analiz a matematic a - usab-tm.ro codruta... · 1 serii numerice 1.1 de nit˘ii. exemple de...
TRANSCRIPT
Analiza matematica
Chis Codruta

2
Cuprins
1 Serii numerice 5
1.1 Definitii. Exemple . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Criterii de convergenta pentru serii cu termeni pozitivi . . . 8
1.3 Criterii de convergenta pentru serii cu termeni oarecare . . . 16
1.4 Probleme propuse . . . . . . . . . . . . . . . . . . . . . . . . 21
2 Serii de puteri 23
2.1 Suma unei serii de puteri . . . . . . . . . . . . . . . . . . . . 28
2.2 Operatii cu serii de puteri . . . . . . . . . . . . . . . . . . . 29
2.3 Derivarea seriilor de puteri . . . . . . . . . . . . . . . . . . . 29
2.4 Integrarea seriilor de puteri . . . . . . . . . . . . . . . . . . 30
2.5 Probleme propuse . . . . . . . . . . . . . . . . . . . . . . . . 31
3 Formula lui Taylor 35
3.1 Serii Taylor pentru functii de doua variabile . . . . . . . . . 38
3.2 Probleme propuse . . . . . . . . . . . . . . . . . . . . . . . . 38
4 Notiuni de topologie ın Rn 41
5 Functii de mai multe variabile 45
5.1 Definitii. Exemple . . . . . . . . . . . . . . . . . . . . . . . 45
5.2 Probleme propuse . . . . . . . . . . . . . . . . . . . . . . . . 46
6 Limite. Continuitate 49
6.1 Limita unei functii ıntr-un punct . . . . . . . . . . . . . . . 49
6.2 Continuitate . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
6.3 Probleme propuse . . . . . . . . . . . . . . . . . . . . . . . . 53
3

4 CUPRINS
7 Derivate partiale 55
7.1 Derivate partiale de ordinul ıntai . . . . . . . . . . . . . . . 55
7.2 Derivate partiale de ordin superior . . . . . . . . . . . . . . 57
7.3 Gradient. Diferentiala . . . . . . . . . . . . . . . . . . . . . 59
7.3.1 Diferentierea functiilor compuse . . . . . . . . . . . . 62
7.4 Hessiana unei functii ıntr-un punct . . . . . . . . . . . . . . 64
7.5 Probleme propuse . . . . . . . . . . . . . . . . . . . . . . . . 65
8 Extreme locale ale functiilor de mai multe variabile 67
8.1 Extreme neconditionate . . . . . . . . . . . . . . . . . . . . 68
8.2 Extreme conditionate . . . . . . . . . . . . . . . . . . . . . . 71
8.3 Probleme propuse . . . . . . . . . . . . . . . . . . . . . . . . 75
9 Elemente de calcul integral 77
9.1 Primitive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
9.1.1 Primitive reductibile la primitivele functiilor rationale 79
9.2 Functii integrabile. Integrala definita . . . . . . . . . . . . . 80
9.3 Aplicatii ale integralelor definite . . . . . . . . . . . . . . . . 83
9.3.1 Aria subgraficului unei functii continue si pozitive . . 83
9.3.2 Lungimea graficului unei functii derivabile cu derivata
continua . . . . . . . . . . . . . . . . . . . . . . . . . 83
9.3.3 Volumul unui corp de rotatie . . . . . . . . . . . . . . 84
9.3.4 Aria suprafetelor de rotatie . . . . . . . . . . . . . . 84
9.3.5 Centre de greutate . . . . . . . . . . . . . . . . . . . 84
10 Ecuatii diferentiale 87
10.1 Introducere ın teoria ecuatiilor diferentiale . . . . . . . . . . 87
10.2 Ecuatii diferentiale de ordinul I . . . . . . . . . . . . . . . . 89
10.2.1 Ecuatii cu variabile separabile . . . . . . . . . . . . . 89
10.2.2 Ecuatii diferentiale omogene . . . . . . . . . . . . . . 92
10.2.3 Ecuatii diferentiale liniare de ordinul I . . . . . . . . 93
10.2.4 Ecuatii diferentiale de tip Bernoulli . . . . . . . . . . 95
10.3 Modele matematice ale cresterii populatiei . . . . . . . . . . 97
10.3.1 Modelul lui Malthus . . . . . . . . . . . . . . . . . . 97
10.3.2 Modelul lui Verhulst . . . . . . . . . . . . . . . . . . 97

1
Serii numerice
1.1 Definitii. Exemple
Definitie. Fie (an)n≥1 un sir de numere reale si sn =∑ni=1 ai, n ≥ 1. Cu-
plul ((an)n≥1, (sn)n≥1) se numeste serie numerica si se noteaza∑n≥1 an sau∑
n an sau∑∞n=1 an.
• Elementul an se numeste termen general al seriei, elementele sirului (an)n≥1
se numesc termenii seriei;
• elementele sirului (sn)n≥1 se numesc sumele partiale ale seriei, iar elemen-
tul sn se numeste suma partiala de rang n.
Definitie. O serie de numere reale∑n≥1 an se numeste convergenta daca
sirul (sn)n≥1 al sumelor partiale este convergent; daca sirul sumelor partiale
are limita, aceasta limita se numeste suma seriei, si scriem
limn−→∞
sn = s =⇒∑n≥1
an = s.
In particular,
limn−→∞
sn =∞ =⇒∑n≥1
an =∞,
limn−→∞
sn = −∞ =⇒∑n≥1
an = −∞.
Daca sirul sumelor partiale nu are limita, atunci seria se numeste oscilanta.
Daca o serie este oscilanta sau are suma ±∞, ea se numeste divergenta.
Exemplu. Daca r ∈ R este un numar real, seria∑∞n=0 r
n se numeste seria
geometrica de ratie r.
5

6 1. SERII NUMERICE
Fie r = 1. Atunci suma partiala de ordin n a seriei geometrice este
sn = 1 + 1 + . . .+ 1︸ ︷︷ ︸n+1
= n+ 1.
Deoarece limn−→∞(n+ 1) =∞, seria∑∞n=0 1n este diveregenta.
Pentru r 6= 1, suma partiala de ordin n a seriei geometrice este
sn =1− rn+1
1− r.
Propozitie. Fie∑∞n=0 r
n o serie geometrica.
(i) Daca |r| < 1, atunci seria geometrica este convergenta , cu suma
1
1− r.
(ii) Daca |r| ≥ 1, atunci seria geometrica este divergenta.
Demonstratie. (i) Daca |r| < 1, atunci limn−→∞ rn+1 = 0, astfel ca
limn−→∞ sn = 11−r , deci seria este convergenta, cu suma 1
1−r .
(ii) Daca |r| > 1, atunci limn−→∞ |r|n+1 =∞, deci suma este divergenta.
Daca r = 1, am vazut mai sus ca seria geometrica diverge.
Daca r = −1, atunci sirul sumelor partiale alterneaza ıntre valorile 0 s1,
deci si aceasta serie este divergenta.
Exemplu. 1− 23
+ (23)2 − · · · = ∑∞
n=1(−23)n = 1
1−(− 23
)= 3
5.
Observatie. Uneori, asa cum am vazut si ın exemplele de mai sus, primul
termen al unei serii nu este neaparat a1.∑∞n=1(1
2)n si
∑∞n=2
1lnn
sunt exemple
de asemenea serii. In al doilea caz, trebuie sa ıncepem cu n = 2, deoarece1
ln 1nu este definit.
Exemplu. Putem scrie numarul 13
ca
1
3= 0, 33333 . . . =
3
10+
3
100+
3
1000+ . . .+
3
10n+ . . . .
Aceasta expresie este o serie, avand termenul general an = 310n
. Putem
demonstra ca aceasta serie este convergenta:
3
10+
3
100+
3
1000+ . . .+
3
10n+ . . . =
3
10(1 +
1
10+
1
100+ . . .+
1
10n+ . . .) =
=3
10
∞∑k=0
(1
10)k =
3
10· 1
1− 110
=3
10· 10
9=
3
9=
1
3.

1.1. DEFINITII. EXEMPLE 7
De altfel, orice numar subunitar x poate fi gandit ca suma unei serii con-
vergente, deoarece daca x = 0, a1a2a3 . . . an . . ., atunci
x =a1
10+
a2
100+
a3
1000+ . . .+
an10n
+ . . . =∞∑n=1
an10n
.
O conditie necesara de convergenta a unei serii numerice este urmatoarea:
Propozitie. Fie∑n≥1 an o serie convergenta de numere reale. Atunci sirul
(an)n≥1 este convergent la 0.
Demonstratie. Fie s =∑∞k=1 ak. Pentru doua sume partiale consecutive
avem atunci
sn =n∑k=1
= (a1 + a2 + . . .+ an−1) + an = sn−1 + an,
deci
an = sn − sn−1.
Atunci
limn−→∞
an = limn−→∞
(sn − sn−1) = limn−→∞
sn − limn−→∞
sn−1 = s− s = 0.
Rezulta atunci urmatoarea conditie suficienta de divergenta:
Corolar. Fie∑n≥1 an o serie de numere reale. Daca sirul (an)n≥1 nu are
limita sau are limita nenula, atunci seria data este divergenta.
Observatie. Daca∑n≥1 an este o serie pentru care limn−→∞ an = 0, nu
rezulta neaparat ca seria data este convergenta.
Contraexemplu. Seria armonica∑n≥1
1n
este divergenta, cu suma∑n≥1
1n
=
∞, ın ciuda faptului ca limn→∞1n
= 0:
Sa presupunem ca seria data ar fi convergenta cu suma∑n≥1
1n
= s. Fie
sn = 1 +1
2+ · · ·+ 1
n.
Rezulta deci ca limn→∞ sn = s. Dar
s2n − sn =1
n+ 1+
1
n+ 2+ · · ·+ 1
2n>
1
2n+
1
2n+ · · ·+ 1
2n︸ ︷︷ ︸n
= n · 1
2n=
1
2
si obtinem ca
s2n >1
2+ sn , (∀)n ≥ 1.
8 1. SERII NUMERICE
Trecand la limita ın ultima relatie, obtinem:
s ≥ 1
2+ s,
ceea ce este absurd. Prin urmare presupunerea facuta nu poate fi adevarata,
deci seria armonica este divergenta.
O proprietate importanta a seriilor convergente este urmatoarea:
Propozitie. Fie∑n≥1 an si
∑n≥1 bn doua serii convergente cu sumele s,
respectiv t, si fie α, β ∈ R. Atunci seria∑n≥1(αan + βbn) este convergenta
si are suma αs+ βt.
Demonstratie. Fie sn, respectiv tn, sumele partiala de rang n ale celor
doua serii. Atunci suma partiala de rang n a seriei∑n≥1(αan + βbn) este
αsn + βtn, si avem
limn−→∞
(αsn + βtn) = α limn−→∞
sn + β limn−→∞
tn = αs+ βt.
Corolar. Presupunem ca seria∑n≥1(αan + βbn) este convergenta pentru
anumite constante α, β ∈ R∗. Atunci∑n≥1 an este convergenta daca si nu-
mai daca∑n≥1 bn este convergenta.
Observatie. Din convergenta seriei∑n≥1(αan + βbn) nu rezulta ınsa
convergenta seriilor∑n≥1 an si
∑n≥1 bn.
Contraexemplu. Seria∑n≥1((−1)n + (−1)n+1) este convergenta, ın timp
ce seriile∑n≥1(−1)n si
∑n≥1(−1)n+1 sunt divergente.
1.2 Criterii de convergenta pentru serii cu
termeni pozitivi
Definitie. Spunem ca seria∑n≥1 an este cu termeni pozitivi daca orice
termen al sa este pozitiv: an > 0, (∀)n ≥ 1.
Propozitie. Sirul sumelor partiale ale unei serii cu termeni pozitivi este
strict crescator.
Demonstratie. Fie (sn)n≥1 sirul sumelor partiale ale unei serii cu termeni
pozitivi∑n≥1 an. Atunci
sn+1 − sn = an+1 =⇒ sn+1 > sn,∀n ≥ 1,
1.2. CRITERII DE CONVERGENTA PENTRU SERII CU TERMENI POZITIVI9
deci sirul (sn) este crescator.
Corolar. O serie cu termeni pozitivi are ıntotdeauna suma(finita sau nu).
Cateva criterii pentru studiul seriilor cu termeni pozitivi sunt:
C1) Seria∑n≥1 an cu termeni pozitivi este convergenta daca si numai daca
sirul (sn)n≥1 al sumelor partiale este marginit.
Demonstratie. Sirul (sn) al sumelor partiale este monoton, astfel ca el
este convergent daca si numai daca este marginit. Proprietatea enuntata
rezulta atunci imediat.
C2) Primul criteriu al comparatiei.
Fie∑n≥1 an,
∑n≥1 bn doua serii de numere reale nenegative, astfel ıncat
(∃)n0 ∈ N : an ≤ bn, (∀)n ≥ n0.
Atunci au loc proprietatile:
(a)∑n≥1 bn convergenta =⇒ ∑
n≥1 an convergenta.
(b)∑n≥1 an divergenta =⇒ ∑
n≥1 bn divergenta.
Demonstratie. Daca notam cu sn, respectiv tn, sumele partiale de rang n
ale seriilor∑n≥1 an si
∑n≥1 bn, atunci din inegalitatea din enunt rezulta ca
sn − sn0 ≤ tn − tn0 , (∀)n ≥ n0.
(a) Daca seria∑n≥1 bn este convergenta, atunci limn−→∞ tn < ∞, de unde
rezulta ca limn−→∞ sn = tn + sn0 − tn0 <∞, deci∑n≥1 an este convergenta.
(b) Daca seria∑n≥1 an este divergenta, atunci limn−→∞ sn = ∞, de unde
rezulta ca limn−→∞ tn = sn + tn0 − sn0 =∞, deci∑n≥1 bn este divergenta.
Exemplu. Sa studiem convergenta sau divergenta seriei∑∞n=1
1√n.
Deoarece 1√n≥ 1
n, (∀)n ≥ 1, si deoarece seria
∑∞n=1
1n
este divergenta,
rezulta ca∑∞n=1
1√n
este divergenta.
Exemplu. Vom studia natura seriei∑∞n=1
1n!
.
Daca n ≥ 4, atunci n! ≥ 2n, deci 1n!≤ 1
2n. Deoarece seria
∑∞n=1
12n
este o
serie geometrica, cu ratia 12< 1, ea este convergenta, de unde rezulta ca

10 1. SERII NUMERICE
seria∑∞n=1
1n!
este convergenta.
Observatie. Daca pentru un numar natural oarecare N , seria∑∞n=N+1 an
este convergenta, atunci seria∑∞n=1 an este convergenta. De asemenea,
daca seria∑∞n=N+1 an este divergenta, atunci seria
∑∞n=1 an este divergenta.
Adunarea unui numar finit de termeni la o serie nu afecteaza deci
convergenta sau divergenta seriei.
Definitie. Spunem ca doua serii de numere reale∑n≥1 an,
∑n≥1 bn au
aceeasi natura daca ambele sunt convergente sau ambele sunt divergente.
Notatie. Notam acest lucru prin∑n≥1 an ∼
∑n≥1 bn
C3) Al doilea criteriu al comparatiei.
Fie∑n≥1 an,
∑n≥1 bn doua serii de numere reale nenegative astfel ıncat
limn→∞
anbn
= l.
Atunci au loc urmatoarele:
(a) Daca 0 < l <∞, cele doua serii au aceeasi natura.
(b) Daca l = 0 si∑n≥1 bn este convergenta, atunci
∑n≥1 an este convergenta.
(c) Daca l =∞ si∑n≥1 bn este divergenta, atunci
∑n≥1 an este divergenta.
Demonstratie. (a) Deoarece limn→∞anbn
= l, exista un numar natu-
ral N , astfel ıncat anbn∈ (l − l
2, l + l
2), (∀)n ≥ N . Prin urmare au loc
l2bn ≤ an ≤ 3l
2bn, (∀)n ≥ N . Deoarece seria
∑n≥1 bn are evident aceeasi
natura ca si seriile∑n≥1
l2bn si
∑n≥1
3l2bn, pe baza primului criteriu de
comparatie rezulta afirmatia din enunt.
(b) Daca l = 0, atunci exista un numar natural N , cu proprietatea caanbn< 1, (∀)n ≥ N . Dar atunci an < bn, (∀)n ≥ N , de unde aplicand primul
criteriu de comparatie se obtine proprietatea enuntata.
(c) Daca l = ∞, atunci exista un numar natural N , cu proprietatea caanbn> 1, (∀)n ≥ N . Dar atunci an > bn, (∀)n ≥ N , de unde aplicand primul
criteriu de comparatie se obtine proprietatea enuntata.
Exemplu. Vom arata ca∑n≥1
nn2+1
este divergenta.
Fie an = nn2+1
, bn = 1n. Atunci limn→∞
anbn
= 1, deci seriile∑n≥1 an si∑
n≥1 bn au aceeasi natura . Dar∑n≥1
1n
este divergenta, deci si∑n≥1
nn2+1
este divergenta.

1.2. CRITERII DE CONVERGENTA PENTRU SERII CU TERMENI POZITIVI11
C4) Al treilea criteriu al comparatiei.
Fie∑n≥1 an,
∑n≥1 bn doua de numere reale nenegative, astfel ıncat :
(∃)n0 ∈ N :an+1
an≤ bn+1
bn, (∀)n ≥ n0.
Atunci au loc proprietatile:
(a)∑n≥1 bn convergenta =⇒ ∑
n≥1 an convergenta.
(b)∑n≥1 an divergenta =⇒ ∑
n≥1 bn divergenta.
Demonstratie. Inegalitatea
an+1
an≤ bn+1
bn, (∀)n ≥ n0
poate fi transcrisa ın forma
an+1
bn+1
≤ anbn, (∀)n ≥ n0,
de unde rezulta ca anbn≤ an0
bn0, (∀)n ≥ n0, adica
anan0
≤ bnbn0
, (∀)n ≥ n0.
Deoarece seriile∑n≥1 an si
∑n≥1
anan0
, respectiv∑n≥1 bn si
∑n≥1
bnbn0
au aceeasi
natura, din ultima inegalitate si primul criteriu de comparatie rezulta afirmatiile
din enunt.
C5) Criteriul condensarii.
Fie∑n≥1 an o serie de numere reale pozitive, ai carei termeni formeaza un
sir descrescator, convergent catre 0. Atunci seria∑n≥1 an are aceeasi natura
ca si seria∑n≥0 2na2n .
Demonstratie. Deoarece sirul sumelor partiale al seriei∑n≥1 an este
monoton, seria este convergenta daca si numai daca sirul sumelor partiale
este marginit, sau, ceea ce este echivalent(datorita monotoniei), daca si nu-
mai daca sirul sumelor partiale are un subsir marginit.
Deoarece sirul (an) este descrescator, avem inegalitatile
2ka2k ≥ s2k+1 − s2k ≥ 2ka2k+1 , (∀)k ∈ N.
Adunand inegalitatile acestea pentru k = 0, n− 1, obtinem atunci
n−1∑k=0
2ka2k ≥ s2n ≥1
2
n∑k=1
2ka2k , (∀)n ∈ N.

12 1. SERII NUMERICE
Din primul criteriu de comparatie deducem atunci ca seriile∑n≥1 an si∑
n≥0 2na2n au aceeasi natura.
Aplicatie(Seriile armonice generalizate).
Fie α > 0 un numar real pozitiv. Seria∑n≥1
1nα
se numeste seria armonica
generalizata de grad α. Termenii ei sunt pozitivi si descresc catre 0, astfel
ca putem folosi criteriul condensarii pentru a studia convergenta ei. Prin
urmare ∑n≥1
1
nα∼∑n≥0
2n1
(2n)α.
Studiem acum seria∑n≥0 2n 1
(2n)α. Avem
∑n≥0
2n1
(2n)α=∑n≥0
(2
2α
)n=∑n≥0
(1
2α−1
)n.
Aceasta este o serie geometrica, de ratie 12α−1 . Ea este convergenta daca si
numai daca ratia este subunitara. Aceasta conditie este ın cazul nostru
1
2α−1< 1⇐⇒ 2α−1 > 1⇐⇒ α− 1 > 0⇐⇒ α > 1.
Am obtinut deci urmatorul rezultat:
Seria armonica generalizata de grad α este
convergenta, daca α > 1
divergenta, daca α ≤ 1
C6) Criteriul radacinii(al lui Cauchy).
Fie∑n≥1 an o serie de numere reale pozitive si fie l = lim n
√an. Atunci:
(a) Daca l < 1, seria∑n≥1 an este convergenta.
(b) Daca l > 1, seria∑n≥1 an este divergenta.
(c) Daca l = 1, natura seriei∑n≥1 an poate fi oricare.
Demonstratie. (a) Daca l < 1, atunci exista n0 ∈ N cu proprietatea ca
n√an <
l+12, (∀)n ≥ n0. Dar atunci are loc
an <
(l + 1
2
)n, (∀)n ≥ n0.
Deoarece seria∑∞n=1( l+1
2)n este geometrica, cu ratia subunitara, ea este o
serie convergenta, si atunci din primul criteriu de comparatie rezulta ca seria∑∞n=1 an este convergenta.
(b) Daca l > 1, atunci pentru orice n0 ∈ N fixat putem gasi n ∈ N cu

1.2. CRITERII DE CONVERGENTA PENTRU SERII CU TERMENI POZITIVI13
n ≥ n0 astfel ıncat an > 1. Dar atunci nu putem avea limn−→∞ an = 0.
Prin urmare, conform criteriului necesar de convergenta, seria∑∞n=1 an nu
este convergenta.
(c) Daca l = 1, este suficient sa indicam doua serii cu aceasta proprietate,
dintre care una sa fie convergenta, iar cealalta sa fie divergenta. Consideram
seriile∑∞n=1
1n
si∑∞n=1
1n2 . Deoarece pentru orice functie polinomiala P cu
coeficientul dominant pozitiv are loc
limn−→∞
n
√P (n) = 1,
rezulta ca lim n
√1n
= lim n
√1n2 = 1, dar prima serie este divergenta, iar a doua
convergenta.
In foarte multe situatii este utila urmatoarea
C6’) Varianta practica a criteriului radacinii
Fie∑n≥1 an o serie de numere reale pozitive astfel ıncat exista limita l =
limn−→∞ n√an. Atunci:
(a) Daca l < 1, seria∑n≥1 an este convergenta.
(b) Daca l > 1, seria∑n≥1 an este divergenta.
(c) Daca l = 1, natura seriei∑n≥1 an poate fi oricare.
Exemplu.∑n≥1
nα
2neste convergenta, ∀α ∈ R.
Intr-adevar,
n√an = n
√nα
2n−→ 1
2< 1 =⇒
=⇒∑n≥1
nα
2nconvergenta.
Exemplu.∑n≥2
1(lnn)n
este convergenta.
Observam ın primul rand ca seria ıncepe de la n = 2 deoarece 1(ln 1)1
nu este
definit.
n√an = n
√1
(lnn)n=
1
lnn−→ 0 < 1 =⇒
=⇒∑n≥2
1
(lnn)nconvergenta.
C7) Criteriul raportului(al lui d’Alembert).
Fie∑n≥1 an o serie de numere reale pozitive. Atunci:

14 1. SERII NUMERICE
(a) Daca liman+1
an< 1, seria
∑n≥1 an este convergenta.
(b) Daca (∃)n0 ∈ N, astfel ıncat an+1
an≥ 1, (∀)n ≥ n0 seria
∑n≥1 an este
divergenta.
(c) Daca liman+1
an= 1, natura seriei
∑n≥1 an poate fi oricare.
Demonstratie. (a) Daca liman+1
an< 1, atunci exista n0 ∈ N astfel ıncat
an+1
an< l+1
2, (∀)n ≥ n0. Dar atunci
an+1
an<l + 1
2=
( l+12
)n+1
( l+12
)n, (∀)n ≥ n0.
Deoarece seria∑∞n=1( l+1
2)n este convergenta, din al treilea criteriu de convergenta
rezulta ca seria∑n≥1 an este convergenta.
(b) Daca (∃)n0 ∈ N, astfel ıncat an+1
an≥ 1, (∀)n ≥ n0, atunci rezulta ca
an ≥ an0 , (∀)n ≥ n0. Dar atunci nu putem avea limn−→∞ an = 0. Prin
urmare, conform criteriului necesar de convergenta, seria∑∞n=1 an nu este
convergenta.
(c) Seriile∑∞n=1
1n
si∑∞n=1
1n2 au proprietatea ca liman+1
an= 1. Prima dintre
ele este divergenta, iar a doua este convergenta.
Ca ın cazul criteriului radacinii, si pentru criteriul raportului avem o
C7’) Varianta practica a criteriului raportului
Fie∑n≥1 an o serie de numere reale pozitive astfel ıncat exista limita l =
limn−→∞an+1
an. Atunci:
(a) Daca l < 1, seria∑n≥1 an este convergenta.
(b) Daca l > 1, seria∑n≥1 an este divergenta.
(c) Daca l = 1, natura seriei∑n≥1 an poate fi oricare.
Exemplu. Aratam ca∑n≥1
n2n
este convergenta.
Cu notatia an = n2n
, avem
an+1
an=n+ 1
2n−→ 1
2< 1 =⇒
=⇒∑n≥1
n
2nconvergenta.
C8) Criteriul lui Kummer.
Fie∑n≥1 an o serie de numere reale pozitive.

