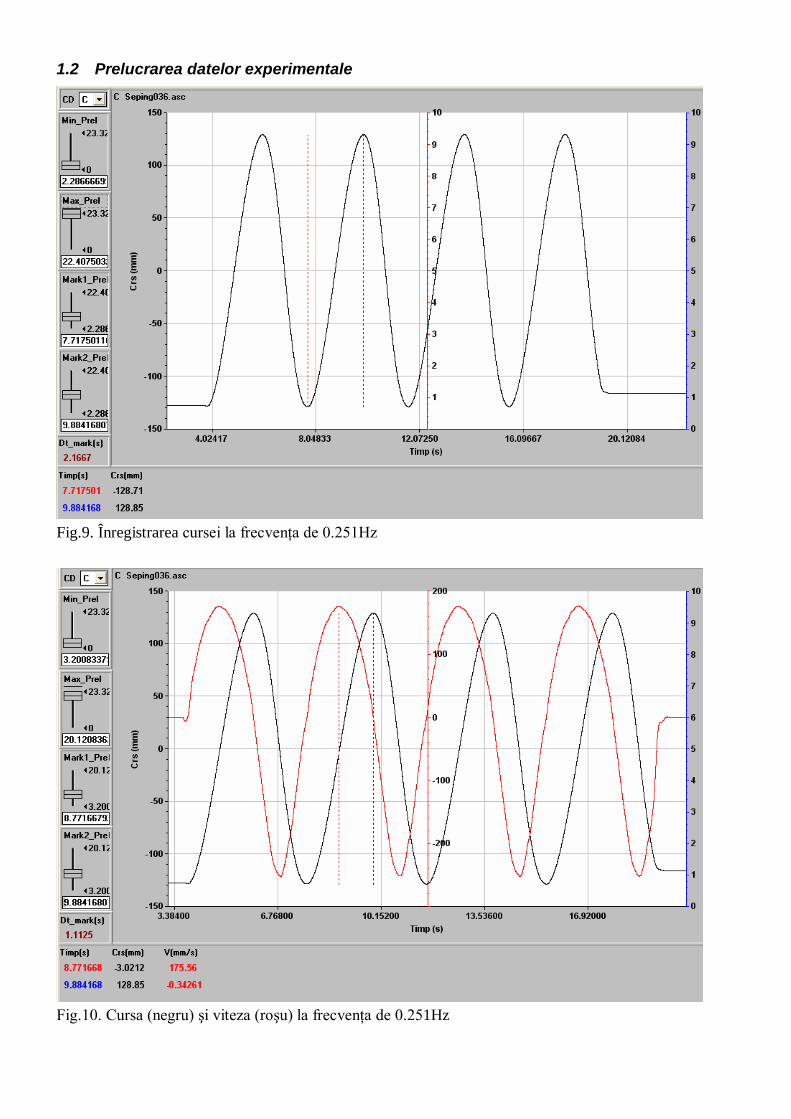
1.2 Prelucrarea datelor experimentale
Fig.9. Înregistrarea cursei la frecvenţa de 0.251Hz
Fig.10. Cursa (negru) şi viteza (roşu) la frecvenţa de 0.251Hz
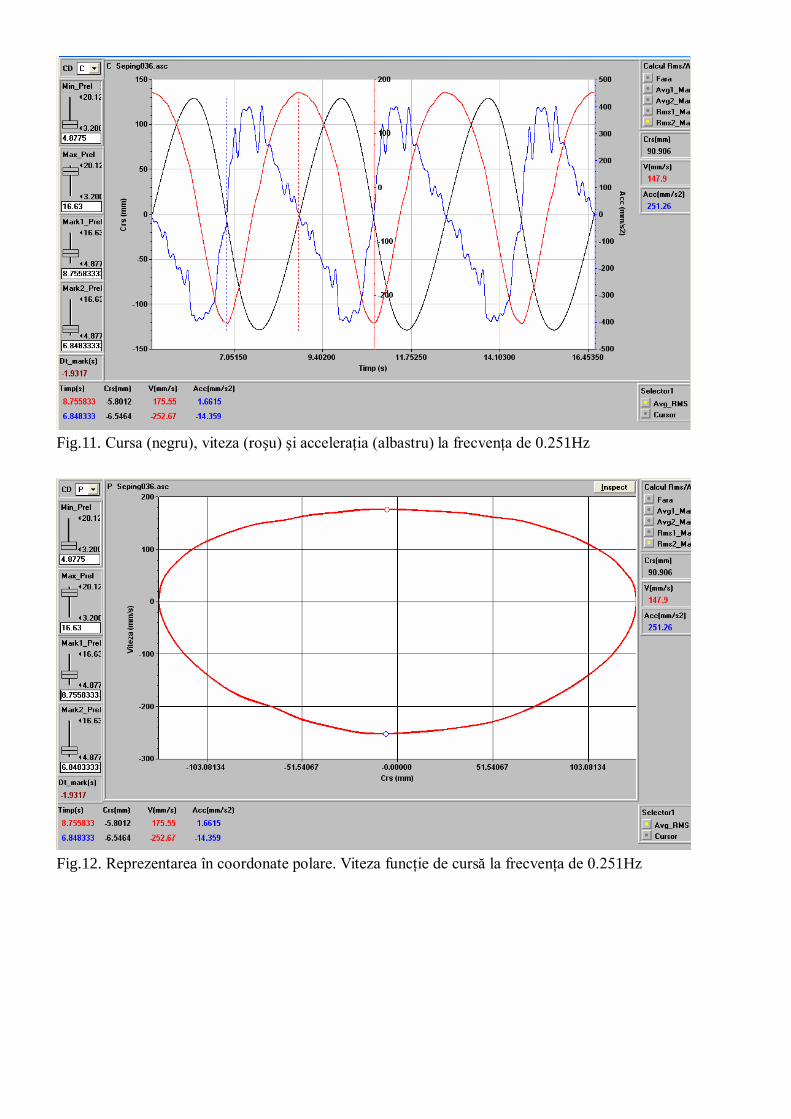
Fig.11. Cursa (negru), viteza (roşu) şi acceleraţia (albastru) la frecvenţa de 0.251Hz
