algebra liniara si geometrie analitica
DESCRIPTION
Algebra pentru anul I , inginerie mecanicaTRANSCRIPT
UNIVERSITATEA TRANSILVANIA DIN BRAŞOV DEPARTAMENTUL PENTRU ÎNVĂŢĂMÂNT LA DISTANŢĂ ŞI ÎNVĂŢĂMÂNT CU FRECVENŢĂ REDUSĂ
Gheorghe ATANASIU
D.I.D.I.F.R.
ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI
GEOMETRIE DIFERENŢIALĂ
Curs pentru Învăţământ cu Frecvenţă Redusă
Facultatea:
INGINERIE MECANICĂ Program de studiu:
AUTOVEHICULE RUTIERE
ANUL I – Semestrul 1 2011-2012

Gheorghe ATANASIU
ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI
GEOMETRIE DIFERENŢIALĂ
ANUL I – Semestrul 1 2011-2012
i
Cuprins
Introducere……………………………………………………… .......................... ……………...1
Chestionar evaluare prerechizite .................................................................................................. . 4
MODULUL I ALGEBRĂ LINIARĂ.. ..................................................................................... . 5 Introducere ................................................................................................................................. 5
Competenţe ................................................................................................................................ 5
Unitatea de învăţare I.1. Spaţii vectoriale euclidiene .......................................................... 6 I.1.1. Introducere ....................................................................................................................... 6 I.1.2. Competenţe ...................................................................................................................... 6 II..11..33.. SSppaaţţiiii vveeccttoorriiaallee.. DDeeffiinniiţţiiee.. EExxeemmppllee .............................................................................................................................................................. 66 II..11..44.. CCoommbbiinnaaţţiiee lliinniiaarrăă.. SSiisstteemm ddee ggeenneerraattoorrii.. LLiinniiaarr ddeeppeennddeennţţăă şşii lliinniiaarr iinnddeeppeennddeennţţăă .............. 77 II..11..55.. BBaazzăă.. DDiimmeennssiiuunnee.......................................................................................................................................................................................................................... 99 II..11..66.. SScchhiimmbbaarreeaa bbaazzeeii...................................................................................................................................................................................................................... ..1100 II..11..77.. SSppaaţţiiii vveeccttoorriiaallee eeuucclliiddiieennee şşii uunniittaarree.......................................................................................................................................................... 1122 II..11..88.. OOrrttooggoonnaalliittaattee îînnttrr--uunn ssppaaţţiiuu vveeccttoorriiaall eeuucclliiddiiaann.. ...................................................................................................................... 1144 II..11..99.. Rezumat .................................................................................................................................................................................................................................................... 1155 I.1.10. Test de autoevaluare a cunoştinţelor ............................................................................ 15 I.1.11. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ..................................................... .15
Unitatea de învăţare I.2. Spaţiul vectorial euclidian al vectorilor liberi ......................... .16 I.2.1. Introducere ..................................................................................................................... 16 I.2.2. Competenţe .................................................................................................................... 16
II..22..33.. SSppaaţţiiuull vveeccttoorriiaall aall vveeccttoorriilloorr lliibbeerrii.. ............................................................................................................................................................ 1166 II..22..44.. CCoolliinniiaarriittaattee şşii ccooppllaannaarriittaattee...................................................................................................................................................................................... 2200 II..22..55.. PPrroodduussuull ssccaallaarr ............................................................................................................................................................................................................................ ..2211
II..22..66.. PPrroodduussuull vveeccttoorriiaall .................................................................................................................................................................................................................... 2244 II..22..77.. PPrroodduussuull mmiixxtt .................................................................................................................................................................................................................................. 2266 II..22..88.. DDuubblluull pprroodduuss vveeccttoorriiaall .................................................................................................................................................................................................... 2277 II..22..99.. Rezumat .......................................................................................................................... 28 I.2.10.Test de autoevaluare a cunoştinţelor ............................................................................. 28 II..22..1111..RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree .............................................................................................................. 2288
Unitatea de învăţare I.3. Translaţii şi rotaţii. Schimbări de repere în plan şi în spaţiu . 29 I.3.1. Introducere ..................................................................................................................... 29
I.3.2. Competenţe .................................................................................................................... 29 II..33..33.. Translaţia şi rotaţia reperului cartezian .................................................................................................................................................... 2299 II..33..44.. Trecerea de la reperul cartezian la reperul polar în plan ................................................................................................ 3322
II..33..55.. Trecerea de la reperul cartezian la reperul cilindric în spaţiu ................................................................................ 3333 II..33..66.. Trecerea de la reperul cartezian la reperul sferic în spaţiu.. ...................................................................................... 3344
II..33..77.. Rezumat .................................................................................................................................................................................................................................................... 3366 II..33..88.. Test de autoevaluare a cunoştinţelor ............................................................................................................................................................ 3366 II..33..99.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ........................................................ 36
Temă de control 1-Algebră liniară ............................................................................................... 37
ii
MODULUL II GEOMETRIE ANALITICĂ.............................. .............................................38 Introducere ............................................................................................................................... 38
Competenţe .............................................................................................................................. 38
Unitatea de învăţare II.1.Geometrie liniară în spaţiu (Planul şi dreapta în spaţiu) ......... 39 II.1.1. Introducere .................................................................................................................... 39
II.1.2. Competenţe ................................................................................................................... 39 IIII..11..33.. Ecuaţii de plane ............................................................................................................ 40
IIII..11..33..11.. PPllaannuull ddeetteerrmmiinnaatt ddee ttrreeii ppuunnccttee nneeccoolliinniiaarree ........................................................................................................ 4400 IIII..11..33..22.. PPllaannuull ddeetteerrmmiinnaatt ddee oo ddrreeaappttăă şşii uunn ppuunncctt eexxtteerriioorr ddrreepptteeii.. ........................................................ 4411 IIII..11..33..33.. PPllaannuull ddeetteerrmmiinnaatt ddee uunn ppuunncctt şşii ddoouuăă ddiirreeccţţiiii nneeccoolliinniiaarree ............................................................ 4411 IIII..11..33..44.. PPllaannuull ddeetteerrmmiinnaatt ddee ppuunncctt şşii ddee uunn vveeccttoorr nnoorrmmaall .................................................................................. ..4422 IIII..11..33..55.. EEccuuaaţţiiaa ggeenneerraallăă aa ppllaannuulluuii ............................................................................................................................................................ ..4422
IIII..11..33..66.. EEccuuaaţţiiaa ppllaannuulluuii pprriinn ttăăiieettuurrii ........................................................................................................................................................ 4422 IIII..11..44.. FFaasscciiccoollee ddee ppllaannee .................................................................................................................................................................................................................. 4433 IIII..11..55.. EEccuuaaţţiiii ddee ddrreeppttee ...................................................................................................................................................................................................................... 4444
IIII..11..55..11.. DDrreeaappttaa ddeetteerrmmiinnaattăă ddee ddoouuăă ppuunnccttee ................................................................................................................................ 4444 IIII..22..55..22.. DDrreeaappttaa ddeetteerrmmiinnaattăă ddee uunn ppuunncctt şşii uunn vveeccttoorr nneennuull.. .............................................................................. 4444 IIII..11..55..33.. DDrreeaappttaa ccaa iinntteerrsseeccţţiiee aa ddoouuăă ppllaannee .................................................................................................................................... 4455
IIII..11..66.. PPoozziiţţiiii rreellaattiivvee ddee ddrreeppttee şşii ppllaannee......................................................................................................................................................................4477 IIII..11..66..11.. PPoozziiţţiiaa uunneeii ddrreeppttee ffaaţţăă ddee uunn ppllaann ...................................................................................................................................... 4477 IIII..11..66..22.. PPoozziiţţiiiillee rreellaattiivvee aa ddoouuăă ddrreeppttee .................................................................................................................................................. 4477
IIII..11..77.. UUnngghhiiuurrii şşii ddiissttaannţţee îînn ssppaaţţiiuu ................................................................................................................................................................................ 4499 IIII..11..77..11.. UUnngghhiiuull ddiinnttrree ddoouuăă ppllaannee oorriieennttaattee .................................................................................................................................. 4499 IIII..11..77..22.. UUnngghhiiuull ddiinnttrree ddoouuăă ddrreeppttee oorriieennttaattee .............................................................................................................................. ..4499 IIII..11..77..33.. UUnngghhiiuull ddiinnttrree oo ddrreeaappttăă şşii uunn ppllaann .................................................................................................................................. ..5500 IIII..11..77..44.. DDiissttaannţţaa ddee llaa uunn ppuunncctt llaa uunn ppllaann ........................................................................................................................................ 5500 IIII..11..77..55.. DDiissttaannţţaa ddee llaa uunn ppuunncctt llaa oo ddrreeaappttăă .................................................................................................................................. 5500 IIII..11..77..66.. DDiissttaannţţaa ddiinnttrree ddoouuăă ddrreeppttee oorriieennttaattee ................................................................................................................................ 5500
II.1.8. Rezumat. ....................................................................................................................... 52 II.1.9. Test de autoevaluare a cunoştinţelor ............................................................................. 52 IIII..11..1100..RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ............................................................................................................ 5522
UUnniittaatteeaa ddee îînnvvăăţţaarree II.2.Geometrie pătratică în plan (Studiul conicelor pe ecuaţii generale) ...................................................................................................................................... 53 II.2.1. Introducere .................................................................................................................... 53
II.2.2. Competenţe ................................................................................................................... 53 IIII..22..33.. NNooţţiiuunnii ggeenneerraallee ...................................................................................................................................................................................................................... 5533 IIII..22..44.. CCeennttrruull uunneeii ccoonniiccee .............................................................................................................................................................................................................. 5555 IIII..22..55.. RReedduucceerreeaa llaa ffoorrmmaa ccaannoonniiccăă aa eeccuuaaţţiieeii uunneeii ccoonniiccee ........................................................................................................ 5577 IIII..22..66.. Rezumat ................................................................................................................................................................................................................................................ 6600
IIII..22..77.. Test de autoevaluare a cunoştinţelor .......................................................................................................................................................... 6600 IIII..22..88.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ....................................................... 60
Unitatea de învăţare II.3.Geometrie pătratică în spaţiu (Sfera. Cuadrice pe ecuaţii reduse) ......................................................................................................................................... 61 II.3.1. Introducere .................................................................................................................... 61
II.3.2. Competenţe ................................................................................................................... 61 IIII..33..33.. SSffeerraa ............................................................................................................................................................................................................................................................ 6622 IIII..33..33..11..EEccuuaaţţiiiillee ssffeerreeii ...................................................................................................................................................................................................... 6622 IIII..33..33..22.. IInntteerrsseeccţţiiaa uunneeii ssffeerree ccuu oo ddrreeaappttăă ........................................................................................................................................ 6633 IIII..33..33..33.. PPoozziiţţiiaa uunnuuii ppllaann ffaaţţăă ddee oo ssffeerrăă ................................................................................................................................................ 6644
iii
IIII..33..33..44.. PPuutteerreeaa uunnuuii ppuunncctt ffaaţţăă ddee oo ssffeerrăă .......................................................................................................................................... 6655 IIII..33..44.. EElliippssooiidduull ............................................................................................................................................................................................................................................ 6677 IIII..33..55.. HHiippeerrbboollooiidduull ccuu oo ppâânnzzăă ............................................................................................................................................................................................ 6688 IIII..33..66.. HHiippeerrbboollooiidduull ccuu ddoouuăă ppâânnzzee ................................................................................................................................................................................ 7700
IIII..33..77.. PPaarraabboollooiidduull eelliippttiicc .............................................................................................................................................................................................................. 7700 IIII..33..88.. PPaarraabboollooiidduull hhiippeerrbboolliicc .................................................................................................................................................................................................. 7711 II.3.9. Rezumat ................................................................................................................................................................................................................................................ 7722 IIII..33..1100.. Test de autoevaluare a cunoştinţelor ...................................................................................................................................................... 7722 IIII..33..1111.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ..................................................... 72
Unitatea de învăţare II.4.Generări de suprafeţe ................................................................. 73 II.4.1. Introducere .................................................................................................................... 73
II.4.2. Competenţe ................................................................................................................... 73 IIII..44..33.. SSuupprraaffeeţţee cciilliinnddrriiccee .............................................................................................................................................................................................................. 7744 IIII..44..44.. SSuupprraaffeeţţee ccoonniiccee ...................................................................................................................................................................................................................... 7755 IIII..44..55.. SSuupprraaffeeţţee ddee rroottaaţţiiee .............................................................................................................................................................................................................. 7766
IIII..44..66.. Rezumat ................................................................................................................................................................................................................................................ 7788 IIII..44..77.. Test de autoevaluare a cunoştinţelor .......................................................................................................................................................... 7788 IIII..44..88.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ....................................................... 78
Temă de control 2-Geometrie analitică ........................................................................................ 79
MODULUL III GEOMETRIE DIFERENŢIALĂ.............................. ....................................80 Introducere ............................................................................................................................... 80
Competenţe .............................................................................................................................. 80
Unitatea de învăţare III.1. Elemente de geometrie diferenţială a curbelor plane .......... 81 IIIIII..11..11.. IInnttrroodduucceerree .................................................................................................................................................................................................................................... 8811 IIIIII..11..22.. Competenţe .................................................................................................................. 81 IIIIII..11..33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa ccuurrbbeelloorr ppllaannee .......................................................................................................................................... 8822 IIIIII..11..44.. TTaannggeennttaa şşii nnoorrmmaallaa llaa oo ccuurrbbăă ppllaannăă îînnttrr--uunn ppuunncctt oorrddiinnaarr .............................................................................................. 8833 IIIIII..11..55.. Lungimea unui arc de curbă plană. Elementul de arc ......................................................... 85 IIIIII..11..66.. CCoonnttaaccttuull aa ddoouuăă ccuurrbbee ppllaannee .............................................................................................................................................................................................. 8866 IIIIII..11..77.. CCeerrccuull oossccuullaattoorr aall uunneeii ccuurrbbee ppllaannee ...................................................................................................................................................................... 8877 IIIIII..11..88.. PPuunnccttee mmuullttiippllee aallee uunneeii ccuurrbbee ppllaannee ........................................................................................................................................................................8888 IIIIII..11..99.. ÎÎnnffăăşşuurrăăttooaarreeaa uunneeii ffaammiilliiii ddee ccuurrbbee ppllaannee ......................................................................................................................................................9911 IIIIII..11..1100.. EEvvoolluuttaa ((ddeessffăăşşuurraattaa)) uunneeii ccuurrbbee ppllaannee ............................................................................................................................................................ 9922 IIIIII..11..1111.. CCuurrbbuurraa şşii rraazzaa ddee ccuurrbbuurrăă aa uunneeii ccuurrbbee ppllaannee ...................................................................................................................... 9933
III.1.12. Rezumat ..................................................................................................................... 95 IIIIII..11..1133..Test de autoevaluare ................................................................................................... 95 III.1.14. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ........................................................................................................ 9955
Unitatea de învăţare III.2. Elemente de geometrie diferenţială a curbelor în spaţiu ...... 96 III.2.1. Introducere ................................................................................................................ 96
III.2.2. Competenţe ................................................................................................................ 96 IIIIII..22..33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa ccuurrbbeelloorr îînn ssppaaţţiiuu .......................................................................................................................... 9966
IIIIII..22..44.. LLuunnggiimmeeaa uunnuuii aarrcc ddee ccuurrbbăă îînn ssppaaţţiiuu.. EElleemmeenntt ddee aarrcc ........................................................................................................ 9988 IIIIII..22..55.. Tangenta la o curbă în spaţiu……….. ............................................................................................................................................ 110000 IIIIII..22..66.. Planul normal la o curbă în spaţiu ................................................................................... 102 IIIIII..22..77.. Planul osculator la o curbă în spaţiu ....................................................................... 103
III.2.8. Normala principală la o curbă în spaţiu .......................................................................... 104 III.2.9. Binormala la o curbă în spaţiu ................................................................................ 106
iv
III.2.10. Planul rectificant llaa oo ccuurrbbăă îînn ssppaaţţiiuu ............................................................................................................................................................ 110077 IIIIII..22..1111.. TTrriieeddrruull lluuii FFrreenneett .......................................................................................................................................................................................................................... 110088 IIIIII..22..1122.. CCuurrbbuurrăă.. TToorrssiiuunnee.......................................................................................................................................................................................................................... ..110099 IIIIII..22..1133.. FFoorrmmuulleellee lluuii FFrreenneett .................................................................................................................................................................................................................... 111100 IIIIII..22..1144.. CCaallccuulluull ccuurrbbuurriiii şşii aall ttoorrssiiuunniiii .................................................................................................................................................................................. 111111 IIIIII..22..1155.. CCllaassee rreemmaarrccaabbiillee ddee ccuurrbbee îînn ssppaaţţiiuu .............................................................................................................................................. 111122 IIIIII..22..1166.. Rezumat ................................................................................................................... 114 IIIIII..22..1177.. Test de autoevaluare ................................................................................................ 114 III.2.18. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree .................................................................................................... 111144
Unitatea de învăţare III.3. Elemente de geometrie diferenţială a suprafeţelor .............. 115 III.3.1. Introducere ................................................................................................................ 115
III.3.2. Competenţe ................................................................................................................ 115 III.3.33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa uunneeii ssuupprraaffeeţţee ...................................................................................................................................... 111155 IIIIII..33..44.. CCuurrbbee ttrraassaattee ppee oo ssuupprraaffaaţţăă.. CCuurrbbee ccoooorrddoonnaattee ................................................................................................................................ 111177 IIIIII..33..55.. PPllaannuull ttaannggeenntt şşii nnoorrmmaallaa llaa oo ssuupprraaffaaţţăă .......................................................................................................................................................... 112200 IIIIII..33..66.. PPrriimmaa ffoorrmmăă ffuunnddaammeennttaallăă aa uunneeii ssuupprraaffeeţţee.. AApplliiccaaţţiiii aallee aacceesstteeiiaa .................................................................... 112233 IIIIII..33..77.. Rezumat ...................................................................................................................... 127 IIIIII..33..88.. Test de autoevaluare ................................................................................................... 127 III.3.9. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree .......................................................................................................... 112277
Temă de control 3-Geometrie diferenţială ................................................................................. 128
Bibliografie ............................................................................................................................ 129
1
Introducere Cursul de faţă se adresează studenţilor de anul I de la Facultatea de Inginerie Mecanică,
programul de studii: Autovehicule Rutiere, care se pregătesc să devină ingineri la forma de învăţământ IFR (Învăţământ cu frecvenţă redusă).
El reprezintă un ghid practic care include noţiunile, rezultatele teoretice de bază, precum şi tipurile de probleme care apar în cadrul disciplinei: ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE DIFERENŢIALĂ, disciplină care uneşte trei ramuri ale matematicii. Aceste ramuri constituie componente importante a pregătirii ştiinţifice a fiecărui student din învăţământul superior tehnic, prin numeroasele aplicaţii pe care le au, prin abilităţile de calcul pe care le dezvoltă şi prin numeroasele metode de modelare matematică pe care le propune.
Cunoştinţele prezentate în acest curs sunt fundamentale pentru pregătirea studenţilor, atât prin contribuţia adusă la definirea unei gândiri riguroase a fiecărui student, cât şi prin aceea că ele îşi găsesc în întregime aplicabilitate în practică.
Asimilarea problemelor teoretice, a exemplelor şi a exerciţiilor prezentate, permit studentului să redescopere funcţia modelatoare a matematicii şi să o exerseze în acest sens.
Cursul a fost scris astfel ca limbajul, noţiunile şi succesiunea unităţilor de învăţare să fie în concordanţă cu programa analitică de la forma de învăţământ zi, prezentând majoritatea lecţiilor necesare programului de studiu amintit.
Obiectivele cursului Obiectivul principal al acestui curs este de a-i iniţia pe studenţi în tainele a trei dintre ramurile de bază ale matematicii: algebră liniară, geometrie analitică şi geometrie diferenţială.
Competenţe conferite După parcurgerea şi asimilarea materialului studentul va fi capabil:
• să acumuleze şi să opereze cu cunoştinţele de bază din domeniul algebrei liniare, geometriei analitice şi geometriei diferenţiale;
• să pună în practică cunoştinţele acumulate atât la disciplinele matematice cât şi la celelalte discipline de specialitate, utilizatoare ale noţiunilor;
• să-şi formeze o gândire logică, un limbaj matematic adecvat şi să-şi dezvolte capacitatea de analiză şi sinteză;
• să-şi formeze capacitatea de autoevaluare.
Resurse şi mijloace de lucru Deoarece acest curs este parcurs în anul I, vom insista mai mult asupra modului de utilizare eficientă a acestuia. Conţinuturile unităţilor de învăţare sunt întrerupte de diverse sarcini de lucru. Acestea sunt anunţate printr-o imagine sugestivă şi au titlul „TO DO:”. Este indicată rezolvarea cu consecvenţă a cerinţelor formulate în sarcinile de lucru, imediat după parcurgerea conţinuturilor tematice şi a exerciţiilor rezolvate, intitulate sugestiv „Exemple”. Fiecare unitate de învăţare conţine un test de autoevaluare care permite cititorului să verifice singur calitatea însuşirii cunoştinţelor studiate. În cazul apariţiei unor neclarităţi în legătură cu rezolvarea testelor de autoevaluare se pot folosi răspunsurile şi sugestiile de rezolvare ale acestora, care se află la sfârşitul fiecărui test de autoevaluare. Dacă neclarităţile persistă este indicat a se lua legătura cu tutorele, la una dintre întâlnirile prevăzute prin calendarul disciplinei. Parcurgerea unităţilor de învăţare necesită existenţa unor mijloace sau instrumente de
2
lucru, anume utilizarea unui calculator având acces la internet, respectiv a instrumentelor: calculator de buzunar, riglă, compas, echer, raportor şi creioane colorate
Structura cursului Materialul cursului este structurat în trei module: primul modul este destinat
studiului algebrei liniare, modulul II, geometriei analitice, iar în modulul III se studiază geometria diferenţială. Cursul cuprinde un număr total de zece unităţi de învăţare.
Modulul I cuprinde unităţile de învăţare: UI.I.1- Spaţii vectoriale euclidiene, UI.I.2- Spaţiul vectorial al vectorilor liberi, UI.I.3- Translaţii şi rotaţii. Schimbări de reper în plan şi în spaţiu.
Modulul II conţine patru unităţi de învăţare: UI.II.1- Geometrie liniară în spaţiu (Planul şi dreapta în spaţiu), UI.II.2- Geometrie pătratică în plan (Studiul conicelor pe ecuaţii generale), UI.II.3-Geometrie pătratică în spaţiu (Sfera. Cuadrice pe ecuaţii reduse), UI.II.4- Generări de suprafeţe.
Modulul III cuprinde trei unităţi de învăţare: UI.III.1- Elemente de geometrie diferenţială a curbelor plane, UI.III.2- Elemente de geometrie diferenţială a curbelor în spaţiu şi UI.III.3- Elemente de geometrie diferenţială a suprafeţelor.
Elementele constitutive ale fiecărui modul sunt: cuprinsul, introducerea, competenţele, unităţile de învăţare şi tema de control, care încheie modulul.
Tema de control 1- cuprinde exerciţii de bază din algebra liniară, tema de control 2-cuprinde aplicaţii de bază din geometria analitică, iar tema de control 3-din geometria diferenţială.
Cele trei teme de control, rezolvate, vor fi transmise tutorelui, scrise de mână şi îndosariate.
Rezultatele obţinute de către studenţi la temele de control, vor fi încărcate pe platforma e-learning a Universităţii “Transilvania” Braşov, până la o dată prestabilită.
Fiecare unitate de învăţare are ca elemente constitutive: titlul unităţii, cuprinsul unităţii, o introducere, competenţele unităţii de învăţare, durata medie de parcurgere a unităţii de învăţare, conţinutul unităţii de învăţare, rezumatul, testul de autoevaluare cu răspunsuri şi indicaţii.
Cerinţe preliminare Parcurgerea cursului presupune cunoaşterea noţiunilor şi rezultatelor de algebră şi analiză matematică din clasele a XI-a şi a XII-a, precum şi geometria claselor IX-XI, predate în liceu.
Discipline deservite
Alegerea temelor acestui curs şi însuşi modul de tratare al lor au scopul de investigaţie şi de calcul şi în: fizică, inginerie, economie, statistică, etc. Se pot enumera numeroase discipline din planul de învăţământ care se dezvoltă pe baza cunoştinţelor dobândite în cadrul disciplinei de faţă: fizică teoretică, mecanică, rezistenţa materialelor, mecanica fluidelor, organe de maşini, prelucrări mecanice, mecanisme, termotehnică, metoda elementelor finite, teoria elasticităţii şi plasticităţii, dinamica autovehicolelor, transporturi auto, etc.
3
Durata medie de studiu individual Parcurgerea de către studenţi a aspectelor teoretice şi ale exemplelor unităţilor de învăţare ale cursului intitulat: ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE DIFERENŢIALĂ se poate face în 3 ore pentru fiecare unitate.
Evaluarea Pentru disciplina ALGEBRĂ LINIARĂ, GEOMETRIE ANALITICĂ ŞI GEOMETRIE
DIFERENŢIALĂ, evaluarea are două componente: evaluarea continuă şi evaluarea finală. Evaluarea continuă va fi făcută pe baza temelor de control ( notate de tutore). Punctajul
propus pentru notarea fiecărei teme se află menţionat după enunţul subiectelor. Nota obţinută la fiecare temă de control, reprezintă câte 15 % din nota finală. Evaluarea finală pentru acest curs este examenul scris. Nota obţinută la examenul scris, reprezintă 55% din nota finală. NU EZITAŢI SĂ LUAŢI LEGĂTURA CU TUTORELE PENTRU A OBŢINE
ALTE INDICAŢII SAU PRECIZĂRI, SAU PENTRU A DEPĂŞI EVENTUALELE BLOCAJE ÎN ÎNVĂŢARE !
SPOR LA TREABĂ ŞI SUCCES!