1.2. CRITERII DE CONVERGENTA PENTRU SERII CU TERMENI POZITIVI15
(a) Daca exista un sir (tn) de numere pozitive, un numar r > 0 si n0 ∈ N
cu proprietatea ca
tnanan+1
− tn+1 ≥ r, (∀)n ≥ n0,
atunci seria∑n≥1 an este convergenta.
(b) Daca exista un sir (tn) de numere pozitive cu proprietatea ca seria∑∞n=1
1tn
este divergenta si un numar natural n0 ∈ N cu proprietatea ca
tnanan+1
− tn+1 ≤ 0, (∀)n ≥ n0,
atunci seria∑n≥1 an este divergenta.
Demonstratie. (a) Din inegalitatea tnanan+1− tn+1 ≥ r, deducem ca
ran+1 ≤ tnan − tn+1an+1, (∀)n ≥ n0,
de unde obtinem sirul de inegalitati
ran0+1 ≤ tn0an0 − tn0+1an0+1
ran0+2 ≤ tn0+1an0+1 − tn0+2an0+2
. . . . . . . . .
ran+1 ≤ tnan − tn+1an+1.
Adunand aceste inegalitati, obtinem ca
r(sn − sn0) ≤ tn0an0 − tn+1an+1 ≤ tn0an0 , (∀)n ≥ n0,
deci
sn ≤ sn0 +1
rtn0an0 , (∀)n ≥ n0,
adica sirul sumelor partiale este marginit, si cum el este si monoton crescator,
este convergent. Seria∑n≥1 an este deci convergenta.
(b) Inegalitatea tnanan+1
− tn+1 ≤ 0 este echivalenta cu anan+1
≤ tn+1
tnsau
tntn+1≤ an+1
an. Deoarece seria
∑∞n=1
1tn
este divergenta, din al treilea criteriu
de comparatie rezulta ca seria∑n≥1 an este divergenta.
C9) Criteriul lui Raabe si Duhamel.
Fie∑n≥1 an o serie de numere reale pozitive.
(a) Daca exista un numar ρ > 1 si un numar natural n0 ∈ N astfel ıncat
n
(anan+1
− 1
)≥ ρ, (∀)n ≥ n0,

16 1. SERII NUMERICE
atunci seria∑n≥1 an este convergenta.
(b) Daca exista un numar natural n0 ∈ N astfel ıncat
n
(anan+1
− 1
)≤ 1, (∀)n ≥ n0,
atunci seria∑n≥1 an este divergenta.
Demonstratie. Aplicam criteriul lui Kummer, considerand sirul tn = n.
Putem scrie
tnanan+1
− tn+1 = n
(anan+1
− 1
)− 1.
(a) Notand r = ρ− 1, avem r > 0 si este ındeplinita conditia
tnanan+1
− tn+1 ≥ r, (∀)n ≥ n0,
care conform criteriului lui Kummer ne asigura convergenta seriei date.
(b) Daca n(
anan+1− 1
)≤ 1, (∀)n ≥ n0, atunci
tnanan+1
− tn+1 ≤ 0, (∀)n ≥ n0,
si seria∑n≥1 an este divergenta.
Varianta practica a criteriului Raabe-Duhamel
Fie∑n≥1 an o serie de numere reale pozitive si sa presupunem ca exista
l = limn−→∞ n( anan+1− 1). Atunci:
(a) Daca l > 1, atunci seria∑n≥1 an este convergenta.
(b) Daca l < 1, atunci seria∑n≥1 an este divergenta.
(c) Daca l = 1, natura seriei∑n≥1 an poate fi oricare.
1.3 Criterii de convergenta pentru serii cu
termeni oarecare
Definitie. O serie∑n≥1 an de numere reale se numeste serie absolut con-
vergenta daca are proprietatea ca seria∑n≥1 |an| este convergenta. O serie
convergenta∑n≥1 an cu proprietatea ca seria
∑n≥1 |an| este divergenta se
numeste serie semiconvergenta.

1.3. CRITERII DE CONVERGENTA PENTRU SERII CU TERMENI OARECARE17
Definitie. Un sir (un)n≥1 se numeste sir fundamental(sau sir Cauchy) daca
este satisfacuta urmatoarea conditie:
(∀)ε > 0 =⇒ (∃)nε :| un+p − un |< ε, (∀)n ≥ nε, p ∈ N.
Se poate demonstra ca un sir de numere reale este convergent daca si numai
daca este fundamental. In cazul seriilor obtinem atunci urmatorul criteriu
de convergenta:
C1) Criteriul lui Cauchy.
Fie∑n≥1 an o serie de numere reale. Atunci
∑n≥1 an este convergenta daca
si numai daca
(∀)ε > 0 =⇒ (∃)nε ≥ 1 :
∣∣∣∣∣∣n+p∑
k=n+1
ak
∣∣∣∣∣∣ < ε, (∀)n ≥ nε, p ∈ N.
Corolar. Orice serie absolut convergenta este convergenta.
Corolar. Printr-o permutare a termenilor unei serii absolut convergente se
obtine tot o serie absolut convergenta, avand aceeasi suma.
C2) Criteriul lui Abel.
Daca seria de numere reale∑n≥1 an are sirul sumelor partiale (sn)n≥1 marginit,
iar (αn)n≥1 este un sir de numere pozitive descrescator la 0, atunci seria∑n≥1 αn · an este convergenta.
Definitie. O serie∑n≥1 an se numeste serie alternanta daca are loc relatia
an · an+1 < 0, (∀)n ≥ 1. O asemenea serie se scrie
u1 − u2 + u3 − u4 + . . .+ u2n−1 − u2n + . . . ,
unde un > 0, (∀)n ≥ 1 sau un < 0, (∀)n ≥ 1.
Pentru serii alternante are loc urmatorul criteriu de convergenta:
C3) Criteriul lui Leibniz.
Fie∑n≥1(−1)nan o serie alternanta de numere reale. Daca sirul (an)n≥1
este monoton convergent la zero, atunci seria este convergenta.

18 1. SERII NUMERICE
Exemplu. Seria∑n≥1(−1)n 1
neste convergenta, deoarece sirul ( 1
n)n≥1 de-
screste catre zero.

1.3. CRITERII DE CONVERGENTA PENTRU SERII CU TERMENI OARECARE19
CRITERII DE CONVERGENTA
(Tabel recapitulativ)
Criterii Descriere Exemple si comentarii
Criteriul de Seria∑∞n=0 r
n este∑∞n=0
12n
este
convergenta • convergenta, cu suma convergenta, cu suma 2
pentru seriile 11−r daca |r| < 1
geometrice • divergenta daca |r| ≥ 1∑∞n=0 2n este divergenta
Criteriul Daca (an)n≥1 nu converge Daca an −→ 0 atunci
suficient la 0, atunci∑∞n=0 an
∑∞n=0 an poate fi
de divergenta este divergenta. convergenta(∑∞n=0
1n2 )
sau divergenta(∑∞n=0
1n)
Criteriul • Daca 0 ≤ an ≤ bn, (∀)n Nu este necesar ca
comparatiei (sau an+1
an≤ bn+1
bn, (∀)n) an ≤ bn(sau an+1
an≤ bn+1
bn,
si∑∞n=0 bn este convergenta, etc.) pentru toti n ∈ N,
atunci∑∞n=0 an ci doar pentru n ≥ N ,
este convergenta. unde N ∈ N este fixat
• Daca 0 ≤ bn ≤ an, (∀)n (convergenta sau
(sau an+1
an≥ bn+1
bn, (∀)n) divergenta unei serii
si∑∞n=0 bn este divergenta, nu este afectata
atunci∑∞n=0 an de valorile primilor
este divergenta. catorva termeni)
Criteriul de∑∞
n=01nα este Seriile armonice
convergenta divergenta daca α ≤ 1 generalizate se folosesc
pentru serii convergenta daca α > 1. pentru studiul naturii
armonice unor serii cu ajutorul
generalizate criteriilor de comparatie
20 1. SERII NUMERICE
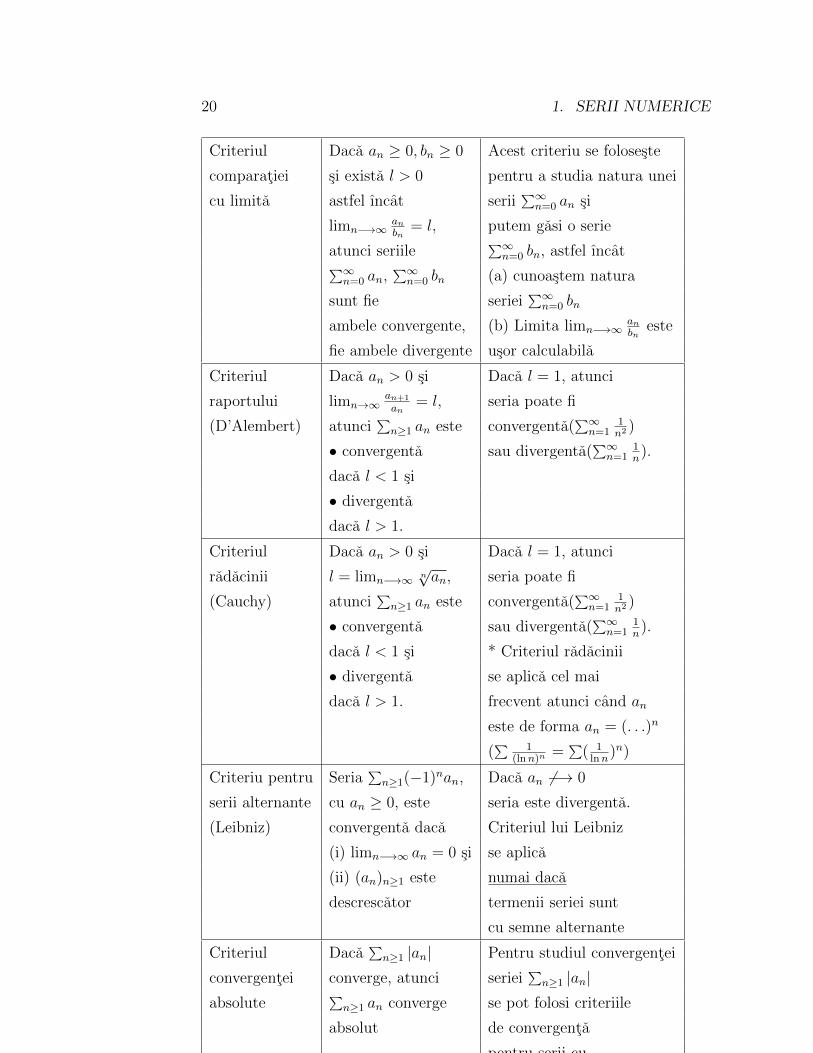
Criteriul Daca an ≥ 0, bn ≥ 0 Acest criteriu se foloseste
comparatiei si exista l > 0 pentru a studia natura unei
cu limita astfel ıncat serii∑∞n=0 an si
limn−→∞anbn
= l, putem gasi o serie
atunci seriile∑∞n=0 bn, astfel ıncat∑∞
n=0 an,∑∞n=0 bn (a) cunoastem natura
sunt fie seriei∑∞n=0 bn
ambele convergente, (b) Limita limn−→∞anbn
este
fie ambele divergente usor calculabila
Criteriul Daca an > 0 si Daca l = 1, atunci
raportului limn→∞an+1
an= l, seria poate fi
(D’Alembert) atunci∑n≥1 an este convergenta(
∑∞n=1
1n2 )
• convergenta sau divergenta(∑∞n=1
1n).
daca l < 1 si
• divergenta
daca l > 1.
Criteriul Daca an > 0 si Daca l = 1, atunci
radacinii l = limn−→∞ n√an, seria poate fi
(Cauchy) atunci∑n≥1 an este convergenta(
∑∞n=1
1n2 )
• convergenta sau divergenta(∑∞n=1
1n).
daca l < 1 si * Criteriul radacinii
• divergenta se aplica cel mai
daca l > 1. frecvent atunci cand an
este de forma an = (. . .)n
(∑ 1
(lnn)n=∑
( 1lnn
)n)
Criteriu pentru Seria∑n≥1(−1)nan, Daca an 6−→ 0
serii alternante cu an ≥ 0, este seria este divergenta.
(Leibniz) convergenta daca Criteriul lui Leibniz
(i) limn−→∞ an = 0 si se aplica
(ii) (an)n≥1 este numai daca
descrescator termenii seriei sunt
cu semne alternante
Criteriul Daca∑n≥1 |an| Pentru studiul convergentei
convergentei converge, atunci seriei∑n≥1 |an|
absolute∑n≥1 an converge se pot folosi criteriile
absolut de convergenta
pentru serii cu
termeni pozitivi
1.4. PROBLEME PROPUSE 21
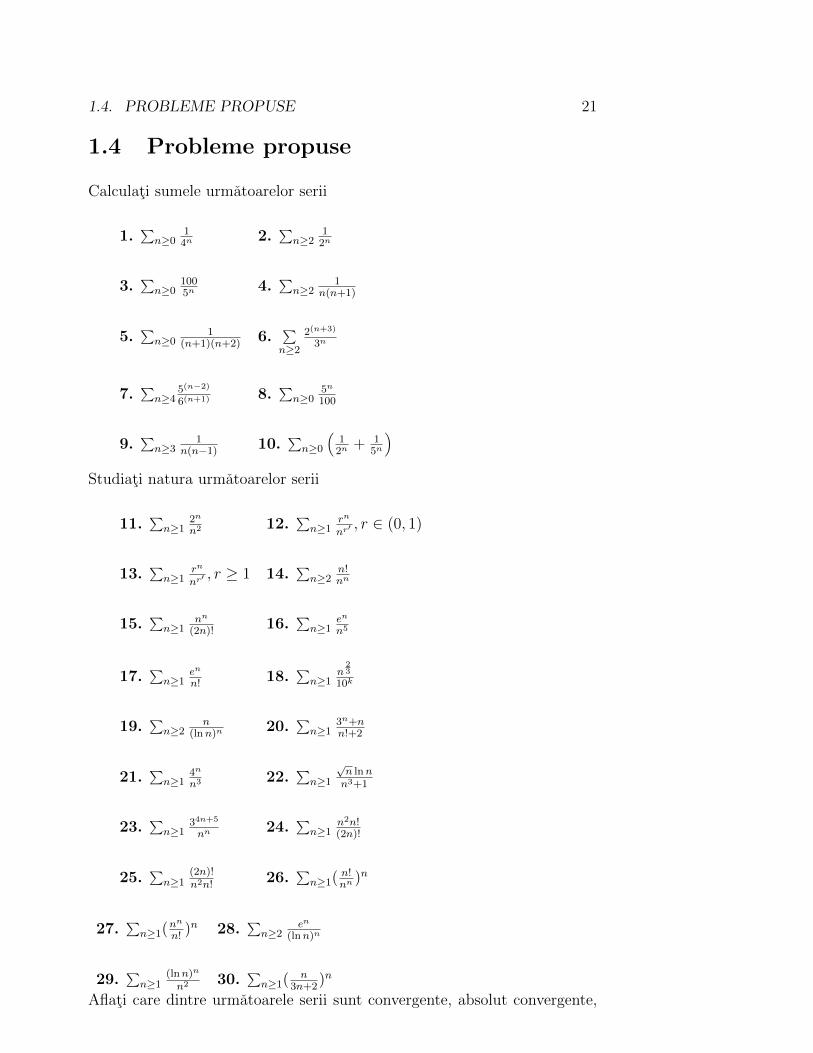
1.4 Probleme propuse
Calculati sumele urmatoarelor serii
1.∑n≥0
14n
2.∑n≥2
12n
3.∑n≥0
1005n
4.∑n≥2
1n(n+1)
5.∑n≥0
1(n+1)(n+2)
6.∑n≥2
2(n+3)
3n
7.∑n≥4
5(n−2)
6(n+1) 8.∑n≥0
5n
100
9.∑n≥3
1n(n−1)
10.∑n≥0
(1
2n+ 1
5n
)Studiati natura urmatoarelor serii
11.∑n≥1
2n
n2 12.∑n≥1
rn
nr′, r ∈ (0, 1)
13.∑n≥1
rn
nr′ , r ≥ 1 14.
∑n≥2
n!nn
15.∑n≥1
nn
(2n)!16.
∑n≥1
en
n5
17.∑n≥1
en
n!18.
∑n≥1
n23
10k
19.∑n≥2
n(lnn)n
20.∑n≥1
3n+nn!+2
21.∑n≥1
4n
n3 22.∑n≥1
√n lnnn3+1
23.∑n≥1
34n+5
nn24.
∑n≥1
n2n!(2n)!
25.∑n≥1
(2n)!n2n!
26.∑n≥1( n!
nn)n
27.∑n≥1(n
n
n!)n 28.
∑n≥2
en
(lnn)n
29.∑n≥1
(lnn)n
n2 30.∑n≥1( n
3n+2)n
Aflati care dintre urmatoarele serii sunt convergente, absolut convergente,
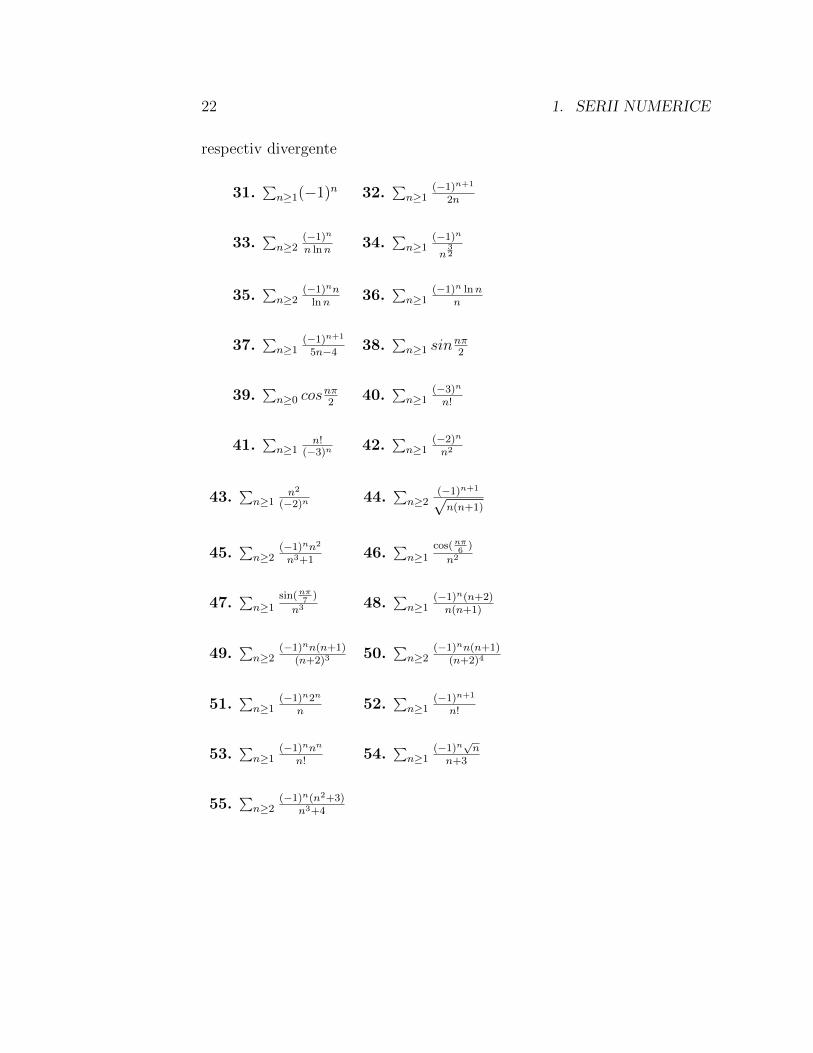
22 1. SERII NUMERICE
respectiv divergente
31.∑n≥1(−1)n 32.
∑n≥1
(−1)n+1
2n
33.∑n≥2
(−1)n
n lnn34.
∑n≥1
(−1)n
n32
35.∑n≥2
(−1)nnlnn
36.∑n≥1
(−1)n lnnn
37.∑n≥1
(−1)n+1
5n−438.
∑n≥1 sin
nπ2
39.∑n≥0 cos
nπ2
40.∑n≥1
(−3)n
n!
41.∑n≥1
n!(−3)n
42.∑n≥1
(−2)n
n2
43.∑n≥1
n2
(−2)n44.
∑n≥2
(−1)n+1√n(n+1)
45.∑n≥2
(−1)nn2
n3+146.
∑n≥1
cos(nπ6
)
n2
47.∑n≥1
sin(nπ7
)
n3 48.∑n≥1
(−1)n(n+2)n(n+1)
49.∑n≥2
(−1)nn(n+1)(n+2)3
50.∑n≥2
(−1)nn(n+1)(n+2)4
51.∑n≥1
(−1)n2n
n52.
∑n≥1
(−1)n+1
n!
53.∑n≥1
(−1)nnn
n!54.
∑n≥1
(−1)n√n
n+3
55.∑n≥2
(−1)n(n2+3)n3+4

2
Serii de puteri
Definitie. Fie a un numar real oarecare si (an)n∈N un sir de numere.
Numim serie de puteri(sau serie Taylor) centrata ın punctul a, cu coeficientii
an, seria∞∑n=0
an(x− a)n,
ın care numarul x ∈ R reprezinta o variabila.
Exemplu. Seriile urmatoare sunt cateva serii de puteri centrate ın 0:
1 + x+ x2 + . . .+ xn + . . .
1− x3
+ x2
5− . . .+ (−1)n xn
2n+1+ . . .
1 + x1!
+ x2
2!+ . . .+ xn
n!+ . . .
Definitie. Seriile de puteri centrate ın punctul 0 se mai numesc si serii
MacLaurin.
Definitie. (i) Spunem ca o serie de puteri converge ın punctul x daca seria∑∞n=0 an(x − a)n este convergenta. In caz contrar spunem ca seria diverge
ın x.
(ii) Spunem ca o serie de puteri converge pe o multime D daca ea converge
ın orice punct x ∈ D.
Exemplu. Vom ıncerca sa determinam punctele x ∈ R ın care converge
seria de puteri∞∑n=0
xn
3n= 1 +
x
3+x2
32+x3
33+ . . .
23

24 2. SERII DE PUTERI
Solutie. Al n-lea termen al seriei este an = xn
3n. Aplicam criteriul raportului
pentru a studia convergenta seriei
∞∑n=0
∣∣∣∣xn3n
∣∣∣∣ .Avem
limn−→∞
|an+1||an|
=∣∣∣∣x3∣∣∣∣ .
Deducem ca pentru x ∈ R cu |x| < 3, seria initiala este absolut convergenta,
iar daca |x| > 3, deoarece limn−→∞ |an| =∞ 6= 0, seria este divergenta. Sa
consideram acum separat cazul cand |x| = 3.
Pentru x = 3, seria initiala de puteri devine
∞∑n=0
xn
3n=∞∑n=0
3n
3n=∞∑n=0
1n,
care este evident divergenta.
Pentru x = −3,
∞∑n=0
xn
3n=∞∑n=0
(−3)n
3n=∞∑n=0
(−1)n,
care diverge de asemenea.
Problema centrala ın studiul seriilor de puteri este determinarea multimii
numerelor reale pentru care seria este convergenta.
Definitie. Multimea
K =
{x ∈ R
∣∣∣∣∣∞∑n=0
an(x− a)n -convergenta
},
se numeste multimea de convergenta a seriei.
Observatie. Oricare ar fi∑∞n=0 an(x − a)n o serie de puteri centrata ın
punctul a, are loc a ∈ K, deoarece pentru x = a, seria de puteri devine
a0 + 0 + 0 + . . .+ 0 + . . .
Prin urmare, K este o multime nevida.
Lema. (i) Daca o serie de puteri∑∞n=0 an(x − a)n converge ıntr-un punct
t ∈ R, atunci ea converge absolut ın orice punct x ∈ R cu |x− a| < |t− a|.