Fig.12. Reprezentarea în coordonate polare. Viteza funcţie de cursă la frecvenţa de 0.251Hz
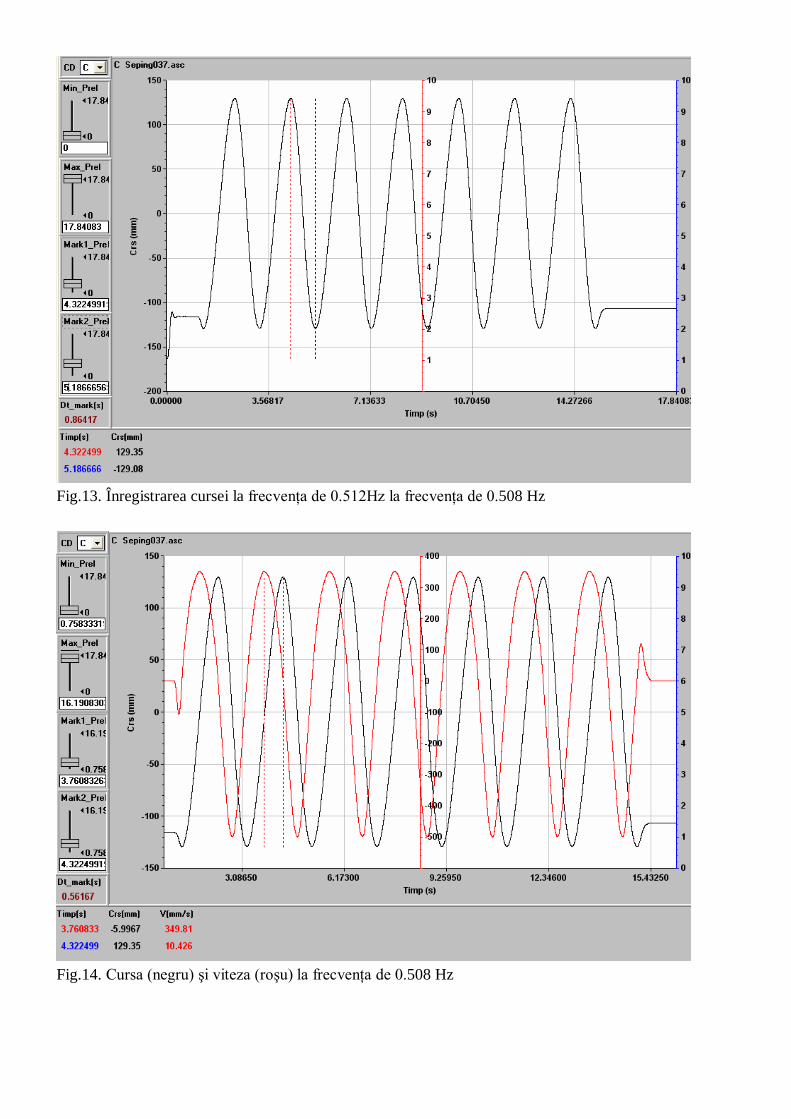
Fig.13. Înregistrarea cursei la frecvenţa de 0.512Hz la frecvenţa de 0.508 Hz
Fig.14. Cursa (negru) şi viteza (roşu) la frecvenţa de 0.508 Hz