4
Chestionar evaluare prerechizite
Revedeţi: matrice şi determinanţi; sisteme liniare de ecuaţii, dreapta în plan, conice pe ecuaţii reduse (elipsa, hiperbola, parabola) şi apoi rezolvaţi.
1. Fie matricile:
=
1101
A ,
−−
=2153
B . Să se calculeze A+B, AB, BA, A2.
2. Să se calculeze determinanţii: 180922
672
1 −−
=d şi 300523102
2
−=d .
3. Să se studieze dacă matricea A =
−
103012325
este inversabilă şi în caz afirmativ să se
determine inversa ei.
4. Să se rezolve sistemul de ecuaţii liniare:
=−=−
.0,12
21
21
xxxx
5. Să se rezolve sistemul de ecuaţii liniare:
=++−−=−+−
=++−
.653,123
,13
4321
4321
4321
xxxxxxxx
xxxx
6. Să se definească structurile algebrice de grup abelian şi de corp. 7. Determinaţi simetricul punctului A(2,3) faţă de dreapta (d) : x - 2y + 1 = 0, precum şi
distanţa de la A la dreapta (d).
8. Să se traseze graficul următoarelor conice:
(C1) 4x2 + 9y2 – 36 = 0, (C2) 4x2 + 9y2 – 36 = 0
9. Să se determine dreptele paralele cu dreapta (d) : y = x, tangente la cercul (c) : x2 + y2 -2x -2y = 0.
10. Desenaţi domeniile cuprinse între perechile de curbe, indicând coordonatele punctelor de intersecţie:
(a) y = x2 şi y = x (b) y = x2 şi x = y2
5
MMOODDUULLUULL II.. AAllggeebbrrăă lliinniiaarrăă
Cuprins Introducere ................................................................................................................................ 5 Competenţe ............................................................................................................................... 5
UUII II..11.. Spaţii vectoriale euclidiene .................................................................................................................................................................................... 66 UUII II..22.. Spaţiul vectorial euclidian al vectorilor liberi ................................................................................................................................................ ..1166 UUII II..33.. Translaţii şi rotaţii. Schimbări de repere în plan şi în spaţiu ....................................... 2299 Temă de control 1-Algebră liniară ........................................................................................... 37
Introducere
Algebra liniară dezvoltă, în primul rând, metode de lucru pentru geometria analitică. Prin algebra vectorilor liberi, ea descrie aplicaţii imediate pentru disciplinele tehnice care se predau viitorilor ingineri. O atenţie aparte se acordă schimbărilor de reper, deoarece un fenomen tehnic explicat într-un reper convenabil fixat, pentru o descriere avantajoasă, trebuie să fie independent de reper (invariant).
Competenţe După parcurgerea acestor trei unităţi de învăţare, studentul va putea: -să identifice spaţiile vectoriale euclidiene -să definească produsele de doi şi de trei vectori -să identifice aplicaţiile geometrice ca: lungimi de vectori, arii de paralelograme, volume de
paralelipipede, sau cazuri particulare (arii de triunghiuri, volume de tetraedre, etc.) ,-să scrie formulele de translaţie şi de rotaţie -să identifice reperele avantajoase de lucru şi să înregistreze invarinţii la schimbările de
reper.
6
Unitatea de învăţare I.1. Spaţii vectoriale euclidiene
Cuprins I.1.1. Introducere ....................................................................................................................... 6 I.1.2. Competenţe ...................................................................................................................... 6 II..11..33.. SSppaaţţiiii vveeccttoorriiaallee.. DDeeffiinniiţţiiee.. EExxeemmppllee .............................................................................................................................................................. 66 II..11..44.. CCoommbbiinnaaţţiiee lliinniiaarrăă.. SSiisstteemm ddee ggeenneerraattoorrii.. LLiinniiaarr ddeeppeennddeennţţăă şşii lliinniiaarr iinnddeeppeennddeennţţăă ............ 77 II..11..55.. BBaazzăă.. DDiimmeennssiiuunnee ........................................................................................................................................................................................................................ 99 II..11..66.. SScchhiimmbbaarreeaa bbaazzeeii .................................................................................................................................................................................................................... ..1100 II..11..77.. SSppaaţţiiii vveeccttoorriiaallee eeuucclliiddiieennee şşii uunniittaarree ........................................................................................................................................................ 1122 II..11..88.. OOrrttooggoonnaalliittaattee îînnttrr--uunn ssppaaţţiiuu vveeccttoorriiaall eeuucclliiddiiaann.. .................................................................................................................... 1144 II..11..99.. Rezumat .................................................................................................................................................................................................................................................. 1155 I.1.10. Test de autoevaluare a cunoştinţelor ............................................................................ 15 I.1.11. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ..................................................... .15
I.1.1. Introducere În cadrul acestei unităţi de învăţare se defineşte conceptul de K-spaţiu vectorial cu elementele sale reprezentative: bază, dimensiune, etc.
I.1.2. Competenţele unităţii de învăţare După parcurgerea materialului studentul va fi capabil:
-să definească şi să exemplifice noţiunea de spaţiu vectorial; -să definească liniar dependenţa sau liniar independenţa a unui sistem de vectori; -să reţină noţiunile de: bază şi dimensiune şi să opereze cu schimbări de baze; -să definească şi să aplice noţiunile de: produs scalar , spaţiu vectorial euclidian şi unitar; -să descrie conceptul de ortogonalitate.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
II..11..33.. SSppaaţţiiii vveeccttoorriiaallee.. DDeeffiinniiţţiiee.. EExxeemmppllee
Definiţia 1.Fie V o mulţime nevidă, ale cărei elemente se notează cu litere latine (a, b, x, y, z, u, v, w, ..., x1, x2, ...) şi se numesc vectori şi fie K un corp comutativ (câmp), ale cărui elemente se notează prin (k, l, ...) sau prin litere greceşti (α, β, γ, ...) şi se numesc scalari.
Un triplet (V, +, ⋅, K ), care constă dintr-o mulţime V de vectori, o lege de compoziţie internă pe V, „+” : V × V → V, (x, y) → x + y, numită adunarea vectorilor şi o lege de compoziţie externă pe V în raport cu K , „⋅” : K × V → V, (α, x) → α ⋅ x (sau (α, x) → αx), numită înmulţirea cu scalari, se numeşte spaţiu vectorial peste K , sau spaţiu liniar peste K , sau K -spaţiu vectorial (liniar), dacă:
I. Perechea (V, +) este un grup abelian. II. Înmulţirea cu scalari satisface următoarele patru axiome:
1. Oricare ar fi α ∈ K şi pentru orice x, y ∈ V rezultă α(x + y) = αx + αy. 2. Oricare ar fi α, β ∈ K şi pentru orice x ∈ V rezultă (α + β)x = αx + βx. 3. Oricare ar fi α, β ∈ K şi pentru orice x ∈ V rezultă (α ⋅ β)x = α(βx). 4. Oricare ar fi x ∈ V, dacă 1 este identitatea lui K , atunci 1 ⋅ x = x.
Elementul neutru în grupul (V, +) se notează 0 şi se numeşte vectorul nul al spaţiului vectorial, iar simetricul unui element x în grupul (V, +) se notează cu −x şi poartă denumirea de opusul vectorului x.

7
Când K este corpul R al numerelor reale, un K -spaţiu vectorial se numeşte spaţiu vectorial real, iar pentru K = C , un K -spaţiu vectorial se numeşte spaţiu vectorial complex.
Dacă nu există pericol de confuzie, se va nota un K -spaţiu vectorial (V, +, ⋅, K ) mai simplu, prin V/ K , sau şi mai simplu, prin V.
Exemple 1
1. V = {0}, care constă dintr-un singur vector (cel nul), este K -spaţiu vectorial, pentru orice câmp K şi se numeşte spaţiu vectorial nul.
2. Spaţii vectoriale aritmetice. Fie ( K , +, ⋅, K ) un câmp şi n ∈ N , iar nK = =××
−
orinKK ... ( ){ }nixxxxx in ,1,...,,, 21 =∈= K , pentru n ≥ 1 şi 0K = {0}, (0 -
elementul zero al lui K ). Dacă, pentru ∈== )...,,,( ,)...,,,( 2121 nn yyyyxxxx nK şi α ∈ K , se defineşte: I. )y ...,,( n11 ++=+ nxyxyx şi II. )...,,( 1 nxxx ααα = ,
atunci ( nK , +, ⋅, K ) este un K -spaţiu vectorial şi se numeşte spaţiul coordonatelor (sau spaţiul aritmetic). Pentru K = R şi n = 2 se obţine planul real, iar pentru n = 3 se obţine spaţiul real.
3. Spaţii vectoriale de matrice. Pentru un câmp ( nK , +, ⋅, K ) şi m, n ∈ *K , fie mulţimea matricelor de tip m × n (cu m linii şi n coloane), cu elemente din K ,
{ }naA ijnm ,1 j ,m1, i ,a )()( ij ==∈==× KKM .
Dacă, pentru A = (aij), B = (bij) ∈ )(n m K×M şi α ∈ K , se defineşte:
I. A + B = (aij + bij) şi II. α ⋅ A = (α ⋅ aij), atunci tripletul ( )KK , , ,)(n m ⋅+×M este un K -spaţiu vectorial, numit K -spaţiul vectorial al matricelor de tipul m × n.
Teorema 1. Într-un K -spaţiu vectorial, (V, +, ⋅, K ), au loc proprietăţile: 1. Oricare ar fi x ∈ V rezultă 0 ⋅ x = 0. 2. Oricare ar fi α ∈ K se obţine α ⋅ 0 = 0.
3. Oricare ar fi α ∈ K şi oricare ar fi x ∈ V rezultă (−α) ⋅ x = −(α ⋅ x) = α ⋅ (−x). 4. Din α ⋅ x = 0 se obţine α = 0 sau x = 0.
Pentru demonstraţie a se consulta [7]-pag.18. Verifică axiomele din definiţia 1 a spaţiului vectorial în cazul Exemple1-2.,
pentru n=3 (spaţiul real).
Să ne reamintim… Structura algebrică de spaţiu vectorial constă dintr-un grup aditiv comutativ V şi o operaţie de înmulţire externă definită pe K × V cu valori în V, care satisface patru axiome, unde K este un corp comutativ (câmp). Elementele spaţiului vectorial V se numesc vectori, iar cele ale câmpului K se numesc scalari.
II..11..44.. CCoommbbiinnaaţţiiee lliinniiaarrăă.. SSiisstteemm ddee ggeenneerraattoorrii.. LLiinniiaarr iinnddeeppeennddeennţţăă şşii lliinniiaarr ddeeppeennddeennţţăă
Fie V un K -spaţiu vectorial şi {xi}i∈I o familie de vectori din V, adică xi ∈ V, pentru orice i ∈ I (I - o mulţime de indici), iar {αi}i∈I o familie de scalari cu proprietatea că există numai un număr finit de indici i ∈ I cu proprietatea αi ≠ 0 - numită familie de suport finit.

8
Definiţia 2. Se numeşte combinaţie liniară a vectorilor xi relativ la familia de scalari {αi}i∈I, suma: ∑
∈⋅
Iiii xα .
Definiţia 3. O submulţime S = {x1, ..., xn}, S ⊂ V, se numeşte sistem finit de generatori pentru
spaţiul V, dacă oricare ar fi x ∈ V, există α1, α2, ..., αn ∈ K astfel încât: ∑=
=n
iii xx
1α (adică se
poate spune că x este o combinaţie liniară de vectorii submulţimii S). Un spaţiu vectorial se numeşte finit generat, dacă există un sistem finit de generatori al
său; în caz contrar, se numeşte infinit generat.
Definiţia 4. Fie V un K -spaţiu vectorial şi S = {xi}i ∈ I ⊂ V o familie de vectori din V. Mulţimea S se numeşte familie (mulţime) liniar independentă dacă pentru orice {αi}i ∈ I, αi ∈ K , din combinaţia liniară ∑
∈⋅
Iiii xα = 0 rezultă αi = 0, oricare ar fi i ∈ I (evident {αi}i∈ I este o familie
de suport finit). O familie (mulţime) S = {xi}i ∈ I ⊂ V care nu este liniar independentă, se numeşte liniar dependentă, adică există scalarii {αi}i ∈ I ⊂ K , nu toţi nuli, astfel încât ∑∈
⋅Ii
ii xα = 0.
Exemple 2 1. În R [X] familia B = {Xi} N∈i este liniar independentă.
2. În spaţiul aritmetic nK , sistemul B = {e1, ..., en} în care i
i )0...,,0,1,0...,,0,0(e = , este liniar independent.
3. În spaţiul )(n m K×M , mulţimea { }n1,jm1,iij E
===B , i
0......0......0....................
0......1......0....................
0......0......0
j
Eij →
↑
= ,
este liniar independentă.
Propoziţia 1. Orice submulţime a unui spaţiu vectorial, formată dintr-un singur vector este liniar independentă dacă şi numai dacă acel vector este diferit de vectorul nul.
2. Dacă S = {x1, …, xn} ⊂ V este o mulţime liniar dependentă, atunci există cel puţin un vector al lui S care poate fi exprimat printr-o combinaţie liniară de ceilalţi vectori ai lui S.
3. Fie S = {x1, …, xk}, xi ≠ 0, k1,i = o mulţime liniar dependentă. Atunci există xj, 2 ≤ j ≤
k, astfel încât: ,1
1∑−
=⋅=
j
iiij xx α αi ∈ K .
4. Orice submulţime a unei mulţimi liniar independente este liniar independentă. Pentru demonstraţie a se consulta definiţiile de mai sus.
Observaţia 1. Reciprocele propoziţiilor 2 şi 3 din propoziţia 1 sunt evidente.
Exemple 3 În spaţiul vectorial 3R se consideră vectorii:
x = (1, 2, 3), y = (2, 3, 1), z = (a+3, a+1, a+2), a ∈R .

9
Să se afle valorile parametrului a pentru care aceşti vectori sunt liniar dependenţi şi să se scrie relaţia de dependenţă liniară. Soluţie:
Pentru ca vectorii daţi să fie liniari dependenţi, trebuie să existe scalarii reali λ1, λ2, λ3 nu toţi nuli astfel încât să aibă loc relaţia:λ1x + λ2y + λ3z = 0, sau λ1(1, 2, 3) + λ2(2, 3, 1) + λ3(a+3, a+1, a+2) = (0, 0, 0). Se obţine sistemul liniar şi omogen:
( )( )( )
=+++=+++=+++
,023,0132
,032
321
321
321
λλλλλλλλλ
aa
acare are soluţii nebanale dacă determinantul său este nul:
)6(3213132321
+−=+++
aaaa
.Deci pentru a = −6 vectorii daţi sunt liniar dependenţi.
Pentru a afla relaţia de dependenţă liniară se înlocuieşte cu a = −6 în sistemul de mai
sus:
=−+=−+=−+
.043,0532
,032
321
321
321
λλλλλλλλλ
Se exprimă λ1, λ2 în funcţie de λ3 din primele două
ecuaţii:λ1 = λ3; λ2 = λ3; λ3 ≠ 0.Înlocuind în combinaţia liniară şi simplificând cu λ3 se obţine relaţia de dependenţă liniară:x + y + z = 0.
Stabileşte care dintre următoarele mulţimi de vectori sunt liniar dependente: i) S1 = {x1 = (−3, 1, 5), x2 = (6, −2, 15)}. ii) S2 = {x1 = (1, 2, 3), x2 = (2, 5, 7), x3 = (3, 7, 10)}. R: ii)
Să ne reamintim… O submulţime S a unui K - spaţiu vectorial V se numeşte liniar independentă dacă pentru orice combinaţie liniară (de vectori din S cu scalari din K ) nulă, rezultă scalarii nuli. În caz contrar, submulţimea S se numeşte liniar dependentă.
II..11..55.. BBaazzăă.. DDiimmeennssiiuunnee
Fie V un K -spaţiu vectorial şi B = {xi}i ∈ I ⊂ V o familie de vectori din V.
Definiţia 5.Mulţimea B se numeşte bază a spaţiului V dacă este o familie liniar independentă şi dacă este un sistem de generatori pentru V.
Teorema 2.(de existenţă) Fie V ≠{0} un K -spaţiu vectorial finit generat. Din orice sistem de generatori finit al lui V se poate construi o bază a sa.
Pentru demonstraţie a se consulta [7]-pag.27. Teorema 3. Fie V un K -spaţiu vectorial finit generat. Atunci: 1. (teorema completării) Orice mulţime liniar independentă dintr-un sistem de generatori poate fi completată cu vectori din sistemul de generatori până la o bază a lui V.
2. (lema schimbului) Dacă S este un sistem de generatori al lui V şi {y1, …, yr} este o mulţime liniar independentă de vectori din V, atunci:
i) r ≤ m şi ii) {y1, …, yr, xr+1, …, xm} este un sistem de generatori pentru V (după o eventuală renumerotare a vectorilor x1, …, xm).
Pentru demonstraţie a se consulta [7]-pag.29.
Teorema 4. Fie V ≠{0} un K -spaţiu vectorial finit generat. Toate bazele lui V sunt finite şi au acelaşi număr de elemente.

10
Această teoremă permite:
Definiţia 6. Se numeşte dimensiune a unui spaţiu vectorial finit generat V, numărul de vectori dintr-o bază a lui, notat: dimV. Spaţiul nul: {0} are dimensiunea zero. Un spaţiu vectorial de dimensiune finită se numeşte: spaţiu vectorial finit dimensional.
Observaţia 2. 1. Dacă există o bază a spaţiului cu o infinitate de vectori, atunci dimensiunea este ∞ şi spaţiul se numeşte infinit dimensional. 2. Spaţiile vectoriale finit dimensionale, de dimensiune n se mai notează Vn. Exemple 4
1. Fie nK spaţiul vectorial aritmetic. Vectorii e1 = (1, 0, 0, ..., 0), e2 = (0, 1, 0, ..., 0), ..., en = (0, 0, 0, ..., 1), determină o bază B = {e1, e2, …, en}. Pentru a demonstra că B este o mulţime liniar independentă relaţia α1e1 + α 2e 2 + ... + αnen = 0 este echivalentă cu α1 = α2 = ... = αn = 0. Pe de altă parte oricare ar fi x ∈ nK , rezultă x = (x1, x2, …, xn) = x1e1 + x 2e 2 + ... + xnen, deci B generează pe V.
2. Spaţiul vectorial K n [X] al tuturor polinoamelor de grad ≤n are dimensiunea n+1, o bază fiind B = {1, X1, X2, …, Xn}, numită bază canonică din K n [X]. Se observă că mulţimea B este liniar independentă: adică din α0 + α1X1 + α 2X2 + ... + + αnXn = 0 se obţine α0 = α1 = α2 = ... = αn = 0 şi orice polinom de grad ≤n este o combinaţie liniară finită de elemente din B .
3. Spaţiul vectorial )(n m K×M al matricelor dreptunghiulare are dimensiunea m ⋅ n. O bază este mulţimea B = {Eij, 1 ≤ i ≤ m, 1 ≤ j ≤ n}, Eij fiind matricea care are elementul 1 la intersecţia liniei i cu coloana j, celelalte elemente fiind nule.
Teorema 5. Fie V un K -spaţiu vectorial n-dimensional. Atunci B = {e1, e2, …, en} este o bază a sa
dacă şi numai dacă oricare ar fi x ∈ V, ,exxn
1iii∑
=⋅= cu xi ∈ K unici.
Pentru demonstraţie a se consulta [7]-pag.28.
Definiţia 7. Scalarii xi din ∑=
⋅=n
iii exx
1 se numesc coordonatele vectorului x în baza B .
În spaţiul vectorial 3R se consideră următoarele sisteme de vectori: B = {e1 = (1, 1, 0), e2 = (1, 0, 0), e3 = (1, 2, 3)}, B ’ = {e1’ = (1, 3, 3), e2’ = (2, 2, 3), e3’ = (6, 7, 9)}.Arată că mulţimile B şi B ’ sunt baze. R: B şi B ’ sunt liniar independente şi au câte 3 elemente.
Să ne reamintim… O submulţime B a unui K - spaţiu vectorial V se numeşte bază pentru V, dacă este liniar independentă şi generează pe V. Se numeşte dimensiune a unui spaţiu vectorial finit generat V, numărul de vectori dintr-o bază a lui, notaţie: dim V.
II..11..66.. SScchhiimmbbaarreeaa bbaazzeeii
Fie V un K -spaţiu vectorial n-dimensional, iar B = {e1, e2, …, en} şi B ’ = {e’1, e’2, …,
e’n} două baze ale lui V. Atunci pentru orice x ∈ V, se obţine ∑=
⋅=n
iii exx
1, unde xi ∈ K sunt

11
coordonatele lui x în baza B şi ∑=
⋅=n
jjj exx
1'' , unde x’j ∈ K sunt coordonatele lui x în baza
B ’ (xi, x’j sunt unice cf. teoremei 5).În plus, se pot exprima vectorii e’j, nj ,1= în baza B ,
adică: ,'1∑=
⋅=n
iiijj ese nj ,1= unde sij ∈ -K unici.
Definiţia 8.Matricea S = (sij) ∈ )(n KM , unic determinată, ce are ca elemente, puse pe coloane,
coordonatele sij din egalităţile ,'1∑=
⋅=n
iiijj ese nj ,1= , se numeşte matricea de trecere de la baza
B la baza B ', iar egalităţile ,'1∑=
⋅=n
iiijj ese nj ,1= se numesc relaţii de trecere.
Observaţia 3.Cum det S ≠ 0 (altfel ar rezulta că vectorii e’j sunt liniar dependenţi (absurd)) rezultă că matricea de trecere este nesingulară şi deci are inversa: S−1. Mai departe folosind relaţiile de trecere se obţine:
=⋅= ∑=
n
iii exx
1=⋅∑
=
n
jii ex
1'' =
⋅∑ ∑
= =
n
j
n
iiijj esx
1 1' ∑ ∑
= =⋅
⋅
n
ii
n
jjij xs
1 1e '
şi cum scrierea într-o bază este unică, rezultă:
∑=
⋅=n
jjiji xsx
1' , ni ,1= .
Aceste egalităţi exprimă legea de schimbare a coordonatelor unui vector la schimbarea bazelor.
Observaţia 4. Prin convenţie se notează: )(
x...xx
X 1
n
2
1
K×∈
= nM , )(
x'...x'x'
X' 1
n
2
1
K×∈
= nM ,
)(...
............
1
111
Kn
nnn
n
ss
ssS M∈
= , )(
e...ee
B 1
n
2
1
K×∈
= nM şi )(
e'...e'e'
B' 1
n
2
1
K×∈
= nM .
Atunci relaţiile de trecere se exprimă în forma matriceală: B’ = ST ⋅ B,
unde ST este transpusa matricei S, de trecere de la baza B la baza B ‘, iar legea de schimbare a coordonatelor unui vector la schimbarea bazelor se exprimă în forma matriceală: X = S ⋅ X’.
S-a obţinut astfel: Teorema 6. Fie V un -K spaţiu vectorial, dim K V = n < ∞, B şi B ’ baze fixate în V, S-matricea de trecere de la baza B la baza B ’. Dacă x ∈ V şi X este matricea coloană a coordonatelor lui x în baza B , iar X’ este matricea coloană a coordonatelor lui x în baza B ’, atunci X = S ⋅ X’.
Exemple 5 În spaţiul vectorial 3R se consideră următoarele sisteme de vectori:B = {e1
= (1, 1, 0), e2 = (1, 0, 0), e3 = (1, 2, 3)}, B ’ = {e1’ = (1, 3, 3), e2’ = (2, 2, 3), e3’ = (6, 7, 9)}. i) Să se găsească matricea de trecere de la B la B ’. ii) Să se găsească

12
expresia vectorului x = 2e1 + 5e2 + 7e3 în baza B ’.
Soluţie: i) Pentru a determina matricea de trecere se descompune e1’ după B , şi
anume: e1’ = s11e1 + s21e2 + s31e3, sau
==+
=++
,33,32
,1
31
3111
312111
sss
sss de unde
=−=
=
.1,1
,1
31
21
11
sss
Analog: e2’ = s12e1 + s22e2 + s32e3 de unde s12 = 0, s22 = 1, s32 = 1 e3’ = s13e1 + s23e2 + s33e3 de unde s13 =1, s23 = 2, s33 = 3.
Astfel că matricea de trecere este:
−=
311211101
S .
ii) Dacă X = T(2 5 7) (matrice coloană), atunci matricea coloană X’ conţinând componentele vectorului x în baza B ’ se obţine din ecuaţia matriceală X = SX’. Se
calculează:
−−−−−
=−
112325111
1S , deci X’ = S−1X, adică:
=
−−−−−
=210
752
112325111
'X . Astfel că x = 0e1’ + 1e2’ + 2e3’, în baza B ’.
Găseşte matricea de trecere de la baza:
B =
−=
−=
−=
010100000
,001000100
,000001010
321 EEE
la baza: B ' =
−−=
−−=
−−=
011100100
,010101010
,001001110
' 3'
2'
1 EEE
din spaţiul matricelor antisimetrice de ordin trei şi determină descompunerea matricei
−−−=032301
210A după baza B '. R:
=
110101011
S ; 3'
2'
1 2'3 EEEA −−= .
Să ne reamintim… Orice schimbare de bază într-un K - spaţiu vectorial V este guvernată de două ecuaţii matriceale: B’ = ST ⋅ B, care conduce la determinarea matricei S de trecere de la „baza veche” la „baza nouă” şi X = SX’ , care conduce la obţinerea legii de schimbare a coordonatelor unui vector la o schimbare a bazei.
II..11..77.. SSppaaţţiiii vveeccttoorriiaallee eeuucclliiddiieennee şşii uunniittaarree
Se adaugă la structura de spaţiu vectorial o nouă operaţie cu vectori, aceea de produs scalar, cu ajutorul căreia se pot defini lungimile vectorilor, unghiurile, ortogonalitatea a doi vectori, proiecţia unui vector pe un alt vector, etc.

13
Definiţia 9. Fie V un spaţiu vectorial complex ( C -spaţiu vectorial). Se numeşte produs scalar pe V, o aplicaţie: <, > : V × V → C , astfel încât:
1.Pentru orice x, y ∈ V implică xyyx ,, = , (α = conjugatul numărului complex α).
2.Oricare ar fi x1, x2, y ∈ V rezultă yxx ,21 + = yx ,1 + yx ,2 .
3.Oricare ar fi α ∈ C şi pentru orice x, y ∈ V se obţine yx,⋅α = yx,⋅α .
4.Pentru orice x ∈ V se obţine 0, ≥xx şi 0, =xx dacă şi numai dacă x = 0.
Numărul complex yx, se numeşte produsul scalar al vectorilor x şi y şi uzual se mai notează şi astfel: g(x, y), sau x ⋅ y, sau (x, y) etc.
Observaţia 9. 1. Condiţiile 2 şi 3 implică: Oricare ar fi α1, α2 ∈ K şi pentru orice x1, x2, y ∈ V rezultă: yxx ,2211 αα + = yx ,11 ⋅α + yx ,22 ⋅α .
2. Condiţiile 1, 2 şi 3 implică: yxyx ,, ⋅= αα şi
22112211 ,,, yxyxyyx ⋅+⋅=+ αααα .
Dacă se restrâng scalarii la corpul numerelor reale, 1 devine: 1’. Oricare ar fi x, y ∈ V rezultă xyyx ,, = .
Definiţia 10. Un spaţiu vectorial peste corpul K pe care s-a definit un produs scalar se numeşte: 1. Spaţiu vectorial euclidian, când K = R . 2. Spaţiu vectorial unitar, când K = C .
Exemple 6 Fie x = (x1, x2, …, xn) şi y = (y1, y2, …, yn) doi vectori oarecare din spaţiul vectorial real aritmetic nR . Aplicaţia definită prin:
<, > : nR × nR → R , )(..., 2211 yxyxyxyxyx nn ⋅=+++=
este un produs scalar pe nR . ( nR , <, >) este un spaţiu vectorial euclidian, iar produsul scalar definit mai sus se numeşte produs scalar uzual (canonic) în nR .
Definiţia 11. Se numeşte lungimea (sau norma) unui vector x ∈ V în spaţiul euclidian (V, <, >), numărul real pozitiv: xx,x = . Teorema 7. Dacă (V, <, >) este un spaţiu vectorial euclidian, atunci este satisfăcută inegalitatea lui Cauchy-Schwarz: yxyx ⋅≤, , oricare ar fi x, y ∈ V,
cu egalitate dacă şi numai dacă x şi y sunt liniar dependenţi ( α = modulul numărului α ∈ R sau α ∈ C - pentru spaţii unitare). Teorema 8. Fie (V, <, >) un spaţiu vectorial euclidian. Aplicaţia +→R V : definită prin
xxx ,= este o normă pe V, adică satisface relaţiile:
1. x > 0, oricare ar fi x ∈ V, x ≠ 0, 0 = 0.
2. x⋅α = α ⋅ x , pentru orice α ∈ R şi x ∈ V.
3. yx + ≤ x + y , oricare ar fi x, y ∈ V (inegalitatea triunghiului). Norma din această teoremă se numeşte normă euclidiană.
Pentru demonstraţie a se consulta [7]-pag.34-35.