25
(ii) Daca o serie de puteri∑∞n=0 an(x − a)n diverge ıntr-un punct t ∈ R,
atunci ea diverge ın orice punct x ∈ R cu |x− a| > |t− a|.Demonstratie. (i) Din criteriul necesar de convergenta rezulta ca limn−→∞ an(t−a)n = 0. Prin urmare exista n0 ∈ N cu proprietatea ca |an(t − a)n| <1, (∀)n ≥ n0. Pentru n ≥ n0 avem atunci ca
|an(x− a)n| = |an(t− a)n| ·∣∣∣∣∣(x− a)n
(t− a)n
∣∣∣∣∣ = |an(t− a)n| ·∣∣∣∣x− at− a
∣∣∣∣n < ∣∣∣∣x− at− a
∣∣∣∣n .Deoarece seria geometrica
∑∞n=0
∣∣∣x−at−a
∣∣∣n de ratie subunitara este convergenta,
din primul criteriu al comparatiei si inegalitatea de mai sus rezulta ca seria∑∞n=0 an(x− a)n este absolut convergenta.
(ii) Daca seria∑∞n=0 an(x − a)n ar fi convergenta, atunci ar rezulta, con-
form punctului (i), ca seria∑∞n=0 an(t − a)n ar fi absolut convergenta, si
deci convergenta. Acest lucru ar contrazice ınsa ipoteza. Prin urmare, pre-
supunerea ca seria∑∞n=0 an(x − a)n ar fi convergenta nu poate fi corecta,
deci∑∞n=0 an(x− a)n este divergenta.
Teorema I a lui Abel. Pentru orice serie de puteri∑∞n=0 an(x−a)n exista
un numar R, cu 0 ≤ R ≤ ∞, astfel ıncat
a) Seria este absolut convergenta pe intervalul deschis (a−R, a+R).
b) Seria este divergenta pentru orice x cu |x− a| > R.
Demonstratie. Fie
R = sup
{|t− a| ∈ [0,∞)
∣∣∣∣∣∞∑n=0
an(t− a)n - convergenta
}.
Din lema de mai sus rezulta ca numarul R verifica toate afirmatiile din
enuntul teoremei.
Definitie. Numarul R din enuntul teoremei de mai sus se numeste raza de
convergenta a seriei de puteri, iar intervalul deschis I = (a − R, a + R) se
numeste intervalul de convergenta al seriei de puteri.
Observatie. Afirmatia teoremei I a lui Abel se poate sintetiza ın relatia
(∃)R ∈ [0,∞] : (a−R, a+R) ⊆ K ⊆ [a−R, a+R].
Observatie. In cazul cand R ∈ (0,∞), teorema lui Abel nu spune
nimic despre convergenta sau divergenta seriei de puteri ın capetele

26 2. SERII DE PUTERI
a− R si a + R ale intervalului de convergenta. Convergenta seriei
de puteri ın aceste puncte se studiaza separat, folosind diverse
criterii de convergenta(cum ar fi criteriul necesar, criteriile de
comparatie, Raabe-Duhamel, Leibniz,. . . ).
Este utila si urmatoarea
Propozitie. Daca seria de puteri este absolut convergenta ıntr-unul dintre
capetele a − R sau a + R ale intervalului de convergenta, atunci ea este
absolut convergenta si ın celalalt capat.
Demonstratie. Avem ca
|an(a−R− a)n| = |an(−R)n| = |anRn| = |an(a+R− a)n|,
de unde rezulta ca afirmatia propozitiei este triviala.
Raza de convergenta a unei serii de puteri este data de
Teorema lui Cauchy si Hadamard. Fie∑∞n=0 an(x−a)n o serie de puteri
si R raza sa de convergenta. Daca notam
ω = lim n
√|an|, atunci R =
1
ω.
(Folosim aici conventiile uzuale 10
=∞, 1∞ = 0.)
Demonstratie. Fie x ∈ R un numar real oarecare. Atunci
lim n
√|an(x− a)n| = |x− a|lim n
√|an| = |x− a|ω.
(i) Daca |x− a| < 1ω
, atunci
lim n
√|an(x− a)n| < 1,
de unde, conform criteriului radacinii, rezulta ca seria∑∞n=0 an(x− a)n este
absolut convergenta.
(ii) Daca |x− a| < 1ω
, atunci
lim n
√|an(x− a)n| > 1,
de unde rezulta ca termenul general al seriei∑∞n=0 an(x − a)n nu converge
la 0, deci seria este divergenta.
Din cele demonstrate la (i) si (ii) obtinem ca numarul
R =1
ω

27
este raza de convergenta a seriei date.
Exemplu. 1) Pentru seria
1 + x+ x2 + . . .+ xn + . . . =∞∑n=0
xn
avem n
√|an| = 1, (∀)n ≥ 2, deci ω = 1, si atunci R = 1.
2) Pentru
1 +x
1!+x2
2!+ . . .+
xn
n!+ . . . =
∞∑n=0
1
n!xn,
n
√|an| = n
√1n!
, ω = lim n
√1n!
= 0, si R =∞.
Uneori raza de convergenta poate fi gasita pe o cale ceva mai simpla:
Propozitie. Fie∑∞n=0 an(x − a)n o serie de puteri. Daca exista limita
limn−→∞|an+1||an| , atunci
ω = limn−→∞
|an+1||an|
,
deci pentru raza de convergenta R = 1ω
avem ın acest caz
R = limn−→∞
|an||an+1|
.
Exemplu. Determinam multimea de convergenta a seriei de puteri
x
1+x2
2+x3
3+ . . .+
xn
n+ . . .
Coeficientul termenului general al seriei date este an = 1n. Deoarece exista
limn−→∞|an+1||an| = limn−→∞
nn+1
= 1, avem ω = 1, deci R = 1. Intervalul
de convergenta este deci I = (−1, 1) si pentru multimea de convergenta Kavem I ⊆ K ⊆ [−1, 1]. Ramane sa mai studiem convergenta seriei de puteri
ın capetele intervalului de convergenta.
Pentru x = 1, seria de puteri devine seria armonica, care este divergenta.
Deci 1 6∈ K.
Pentru x = −1, seria de puteri devine o serie alternanta, pentru care mod-
ulele termenilor formeaza un sir descrescator, convergent la 0. Conform cri-
teriului lui Leibniz, aceasta este o serie convergenta, deci rezulta ca −1 ∈ K.
Am dedus astfel ca multimea de convergenta a seriei de puteri date este
K = [−1, 1).

28 2. SERII DE PUTERI
2.1 Suma unei serii de puteri
Definitie. Fie∑∞n=0 an(x − a)n o serie de puteri si K multimea sa de
convergenta. Pentru fiecare x ∈ K sa notam
σ(x) =∞∑n=0
an(x− a)n = a0 + a1(x− a) + a2(x− a)2 + . . .+ an(x− a)n + . . .
Am definit astfel o functie σ : K −→ R : x 7−→ σ(x). Functia aceasta se
numeste suma seriei de puteri∑∞n=0 an(x− a)n.
Observatie. Suma unei serii de puteri este o functie definita numai pe
multimea de convergenta a seriei de puteri, desi functiile putere an(x− a)n
care sunt termenii seriei de puteri sunt definite pe ıntreaga multime R a
numerelor reale.
Exemplu. 1) Seria
1 + x+ x2 + . . .+ xn + . . . =∞∑n=0
xn
are multimea de convergenta este K = (−1, 1). Pentru orice x ∈ K, seria
corespunzatoare(care este o seria geometrica) are suma
σ(x) = 1 + x+ x2 + . . .+ xn + . . . =1
1− x.
Functia f : R \ {1} −→ R : x 7−→ 11−x este ınsa diferita de σ, deoarece are
un alt domeniu de definitie.
Functia suma σ asociata unei serii de puteri are urmatoarele proprietati:
Propozitie. Suma σ unei serii de puteri∑∞n=0 an(x − a)n este o functie
continua pe intervalul de convergenta.
Teorema II a lui Abel. Fie∑∞n=0 an(x−a)n o serie de puteri si R raza sa
de convergenta. Daca seria este convergenta ın punctul a−R(sau ın a+R),
atunci suma σ a seriei este continua ın acest punct.
Observatie. Prin urmare, suma unei serii de puteri este o functie continua
pe ıntregul ei domeniu de definitie.

2.2. OPERATII CU SERII DE PUTERI 29
2.2 Operatii cu serii de puteri
Propozitie. Fie∑∞n=0 an(x − a)n si
∑∞n=0 bn(x − a)n doua serii de puteri
centrate ıntr-un acelasi punct a, si fie α un numar real nenul oarecare. Daca
R1 si R2 sunt razele de convergenta ale celor doua serii, atunci:
1) raza de convergenta R a seriei suma∑∞n=0(an + bn)(x− a)n verifica ine-
galitatea
R ≥ inf(R1, R2).
2) raza de convergenta a seriei
α∞∑n=0
an(x− a)n =∞∑n=0
αan(x− a)n
este R1.
3) raza de convergenta R′ a seriei produs∑∞n=0 cn(x−a)n, ai carei coeficienti
sunt dati prin
cn = a0bn + a1bn−1 + . . .+ anb0 =n∑k=0
akbn−k,
verifica inegalitatea
R′ ≥ inf(R1, R2).
Observatie. Multimea seriilor de puteri centrate ıntr-un punct formeaza
un spatiu vectorial ın raport cu operatiile de adunare (1) si ınmultire cu
scalari (2), respectiv un inel ın raport cu operatiile de adunare (1) si ınmultire
(3).
2.3 Derivarea seriilor de puteri
Definitie. Fie∑∞n=0 an(x− a)n o serie de puteri:
a0 + a1(x− a) + a2(x− a)2 + . . .+ an(x− a)n + . . .
Seria care are ca termeni derivatele termenilor acestei serii,
a1 + 2a2(x− a) + 3a3(x− a)2 + . . .+ nan(x− a)n−1 + . . .
este de asemenea o serie de puteri, pe care o vom numi seria derivatelor
seriei∑∞n=0 an(x − a)n. Pentru cele doua serii are loc atunci urmatoarea

30 2. SERII DE PUTERI
proprietate:
Propozitie. Daca∑∞n=0 an(x − a)n este o serie de puteri, avand suma σ,
atunci:
1) Seria derivatelor are aceeasi raza de convergenta.
2) Functia σ este derivabila pe intervalul de convergenta, si derivata sa σ′
coincide pe acest interval cu suma seriei derivatelor.
Corolar. O serie de puteri poate fi derivata ”termen cu termen”.
Exemplu. Seria derivatelor a seriei de puteri
1 + x+ x2 + . . .+ xn + . . .
este
1 + 2x+ 3x2 + . . .+ nxn−1 + . . .
Deoarece pentru suma primei serii de puteri avem
1 + x+ x2 + . . .+ xn + . . . =1
1− x, (∀)x ∈ (−1, 1),
suma seriei derivatelor va fi
1 + 2x+ 3x2 + . . .+ nxn−1 + . . . =1
(1− x)2, (∀)x ∈ (−1, 1).
2.4 Integrarea seriilor de puteri
Propozitie. Daca∑∞n=0 an(x − a)n este o serie de puteri, avand suma σ,
atunci:
1) Seria∑∞n=0
ann+1
(x−a)n+1 este o serie de puteri cu aceeasi raza de convergenta.
2) Suma ξ a seriei∑∞n=0
ann+1
(x− a)n+1 este o primitiva a functiei σ.
Corolar. O serie de puteri poate fi integrata ”termen cu termen”.
Exemplu. Consideram seria de puteri
1− x2 + x4 − x6 + . . .+ (−1)nx2n + . . .
care este convergenta pentru x ∈ (−1, 1). Suma ei este
1− x2 + x4 − x6 + . . .+ (−1)nx2n + . . . =1
1 + x2, (∀)x ∈ (−1, 1).

2.5. PROBLEME PROPUSE 31
Integrand termen cu termen ın ultima relatie, obtinem
arctg(x) = x− x3
3+x5
5− x7
7+ . . .+ (−1)n
x2n+1
2n+ 1+ . . . , (∀)x ∈ (−1, 1).
Deoarece pentru x = 1, seria 1 − 13
+ 15− 1
7+ . . . + (−1)n 1
2n+1+ . . . este
convergenta(conform criteriului lui Leibniz), din teorema a II-a a lui Abel
deducem ca
π
4= arctg(1) = lim
x−→1arctg(x) =
= limx−→1
(x− x3
3+x5
5− x7
7+ . . .+ (−1)n
x2n+1
2n+ 1+ . . .) =
= 1− 1
3+
1
5− 1
7+ . . .+ (−1)n
1
2n+ 1+ . . .
Am obtinut deci identitatea
π
4= 1− 1
3+
1
5− 1
7+ . . .+ (−1)n
1
2n+ 1+ . . . ,
care a fost descoperita de Leibniz. Pentru demonstratia convergentei seriei
din membrul drept, el a folosit pentru prima data criteriul de convergenta
pentru serii alternante care astazi ıi poarta numele.
2.5 Probleme propuse
Determinati intervalele de convergenta si domeniile de convergenta ale urmatoarelor
serii de puteri:
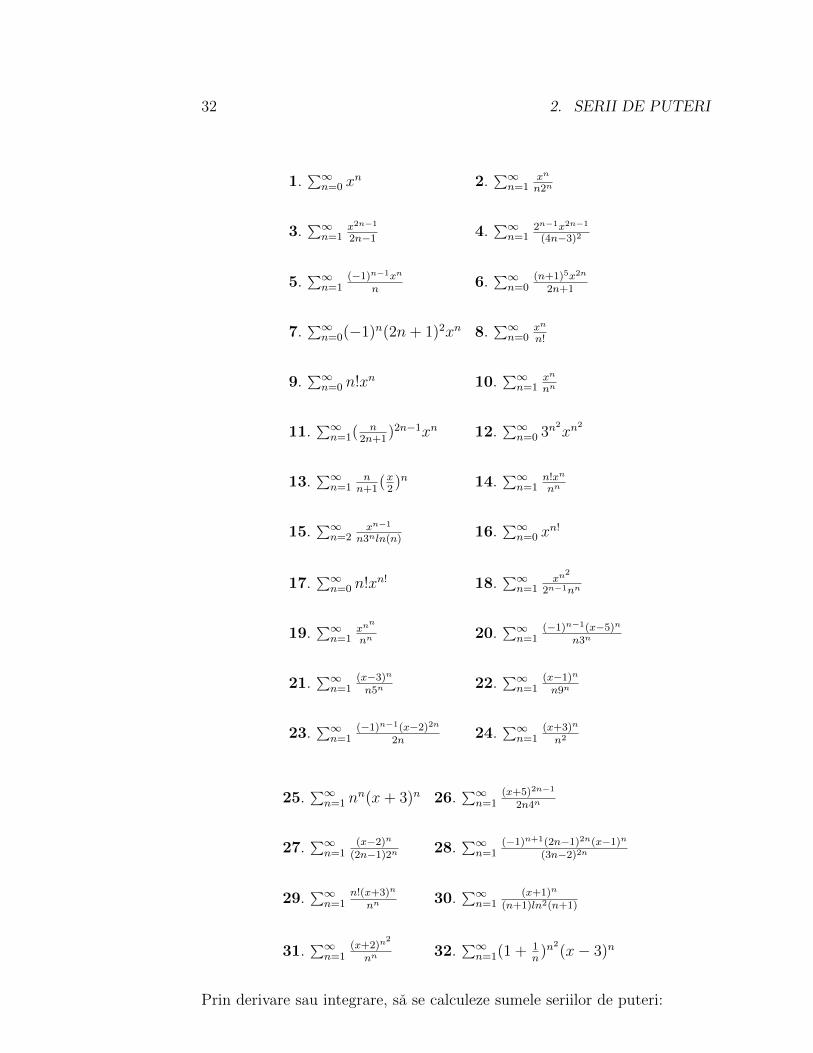
32 2. SERII DE PUTERI
1.∑∞n=0 x
n 2.∑∞n=1
xn
n2n
3.∑∞n=1
x2n−1
2n−14.∑∞n=1
2n−1x2n−1
(4n−3)2
5.∑∞n=1
(−1)n−1xn
n6.∑∞n=0
(n+1)5x2n
2n+1
7.∑∞n=0(−1)n(2n+ 1)2xn 8.
∑∞n=0
xn
n!
9.∑∞n=0 n!xn 10.
∑∞n=1
xn
nn
11.∑∞n=1( n
2n+1)2n−1xn 12.
∑∞n=0 3n
2xn
2
13.∑∞n=1
nn+1
(x2)n 14.
∑∞n=1
n!xn
nn
15.∑∞n=2
xn−1
n3nln(n)16.
∑∞n=0 x
n!
17.∑∞n=0 n!xn! 18.
∑∞n=1
xn2
2n−1nn
19.∑∞n=1
xnn
nn20.
∑∞n=1
(−1)n−1(x−5)n
n3n
21.∑∞n=1
(x−3)n
n5n22.
∑∞n=1
(x−1)n
n9n
23.∑∞n=1
(−1)n−1(x−2)2n
2n24.
∑∞n=1
(x+3)n
n2
25.∑∞n=1 n
n(x+ 3)n 26.∑∞n=1
(x+5)2n−1
2n4n
27.∑∞n=1
(x−2)n
(2n−1)2n28.
∑∞n=1
(−1)n+1(2n−1)2n(x−1)n
(3n−2)2n
29.∑∞n=1
n!(x+3)n
nn30.
∑∞n=1
(x+1)n
(n+1)ln2(n+1)
31.∑∞n=1
(x+2)n2
nn32.
∑∞n=1(1 + 1
n)n
2(x− 3)n
Prin derivare sau integrare, sa se calculeze sumele seriilor de puteri:
2.5. PROBLEME PROPUSE 33
33. x+ x2
2+ x3
3+ . . .+ xn
n+ . . .
34. x− x2
2+ x3
3− . . .+ (−1)n−1 xn
n+ . . .
35. x+ x3
3+ x5
5+ . . .+ x2n−1
2n−1+ . . .
36. x− x3
3+ x5
5− . . .+ (−1)n−1 x2n−1
2n−1+ . . .
37. 1 + 2x+ 3x2 + . . .+ (n+ 1)xn + . . .
38. 1− 3x2 + 5x4 − . . .+ (−1)n−1(2n− 1)x2n−2 + . . .
39. 1 · 2 + 2 · 3x+ 3 · 4x2 + . . .+ n(n+ 1)xn−1 + . . .
Gasiti sumele seriilor:
40. 1x
+ 2x2
+ 3x3
+ . . .+ nxn
+ . . .
41. x+ x5
5+ x9
9+ . . .+ x4n−3
4n−3+ . . .
42. 1− 13·3 + 1
5·32 − . . .+ (−1)n−1 1(2n−1)·3n−1 + . . .
43. 12
+ 322
+ 523
+ . . .+ 2n−12n
+ . . .