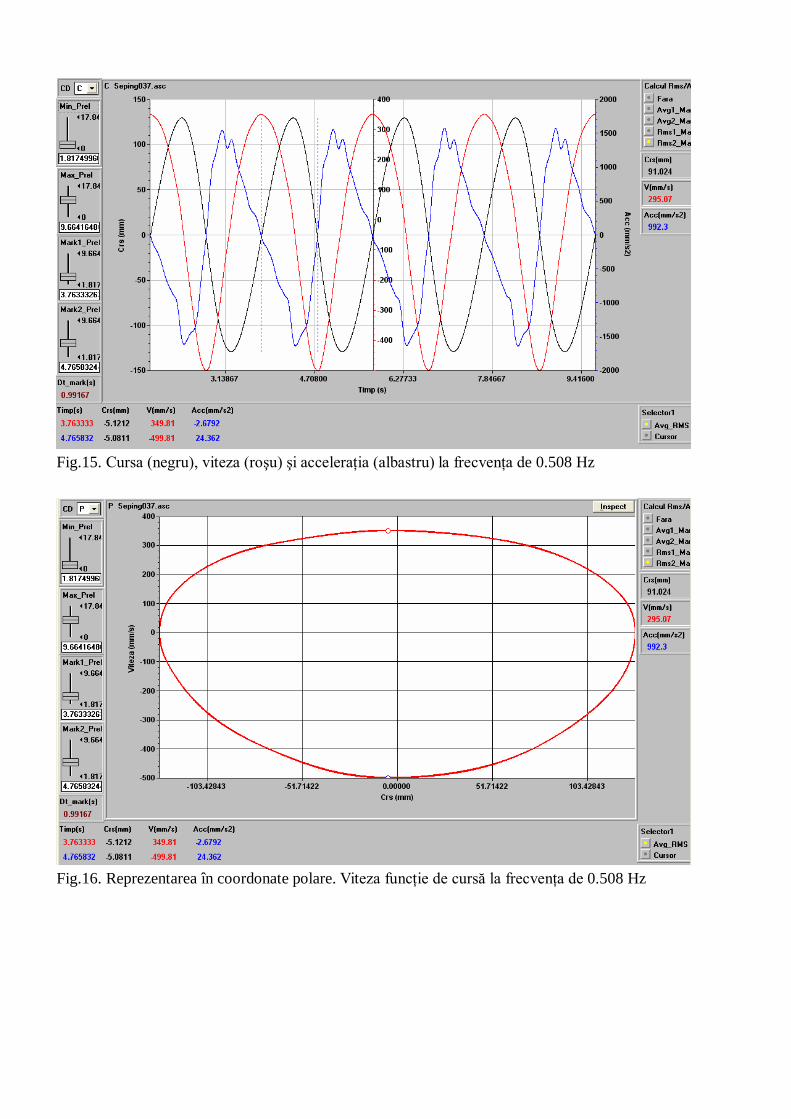
Fig.15. Cursa (negru), viteza (roşu) şi acceleraţia (albastru) la frecvenţa de 0.508 Hz
Fig.16. Reprezentarea în coordonate polare. Viteza funcţie de cursă la frecvenţa de 0.508 Hz
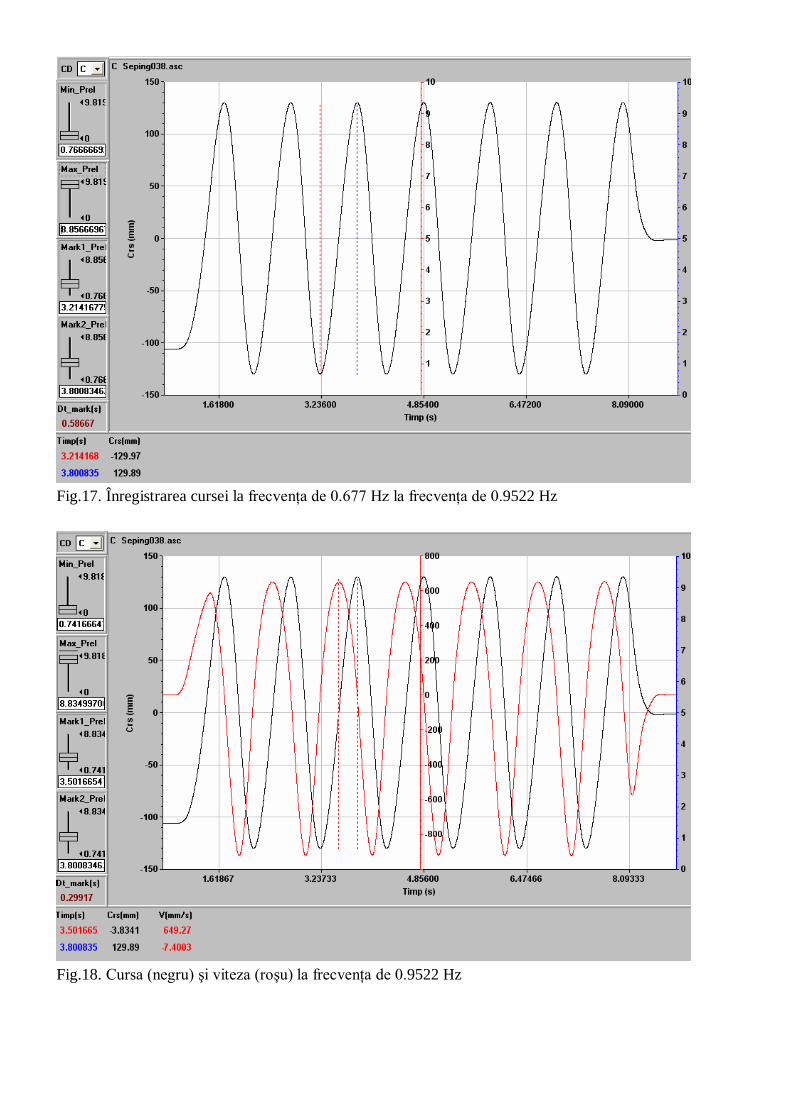