14
Observaţia 5. Primele două proprietăţi ale normei asigură că orice element x din V poate fi scris în forma x = x ⋅ e, unde e = 1. Vectorul e cu proprietatea e = 1 se numeşte versor.
Evident, versorul asociat unui vector nenul este: xx
e ⋅=1 .
Observaţia 6. Pe submulţimea V-{0}, inegalitatea lui Cauchy-Schwarz, yxyx ⋅≤, , se
transcrie: 1,
1 ≤⋅
≤−yx
yx.
Această observaţie justifică următoarea definiţie:
Definiţia 12.1.Fie (V, <, >) un spaţiu vectorial euclidian şi x, y doi vectori nenuli din V.
Numărul α ∈ [0, π] definit de: yx
yx⋅
=,
cosα , se numeşte unghiul vectorilor x şi y.
2. Un spaţiu vectorial dotat cu o normă se numeşte spaţiu vectorial normat. 3. Un spaţiu vectorial normat în care norma provine dintr-un produs scalar se numeşte spaţiu prehilbertian.
În spaţiul 0]e ,1[C al funcţiilor continue pe intervalul [1, e] arată că =gf ,
∫ ⋅⋅=e
dxxgxfx1
)()()(ln este un produs scalar.
R: Verifică axiomele din definiţia produsului scalar .
Să ne reamintim… Se numşte produs scalar pe un spaţiu vectorial V, o aplicaţie < , > : V × V → K , ce verifică patru axiome : Un K - spaţiu vectorial pe care s-a definit un produs scalar se numeşte spaţiu vectorial euclidian când RK = şi spaţiu vectorial unitar când CK = .
I.1.8. Ortogonalitate într-un spaţiu vectorial euclidian
Ortogonalitatea este una dintre cele mai importante relaţii între vectorii unui spaţiu vectorial euclidian.
Definiţia 13. Fie (V, <, >) un spaţiu euclidian. Doi vectori din V se numesc ortogonali, dacă produsul lor scalar este nul. O submulţime S ⊂ V se numeşte ortogonală, dacă vectorii săi sunt ortogonali doi câte doi, adică 0, =yx , oricare ar fi x, y ∈ S, x ≠ y. O mulţime ortogonală se numeşte ortonormată, dacă fiecare element al său este de lungime (normă) egală cu unitatea.
Propoziţia 2. Fie (V, <, >) un spaţiu euclidian, dim V = n. 1. Orice mulţime ortogonală din V, formată din elemente nenule este liniar independentă. 2. Orice mulţime ortogonală din V, care conţine n elemente nenule este o bază a lui V.
Pentru demonstraţie a se consulta [7]-pag.38.
Pentru studiul spaţiilor vectoriale euclidiene se utilizează baze ortonormate. Conform definiţiei 13, baza B = {e1, e2, …, en} ⊂ V este ortonormată dacă:
≠=
==.,0,,1
,jidacăjidacă
ee ijji δ
Simbolul δij se numeşte simbolul lui Kronecker.
15
Să ne reamintim… Doi vectori dintr-un spaţiu vectorial euclidian se numesc ortogonali, dacă produsul lor scalar este nul. O submulţime a unui spaţiu vectorial euclidian se numeşte ortogonală, dacă vectorii săi sunt ortogonali doi câte doi şi ortonormată, dacă este ortogonală şi fiecare element al său are lungimea egală cu unitatea.
I.1.9. Rezumat În cadrul acestei unităţi de învăţare se prezintă noţiunea de K -spaţiu vectorial, una dintre cele mai importante structuri algebrice, utilizate atât în diferitele ramuri ale matematicii cât şi în disciplinele aplicate. Se definesc noţiunile de liniar independenţă şi liniar dependenţă a unui sistem de vectori. Submulţimile de vectori liniari independenţi şi liniar dependenţi permit definirea noţiunilor de bază şi de dimensiune ale unui K -spaţiu vectorial. Se prezintă de asemenea spaţiile vectoriale pe care s-a definit un produs scalar, ceea ce permite concretizarea noţiunilor de lungime a unui vector, unghi a doi vectori, ortogonalitate.
II..11..1100.. Test de autoevaluare a cunoştinţelor 1. Continuă definiţia : Fie V un K -spaţiu vectorial şi S = {xi}i ∈ I ⊂ V o familie de vectori din V. Mulţimea S se numeşte familie (mulţime) liniar independentă dacă… 2. Defineşte noţiunile de bază şi dimensiune într-un K –spaţiu vectorial. 3. Continuă definiţiile: i) Fie V un spaţiu vectorial complex ( C -spaţiu vectorial). Se numeşte produs scalar pe V, o aplicaţie…ii) Se numeşte lungimea (sau norma) unui vector x ∈ V în spaţiul euclidian (V, <, >)… 4. Defineşte noţiunile de: vectori ortogonali, mulţime ortogonală şi mulţime ortonormată. 5. Stabileşte care dintre următoarele mulţimi de vectori sunt liniar independente: i) S1 = {x1 = (−8, 1, 0), x2 = (6, −5, 1)}. ii) S2 = {x1 = (- 1, 5, 3), x2 = (- 2, - 5, 7), x3 = (1, 2, 10)}.
II..11..1111.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree
11.. RReevveezzii ddeeffiinniiţţiiaa 44.. 22.. RReevveezzii ddeeffiinniiţţiiiillee 55.. şşii 66.. 33.. ii)) RReevveezzii ddeeffiinniiţţiiaa 99.. iiii)) RReevveezzii ddeeffiinniiţţiiaa 1111.. 44.. RReevveezzii ddeeffiinniiţţiiaa 1133.. 55.. ii)) şşii iiii))..
16
Unitatea de învăţare I.2. Sppaaţţiiuull vveeccttoorriiaall eeuucclliiddiiaann aall vveeccttoorriilloorr lliibbeerrii
Cuprins I.2.1. Introducere ..................................................................................................................... 16 I.2.2. Competenţe .................................................................................................................... 16
II..22..33.. SSppaaţţiiuull vveeccttoorriiaall aall vveeccttoorriilloorr lliibbeerrii.. ............................................................................................................................................................ 1166 II..22..44.. CCoolliinniiaarriittaattee şşii ccooppllaannaarriittaattee .................................................................................................................................................................................... 2200 II..22..55.. PPrroodduussuull ssccaallaarr ............................................................................................................................................................................................................................ ..2211
II..22..66.. PPrroodduussuull vveeccttoorriiaall .................................................................................................................................................................................................................... 2244 II..22..77.. PPrroodduussuull mmiixxtt .................................................................................................................................................................................................................................. 2266 II..22..88.. DDuubblluull pprroodduuss vveeccttoorriiaall .................................................................................................................................................................................................... 2277 II..22..99.. Rezumat ......................................................................................................................... 28 I.2.10.Test de autoevaluare a cunoştinţelor ............................................................................. 28 II..22..1111..RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree .............................................................................................................. 2288
I.2.1. Introducere Se prezintă un exemplu remarcabil de R -spaţiu vectorial, anume, ssppaaţţiiuull vveeccttoorriiaall aall vveeccttoorriilloorr lliibbeerrii. Se studiază principalele proprietăţi geometrice referitoare la acesta, se înzestrează acest spaţiu cu o structură naturală de spaţiu euclidian,care permite măsurarea lungimii unui vector, precum şi a unghiului format de doi vectori liberi. Se definesc, pe acest spaţiu, produse de doi şi produse de trei vectori liberi, cu aplicaţii geometrice importante.
I.2.2. Competenţele unităţii de învăţare După parcurgerea materialului studentul va fi capabil:
-să reţină definiţiile produselor de vectori liberi,precum şi interpretările geometrice rezultate din aceste definiţii; -să utilizeze proprietăţile produsului scalar , ale produsului vectorial şi ale produsului mixt; -să deosebească metoda de rezolvare a exerciţiilor cu vectori liberi într-un reper ortonormat dat, de cea care se aplică atunci când nu este dat un reper; -să opereze cu vectori liberi şi să rezolve probleme care necesită lungimi de vectori, arii de paralelograme, volume de paralelipipede şi cazurile lor particulare.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
I.2.33.. SSppaaţţiiuull vveeccttoorriiaall aall vveeccttoorriilloorr lliibbeerrii
Fie 3E spaţiul tridimensional al geometriei elementare.
Definiţia 1. a. Pentru oricare două puncte A, B ∈ 3E se consideră segmentul orientat AB . Punctul A se numeşte originea, iar B se numeşte extremitatea segmentului orientat. Dacă originea şi extremitatea coincid, se obţine segmentul orientat nul.
b. Dreapta determinată de A şi B se numeşte dreaptă suport a segmentului orientat AB şi se notează AB. Această dreaptă este unic determinată dacă şi numai dacă A ≠ B (fig. 1); pentru segmentul orientat nul, dreapta suport este nedeterminată.

17
c. Două segmente orientate nenule AB şi CD au aceeaşi direcţie dacă dreptele lor suport sunt paralele sau coincid (fig. 2).
d. Un segment orientat nenul AB determină unic dreapta AB şi un sens de parcurs pe această dreaptă: sensul de la A către B.
e. Două segmente orientate nenule, care au aceeaşi direcţie, au acelaşi sens, dacă sensurile determinate pe dreapta suport comună coincid; în caz contrar, au sensuri opuse; dacă dreptele suport ale segmentelor orientate sunt paralele, atunci ele au acelaşi sens dacă extremităţile lor se află în acelaşi semiplan determinat de dreapta (d) ce uneşte originile celor două segmente orientate (fig. 3).
f. Se numeşte lungimea (norma, modulul) unui segment orientat AB , lungimea segmentului neorientat [AB], adică distanţa de la punctul A la punctul B şi se notează: AB , deci AB = d(A, B). Lungimea segmentului orientat nul este egală cu zero.
g. Două segmente orientate nenule se numesc echipolente dacă au aceeaşi direcţie, sens şi lungime, iar două segmente nule sunt considerate echipolente. Dacă AB este echipolent cu CD atunci se notează: AB ~ CD . Teorema 1. Relaţia de echipolenţă definită pe mulţimea segmentelor orientate este o relaţie de echivalenţă. Demonstraţie: Se verifică uşor că relaţia de echipolenţă este reflexivă, simetrică şi tranzitivă, deci este o relaţie de echivalenţă. Definiţia 2. Clasele de echivalenţă ale segmentelor orientate în raport cu relaţia de echipolenţă se numesc vectori liberi. Direcţia, sensul şi lungimea care coincid pentru segmentele echipolente ce definesc un vector liber, se numesc direcţia, sensul şi respectiv lungimea vectorului liber.
Vectorii liberi se notează cu litere mici supraliniate a , b , c , ..., iar în desen se reprezintă printr-unul dintre segmentele orientate echipolente ce reprezintă clasa lor. Din acest motiv vectorii liberi se notează şi prin AB , CD , ...
Definiţia 3. a. Un segment orientat care determină un vector liber (o clasă de echivalenţă), se spune că este un reprezentant al vectorului liber determinat şi se scrie: AB ∈ AB .
A B
AB AB
A B
C D
Fig. 1.
Fig. 2.
C D
A B
B
A D
C (d) Fig. 3.

18
b. Se defineşte lungimea (norma, modulul) unui vector liber a (sau AB ), ca fiind lungimea unui reprezentant al său, şi se notează această lungime prin: a sau AB .
Un vector liber de lungime unu se numeşte versor sau vector unitar. Vectorul liber de lungime zero se numeşte vector nul şi se notează: 0 , fiind reprezentat de
segmentul orientat AA, oricare ar fi A ∈ 3E ; direcţia şi sensul lui fiind nedeterminate. c. Doi vectori liberi a şi b sunt egali şi se scrie: a = b , dacă reprezentanţii lor sunt
echipolenţi. d. Vectorii liberi a şi b care au aceeaşi direcţie se numesc vectori coliniari, şi se scrie:
a ||b (fig. 4). Doi vectori coliniari de aceeaşi lungime, dar cu sensuri opuse se numesc vectori opuşi; se
notează opusul vectorului liber a prin: − a (fig. 5).
e. Trei vectori liberi se numesc coplanari dacă şi numai dacă admit reprezentanţi coplanari
(fig. 6).
În cele ce urmează se notează cu: 3V mulţimea tuturor vectorilor liberi din spaţiul 3E . Oricărui punct M ∈ 3E îi corespunde un vector şi numai unul r ∈ 3V de reprezentant
OM . Reciproc, oricărui vector liber r ∈ 3V , îi corespunde un unic punct M ∈ 3E , astfel încât
OM ∈ r . Vectorul liber r = OM se numeşte vectorul de poziţie al punctului M faţă de originea O.
Astfel, mulţimile 3E şi 3V sunt în corespondenţă biunivocă, bijecţia fiind unic determinată de fixarea originii O.
Mulţimea 3V a vectorilor liberi din spaţiul 3E se poate organiza ca un grup aditiv comutativ, definind adunarea acestora prin regula triunghiului (sau prin regula paralelogramului).
Definiţia 4. Fie a , b ∈ 3V doi vectori liberi şi O ∈ 3V un punct arbitrar fixat. Se consideră
punctele A, B ∈ 3E astfel încât OA ∈ a şi AB ∈ b . Vectorul liber c reprezentat de segmentul
orientat OB se numeşte suma vectorilor liberi a şi b şi se notează: bac += sau ABOAOB += (fig. 7). Fig. 7.
Vectorii liberi a , b şi bac += sunt vectori coplanari. Regula de determinare a sumei a doi vectori liberi, prezentată mai sus, se numeşte regula triunghiului.
Adunarea vectorilor liberi este o lege de compoziţie internă bine definită: vectorul liber bac += nu depinde de alegerea punctului O. Teorema 2. Adunarea vectorilor liberi are următoarele proprietăţi, care determină o structură de grup comutativ: ( 3V , +), pe mulţimea vectorilor liberi:
1. Asociativitatea: oricare ar fi a , b , c ∈ 3V , a + (b + c ) = ( a + b ) + c . 2. 0 este elementul neutru: există 0 ∈ 3V , astfel încât oricare ar fi a ∈ 3V , a + 0 = 0
+ a = a .
a
b bac +=
A
B
O
a
b
a
− a a
c
b
Fig. 4 Fig. 5. Fig. 6.
(π)
19
3. Simetricul lui a (opusul lui a ) este: −a , oricare ar fi a ∈ 3V , există −a ∈ 3V , astfel încât a + (− a ) = (− a ) + a = 0 .
4. Comutativitatea: oricare ar fi a , b ∈ 3V , a + b = b + a .
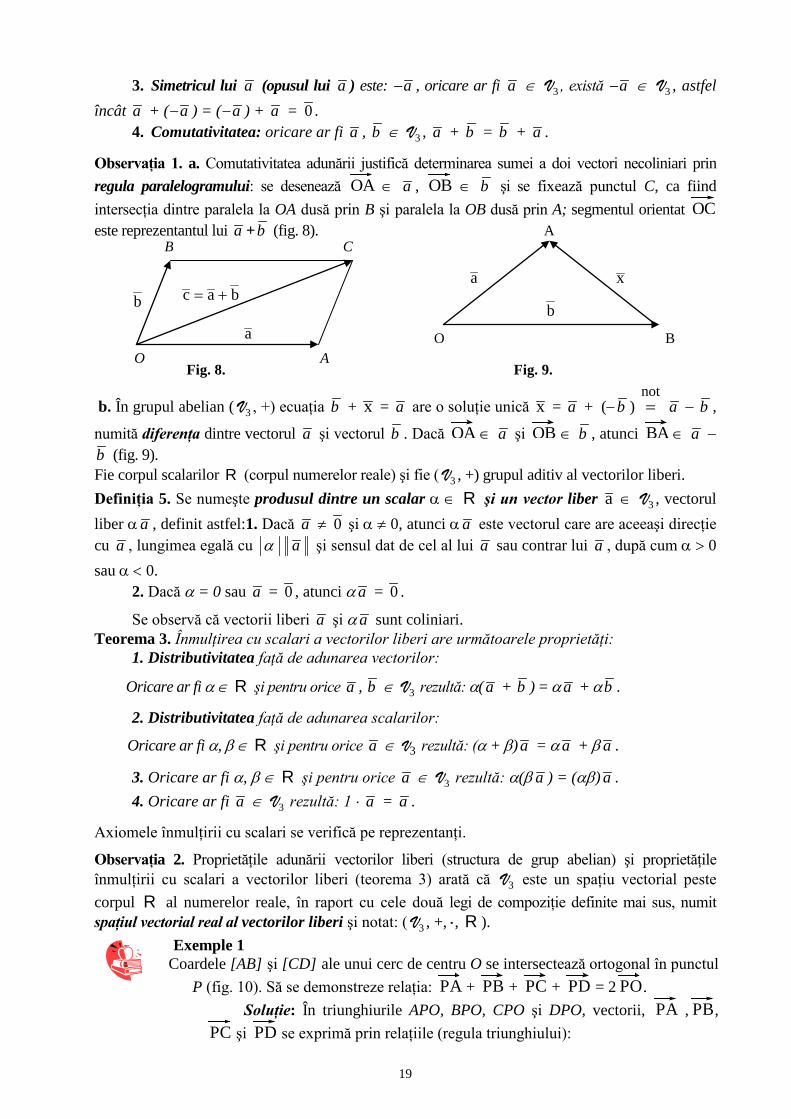
Observaţia 1. a. Comutativitatea adunării justifică determinarea sumei a doi vectori necoliniari prin regula paralelogramului: se desenează OA ∈ a , OB ∈ b şi se fixează punctul C, ca fiind intersecţia dintre paralela la OA dusă prin B şi paralela la OB dusă prin A; segmentul orientat OC este reprezentantul lui a +b (fig. 8).
b. În grupul abelian ( 3V , +) ecuaţia b + x = a are o soluţie unică x = a + (−b ) not= a − b ,
numită diferenţa dintre vectorul a şi vectorul b . Dacă OA ∈ a şi OB ∈ b , atunci BA ∈ a − b (fig. 9). Fie corpul scalarilor R (corpul numerelor reale) şi fie ( 3V , +) grupul aditiv al vectorilor liberi.
Definiţia 5. Se numeşte produsul dintre un scalar α ∈ R şi un vector liber a ∈ 3V , vectorul liber αa , definit astfel:1. Dacă a ≠ 0 şi α ≠ 0, atunci αa este vectorul care are aceeaşi direcţie cu a , lungimea egală cu aα şi sensul dat de cel al lui a sau contrar lui a , după cum α > 0 sau α < 0.
2. Dacă α = 0 sau a = 0 , atunci αa = 0 .
Se observă că vectorii liberi a şi αa sunt coliniari. Teorema 3. Înmulţirea cu scalari a vectorilor liberi are următoarele proprietăţi:
1. Distributivitatea faţă de adunarea vectorilor:
Oricare ar fi α ∈ R şi pentru orice a , b ∈ 3V rezultă: α(a + b ) = αa + αb .
2. Distributivitatea faţă de adunarea scalarilor:
Oricare ar fi α, β ∈ R şi pentru orice a ∈ 3V rezultă: (α + β)a = αa + β a .
3. Oricare ar fi α, β ∈ R şi pentru orice a ∈ 3V rezultă: α(β a ) = (αβ) a . 4. Oricare ar fi a ∈ 3V rezultă: 1 ⋅ a = a .
Axiomele înmulţirii cu scalari se verifică pe reprezentanţi.
Observaţia 2. Proprietăţile adunării vectorilor liberi (structura de grup abelian) şi proprietăţile înmulţirii cu scalari a vectorilor liberi (teorema 3) arată că 3V este un spaţiu vectorial peste corpul R al numerelor reale, în raport cu cele două legi de compoziţie definite mai sus, numit spaţiul vectorial real al vectorilor liberi şi notat: ( 3V , +, ⋅, R ). Exemple 1
Coardele [AB] şi [CD] ale unui cerc de centru O se intersectează ortogonal în punctul P (fig. 10). Să se demonstreze relaţia: PA + PB + PC + PD = 2 PO.
Soluţie: În triunghiurile APO, BPO, CPO şi DPO, vectorii, PA , PB, PC şi PD se exprimă prin relaţiile (regula triunghiului):
a
b bac +=
B C
O A
A
B O
a
b
x
Fig. 8. Fig. 9.
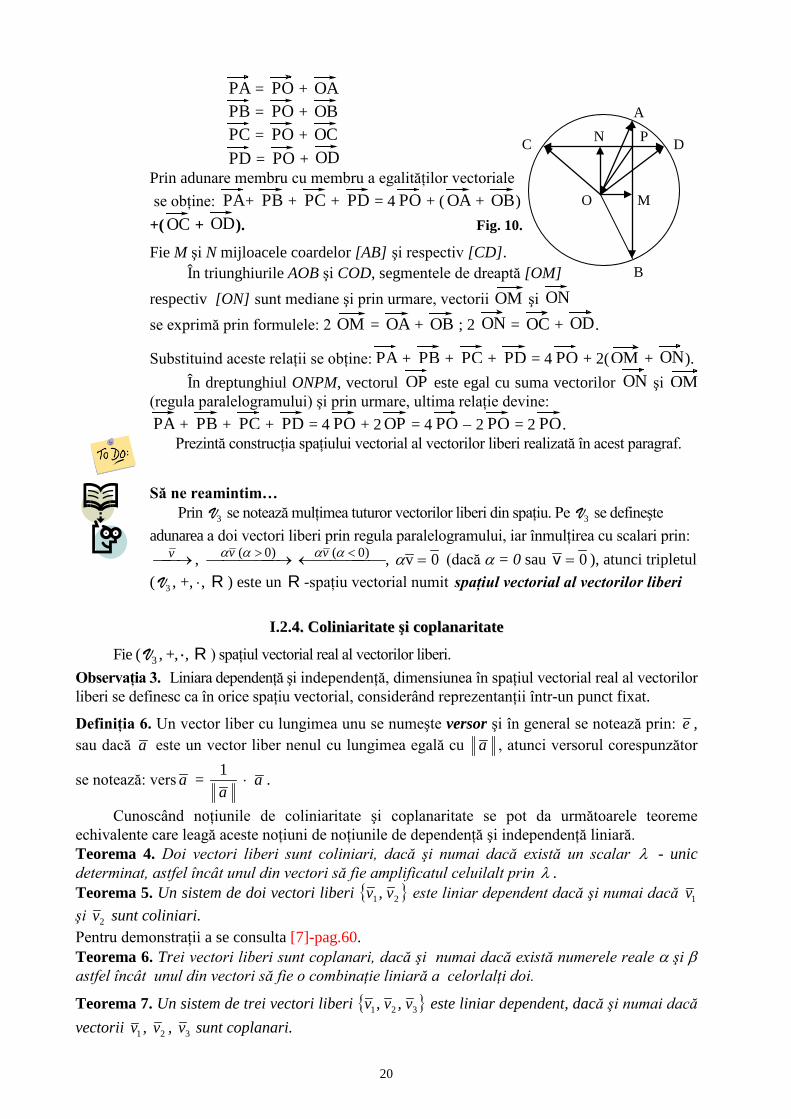
20
PA = PO + OA PB = PO + OB PC = PO + OC PD = PO + OD
Prin adunare membru cu membru a egalităţilor vectoriale se obţine: PA+ PB + PC + PD = 4 PO + ( OA + OB) +( OC + OD). Fig. 10.
Fie M şi N mijloacele coardelor [AB] şi respectiv [CD]. În triunghiurile AOB şi COD, segmentele de dreaptă [OM]
respectiv [ON] sunt mediane şi prin urmare, vectorii OM şi ON se exprimă prin formulele: 2 OM = OA + OB ; 2 ON = OC + OD.
Substituind aceste relaţii se obţine: PA + PB + PC + PD = 4 PO + 2(OM + ON). În dreptunghiul ONPM, vectorul OP este egal cu suma vectorilor ON şi OM
(regula paralelogramului) şi prin urmare, ultima relaţie devine: PA + PB + PC + PD = 4 PO + 2 OP = 4 PO − 2 PO = 2 PO.
Prezintă construcţia spaţiului vectorial al vectorilor liberi realizată în acest paragraf.
Să ne reamintim… Prin 3V se notează mulţimea tuturor vectorilor liberi din spaţiu. Pe 3V se defineşte adunarea a doi vectori liberi prin regula paralelogramului, iar înmulţirea cu scalari prin: →v , 0v , )0 ( )0 ( = ← → <> ααααα vv (dacă α = 0 sau 0=v ), atunci tripletul
( 3V , +, ⋅, R ) este un R -spaţiu vectorial numit spaţiul vectorial al vectorilor liberi
I.2.44.. CCoolliinniiaarriittaattee şşii ccooppllaannaarriittaattee
Fie ( 3V , +, ⋅, R ) spaţiul vectorial real al vectorilor liberi. Observaţia 3. Liniara dependenţă şi independenţă, dimensiunea în spaţiul vectorial real al vectorilor liberi se definesc ca în orice spaţiu vectorial, considerând reprezentanţii într-un punct fixat.
Definiţia 6. Un vector liber cu lungimea unu se numeşte versor şi în general se notează prin: e , sau dacă a este un vector liber nenul cu lungimea egală cu a , atunci versorul corespunzător
se notează: vers a = a1 ⋅ a .
Cunoscând noţiunile de coliniaritate şi coplanaritate se pot da următoarele teoreme echivalente care leagă aceste noţiuni de noţiunile de dependenţă şi independenţă liniară. Teorema 4. Doi vectori liberi sunt coliniari, dacă şi numai dacă există un scalar λ - unic determinat, astfel încât unul din vectori să fie amplificatul celuilalt prin λ . Teorema 5. Un sistem de doi vectori liberi { }21 , vv este liniar dependent dacă şi numai dacă 1v şi 2v sunt coliniari. Pentru demonstraţii a se consulta [7]-pag.60.
Teorema 6. Trei vectori liberi sunt coplanari, dacă şi numai dacă există numerele reale α şi β astfel încât unul din vectori să fie o combinaţie liniară a celorlalţi doi.
Teorema 7. Un sistem de trei vectori liberi { }321 ,, vvv este liniar dependent, dacă şi numai dacă vectorii 1v , 2v , 3v sunt coplanari.
C
O M
N P D
A
B

21
Teorema 8. (a) Pe dreaptă există sisteme de vectori liniar independenţi, fiecare sistem este format din cel mult un vector.
(b) În plan există sisteme de vectori liniar independenţi, fiecare sistem este format din cel mult doi vectori.
(c) În spaţiu există sisteme de vectori liniar independenţi, fiecare sistem este format din cel mult trei vectori. Pentru demonstraţii a se consulta [7]-pag.62-63.
Definiţia 7. a. Expresia v = λ1 1e + λ2 2e + λ3 3e , se numeşte descompunerea vectorului v după vectorii 1e , 2e , 3e .
b. Numerele reale λ1, λ2, λ3 se numesc coordonatele vectorului v în baza { }321 ,, eee . Consecinţa 1. 1. Deoarece dependenţa liniară a doi vectori liberi este echivalentă cu coliniaritatea rezultă că doi vectori liberi necoliniari sunt liniar independenţi.
2. Deoarece dependenţa liniară a trei vectori liberi este echivalentă cu coplanaritatea rezultă că trei vectori liberi necoplanari sunt liniar independenţi. Exemple 2
Să se determine α ∈ R pentru care vectorii nma += 2 şi nmb α+= sunt coliniari, în cazul în care vectorii m şi n sunt necoliniari.
Soluţie: Deoarece vectorii a şi b sunt coliniari rezultă că există scalarul β ∈ R astfel încât ba β= , adică: ( )nmnm αβ +=+2 , β ∈ R .Ordonând după m şi n se obţine: ( ) ( ) 012 =−+− nm βαβ .Deoarece vectorii m şi n sunt necoliniari, rezultă
că ei sunt liniari independenţi, aşadar:
=−=−
,01,02
βαβ
deci
=
=
.21,2
α
β
Se dau vectorii: pnma +−= 32 , pnmb 2−+= şi nmc += , în care vectorii m , n şi p , sunt necoplanari. Arată că vectorii cba ,, sunt liniar independenţi şi exprimă vectorul m în funcţie de aceştia.
R: Aplică definiţia unei mulţimi de vectori liniar independente; m = cba21
101
51
++ .
Să ne reamintim…
Versorul corespunzător unui vector liber a se notează: vers a = a1 ⋅ a .
Doi vectori liberi sunt coliniari, dacă şi numai dacă există un scalar λ - unic determinat, astfel încât unul din vectori să fie amplificatul celuilalt prin λ . Trei vectori liberi sunt coplanari, dacă şi numai dacă există numerele reale α şi β astfel încât unul din vectori să fie o combinaţie liniară a celorlalţi doi.
I.2.55.. PPrroodduussuull ssccaallaarr Se poate defini proiecţia ortogonală a unui vector liber a ∈ 3V pe o dreaptă, ca fiind
proiecţia ortogonală a unui reprezentant oarecare al vectorului pe acea dreaptă. Proiecţia ortogonală nu depinde de dreapta (d) (cele două proiecţii ortogonale fiind
segmente orientate echipolente). Se poate defini deci, proiecţia ortogonală a unui vector liber a pe un alt vector liber nenul b , care se notează a pr b .
Definiţia 8. Fie a , b ∈ 3V \ { 0 },O ∈ 3E şi reprezentanţii lor aleşi cu originea comună: OA ∈ a ,
OB ∈ b (fig. 11).Se numeşte unghiul dintre vectorii a şi b , numărul real ϕ ∈ [0, π], care