34 2. SERII DE PUTERI
3
Formula lui Taylor
Definitie. Fie f : I −→ R o functie, derivabila de n ori ıntr-un punct
a ∈ I. Pentru fiecare x ∈ I putem atunci defini polinomul
Tn(x) = f(a) +f ′(a)
1!(x− a) +
f”(a)
2!(x− a)2 + . . .+
f (n)
n!(a)(x− a)n.
Polinomul Tn(x) se numeste polinomul Taylor de gradul n(sau de ordinul n)
asociat functiei f ın punctul a.
Definitie. Daca pentru fiecare x ∈ I notam
Rn(x) = f(x)− Tn(x),
atunci vom putea scrie
f(x) = f(a) +x− a
1!f ′(a) +
(x− a)2
2!f”(a) + . . .+
(x− a)n
n!f (n)(a) +Rn(x),
oricare ar fi x ∈ I. Aceasta egalitate se numeste formula lui Taylor de
ordinul n corespunzatoare functiei f ın punctul a. Functia Rn se numeste
restul de ordinul n al formulei lui Taylor.
Observatie. Polinomul lui Taylor Tn(x) are proprietatea ca
T (k)n (a) = f (k)(a), (∀)k = 0, n.
Corolar. Restul de ordinul n al formulei lui Taylor este o functie derivabila
de n ori ın punctul a si
R(k)n (a) = 0, (∀)k = 0, n.
35

36 3. FORMULA LUI TAYLOR
Observatie. Pentru restul Rn de ordin n al formulei lui Taylor are loc
proprietatea
limx→a
Rn(x)
(x− a)n= 0.
Propozitie. Daca f este derivabila de n ori ın punctul a ∈ I, atunci exista
o functie α(x) definita pe I astfel ca
limx→a
α(x) = 0 = α(a)
si astfel ca pentru orice x ∈ I sa avem
f(x) = f(a) +x− a
1!f ′(a) +
(x− a)2
2!f”(a) + . . .+
+(x− a)n
n!f (n)(a) +
(x− a)n
n!α(x).
In continuare vom presupune ca f este derivabila de n+ 1 ori pe ıntreg
intervalul I. Pentru restul de ordinul n al formulei lui Taylor vor fi atunci
valabile urmatoarele formule:
1) Pentru orice numar natural p, cu 1 ≤ p ≤ n + 1 exista ξ cuprins ıntre a
si x astfel ca
Rn(x) =(x− a)p(x− ξ)n−p+1
n!pf (n+1)(ξ).
In aceasta forma, Rn se numeste restul lui Schlomlich-Roche pentru formula
lui Taylor.
2) Daca ın formula de mai sus punem p = 1, obtinem restul lui Cauchy
pentru formula lui Taylor:
Rn(x) =(x− a)(x− ξ)n
n!f (n+1)(ξ).
3) Daca ın formula de la 1) luam p = n + 1, obtinem restul lui Lagrange
pentru formula lui Taylor
Rn(x) =(x− a)n+1
(n+ 1)!f (n+1)(ξ).
Observatie. Punctul intermediar ξ depinde de a, x, n si p. Prin urmare,
punctul ξ nu este neaparat acelasi pentru cele trei formule de mai sus.
Observatie. Deoarece ξ este cuprins ıntre a si x, exista un numar θ(care
depinde de asemenea de a, x, n si p) astfel ıncat 0 < θ < 1 si
ξ = a+ θ(x− a).

37
Daca notam h = x− a, atunci ξ = a+ θh, si formula lui Taylor se va scrie
f(a+ h) = f(a) +h
1f ′(a) +
h2
2f”(a) + . . .+
hn
n!f (n)(a) +Rn,
unde restul Rn poate avea una din formele:
Rn = hn+1(1−θ)n−p+1
n!pf (n+1)(a+ θh) (Schlomlich-Roche);
Rn = hn+1(1−θ)nn!
f (n+1)(a+ θh) (Cauchy);
Rn = hn+1
(n+1)!f (n+1)(a+ θh) (Lagrange).
Exercitiu. Scrieti formula lui Taylor cu restul lui Lagrange ın punctul 0
pentru urmatoarele functii:
1) f : R −→ R, f(x) = ex.
2) f : R −→ R, f(x) = sin(x).
3) f : R −→ R, f(x) = cos(x).
4) f : (−1,∞) −→ R, f(x) = ln(1 + x).
Definitie. Fie f : I −→ R o functie indefinit derivabila ıntr-un punct
a ∈ I. Atunci putem considera seria urmatoare:
f(a) +x− a
1!f ′(a) +
(x− a)2
2!f”(a) + . . .+
(x− a)n
n!f (n)(a) + . . .
Aceasta serie de puteri se numeste seria Taylor a functiei f ın punctul
a. Ea are o raza de convergenta 0 ≤ R ≤ ∞, o multime de convergenta
nevida K care contine cel putin punctul a, si un interval de convergenta
(a− R, a + R) ⊆ K. Pe multimea K este definita functia suma T a acestei
serii de puteri.
Sumele partiale ale seriei Taylor a functiei f ın punctul a sunt evident
polinoamele Taylor asociate functiei f ın punctul a. Deoarece pentru nu-
mere x aflate ”aproape” de numarul a, polinoamele Tn(x) aproximeaza din
ce ın ce mai bine functia f(x), se pune ıntrebarea daca vom putea scrie
f(x) = T (x), (∀)x ∈ I ∩ K.
Raspunsul la aceasta ıntrebare este dat de urmatoarea
Teorema. Seria Taylor a functiei f ın punctul a este convergenta ıntr-un
punct x ∈ I∩K catre valoarea f(x) a functiei f ın x daca si numai daca val-
orile ın x ale resturilor Rn ale formulelor lui Taylor formeaza un sir (Rn(x))
convergent catre 0.

38 3. FORMULA LUI TAYLOR
3.1 Serii Taylor pentru functii de doua vari-
abile
Dezvoltarea ın serie Taylor a unei functii f(x, y) ın jurul unui punct (a, b)
are forma
f(x, y) = f(a, b) +1
1![(x− a)
∂
∂x+ (y − b) ∂
∂y]f(a, b)+
+1
2![(x−a)
∂
∂x+(y−b) ∂
∂y]2f(a, b)+. . .+
1
n![(x−a)
∂
∂x+(y−b) ∂
∂y]nf(a, b)+. . . ,
unde
[(x− a)∂
∂x+ (y − b) ∂
∂y]f(a, b) =
∂f
∂x(a, b)(x− a) +
∂f
∂y(a, b)(y − b),
[(x− a)∂
∂x+ (y − b) ∂
∂y]2f(a, b) =
∂2f
∂x2(a, b)(x− a)2+
+2∂2f
∂x∂y(a, b)(x− a)(y − b) +
∂2f
∂y2(a, b)(y − b)2,
s.a.m.d.
3.2 Probleme propuse
1. Aratati ca
i) ex = 1 + x1!
+ x2
2!+ . . .+ xn
n!+ . . . , (∀)x ∈ R
ii) sin(x) = x− x3
3!+ x5
5!− . . .+ (−1)n−1 x2n−1
(2n−1)!+ . . . , (∀)x ∈ R
iii) cos(x) = 1− x2
2!+ x4
4!− . . .+ (−1)n x2n
(2n)!+ . . . , (∀)x ∈ R
iv) ln(1 + x) = x− x2
2+ x3
3− . . .+ (−1)n−1 xn
n+ . . . , (∀)x ∈ (−1, 1]
v) ln(1− x) = −x− x2
2− x3
3− . . .− xn
n− . . . , (∀)x ∈ [−1, 1)
vi) (1 + x)m = 1 + m1!x + m(m−1)
2!x2 + . . . + m(m−1)...(m−n+1)
n!xn + . . . , (∀)x ∈
(−1, 1)
2. Determinati dezvoltarile ın serie MacLaurin ale urmatoarelor functii,
indicand si intervalele ın care este valabila fiecare dezvoltare:

3.2. PROBLEME PROPUSE 39
i) f(x) = ax; ii) f(x) = sin(x+ π4);
iii) f(x) = cos(x+ a); iv) f(x) = sin2(x);
v) f(x) = ln(2 + x); vi) f(x) = 2x−3(x−1)2
;
vii) f(x) = 3x−5x2−4x+3
; viii) f(x) = cos2(x);
ix) f(x) = x1+x2
; x) f(x) = 1√4−x2 ;
xi) f(x) = ch(x); xii) f(x) = sh(x);
xiii) f(x) = ln(1+x1−x); xiv) f(x) = (1 + x) ln(1 + x);
xv) f(x) = ln(x+√
1 + x2); xvi) f(x) = arctg(x);
xvii) f(x) = arcsin(x); xviii) f(x) = ln(1 + x− 2x2));
xix) f(x) = (1 + x)e−x; xx) f(x) = 3√
8 + x.
3. Scrieti primii trei termeni nenuli ai dezvoltarilor ın serie MacLaurin ale
urmatoarelor functii:
i)f(x) = tg(x); ii)f(x) = th(x); iii)f(x) = ln(cos(x));
iv)f(x) = ecos(x); v)f(x) = esin(x).
4. Dezvoltati functia f(x) = x3−2x2−5x−2 ın serie de puteri ale lui x+4.
5. Dezvoltati functia f(x) = ln(x) ın serie de puteri ale lui x− 1.
6. Dezvoltati functia f(x) = 1x
ın serie de puteri ale lui x− 1.
7. Dezvoltati functia f(x) = 1x2
ın serie de puteri ale lui x+ 1.
8. Dezvoltati functia f(x) = 1x2+3x+2
ın serie de puteri ale lui x+ 4.
9. Dezvoltati functia f(x) =√x ın serie de puteri ale lui x+ 2.
10. Dezvoltati functia f(x) = cos(x) ın serie de puteri ale lui x− π2.
11. Dezvoltati functia f(x) = ln(x) ın serie de puteri ale lui 1−x1+x
.
12. Dezvoltati functia f(x) = x√1+x
ın serie de puteri ale lui x1+x
.
13. Folosind dezvoltarea functiei arctg(x), aflati numarul π cu o zecimala
exacta.

40 3. FORMULA LUI TAYLOR
14. Folosind dezvoltarea functiei ex, aflati numarul e cu trei zecimale exacte.
15. Dezvoltati ın serie de puteri ale lui x si y urmatoarele functii:
i) f(x, y) = sin(x) sin(y), ii) f(x, y) = ln(1− x− y + xy),
iii) f(x, y) = sin(x2 + y2), iv) f(x, y) = arctg( x+y1−xy )
v) f(x, y) = 1−x+y1+x−y .
16. Fie f(x, y) = ax2 + 2bxy + cy2. Dezvoltati f(x + h, y + k) ın serie de
puteri ale lui h si k.
17. Dezvoltati ex+y ın serie de puteri ale lui x− 2 si y + 2.
18. Dezvoltati sin(x+ y) ın serie de puteri ale lui x si y − π2.
19. Scrieti formula lui Taylor de ordinul doi ın punctul (0, 0) pentru
urmatoarele functii:
i) f(x, y) = ex cos(y), ii) f(x, y) = (1 + x)1+y.

4
Notiuni de topologie ın Rn
Spatiul vectorial Rn are o structura de spatiu euclidian definita de produsul
scalar si de norma asociata. Cu ajutorul normei se poate defini pe Rn o
distanta:
d : Rn ×Rn −→ R, d(X, Y ) = ||X − Y ||, (∀)X, Y ∈ Rn.
Proprietatile functiei distanta sunt:
1) d(X, Y ) ≥ 0, (∀)X, Y ∈ Rn.
2) d(X, Y ) = 0⇐⇒ X = Y .
3) d(X, Y ) = d(Y,X), (∀)X, Y ∈ Rn.
4) d(X, Y ) ≤ d(X,Z) + d(Z, Y ), (∀)X, Y, Z ∈ Rn.
O functie cu proprietatile functiei distanta de mai sus se mai numeste si
metrica, si spunem ca (Rn, d) este un spatiu metric.
Definitie. Fie X ∈ Rn si r ∈ R+.
• Bila deschisa de centru X si raza r este multimea
B(X, r) = {Y ∈ Rn|d(X, Y ) < r}.
• Bila ınchisa de centru X si raza r este multimea
B(X, r) = {Y ∈ Rn|d(X, Y ) ≤ r}.
• Sfera de centru X si raza r este multimea
S(X, r) = {Y ∈ Rn|d(X, Y ) = r}.
41
42 4. NOTIUNI DE TOPOLOGIE IN RN
Definitie. Fie X ∈ Rn si V ⊆ Rn. V se numeste vecinatate a lui X
daca exista r > 0 cu proprietatea ca B(X, r) ⊆ V . Multimea vecinatatilor
punctului X o vom nota cu V(X), iar daca V este o vecinatate a lui X,
vom scrie V ∈ V(X).
Definitie. O multime D ∈ Rn se numeste multime deschisa daca este
vecinatate pentru orice punct al sau, i.e.
(∀)X ∈ D (∃)r > 0 : B(X, r) ⊆ D.
Vom nota cu D multimea multimilor deschise incluse ın Rn.
• Complementarele multimilor deschise se numesc multimi ınchise.
• O multime compacta este o multime ınchisa si marginita.
Propozitie. Multimile deschise incluse ın Rn au urmatoarele proprietati:
1) Rn, ∅ ∈ D.
2) Daca D1, D2 ∈ D, atunci D1 ∩D2 ∈ D.
3) Daca (Di)i∈I ∈ D este o familie oarecare de multimi deschise, atunci
∪i∈IDi ∈ D.
Definitie. O familie T de submultimi ale lui Rn care satisface conditiile
din propozitia de mai sus, se numeste topologie pe Rn.
Observatie. Multimea D a multimilor deschise din Rn formeaza deci o
topologie pe Rn.
Definitie. Perechea (Rn,D) fomeaza un spatiu topologic.
Definitie. Fie M ⊆ Rn o submultime oarecare a spatiului topologic
(Rn,D).
• Interiorul lui M(notat Int(M)) este cea mai mare multime deschisa
continuta ın M . Avem
Int(M) = {X ∈ Rn|M ∈ V(X)}.
• Exteriorul lui M(notat Ext(M)) este interiorul multimii complementare
lui M ın Rn:
Ext(M) = {X ∈ Rn|(∃)r > 0 : B(X, r) ∩M = ∅}.

43
• Inchiderea(sau aderenta lui M)(notata M) este cea mai mica multime
ınchisa care contine M si este complementara exteriorului multimii M :
M = {X ∈ Rn|(∀)r > 0 =⇒ B(X, r) ∩M 6= ∅} =
= {X ∈ Rn|(∀)V ∈ V(X) =⇒ B(X, r) ∩M 6= ∅}.
• Multimea punctelor de acumulare a lui M(notata M ′) este
M ′ = {X ∈ Rn|(∀)V ∈ V(X) =⇒ B(X, r) ∩M \ {X} 6= ∅}.
• Frontiera lui M(notata Fr(M)) consta din punctele aderente atat lui M ,
cat si complementarei lui M :
Fr(M) = {X ∈ Rn|(∀)V ∈ V(X) =⇒ B(X, r) ∩M 6= ∅ 6= B(X, r) \M}.
• Multimea punctelor izolate ale multimii M(notata Iz(M)) consta din
punctele aderente ale lui M care nu sunt puncte de acumulare:
Iz(M) = M \M ′.

44 4. NOTIUNI DE TOPOLOGIE IN RN
5
Functii de mai multe variabile
5.1 Definitii. Exemple
Definitie. Fie D ⊆ Rn o submultime a spatiului Rn. O functie f : D −→R se numeste functie(scalara) de n variabile. Multimea D este domeniul de
definitie al lui f , notat Dom(f), iar multimea {f(X)|X ∈ D} se numeste
imaginea functiei f , si o notam Im(f).
Observatie. Uneori nu se indica domeniul de definitie al unei functii, ci
doar spatiul Rn ın care este inclus acesta. In acest caz se considera de
regula ca domeniul de definitie este domeniul maxim de definitie, pentru
care au sens toate calculele care se fac pentru determinarea imaginii unui
vector prin functia a carei lege de corespondenta este indicata.
Exemplu. 1) Pentru functia f : R4 −→ R, definita prin
f(x1, x2, x3, x4) = x21 + x2
2 + x23 + x2
4,
domeniul de definitie este R4, iar imaginea este R+.
2) Fie f : D ⊆ R4 −→ R, data de legea de corespondenta
f(x1, x2, x3, x4) =1
x21 + x2
2 + x23 + x2
4 − 1.
Domeniul de definitie nu este indicat, astfel ca trebuie considerat ca fiind
domeniul maxim de definitie al expresiei care defineste legea de corespondenta
prin care este definita functia. Astfel,
Dom(f) = {X ∈ R4|x21 + x2
2 + x23 + x2
4 − 1 6= 0} =
45

46 5. FUNCTII DE MAI MULTE VARIABILE
= {X ∈ R4|d(X, 0) 6= 1} = R4 \ S(0, 1).
Imaginea functiei f este R \ (−1, 0].
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile. Graficul functiei
f este multimea
Gf = {(X, xn+1) ∈ Rn+1|X ∈ D, xn+1 = f(X)}.
Exemplu. Graficul functiei f : B(0, 1) ⊆ R2 −→ R, definita prin f(X) =√1− ||X||2 este semisfera ”superioara” S+(0, 1) ⊆ R3.
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile si α ∈ R.
Linia de nivel α a lui f este multimea Lα(f) = {(x1, x2, . . . , xn) = X ∈D, f(X) = α}. Ea se mai numeste preimaginea(sau imaginea inversa) a lui
α si se mai noteaza si f−1(α).
5.2 Probleme propuse
Determinati domeniile si imaginile functiilor urmatoare
1. f(x, y) =√x2 + y2; 2. f(x, y) =
√1 + x+ y;
3. f(x, y) =xy ; 4. f(x, y) =
√1− x2 − 4y2;
5. f(x, y) =√
1− x2 + 4y2; 6. f(x, y) = sin(x+ y);
7. f(x, y) = ex + ey; 8. f(x, y) = 1(x2−y2)3/2 ;
9. f(x, y) = tan(x− y); 10. f(x, y) =√
x+yx−y ;
11. f(x, y) =√
x−yx+y ; 12. f(x, y) = sin−1(x+ y);
5.2. PROBLEME PROPUSE 47
13. f(x, y) = cos−1(x− y); 14. f(x, y) =y|x| ;
15. f(x, y) =x2−y2x+y ; 16. f(x, y) = ln(1 + x2 − y2);
17. f(x, y) = x2y + 2y
x ; 18. f(x, y, z) = x+ y + z;
19. f(x, y, z) =√x+ y + z; 20. f(x, y, z) = 1√
x2+y2+z2;
21. f(x, y, z) = 1√x2−y2+z2
; 22. f(x, y, z) =√−x2 − y2 − z2;
23. f(x, y, z) = ln(x− 2y − 3z + 4); 24. f(x, y, z) =xyz ;

48 5. FUNCTII DE MAI MULTE VARIABILE
6
Limite. Continuitate
6.1 Limita unei functii ıntr-un punct
Fie f : D ⊆ Rn −→ R o functie de n variabile, A = (a1, a2, . . . , an) ∈ D′
un punct de acumulare al domeniului de definitie al functiei f si l ∈ R.
Definitie. Spunem ca functia f are limita l ın punctul A daca pentru
orice vecinatate U a lui l exista o vecinatate V a lui A cu proprietatea ca
f(X) ∈ U, (∀)X ∈ V ∩D \ {A}.
O forma echivalenta a definitiei de mai sus este:
Definitie. Functia f are limita l ın punctul A daca pentru orice vecinatate
U a lui l exista δ > 0 astfel ıncat f(X) ∈ U, (∀)X ∈ D, 0 < d(X,A) < δ.
Daca l ∈ R este un numar finit, putem transcrie definitiile de mai sus
ın forma urmatoare:
Definitie. Functia f are limita l ın punctul A daca pentru orice ε > 0
exista δ > 0 astfel ıncat
|f(X)− l| < ε, (∀)X ∈ D, 0 < d(X,A) < δ.
Observatie. Aceasta ultima varianta a definitiei poarta si numele de ”cri-
teriul ε− δ”.
In cazul cand l =∞, putem formula definitia ın modul urmator:
Definitie. Functia f are limita ∞ ın punctul A daca pentru orice M ∈ R
exista δ > 0 astfel ıncat
f(X) > M, (∀)X ∈ D, 0 < d(X,A) < δ.
49

50 6. LIMITE. CONTINUITATE
Asemanator, pentru l = −∞ avem
Definitie. Functia f are limita −∞ ın punctul A daca pentru orice m ∈ R
exista δ > 0 astfel ıncat
f(X) < m, (∀)X ∈ D, 0 < d(X,A) < δ.
Exemplu. Vom arata ca
limX−→(−4,1,0,3)
(x1 + 2x2 − x3 + 3x4) = 7.
Solutie. Fie ε > 0 dat. Vom cauta sa determinam δ > 0 cu proprietatea
ca
|x1 + 2x2 − x3 + 3x4 − 7| < ε
daca
0 <√
(x1 + 4)2 + (x2 − 1)2 + x23 + (x4 − 3)2 < δ
Pentru aceasta, sa observam ca putem folosi inegalitatea modulului si scrie:
|x1 + 2x2 − x3 + 3x4 − 7| = |x1 + 4 + 2x2 − 2− x3 + 3x4 − 9| ≤
≤ |x1+4|+|2x2−2|+|x3|+|3x4−9| = |x1+4|+2|x2−1|+|x3−0|+3|x4−3|.
Fiecare dintre numerele |x1 + 4|, |x2− 1|, |x3− 0|, |x4− 3| mai mic sau egal
cu √(x1 + 4)2 + (x2 − 1)2 + x2
3 + (x4 − 3)2.
Prin urmare, rezulta ca
|x1 + 2x2 − x3 + 3x4 − 7| ≤ 7√
(x1 + 4)2 + (x2 − 1)2 + x23 + (x4 − 3)2 =
= 7 · d((x1, x2, x3, x4), (−4, 1, 0, 3)).
Fie acum δ = 17ε. Daca d(X, (−4, 1, 0, 3)) < δ, atunci conform inegalitatii
de mai sus are loc:
|f(X)− 7| = |x1 + 2x2 − x3 + 3x4 − 7| ≤ 7δ = 7ε
7= ε
si deci
limX−→(−4,1,0,3)
(x1 + 2x2 − x3 + 3x4) = 7.
Exemplu. Vom arata ca pentru functia
f : R5 \ {0} −→ R, f(x1, x2, x3, x4, x5) =x2
1 − x22 + x2
3 − x24 + x2
5
x21 + x2
2 + x23 + x2
4 + x25

6.2. CONTINUITATE 51
nu exista limX−→0 f(X).
Solutie. Vom arata acest lucru demonstrand ca putem obtine doua valori
diferite apropiindu-ne de 0 pe doua cai diferite. Fie X −→ 0 cu x1 = x2 =
x3 = x4 = 0 si x5 −→ 0, adica ne apropiem de 0 de-a lungul axei Ox5.
Atunci avem
f(X) =x2
5
x25
= 1,
astfel ca
lim(0,0,0,0,x5)−→0
f(X) = 1.
Fie acum X −→ 0 cu x1 = x2 = x3 = x5 = 0 si x4 −→ 0. Atunci
f(X) =−x2
4
x24
= −1,
astfel ca
lim(0,0,0,x4,0)−→0
f(X) = −1.
Deoarece am obtinut doua rezultate diferite, deducem ca limita nu poate
exista.
Observatie. Retineti deci ca limita unei functii ıntr-un punct, daca exista,
este unica. Sau, cu alte cuvinte, daca apropiindu-ne de punctul a ın mai
multe moduri obtinem limite diferite, atunci functia nu are limita ın punctul
A.
6.2 Continuitate
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile reale si A ∈ D.
Spunem ca functia f este continua ın punctul A daca pentru orice vecinatate
U a lui f(A) exista o vecinatate V a punctului A astfel ıncat f(X) ∈ U ,
pentru orice X ∈ V ∩D.
Observatie. Daca A este un punct izolat al multimii D, atunci exista
o vecinatate V a sa, astfel ıncat V ∩ D = {A}. Dar atunci, pentru orice
vecinatate U a lui f(A) are loc f(X) ∈ U , pentru orice X ∈ V ∩D(deoarece
A este singurul element din V ∩D si f(A) se afla ın orice vecinatate a sa).
Inseamna ca orice functie este continua ın orice punct izolat al domeniului
sau de definitie.
Observatie. Daca A ∈ D este ınsa un punct de acumulare al lui D, atunci

52 6. LIMITE. CONTINUITATE
functia f este continua ın A daca si numai daca f are limita ın punctul A
si aceasta limita este egala cu f(A).
Exemplu. Functia f : R5 −→ R definita prin f(0) = 0 si
f(x1, x2, x3, x4, x5) =x2
1 − x22 + x2
3 − x24 + x2
5
x21 + x2
2 + x23 + x2
4 + x25
, (∀)X 6= 0
nu are limita ın 0, prin urmare nu este continua ın 0.
Continuitatea ıntr-un punct poate fi studiata si ea cu ajutorul unui ”cri-
teriu ε−δ”, deoarece definitia continuitatiiıntr-un punct este echivalenta cu
urmatoarea:
Definitie. Functia f : D ⊆ Rn −→ R este continua ıntr-un punct A ∈ Ddaca pentru orice ε > 0 exista δ > 0 astfel ıncat
|f(X)− f(A)| < ε, (∀)X ∈ D, d(X,A) < δ.
Definitie. (i) Un polinom p(X) = p(x1, x2, . . . , xn) ın variabilele x1, x2,
. . . , xn este o suma finita de termeni(numiti monoame) de forma
αxm11 xm2
2 . . . xmnn ,
unde m1,m2, . . . ,mn ∈ N, iar α ∈ R. Gradul unui monom este suma
m = m1 +m2 + . . .+mn, iar gradul unui polinom este cel mai mare dintre
gradele monoamele sale.
(ii) O functie rationala r(X) = r(x1, x2, . . . , xn) ın variabilele x1, x2, . . . , xn
este o functie care poate fi scrisa ca raportul dintre doua polinoame:
r(X) =p(X)
q(X).
Propozitie. (i) Orice polinom ın n variabile este continuu ın orice punct
din Rn.
(ii) Orice functie rationala r = p/q este continua ın orice punct A ∈ Rn cu
proprietatea ca q(A) 6= 0.
(iii) Daca f si g sunt doua functii continue ıntr-un punct A atunci f + g si
fg sunt cotinue ın A.
(iv) Daca f si g sunt continue ın A si g(A) 6= 0, atunci f/g este continua ın
A.