Fig.17. Înregistrarea cursei la frecvenţa de 0.677 Hz la frecvenţa de 0.9522 Hz
Fig.18. Cursa (negru) şi viteza (roşu) la frecvenţa de 0.9522 Hz
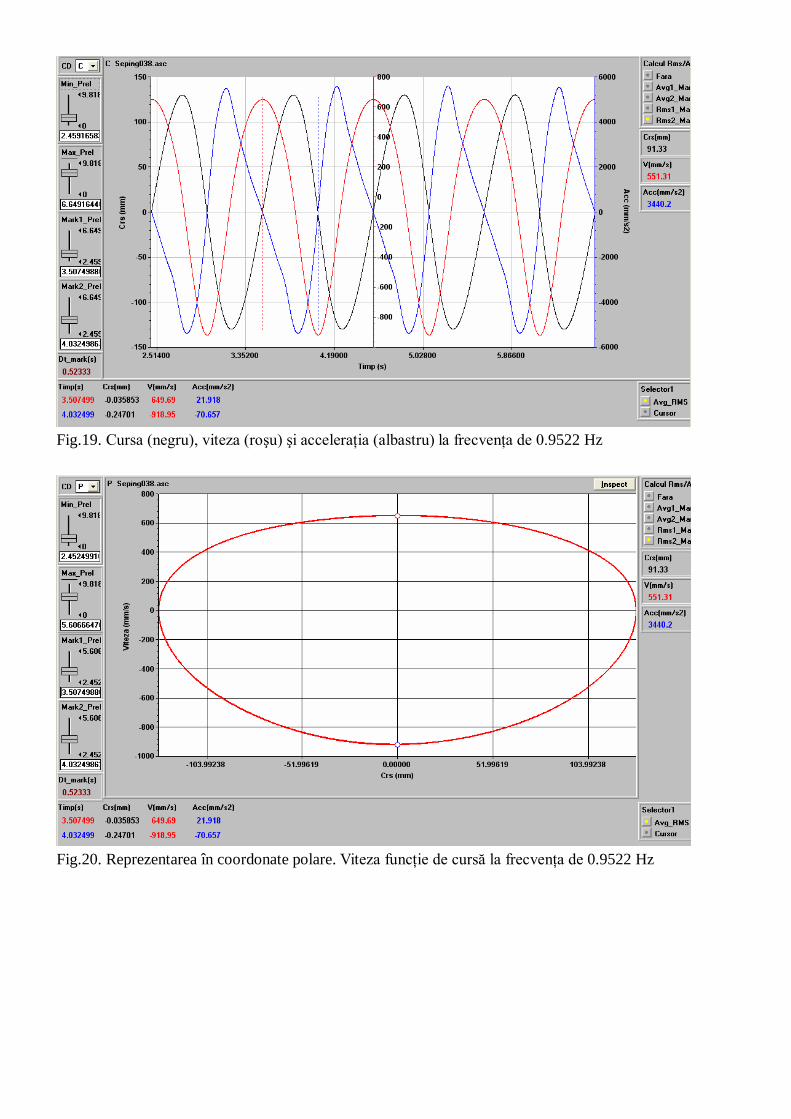
Fig.19. Cursa (negru), viteza (roşu) şi acceleraţia (albastru) la frecvenţa de 0.9522 Hz
Fig.20. Reprezentarea în coordonate polare. Viteza