22
reprezintă măsura unghiului format de suporturile reprezentanţilor OA şi OB ai vectorilor a şi b . Se observă că definiţia unghiului format de vectorii liberi a şi b nu depinde de alegerea punctului O.
Definiţia 9. Dacă unghiul 2πϕ = , atunci vectorii liberi a şi b
se numesc vectori ortogonali. Prin convenţie se acceptă că vectorul nul 0 este ortogonal pe orice vector. Fig. 11. Definiţia 10. Fie a , b ∈ 3V \ { 0 }, ϕ ∈ [0, π] unghiul dintre ei (OA ∈ a , OB ∈ b ). Numărul real
a ⋅ cos ϕ se numeşte mărimea algebrică a proiecţiei ortogonale a vectorului a pe vectorul
b şi se notează a pr b .
Se obţine: a pr b = a cosϕ, OA’= a cosϕ= a pr b (fig.12). Fig. 12.
Teorema 9. Mărimea algebrică a proiecţiei ortogonale are proprietăţile:
1. Pentru orice a 1, a 2, b ∈ 3V \ { 0 } rezultă: bpr ( 1a + 2a ) = bpr 1a
+ bpr 2a .2. Oricare ar fi k şi pentru orice a 1, b ∈ 3V \ { 0 } rezultă: bpr (k ⋅ 1a ) = = k ⋅ bpr 1a .
Pentru demonstraţie a se consulta [7]-pag.70.
Definiţia 11. Fie a , b ∈ 3V , iar ϕ ∈ [0, π] în cazul: a ≠ 0 , b ≠ 0 , unghiul vectorilor a şi b . Aplicaţia „⋅” : 3V × 3V → R , care asociază perechii ( a , b ), numărul real notat: a ⋅ b definit
prin: a ⋅ b =
≠≠⋅⋅
nul, vectorulcu egalb,avectoriidintre unulputin celpentru0,
,0b,0apentru,cosba ϕ
se numeşte produsul scalar al vectorilor liberi a şi b . Observaţia 4. Din definiţia produsului scalar şi din definiţia mărimii algebrice a proiecţiei ortogonale se observă că: a ⋅ b = a ⋅ b pra = b ⋅ a pr b .
Din definiţia produsului scalar se observă că dacă a ≠ 0 , b ≠ 0 şi a ⋅ b = 0, rezultă că
vectorii liberi a şi b sunt ortogonali. Are loc şi reciproca acestei afirmaţii. Teorema 10. Produsul scalar al vectorilor liberi are următoarele proprietăţi:
1. Comutativitatea: Pentru orice a , b ∈ 3V rezultă: a ⋅ b = b ⋅ a . 2. Distributivitatea faţă de adunarea vectorilor:
Pentru orice a , b , c ∈ 3V rezultă: a (b + c ) = a ⋅ b + a ⋅ c . 3. Liniaritatea în raport cu amplificarea cu scalari reali:
Pentru orice λ ∈ R şi oricare ar fi a , b ∈ 3V , rezultă: λ ⋅ ( a ⋅ b ) = (λ ⋅ a ) ⋅ b = a ⋅ (λ ⋅ b ). 4. Pentru orice a ∈ 3V rezultă a ⋅ a ≥ 0, iar a ⋅ a = 0 dacă şi numai dacă a = 0 .
Pentru demonstraţie a se consulta [7]-pag.72.
Dacă se consideră un reper ortonormat R = {0, i , j , k }, un vector liber a ∈ 3V se
poate scrie a = ax i + ay j + az k , unde ax, ay, az sunt componentele acestui vector în reperul dat şi reprezintă proiecţiile vectorului pe axele reperului. Vectorul a se poate scrie astfel: a (ax, ay, az).
B
A O
ϕ a
b
A
B O
ϕ
a
b A’

23
Reperul R fiind ortonormat, rezultă: i = j = k = 1 şi i ⋅ j = j ⋅ k = k ⋅ i = 0. Teorema 11. Într-un reper ortonormat produsul scalar a doi vectori liberi este egal cu suma produselor componentelor lor. Pentru demonstraţie a se consulta [7]-pag.74.
Definiţia 12. a ⋅ b = axbx + ayby + azbz poartă numele de expresia analitică a produsului scalar într-un reper ortonormat.
CCoonnsseecciinnţţee aallee pprroodduussuulluuii ssccaallaarr
1. Norma unui vector
Dacă în a ⋅ b = a ⋅ b ⋅ cos ϕ se consideră b = a , rezultă a ⋅ a = a ⋅ a ⋅ cos 0° = 2a , deci: a = aa ⋅ .
Din expresia analitică a produsului scalar rezultă: a = 222zyx aaa ++ .
Dacă într-un reper ortonormat se consideră punctele M1(x1, y1, z1) şi M2(x2, y2, z2), atunci vectorul 21MM are componentele (x2 − x1, y2 − y1, z2 − z1) şi distanţa dintre punctele M1 şi M2
este: d(M1, M2) = 21MM = 212
212
212 )()()( zzyyxx −+−+− .
2. Unghiul dintre doi vectori
Din a ⋅ b = a ⋅ b ⋅ cos ϕ, rezultă: cos ϕ = ba
ba⋅⋅
,
care într-un reper ortonormat devine: cos ϕ = 222222zyxzyx
zzyyxx
bbbaaa
bababa
++⋅++
++.
3. Mărimea algebrică a proiecţiei ortogonale a unui vector pe alt vector
aprb = b
ba ⋅ = 222zyx
zzyyxx
bbb
bababa
++
++.
Exemple 3 Se dau vectorii: nma −= 2 , nmb += 3 , 1=m , 2=n .Se cere:
i) Lungimea diagonalelor paralelogramului construit pe suporturile reprezentanţilor vectorilor bşia aleşi cu originea comună (fig. 13).
ii) Unghiul dintre cele două diagonale, ştiind că unghiul dintre nşim este 3π
.
Soluţie: i) mbad 51 =+= , rezultă
51551 =⋅== md
nmbad 22 −−=−= , rezultă
( ) ( ) =−−⋅−−=⋅= nmnmddd 22222
( ) 212121424144 222 =⋅⋅⋅+⋅+=⋅++= nmnm .
1dba=+
2d
ba
=−
b
a1dba
=+1dba
=+
2d
ba
=−
2d
ba
=−
bb
aa
Fig. 13.

24
ii) cos ( ) ( ) ( )=
⋅−−=
−−⋅=
⋅
⋅=
215105
21525,
2
21
2121
nmmnmmdd
dddd
.213
215105 −
=−−
= Se obţine: ( )
−=
213arccos, 21 dd .
Se dau a , b şi c cu 1=a , 2=b , 3=c , ( )3
, π=ba ,
( )4
, π=ca , ( )
6, π
=cb . Calculează norma vectorului a + b − c .
R: 362316 −− .
Să ne reamintim… Fie a , b ∈ 3V , iar ϕ ∈ [0, π] în cazul: a ≠ 0 , b ≠ 0 , unghiul vectorilor a şi b . Aplicaţia „⋅” : 3V × 3V → R , care asociază perechii ( a , b ), numărul real notat:
a ⋅ b definit prin: a ⋅ b =
≠≠⋅⋅
nul, vectorulcu egalb,avectoriidintre unulputin celpentru0,
,0b,0apentru,cosba ϕ
se numeşte produsul scalar al vectorilor liberi a şi b . a ⋅ b = axbx + ayby + azbz poartă numele de expresia analitică a produsului scalar într-un reper ortonormat.
I.2.66.. PPrroodduussuull vveeccttoorriiaall
Definiţia 13. Se spune că un reper R = {0, 1e , 2e , 3e } este orientat drept (fig. 14) dacă orientarea lui 2e poate fi obţinută din orientarea lui 1e printr-o rotaţie în sens trigonometric, privită din extremitatea lui 3e , de un unghi mai mic de 180°, care suprapune direcţia lui 1e peste direcţia lui 2e .Un reper care nu este orientat drept poartă numele de reper stâng (fig. 15).
reper orientat drept reper stâng Definiţia 14. Fie 3V - spaţiul vectorial al vectorilor liberi. Se numeşte produs vectorial, aplicaţia „×” : 3V × 3V → 3V definită astfel: dacă a , b ∈ 3V şi ϕ ∈ [0, π] unghiul vectorilor a şi b în cazul a ≠ 0 , b ≠ 0 , vectorul a × b are: - direcţie perpendiculară pe direcţiile vectorilor a şi b ;
- sensul lui a × b este astfel încât reperul format într-un punct, de: a , b şi a × b să fie orientat drept;
- norma dată de: b×a = a ⋅ b ⋅ sin ϕ. Observaţia 5. Din definiţia produsului vectorial rezultă proprietatea de anticomutativitate a acestuia: a × b = −b × a .
1e
2e
3e 1e
2e
3e Fig. 14. Fig. 15.

25
Observaţia 6. b×a = a ⋅ b ⋅ sin ϕ reprezintă în unităţi pătratice, aria paralelogramului
construit pe suporturile reprezentanţilor vectorilor a şi b , aleşi cu originea comună. Observaţia 7. Fie a şi b doi vectori liberi şi OA ∈ a , OB ∈ b doi reprezentanţi cu originea comună în O şi (α) un plan perpendicular pe OA în O (fig. 16). Se consideră B' proiecţia ortogonală a lui B pe planul (α) şi OB'' = a ⋅ OB' . Rezultă că ║ OB''║ = a ⋅ b ⋅ sin ϕ.
Se face o rotaţie de unghi 2π în sens trigonometric, se
obţine OB''' , care este un reprezentant al vectorului Fig. 16. a × b în punctul O. Teorema 12. Produsul vectorial al vectorilor liberi are următoarele proprietăţi: 1. Distributivitatea faţă de adunarea vectorilor: Oricare ar fi a , b , c ∈ 3V rezultă: a × (b + c ) = a × b + a × c . 2. Liniaritatea în raport cu amplificarea cu scalari reali: Pentru orice α ∈ R şi oricare ar fi a , b ∈ 3V rezultă: (αa ) × b = a × (αb ) = α(a × b ).
Demonstrarea acestor proprietăţi se face folosind reprezentările geometrice ale vectorilor într-un punct O şi apoi construcţia de la observaţia 7.
Dacă se consideră un reper ortonormat R = {O, i , j , k } şi vectorii liberi a = ax i + ++ay j + az k şi b = bx i + by j + bz k se poate da următoarea teoremă:
Teorema 13. În reperul ortonormat R = {O, i , j , k }, vectorul a × b este dat de:
a × b = (aybz − azby) i − (axbz − azbx) j + (axby − aybx) k . Pentru demonstraţie a se consulta [7]-pag.78. Observaţia 8. Formula anterioară, numită expresia analitică a produsului vectorial într-un reper
ortonormat este echivalentă cu formula: a × b =
zyx
zyx
bbbaaakji
.
Exemple 4 Fie: kjirA 2+−= , krB = , kjirC ++= 2 , vectorii de poziţie ai vârfurilor unui triunghi ABC Să se determine: i)Aria triunghiului ABC .ii) Un vector v , perpendicular pe planul vectorilor AB şi ,AC având lungimea 142 . iii) Distanţa de la vârful A la latura BC a triunghiului.
Soluţie: i) kjirrAB AB −+−=−= , kjirrAC AC −+=−= 2
jirrBC BC +=−= 2 .
1421941
2132
21
121111
21
21
=++=−−=−−−=×=∆ kjikji
ACABAria ABC .
ii) Deoarece ABv ⊥ şi ACv ⊥ rezultă v coliniar cu )( ACAB× , deci există α ∈ R , astfel încât:
)32()( kjiACABv −−=×= αα , kjiv 32 −−⋅= α ,
A
B
B’ O
B’” B”
(α)
a b

26
adică 14142 ⋅= α , de unde |α| = 2, deci α = ±2. Atunci )32(2 kjiv −−±= .
iii) d(A, BC) = 5
1412
1422
=+
=∆
BC
Aria ABC .
Fie: kjirA ++= 2 , krB 5−= , kjirC −+= 3 , vectorii de poziţie ai vârfurilor unui triunghi ABC. Determină: i)Aria triunghiului ABC. ii)Distanţa de la vârful A la
latura BC a triunghiului. R: i) 2
15=∆ ABCAria ; ii) d(A, BC)
262615
= .
Să ne reamintim… • Fie 3V - spaţiul vectorial al vectorilor liberi. Se numeşte produs vectorial,
aplicaţia „×” : 3V × 3V → 3V ,dacă a , b ∈ 3V şi ϕ ∈ [0, π] unghiul vectorilor a şi b în cazul a ≠ 0 , b ≠ 0 , vectorul a × b are: i) direcţie perpendiculară pe direcţiile vectorilor a şi b ; ii) sensul lui a × b este astfel încât reperul format într-un punct, de: a , b şi a × b să fie orientat drept; iii) norma dată de: b×a =
a ⋅ b ⋅ sin ϕ.
• Expresia analitică a produsului vectorial
într-un reper ortonormat : a × b =
zyx
zyx
bbbaaakji
.
I.2.77.. PPrroodduussuull mmiixxtt
Definiţia 15. Se numeşte produs mixt a trei vectori liberi, scalarul obţinut din produsul scalar al unuia dintre vectori cu vectorul produs vectorial al celorlalţi doi.
Produsul mixt se notează: ( a , b , c ). Aşadar: ( a , b , c ) = a ⋅ (b × c ). Dacă se consideră un reper ortonormat R = {0, i , j , k } şi în acest reper vectorii: a (ax,
ay, az), b (bx, by, bz), c (cx, cy, cz), din expresia analitică a produsului vectorial a doi vectori
liberi, rezultă: a ⋅ ( b × c ) = ( a , b , c ) =
zyx
zyx
zyx
cccbbbaaa
,prezintă expresia analitică a
produsului mixt într-un reper ortonormat.
Consecinţa 2. Produsul mixt a trei vectori liberi este invariant la permutările circulare ale vectorilor, adică: ( a , b , c ) = ( c , a , b ) = (b , c , a ). Teorema 14. Valoarea absolută a produsului mixt a trei vectori liberi necoplanari, în unităţi cubice, reprezintă volumul paralelipipedului construit pe suporturile reprezentanţilor vectorilor consideraţi cu originea comună .
Pentru demonstraţie a se consulta [7]-pag.80.
Consecinţa 3. Volumul tetraedrului construit pe suporturile reprezentanţilor a trei vectori liberi
consideraţi cu originea comună este a şasea parte din volumul paralelipipedului, deci:
Vtetr. = 6ε ( a , b , c ), ε = ±1 astfel ca Vtetr. > 0.
Teorema 15. Produsul mixt a trei vectori liberi este nul dacă şi numai dacă: vectorii sunt coplanari, sau unul din vectori este vectorul nul, sau doi dintre vectori sunt coliniari.

27
Exemple 5 Fie: kjirA 2+−= , krB = , kjirC ++= 2 , vectorii de poziţie ai vârfurilor unui triunghi ABC. Să se determine un punct D în planul triunghiului ABC astfel încât Dr să fie perpendicular pe BC şi să aibă mărimea 4.
Soluţie: Fie D(x, y, z) ∈ (ABC). Rezultă că 0)AD ,AC ,( =AB .Cum BCrD ⊥ , se obţine 0=⋅ BCrD , unde kzjyixrD ++= , astfel încât Dr = 4. Se obţine sistemul:
=++
=+=+−−
,16,02
,0332
222 zyxyx
zyxcu soluţia S =
−−
−
713,
724,
712,
722,
718,
79 .Rezultă
aşadar două puncte D1,2 în planul (ABC), având coordonatele elementele mulţimii S.
Punctele A(1,-5,4), B(0,-3,1), C(-2,-4,3), D(4,4,-2) sunt vârfurile unui tetraedru.
Calculează înălţimea tetraedrului coborâtă din A. R: hA=3.
Să ne reamintim… • Se numeşte produs mixt a trei vectori liberi, scalarul obţinut din produsul scalar al unuia dintre vectori cu vectorul produs vectorial al celorlalţi doi. • Expresia analitică a produsului mixt într-un reper ortonormat:.
a ⋅ ( b × c ) = ( a , b , c ) =
zyx
zyx
zyx
cccbbbaaa
.
I.2.88.. DDuubblluull pprroodduuss vveeccttoorriiaall Definiţia 16. Se numeşte dublu produs vectorial al vectorilor liberi a , b , c , vectorul:
a × ( b × c ).
Teorema 16. Pentru orice trei vectori liberi, a , b , c ∈ 3V se obţine: dublul produs vectorial este
un vector coplanar cu vectorii b şi c şi cbabcacaba
cbcba ⋅⋅−⋅⋅=
⋅⋅=×× )()()( .
Demonstraţie, prin verificare directă.
Exemple 6
Să se calculeze valoarea expresiei: 2)()(
)(+
×⋅××
⋅⋅×
=cbacba
babaE , ştiind că vectorii
c,b,a ∈ 3V sunt necoplanari, iar vectorii a şi b sunt nenuli şi nu sunt ortogonali.
Soluţie: Ţinând cont de interpretarea produsului dublu vectorial se obţine: [ ]
[ ] =+×⋅⋅
⋅⋅−⋅⋅×= 2
)()(
)()()(
cbaba
cbabcabaE =+
⋅⋅−⋅ 2
),,()(),,()(),,()(
cbababacbababca
1212),,()(
),,()(0=+−=+
⋅⋅⋅⋅−
cbabacbaba .
Verifică egalitatea:
),,(),,()()(
cbab
accbbacbba
=×××
××× .

28
Să ne reamintim… • Se numeşte dublu produs vectorial al vectorilor liberi a , b , c , vectorul: a × ( b × c ). • Pentru orice trei vectori liberi, a , b , c ∈ 3V se obţine: dublul produs vectorial este
un vector coplanar cu vectorii b şi c şi caba
cbcba
⋅⋅=×× )( .
II..22..99.. Rezumat Această unitate de învăţare este dedicată însuşirii noţiunii de vector liber, operaţiilor elementare cu vectori liberi :adunarea şi înmulţirea dintre un scalar şi un vector liber, produselor de vectori liberi : scalar, vectorial, mixt, dublu produs vectorial, cât şi a consecinţelor geometrice aplicative: calculul lungimilor, unghiurilor, ariilor şi volumelor.
II..22..1100.. Test de autoevaluare a cunoştinţelor 1. Continuă enunţurile: i) Doi vectori liberi sunt coliniari, dacă şi numai dacă… ii) Trei vectori liberi sunt coplanari, dacă şi numai dacă… 2.Continuă definiţiile: i) Se numeşte produs scalar al vectorilor liberi a şi b …ii) Se numeşte produs vectorial al vectorilor liberi a şi b …iii) Se numeşte produs mixt al vectorilor liberi a , b şi c …iv) Se numeşte produs dublu vectorial al vectorilor liberi a , b şi c …. 3. i) Scrie expresia analitică a produsului scalar într-un reper ortonormat ii) Scrie expresia analitică a produsului vectorial într-un reper ortonormat. iii)Scrie expresia analitică a produsului mixt într-un reper ortonormat. 4. Scrie care este consecinţa geometrică aplicativă a produsului vectorial. 5. Scrie care este consecinţa geometrică aplicativă a produsului mixt. 6.Se dau vectorii .432 ,4123 ,3412 kjiOCkjiOBkjiOA −+=−+=+−= Arată că: triunghiul OAB este isoscel şi triunghiul AOC este dreptunghic. 7.Punctele A(4, -2, 2), B(3, 1, 1), C(4, 2, 0), D(1,0,0) sunt vârfurile unui tetraedru.Determină lungimea înălţimii tetraedrului DABC, duse din D pe baza ABC. 8.Calculează: ( )cbabaa +++ ,, .
II..22..1111.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ii)) RReevveezzii tteeoorreemmaa 44..iiii)) )) RReevveezzii tteeoorreemmaa 66..22.. ii)) RReevveezzii ddeeffiinniiţţiiaa 1111..iiii)) RReevveezzii ddeeffiinniiţţiiaa 1144.. iiiiii)) )) RReevveezzii ddeeffiinniiţţiiaa 1155.. iivv)) RReevveezzii ddeeffiinniiţţiiaa 1166.. 33.. ii)) RReevveezzii ddeeffiinniiţţiiaa 1122.. iiii)) RReevveezzii tteeoorreemmaa 1133.. şşii oobbsseerrvvaaţţiiaa 88.. iiiiii)) RReevveezzii rreellaaţţiiaa expresia analitică a produsului mixt într-un reper ortonormat ddiinn ppaarraaggrraaffuull 77.. 44..RReevveezzii oobbsseerrvvaaţţiiaa 66..55.. RReevveezzii tteeoorreemmaa 1144.. 66.. 13== OBOA ,deci triunghiul OAB este isoscel;
OA ⋅ OB =0,deci triunghiul AOC este dreptunghic.7.6
65=Dh .8. Aplică definiţia
produsului mixt. Vei obţine: ),,( cba .
29
Unitatea de învăţare I.3.TTrraannssllaaţţiiii şşii rroottaaţţiiii.. SScchhiimmbbăărrii ddee rreeppeerree în plan şi în spaţiu
Cuprins I.3.1. Introducere ..................................................................................................................... 29
I.3.2. Competenţe ..................................................................................................................... 29 II..33..33.. Translaţia şi rotaţia reperului cartezian .................................................................................................................................................... 2299 II..33..44.. Trecerea de la reperul cartezian la reperul polar în plan ................................................................................................ 3322
II..33..55.. Trecerea de la reperul cartezian la reperul cilindric în spaţiu .................................................................................. 3333 II..33..66.. Trecerea de la reperul cartezian la reperul sferic în spaţiu.. ........................................................................................ 3344
II..33..77.. Rezumat .................................................................................................................................................................................................................................................... 3366 II..33..88.. Test de autoevaluare a cunoştinţelor ............................................................................................................................................................ 3366 II..33..99.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ........................................................ 36
I.3.1. Introducere Translaţia şi rotaţia reperelor carteziene, se prezintă în această unitate de învăţare. Datorită utilizării lor în cadrul anumitor discipline de specialitate, se trec de asemenea în revistă rezultate referitoare la următoarele schimbări de repere în plan şi în spaţiu: trecerea de la reperul cartezian la cel polar (în plan), trecerea de la reperul cartezian la cel cilindric (în spaţiu), precum şi trecerea de la reperul cartezian la reperul sferic (în spaţiu).
I.3.2. Competenţele unităţii de învăţare După parcurgerea materialului studentul va fi capabil:
-să definească noţiunile de translaţie şi rotaţie ale reperului cartezian Oxyz. -să particularizeze translaţia şi rotaţia în plan şi în spaţiu; -să scrie şi să aplice în exerciţii formulele ce caracterizează o translaţie în spaţiu sau în plan, o rotaţie în spaţiu sau în plan, sau o roto-translaţie în plan; -să definească coordonatele polare, cilindrice şi sferice ale unui punct; să utilizeze în aplicaţii relaţiile dintre coordonatele carteziene şi cele polare, cilindrice sau sferice.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
II..33..33.. TTrraannssllaaţţiiaa şşii rroottaaţţiiaa rreeppeerruulluuii ccaarrtteezziiaann
Fie în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k }, de axe (Ox), (Oy) şi (Oz). Definiţia 1. Se numeşte translaţie a reperului cartezian (identificat cu sistemul de axe de coordonate pe care îl determină) R = Oxyz = {O, i , j , k } de vector liber v , deplasarea f = T a reperului R = Oxyz = {O, i , j , k } astfel ca axele noului reper R ' = O’x’y’z’ = {O’, i ’, j ’, k ’} să fie paralele şi de acelaşi sens cu cele ale reperului Oxyz, iar OO' ∈ v . Observaţia 1. Translaţia T de vector v , duce reperul R = Oxyz = {O, i , j , k } în reperul R ’ = O’x’y’z’ = {O’, i ’, j ’, k ’}, unde R ' =T (R ) = {O’ =T (O); i ’ =T ( i ), j ’ = T ( j ), k ’ = T ( k )} (fig. 1). Stabilim, în continuare, relaţiile între coordonatele (x, y, z) ale unui punct M raportat la reperul R şi coordonatele (x’, y’, z’) ale aceluiaşi punct raportat la reperul R ’.
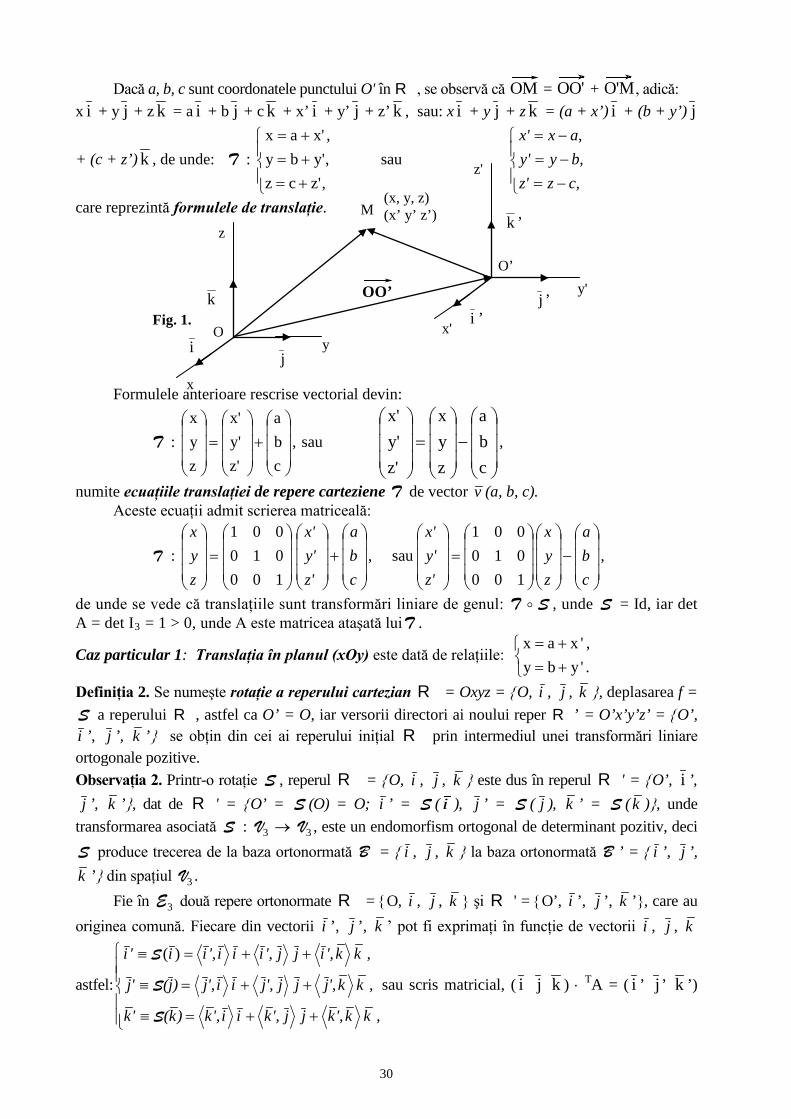
30
Dacă a, b, c sunt coordonatele punctului O' în R , se observă că OM = OO' + O'M, adică: x i + y j + z k = a i + b j + c k + x’ i + y’ j + z’ k , sau: x i + y j + z k = (a + x’) i + (b + y’) j
+ (c + z’) k , de unde: T :
+=+=+=
,z'cz,y'by, x'ax sau
−=−=−=
c,zz'b,yy'a,xx'
care reprezintă formulele de translaţie.
Fig. 1.
Formulele anterioare rescrise vectorial devin:
T :
+
=
cba
z'y'
x'
zyx
, sau
−
=
cba
zyx
z'y'x'
,
numite ecuaţiile translaţiei de repere carteziene T de vector v (a, b, c). Aceste ecuaţii admit scrierea matriceală:
T :
+
=
cba
z'y'x'
zyx
100010001
, sau
−
=
cba
zyx
z'y'x'
100010001
,
de unde se vede că translaţiile sunt transformări liniare de genul: T S , unde S = Id, iar det A = det I3 = 1 > 0, unde A este matricea ataşată luiT .
Caz particular 1: Translaţia în planul (xOy) este dată de relaţiile:
+=+=
.'yby,'xax
Definiţia 2. Se numeşte rotaţie a reperului cartezian R = Oxyz = {O, i , j , k }, deplasarea f = S a reperului R , astfel ca O’ = O, iar versorii directori ai noului reper R ’ = O’x’y’z’ = {O’, i ’, j ’, k ’} se obţin din cei ai reperului iniţial R prin intermediul unei transformări liniare ortogonale pozitive. Observaţia 2. Printr-o rotaţie S , reperul R = {O, i , j , k } este dus în reperul R ' = {O’, i ’, j ’, k ’}, dat de R ' = {O’ = S (O) = O; i ’ = S ( i ), j ’ = S ( j ), k ’ = S (k )}, unde
transformarea asociată S : 3V → 3V , este un endomorfism ortogonal de determinant pozitiv, deci S produce trecerea de la baza ortonormată B = { i , j , k } la baza ortonormată B ’ = { i ’, j ’, k ’} din spaţiul 3V .
Fie în 3E două repere ortonormate R = {O, i , j , k } şi R ' = {O’, i ’, j ’, k ’}, care au originea comună. Fiecare din vectorii i ’, j ’, k ’ pot fi exprimaţi în funcţie de vectorii i , j , k
astfel:
++=≡
++=≡
++=≡
,kk',kjj',kii',k)k('k
,kk',jjj',jii',j)j('j
,kk',ijj',iii',ii'i
)(
S
S
S
sau scris matricial, ( i j k ) ⋅ TA = ( i ’ j ’ k ’)
i j
k
O
i ’ j ’
k ’
O’
M (x, y, z) (x’ y’ z’)
OO’
z
x
y x'
y'
z'