6.3. PROBLEME PROPUSE 53
(v) Daca f este continua ın A, iar h est eo functie de o variabila, care este
continua ın punctul f(A), atunci functia compusa h ◦ f este continua ın A.
Exemplu. p(X) = x31x
52x
85 − 3x1x
42x
24 + 5x2
1x32x
43x
24x5 este continua ın orice
punxt A din R5.
Exemplu.
r(X) =x2
1x5x44 + x1x
22x
33x
55 − x6
1x2x35
x1 − 2x2 + 3x3 − 4x4 + 2x5 − 6
este continua ın orice X ∈ R5, cu exceptia acelor X care satisfac egalitatea
x1 − 2x2 + 3x3 − 4x4 + 2x5 = 6.
Observatie. O multime de vectori care verifica o egalitate ca cea de mai
sus se numeste hiperplan. In general, un hiperplan ın Rn este o multime de
forma
H = {X ∈ Rn | a1x1 + a2x2 + . . .+ anxn = b}
unde a1, a2, . . . , an, b sunt numere reale.
Exemplu. Functia sin(x21+2x1x4−x4
3x55) este continua ın orice a din R5, fi-
ind o compusa a functiei continue de o variabila sin si a unei funtii continue.
6.3 Probleme propuse
Verificati cu ajutorul definitiei valorile limitelor
1. lim(x,y)−→(1,2)
(3x+ y) = 5 2. lim(x,y)−→(3,−1)
(x− 7y) = 10
3. lim(x,y)−→(5,−2)
(ax+ by) = 5a− 2b 4. lim(x,y)−→(0,0)
2x2yx2+y2
= 0
5. lim(x,y)−→(4,1)
(x2 + 3y2) = 19 6. lim(x,y)−→(1,1)
xy
= 1
Aratati ca urmatoarele limite nu exista
54 6. LIMITE. CONTINUITATE
7. lim(x,y)−→(0,0)
x+yx−y 8. lim
(x,y)−→(0,0)
xyx2−y2
9. lim(x,y)−→(0,0)
ax2+bycx2+dy
, a, b, c, d > 0 10. lim(x,y,z)−→(0,0,0)
xy+2xy+3yzx2+y2+z2
11. lim(x,y)−→(0,0,0)
xyzx3+y3+z3
Calculati limitele urmatoare
12. lim(x,y)−→(0,0)
3xy√x2+y2
13. lim(x,y)−→(0,0)
x3+y3
x2+y2
14. lim(x,y)−→(−4,3)
1+xy1−xy 15. lim
(x,y)−→(1,2)ln(1 + ex+y)
16. lim(x,y)−→(1,1)
x−yx2−y2 17. lim
(x,y)−→(2,5)sh(x+1y−2
)
18. lim(x,y)−→(0,0,0)
yx2+z3
x2+y2+z219. lim
(x,y)−→(4,1,3)ln(x− yz + 4x3y5z)
Studiati continuitatea functiilor urmatoare ın origine.
20. f(x, y) =
3xy√x2+y2
(x, y) 6= (0, 0)
c (x, y) = (0, 0)
21. f(x, y) =
xy|x|+|y| (x, y) 6= (0, 0)
c (x, y) = (0, 0)
22. f(x, y, z) =
yz−x2
x2+y2+z2(x, y, z) 6= (0, 0, 0)
c (x, y, z) = (0, 0, 0)
7
Derivate partiale
7.1 Derivate partiale de ordinul ıntai
Definitie. Fie f : D ⊆ Rn −→ Rn o functie de n variabile, definita pe
o multime deschisa D din Rn si fie A ∈ D un punct fixat al domenilui de
definitie. Spunem ca functia f este derivabila partial ın raport cu variabila
xi ın punctul A daca exista si este finita limita
lim∆xi−→0
f(a1, . . . , ai−1, ai + ∆xi, ai+1, . . . , an)− f(a1, . . . , ai−1, ai, ai+1, . . . , an)
∆xi.
Atunci cand exista, limita de mai sus se noteaza cu∂f∂xi
(A).
Definitie. Fie f : D ⊆ Rn −→ Rn o functie de n variabile si Di o multime
inclusa ın domeniul D de definitie al functiei. Spunem ca f este derivabila
partial ın raport cu variabila xi pe Di daca f este derivabila partial ın raport
cu xi ın orice punct A ∈ Di.
Definitie. Derivata partiala a unei functii f : D ⊆ Rn −→ Rn ın raport
cu variabila xi este functia (∂f/∂xi) : Di −→ R definita de limita de mai
sus pe multimea punctelor pe care f este derivabila partial ın raport cu
variabila xi.
Observatie. Din definitia derivatei partiale ın raport cu o variabila se poate
constata ca ea se calculeaza fixand toate celelalte variabile constante(egale
cu componentele corespunzatoare ale punctului ın care se face calculul),
apoi derivand dupa variabila respectiva. In consecinta, atunci cand cal-
culam derivate partiale putem folosi regulile de derivare pentru functii de o
55

56 7. DERIVATE PARTIALE
variabila.
Observatie. Atentie! Chiar daca pentru calculul unei derivate partiale de-
rivam practic ın raport cu o singura variabila, fixand celelalte variabile, o
derivata partiala este o functie de n variabile.
Exemplu. Derivatele partiale ale functiei f(X) = x21 − x2
2 + 3x1x2x3 − x4x1
sunt:∂f∂x1
= 2x1 + 3x2x3 + x4x21
∂f∂x3
= 3x1x2
∂f∂x2
= −2x2 + 3x1x3 ∂f
∂x4= − 1
x1
Notatie. Frecvent vom folosi ın loc de ∂f∂xi
notatia fxi , sau pentru simpli-
tate fi; astfel derivatele partiale din exemplul de mai sus se scriu fx1 = f1 =
2x1 + 3x2x3 + x4x21
, fx2 = f2 = −2x2 + 3x1x3, s.a.m.d.
Observatie. Spre deosebire de cazul functiilor de o singura variabila, o
functie care este derivabila partial ın raport cu toate variabilele nu este ın
mod necesar continua ın acel punct.
Exemplu. Fie f : R2 −→ R, definita prin
f(x, y) =
xy
x2+y2(x, y) 6= (0, 0)
0 (x, y) = (0, 0).
Aratati ca fx si fy exista ın punctul (0, 0), dar ca f nu este continua ın
origine.
Solutie. Vom arata ın primul rand ca nu exista lim(x,y)−→(0,0) f(x, y), deci f
nu poate fi continua ın origine. In acest scop, vom considera ıntai (x, y) −→(0, 0) cu y = x. Pentru acest caz avem atunci:
xy
x2 + y2=
x2
x2 + x2=
1
2,
astfel ca daca ar exista lim(x,y)−→(0,0) f(x, y), aceasta ar fi egala cu 12. Sa
consideram acum (x, y) −→ (0, 0) cu y = −x. Atunci
xy
x2 + y2=−x2
x2 + x2= −1
2,
de unde ar rezulta ca lim(x,y)−→(0,0) f(x, y) ar fi egala cu −12. Prin urmare
limita nu poate exista si deci functia f nu este continua ın origine. Pe de

7.2. DERIVATE PARTIALE DE ORDIN SUPERIOR 57
alta parte avem
fx(0, 0) = lim∆x−→0
f(0 + ∆x, 0)− f(0, 0)
∆x= lim
∆x−→0
(0+∆x)·0(0+∆x)2+02
− 0
∆x=
= lim∆x−→0
0
∆x= lim
∆x−→00 = 0.
Analog, obtinem ca fy = 0. Astfel ın punctul (0, 0) exista ambele derivate
partiale fx si fy, chiar daca functia f nu este continua ın acest punct.
7.2 Derivate partiale de ordin superior
Pentru functii de o variabila, y = f(x) derivatele de ordinul I si al II-lea
sunt date de
y′ =df
dxsi y” =
d2f
dx2=
d
dx
(df
dx
).
Cu alte cuvinte, derivata de ordinul al doilea este derivata derivatei de
ordinul ıntai.
Asemanator, pentru o functie de doua variabile z = f(x, y), putem
deriva fiecare din ”primele” derivate ∂f/∂x si ∂f/∂y ın raport cu fiecare
din variabilele x si y, obtinand astfel patru derivate partiale de ordinul doi:
Definitie. Fie f : D ⊆ R2 −→ R o functie de doua variabile, z = f(x, y),
derivabila partial ın raport cu ambele variabile pe D, astfel ıncat fiecare
derivata partiala este de asemenea derivabila partial. Se pot obtine atunci
derivatele partiale de ordinul doi ale functiei f ın urmatoarele moduri:
(i) Derivand de doua ori ın raport cu x:
∂2z
∂x2=∂2f
∂x2= fxx =
∂
∂x
(∂f
∂x
).
(ii) Derivand ıntai ın raport cu x si apoi ın raport cu y:
∂2z
∂y∂x=
∂2f
∂y∂x= fxy =
∂
∂y
(∂f
∂x
).
(iii) Derivand ıntai ın raport cu y si apoi ın raport cu x:
∂2z
∂x∂y=
∂2f
∂x∂y= fyx =
∂
∂x
(∂f
∂y
).

58 7. DERIVATE PARTIALE
(i) Derivand de doua ori ın raport cu y:
∂2z
∂y2=∂2f
∂y2= fyy =
∂
∂y
(∂f
∂y
).
Observatie. Derivatele partiale ∂2f/∂x∂y si ∂2f/∂y∂x se numesc derivate
partiale mixte de ordinul doi.
Observatie. In notatia ”fractionara”, a calcula ∂2f/∂x∂y ınseamna a
deriva ıntai ın raport cu variabila y, si apoi ın raport cu x, adica de-
rivam ın ordinea inversa aparitiei variabilelor la numitorul ”raportului de
derivare”(asemanator cu situatia ıntalnita la compunerea functiilor), spre
deosebire de notatia ”indiciala” fyx, ın care ordinea scrierii variabilelor core-
spunde ordinii ın care efectuam derivarile partiale.
Exemplu. Fie z = f(x, y) = x3y2 − xy5. Vom calcula derivatele partiale
de ordinul doi ale lui f .
Solutie. Avem fx = 3x2y2− y5 si fy = 2x3y− 5xy4. Derivatele partiale de
ordinul al doilea sunt:
fxx = ∂∂x
(fx) = 6xy2 fxy = ∂∂y
(fx) = 6x2y − 5y4
fyx = ∂∂x
(fy) = 6x2y − 5y4 fyy = ∂∂y
(fy) = 2x3 − 20xy3.
Asemanator putem defini derivate de ordinul doi si ın cazul unei functii
de n variabile:
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile, derivabila partial
pe D ın raport cu fiecare variabila, astfel ıncat fiecare derivata partiala este
la randul ei derivabila partial. Derivata partiala de ordinul doi ın raport cu
variabilele xi si xj este atunci functia
∂2f
∂xj∂xi=
∂
∂xj
(∂f
∂xi
)= fxixj .
Adesea, pentru a simplifica notatia, vom scrie fij ın loc de fxixj .
Observatie. In exemplul de mai sus am avut fxy = fyx. Acest lucru nu
este ıntamplator. Mai exact, are loc urmatoarea teorema(proprietatea a
fost observata de L.Euler care a enuntat ın 1734 rezultatul, demonstrat mai
tarziu de catre Schwarz):
Teorema. (Criteriul lui Schwarz) Daca f : D ⊆ Rn −→ R este o

7.3. GRADIENT. DIFERENTIALA 59
functie de n variable, iar A ∈ D un punct din domeniul de definitie, ın care
f , fi, fj, fij si fji sunt continue, atunci are loc egalitatea
fij(A) = fji(A).
Corolar. Daca o functie f admite derivate mixte continue, atunci aceste
derivate mixte sunt egale.
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile. In mod analog
celui ın care am definit derivate partiale de ordinul doi, se pot defini derivate
partiale de ordin t pentru orice numar t ∈ N∗:
∂tf
∂xt1i1∂xt2i2 . . . ∂x
tkik
unde k ∈ N∗, t1, t2, . . . , tk ∈ N∗ cu t1 + t2 + . . . + tk = t, iar i1, i2, . . . , ik ∈{1, . . . , n}. Cum criteriul lui Schwarz se extinde ın mod natural la derivate
partiale de orice ordin, vom scrie cel mai adesea pentru o derivata de ordin
t mai simplu∂tf
∂xt11 ∂xt22 . . . ∂x
tnn
,
unde t1, t2, . . . , tn ∈ N cu t1 + t2 + . . .+ tn = t.
Definitie. O functie f : D ⊆ Rn −→ R de n variabile se numeste functie
de clasa Ck pe D(si scriem f ∈ Ck(D)) daca f admite derivate partiale de
ordinul k pe D, iar acestea sunt functii continue pe D.
Definitie. O functie f : D ⊆ Rn −→ R de n variabile se numeste functie
de clasa C∞ pe D(si scriem f ∈ C∞(D)) daca f este de clasa Ck pe D pentru
orice numar natural k.
Observatie. Orice polinom de n variabile este o functie de clasa C∞ pe
Rn.
7.3 Gradient. Diferentiala
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile definita pe o
multime deschisa D ⊆ Rn si A ∈ D un punct al domeniului de definitie
cu proprietatea ca f este derivabila partial ın raport cu fiecare variabila ın

60 7. DERIVATE PARTIALE
punctul A. Vectorul notat ∇f(A), care are drept componente derivatele
partiale ale functiei f ın punctul A
∇f(A) =
(∂f
∂x1
(A),∂f
∂x2
(A), . . . ,∂f
∂xn(A)
)
se numeste gradientul lui f ın punctul A. Daca f este derivabila partial pe
D, atunci gradientul lui f este functia vectoriala(i.e., cu domeniul de valori
un spatiu vectorial) ∇f : D −→ Rn, definita prin
∇f(X) =
(∂f
∂x1
(X),∂f
∂x2
(X), . . . ,∂f
∂xn(X)
), (∀)X ∈ D.
Exemplu. Fie f : R4 −→ R, f(X) = x21 − x2
2 + 3x1x2x3 − x4x1
. Vom
determina ∇f .
Solutie. Conform definitiei gradientului lui f , avem
∇f(X) = (fx1(X), fx2(X), fx3(X), fx4(X)) =
= (2x1 + 3x2x3 +x4
x21
,−2x2 + 3x1x3, 3x1x2,−1
x1
).
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile definita pe o
multime deschisa D ⊆ Rn si A ∈ D un punct al domeniului de definitie.
Spunem ca f este diferentiabila ın punctul A daca exista o aplicatie liniara
T : Rn −→ R si o functie g : V0 −→ R, unde V0 este o vecinatate a
originii spatiului Rn, astfel ıncat A + V0 ⊆ D, lim∆X−→0g(∆X)||∆X|| = 0 si are
loc egalitatea
f(A+ ∆X)− f(A) = T (∆X) + g(∆X).
Daca functia f este diferentiabila ın punctul A, forma liniara T de mai sus
se numeste diferentiala functiei f ın punctul A si se noteaza dAf .
Exemplu. Orice forma liniara f : Rn −→ R este diferentiabila ın orice
punct A ∈ Rn si dAf = f, (∀)A ∈ Rn.
Demonstratie. Datorita aditivitatii formei liniare f are loc egalitatea
f(A+ ∆X)− f(A) = f(∆X) + 0,
astfel ca este ındeplinita conditia din definitia de mai sus, cu T = f si
g = 0(functia constant nula).

7.3. GRADIENT. DIFERENTIALA 61
O formula a diferentialei unei functii este data de urmatoarea
Propozitie. Fie f derivabila partial ın raport cu toate variabilele pe o
vecinatate a unui punct A al domeniului de definitie, astfel ıncat derivatele
partiale sunt continue ın A. Atunci f este diferentiabila ın punctul A si
dAf(H) = (∇f(A), H) =
=∂f
∂x1
(A) · h1 +∂f
∂x2
(A) · h2 + . . .+∂f
∂xn(A) · hn, (∀)H ∈ Rn.
Am vazut ceva mai devreme ca o functie derivabila partial ıntr-un punct
nu este neaparat continua ın acel punct. Altfel stau lucrurile ın cazul unei
functii diferentiabile ıntr-un punct:
Propozitie. Daca f : D ⊆ Rn −→ R este o functie diferentiabila ın
punctul A ∈ D, atunci f este continua ın acel punct.
Demonstratie. Trebuie sa aratam ca limX−→A f(X) = f(A). Deoarece f
este diferentiabila ın A, are loc egalitatea
f(X)− f(A) = (∇f(A), X − A) + g(X − A).
Conform inegalitatii Cauchy-Buniakowski-Schwarz, avem ca
0 ≤ |(∇f(A), X − A)| ≤ ||∇f(A)|| · ||X − A||,
de unde rezulta ca limX−→A(∇f(A), X − A) = 0. De asemenea,
limX−→A
g(X − A) = limX−→A
g(X − A)
||X − A||· ||X − A|| = 0.
Prin urmare, limX−→A(f(X) − f(A)) = 0, de unde rezulta afirmatia din
enunt.
Alte proprietati ale functiilor diferentiabile sunt date de urmatoarea
Propozitie. Fie f si g functii de n variabile, diferentiabile pe o multime
deschisa D ⊆ Rn, iar α ∈ R un scalar oarecare. Atunci functiile f + g si
αf sunt diferentiabile pe D si au loc egalitatile
∇(f + g) = ∇f +∇g, ∇(αf) = α∇f.
Observatie. Din aceasta propozitie deducem ca multimea functiilor diferentiabile
pe o multime deschisa are o structura de spatiu vectorial real.

62 7. DERIVATE PARTIALE
7.3.1 Diferentierea functiilor compuse
Indicam aici cateva formule care reprezinta analoagele pentru functii de mai
multe variabile ale formulei de derivare a unei functii compuse cunoscute
pentru functii de o singura variabila:
(f ◦ g)′(t) = (f ′ ◦ g)(t) · g′(t).
Propozitie. Fie f : D ⊆ Rn −→ R o functie diferentiabila de n variabile si
g1, g2, . . . , gn : I ⊆ R −→ R functii derivabile de o variabila, cu proprietatea
ca
g(t) = (g1(t), g2(t), . . . , gn(t)) ∈ D, (∀)t ∈ I.
Atunci functia f ◦ g : I −→ R, data de (f ◦ g)(t) = f(g1(t), g2(t), . . . , gn(t))
este o functie derivabila de o variabila si are loc egalitatea
(f ◦ g)′(t) = (∇f(g(t)), g′(t)) =
=∂f
∂x1
(g(t)) · g′1(t) +∂f
∂x2
(g(t)) · g′2(t) + . . .+∂f
∂xn(g(t)) · g′n(t), (∀)t ∈ I,
unde g′(t) = (g′1(t), g′2(t), . . . , g′n(t)).
Exemplu. Fie z = f(x, y) = xy2 si fie x = cos t si y = sin t. Atunci
z = z(t) si z′(t) =∂f
∂x· x′(t) +
∂f
∂y· y′(t) =
= y2(− sin t) + 2xy(cos t) = (sin2 t)(− sin t) + 2(cos t)(sin t)(cos t) =
= 2 sin t cos2 t− sin3 t.
Propozitie. Fie f : D ⊆ Rn −→ R o functie diferentiabila de n variabile
si g1, g2, . . . , gn : G ⊆ Rm −→ R functii diferentiabile de m variabile, cu
proprietatea ca
g(Y ) = (g1(Y ), g2(Y ), . . . , gn(Y )) ∈ D, (∀)Y ∈ G.
Atunci functia h = f ◦ g : G −→ R, definita prin h(Y ) = (f ◦ g)(Y ) =
f(g1(Y ), g2(Y ), . . . , gn(Y )) este o functie diferentiabila de m variabile si au
loc egalitatile
∂h
∂yj=
∂f
∂x1
∂g1
∂yj+∂f
∂x2
∂g2
∂yj+ . . .+
∂f
∂xn
∂gn∂yj
, (∀)j = 1,m.