funcţie de cursă la frecvenţa de 0.9522 Hz
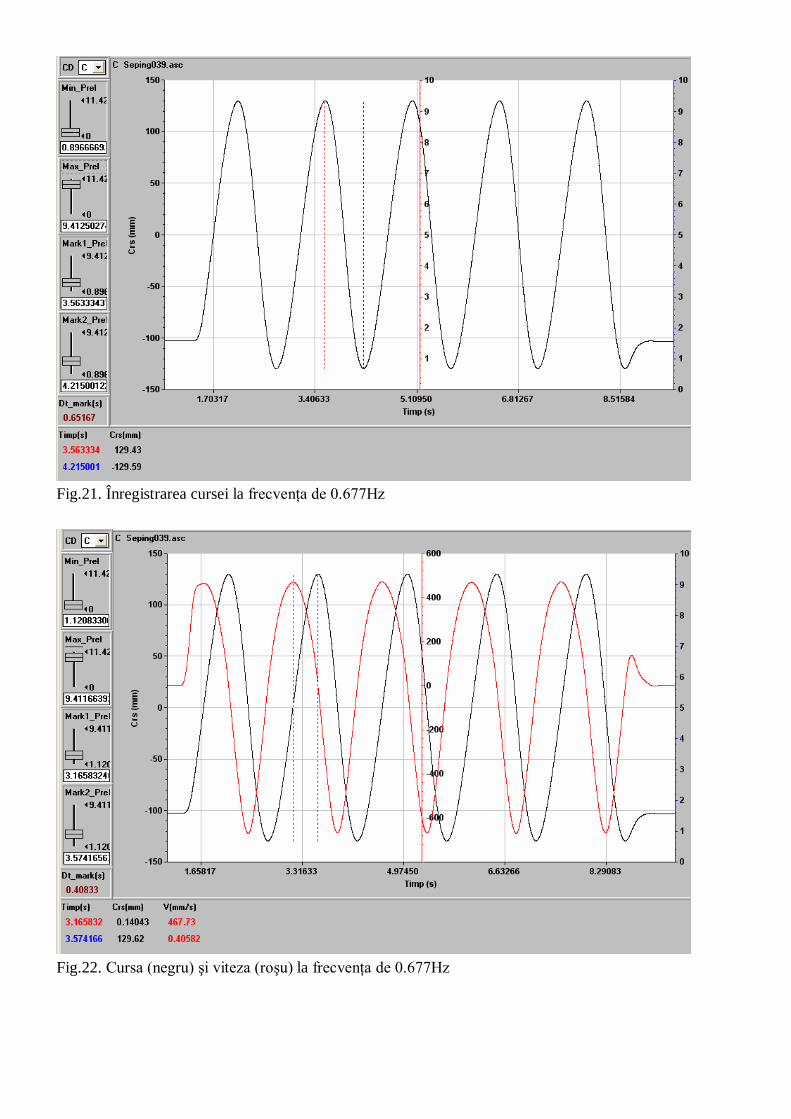
Fig.21. Înregistrarea cursei la frecvenţa de 0.677Hz
Fig.22. Cursa (negru) şi viteza (roşu) la frecvenţa de 0.677Hz
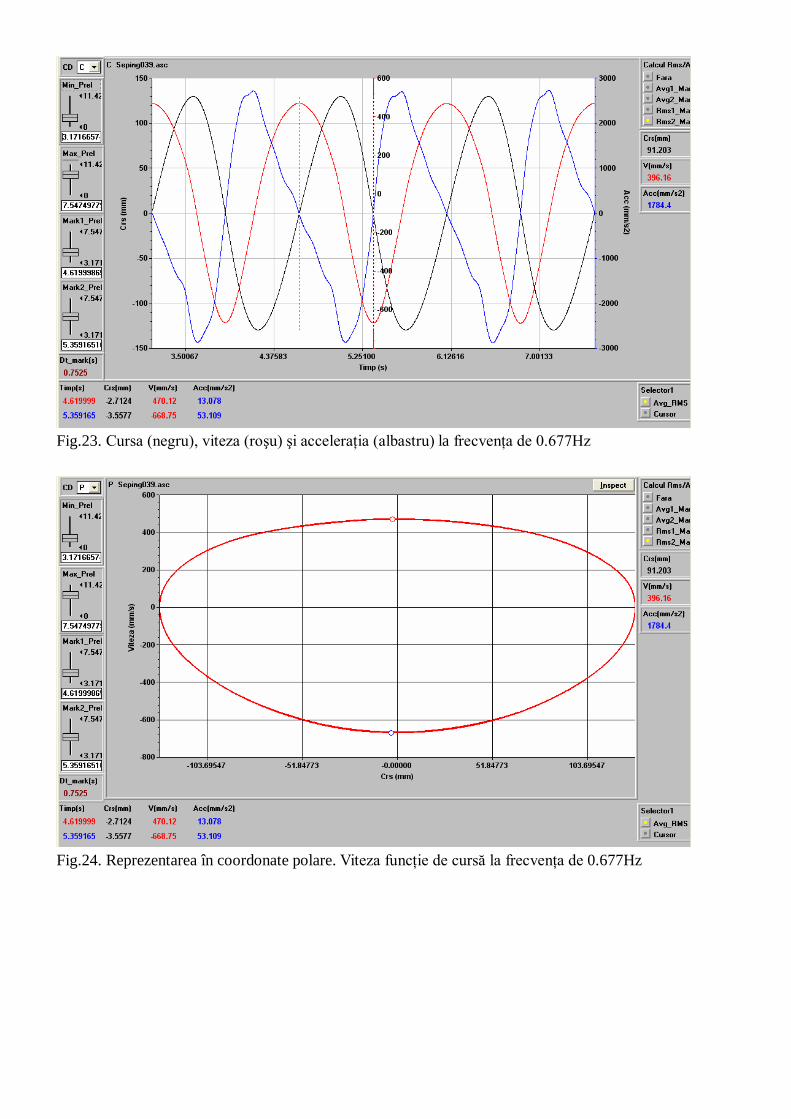
Fig.23. Cursa (negru), viteza (roşu) şi acceleraţia (albastru) la frecvenţa de 0.677Hz