31
unde:
=
k',kj',ki',kk',jj',ji',jk',ij',ii',i
A
este matricea transformării ortogonale a lui S , adică este
matricea de trecere de la baza { i , j , k } la baza { i ’, j ’, k ’}.Condiţia ca baza B ’ să fie ortonormată, asemeni bazei B , este echivalentă cu relaţiile A ⋅ TA = TA ⋅ A = I3, adică A−1 = TA, deci matricea A este o matrice ortogonală; deoarece S are determinant pozitiv, se obţine det A = 1. Rezultă că trecerea de la baza ortonormată { i , j , k }, la baza ortonormată { i ’, j ’, k ’} se face cu ajutorul matricei ortogonale A, iar trecerea inversă se face cu ajutorul matricei TA.
Pentru a stabili relaţia de legătură între coordonatele x, y, z, ale punctului M raportat la reperul R şi coordonatele x', y', z' ale aceluiaşi punct raportat la reperul R ’ (fig. 2), se observă că OM = OM sau xi + y j + z k = x’ i ’ + +.y’ j ’ + z’ k ’, de unde se poate scrie matriceal:
S :
⋅
=
z'y'x'
aaaaaaaaa
zyx
333231
232221
131211
, sau
S :
=
z'y'x'
Azyx
, unde A este matricea de trecere de la
baza B la bazaB ’.
Invers, se obţine:
z'y'x'
= TA
zyx
.
Caz particular 2 : Rotaţia în plan Fie reperul ortonormat R = {O, i , j } şi fie rotaţia de Fig. 3.
unghi θ a acestuia (fig. 3). Se observă că: ( i , i ’) = θ, ( i , j ’) = 900 + θ, ( i ’, j ) = 900 - θ, ( j , j ’) = θ.
Dacă se exprimă i ’ şi j ’ în funcţie de i şi j , rezultă: S :
+−=
+=
. θ cos jθsin i 'j, θsin jθ cos i 'i
Se obţine:
⋅
−
=
ji
θθθθ
'j'i
cos sin sin cos
, de unde:
⋅
−=
'j'i
θθθθ
ji
cos sin sin cos
,
deci o rotaţie în planul (xOy), de unghi θ în jurul originii are formulele date de:
S :
+=−=
. θ cos y'θ sin x'y, θ sin y'θ cos x'x
Din compunerea unei translaţii şi a unei rotaţii în plan, rezultă o roto-translaţie, caracterizată de
formulele: ST :
++=+−=
b,θ cos y'θ sin x'ya,θ sin y'θ cos x'x
unde a, b sunt coordonatele noii origini.
Exemple 1
1. Translatând reperul Oxy în O’(-1, 2) să se determine unghiul α cu care trebuie rotite noile axe (O’x’), (O’y’) pentru ca ecuaţia x2 + 2 xy + y2 – 2 x – 2 y + 1 = 0 să se transforme într-o ecuaţie de forma: aX2 + bY2 + c = 0.
i j
k
O
i ’
j ’ k ’
M (x, y, z) (x’ y’ z’)
θ
i
j
O
i ’ j ’
Fig. 2.

32
Soluţie: Folosind formulele de translaţie: x = x’ – 1, y = y’ + 2 se obţine: (x’ − 1)2 + 2(x’ − 1) (y’ + 2) + (y’ + 2)2 − 2(x’ − 1) − 2(y’ + 2) + 1 = 0,
de unde: x’2 + 2x’y’ + y’2 = 0.Efectuând rotaţia x’ = X cos α − Y sin α, y’ = X sin α + Y cos α, termenul x’y’ devine:x’y’ = X2 sin α cos α + XY cos2 α − XY sin2 α − Y2 sin α cos α, x’y’ = (X2 − Y2) sin α cos α + XY(cos2
α − sin2 α).Anulând coeficientul lui XY
se obţine: cos2 α − sin2 α = 0, sau cos 2α = 0, din care: 2
2 πα = deci 4πα = .
2. Se dă punctul ( )2,2 −M în planul (xOy). Să se determine unghiul cu care trebuie rotit reperul cartezian astfel ca: i) punctul M să aparţină axei (Ox’). ii) punctul M să aparţină axei (Oy’). Să se afle noile coordonate ale lui M în aceste condiţii.
Soluţie: i) Pentru y’ = 0, din formulele de rotaţie trebuie ca:
=−
=
,sin'2
,cos'2
α
α
x
x
de unde tg α = −1, rezultă 4
31
πα = , 4
72
πα = , deci M1(− 2, 0) şi respectiv M2(2, 0).
ii) Folosind formulele de rotaţie se obţine:
+=−
−=
.cos'sin'2
,sin'cos'2
αα
αα
yx
yxCum x’ = 0
rezultă:
=−
=−
,cos'2
,sin'2
α
α
y
yde unde tg α = 1, rezultă
41πα = ,
45
2πα = , deci M1(0, −
2) şi respectiv M2(0, 2). Ce devine relaţia dintre coordonatele carteziene (x, y) ale punctelor M:
3 x2 – 4 xy + 3 y2 – 2 x – 2 y + 1 = 0, faţă de sistemul de axe obţinut printr-o translaţie a sistemului (xOy) cu originea în O’(1, 1) şi apoi rotire în sens trigonometric cu un unghi
4πα = ? RR:: x’2 + 5y’2 – 1 = 0.
Să ne reamintim…
Translaţia în planul (xOy):
+=+=
.'yby,'xax Translaţia în spaţiu:
+=+=+=
z'.cz,y'by, x'ax
Rotaţia în planul (xOy), de unghi θ în jurul originii: S :
+=−=
. θ cos y'θ sin x'y, θ sin y'θ cos x'x
II..33..44.. TTrreecceerreeaa ddee llaa rreeppeerruull ccaarrtteezziiaann llaa rreeppeerruull ppoollaarr îînn ppllaann
Dacă se identifică spaţiul euclidian 2E cu planul (xOy), se defineşte reperul polar în 2E . Orice punct M(x, y) ∈ 2E \ {0} poate fi localizat prin cuplul ordonat (ρ, θ), unde:
- ρ este distanţa de la origine la punctul M; - θ este măsura unghiului dintre semidreptele [Ox şi
[OM (fig. 5). Definiţia 3. Numerele reale (ρ, θ) se numesc coordonatele polare ale punctului M în plan.
θ
O
M y
x
ρ y
x Fig. 5.

33
Relaţia dintre coordonatele polare şi cele carteziene este dată de următoarele formule de trecere de
la reperul cartezian la cel polar:
==
. θsin , θ cos x
ρρ
y
Observaţia 3. Dacă (ρ, θ) ∈ (0, ∞) × [0, 2π), atunci ecuaţiile de trecere de la reperul cartezian la cel polar, asigură o corespondenţă biunivocă: (ρ, θ) ∈ (0, ∞) × [0, 2π) → (x, y) ∈ 2E \ {0}, între mulţimile (0, ∞) × [0, 2π) şi mulţimea de puncte 2E \ {0}.
Transformarea inversă care asociază unui punct M de coordonate carteziene (x, y), coordonatele sale polare (ρ, θ): (x, y) ∈ 2E \ {0} → (ρ, θ) ∈ (0, ∞) × [0, 2π) este dată de relaţia:
22ρ yx += , cu unghiul θ dat de relaţiile:
+=
+=
.sin
,cos
22
22
yxy
yxx
θ
θ
Exemple 2 Se dau punctele în coordonate carteziene: A(2, 2 3 ), B(−3, 3 ). Să se afle
coordonatele polare ale acestor puncte. Soluţie: Se ştie că (x, y) fiind coordonatele carteziene ale unui punct M în plan, atunci din relaţiile de legătură cu coordonatele sale polare (ρ, θ) se obţine:
4)32(2 2222 =+=+= AA yxAρ ,
==+
=
==+
=
,23
1632sin
,21
162cos
22
22
AA
AA
AA
AA
yx
y
yx
x
θ
θ
de unde:
3πθ =A . Rezultă coordonatele polare ale lui A sunt: (4,
3π ). Analog se obţine:
B( 32 , 6
5π ).
Se dau punctele în coordonate polare: A(4, 3π ), B( 32 ,
65π ). Află coordonatele
carteziene ale acestor puncte. R: A(2, 2 3 ), B(−3, 3 ).
Să ne reamintim…
Formule de trecere de la reperul cartezian la cel polar:
==
θ,sin , θ cos x
ρρ
y
(ρ, θ) ∈ (0, ∞) × [0, 2π).
I.3.5.TTrreecceerreeaa ddee llaa rreeppeerruull ccaarrtteezziiaann llaa rreeppeerruull cciilliinnddrriicc îînn ssppaaţţiiuu
Fie spaţiul 3E raportat la un reper cartezian
ortonormat R = {O, i , j , k }, de axe (Ox), (Oy) şi (Oz). Orice punct M(x, y, z) ∈ 3E \ (Oz) este determinat de tripletul ordonat (ρ, θ, z), unde:
- ρ este distanţa de la origine la proiecţia ortogonală M’ a punctului M pe planul (xOy);
x
z
y O
y
z
x
z M
M’
ρ θ
Fig. 6.

34
- θ este măsura unghiului dintre semidreptele Ox şi [OM’ (fig. 6). Definiţia 4. Numerele reale (ρ, θ, z) se numesc coordonate cilindrice ale punctului M în spaţiu.
Relaţia dintre coordonatele cilindrice şi cele carteziene este dată de următoarele formule de
trecere de la reperul cartezian la cel cilindric:
===
.zz, θsin ρ, θ cos ρx
y
Observaţia 4. a. Dacă (ρ, θ, z) ∈ (0, ∞) × [0, 2π) × R , atunci ecuaţiile de trecere de la reperul cartezian la cel cilindric asigură o corespondenţă biunivocă: (ρ, θ, z) ∈ (0, ∞) × [0, 2π) × R → (x, y, z) ∈ 3E \ (Oz), între mulţimile (0, ∞) × [0, 2π) × R şi mulţimea de puncte 3E \ (Oz).
Transformarea inversă, care asociază unui punct M de coordonate carteziene (x, y, z) coordonatele sale cilindrice (ρ, θ, z): (x, y, z) ∈ 3E \ (Oz) → (ρ, θ, z) ∈ ∈ (0, ∞) × [0, 2π) × R dată de
relaţiile:
=
+=
,,ρ 22
zzyx cu unghiul θ, dat de relaţiile:
+=
+=
.sin
,cos
22
22
yxy
yxx
θ
θ
b. Dacă se fixează coordonata ρ = ρ0, se obţine un cilindru circular drept cu generatoarele paralele cu axa (Oz), de unde şi denumirea de coordonate cilindrice.
Exemple 3 Se dau punctele în coordonate carteziene: A(2, 2 3 , 5), B(−3, 3 , −4). Să se afle coordonatele cilindrice ale acestor puncte. Soluţie: Se ştie că (x, y, z) fiind coordonatele carteziene ale unui punct M atunci din relaţiile de legătură cu coordonatele sale cilindrice (ρ, θ, z) se obţine:
4)32(2 2222 =+=+= AA yxAρ ,
==+
=
==+
=
,23
1632sin
,21
162cos
22
22
AA
AA
AA
AA
yxy
yxx
θ
θ
de unde:
3πθ =A .Rezultă coordonatele cilindrice ale lui A, care sunt: ρA = 4, θA =
3π şi zA =
5, sau A(4,3π
,5). Analog se obţine: B( 32 , 6
5π , −4).
Se dau punctele în coordonate carteziene: A(4, −4, 6), B(−3 3 , −9, 0). Află
coordonatele cilindrice ale acestor puncte. R: A( 24 , 4
7π , 6), B(6 3 , 3
4π , 0).
Să ne reamintim…
Formule de trecere de la reperul cartezian la cel cilindric:
===
,zz, θsin ρ, θ cos ρx
y
(ρ, θ, z) ∈ (0, ∞) × [0, 2π) × R .
II..33..66.. TTrreecceerreeaa ddee llaa rreeppeerruull ccaarrtteezziiaann llaa rreeppeerruull ssffeerriicc îînn ssppaaţţiiuu Fie un punct M ∈ 3E \ (Oz), având coordonatele carteziene (x, y, z). Un alt set de coordonate, care caracterizează poziţia punctului M în

35
spaţiu, este tripletul ordonat (r, ϕ, θ), unde:
- r reprezintă distanţa, d(O, M) dintre origine şi punctul M;
- θ este unghiul dintre semidreptele [Ox şi OM’, unde M’ este proiecţia punctului M pe planul (xOy);
- ϕ este unghiul dintre semidreptele [Oz şi [OM (fig. 7).
Definiţia 5. Numerele reale (r, ϕ, θ) se numesc coordonatele sferice ale punctului M în spaţiu. Relaţiile dintre coordonatele sferice şi cele carteziene ale punctului sunt date de
următoarele formule de trecere de la reperul cartezian la cel sferic:
===
. cosr z, θsin sin r y, θ cos sin r x
ϕϕϕ
Dacă se consideră (r, ϕ, θ) ∈ (0, ∞) × (0, π) × [0, 2π), aceste formule asigură o corespondenţă biunivocă între domeniul specificat şi mulţimea de puncte 3E \ (Oz). Observaţia 5. Corespondenţa anterioară fiind biunivocă rezultă că transformarea inversă, care asociază unui punct M de coordonate carteziene (x, y, z), coordonatele sale sferice (r, ϕ, θ), (x, y, z) ∈ 3E \ (Oz) → (r, ϕ, θ) ∈ (0, ∞) × (0, π) × [0, 2π), este dată de
relaţiile:
=
++=
,arccos
,222
rz
zyxr
ϕşi unghiul θ este dat de relaţiile:
+=
+=
.sin
,cos
22
22
yxy
yxx
θ
θ
Exemple 4
Fiind date punctele în coordonate sferice:
3,
6,4 ππA ,
32,
43,8 ππB ,
65,
34,12 ππC . Să se afle coordonatele carteziene ale acestor puncte.
Soluţie: Se obţine:xA = rA sin ϕA cos θA = 4 sin6π
cos3π
= 1, yA = rA sin ϕA sin θA
= 4 sin6π
sin3π
= 3 , zA = rA cos θA = 4 cos3π
= 2. Rezultă coordonatele
carteziene ale lui A ca fiind (1, 3 , 2). Analog: B(− 2 2 , 2 6 , −4).
Fiind dat punctul în coordonate sferice:
65,
34,12 ππA . Află coordonatele
carteziene ale acestui punct. R: A(9, −3 3 , −6 3 ).
Fig. 7. x
z
y O
z
z M
M’
θ
r ϕ
36
Să ne reamintim…
Formule de trecere de la reperul cartezian la cel sferic:
===
, cosr z, θsin sin r y, θ cos sin r x
ϕϕϕ
(r, ϕ, θ)
∈ (0, ∞) × (0, π) × [0, 2π).
II..33..77.. Rezumat În prima parte a acestei unităţi de învăţare se trec în revistă principalele rezultate referitoare la translaţia şi rotaţia în plan şi în spaţiu.Astfel, se definesc translaţia şi rotaţia, se determină ecuaţiile translaţiei în plan şi în spaţiu, ale rotaţiei în plan şi în spaţiu,precum şi ale roto-translaţiei în plan. În a doua parte se definesc coordonatele polare, cilindrice, sferice şi se determină relaţiile dintre acestea şi coordonate carteziene în spaţiul euclidian cu două şi trei dimensiuni.
II..33..88.. Test de autoevaluare a cunoştinţelor 1.Completează definiţia: Se numeşte translaţie a reperului cartezian… 2.Scrie formulele de translaţie în spaţiu şi în plan. 3.Completează definiţia: Se numeşte rotaţie a reperului cartezian… 4.Scrie formulele de rotaţie şi pentru roto-translaţie în plan. 5.Scrie formulele de trecere de la reperul cartezian la cel: i) polar; ii) cilindric; iii) sferic. 6.Originea sistemului de axe rectangulare O este translatată în O’(−1, 2), iar axele se
rotesc cu un unghi 125arctg=α . Coordonatele punctelor M1(3, 2) şi M2(2, −3) sunt date în
noul sistem. Determină coordonatele punctelor M1 şi M2 în vechiul sistem de axe de coordonate.
7.Faţă de un reper cartezian din 3E se dă punctul în coordonate sferice:
3,
6,4 ππA .
Calculează coordonatele carteziene ale punctului dat. 8.Fiind dat în coordonate carteziene punctul: 6) 4, - A(4, , află coordonatele cilindrice ale acestui punct.
II..33..99.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree 11..RReevveezzii ddeeffiinniiţţiiaa 11.. 2.Revezi paragraful I.3.3;33..RReevveezzii ddeeffiinniiţţiiaa 22.. 4.Revezi cazul particular 2 din paragraful I.3.3;5.i) Revezi paragraful I.3.4.;ii) Revezi paragraful I.3.5.; iii) Revezi paragraful I.3.6.6 .M1(1, 5) şi M2(2, 0).7. A((1, 3 , 2 3 ). 8.
A((4 2 , 4
7π, 6).
37
Temă de control 1 – Algebră liniară
1. Stabileşte dacă următoarea mulţime de vectori este liniar independentă: S ={x1 = (−3, 1, 5), x2 = (6, −2, 15)}.
2. Se dau vectorii: a = λ i
+4 j
+6 k
; b
= i
+2 j
+3 k , c =2 i
+4 j
. Să se determine λ astfel încât cei trei vectori să fie coplanari şi-n acest caz să se descompune vectorul a după direcţiile vectorilor b şi c .
3. Pentru vectorii a = 3 i
+2 j
+ k
; b
= − j
+2 k , să se calculeze lungimile lor şi aria paralelogramului construit cu aceşti vectori.
4. Să se calculeze volumul tetraedrului OABC unde O(0,0,0), A(1,-1,0), B(0,1,-1), C(1,0,1), precum şi înălţimea coborâtă din O pe planul ABC.
5. Translatând axele reperului Oxy în punctul O’(-1,2), să se determine unghiul cu care trebuie rotite noile axe O’x’, O’y’ pentru ca ecuaţia x2 + 2xy + y2− 2x−2y+1, să se transforme într-o ecuaţie de forma: aX2 + bY2 + c = 0
6. Să se determine coordonatele sferice ale punctului A dacă coordonatele sale carteziene sunt (2 3 , 6, 4)
După rezolvare , lucrarea de verificare trebuie transmisă tutorelui , pe foi scrise de mână şi îndosariate.
Sugestii pentru acordarea punctajului
• Oficiu: 10 puncte • Subiectul 1: 15 puncte • Subiectul 2: 15 puncte • Subiectul 3: 15 puncte • Subiectul 4: 15 puncte • Subiectul 5: 15 puncte • Subiectul 6: 15 puncte
38
MMOODDUULLUULL IIII.. GGeeoommeettrriiee aannaalliittiiccăă
Cuprins Introducere .............................................................................................................................. 38 Competenţe ............................................................................................................................. 38
UUII IIII..11..GGeeoommeettrriiee lliinniiaarrăă îînn ssppaaţţiiuu ((Planul şi dreapta în spaţiu)) ........................................................................................ 3399 UUII IIII..22..GGeeoommeettrriiee ppăăttrraattiiccăă îînn ppllaann ((SSttuuddiiuull ccoonniicceelloorr ppee eeccuuaaţţiiii ggeenneerraallee)) ................................ 5533 UUII IIII..33..GGeeoommeettrriiee ppăăttrraattiiccăă îînn ssppaaţţiiuu ((SSffeerraa.. CCuuaaddrriiccee ppee eeccuuaaţţiiii rreedduussee))............................................................ 6611
UUII IIII..44..GGeenneerrăărrii ddee ssuupprraaffeeţţee .................................................................................................................................................................................................... 7733 Temă de control 2-Geometrie analitică ................................................................................... 79
Introducere
În liceu s-a demonstrat că într-un reper din plan o funcţie dată descrie o anumită
curbă în plan (vezi: funcţiile trigonometrice, exponenţiale, logaritmice şi în mod deosebit dreptele în plan reprezentate prin ecuaţii de gradul I şi conicele în plan, pe forme canonice, reprezentate prin ecuaţii de gradul al II-lea).
În cadrul acestei unităţi de învăţare vom arăta, la început, că într-un reper în spaţiu ecuaţiile de gradul I reprezintă plane, într-un reper în plan oricare din ecuaţiile de gradul al II-lea reprezintă o conică şi apoi revenind la un reper în spaţiu vom arăta că unei ecuaţii îi corespunde o suprafaţă.
Curbele în spaţiu se obţin prin intersecţia a două suprafeţe, cu alte cuvinte, pentru ele sunt necesare cel puţin două ecuaţii.
Competenţe După parcurgerea materialului studentul va fi capabil:
-să identifice, să definească, să caracterizeze şi să exemplifice principalele noţiuni teoretice referitoare la geometria analitică a curbelor şi a suprafeţelor: plan şi dreaptă în spaţiu, conice în plan, cuadrice în spaţiu şi generări ale unor suprafeţe; -să utilizeze în exerciţii principalele rezultate referitoare la geometria analitică a curbelor şi a suprafeţelor, necesare modulului de geometrie diferenţială, ultim în acest curs.
39
Unitatea de învăţare II.1. Geometrie liniară în spaţiu (Planul şi dreapta în spaţiu)
Cuprins II.1.1. Introducere .................................................................................................................... 39
II.1.2. Competenţe ................................................................................................................... 39 IIII..11..33.. Ecuaţii de plane ............................................................................................................. 40
IIII..11..33..11.. PPllaannuull ddeetteerrmmiinnaatt ddee ttrreeii ppuunnccttee nneeccoolliinniiaarree ........................................................................................................ 4400 IIII..11..33..22.. PPllaannuull ddeetteerrmmiinnaatt ddee oo ddrreeaappttăă şşii uunn ppuunncctt eexxtteerriioorr ddrreepptteeii.. ........................................................ 4411 IIII..11..33..33.. PPllaannuull ddeetteerrmmiinnaatt ddee uunn ppuunncctt şşii ddoouuăă ddiirreeccţţiiii nneeccoolliinniiaarree .............................................................. 4411 IIII..11..33..44.. PPllaannuull ddeetteerrmmiinnaatt ddee ppuunncctt şşii ddee uunn vveeccttoorr nnoorrmmaall.................................................................................... ..4422 IIII..11..33..55.. EEccuuaaţţiiaa ggeenneerraallăă aa ppllaannuulluuii ............................................................................................................................................................ ..4422
IIII..11..33..66.. EEccuuaaţţiiaa ppllaannuulluuii pprriinn ttăăiieettuurrii ........................................................................................................................................................ 4422 IIII..11..44.. FFaasscciiccoollee ddee ppllaannee .................................................................................................................................................................................................................. 4433 IIII..11..55.. EEccuuaaţţiiii ddee ddrreeppttee ...................................................................................................................................................................................................................... 4444
IIII..11..55..11.. DDrreeaappttaa ddeetteerrmmiinnaattăă ddee ddoouuăă ppuunnccttee .................................................................................................................................. 4444 IIII..22..55..22.. DDrreeaappttaa ddeetteerrmmiinnaattăă ddee uunn ppuunncctt şşii uunn vveeccttoorr nneennuull.. ................................................................................ 4444 IIII..11..55..33.. DDrreeaappttaa ccaa iinntteerrsseeccţţiiee aa ddoouuăă ppllaannee...................................................................................................................................... 4455
IIII..11..66.. PPoozziiţţiiii rreellaattiivvee ddee ddrreeppttee şşii ppllaannee......................................................................................................................................................................4477 IIII..11..66..11.. PPoozziiţţiiaa uunneeii ddrreeppttee ffaaţţăă ddee uunn ppllaann ........................................................................................................................................ 4477 IIII..11..66..22.. PPoozziiţţiiiillee rreellaattiivvee aa ddoouuăă ddrreeppttee .................................................................................................................................................. 4477
IIII..11..77.. UUnngghhiiuurrii şşii ddiissttaannţţee îînn ssppaaţţiiuu ................................................................................................................................................................................ 4499 IIII..11..77..11.. UUnngghhiiuull ddiinnttrree ddoouuăă ppllaannee oorriieennttaattee .................................................................................................................................. 4499 IIII..11..77..22.. UUnngghhiiuull ddiinnttrree ddoouuăă ddrreeppttee oorriieennttaattee .............................................................................................................................. ..4499 IIII..11..77..33.. UUnngghhiiuull ddiinnttrree oo ddrreeaappttăă şşii uunn ppllaann.................................................................................................................................... ..5500 IIII..11..77..44.. DDiissttaannţţaa ddee llaa uunn ppuunncctt llaa uunn ppllaann .......................................................................................................................................... 5500 IIII..11..77..55.. DDiissttaannţţaa ddee llaa uunn ppuunncctt llaa oo ddrreeaappttăă .................................................................................................................................... 5500 IIII..11..77..66.. DDiissttaannţţaa ddiinnttrree ddoouuăă ddrreeppttee oorriieennttaattee ................................................................................................................................ 5500
II.1.8. Rezumat. ....................................................................................................................... 52 II.1.9. Test de autoevaluare a cunoştinţelor ............................................................................. 52 IIII..11..1100..RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ............................................................................................................ 5522
II.1.1. Introducere În cadrul acestei unităţi de învăţare, cu ajutorul spaţiului euclidian al vectorilor liberi
3E în care se consideră un reper ortonormat R = {0, i , j , k }, se prezintă diferitele reprezentări analitice ale planelor şi dreptelor în spaţiu în funcţie de cazurile de determinare ale acestora. Se caracterizează cu ajutorul algebrei vectoriale poziţiile relative de plane şi drepte în spaţiu, faasscciiccoolleellee ddee ppllaannee şşii ssee eexxpplliiccăă formulele pentru determinarea măsurilor unghiurilor şi ale distanţelor.
II.1.2. Competenţele unităţii de învăţare După parcurgerea materialului studentul va fi capabil:
-să prezinte diferitele reprezentări analitice ale unui plan în spaţiu în funcţie de cazurile de determinare ale acestuia; -să prezinte diferitele reprezentări analitice ale unei drepte în spaţiu în funcţie de diferitele cazuri de determinare ale acesteia; -să identifice şi să explice problemele teoretice şi practice referitoare la faasscciiccoollee ddee ppllaannee;; -să caracterizeze poziţiile relative de plane şi drepte în spaţiu; -să înregistreze şi să prezinte formulele de calcul ale măsurilor unghiurilor şi ale distanţelor;