7.3. GRADIENT. DIFERENTIALA 63
Exemplu. Fie z = f(x, y) = sinxy2. Daca x = rs
si y = er−s, sa se
calculeze ∂z∂r
schi ∂z∂s
.
Solutie. Tinand cont de formulele de mai sus, putem scrie
∂z
∂r=∂f
∂x
∂x
∂r+∂f
∂y
∂y
∂r= (y2 cosxy2) · 1
s+ (2xy cosxy2) · er−s =
e2(r−s)
scos
(r
se2(r−s)
)+
2re2(r−s)
scos
(r
se2(r−s)
)si
∂z
∂s=∂f
∂x
∂x
∂s+∂f
∂y
∂y
∂s= (y2 cosxy2) ·
(− r
s2
)+ (2xy cosxy2) · (−er−s) =
−re2(r−s)
s2cos
(r
se2(r−s)
)− 2re2(r−s)
scos
(r
se2(r−s)
).
Definitie. Fie X, Y ∈ Rn. Segmentul [X, Y ] care uneste X si Y este
multimea
[X, Y ] = {V ∈ Rn | (∃)t ∈ [0, 1] : V = tX + (1− t)Y }.
Observatie. X = 1X + (1− 1)Y ∈ [X, Y ] si Y = 0X + (1− 0)Y ∈ [X, Y ].
Putem formula acum o extindere a teoremei cresterilor finite a lui Lagrange
Propozitie. Fie f : D ⊆ Rn −→ R o functie diferentiabila pe D si
X, Y ∈ D cu proprietatea ca [X, Y ] ⊆ D. Atunci exista un punct C ∈ [X, Y ]
cu proprietatea ca
f(Y )− f(X) = (∇f(C), Y −X).
Demonstratie. Fie g : [0, 1] −→ R definita prin g(t) = f(X + t(Y −X)) = (f ◦ h)(t), unde h : [0, 1] −→ Rn, h(t) = X + t(Y − X). Atunci
h(t) = X + t(Y −X) ∈ [X, Y ], (∀)t ∈ [0, 1], g(0) = f(X), g(1) = f(Y ) si g
este o functie derivabila. Aplicand teorema lui Lagrange pentru functia g,
rezulta ca exista t0 ∈ (0, 1) cu proprietatea ca
g(1)− g(0) = g′(t0)(1− 0) = g′(t0).
Dar
g′(t) = (∇f(h(t)), h′(t)) = (∇f(h(t)), Y −X),
astfel ca pentru C = h(t0) obtinem
f(Y )−f(X) = g(1)−g(0) = g′(t0) = (∇f(h(t0)), Y −X) = (∇f(C), Y −X).
Afirmatia este deci demonstrata.

64 7. DERIVATE PARTIALE
7.4 Hessiana unei functii ıntr-un punct
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile derivabila partial
de doua ori ın raport cu fiecare variabila pe multimea deschisa D ⊆ Rn si
A ∈ D un punct al domeniului de definitie al lui f . Matricea hessiana a
functiei f ın punctul A este matricea
Hf (A) =
∂2f∂x2
1(A) ∂2f
∂x1∂x2(A) . . . ∂2f
∂x1∂xn(A)
∂2f∂x2∂x1
(A) ∂2f∂x2
2(A) . . . ∂2f
∂x2∂xn(A)
...... . . . ...
∂2f∂xn∂x1
(A) ∂2f∂xn∂x2
(A) . . . ∂2f∂x2
n(A)
Observatie. Daca derivatele partiale mixte ale functiei f sunt continue, din
criteriul lui Schwarz rezulta ca matricea hessiana a functiei f este simetrica.
Exemplu. Fie f : D ⊆ R3 −→ R, definita prin
f(x, y, z) = ln(x+ 2y + 3z)
si A = (2, 2, 5). Vom determina matricea hessiana a functiei f ın punctul
A.
Solutie. Derivatele partiale de ordinul ıntai ale functiei f sunt
∂f
∂x=
1
x+ 2y + 3z,
∂f
∂y=
2
x+ 2y + 3z,
∂f
∂z=
3
x+ 2y + 3z.
Derivatele de ordinul al doilea sunt
∂2f∂x2 = − 1
(x+2y+3z)2∂2f∂x∂y = − 2
(x+2y+3z)2∂2f∂x∂z = − 3
(x+2y+3z)2
∂2f∂y∂x = − 2
(x+2y+3z)2∂2f∂y2 = − 4
(x+2y+3z)2∂2f∂y∂z = − 6
(x+2y+3z)2
∂2f∂z∂x = − 3
(x+2y+3z)2∂2f∂z∂y = − 6
(x+2y+3z)2∂2f∂z2 = − 9
(x+2y+3z)2

7.5. PROBLEME PROPUSE 65
Astfel ca matricea hessiana a functiei f ın punctul A = (2, 2, 5) este
Hf (2, 2, 5) =
− 1441 −
2441 −
3441
− 2441 −
4441 −
6441
− 3441 −
6441 −
9441
Definitie. Forma patratica care are drept coeficienti elementele matricei
hessiene Hf (A) ale unei functii f : D ⊆ Rn −→ R de n variabile ıntr-un
punct A ∈ D se numeste forma hessiana asociata functiei f ın punctul A.
Vom nota cu hf,A aceasta forma patratica
hf,A(z1, z2, . . . , zn) =∂2f
∂x21
(A)z21 +
∂2f
∂x22
(A)z22 + . . .+
∂2f
∂x2n
(A)z2n+
+2∂2f
∂x1∂x2
(A)z1z2 + 2∂2f
∂x1∂x3
(A)z1z3 + . . .+ 2∂2f
∂x1∂xn(A)z1zn+
+2∂2f
∂x2∂x3
(A)z2z3 + . . .+ 2∂2f
∂xn−1∂xn(A)zn−1zn
(Am presupus aici ca derivatele mixte sunt egale, asa cum este cazul aproape
ıntotdeauna.)
Exemplu. Pentru cazul functiei f : D ⊆ R3 −→ R, f(x, y, z) = ln(x +
2y + 3z), pentru care am determinat mai sus matricea hessiana ın punctul
A = (2, 2, 5), forma hessiana ın acelasi punct este
− 1
441(z2
1 + 4z22 + 9z2
3 + 4z1z2 + 6z1z3 + 12z2z3).
7.5 Probleme propuse
Calculati ∂z/∂x si ∂z/∂y pentru functiile urmatoare
1. z = x2y 2. z = xy2 3. 3exy3
4. z = sin(x2 + y3) 5. z = 4x/y5 6. z = eytg(x)
7. z = ln(x3y5 − 2) 8. z =√xy + 2y3 9. z = (x+ 5y sinx)4/3
Calculati derivatele partiale de ordinul ıntai si doi ale functiilor urmatoare
ın punctele indicate:

66 7. DERIVATE PARTIALE
10. f(x, y, z) = xyz, ın (2, 3, 4)
11. f(x, y, z) =√x+ 2y + 3z ın (2,−1, 3)
12. f(x, y, z) = x−yz
ın (−3,−1, 2)
13. f(x, y, z) = sin(x2 − y2 + z) ın (0, 1, 0)
14. f(x, y, z) = ln(x+ 2y + 3z) ın (2, 2, 5)
15. f(x, y, z) = tg xyz
ın (1, 2,−2)
16. f(x, y, z) = y3−z5x2y+z
ın (4, 0, 1)
17. f(x, y, z) = exy(ch(z)− sh(z)) ın (2, 3, 0)
18. f(x, y, z) =√x2 + y2 + z2 ın (a, b, c)
19. Costurile de productie ale unui fabricant pentru a produce x unitati
din produsul A si y unitati din produsul B este dat de
C(x, y) =50
2 + x+
125
(3 + y)2.
Calculati costul marginal al fiecarui produs.
20. Venitul realizat de acelasi fabricant este dat de
V (x, y) = ln(1 + 50x+ 75y) +√
1 + 40x+ 125y.
Calculati venitul marginal realizat cu fiecare produs.

8
Extreme locale ale functiilor de
mai multe variabile
Orice functie continua definita pe o multime compacte are urmatoarea pro-
prietate remarcabila:
Teorema lui Weierstrass Fie f : K ⊆ Rn −→ R o functie continua
avand drept domeniu de definitie o multime compacta K ⊆ Rn. Atunci
exista doua puncte X1, X2 ∈ K si doua numere reale m,M ∈ R cu propri-
etatea ca
m = f(X1) ≤ f(X) ≤ f(X2) = M, (∀)X ∈ K.
Definitie. Numerele reale m si M poarta numele de minim global, respec-
tiv maxim global al functiei f , iar punctele X1 si X2 ın care se ating aceste
valori se numesc punct de minim global, respectiv punct de maxim global.
Definitie. Fie f : D ⊆ Rn −→ R o functie de n variabile si A ∈ D un punct
al domeniului de definitie. Punctul A se numeste punct de maxim(minim)
local al functiei f daca exista o vecinatate V a sa cu proprietatea ca
f(X) ≤ f(A)(resp. f(X) ≥ f(A)), (∀)X ∈ V ∩D.
Valoarea f(A) a functiei f ın punctul A se numeste maxim local(respectiv
minim local) al functiei f .
Valorile minime sau maxime(locale sau globale) ale unei functii se numesc
extreme ale functiei, iar punctele ın care se ating aceste valori se numesc
67

68 8. EXTREME LOCALE ALE FUNCTIILOR DE MAI MULTE VARIABILE
puncte de extrem.
8.1 Extreme locale neconditionate ale functiilor
diferentiabile
Propozitie. Fie f : D ⊆ Rn −→ R o functie diferentiabila de n variabile
definita pe multimea deschisa D ⊆ Rn si A ∈ D un punct de extrem local.
Atunci
∇f(A) = 0.
Demonstratie. Fie A = (a1, a2, . . . , an) si hi : Ii −→ R functia definita
prin hi(x) = f(a1, . . . , ai−1, x, ai+1, . . . , an) pe un interval Ii cu propietatea
ca ai ∈ Ii si (a1, . . . , ai−1, x, ai+1, . . . , an) ∈ D, (∀)x ∈ Ii. Conform enuntului,
rezulta ca hi este derivabila pe Ii si ai este un punct de extrem local pentru
functia hi. Conform teoremei lui Fermat, avem atunci
h′i(ai) = 0.
dar din definitia lui hi rezulta ca
h′i(ai) =∂f
∂xi(A).
Prin urmare, obtinem ca
∂f
∂xi(A) = 0, (∀)i = 1, n,
adica ∇f(A) = 0.
Definitie. Un punct A se numeste punct critic al unei functii f daca f
este diferentiabila ın A si ∇f(A) = 0.
Observatie. Din propozitia de mai sus avem ca orice punct de extrem local
al unei functii diferentiabile este un punct critic. Reciproca nu este ın gen-
eral adevarata, adica nu orice punct critic este neaparat un punct de extrem.
Exemplu. Fie f : R2 −→ R, f(x, y) = 1 + x2 + 3y2. Atunci ∇f(x, y) =
(2x, 6y), astfel ca singurul punct critic al functiei f este (0, 0), care este

8.1. EXTREME NECONDITIONATE 69
evident un punct de minim local(si chiar global).
Exemplu. Fie f : R2 −→ R, f(x, y) = 1 − x2 − 3y2. Atunci ∇f(x, y) =
(−2x,−6y), care se anuleaza numai pentru (0, 0), care este un punct de
maxim local(si chiar global).
Exemplu. Fie f : R2 −→ R, f(x, y) = x2 − y2. Avem ∇f(x, y) =
(2x,−2y), deci singurul punct critic este (0, 0). Acesta ınsa nu este nici
punct de maxim local, deoarece ın orice vecinatate a sa se gasesc puncte
(x, y) cu |x| > |y|, pentru care f(x, y) > 0, nici punct de minim local,
caci orice vecinatate a sa contine puncte (x, y) cu |x| < |y|, pentru care
f(x, y) < 0.
Definitie. Un punct critic al unei functii derivabile f care nu este punct
de extrem local al functiei f , se numeste punct-sa al lui f .
Pentru a recunoaste care dintre punctele critice ale unei functii sunt
puncte de extrem local, vom utiliza polinoamele de aproximare ale lui Tay-
lor:
Fie f : D ⊆ Rn −→ R o functie diferentiabila de n variabile, definita
pe multimea deschisa D, si fie A ∈ D un punct critic al lui f . Conform
teoremei lui Taylor, ıntr-o vecinatate V ⊆ D a punctului A putem scrie
f(X) = T2(f ;A)(X) +R2(f ;A)(X), (∀)X ∈ V,
unde T2(f ;A)(X) este polinomul Taylor de ordinul 2 asociat functiei f ın
jurul punctului A, iar R2(f ;A)(X) este restul formulei lui Taylor de ordinul
2, despre care stim ca
limX−→A
R2(f ;A)(X)
||X − A||2= 0.
Polinomul Taylor de ordinul 2 asociat lui f ın jurul lui A este
T2(f ;A)(X) = f(A) +∂f(A)
∂x1
(x1 − a1) + . . .+∂f(A)
∂xn(xn − an)+
+∂2f(A)
∂x21
(x1 − a1)2 + . . .+∂2f(A)
∂x2n
(xn − an)2+
+2∂2f(A)
∂x1∂x2
(x1 − a1)(x2 − a2) + . . .+ 2∂2f(A)
∂xn−1∂xn(xn−1 − an−1)(xn − an)

70 8. EXTREME LOCALE ALE FUNCTIILOR DE MAI MULTE VARIABILE
Cu notatiile si definitiile din paragraful precedent putem scrie
T2(f ;A)(X) = f(A) + (∇f(A), X − A) + hf,A(X − A).
Tinand cont de faptul ca A este un punct critic, din formula lui Taylor de-
ducem urmatoarea aproximare, valabila ıntr-o vecinatate a punctului critic
A:
f(X) ≈ f(A) + hf,A(X − A),
sau
f(X)− f(A) ≈ hf,A(X − A).
Deducem ca un punct critic este
• punct de minim, daca hessiana hf,A este pozitiv definita.
• punct de maxim, daca hessiana hf,A este negativ definita.
• punct-sa, daca hessiana hf,A este nedefinita.
In celelalte situatii, cand hessiana este semidefinita, punctul critic poate fi
de oricare din cele trei tipuri(minim, maxim, punct-sa).
Exemplu. Fie f(x, y) = 2x3 − 24xy + 16y3. Vom determina natura
punctelor critice ale lui f .
Solutie. Gradientul lui f este ∇f(x, y) = (6x2 − 24y,−24x+ 48y2), astfel
ca punctele critice ale lui f sunt solutiile sistemului x2 − 4y = 0
x− 2y2 = 0⇐⇒
4y4 − 4y = 0
x = 2y2
Solutiile acestui sistem sunt (0, 0) si (2, 1). Matricea hessiana a functiei f
ıntr-un punct oarecare (x, y) este
Hf (x, y) =
12x −24
−24 96y
Forma hessiana este atunci
hf ;(x,y)(z1, z2) = 12xz21 + 96yz2
2 − 48z1z2.
Pentru punctul critic (0, 0), forma hessiana este
hf ;(0,0)(z1, z2) = −48z1z2,

8.2. EXTREME CONDITIONATE 71
care este o froma nedefinita, deci (0, 0) este un punct-sa. In punctul critic
(2, 1) avem
hf ;(2,1)(z1, z2) = 24z21 + 96z2
2 − 48z1z2 = 24((z1 − z2)2 + 3z22),
deci forma hessiana este pozitiv definita, astfel ca punctul (2, 1) este un
punct de minim local.
Etapele pe care le parcurgem deci cand dorim sa determinam punctele
de extrem local ale unei functii dierentiabile definite pe o multime deschisa,
sunt:
• Calculam derivatele partiale de ordinul ıntai si de ordinul doi.
• Determinam punctele critice.
• Pentru fiecare punct critic ın parte construim forma hessiana asociata
functiei ın acel punct si studiem definirea(pozitiva, negativa sau ”non”),
studiu din care deducem daca punctul critic este un punct de extrem lo-
cal(minim sau maxim) sau un punct-sa.
8.2 Extreme locale conditionate. Regula mul-
tiplicatorilor lui Lagrange
In probleme de optimizare cautam de multe ori sa determinam valori ex-
treme(locale sau globale) a unei functii ale carei variabile nu sunt ”libere”,
ci conditionate de anumite restrictii:
max(min)[f = f(x1, x2, . . . , xn)]
g1(x1, x2, . . . , xn) = 0
g2(x1, x2, . . . , xn) = 0
. . . . . . . . . . . . . . . . . . . . .
gm(x1, x2, . . . , xn) = 0
Pentru puncte de extrem conditionat este valabila urmatoarea propri-
etate
Propozitie. Fie f, g1, . . . , gm : D ⊆ Rn −→ R functii diferentiabile de n
variabile, si A ∈ Dr = {X ∈ D|gj(X) = 0, (∀)j = 1,m}. Daca punctul

72 8. EXTREME LOCALE ALE FUNCTIILOR DE MAI MULTE VARIABILE
A este un punct de extrem local al functiei f ın raport cu multimea Dr a
punctelor din D care respecta conditiile g1(X) = 0, . . . , gm(X) = 0, atunci
exista numere reale λ1, . . . , λm ∈ R cu proprietatea ca
∇f(A) = λ1∇g1(A) + . . .+ λm∇gm(A).
Definitie. Numerele λ1, . . . , λm care au aparut mai sus poarta numele de
multiplicatori ai lui Lagrange.
Vom prezenta ın continuare Metoda multiplicatorilor lui Lagrange
pentru determinarea punctelor de extrem local conditionat ale unei functii.
Fie deci f, g1, . . . , gm : D ⊆ Rn −→ R functii diferentiabile de n variabile,
si Dr = {X ∈ D|gj(X) = 0, (∀)j = 1,m} multimea punctelor din D care
respecta conditiile g1(X) = 0,. . . , gm(X) = 0. Etapele pe care le parcurgem
pentru a determina punctele de extrem local ale functiei f ın raport cu
multimea Dr sunt:
• Construim functia lui Lagrange L : D×Rm −→ R asociata functiei f
si conditiilor exprimate cu ajutorul functiilor g1, . . . , gm:
L(x1, . . . , xn, λ1, . . . , λm) = f(x1, . . . , xn)−
−λ1g1(x1, . . . , xn)− . . .− λmgm(x1, . . . , xn).
• Calculam derivatele partiale de ordinul ıntai si doi ale functiei lui La-
grange(pentru derivatele de ordinul al doilea este suficient sa calculam doar
derivatele ın raport cu variabilele xi).
• Rezolvam sistemul de ecuatii ∇L(x1, . . . , xn, λ1, . . . , λm) = 0:
∂f∂x1
(X,λ)− λ1∂g1∂x1
(X,λ)− . . .− λm∂gm∂x1
(X,λ) = 0
∂f∂x2
(X,λ)− λ1∂g1∂x2
(X,λ)− . . .− λm∂gm∂x2
(X,λ) = 0
. . . . . . . . . . . . . . . . . . . . . . . . . . .∂f∂xn
(X,λ)− λ1∂g1∂xn
(X,λ)− . . .− λm∂gm∂xn
(X,λ) = 0
g1(x1, . . . , xn) = 0
. . . . . . . . . . . . . . . . . . . . . . . . . . .
gm(x1, . . . , xn) = 0

8.2. EXTREME CONDITIONATE 73
aceasta este doar o transcriere a conditiilor ∇f(A) = λ1∇g1(A) + . . . +
λm∇gm(A), g1(A) = 0,. . . , gm(A) = 0, pe care trebuie sa le verifice un
punct de extrem conditionat.
• Pentru fiecare solutie (A, µ) a sistemului de mai sus, studiem semnul pe
care ıl poate lua forma patratica
hf ;A;µ : Rn −→ R, hf ;A;µ(z1, . . . , zn) =∂2L(A, µ)
∂x21
z21 + . . .+
∂2L(A, µ)
∂x2n
z2n+
+2∂2L(A, µ)
∂x1∂x2
z1z2 + 2∂2L(A, µ)
∂xn−1∂xnzn−1zn,
ale carei variabile nu sunt libere, ci verifica conditiile
dA(gj)(z1, . . . , zn) = 0, (∀)j = 1,m
(corespunzatoare faptului ca vrem sa comparam valoarea functiei f ın punc-
tul A doar cu valori ale lui f ın puncte dintr-o vecinatate a lui A care se
gasesc ın multimea Dr). Aceste conditii se pot transcrie sub forma
∂g1∂x1z1 + ∂g1
∂x2z2 + . . .+ ∂g1
∂xnzn = 0
∂g2∂x1z1 + ∂g2
∂x2z2 + . . .+ ∂g2
∂xnzn = 0
. . . . . . . . . . . . . . . . . . . . . . . . . . .∂gm∂x1
z1 + ∂gm∂x2
z2 + . . .+ ∂gm∂xn
zn = 0
Din acest sistem vom putea exprima m dintre variabilele zk ın functie de
celelalte n −m, astfel ca, ınlocuind ın forma patratica hf ;A;µ, vom ajunge
sa studiem definirea unei forme patratice cu n−m variabile independente.
• In functie de rezultatul obtinut, vom putea deduce natura punctului critic
A ∈ Dr:
- daca forma patratica este pozitiv definita, atunci A este un punct de
minim local conditionat.
- daca forma patratica este negativ definita, atunci A este un punct de
maxim local conditionat.
- daca forma patratica este nedefinita, atunci A nu este punct de extrem
local conditionat.
Exemplu. Fie f : R3 −→ R, definita prin f(x1, x2, x3) = x21 + x2
2 + x23,
si fie g1, g2 : R3 −→ R, g1(x1, x2, x3) = 2x1 + x2 + x3 − 2, g2(x1, x2, x3) =

74 8. EXTREME LOCALE ALE FUNCTIILOR DE MAI MULTE VARIABILE
x1− x2− 3x3− 4. Vom ıncerca sa determinam punctele de extrem local ale
lui f ın raport cu conditiile g1(x) = 0 si g2(x) = 0.
Solutie. • In primul rand construim functia lui Lagrange
L : R5 −→ R, L(x1, x2, x3, λ1, λ2) = x21 + x2
2 + x23−
−λ1(2x1 + x2 + x3 − 2)− λ2(x1 − x2 − 3x3 − 4).
• Derivatele partiale ale functiei lui Lagrange sunt
∂L∂x1
= 2x1 − 2λ1 − λ2∂L∂λ1
= −(2x1 + x2 + x3 − 2)
∂L∂x2
= 2x2 − λ1 + λ2,∂L∂λ2
= −(x1 − x2 − 3x3 − 4)
∂L∂x3
= 2x3 − λ1 + 3λ2
iar cele de ordinul doi sunt
∂2L
∂x21
=∂2L
∂x22
=∂2L
∂x23
= 2,
∂2L
∂x1∂x2
=∂2L
∂x1∂x3
=∂2L
∂x2∂x3
= 0,
• Sistemul asociat este
2x1 − 2λ1 − λ2 = 0
2x2 − λ1 + λ2 = 0
2x3 − λ1 + 3λ2 = 0
2x1 + x2 + x3 − 2 = 0
x1 − x2 − 3x3 − 4 = 0
Solutia acestui sistem este(
4431, 1
31, −27
31; 30
31, 28
31
), deci avem un singur punct
critic, a =(
4431, 1
31, −27
31
), si corespunzator valorile multiplicatorilor sunt µ =(
3031, 28
31
).
• Forma patratica asociata este
hf ;a;µ(z1, z2, z3) = 2z21 + 2z2
2 + 2z23 ,
iar variabilele z1, z2, z3 satisfac conditiile
dA(g1)(z1, z2, z3) = 0 si dA(g2)(z1, z2, z3) = 0,