Fig.24. Reprezentarea în coordonate polare. Viteza funcţie de cursă la frecvenţa de 0.677Hz
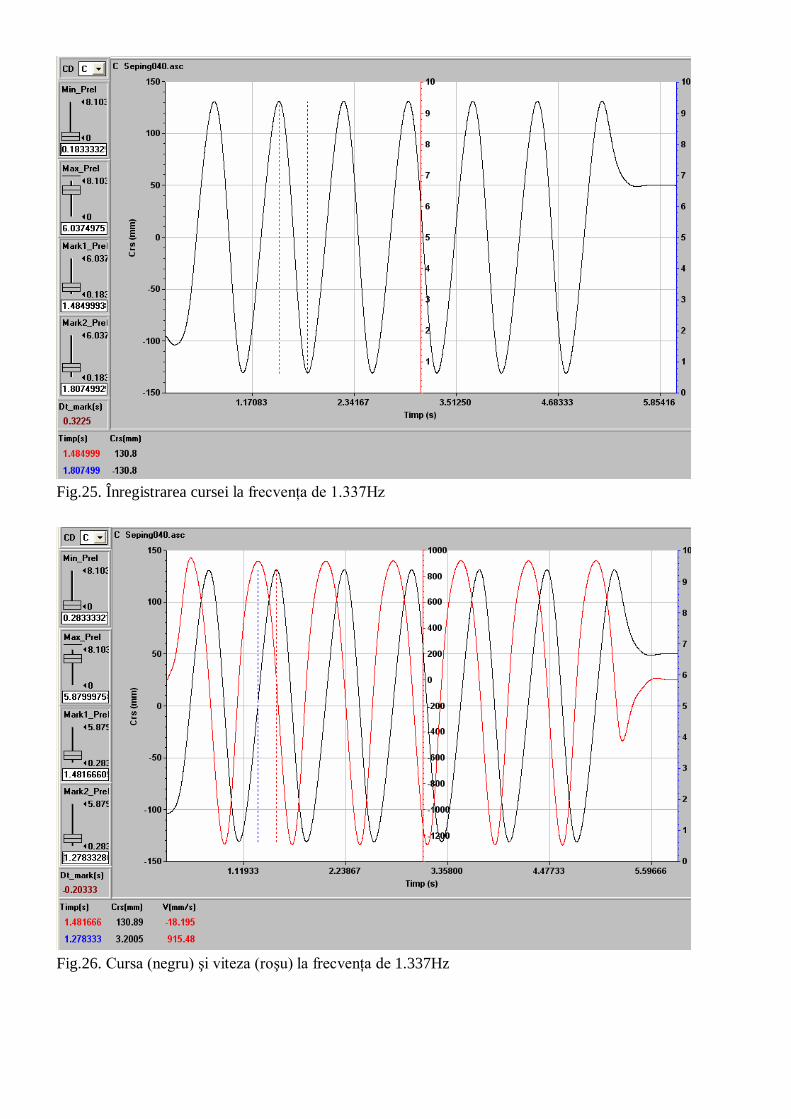
Fig.25. Înregistrarea cursei la frecvenţa de 1.337Hz
Fig.26. Cursa (negru) şi viteza (roşu) la frecvenţa de 1.337Hz