40
-să rezolve probleme care necesită ecuaţii de plane şi de drepte.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
II.1.3. EEccuuaaţţiiii ddee ppllaannee
II.1.3.11.. PPllaannuull ddeetteerrmmiinnaatt ddee ttrreeii ppuunnccttee nneeccoolliinniiaarree
Se consideră în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k } şi în acest
reper trei puncte necoliniare Mi(xi, yi, zi), i = 3,1 . Aceste puncte determină planul (π) (fig. 1). Se notează cu ir , i = 3,1 vectorii de poziţie ai punctelor Mi şi cu r vectorul de poziţie al unui
punct M(x, y, z). Pentru ca punctul M să aparţină planului (π), trebuie ca vectorii MM1 , 21MM şi
31MM să fie coplanari, deci liniar dependenţi. Rezultă că există λ, µ ∈R astfel încât:
MM1 = λ 21MM + µ 31MM , adică: 1rr − = λ( 12 rr − ) + µ( 13 rr − ), λ, µ ∈R ,
sau: (π) : r = 1r + λ( 12 rr − ) + µ( 13 rr − ), λ, µ ∈R ,
care se numeşte ecuaţia vectorială a planului determinat de trei puncte necoliniare. Ţinând cont că între componentele vectorilor se păstrează aceeaşi relaţie de dependenţă,
rezultă:
(π) :
−+−+=−+−+=−+−+=
, )()(, )()(
, )()(
13121
13121
13121
zzzzzzyyyyyy
xxxxxx
µλµλµλ
λ, µ ∈R ,care poartă numele de ecuaţiile
parametrice ale planului determinat de trei puncte necoliniare. Numerele reale λ şi µ se numesc parametri.Condiţia de coplanaritate a trei vectori se poate pune şi sub forma anulării produsului mixt a celor trei vectori, deci: ( MM1 , 21MM , 31MM ) = 0.Ţinând cont de expresia analitică a
produsului mixt rezultă: (π) :
131313
121212
111
zzyyxxzzyyxxzzyyxx
−−−−−−−−−
= 0,care se numeşte ecuaţia planului
determinat de trei puncte necoliniare sub formă de determinant de ordinul trei. Dacă se pleacă de la proprietăţile determinanţilor, ecuaţia planului sub formă de
determinant de ordinul trei se poate scrie şi sub formă de determinant de ordinul patru:
r
i j
k
O
M1
M2
M3
M
(π)
r 1 r 2
r 3
Fig. 1.
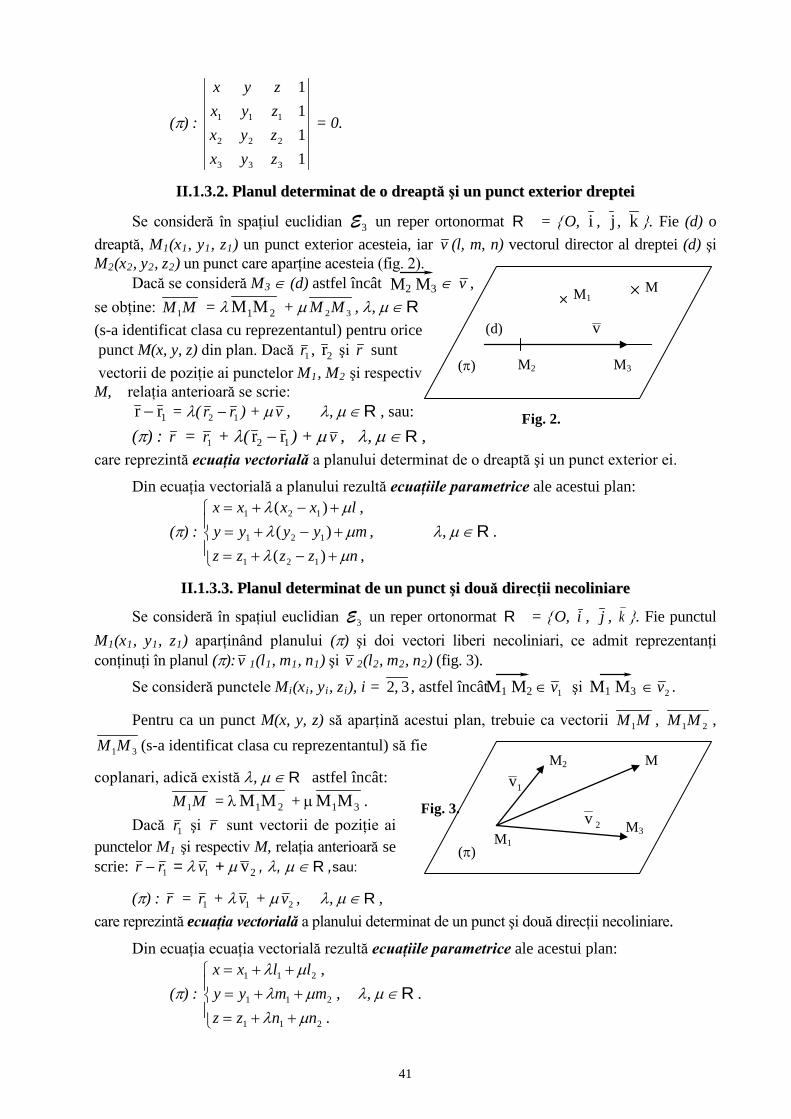
41
(π) :
1111
333
222
111
zyxzyxzyxzyx
= 0.
II.1.3.22.. PPllaannuull ddeetteerrmmiinnaatt ddee oo ddrreeaappttăă şşii uunn ppuunncctt eexxtteerriioorr ddrreepptteeii
Se consideră în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k }. Fie (d) o dreaptă, M1(x1, y1, z1) un punct exterior acesteia, iar v (l, m, n) vectorul director al dreptei (d) şi M2(x2, y2, z2) un punct care aparţine acesteia (fig. 2).
Dacă se consideră M3 ∈ (d) astfel încât ∈ v , se obţine: MM1 = λ 21MM + µ 32MM , λ, µ ∈R (s-a identificat clasa cu reprezentantul) pentru orice punct M(x, y, z) din plan. Dacă 1r , 2r şi r sunt vectorii de poziţie ai punctelor M1, M2 şi respectiv M, relaţia anterioară se scrie: 1rr − = λ( 12 rr − ) + µv , λ, µ ∈R , sau: (π) : r = 1r + λ( 12 rr − ) + µ v , λ, µ ∈R , care reprezintă ecuaţia vectorială a planului determinat de o dreaptă şi un punct exterior ei.
Din ecuaţia vectorială a planului rezultă ecuaţiile parametrice ale acestui plan:
(π) :
+−+=+−+=+−+=
, )(, )(
, )(
121
121
121
nzzzzmyyyylxxxx
µλµλµλ
λ, µ ∈R .
II.1.3.33.. PPllaannuull ddeetteerrmmiinnaatt ddee uunn ppuunncctt şşii ddoouuăă ddiirreeccţţiiii nneeccoolliinniiaarree
Se consideră în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k }. Fie punctul M1(x1, y1, z1) aparţinând planului (π) şi doi vectori liberi necoliniari, ce admit reprezentanţi conţinuţi în planul (π): v 1(l1, m1, n1) şi v 2(l2, m2, n2) (fig. 3).
Se consideră punctele Mi(xi, yi, zi), i = 3,2 , astfel încât 1v∈ şi 2v∈ .
Pentru ca un punct M(x, y, z) să aparţină acestui plan, trebuie ca vectorii MM1 , 21MM ,
31MM (s-a identificat clasa cu reprezentantul) să fie
coplanari, adică există λ, µ ∈R astfel încât: MM1 = λ 21MM + µ 31MM .
Dacă 1r şi r sunt vectorii de poziţie ai punctelor M1 şi respectiv M, relaţia anterioară se scrie: 1rr − = λ 1v + µ 2v , λ, µ ∈R ,sau:
(π) : r = 1r + λ 1v + µ 2v , λ, µ ∈R , care reprezintă ecuaţia vectorială a planului determinat de un punct şi două direcţii necoliniare.
Din ecuaţia ecuaţia vectorială rezultă ecuaţiile parametrice ale acestui plan:
(π) :
++=++=
++=
. ,
,
211
211
211
nnzzmmyy
llxx
µλµλµλ
λ, µ ∈R .
M3 M1
M2
(π)
M
2v
1v
Fig. 3.
v
M3 M2
M1
(d)
(π)
Fig. 2.
M
M1 M2
M1 M3
M2 M3

42
Dacă se scrie condiţia de coplanaritate a vectorilor MM1 , 21MM , 31MM prin anularea produsului lor mixt, rezultă:
(π) :
222
111
111
mnlnml
zzyyxx −−− = 0,
care reprezintă ecuaţia acestui plan sub formă de determinant de ordinul al treilea.
II.1.3.44.. PPllaannuull ddeetteerrmmiinnaatt ddee ppuunncctt şşii ddee uunn vveeccttoorr nnoorrmmaall
Se consideră în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k }. Fie punctul M0(x0, y0, z0) conţinut în planul (π) şi un vector liber nenul N (p, q, r), normal la planul (π) (fig. 4).Fie M(x, y, z) un punct oarecare din plan, iar 0r şi r vectorii de poziţie ai punctelor M0 şi respectiv M. Rezultă că ( r − 0r ) ⊥ N .
Se obţine: (π) : ( r − 0r ) ⋅ N = 0, care este ecuaţia vectorială a planului determinat un punct şi un vector nenul normal la plan. Din ecuaţia vectorială a planului rezultă ecuaţia:
(π) : (x − x0) ⋅ p + (y − y0) ⋅ q + (z − z0) ⋅ r = 0, sau: (π) : px + qy + rz + l = 0. Fig.4.
II.1.3.55.. EEccuuaaţţiiaa ggeenneerraallăă aa ppllaannuulluuii
Dacă privim ecuaţiile planelor determinate până acum, rezultă că unui plan îi corespunde o ecuaţie de gradul întâi în necunoscutele x, y, z.
Să demonstrăm, că reciproc, unei ecuaţii de gradul întâi în trei necunoscute îi corespunde un plan în spaţiu.
Fie: Ax + By + Cz + D = 0, A, B, C, D ∈ R ,o ecuaţie liniară, care admite ∞2 soluţii.Dacă (x0, y0, z0) este o soluţie a acestei ecuaţii, atunci Ax0 + By0 + Cz0 + D = 0.
Prin scăderea celor două ecuaţii, se obţine: A(x − x0) + B(y − y0) + C(z − z0) = 0, care reprezintă ecuaţia unui plan determinat de un punct şi un vector normal la plan.
Dacă se compară ultima ecuaţie cu (π) : (x − x0) ⋅ p + (y − y0) ⋅ q + (z − z0) ⋅ r = 0, rezultă că soluţia (x0, y0, z0) conduce la M0(x0, y0, z0) şi N (A, B, C), fiind vectorul normal la plan.
Ecuaţia Ax + By + Cz + D = 0, A, B, C, D ∈ R , poartă numele de ecuaţia carteziană generală a planului.
II.1.3.66.. EEccuuaaţţiiaa ppllaannuulluuii pprriinn ttăăiieettuurrii
Se consideră în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k }. Fie un plan, care nu trece prin originea axelor de coordonate şi determină pe axele respective nişte segmente de lungime a, b şi respectiv c. Punctele de intersecţie ale planului cu aceste axe sunt: A(a, 0, 0); B(0, b, 0) şi C(0, 0, c).Dacă se scrie ecuaţia planului determinat de cele trei puncte necoliniare, se
obţine: (π) :
1001001001
cb
azyx
= 0. Se dezvoltă după prima linie acest determinant şi se obţine:(π) :
01=−++cz
by
ax
, care poartă numele de ecuaţia planului prin tăieturi.
Exemple 1 Să se scrie ecuaţia planului (π) paralel cu planul (π1): 3x – y + z – 6 = 0 şi care trece
N
M0 (π)
M

43
prin mijlocul segmentului determinat de punctele M1(1, 3, 2) şi M2(1, −5, −4). Soluţie: Coordonatele mijlocului M al segmentului [M1M2] sunt: ,1=Mx ,1−=My
1−=Mz .Normala la planul (π) căutat este aceeaşi cu normala la planul (π1), adică
kjiNN +−== 31 . Ecuaţia planului căutat este:(π) : 3(x − 1) − 1(y + 1) + 1(z + 1) = 0, respectiv (π) : 3x − y + z − 3 = 0.
Scrie ecuaţia generală a planului (π) care: i) trece prin punctul P(6,-5,2) şi taie pe axele de coordonate segmente pozitive egale între ele; ii)are ecuaţiile parametrice: x=-2+3u-4v, y=1-2u-v, z=1+u+v. R: i) (π): x+y+z-3=0, ii) (π): x+7y+11z-16=0.
Să ne reamintim… • Ecuaţia carteziană generală a planului: Ax + By + Cz + D = 0, A, B, C, D ∈ R .
• Ecuaţia planului prin tăieturi: 01=−++cz
by
ax .
• Ecuaţia planului determinat un punct şi un vector nenul normal la plan: A(x − x0) + B(y − y0) + C(z − z0) = 0.
• Ecuaţia planului determinat de un punct şi două direcţii necoliniare sub formă de
determinant:
222
111
111
mnlnml
zzyyxx −−− = 0.
• Ecuaţiile parametrice ale planului determinat de un punct şi două direcţii
necoliniare:
++=++=
++=
. ,
,
211
211
211
nnzzmmyy
llxx
µλµλµλ
λ, µ ∈R .
II.1.4. FFaasscciiccoollee ddee ppllaannee
Se consideră în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k }.
Definiţia 1. Se numeşte fascicol de plane, totalitatea planelor care trec prin intersecţia comună a două plane date.
Planele date care se intersectează se numesc plane fundamentale ale fascicolului. Fie (π1) şi (π2) două plane care se intersectează după o dreaptă şi (π) un plan oarecare, care
trece prin dreapta comună:(π1) : A1x + B1y + C1z + D1 = 0,(π2) : A2x + B2y + C2z + D2 = 0, (π) : Ax + By + Cz + D = 0.
Rangul matricei sistemului format din ecuaţiile planelor (π1), (π2), (π) trebuie să fie doi şi determinantul caracteristic corespunzător minorului principal trebuie să fie nul :
0222
111
=CBACBACBA
, 022
11 ≠=∆BABA
p şi 0222
111
=−−−
=∆DBADBADBA
c .
Din condiţiile de proporţionalitate a liniilor celor doi determinanţi de ordinul trei, rezultă că există α, β ∈ R astfel încât:
xβAαAA 21 ⋅+= , yβBαBB 21 ⋅+= , zβCαCC 21 ⋅+= ,
121 ⋅+= βDαDD . Dacă se amplifică relaţiile, respectiv cu x, y, z şi 1 şi se adună pe verticală, se obţine:
Ax + By + Cz + D = α(A1x + B1y + C1z + D1) + β(A2x + B2y + C2z + D2). Adică: (π) = α(π1) + β(π2). Rezultă că ecuaţia fascicolului este: (π) : α(π1) + β(π2) = 0.

44
Deoarece α2 + β2 > 0, adică cel puţin unul din parametrii α, β este nenul şi notăm cu
αβλ = , rezultă ecuaţia fascicolului: (π) : (π1) + λ(π2) = 0,numită ecuaţia fascicolului redus .
Exemple 2 Să se scrie ecuaţia generală a planului (π) care trece prin axa (Oz) şi prin punctul A(-3,1,-2). Soluţie: Folosind ecuaţia fascicolului redus se obţine ecuaţia planului căutat de forma (π): x+λy = 0. Punând condiţia ca punctul A să aparţină acestui plan, rezultă λ = 3, de unde (π) : x+3y = 0.
Scrie ecuaţia generală a planului (π) care este paralel cu axa (Ox) şi care trece prin punctele A(4,0,-2) şi B(5,1,7). R: (π) : 9y – z – 2 = 0.
Să ne reamintim… • Ecuaţia fascicolului de plane fundamentale (π1) şi (π2):α(π1) + β(π2) = 0,α, β∈
R . • Ecuaţia fascicolului redus: (π) : (π1) + λ(π2) = 0 (α2 + β2 > 0, adică cel puţin
unul din parametrii α, β este nenul şi am notat αβλ = ).
II.1.5. EEccuuaaţţiiii ddee ddrreeppttee
II.1.5.11.. DDrreeaappttaa ddeetteerrmmiinnaattăă ddee ddoouuăă ppuunnccttee
Fie în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k } şi două puncte distincte M1(x1, y1, z1) şi M2(x2, y2, z2). Aceste puncte determină o dreaptă unică (d) (fig. 5).
Pentru ca un punct M(x, y, z) să aparţină acestei drepte, trebuie ca vectorii MM1 şi 21MM să fie coliniari ( ∈ MM1 , ∈ 21MM ), adică există λ ∈R astfel încât:
MM1 = λ 21MM (s-a identificat clasa cu reprezentantul).Se notează cu 1r , 2r şi r vectorii de poziţie ai punctelor M1, M2 şi respectiv M, rezultă: 1rr − = λ( 12 rr − ) adică,
(d) : r = 1r + λ( 12 rr − ), λ ∈R , care poartă denumirea de ecuaţia vectorială a dreptei determinată de două puncte distincte. Dacă se înmulţeşte scalar ecuaţia vectorială succesiv cu i , j respectiv cu k , se obţin relaţiile:
(d) :
∈−+=−+=−+=
,, )(, )(, )(
121
121
121
Rλλλλ
zzzzyyyyxxxx
numite ecuaţiile
parametrice ale dreptei determinată de două puncte distincte.Din ecuaţiile parametrice rezultă
(d) : 12
1
12
1
12
1
zzzz
yyyy
xxxx
−−
=−−
=−− , numite ecuaţiile dreptei sub formă de rapoarte.
II.1.5.22.. DDrreeaappttaa ddeetteerrmmiinnaattăă ddee uunn ppuunncctt şşii uunn vveeccttoorr nneennuull
În spaţiul euclidian 3E se consideră un reper ortonormat R = {O, i , j , k }. Fie M0(x0, y0, z0) ∈ 3E un punct fixat şi un vector liber nenul v (l, m, n) dat. Atunci există o dreaptă (d) şi numai una care trece Fig. 6.
(d) r
i j
k
M1 M2
M r 1 r 2
O Fig. 5.
M1M
M1M2
O
(d) r
i j
k
M0
M r 0 v

45
prin M0 şi care are direcţia dată de vectorul v (fig. 6).Pentru ca un punct M să aparţină dreptei, trebuie ca vectorii MM 0 şi v să fie coliniari, deci MM 0 = λ v , λ ∈R , unde ∈ MM 0 . Dacă 0r şi r sunt vectorii de poziţie ai punctelor M0 şi M se obţine: r − 0r = λv , adică: (d) : r = 0r + λ v , λ ∈R , care reprezintă ecuaţia vectorială a dreptei determinată de un punct şi o direcţie. Vectorul v se numeşte vector director al dreptei.
Din ecuaţia vectorială rezultă: (d) :
∈+=+=+=
Rλλλλ
, ,
,
0
0
0
nzzmyylxx
care reprezintă ecuaţiile
parametrice ale dreptei. Din ecuaţiile parametrice sau din condiţia de coliniaritate a doi vectori
rezultă: (d) : n
zzm
yylxx 000 −
=−
=− , numite ecuaţiile dreptei sub formă de rapoarte.
II.1.5.33.. DDrreeaappttaa ccaa iinntteerrsseeccţţiiee aa ddoouuăă ppllaannee
Se consideră în spaţiul euclidian 3E un reper ortonormat R = {O, i , j , k }. Fie două plane de ecuaţii generale:(π1): A1x + B1y + C1z + D1 = 0, (π2): A2x + B2y + C2z + D2 = 0.
Poziţiile relative ale celor două plane se stabilesc dacă se interpretează din punct de vedere
geometric soluţiile sistemului:
==
,0)(,0)(
2
1
ππ
care are matricea:
222
111
CBACBA
.
CAZUL I Dacă rangul matricei este doi, fie 022
11 ≠=∆BABA
p , atunci
sistemul:
+−=++−=+
),(),(
2222
1111
DzCyBxADzCyBxA
este compatibil simplu nedeterminat, adică admite o infinitate
simplă de soluţii. Fie o soluţie particulară din această infinitate de soluţii. Dacă z = z0, atunci rezultă soluţia corespunzătoare (x0, y0, z0) şi cum acesteia îi corespunde în spaţiu un punct M0, rezultă că acest punct aparţine atât planului (π1) cât şi lui (π2). Rezultă că cele două plane au o infinitate de puncte comune, deci intersecţia lor este o dreaptă.
CAZUL II Dacă rangul matricei este unu, atunci se obţine proporţionalitatea
coeficienţilor:2
1
2
1
2
1
CC
BB
AA
== .Fie determinantul principal 01 ≠=∆ Ap . Atunci determinantul
caracteristic corespunzător este: 22
11
DADA
c −−
=∆ .
CAZUL II1 Dacă ∆c ≠ 0 sistemul este incompatibil, deci planele nu au nici un punct comun, adică
ele sunt paralele. Din faptul că ∆c ≠ 0 rezultă 2
1
2
1
DD
AA
≠ , deci condiţia ca două plane să fie paralele este:
2
1
2
1
2
1
CC
BB
AA
==2
1
DD
≠ .
CAZUL II2 Dacă ∆c = 0, atunci sistemul este compatibil dublu nedeterminat, deci cele două plane au o infinitate dublă de puncte comune, adică ele sunt confundate.
Se obţine condiţia ca două plane să fie confundate: 2
1
2
1
2
1
CC
BB
AA
==2
1
DD
= .
La cadrul studiului efectuat la cazul I, s-a observat că, dacă rangul matricei sistemului format din ecuaţiile celor două plane este doi, planele se taie după o dreaptă.
În acest caz, ecuaţiile dreptei dată ca intersecţie a două plane neparalele şi neconfundate:
M0M
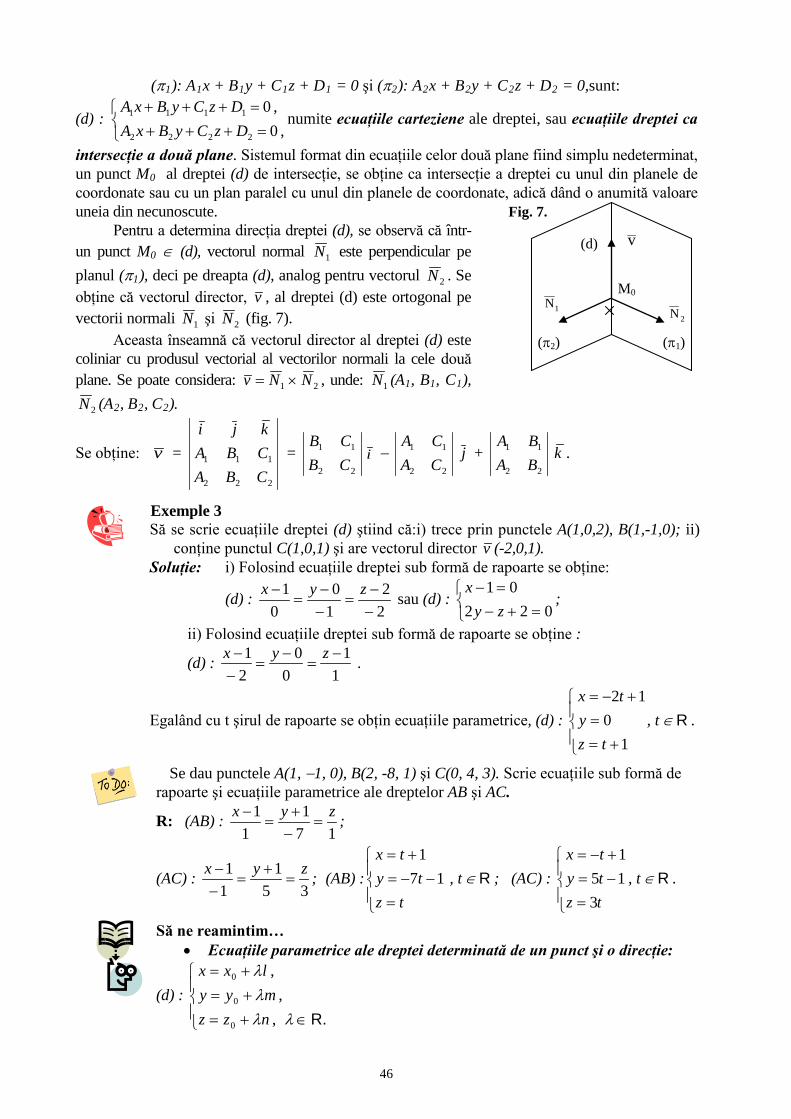
46
(π1): A1x + B1y + C1z + D1 = 0 şi (π2): A2x + B2y + C2z + D2 = 0,sunt:
(d) :
=+++=+++
, 0, 0
2222
1111
DzCyBxADzCyBxA
numite ecuaţiile carteziene ale dreptei, sau ecuaţiile dreptei ca
intersecţie a două plane. Sistemul format din ecuaţiile celor două plane fiind simplu nedeterminat, un punct M0 al dreptei (d) de intersecţie, se obţine ca intersecţie a dreptei cu unul din planele de coordonate sau cu un plan paralel cu unul din planele de coordonate, adică dând o anumită valoare uneia din necunoscute. Fig. 7.
Pentru a determina direcţia dreptei (d), se observă că într-un punct M0 ∈ (d), vectorul normal 1N este perpendicular pe planul (π1), deci pe dreapta (d), analog pentru vectorul 2N . Se obţine că vectorul director, v , al dreptei (d) este ortogonal pe vectorii normali 1N şi 2N (fig. 7).
Aceasta înseamnă că vectorul director al dreptei (d) este coliniar cu produsul vectorial al vectorilor normali la cele două plane. Se poate considera: 21 NNv ×= , unde: 1N (A1, B1, C1),
2N (A2, B2, C2).
Se obţine: v =
222
111
CBACBAkji
= 22
11
CBCB
i − 22
11
CACA
j + 22
11
BABA
k .
Exemple 3 Să se scrie ecuaţiile dreptei (d) ştiind că:i) trece prin punctele A(1,0,2), B(1,-1,0); ii)
conţine punctul C(1,0,1) şi are vectorul director v (-2,0,1). Soluţie: i) Folosind ecuaţiile dreptei sub formă de rapoarte se obţine:
(d) : 22
10
01
−−
=−−
=− zyx sau (d) :
=+−=−
02201
zyx
;
ii) Folosind ecuaţiile dreptei sub formă de rapoarte se obţine :
(d) : 1
10
021 −
=−
=−− zyx .
Egalând cu t şirul de rapoarte se obţin ecuaţiile parametrice, (d) :
+==
+−=
10
12
tzy
tx, t ∈R .
Se dau punctele A(1, −1, 0), B(2, -8, 1) şi C(0, 4, 3). Scrie ecuaţiile sub formă de rapoarte şi ecuaţiile parametrice ale dreptelor AB şi AC.
R: (AB) : 17
11
1 zyx=
−+
=− ;
(AC) : 35
111 zyx
=+
=−− ; (AB) :
=−−=
+=
tzty
tx17
1 , t ∈R ; (AC) :
=−=+−=
tztytx
3151
, t ∈R .
Să ne reamintim… • Ecuaţiile parametrice ale dreptei determinată de un punct şi o direcţie:
(d) :
∈+=+=+=
R.λλλλ
, ,
,
0
0
0
nzzmyylxx
M0
2N
v
1N
(π1) (π2)
(d)
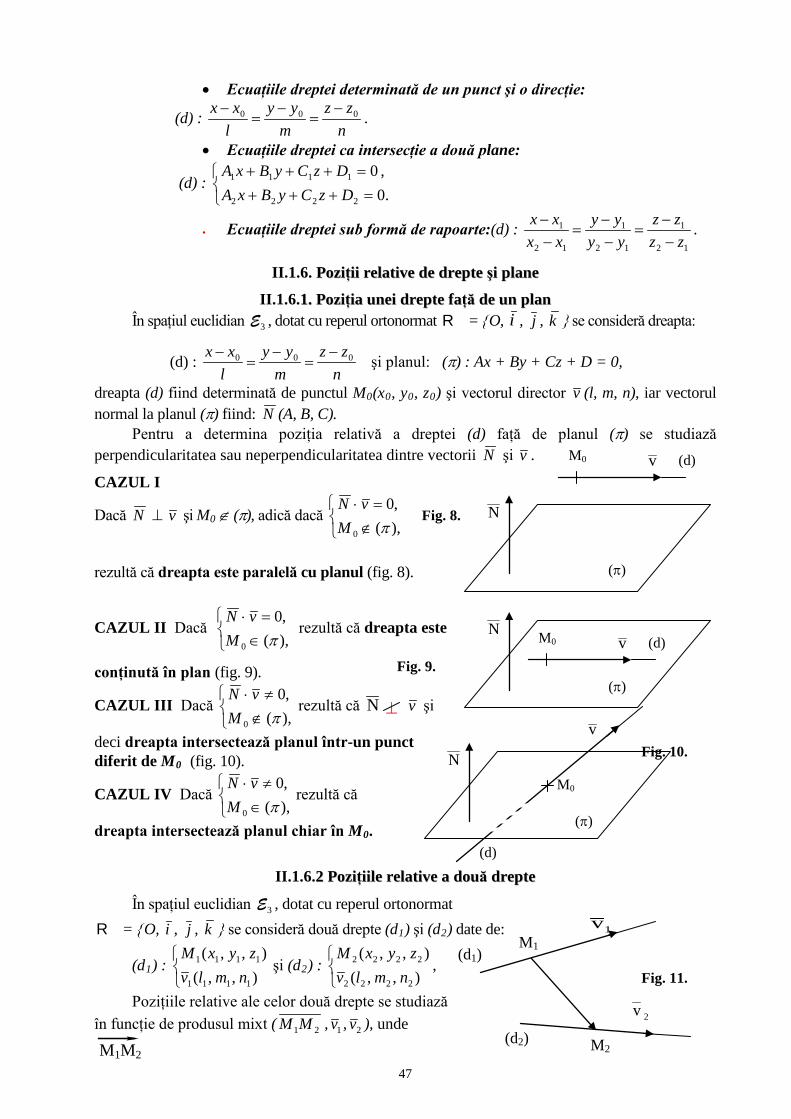
47
• Ecuaţiile dreptei determinată de un punct şi o direcţie:
(d) : n
zzm
yylxx 000 −
=−
=− .
• Ecuaţiile dreptei ca intersecţie a două plane:
(d) :
=+++=+++
0., 0
2222
1111
DzCyBxADzCyBxA
• Ecuaţiile dreptei sub formă de rapoarte:(d) : 12
1
12
1
12
1
zzzz
yyyy
xxxx
−−
=−−
=−− .
II.1.6. PPoozziiţţiiii rreellaattiivvee ddee ddrreeppttee şşii ppllaannee
II.1.6.11.. PPoozziiţţiiaa uunneeii ddrreeppttee ffaaţţăă ddee uunn ppllaann În spaţiul euclidian 3E , dotat cu reperul ortonormat R = {O, i , j , k } se consideră dreapta:
(d) : n
zzm
yylxx 000 −
=−
=− şi planul: (π) : Ax + By + Cz + D = 0,
dreapta (d) fiind determinată de punctul M0(x0, y0, z0) şi vectorul director v (l, m, n), iar vectorul normal la planul (π) fiind: N (A, B, C).
Pentru a determina poziţia relativă a dreptei (d) faţă de planul (π) se studiază perpendicularitatea sau neperpendicularitatea dintre vectorii N şi v .
CAZUL I
Dacă N ⊥ v şi M0 ∉ (π), adică dacă
∉=⋅
),(,0
0 πMvN
Fig. 8.
rezultă că dreapta este paralelă cu planul (fig. 8).
CAZUL II Dacă
∈=⋅
),(,0
0 πMvN
rezultă că dreapta este
conţinută în plan (fig. 9).
CAZUL III Dacă
∉≠⋅
),(,0
0 πMvN
rezultă că N v şi
deci dreapta intersectează planul într-un punct diferit de M0 (fig. 10).
CAZUL IV Dacă
∈≠⋅
),(,0
0 πMvN
rezultă că
dreapta intersectează planul chiar în M0.
II.1.6.22 PPoozziiţţiiiillee rreellaattiivvee aa ddoouuăă ddrreeppttee
În spaţiul euclidian 3E , dotat cu reperul ortonormat R = {O, i , j , k } se consideră două drepte (d1) şi (d2) date de:
(d1) :
),,(),,(
1111
1111
nmlvzyxM
şi (d2) :
),,(),,(
2222
2222
nmlvzyxM
,
Poziţiile relative ale celor două drepte se studiază în funcţie de produsul mixt ( 21MM , 1v , 2v ), unde
v (d) M0
N
(π)
v (d) M0 N
(π)
⊥
M2
M1 (d1)
2v
1v
(d2)
Fig. 9.
v
(d)
M0
N
(π)
M1M2
Fig. 10.
Fig. 11.