8.3. PROBLEME PROPUSE 75
adica sistemul de ecuatii 2z1 + z2 + z3 = 0
z1 − z2 − 3z3 = 0
cu solutia z1 = 23z3, z2 = −7
3z3, z3 ∈ R.
• Forma patratica hf ;A;µ se poate scrie atunci ca o forma patratica de o
singura variabila(i.e., o functie de gradul II): h(z3) = 1249z2
3 , care este
evident pozitiv definita, astfel ca punctul A =(
4431, 1
31, −27
31
)este un punct
de minim local conditionat.
8.3 Probleme propuse
Determinati punctele de extrem local si valorile extreme locale corespunzatoare
ale urmatoarelor functii(domeniul de definitie se presupune ca este cel maxim
posibil):
1. f(x, y) = 7x2 − 8xy + 3y2 + 1
2. f(x, y) = x2 + y3 − 3xy
3. f(x, y) = xy2 + x2y − 3xy
4. f(x, y) = 1y− 1
x− 4x+ y
5. f(x, y) = x4 + y4 − 2x2 + 4xy − 2y2
6. f(x, y) = 1+x−y√1+x2+y2
7. f(x, y, z) = x2 + y2 + z2 − 2x+ 4y − 6z − 11
8. f(x, y, z) = x+ y2
4x+ z2
y+ 2
z(x > 0, y > 0, z > 0).
Determinati puntele de extrem conditionat ale functiilor urmatoare
9. f(x, y) = xy daca x+ y = 1
10. f(x, y) = x+ 2y daca x2 + y2 = 5
11. f(x, y) = x2 + y2 daca 3x+ 2y = 6
12. f(x, y, z) = x− 2y + 2z daca x2 + y2 + z2 = 9
13. f(x, y, z) = xy2z3 daca x+ y + z = 12(x > 0, y > 0, z > 0)
14. f(x, y, z) = xyz daca x+ y + z = 5, xy + xz + yz = 8

76 8. EXTREME LOCALE ALE FUNCTIILOR DE MAI MULTE VARIABILE
9
Elemente de calcul integral
9.1 Primitive
Definitie. Fie f : I −→ R o functie definita pe un interval I ⊆ R. Spunem
ca f admite primitive pe I daca exista o functie F : I −→ R, astfel ıncat
a) F este derivabila pe I;
b) F ′(x) = f(x), (∀)x ∈ I.
Functia F se numeste o primitiva a functiei f .
Propozitie. Fie f : I −→ R o functie care admite primitive pe I. Daca
F1, F2 : I −→ R sunt doua primitive ale lui f , atunci exista o constanta
C ∈ R cu proprietatea ca F2(x) = F1(x) + C, (∀)x ∈ I.
Definitie. Fie f : I −→ R o functie care admite primitive. Multimea
primitivelor lui f se numeste integrala nedefinita a functiei f , notata∫f(x) dx
Notand cu C multimea functiilor constante definite pe I, daca F este o
primitiva a lui f , atunci ∫f(x) dx = F + C .
Propozitie. O functie care admite primitive are proprietatea lui Darboux.
Propozitie. O functie continua pe un interval admite primitive pe acel
interval.
Propozitie. Daca f, g : I −→ R sunt functii care admit primitive, iar
λ ∈ R, atunci f + g si λ · f sunt functii care admit primitive. Pentru
77

78 9. ELEMENTE DE CALCUL INTEGRAL
acestea, ∫(f(x) + g(x)) dx =
∫f(x) dx+
∫g(x) dx ,∫
(λ · f(x)) dx = λ ·∫f(x) dx .
Propozitie. (formula de integrare prin parti) Daca f, g : I −→ R
sunt functii derivabile cu derivate continue, atunci functiile f ′g si fg′ admit
primitive pe I si∫f ′(x)g(x) dx = f(x)g(x)−
∫f(x)g′(x) dx .
Teorema. (prima metoda de schimbare de variabila) Fie I, J ⊆ R
doua intervale si φ : I −→ J , f : J −→ R doua functii cu proprietatile:
a) φ este derivabila pe I;
b) f admite primitive pe J .
Atunci functia (f ◦ φ) · φ′ admite primitve pe I, iar daca F este o primitiva
a lui f , atunci F ◦ φ este o primitiva a lui (f ◦ φ) · φ′, astfel ca∫f(φ(x)) · φ′(x) dx = F (φ(x)) + C .
Observatie. In aplicarea primei metode de schimbare de variabila dis-
tingem:
- o functie de integrat h : I −→ R;
- se cauta doua functii cu proprietatile din teorema de mai sus, astfel ıncat
h(x) = f(φ(x)) · φ′(x), (∀)x ∈ I;
- se cauta o primitiva F a lui f ;
- se determina o primitiva H a functiei h prin H = F ◦ φ:∫h(x) dx =
∫f(φ(x)) · φ′(x) dx = F (φ(x)) + C .
Teorema. (a doua metoda de schimbare de variabila) Fie I, J ⊆ R
doua intervale si φ : I −→ J , f : J −→ R doua functii cu proprietatile:
a) φ este bijectiva, derivabila, cu derivata nenula;
b) functia h = (f ◦ φ) · φ′ admite primitive.
Atunci functia f admite primitive, iar daca H este o primiiva a lui h, atunci
H ◦ φ−1 este o primitiva a lui f , astfel ca∫f(x) dx = H(φ−1(x)) + C .
Observatie. In aplicarea celei de-a doua metode de schimbare de variabila
distingm:

9.1. PRIMITIVE 79
- functia de integrat f : J −→ R;
- se cauta φ : I −→ J , bijectiva, derivabila si cu derivata nenula;
- se construieste functia h(t) = f(φ(t)) · φ′(t);- se cauta o primitiva H a functiei h;
- se obtine o primitiva F a functiei f prin F = H ◦ φ−1:∫f(x) dx =
∫h(φ−1(x)) · 1
φ′(φ(x))dx = H(φ−1(x)) + C .
9.1.1 Primitive reductibile la primitivele functiilor rationale
In acest paragraf, prin R(x, y, z, . . .) vom ıntelege o functie rationala ın vari-
abilele x, y, z, . . .
Integrale de forma∫R(x, xr1 , xr2 , . . .) dx
Daca r1 = p1q1, r2 = p2
q2, . . . ∈ Q, iar n = c.m.m.m.c. al numerelor naturale
q1, q2, . . ., se face substitutia x = tn.
Integrale de forma∫R(eλx) dx, λ ∈ R∗
Se face substitutia eλx = t.
Integrale de forma∫R(x, n1
√ax+ b, n2
√ax+ b, . . .) dx
Daca n = c.m.m.m.c. al numerelor naturale n1, n2, . . ., se face substitutian√ax+ b = t.
Integrale de forma∫R(x, n
√ax+bcx+d
) dx
Se face substitutia n
√ax+bcx+d
= t ⇐⇒ ax+bcx+d
= tn.
Integrale de forma∫R(x,
√ax2 + bx+ c) dx
Se face una dintre substitutiile lui Euler: i) Daca a > 0, alegem t =√ax2 + bx+ c± x
√a.
ii) Daca c > 0 si 0 6∈ I, alegem t =√ax2+bx+c±
√c
x.
iii) Daca b2 − 4ac > 0, ax2 + bx + c = a(x − x1)(x − x2) si x1 6∈ I, alegem
t =√ax−x2x−x2 .

80 9. ELEMENTE DE CALCUL INTEGRAL
De asemenea, se pot folosi substitutii trigonometrice:
i) Pentru∫R(x,
√a2 − x2) dx, alegem x = a sin(t) sau x = a cos(t).
ii) Pentru∫R(x,
√a2 + x2) dx, alegem x = a tg(t).
iii) Pentru∫R(x,
√x2 − a2) dx, alegem x = a sec(t).
Integrale de forma∫xm(axn + b)p dx, cu m,n, p ∈ Q
Se face una dintre substitutiile lui Cebısev:
i) Daca p ∈ Z si m+1n
= rs, alegem t = (xn)
1s .
ii) Daca m+1n∈ Z si p = r
s, alegem t = (axn + b)
1s .
iii) Daca m+1n
+ p ∈ Z si p = rs, alegem t = (a+ bx−n)
1s .
Integrale de forma∫R(sin(x), cos(x)) dx
i) Daca R(−sin(x), cos(x)) = −R(sin(x), cos(x)), alegem t = cos(x).
ii) Daca R(sin(x),−cos(x)) = −R(sin(x), cos(x)), alegem t = sin(x).
iii) Daca R(−sin(x),−cos(x)) = R(sin(x), cos(x)), alegem t = tg(x).
iv) In celelalte cazuri se poate folosi substitutia t = tgx2.
9.2 Functii integrabile. Integrala definita
Definitie. Fie f : [a, b] −→ R o functie, definita pe un interval [a, b], ∆ =
(a = x0 < x1 < x2 < . . . < xn−1 < xn = b) o diviziune a intervalului, iar ξ =
(ξ1, ξ2, . . . , ξn) un sistem de puncte intermediare(i.e. ξi ∈ [xi−1, xi], (∀)i =
1, n). Suma Riemann asociata functiei f , diviziunii ∆ si sistemului de
puncte intermediare ξ este numarul real
σ∆(f ; ξ) =n∑i=1
f(ξi) · (xi − xi−1) .
Definitie. O functie f : [a, b] −→ R se numeste functie integrabila
Riemann daca exista un numar I ∈ R astfel ıncat pentru orice ε > 0,
exista ηε > 0 cu proprietatea ca pentru orice diviziune ∆ = (a = x0 < x1 <
x2 < . . . < xn−1 < xn = b) cu norma ||∆|| = maxi=1,n(xi−xi−1) < ηε si orice
sistem de puncte intermediare ξ = (ξ1, ξ2, . . . , ξn), cu ξ ∈ [xi−1, xi], (∀)i =

9.2. FUNCTII INTEGRABILE. INTEGRALA DEFINITA 81
1, n are loc inegalitatea |σ∆(f ; ξ)−I| < ε. In acest caz, numarul I se numeste
integrala definita a functiei f pe intervalul [a, b] si se noteaza
I =∫ b
af(x) dx .
Observatie. Pentru o functie integrabila Riemann f : [a, b] −→ R, inte-
grala I =∫ ba f(x) dx este unic determinata.
Observatie. Orice functie integrabila Riemann pe un interval este marginita.
Teorema. O functie f : [a, b] −→ R este integrabila Riemann daca si nu-
mai daca pentru orice sir de diviziuni (∆n)n≥1, ∆n = (a = xn0 < xn1 < . . . <
xnln = b) cu limn−→∞ ||∆n|| = 0 si orice sisteme de puncte intermediare aso-
ciate acestora ξn = (ξn1 , ξn2 , . . . , ξ
nln), cu ξni ∈ [xni−1, x
ni ], atunci sirul sumelor
Riemann corespunzatoare (σ∆n(f ; ξn))n este convergent. In acest caz lim-
itele tuturor acestor siruri coincid, iar daca I ∈ R este limita lor comuna,
atunci ∫ b
af(x) dx = lim
||∆n||−→0σ∆n(f ; ξn) = I .
Definitie. Fie f : [a, b] −→ R si ∆ = (a = x0 < x1 < . . . < xn = b)
o diviziune a intervalului [a, b]. Pentru fiecare i = 1, n, notam mi =
infx∈[xi−1,xi] f(x) si Mi = supx∈[xi−1,xi]f(x). Suma inferioara Darboux
asociata functiei f si diviziunii ∆ este numarul s∆(f) =∑ni=1mi(xi −
xi−1). Suma superioara Darboux asociata functiei f si diviziunii ∆
este numarul S∆(f) =∑ni=1Mi(xi − xi−1).
Teorema. O functie marginita f : [a, b] −→ R este integrabila Riemann
daca si numai daca pentru orice ε > 0 exista ηε > 0 cu proprietatea ca pen-
tru orice diviziune ∆ a intervalului [a, b] cu ||∆|| < ηε are loc inegalitatea
S∆(f)− s∆(f) < ε.
Teorema. Orice functie monotona f : [a, b] −→ R este integrabila.
Teorema. Orice functie continua f : [a, b] −→ R este integrabila.
Teorema. (Leibniz-Newton) Daca f : [a, b] −→ R este o functie
integrabila Riemann care admite primitive, iar F este o primitiva a sa,
atunci ∫ b
af(x) dx = F (b)− F (a) .
Propozitie. (liniaritatea integralei) Daca f, g : [a, b] −→ R sunt doua
functii integrabile, iar λ, µ ∈ R, atunci functia λ · f + µ · g este integrabila
82 9. ELEMENTE DE CALCUL INTEGRAL
si ∫ b
a(λ · f(x) + µ · g(x)) dx = λ ·
∫ b
af(x) dx+ µ ·
∫ b
ag(x) dx .
Propozitie. (aditivitatea integralei) Daca f : [a, b] −→ R este o functie
integrabila Riemann, iar c ∈ (a, b), atunci
∫ b
af(x) dx =
∫ c
af(x) dx+
∫ b
cf(x) dx .
Corolar. Daca f : [a, b] −→ R este o functie integrabila Riemann, atunci
∫ aa f(x) dx = 0 ;∫ ab f(x) dx = −
∫ ba f(x) dx .
Propozitie. Daca f, g : [a, b] −→ R sunt doua functii integrabile, cu
proprietatea ca f(x) ≤ g(x), (∀)x ∈ [a, b], atunci
∫ b
af(x) dx ≤
∫ b
ag(x) dx .
Teorema de medie Daca f : [a, b] −→ R este o functie continua, atunci
exista c ∈ (a, b), astfel ıncat
∫ b
af(x) dx = f(c) · (b− a) .
Teorema de existenta a primitivelor pentru functiile continue Daca
f : [a, b] −→ R este o functie continua, x0 ∈ [a, b] si y0 ∈ R, atunci functia
F : [a, b] −→ R, definita prin
F (x) =∫ x
x0dx+ y0
este o primitiva a functiei f , pentru care F (x0) = y0.
Propozitie. (formula de integrare prin parti) Daca f, g : [a, b] −→R sunt doua functii derivabile, cu derivatele continue, atunci∫ b
af(x) · g′(x) dx = (f(x) · g(x))|ba −
∫ b
af ′(x) · g(x) dx ,
unde (f(x) · g(x))|ba = f(b) · g(b)− f(a) · g(a).
Propozitie. (formula de schimbare de variabila(I)) Fie h : [a, b] −→R o functie cu proprietatea ca exista doua functii φ : [a, b] −→ I si f :

9.3. APLICATII ALE INTEGRALELOR DEFINITE 83
I −→ R, astfel ıncat φ este derivabila cu derivata continua, f continua, iar
pentru orice x ∈ [a, b], h(x) = f(φ(x)) · φ′(x). Atunci∫ b
ah(x) dx =
∫ b
af(φ(x)) · φ′(x) dx =
∫ φ(b)
φ(a)f(t) dt .
Propozitie. (formula de schimbare de variabila(II)) Fie f : [a, b] −→R o functie continua si φ : [c, d] −→ [a, b] o functie bijectiva si derivabila,
cu derivata nenula. Atunci∫ b
af(x) dx =
∫ φ−1(b)
φ−1(a)f(φ(t)) · φ′(t) dt .
9.3 Aplicatii ale integralelor definite
9.3.1 Aria subgraficului unei functii continue si pozi-
tive
Definitie. Fie f : [a, b] −→ R o functie continua, cu f(x) ≥ 0, (∀)x ∈ [a, b].
Multimea
Γf = {(x, y) ∈ R2|x ∈ [a, b], 0 <≤ y ≤ f(x)}
se numeste subgraficul functiei f .
Propozitie. Fie f : [a, b] −→ R o functie continua, cu f(x) ≥ 0, (∀)x ∈[a, b]. Atunci
Aria(Γf ) =∫ b
af(x) dx .
Corolar. Daca f, g : [a, b] −→ R sunt doua functii continue, cu g(x) ≤f(x), (∀)x ∈ [a, b], iar
Γg,f = {(x, y) ∈ R2|x ∈ [a, b], g(x) <≤ y ≤ f(x)} ,
atunci
Aria(Γg,f ) =∫ b
a(g(x)− f(x)) dx .
9.3.2 Lungimea graficului unei functii derivabile cu
derivata continua
Propozitie. Fie f : [a, b] −→ R o functie derivabila cu derivata continua.
Lungimea graficului functiei f este atunci
l(f) =∫ b
a
√1 + (f ′(x))2 dx .

84 9. ELEMENTE DE CALCUL INTEGRAL
9.3.3 Volumul unui corp de rotatie
Definitie. Fie f : [a, b] −→ R o functie continua, cu f(x) ≥ 0, (∀)x ∈ [a, b].
Multimea
Cf = {(x, y, z) ∈ R3|x ∈ [a, b],√y2 + z2 ≤ f(x)}
se numeste corp de rotatie generat prin rotirea aubgraficului functiei
f ın jurul axei Ox.
Propozitie. Fie f : [a, b] −→ R o functie continua, cu f(x) ≥ 0, (∀)x ∈[a, b]. Atunci volumul corpului de rotatie Cf este
V ol(Cf ) = π ·∫ b
af 2(x) dx .
9.3.4 Aria suprafetelor de rotatie
Definitie. Fie f : [a, b] −→ R+ o functie derivabila cu derivata continua.
Suprafata de rotatie generata de rotirea graficului functiei f ın
jurul axei Ox este multimea
Sf = {(x, y, z) ∈ R3|x ∈ [a, b],√y2 + z2 = f(x)} .
Propozitie. Fie f : [a, b] −→ R+ o functie derivabila cu derivata continua.
Aria suprafetei de rotatie Sf este
Aria(Sf ) = 2π ·∫ b
af(x) ·
√1 + (f ′(x))2 dx .
9.3.5 Centre de greutate
Def O placa plana P se numeste omogena daca exista o constanta ρ > 0,
numita densitate superficiala, astfel ıncat masa oricarei portiuni A ⊆ P
a placii P sa fie data de m(A) = ρ · Aria(A).
Propozitie. Daca P1, P2, . . . , Pn sunt placi plane omogene cu aceeasi
densitate superficiala si avand interioarele disjuncte doua cate doua, de
centre de greutat Gi(xi, yi), i = 1, n, atunci reuniunea placilor are centrul
de greutate G cu coordonatele date de
xG =
∑ni=1 xi · Aria(Pi)∑ni=1Aria(Pi)
, yG =
∑ni=1 yi · Aria(Pi)∑ni=1Aria(Pi)
.

9.3. APLICATII ALE INTEGRALELOR DEFINITE 85
Propozitie. Fie f : [a, b] −→ R o functie continua, cu f(x) ≥ 0, (∀)x ∈[a, b]. Atunci placa plana omogena Pf reprezentata prin subgraficul Γf al
functiei f are centrul de greutate G cu coordonatele date de
xG =
∫ ba x · f(x) dx∫ ba f(x) dx
, yG =1
2·∫ ba f
2(x) dx∫ ba f(x) dx
.
Propozitie. Fie f, g : [a, b] −→ R doua functii continue, cu proprietatea
ca g(x) ≤ f(x), (∀)x ∈ [a, b]. Placa omogena Pg,f reprezentata de multimea
Γg,f are atunci coordonatele centrului de greutate date de
xG =
∫ ba x · (f(x)− g(x)) dx∫ ba (f(x)− g(x)) dx
, yG =1
2·∫ ba (f 2(x)− g2(x)) dx∫ ba (f(x)− g(x)) dx
.

86 9. ELEMENTE DE CALCUL INTEGRAL
10
Ecuatii diferentiale
10.1 Introducere ın teoria ecuatiilor diferentiale
Fenomenele din natura si societate au adesea un pronuntat caracter dinamic,
ele fiind procese evolutive ın timp conform unor legi proprii. Exemple de
asemenea fenomene pot fi evolutia unui grup biologic sau social, precum si
o reactie chimica.
Studiul unui asemenea proces evolutiv presupune urmarirea unui numar
de parametri care caracterizeaza procesul sau fenomenul respectiv. In lim-
baj matematic, acest grup de parametri reprezinta starea sistemului sau a
procesului si formeaza un grup de functii dependente de timp. De exem-
plu, starea unei populatii poate fi descrisa prin numarul de indivizi din care
este compusa. Starea unei reactii chimice poate fi data, dupa caz, de tem-
peratura sau concentratia uneia sau mai multor substante care participa la
reactie.
Starea sistemului apare relativ rar ca o functie explicita de timp, ci,
mult mai adesea, ca solutie a unei anumite ecuatii care descrie o lege ce
guverneaza fenomenul respectiv.
Modelarea matematica a unui fenomen dinamic revine la stabilirea aces-
tor ecuatii, care sunt ın majoritatea cazurilor ecuatii diferentiale.
Definitie. Se numeste ecuatie diferentiala de ordinul I o ecuatie
de forma
F (x, y, y′) = 0 , (10.1)
87
88 10. ECUATII DIFERENTIALE
unde F : D ⊆ R3 −→ R este o functie, x ∈ I = (a, b) ⊆ R este variabila
independenta, y = y(x) ese functia necunoscuta, iar y′ = y′(x) este derivata
de ordinul I a functiei necunoscute.
Observatie. Relatia (10.1) se numeste forma generala(implicita) a
ecuatiei diferentiale.
Definitie. Daca ecuatia (10.1) se poate transcrie ın forma
y′ = f(x, y) , (10.2)
atunci aceasta se numeste forma explicita(sau normala) a ecuatiei
diferentiale.
Definitie. Se numeste solutie(sau integrala) a ecuatiei diferentiale
(10.1) sau (10.2) o functie y = y(x), y : I ⊆ R −→ R, derivabila pe I
pentru care
F (x, y(x), y′(x)) = 0 , (∀)x ∈ I .
Definitie. Se numeste solutie generala(sau integrala generala) a
ecuatiei diferentiale (10.1) o familie de functii {φ(x;C)|C ∈ R} pentru care
F (x, φ(x;C), φ′(x;C)) = 0 , (∀)x ∈ I, C ∈ R .
Definitie. Se numeste solutie particulara a ecuatiei diferentiale (10.1)
o functie y = φ1(x) care se obtine din solutia generala dand o valoare par-
ticulara constantei reale C.
Definitie. O solutie a ecuatiei diferentiale, care nu se poate obtine prin
particularizarea constantei dintr-o solutie generala, se numeste solutie sin-
gulara.
Observatie. A rezolva sau a integra o ecuatie diferentiala ınseamna deter-
minarea tuturor functiilor y = y(x) care verifica, pentru x dintr-o anumita
multime o relatie de forma (10.1).
Definitie. Graficul unei solutii y = y(x) a ecuatiei se numeste curba in-
tegrala a ecuatiei date.
Definitie. Prin problema Cauchy atasata unei ecuatii (10.1) se
ıntelege problema determinarii acelo solutii ale ecuatiei care verifica o egal-
itate de forma
y(x0) = y0 , (10.3)

10.2. ECUATII DIFERENTIALE DE ORDINUL I 89
unde x0 ∈ I, iar y0 ∈ R sunt fixate. Relatia (10.3) se numeste conditie
initiala.
Observatie. O problema Cauchy consta deci dintr-o ecuatie diferentiala si
o conditie initiala: y′ = f(x, y)
y(x0) = y0
(10.4)
Teorema. Fie ecuatia diferentiaa y′ = f(x, y), unde f : D ⊆ R −→ R,
(x0, y0) ∈ D. Daca f satisface conditiile
(i) f este continua pe D;
(ii) f admite derivata partiala ∂f∂y
continua pe D,
atunci exista un interval (x0−h, x0 +h) si o functie unica y = y(x) definita
pe acest interval, care sa fie solutie a problemei Cauchy.
Observatie. Din punct de vedere geometric, rezolvarea problemei Cauchy
revine la determinarea unei cubr integrale a ecuatiei care sa treaca prin
(x0, y0)
Observatie. Daca y = φ(x;C) este o solutie generala a ecuatiei diferentiale,
atunci problema Cauchy se poate rezolva daca exista C ∈ R cu proprietatea
ca y0 = φ(x0;C).
10.2 Ecuatii diferentiale de ordinul I
Primele ecuatii diferentiale de ordinul I au fost rezolvate ın secolul XVII,
odata cu aparitia calcului integral:
y′ = f(x) , x ∈ I , (10.5)
unde f : I ⊆ R −→ R este o functie continua. Solutia acestei ecuatii este
y(x) = y0 +∫ x
x0f(t) dt .
10.2.1 Ecuatii cu variabile separabile
Definitie. Se numeste ecuatie cu variabile separabile o ecuatie de
forma
y′ = f(x) · g(y) , (10.6)
unde f : (a, b) −→ R si g : (c, d) −→ R sunt functii continue, iar g nu se
anuleaza ın nici un punct din intervalul (c, d)(a, b, c, d,∈ R).