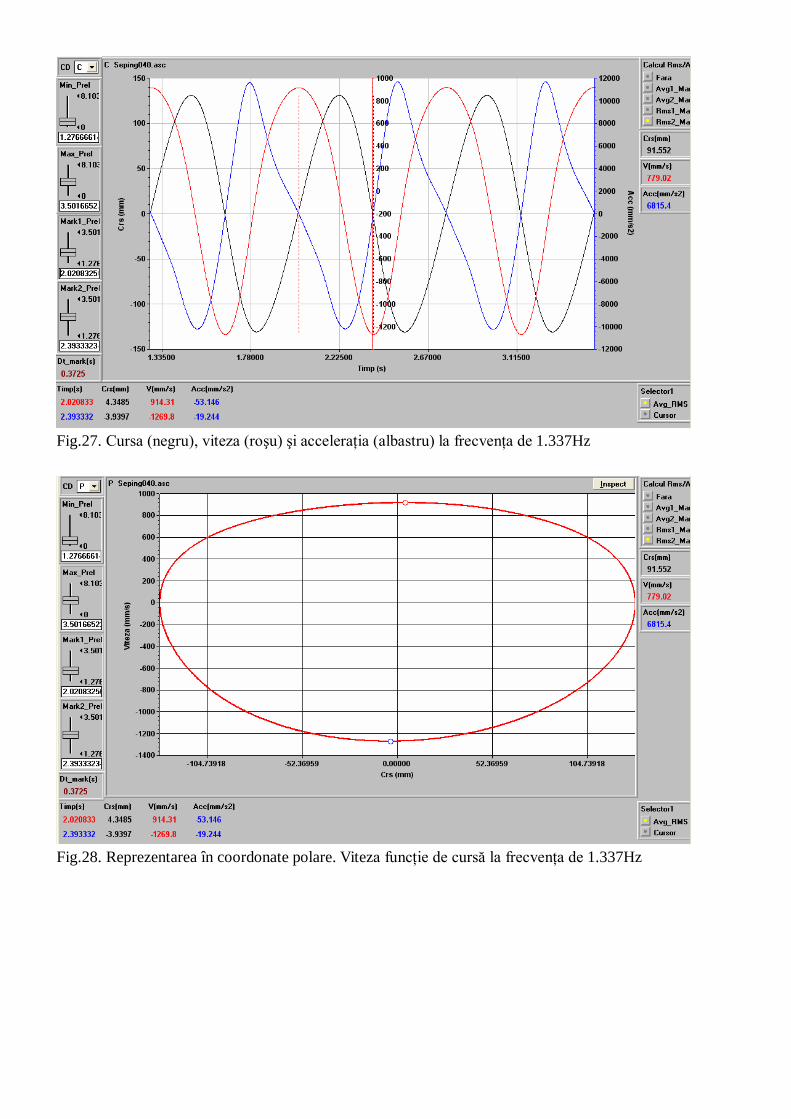
Fig.27. Cursa (negru), viteza (roşu) şi acceleraţia (albastru) la frecvenţa de 1.337Hz
Fig.28. Reprezentarea în coordonate polare. Viteza funcţie de cursă la frecvenţa de 1.337Hz
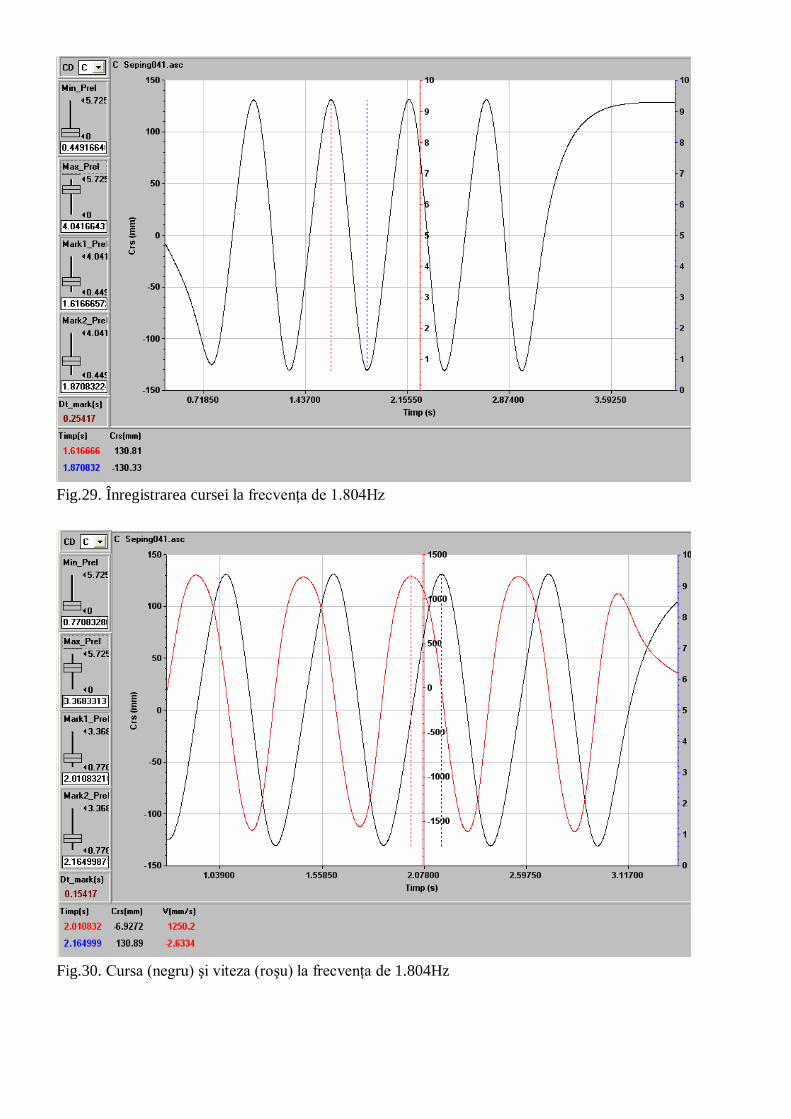
Fig.29. Înregistrarea cursei la frecvenţa de 1.804Hz