48
∈ 21MM (fig. 11).
CAZUL I Dacă ( 21MM , 1v , 2v ) ≠ 0, rezultă că vectorii 21MM , 1v , 2v nu sunt coplanari, deci dreptele (d1) şi (d2) sunt oarecare în spaţiu.
CAZUL II Dacă ( 21MM , 1v , 2v ) = 0, rezultă că vectorii 21MM , 1v , 2v sunt coplanari. Se obţine: CAZUL II1 Dacă 1v , 2v sunt coliniari şi M1 ∉ (d2), rezultă că dreptele (d1) şi (d2) sunt paralele. CAZUL II2 Dacă 1v , 2v sunt coliniari şi M1 ∈ (d2), rezultă că dreptele (d1) şi (d2) coincid. CAZUL II3 Dacă 1v , 2v nu sunt coliniari, rezultă că dreptele (d1) şi (d2) sunt concurente.
Exemple 4
1. Se consideră planul (π) : 3x + 5y − 2z − 6 = 0 şi dreapta 3
267
43:)( 1
+=
−−
=+ zyxd
Să se arate că: (d1) intersectează planul (π). Să se determine coordonatele punctului de intersecţie;
Soluţie: Fie )3,6,4(1 −v , vectorul director al dreptei (d1) şi )2,5,3( −N vectorul director al normalei planului (π). Deoarece: 1v 024 ≠−=⋅N rezultă că dreapta (d1) intersectează planul (π). Coordonatele punctului A de intersecţie sunt soluţiile
sistemului:
+=
−−
=+
=−−+
.3
267
43
,06253zyx
zyx Se obţine: A(1, 1, 1).
2. Să se determine ecuaţiile perpendicularei coborâte din punctul M(1, −1, −2) pe
dreapta:(d) : 11
12
3−
=−
=+ zyx , precum şi simetricul punctului M faţă de dreapta (d).
Soluţie: Ecuaţia planului care trece prin M şi este perpendicular pe dreapta (d) este: (π) : 2x + y − z – 3 = 0. Coordonatele punctului A de intersecţie dintre dreapta (d) şi planul (π) se obţin considerând sistemul:
−=
−=
+=−−+
,11
12
3,032
zyxzyx
sau:
=−+++−−=+=−=
.031)32(2,
,1,32
λλλλλλ
zyx
Se obţine:
−−=
34,
37,
31A .Dreapta perpendiculară pe dreapta (d) care trece prin
punctul M este dreapta (d’), determinată de punctele A şi M:(d’) :
12
51
21
−+
=−+
=− zyx .Fie M’ simetricul punctului M faţă de dreapta (d). Aşadar A este
mijlocul segmentului [MM’]. Se obţine: 352' −=−= MAM xxx ,
3172' =−= MAM yyy ,
322' −=−= MAM zzz .
Află simetricul M’ al punctului M(-1,2,0) faţă de planul (π) : x + 2y- z + 3 = 0. R : M’ (-3,-2,2).

49
Să ne reamintim…
Dreapta este paralelă cu planul:
∈=⋅
).(,0
0 πMvN
şi conţinută în plan:
∈=⋅
).(,0
0 πMvN
Dreapta intersectează planul: .0≠⋅ vN
Dreptele (d1) şi (d2) sunt oarecare în spaţiu: ( 21MM , 1v , 2v ) ≠ 0. Dreptele (d1) şi (d2) sunt paralele: 1v , 2v sunt coliniari şi M1 ∉ (d2). Dreptele (d1) şi (d2) coincid: 1v , 2v sunt coliniari şi M1 ∈ (d2). Dreptele (d1) şi (d2) sunt concurente: 1v , 2v nu sunt coliniari.
II.1.7.UUnngghhiiuurrii şşii ddiissttaannţţee îînn ssppaaţţiiuu
II.1.7.11.. UUnngghhiiuull ddiinnttrree ddoouuăă ppllaannee oorriieennttaattee În spaţiul euclidian 3E , dotat cu reperul ortonormat R = {O, i , j , k } se consideră
(π) : Ax + By + Cz + D = 0, un plan dat (fig. 12).
Definiţia 2. Planul (π), împreună cu o alegere a sensului pe normală se numeşte plan orientat.
Evident, dintre cele două feţe ale planului, faţa care corespunde sensului ales pe normală se notează cu (+), iar faţa opusă cu (−) (fig. 12).
Fig. 12. Definiţia 3. Se numeşte unghi diedru dintre două plane orientate (π1) şi (π2), unghiul dintre cei doi vectori normali ai lor 1N şi 2N de măsură α determinată prin:
cos α= 21
21
NNNN⋅⋅ =
22
22
22
21
21
21
212121
CBACBA
CCBBAA
++⋅++
++ .
Din definiţia unghiului dintre două plane, rezultă că două plane sunt perpendiculare dacă vectorii lor normali sunt perpendiculari, adică: 0212121 =++ CCBBAA .
II.1.7.22.. UUnngghhiiuull ddiinnttrree ddoouuăă ddrreeppttee oorriieennttaattee
În spaţiul euclidian 3E , se consideră reperul ortonormat R = {O, i , j , k }. Fiind dată o dreaptă (d) în spaţiu, se pot stabili pe acesta două sensuri de parcurgere, notate cu (+) şi (−).
Definiţia 4. Se numeşte dreaptă orientată o dreaptă (d) împreună cu un sens de parcurgere al acesteia, care va fi sensul pozitiv pe dreaptă.
Dacă este precizat v , vectorul director al dreptei (d), atunci se acceptă ca sens pozitiv pe dreaptă, sensul acestuia, iar dreapta orientată va fi dată de cuplul ((d), v ).
Definiţia 5. Se numeşte unghi dintre dreptele orientate ((d1), 1v ) şi ((d2), 2v ), unghiul de măsură α dintre vectorii lor directori 1v (l1, m1, n1) şi 2v (l2, m2, n2) (fig. 13). Acesta este deci dat de relaţia:
cos α = 21
21
vvvv⋅⋅ =
22
22
22
21
21
21
212121
nmlnml
nnmmll
++⋅++
++ .
Rezultă condiţia de perpendicularitate a două drepte: 0212121 =++ nnmmll .
(π)
M0
N (A, B, C)
N−
(+)
(−)
Fig. 13.
(d1)
2v
1v
(d2)
α

50
II.1.7.33.. UUnngghhiiuull ddiinnttrree oo ddrreeaappttăă şşii uunn ppllaann În spaţiul euclidian 3E , dotat cu reperul ortonormat R = {O, i , j , k } se consideră
dreapta orientată ((d), v ), şi planul orientat ((π), N ), unde v (l, m, n) şi N (A, B, C) (fig. 14).
Definiţia 6. Se numeşte unghi dintre o dreaptă şi un plan cel mai mic unghi dintre dreaptă şi proiecţia ei ortogonală pe plan. În cazul în care (d) || (π) se consideră unghiul de măsură zero.
Fie dreapta orientată:
(d) : n
zzm
yylxx 000 −
=−
=−
şi planul orientat: (π) : Ax + By + Cz + D = 0.
Fie (d’) proiecţia ortogonală a dreptei (d)
pe planul (π) (fig. 14). Unghiul căutat este unghiul de măsură ϕ, dar cum determinarea direcţiei dreptei (d’) este mai greu de aflat, se calculează complementul unghiului de măsură ϕ, care este unghiul dintre
N şi v : cos (900 - ϕ) = vN
vN⋅⋅ deci: sin ϕ =
222222 nmlCBACnBmAl
++⋅++
++ .
Se observă că dreapta este paralelă cu planul, dacă şi numai dacă Al + Bm + Cn.=.0 şi
perpendiculară pe plan dacă şi numai dacă N şi v sunt coliniari, adică Cn
Bm
Al
== .
II.1.7.44.. DDiissttaannţţaa ddee llaa uunn ppuunncctt llaa uunn ppllaann
În spaţiul euclidian 3E , dotat cu reperul ortonormat R = {O, i , j , k }, se consideră planul (π) de ecuaţie (π) : Ax + By + Cz + D = 0, al cărui vector normal este N (A, B, C) şi punctul M0(x0, y0, z0) exterior planului (π).
Distanţa de la un punct la un plan este distanţa de la punct proiecţia lui ortogonală pe plan.
Se obţine: d(M0, (π)) = 222
000
CBA
DCzByAx
++
+++.
II.1.7.55.. DDiissttaannţţaa ddee llaa uunn ppuunncctt llaa oo ddrreeaappttăă îînn ssppaaţţiiuu În spaţiul euclidian 3E , dotat cu reperul ortonormat R = {O, i , j , k }, se consideră
dreapta (d), determinată de punctul M0(x0, y0, z0) şi vectorul director v (l, m, n) şi punctul M(x, y, z) exterior dreptei (d) .
Fie M' proiecţia ortogonală a punctului M pe dreapta (d), atunci distanţa de la M la dreapta (d), este distanţa de la M la M', adică distanţa de la M la proiecţia sa ortogonală pe dreaptă. Se notează această distanţă cu d(M, (d)). Se obţine:
v
vMM(d))d(M,
0 ×= .
II.1.7.66.. DDiissttaannţţaa ddiinnttrree ddoouuăă ddrreeppttee oorriieennttaattee
În spaţiul euclidian 3E , dotat cu reperul ortonormat R = {O, i , j , k }, se consideră două drepte (d1) şi (d2) determinate de punctele M1(x1, y1, z1) şi respectiv M2(x2, y2, z2) şi de vectorii directori 1v (l1, m1, n1) şi respectiv 2v (l2, m2, n2) (fig. 15).
Definiţia 7. Se numeşte distanţa dintre dreptele (d1) şi (d2) numărul: inf d(M, N), unde M ∈ (d1) şi N ∈ (d2), două puncte mobile.
1. Dacă dreptele (d1) şi (d2) sunt paralele, atunci distanţa dintre ele, este distanţa de la un punct de pe una dintre drepte la cealaltă dreaptă.
Fig. 14. (d’)
M0
N
(π)
(d) N
ϕ
900 - ϕ
M
v

51
2. Dacă dreptele sunt concurente, atunci distanţa dintre cele două drepte este nulă.
3. Dacă dreptele (d1) şi (d2) sunt oarecare în spaţiu, distanţa dintre cele două drepte este lungimea segmentului perpendicularei comune dintre cele două drepte.
Dacă se duce prin dreapta (d1) un plan (P) paralel cu dreapta (d2), rezultă că distanţa dintre cele două drepte este distanţa h de la M2 la acest plan (fig.15).Se obţine că distanţa dintre cele două drepte este de fapt lungimea înălţimii paralelipipedului construit pe suporturile reprezentanţilor cu originea comună , M1, a vectorilor liberi: 21MM , 1v , 2v .
Rezulta: d((d1), (d2)) = 21
2121
vv)v,v,MM(ε
×, ε = ±1, Fig. 15.
unde ε se consideră, astfel ca d((d1), (d2)) să fie pozitivă. Exemple 5
Să se determine un plan care trece prin intersecţia planelor:(π1) : x + 5y + z = 0 şi (π2) : x – z + 4 = 0
şi care formează cu planul (π3) : x – 4y – 8z + 12 = 0 un unghi de măsură 4π .
Soluţie: Planul (π) care trece prin intersecţia planelor (π1) şi (π2), aparţine fascicolului de plane fundamentale (π1) şi (π2), deci are ecuaţia:(π) : (α + β)x + 5αy
+ (α −β)z + 4β = 0.Pentru ca planele (π) şi (π3) să formeze un unghi de măsură 4π
trebuie ca vectorii directori ai normalelor celor două plane să formeze unghiul de
măsură cerută, adică:4
cosπ , de unde: 3α2 + 4αβ = 0. Pentru α = 0 se obţine (π) ≡
(π2). Pentru 34
−=α β ≠ 0, rezultă (π) : x + 20y + 7z – 12 = 0.
Se dau planele (π1): x+2y+4z-1=0, (π2): 2x+4y+8z-9=0, (π3): 2x+y-z+10=0 şi (π4): x+y+z-2=0. Demonstrează: i) (π1)|| (π2); ii) (π1) şi (π3) sunt perpendiculare şi află ecuaţiile dreptei (d) de intersecţie a lor; iii) determină măsura α a unghiului format de planele (π1) şi (π4).
R: i) Coeficienţii A, B, C ai celor două plane sunt proporţionali, ii) Produsul scalar al vectorilor normali corespunzători celor două plane este nul,
(d) :
=+−+=−++
01020142
zyxzyx
, iii)
=
637arccosα .
Să ne reamintim…
Distanţa de la un punct la un plan: d(M0, (π)) = 222
000
CBA
DCzByAx
++
+++.
Distanţa de la un punct la o dreaptă: d(M,(d))= v
vMM 0 ×.
Distanţa dintre două drepte: d((d1), (d2)) = 21
2121
vv)v,v,MM(ε
×, ε = ±1.
v 2
M2
(d2)
21MM
(d1) (P)
M1
h
v 1
v 2
N
M

52
IIII..11..88.. Rezumat În această unitate de învăţare se analizează următoarele cazuri de determinare ale unui plan: planul determinat de: trei puncte necoliniare, de o dreaptă şi un punct exterior ei,de un punct şi două direcţii necoliniare, de un punct şi vector normal lui.Se tratează următoarele cazuri de determinare ale unei drepte: dreapta determinată de: două puncte, de un punct şi un vector nenul, de intersecţia a două plane. Se prezintă următoarele poziţii relative de plane şi drepte în spaţiu: poziţia unei drepte faţă de un plan; poziţiile relative a două drepte în spaţiu. În final se determină formule de calcul ale măsurilor unghiurilor: dintre două plane orientate; dintre două drepte orientate; dintre o dreaptă orientată şi un plan orientat; precum şi formule de calcul ale distanţei: de la un punct la un plan; de la un punct la o dreaptă; dintre două drepte.
IIII..11..99.. Test de autoevaluare a cunoştinţelor 1.Prezintă cazurile de determinare ale: i) unui plan. ii) unei drepte în spaţiu. 2.i) Scrie minim cinci forme de ecuaţii de plane.ii) Scrie minim cinci forme de ecuaţii de drepte. 3.Caracterizează (utilizând calculul vectorial): i)trei poziţii relative ale unei drepte faţă de un plan. ii) trei poziţii relative a două drepte în spaţiu. 4.Scrie trei formule care să conducă la determinarea măsurii unor unghiuri în spaţiul euclidian tridimensional. 5.Scrie trei formule care să reprezinte distanţe in spaţiul euclidian tridimensional.
6.Scrie ecuaţia planului (π) care trece prin mijlocul segmentului [M1M2], unde M1(1,
−1, 2) şi M2(4, −3, 1), este paralel cu dreapta (d) : 13
12
1 zyx=
+=
− şi este
perpendicular pe planul (π1) : x – 2y – z – 1 = 0.
7.Se dă un tetraedru ABCD definit de punctele A(3,0,0), B(2,4,0), C(-3,-1,0) şi D(0,0,5). Determină lungimile înălţimilor tetraedrului.
8. Fie planele (π1) : x + y + z – 1=0 şi (π2) : 2x-y+z-5=0. Determină ecuaţia planului (π3), simetricul planului (π1) faţă de planul (π2). 9. Află simetricul A’,al punctului A(2, 1, 1) faţă de planul (π):x + y + 3z + 5 = 0.
IIII..11..1100.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree 11.. ii))RReevveezzii ppaarraaggrraaffuull IIII..11..33..-- ccaazzuurriillee:: 11..,,……,,66..;; iiii)) RReevveezzii ppaarraaggrraaffuull IIII..11..55..--
ccaazzuurriillee:: 11..,,22..,,33.. 22.. ii)) RReevveezzii ppaarraaggrraaffeellee:: IIII..11..33..11..,,……,, IIII..11..33..66..;; iiii)) RReevveezzii ppaarraaggrraaffeellee:: IIII..11..55..11..,,
IIII..11..55..22..,, IIII..11..55..33.. 33.. ii))RReevveezzii ppaarraaggrraaffuull IIII..11..66..11..-- ccaazzuurriillee::II,, IIII,, IIVV;; iiii)) RReevveezzii ppaarraaggrraaffuull IIII..11..66..22..--
ccaazzuurriillee::II,, IIII1 ,,IIII 2 ,, IIII 3 .. 4. RReevveezzii ppaarraaggrraaffeellee:: IIII..11..77..11..,, IIII..11..77..22..,, IIII..11..77..33.. 5. RReevveezzii ppaarraaggrraaffeellee:: IIII..11..77..44..,, IIII..11..77..55..,, IIII..11..77..66.. 6. (π) : x − 3y + 7z − 19 = 0.
7. ,54
25=Ah ,
934125
=Bh ,569
125=Ch .5=Dh
8. (π3) : x-5y-z-7=0. 9. A’(0, -1, -5).
53
Unitatea de învăţare II.2. Geometrie pătratică în plan (Studiul conicelor pe ecuaţii generale)
Cuprins II.2.1. Introducere .................................................................................................................... 53
II.2.2. Competenţe ................................................................................................................... 53 IIII..22..33.. NNooţţiiuunnii ggeenneerraallee ........................................................................................................................................................................................................................ 5533 IIII..22..44.. CCeennttrruull uunneeii ccoonniiccee .............................................................................................................................................................................................................. 5555 IIII..22..55.. RReedduucceerreeaa llaa ffoorrmmaa ccaannoonniiccăă aa eeccuuaaţţiieeii uunneeii ccoonniiccee .......................................................................................................... 5577 IIII..22..66.. Rezumat ................................................................................................................................................................................................................................................ 6600
IIII..22..77.. Test de autoevaluare a cunoştinţelor .......................................................................................................................................................... 6600 IIII..22..88.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ....................................................... 60
II.2.1. Introducere Curbele plane de gradul al II-lea studiate în liceu, pe ecuaţii canonice: elipsa, hiperbola şi parabola, îşi găsesc generalizarea în cadrul acestei unităţi de învăţare. Conicele, reprezintă o clasă de curbe plane, cu proprietăţi remarcabile, având aplicaţii importante în construcţii, arhitectură şi în diverse alte domenii. Relativ la acestea, se prezintă caracterizările algebrice, principalele proprietăţi geometrice şi reprezentările lor grafice, studiul făcându-se în repere carteziene ortonormate, convenabil alese..
II.2.2. Competenţele unităţii de învăţare După parcurgerea materialului studentul va fi capabil: -să definească şi să exemplifice noţiunea de conică; -să clasifice conicele în funcţie de invarianţii ortogonali ai acestora; -să determine centrul unei conice, când acesta există; -să aplice cunoştinţele referitoare la rotaţie şi translaţie în plan, în scopul reducerii la forma canonică a conicelor; -să aplice în exerciţii cunoştinţele teoretice referitoare la conice.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
II.2.3. NNooţţiiuunnii ggeenneerraallee Fie 2E , spaţiul punctual euclidian real, bidimensional, raportat la un reper cartezian
ortonormat { }j ,i ,0=R şi fie funcţia: f(x, y) = a11x2 + 2a12xy + a22y2 + 2a13x + 2a23y + a33, a11
2 + a122 + a22
2 ≠ 0. Definiţia 1. Se numeşte conică o mulţime (Γ) de puncte M din planul 2E , ale căror coordonate carteziene (x, y), în raport cu reperul R , satisfac ecuaţia algebrică de gradul al doilea: f(x, y) = 0, cu aij = aji, i ≠ j, aij ∈ R , i, j = 3,1 numită ecuaţia conicei în raport cu reperul R .
Din studiile anterioare sunt cunoscute câteva exemple de astfel de mulţimi de puncte, numite curbe algebrice de ordinul al doilea, date în tabelul 1.

54
Tabelul 1
cerc elipsă hiperbolă
x2 + y2 = r2 01=−+b²y²
a²x² 01=−−
²²
²²
by
ax
parabolă pereche de drepte concurente pereche de drepte paralele
y2 = 2 px 0=−b²y²
a²x² x2 – a2 = 0
pereche de drepte confundate mulţime cu un singur punct mulţimea vidă
•
∅
x2 = 0 0=+
b²y²
a²x² 01=++
b²y²
a²x² sau x2 + a2 =0,
0≠a Dorim să demonstrăm că orice curbă de gradul al Ii-lea din definiţia dată, nu poate avea
decât una din formele grafice aflate în tabelul de mai sus. În acest scop, utilizăm schimbarea axelor de coordonate şi anume folosind roto-translaţia, se realizează trecerea de la reperul cartezian ortonormat { }j ,i ,0=R la un reper ortonormat adecvat, orientat pozitiv, numit reper canonic sau natural faţă de care ecuaţia f(x, y) = 0 să aibă forma cea mai simplă posibilă, numită ecuaţia canonică sau ecuaţia redusă.
După cum se va vedea ulterior, în discuţie intervin următoarele numere ataşate funcţiei f(x, y):
333231
232221
131211
aaaaaaaaa
=∆ , 2221
1211
aaaa
=δ , I = a11 + a22, cu aij = aji, i ≠ j, aij ∈ R , i, j = 3,1 .