90 10. ECUATII DIFERENTIALE
Observatie. Functia g fiind continua si nenula, pastreaza semn constant
pe intervalul (c, d). Fara a restrange generalitatea, putem presupune ca
g > 0 pe (c, d)(ın caz contrar, ınlocuim f si g cu −f , respectiv −g). Fie
y = y(x), y : (a, b) −→ (c, d), o solutie a ecuatiei (10.6). Atunci putem
”separa variabilele”:
y′ = f(x) · g(y) ⇐⇒ y′(x)
g(y(x))= f(x) , (∀)x ∈ (a, b) .
Deoarece f este continua, f si fie F : (a, b) −→ R o primitiva a sa. De
asemenea, fie G : (c, d −→ R o primitiva a functiei 1g. Rezulta ca G′ = 1
g,
G ◦ y : (a, b) −→ R este derivabila si
(G ◦ y)′(x) = G′(y(x)) · y′(x) =1
g(y(x))· y′(x) = f(x) , (∀)x ∈ (a, b) ,
astfel ca (G ◦ y)′ = f . Dar atunci (G ◦ y)′ = F ′, astfel ca exista o constanta
reala C ∈ R cu proprietatea ca G ◦ y = F + C. Rezulta ca
y(x) = G−1(F (x) + C), (∀)x ∈ I ⊆ (a, b) . (10.7)
Reciproc, fie y = y(x) de forma (10.7). Atunci
y′(x) = (G−1(F (x) + C))′ = (G−1)′(F (x) + C) · (F (x) + C)′ =
= 1G′(G−1(F (x)+C))
· F ′(x) = 1G′(y(x))
· f(x) = f(x)
( 1g
)(y(x))=
= f(x) · g(y(x)) ,
astfel ca y = y(x) este solutie a ecuatiei (10.6). Am demonstrat astfel
urmatoarea
Propozitie. Fie f : (a, b) −→ R si g : (c, d) −→ R doua functii
continue cu g 6= 0 pe (c, d). Atunci ecuatia cu variabile separabile
y′ = f(x) · g(y)
are solutia generala
y = y(x) , y(x) = G−1(F (x) + C) , (∀)x ∈ I ⊆ (a, b) ,
unde F : (a, b) −→ R este o primitiva a functiei f , G : (c, d) −→ R este o
primitiva a functiei 1g, iar C ∈ R este o constanta reala.

10.2. ECUATII DIFERENTIALE DE ORDINUL I 91
Observatie. Cand avem de rezolvat o ecuatie diferentiala cu variabile
separabile, de forma y′ = f(x) · g(y), procedam astfel:
1) separam variabilele: y′(x)g(y(x))
= f(x).
2) integram si obtinem∫ dyg(y)
=∫f(x) dx, egalitate care este echivalenta cu
G ◦ y = F + C, C ∈ R.
3) Scriem solutia generala
y(x) = G−1(F (x) + C) , C ∈ R .
4) Daca avem date si conditii initiale, i.e. avem de rezolvat problema Cauchy y′ = f(x) · g(y)
y(x0) = y0
solutia se obtine considerand ın solutia generala C = G(y0) − F (x0), sau,
echivalent rezolvand ın raport cu y = y(x) ecuatia∫ y(x)
y0
dt
g(t)=∫ x
x0f(s) ds . (10.8)
Exemplu. 1) Sa consideram ecuatia y′ = 2x · (1 + y2). Pentru a o
rezolva, separam ın primul rand variabilele:
y′
1 + y2= 2x .
Prin integrare, avem ca ∫ dy
1 + y2=∫
2x dx ,
de unde, tinand cont de∫ dy
1 + y2= arctg(y) + C si
∫2x dx = x2 + C ,
obtinem ca
arctg(y(x)) = x2 + C , cu C ∈ R .
Solutia generala a ecuatiei date este atunci
y(x) = tg(x2 + C) , C ∈ R .
2) Sa consideram problema Cauchy y′ = 2x · yy(1) = 2

92 10. ECUATII DIFERENTIALE
Determinam solutia generala a ecuatiei diferentiale din cadrul sistemului:
y′ = 2x · y ⇐⇒ y′
y= 2x =⇒
∫ dyy
=∫
2x dx⇐⇒⇐⇒ ln(|y|) = x2 + C, C ∈ R⇐⇒ y = ±ex2+C , C ∈ R
⇐⇒ y = ±eC · ex2 , C ∈ R⇐⇒ y(x) = K · ex2 , K = ±eC ∈ R∗ .
Pentru a rezolva problema Cauchy, determinam constanta nenula K astfel
ıncat sa fie verificata conditia initiala y(1) = 2:
y(1) = 2⇐⇒ K · e12 = 2⇐⇒ K · e = 2⇐⇒ K =2
e.
Obtinem astfel solutia
y(x) =2
e· ex2 = 2ex
2−1 .
Observatie. Am fi putut rezolva problema Cauchy si direct, fara sa mai
scriem solutia generala a ecuatiei diferentiale, folosind egalitatea integralelor
definite: ∫ y(x)2
dtt
=∫ x
1 2s ds⇐⇒ ln(y(x))− ln(2) = x2 − 12 ⇐⇒⇐⇒ ln(y(x)) = ln(2) + x2 − 1⇐⇒ y(x) = eln(2)+x2−1 ⇐⇒⇐⇒ y(x) = 2ex
2−1 .
10.2.2 Ecuatii diferentiale omogene
Definitie. O ecuatie diferentiala se numeste ecua�zie diferentiala omogena
daca poate fi adusa la forma
y′ = f(y
x
). (10.9)
Pentru a rezolva ecuatia se considera functia auxiliara
z(x) =y(x)
x. (10.10)
Din relatia de mai sus obtinem succesiv:
y(x) = x · z(x) =⇒ y′(x) = z(x) + x · z′(x) .
Inlocuind ın relatia (10.9), tinand cont de (10.10), obtinem atunci ecuatia
z(x) + x · z′(x) = f(z(x)), sau, echivalent,
z′ =f(z)− z
x, (10.11)

10.2. ECUATII DIFERENTIALE DE ORDINUL I 93
care este o ecuatie cu variabile separabile. Rezolvand aceasta ecuatie se
gasesc solutiile z = z(x), care ne permit, cu ajutorul relatiei (10.10) sa
scriem solutiile ecuatiei omogene (10.9):
y = y(x) = x · z(x) .
Exemplu. Sa consideram ecuatia 2xyy′ = x2 + 3y2. Impartind ecuatia
prin x2 se ob�zine
2xyy′
x2= 1 + 3y2
x2⇐⇒ 2 y
x· y′ = 1 + 3
(yx
)2⇐⇒
⇐⇒ y′ =1+3( yx)
2
2 yx
,
care reprezinta o ecuatie diferentiala omogena. Cu notatia z(x) = y(x)x
obtinem ecuatia cu variabile separabile
z′ =1
x·(
1 + 3z2
2z− z
).
Pentru rezolvarea acesteia scriem succesiv:
2z·z′1+z2
= 1x
=⇒∫ 2z
1+z2dz =
∫ 1xdx⇐⇒
⇐⇒ ln(1 + z2) = ln(|x|) + C, C ∈ R⇐⇒ 1 + z2 = eln(|x|)+C , C ∈ R⇐⇒⇐⇒ z2 = ±x · eC − 1, C ∈ R⇐⇒ z = ±
√K · x− 1, K = ±eC ∈ R∗ .
Putem scrie atunci solutia ecuatiei initiale:
y(x) = ±√K · x− 1 , K ∈ R∗ .
Daca ın plus am avea si o conditie initiala, ca de exemplu y(1) = 2, deter-
minam constanta K ıncat sa fie verificata aceasta conditie:
±1 ·√K · 1− 1 = 2 =⇒
√K − 1 = 2⇐⇒ K − 1 = 4⇐⇒
⇐⇒ K = 5 .
Solutia problemei Cauchy este atunci
y(x) = x√
5x− 1 .
10.2.3 Ecuatii diferentiale liniare de ordinul I
Definitie. O ecuatie diferentiala de forma
y′ + P (x) · t = Q(x) , (10.12)

94 10. ECUATII DIFERENTIALE
ın care P,Q : I ⊆ R −→ R sunt doua functii continue, se numeste ecuatie
diferentiala liniara de ordinul I.
Observatie. Denumirea provine de la faptul ca atat functia necunoscuta
y, cat si derivata sa y′ apar numai la puterea ıntai.
Observatie. DacaQ(x) = 0, ecuatia se numeste ecuatie liniara omogena
de ordinul I, ın caz contrar ea numindu-se ecuatie liniara neomogena
de ordinul I.
Pentru rezolvarea ecuatiei (10.12) vom folosi metoda variatiei constan-
telor:
1) Vom determina solutia generala y = φ(x;C) a ecuatiei omogene y′ +
P (x) · y = 0, dupa care
2) Vom ınlocui constanta C cu o functie C(x), pe care o vom determina
ın asa fel ıncat functia y = φ(x;C(x)) sa fie solutie a ecuatiei neomogene
y′ + P (x) · y = Q(x).
Fie deci ecuatia omogena
y′ + P (x) · y = 0 .
Aceasta este o ecuatie cu variabile separabile, pentru care putem scrie suc-
cesiv:
y′ = −P (x) · y ⇐⇒ y′
y= −P (x) =⇒
∫ dyy
= −∫P (x) dx =⇒
=⇒ ln(|y|) = −∫P (x) dx+ C, C ∈ R⇐⇒
⇐⇒ y(x) = ±eC · e−∫P (x) dx, C ∈ R⇐⇒
⇐⇒ y(x) = K · e−∫P (x) dx, K = ±eC ∈ R∗
Pentru ecuatia neomogena cautam aum o solu�zie de forma
y(x) = K(x) · e−∫P (x) dx ,
prin ”varierea constantei” K. Pentru functia y de mai sus avem
y′(x) = K ′(x) · e−∫P (x) dx +K(x) · e−
∫P (x) dx · (−P (x)) .
Inlocuind ın ecuatia (10.12) obtinem
K ′(x) · e−∫P (x) dx +K(x) · e−
∫P (x) dx · (−P (x))+
+K(x) · e−∫P (x) dx · P (x) = Q(x)⇐⇒
⇐⇒ K ′(x) = Q(x) · e∫P (x) dx =⇒
=⇒ K(x) =∫Q(x) · e
∫P (x) dxdx+K1, K1 ∈ R .

10.2. ECUATII DIFERENTIALE DE ORDINUL I 95
Obtinem atunci solutia generala a ecuatiei (10.12):
y(x) =(∫
Q(x) · e∫P (x) dxdx+K1
)· e−
∫P (x) dx, K1 ∈ R .
Exemplu. Sa consideram problema Cauchy y′ + 2xy = x3
y(0) = e−12
Ecuatia diferentiala din cadrul problemei este una liniara de ordinul I, cu
P (x) = 2x si Q(x) = x3. Solutia sa generala va fi de forma
y(x) =(∫
x3 · e∫
2x dxdx+K)· e−
∫2x dx, K ∈ R .
Avem ∫2x dx = x2 + C
si
∫x3 · ex2dx = 1
2
∫x2 ·
(2x · ex2
)dx = 1
2
∫x2 ·
(ex
2)′dx =
12
(x2 · ex2 −
∫(x2)′ · ex2dx
)= 1
2(x2ex
2 − ex2) = 12· ex2(x2 − 1) ,
astfel ca
y(x) =(
1
2· ex2(x2 − 1) +K
)· e−x2 =
1
2(x2 − 1) +K · e−x2 , K ∈ R .
Dterminam acum constanta K ∈ R, astfel ıncat sa fie verificata conditia
initiala y(0) = e−12
:
1
2· (−1) +K · e0 =
e− 1
2⇐⇒ K =
e
2,
si solutia problemei Cauchy este
y(x) =1
2(x2 − 1) +
e
2· x−x2 =
1
2
(x2 − 1 + e1−x2
).
10.2.4 Ecuatii diferentiale de tip Bernoulli
Definitie. O ecuatie diferentiala de forma
y′ + P (x) · y = Q(x) · yα , (10.13)
ın care P,Q : I ⊆ R −→ R sunt doua functii continue, cu Q neidentic nula,
iar α ∈ R \ {0, 1}, se numeste ecuatie diferentiala de tip Bernoulli.

96 10. ECUATII DIFERENTIALE
Observatie. Valorile exceptate ale exponentului α corespund unor ecuatii
liniare de ordinul I(omogena pentru α = 1, respectiv neomogena pentru
α = 0).
Pentru rezolvarea ecuatiei (10.13), ımpartim ecuatia prin yα, obtinand
y′ · y−α + P (x) · y1−α = Q(x) ,
sau, echivalent,
(1− α)y′ · y−α + (1− α)P (x) · y1−α = (1− α)Q(x) ,
Considerm functia auxiliara z(x) = y(x)1−α, pentru care z′ = (1− α)y′y−α.
Inlocuind ın relatia de mai sus, avem ca
z′ + (1− α)P (x) · z = (1− α)Q(x) ,
care este o ecuatie liniara de ordinul I ın raport cu functia necunoscuta
z = z(x). Rezolvand aceasta ecuatie, din solutia sa z = z(x) putem obtine
o solutie y = y(x) = z(x)1
1−α a ecuatiei de tip Bernoulli initiale.
Exemplu. Sa consideram ecuatia diferentiala
y′ + 4xy = x√y .
Aceasta este o ecuatie de tip Bernoulli, ın care P (x) = 4x, Q(x) = x, iar
α = 12. Pentru z = z(x) = y(x)1−α =
√y(x) obtinem atunci ecuatia liniara
z′ + 2xz =x
2,
a carei solutie generala are forma
z(x) =(∫ x
2· e∫
2x dx +K)· e−
∫2x dx, K ∈ R .
Obtinem
z(x) =(
1
4· ex2 +K
)· e−x2 =
1
4+K · e−x2 .
Prin urmare,
y(x) = (z(x))1
1−α = (z(x))2 =(
1
4+K · e−x2
)2
, K ∈ R .
10.3. MODELE MATEMATICE ALE CRESTERII POPULATIEI 97
10.3 Modele matematice ale cresterii populatiei
Daca p(t) este populatia unei anumite specii dintr-un anumit areal la un
moment t, iar d(p, t) este diferenta dintre rata natalitatii si cea a mor-
talitatii, atunci ın ipoteza ca populatia este izolata(i.e. nu au loc emigrari
si imigrari), viteza de crestere a populatiei va fi
p′(t) = d(p, t) .
10.3.1 Modelul lui Malthus
Un model simplificat de crestere, propus de Malthus, presupune ca aceasta
viteza de crestere este proportionala cu p:
p′(t) = α · p(t) , cu α ∈ R, constant.
Considerand ca ıntr-un moment t0, populatia este p0, obtinem o problema
Cauchy: p′(t) = α · p(t)p(t0) = p0
Solutia acestei probleme se obtine separand variabilele t si p, si integrand:
p′(t)p(t)
= α =⇒∫ p(t)p0
dpp
=∫ tt0αds⇐⇒
⇐⇒ ln(p(t))− ln(p0) = α(t− t0)⇐⇒ ln(p(t)) = ln(p0) + α(t− t0)⇐⇒⇐⇒ p(t) = p0 · eα(t−t0) .
Ultima relatie reprezinta legea malthusiana de crestere a populatiei.
10.3.2 Modelul lui Verhulst
Un alt model, mai realist, a fost propus de biologul olandez Verhulst ın
1837. Modelul sau ia ın considerare si interactiunile dintre indivizii unei
specii(mai exact, efectul inhibitor al aglomerarii). El a considerat o ecuatie
de forma
p′(t) = α · p(t)− β · p2(t) ,
ın care α, β > 0 sunt constante, cu β foarte mica ın comparatie cu α.
Considerand ca la un moment t0, populatie este p0, se obtine problema
Cauchy p′(t) = α · p(t)− β · p2(t)
p(t0) = p0

98 10. ECUATII DIFERENTIALE
Ecuatia diferentiala din cadrul problemei,
p′ − α · p = −β · p2 ,
este o ecuatie Bernoulli cu coeficienti constanti P (t) = −α si Q(t) = −β, de
exponent e = 2. Trecand la functia auxiliara z = z(t), z = p1−e = p1−2 = 1p,
obtinem ecuatia liniara neomogena cu coeficienti constanti
z′ + (1− e)P (t) · z = (1− e)Q(t)⇐⇒ z′ + α · z = β ,
pentru care solutia generala este data de
z(t) =(∫β · e
∫α dtdt+K
)· e−
∫α dt = (
∫β · eαtdt+K) · e−αt =
=(βα· eαt +K
)· e−αt = β
α+K · e−αt .
Folosind conditia initiala p(t0) = p0, rezulta ca z(t0) = 1p0
, astfel ca
βα
+K · e−αt0 = 1p0
=⇒=⇒ K =
(1p0− β
α
)· eαt0 = 1
αp0· (α− βp0) · eαt0
Rezulta caz(t) = β
α+ 1
αp0· (α− βp0) · eαt0 · e−αt =
= 1αp0·(βp0 + (α− βp0) · e−α(t−t0)
)si obtinem legea lui Verhulst:
p(t) = 1z(t)
= αp0βp0+(α−βp0)·e−α(t−t0) =
= αp0·eα(t−t0)βp0·eα(t−t0)+(α−βp0)
Bibliografie
[1] Angel,A.R., Porter,S.R., A Survey of Mathematics with Applica-
tions, Addison-Wesley, New York, 1997
[2] Batschelet,E., Introduction to Mathematics for Life Scientists,
Springer Verlag, Berlin-Heidelberg-New York, 1971
[3] Cret,F., Elemente de Modelare si Matematici Speciale, Editura MIR-
TON, Timisoara, 2000
[4] Cret,F., Otiman,P., Elemente de Matematici aplicate ın economia
agroalimentara, Editura Agroprint, Timisoara, 2002
[5] Cret,F., Rujescu,C., Boldea,M., Rotariu,L., Ivan,M., Ele-
mente de Matematici Speciale, teorie si aplicatii, Editura MIRTON,
Timisoara, 2000
[6] M.Craioveanu, I.D.Albu Geometrie afina si euclidiana, Editura Fa-
cla, Timisoara, 1982.
[7] G.Chidiosan, D.Criveanu, Gh.David, M.Popa Culegere de
Probleme–Matematici si Cercetari operationale, Tipografia Univer-
sitatii din Timisoara, Timisoara, 1990.
[8] J.Curwin, R.Slater Quantitative Methods for Bussiness Decisions,
Chapmann & Hall, London, 1994.
[9] B.Demidovich Problems in Mathematical Analysis, Mir Publishers,
Moscow, 1976.
[10] D.K.Faddeev, I.S.Sominskii Culegere de probleme de algebra supe-
rioara, Editura Tehnica, Bucuresti, 1954.
99
100 BIBLIOGRAFIE
[11] D.Flondor, N.Donciu Algebra si Analiza matematica–culegere de
probleme, Editura didactica si pedagogica, Bucuresti, 1979.
[12] Garfunkel,S., Moore,D.S., Introduction to Contemporary Mathe-
matics, W.H.Freeman & Co, New York, 1988
[13] S.I.Grossman Multivariable Calculus, Linear Algebra, and Differen-
tial Equations, Harcourt Brace Jovanovich, 1986.
[14] Iaglom,A.M., Iaglom,I.M., Probleme nelementare tratate elemen-
tar, Editura Tehnica, Bucuresti, 1983
[15] Ion D.Ion, N.Radu Algebra, Editura didactica si pedagogica, Bu-
curesti, 1991.
[16] Gh.Ivan Initiere ın Algebra liniara, Tipografia Universitatii din
Timisoara, Timisoara, 1993.
[17] Mihoc, M. Matematici aplicate ın economie(Algebra liniara), Ti-
pografia Universitatii ”Babes–Bolyai” din Cluj–Napoca, Cluj–Napoca,
1995.
[18] Miller,C.D., Heeren,V.E., Hornsby,E.J., Mathematical Ideas,
Scott, Foresman & Co, London, 1990
[19] Muja,A., Diatcu,E., Matematica pentru economisti, Editura Victor,
Bucuresti, 1999
[20] M.Nicolescu, N.Diculeanu, S.Marcus Analiza Matematica, Edi-
tura didactica si pedagogica, Bucuresti, 1971.
[21] Orman,G.V., Capitole de matematici aplicate, Editura Albastra,
Cluj-Napoca, 1999
[22] I.P.Popescu Geometrie afina si euclidiana, Editura Facla, Timisoara,
1984.
[23] Popescu,O., Raischi,C., Badin,V., Butescu,V., Firica,O.,
Toma,M., Woinaroski,S., Matematici aplicate ın economie, Editura
Didactica si Pedagogica, Bucuresti, 1993
BIBLIOGRAFIE 101
[24] M.Postnikov Linear Algebra and Differential Geometry (”Lecture
Notes in Geometry”-Semester II), Editura Mir, Moscova, 1982.
[25] I.Purcaru Matematici generale si elemente de optimizare, Editura
Economica, Bucuresti, 1997.
[26] Pusztai,A., Ardelean,Gh., LATEX, Ghid de utilizare, Editura
tehnica, Bucuresti, 1994
[27] Rus,I.A., Iancu,C., Modelare matematica, Casa de editura TRAN-
SILVANIA PRESS, Cluj-Napoca, 2000
[28] Sabac,I.Gh., Matematici speciale, Editura Didactica si Pedagogica,
Bucuresti, 1965
[29] P.Stanciu, D.Criveanu, Gh.David, W.Fuchs Matematici aplicate
ın economie, Editura Facla, Timisoara, 1981.
[30] Tan,S.T., College Mathematics, for the managerial and social sci-
ences, Prindle, Weber & Schmidt, Boston, 1983
[31] A.Thuizat, G.Girault Algebre lineaire et applications, Collection
Durrande, Paris, 1977.
[32] C.Udriste, C.Radu, C.Dicu, O.Malancioiu Probleme de algebra,
geometrie si ecuati diferentiale, Editura didactica si pedagogica, Bu-
curesti, 1981.
[33] Vasiliu,D.P., Vasiliu,A.M.D., Metode cantitative ın probleme eco-
nomice, Editura ”Tribuna economica”, Bucuresti, 2000
[34] Vogel,A., Funktionentafeln und statistische Tabellen, Verlag Konrad
Wittwer, Stuttgart, 1979
[35] Waner,S., Costenoble,S.R., Finite Mathematics applied to the real
world, Harper Collins College Publishers, New York, 1996