Fig.30. Cursa (negru) şi viteza (roşu) la frecvenţa de 1.804Hz
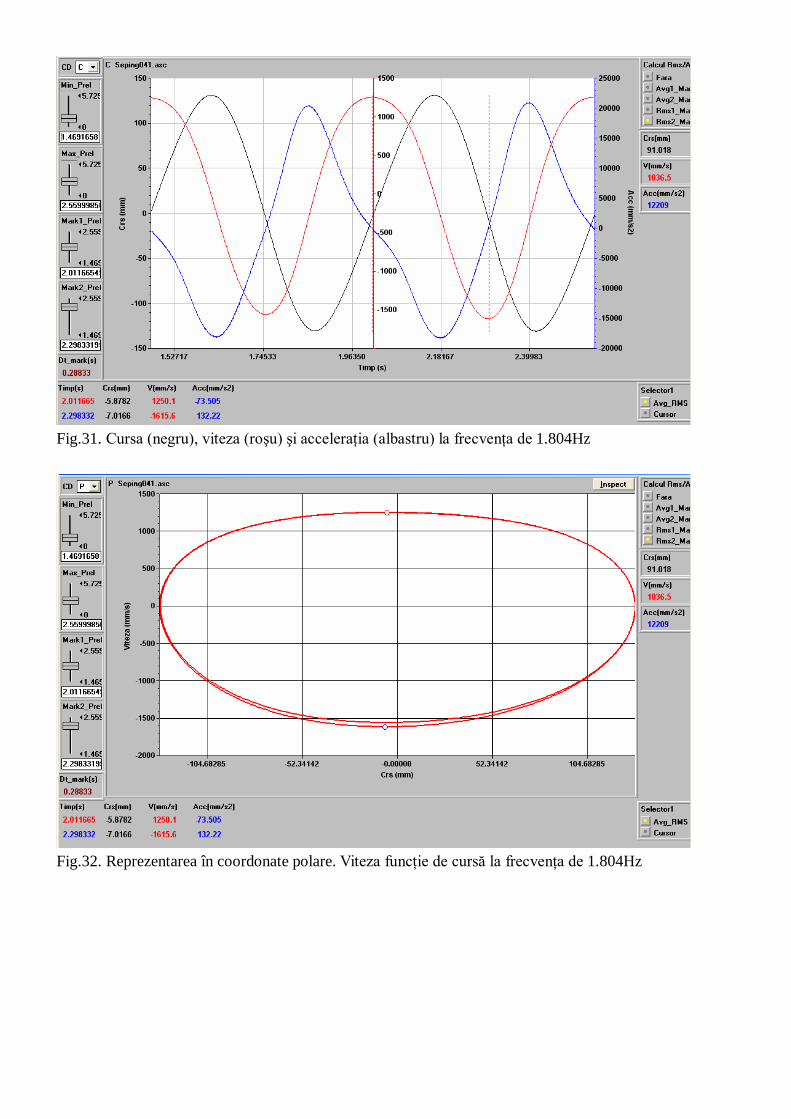
Fig.31. Cursa (negru), viteza (roşu) şi acceleraţia (albastru) la frecvenţa de 1.804Hz
Fig.32. Reprezentarea în coordonate polare. Viteza funcţie de cursă la frecvenţa de 1.804Hz