55
Prin trecerea de la reperul R , la reperul canonic, polinomul f(x, y) se schimbă în f(x’, y’). Se
poate arăta că numerele ∆’, δ’, Ι’ ataşate polinomului f(x', y') sunt respectiv egale cu numerele ∆, δ, Ι. De aceea ∆, δ, Ι se numesc invarianţii ortogonali ai conicei.
Scrie ecuaţiile canonice ale conicelor studiate în liceu. R: Vezi tabelul 1.
Să ne reamintim…
Invarianţii ortogonali ai conicei :
333231
232221
131211
aaaaaaaaa
=∆ , 2221
1211
aaaa
=δ , I = a11 + a22,
cu aij = aji, i ≠ j, aij ∈ R , i, j = 3,1 . Se numeşte conică o mulţime (Γ) de puncte M din planul 2E , ale căror coordonate carteziene (x, y), în raport cu reperul R , satisfac ecuaţia algebrică de gradul al doilea: a11x2 + 2a12xy + a22y2 + 2a13x + 2a23y + a33, a11
2 + a122 + a22
2 = 0, cu aij = aji, i ≠ j, aij ∈ R , i, j = 3,1 numită ecuaţia conicei în raport cu reperul R .
IIII..22..44.. CCeennttrruull uunneeii ccoonniiccee
Există conice (Γ) : f(x, y) = 0 care admit un centru de simetrie. Acest centru este de fapt originea reperului canonic. Pentru a găsi relaţiile care conduc la centrul unei conice, se efectuează o translaţie:
+=+=
'.,'
0
0
yyyxxx
Ecuaţia conicei faţă de sistemul translatat în C(x0, y0) este: f(x0 + x’, y0 + y’) = 0. Dacă se aplică formula lui Taylor pentru funcţii de două variabile, această ecuaţie se poate
scrie: f(x0 +x’, y0 + y’) = f(x0, y0) +
∂∂
+∂∂
00 y f '
xf x'
! 11 y +
+
∂∂
+∂∂
∂+
∂∂
20
22
00
2
20
22
y f '
xf y' x'2
xf x'
! 21 y
y = 0, unde:
===
++=
++=
,a 2y
f ,2ay x
f ,a 2 x
f
,a 2ya 2xa 2y f
,a 2ya 2xa 2 x
f
2220
2
1200
2
1120
2
230220120
130120110
∂∂
∂∂∂
∂∂
∂∂∂∂
dezvoltarea se opreşte la derivatele de ordinul al doilea, deoarece toate derivatele de ordin mai mare ca doi sunt nule.
Punctele (x', y') şi (−x', −y') sunt pe curba (Γ) (f(x’, y’) = f(−x’, −y’)) dacă şi numai dacă
expresia: 00 y
f y' x
f x'∂∂
∂∂
+ este identic nulă, adică dacă şi numai dacă punctul (x0, y0) satisface
relaţiile: 0y f 0,
xf
00
==∂∂
∂∂ . De aceea, dacă o conică (Γ) are centru, atunci coordonatele centrului
sunt în mod necesar soluţia sistemului:

56
=++≡⋅
=++≡⋅
0.ayaxay f
21
0,ayaxa xf
21
232221
131211
∂∂∂∂
Determinantul sistemului este: 22211
2221
121112
aaaaaaa
δ −== .
Dacă δ ≠ 0, atunci sistemul are soluţie unică şi deci (Γ) admite centru de simetrie (cerc, elipsă, hiperbolă, pereche de drepte concurente, punct). În acest caz, ecuaţia conicei redusă la centru este:
a11x’2 + 2 a12x’y’ + a22y’2 + f(x0, y0) = 0. Importanţa invariantului ∆
În cazul δ ≠ 0, invariantul ∆ determină constanta f(x0, y0). Într-adevăr, din definiţia I, avem: f(x0, y0) = (a11x0 + a12y0 + a13) x0 + (a21x0 + a22y0 + a23) y0 + (a13x0 + a23y0 +
a33). Rezultă că: f(x0, y0) = a13x0 + a23y0 + a33 Atunci, sistemul
=−++=++=++
0,)y ,f(xayaxa0,ayaxa0,ayaxa
0033032031
23022021
13012011
de trei ecuaţii cu două necunoscute: x0, y0, este compatibil dacă determinantul său caracteristic este nul, adică:
( )0
)y ,f(xaaaaaaaaa
00333231
232221
131211
=−−−−
.
Acesta se poate scrie:
0)y ,f(xaa
0aa0aa
aaaaaaaaa
003231
2221
1211
333231
232221
131211
=+− , de unde: δ∆
=)y ,( 00xf .
Astfel ecuaţia redusă la centru este: a11x’2 + 2 a12x’y’ + a22y’2 +δ∆ = 0.
CAZUL I Dacă ∆ = 0, ecuaţia redusă devine: a11x’2 + 2 a12x’y’ + a22y’2 = 0. Conica se spune că este degenerată.
CAZUL I1 Dacă δ < 0 (discriminantul ecuaţiei de mai sus este pozitiv), această ecuaţie reprezintă două
drepte care trec prin centrul conicei. CAZUL I2
Dacă δ > 0, (discriminantul ecuaţiei de mai sus este negativ) ecuaţia reprezintă mulţimea {(0, 0)}. CAZUL I3
Dacă δ = 0, (discriminantul ecuaţiei de mai sus este nul) ecuaţia reprezintă două drepte paralele, sau confundate, sau mulţimea vidă. CAZUL II
Dacă ∆ ≠ 0, conica este nedegenerată (cerc, elipsă, hiperbolă, parabolă, mulţime vidă).
Observaţia 1. a. Numărul ∆ - numit determinantul mare al conicei, determină natura conicei, adică: nedegenerată sau degenerată.

57
b. Numărul δ - numit determinantul mic al conicei, determină genul conicei astfel: i) dacă δ > 0 (elipsă, mulţime vidă), conica se numeşte de gen eliptic; ii) dacă δ < 0 (hiperbolă, pereche de drepte concurente), conica se numeşte de gen
hiperbolic; iii) dacă δ = 0 (parabolă, drepte paralele sau confundate), conica se numeşte de gen
parabolic. În concluzie, folosind invarianţii ortogonali ai unei conice, se poate da următoarea
clasificare ortogonală a conicelor (tabelul 2):
Tabelul 2
Condiţii Conica (Γ) ∆ = 0, δ > 0 Punct dublu.
∆ = 0, δ = 0 (Γ) = (d1) ∪ (d2), unde (d1) şi (d2) sunt drepte paralele sau confundate, sau (Γ) = ∅.
∆ = 0, δ < 0 (Γ) = (d1) ∪ (d2), (d1) şi (d2) sunt drepte concurente. Dacă în plus: I = 0 rezultă (d1) ⊥ (d2).
∆ ≠ 0, δ > 0, Ι ⋅ ∆ < 0 Elipsă. ∆ ≠ 0, δ > 0, Ι ⋅ ∆ > 0 (Γ) = ∅.
∆ ≠ 0, δ = 0 Parabolă. ∆ ≠ 0, δ < 0 Hiperbolă şi dacă în plus: I = 0 se obţine, hiperbolă echilateră.
Exemple 1 Se dă conica (Γ) : 4xy + 3y2 + 16x + 12y – 36 = 0. Se cer: natura, genul şi centrul
conicei.
Soluţie: 01443668632820
≠=−
=∆ , deci (Γ) este o conică nedegenerată.
3220
=δ = −4 < 0, rezultă că (Γ) este o hiperbolă.
=++=+
.0632,082
:yx
yC Se obţine: C(3, −4).
Se dă conica (Γ) : 4x 2 + xy - y2 - 5x + y = 0. Determină: natura, genul şi centrul
conicei. RR:: (Γ) este o conică nedegenerată. (Γ) este o hiperbolă. C(179 ,
1713 ).
Să ne reamintim…
CCeennttrruull uunneeii ccoonniiccee::
=++≡⋅
=++≡⋅
0.ayaxay f
21
0,ayaxa xf
21
232221
131211
∂∂∂∂
IIII..22..55.. RReedduucceerreeaa llaa ffoorrmmaa ccaannoonniiccăă aa eeccuuaaţţiieeii uunneeii ccoonniiccee
Fie conica: (Γ) : a11x2 + 2 a12xy + a22y2 + 2 a13x + 2 a23y + a33 = 0. Se urmăreşte ca printr-o schimbare de reper, ce constă dintr-o rotaţie compusă cu o
translaţie, să se obţină reperul canonic al conicei (Γ), respectiv, ecuaţia canonică a lui (Γ). În continuare se descrie modul în care se află ecuaţiile schimbării de reper (de coordonate). Pentru stabilirea ecuaţiei canonice se au în vedere următoarele situaţii:

58
1. Dacă a12 = 0, atunci se face o translaţie. Aceasta se determină diferit, după cum conica este cu centru sau nu. În primul caz, originea se mută în centrul C al conicei, deci translaţie de vector OC , în al doilea caz, ecuaţiile translaţiei se determină dacă se efectuează restrângeri de pătrate şi/sau grupări de termeni liberi.
2. Dacă a12 ≠ 0, atunci se face mai întâi o rotaţie.
Se poate determina rotaţia sistemului de axe de coordonate, aflând unghiul θ cu care se roteşte reperul dat, astfel încât în noul reper (x’Oy’), monomul x’y’ să nu apară (coeficientul său să fie zero).
Matricea R a schimbării de bază (ce duce versorii reperului iniţial în cei ai reperului rotit) este o matrice ortogonală de determinant +1. Bazele fiind ortonormate, coeficienţii noilor versori sunt exact cosinusurile directoare ale direcţiilor lor (cosinusurile unghiurilor noilor versori faţă
de versorii axelor de coordonate) , deci:
−=
θ cosθsin θsin θ cos
R .
Teorema 1. Fie conica cu centru (Γ) : f(x, y) = 0, astfel încât în ecuaţia conicei să fie îndeplinită condiţia a12 ≠ 0 (deci apare monomul xy). Dacă se efectuează rotaţia reperului iniţial (xOy) → (x’Oy’) cu unghiul θ ce satisface ecuaţia: (a11 – a22) sin 2θ = 2 a12 cos 2θ, atunci ecuaţia conicei în sistemul rotit (Γ) : f(x’, y’) = 0 nu mai conţine monomul x’y’.
Pentru demonstraţie a se consulta [7]-pag.160.
Observaţia 2. Relaţia anterioară este echivalentă cu: 2211
12
aaa 22 −
=θtg şi dacă se impune condiţia
ca unghiul de rotaţie să fie în intervalul (0, π], se obţine 2 θ ≤ π şi deci sin 2θ > 0.
Teorema 2. Fie conica fără centru (Γ) : f(x, y) = 0, astfel încât în ecuaţia conicei să fie îndeplinită condiţia a12 ≠ 0. Dacă se efectuează rotaţia (xOy) → (x’Oy’) cu unghiul θ ce satisface ecuaţia:
12
11
aa −=θtg , atunci ecuaţia conicei în sistemul rotit nu mai conţine monomul x’y’.
Demonstraţie: δ ≡ 2122211 aaa − = 0 şi se verifică echivalenţa formulelor din teoremele 1 şi 2.
Observaţia 3. După aplicarea rotaţiei, reperul canonic se obţine printr-o translaţie, fie se restrâng pătratele şi/sau se grupează termenii liniari rămaşi, ori se translatează originea O în centrul conicei.
Exemple 2 Să se stabilească natura şi genul conicei: (Γ) : 9x2 – 6xy + y2 + 20x = 0 şi să se reducă la forma canonică, folosind metoda roto-translaţiei.
Soluţie: 1000010013
1039Δ −=−
−= 0≠ , rezultă conica este nedegenerată.
01339
δ =−
−= , deci conica este o parabolă.Din
2211
12
aaa 22 −
=θtg rezultă
432θ tg −= sau
43
θ tg1θ tg22 −=
−; 03θ tg8θ tg3 2 =−− cu soluţiile:
31θ tg3;θ tg −== . Dacă se consideră că rotaţia se face în sens pozitiv
(trigonometric) şi că
∈
2π 0,θ rezultă tg θ = 3.Dacă se ţine cont că:
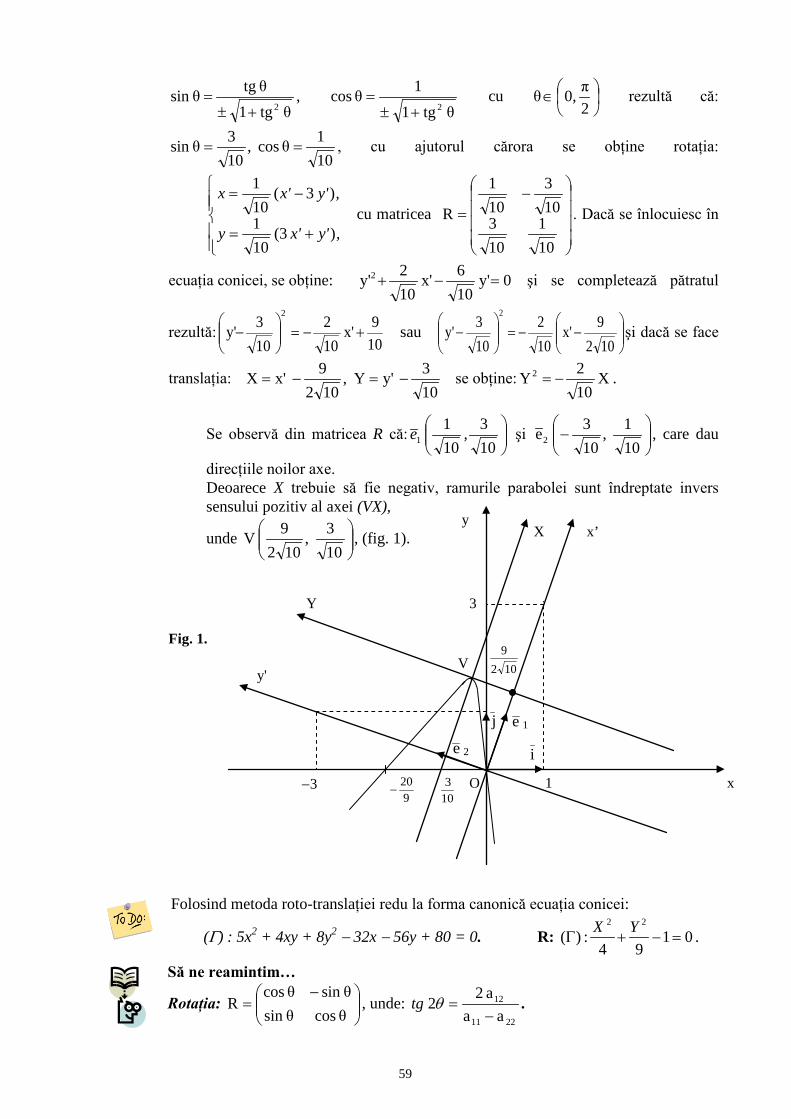
59
θ tg1θ tgθsin
2+±= ,
θ tg11θ cos
2+±= cu
∈
2π 0,θ rezultă că:
101θ cos ,
103θsin == , cu ajutorul cărora se obţine rotaţia:
,y'x'y
,y'x'x
+=
−=
) 3( 101
) 3( 101
cu matricea
−=
101
103
103
101
R . Dacă se înlocuiesc în
ecuaţia conicei, se obţine: 0y' 106 x'
102y'2 =−+ şi se completează pătratul
rezultă:109 x'
102
103y'
2
+−=
− sau
−−=
−
1029 x'
102
103 y'
2
şi dacă se face
translaţia: 103 y'Y ,
1029 x'X −=−= se obţine: X
102Y2 −= .
Se observă din matricea R că:
103
101 1 ,e şi
−
101 ,
103 e2 , care dau
direcţiile noilor axe. Deoarece X trebuie să fie negativ, ramurile parabolei sunt îndreptate invers sensului pozitiv al axei (VX),
unde
103 ,
1029 V , (fig. 1).
Fig. 1.
Folosind metoda roto-translaţiei redu la forma canonică ecuaţia conicei:
(Γ) : 5x2 + 4xy + 8y2 − 32x − 56y + 80 = 0. R: 0194
:)(22
=−+ΓYX .
Să ne reamintim…
Rotaţia:
−=
θ cosθsin θsin θ cos
R , unde: 2211
12
aaa 22 −
=θtg .
V
1 x −3
y'
Y
O
3
y X x’
i
j
e 2
e 1
103
1029
920
−
60
IIII..22..66.. Rezumat În această unitate de învăţare se prezintă rezultate referitoare la curbele algebrice de ordinul al doilea, după cum mai sunt numite conicele. Astfel, se defineşte noţiunea de conică, iar pentru conicele cu centru se determină relaţiile care conduc la aflarea centrului acestora. Reducerea la forma canonică a ecuaţiei unei conice, se rezolvă prin două metode: metoda valorilor proprii şi metoda roto-translaţiei.
IIII..22..77.. Test de autoevaluare a cunoştinţelor 1.Completează definiţiile: i)Se numeşte conică o mulţime (Γ) de puncte…ii)Coordonatele centrului unei conice sunt în mod necesar soluţia sistemului… 2.Scrie formulele de calcul ale invarianţilor ortogonali ai unei conice. 3.Prezintă clasificarea ortogonală a conicelor. 4.În cazul conicelor cu centru şi în a căror ecuaţie este îndeplinită condiţia: a 12 0≠ , scrie ecuaţia pe care o satisface unghiul de rotaţie θ . 5. i) Stabileşte natura şi genul conicei : (Γ) : 4x2 + 4xy+ y2 − 13x − 4y + 8 = 0. ii) Redu la forma canonică şi reprezintă grafic conica dată.
IIII..22..88.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree 11..ii)) RReevveezzii ddeeffiinniiţţiiaa 11;; iiii))RReevveezzii ppaarraaggrraaffuull IIII..22..44.. -- CCeennttrruull uunneeii ccoonniiccee .. 2.Revezi paragraful II.2.3. 3.Revezi tabelul 2. 4.Revezi teorema 1., sau observaţia 2.
5. i) conică nedegenerată, de gen parabolic; ii) (Γ): X 5
1Y2 = .
61
Unitatea de învăţare II.3. Geometrie pătratică în spaţiu (Sfera. Cuadrice pe ecuaţii reduse)
Cuprins II.3.1. Introducere .................................................................................................................... 61
II.3.2. Competenţe ................................................................................................................... 61 IIII..33..33.. SSffeerraa ............................................................................................................................................................................................................................................................ 6622 IIII..33..33..11..EEccuuaaţţiiiillee ssffeerreeii ...................................................................................................................................................................................................... 6622 IIII..33..33..22.. IInntteerrsseeccţţiiaa uunneeii ssffeerree ccuu oo ddrreeaappttăă .......................................................................................................................................... 6633 IIII..33..33..33.. PPoozziiţţiiaa uunnuuii ppllaann ffaaţţăă ddee oo ssffeerrăă ................................................................................................................................................ 6644 IIII..33..33..44.. PPuutteerreeaa uunnuuii ppuunncctt ffaaţţăă ddee oo ssffeerrăă .......................................................................................................................................... 6655 IIII..33..44.. EElliippssooiidduull ............................................................................................................................................................................................................................................ 6677 IIII..33..55.. HHiippeerrbboollooiidduull ccuu oo ppâânnzzăă ............................................................................................................................................................................................ 6688 IIII..33..66.. HHiippeerrbboollooiidduull ccuu ddoouuăă ppâânnzzee ................................................................................................................................................................................ 7700
IIII..33..77.. PPaarraabboollooiidduull eelliippttiicc .............................................................................................................................................................................................................. 7700 IIII..33..88.. PPaarraabboollooiidduull hhiippeerrbboolliicc .................................................................................................................................................................................................. 7711 II.3.9. Rezumat ................................................................................................................................................................................................................................................ 7722 IIII..33..1100.. Test de autoevaluare a cunoştinţelor ...................................................................................................................................................... 7722 IIII..33..1111.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ..................................................... 72
II.3.1. Introducere Cuadricele sau suprafeţele algebrice de ordinul al doilea, reprezintă o clasă de suprafeţe în spaţiu, cu proprietăţi remarcabile, având aplicaţii importante în construcţii, arhitectură şi în diverse alte domenii. Se prezintă principalele proprietăţi geometrice şi reprezentările lor grafice, studiul fiind explicat în repere carteziene ortonormate, convenabil alese.
.
II.3.2. Competenţele unităţii de învăţare După parcurgerea materialului studentul va fi capabil:
-să definească şi să exemplifice noţiunea de cuadrică; -să înregistreze diferitele ecuaţii ale sferei, precum şi celelalte noţiuni teoretice referitoare la sfera studiată pe ecuaţie generală şi să le aplice în exerciţii; -să definească conceptele de: putere a unui punct faţă de o sferă, plan radical a două sfere, axă radicală a trei sfere; -să identifice poziţiile relative ale unei drepte faţă de o sferă; -să identifice poziţiile relative ale unui plan faţă de o sferă; -să identifice cuadricele dublu riglate şi să determine familiile de generatoare rectilinii ale acestora; -să prezinte noţiunile teoretice referitoare la cuadricele studiate pe ecuaţii canonice: elipsoidul, hiperboloidul cu o pânză, hiperboloidul cu două pânze, paraboloidul eliptic şi paraboloidul hiperbolic.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
CCuuaaddrriiccee Fie R = {O, i , j , k } un reper ortonormat în spaţiul euclidian 3E .
Definiţia 1. Se numeşte cuadrică (suprafaţă algebrică de ordinul al doilea) locul geometric, (Σ), al punctelor M din spaţiul euclidian 3E , ale căror coordonate (x, y, z), în raport cu reperul ortonormat R satisfac ecuaţia algebrică:

62
f(x, y, z) ≡ a11x2 + a22y2 + a33z2 + 2a12xy + 2a13xz + 2a23yz + 2a14x + 2a24y + 2a34z + a44 = 0, a11
2 + a222 + a33
2 + a122 + a13
2 + a232 ≠ 0.
Prin trecerea de la reperul R = {O, i , j , k } la un reper cartezian adecvat, orientat pozitiv, numit reper canonic, faţă de care ecuaţia f(x, y, z) = 0 să aibă cea mai simplă formă posibilă, numită ecuaţie canonică, se dovedeşte că (Σ) este congruentă cu una din mulţimile: sferă, elipsoid, hiperboloid cu o pânză, hiperboloid cu două pânze, paraboloid eliptic, paraboloid hiperbolic, con, cilindru, pereche de plane secante, pereche de plane paralele, pereche de plane confundate, dreaptă, mulţime care conţine un punct, mulţime vidă.
Dintre cuadrice, în continuare se studiază sfera pe ecuaţie generală, celelalte exemple de cuadrice se studiază pe forme canonice (reduse).
IIII..33..33.. SSffeerraa IIII..33..33..11..EEccuuaaţţiiiillee ssffeerreeii
Fie C(a, b, c) ∈ 3E un punct fix, R > 0 un număr real fixat. Definiţia 2. Mulţimea punctelor M(x, y, z) ∈ 3E cu proprietatea că distanţa de la aceste puncte la punctul fix C este egală cu R, d(M,C) = R, este o suprafaţă numită sferă, de centru C şi rază R.
Dacă se are în vedere expresia analitică a distanţei dintre două puncte se obţine: (S) : (x – a)2 + (y – b)2 + (z – c)2 = R2,
care se numeşte ecuaţia carteziană implicită a sferei de centru C şi rază R. După dezvoltarea pătratelor şi ordonarea termenilor, se obţine ecuaţia:
(S) : x2 + y2 + z2 – 2ax – 2by – 2cz + d = 0, unde d = a2 + b2 + c2 – R2. numită ecuaţia carteziană generală a sferei. Observaţia 1. Sfera este o cuadrică în care a11 = a22 = a33 ≠ 0 şi a12 = a13 = a23 = 0, adică:
(S) : A(x2 + y2 + z2) + Bx + Cy + Dz + E = 0 reprezintă ecuaţia unei sfere.
Din ecuaţia carteziană a sferei rezultă raza sferei: R = dcba −++ 222 .
Dacă: 1. a2 + b2 + c2 – d > 0, atunci sfera este reală cu centrul C(a, b, c) şi raza R; 2. a2 + b2 + c2 – d = 0, atunci sfera este un punct şi anume centrul C(a, b, c). 3. a2 + b2 + c2 – d < 0, atunci sfera este imaginară. Fiind dată o sferă (S) de rază R şi centru C(a, b, c), atunci ecuaţia carteziană implicită a sferei (S)
este echivalentă cu trei ecuaţii parametrice în 3R (fig. 1):
(S) :
∈∈+=+=+=
π],,[π), θ,[, Rcz,θ Rby,θ Rax
02 0cossinsincossin
ϕθϕϕ
Fig. 1
sau cu ecuaţia vectorială:
)kjθiθR(rr:(S) θϕϕ cossinsincossin 0 +++= . Exemple 1
Să se scrie ecuaţia sferei cu centrul în C(−2, 1,−3) tangentă la planul: (π): x – 2y + 2z – 3 = 0.
Soluţie: Raza sferei tangentă la un plan este egală cu distanţa de la centrul sferei la acel plan. Deoarece distanţa punctului C la planul (π) este:
M
C R ϕ
θ
M0

63
( ) 313
221
3)3(2122))(,(
222=
+−+
−−+⋅−−=πCd , rezultă că ecuaţia sferei tangentă la (π) este:
(S) : (x + 2)2 + (y – 1)2 + (z + 3)2 = 9
169,
sau: (S) : 9x2 + 9y2 + 9z2 + 36x – 18y + 54z – 43 = 0.
Scrie ecuaţia sferei cu centrul pe dreapta 1
211
1:)( +
=−−
=zyxd , având raza
R = 5 şi care trece prin punctul A(0 , 2 , -1). R: (S) : (x + 1)2 + (y – 2)2 + (z + 3)2 = 5,
(S’) : (x - 1)2 + y2 + (z + 1)2 = 5.
Să ne reamintim… Ecuaţia carteziană implicită a sferei de centru C(a,b,c) şi rază R: (S) : (x – a)2 + (y – b)2 + (z – c)2 = R2.
Ecuaţiile parametrice: (S) :
∈∈+=+=+=
π],,[π), θ,[, Rcz,θ Rby,θ Rax
02 0cossinsincossin
ϕθϕϕ
Ecuaţia vectorială: )kjθiθR(rr:(S) θϕϕ cossinsincossin 0 +++= , π],[π), θ,[ 02 0 ∈∈ϕ .
IIII..33..33..22.. IInntteerrsseeccţţiiaa uunneeii ssffeerree ccuu oo ddrreeaappttăă
Fie sfera: (S) : x2 + y2 + z2 – 2ax – 2by – 2cz + d = 0, a2 + b2 + c2 – d > 0.
şi dreapta: (d):
+=+=+=
,zz,yy,xx
γρβραρ
coscoscos
0
0
0
care trece prin punctul P0(x0, y0, z0) ∉ (S) şi are versorul
director e (cos α, cos β, cos γ). Problema intersecţiei dintre dreapta (d) şi sfera (S) revine la rezolvarea sistemului format
din ecuaţiile dreptei şi ecuaţia sferei. Dacă se înlocuiesc x, y, z din ecuaţiile dreptei în ecuaţia sferei, se obţine ecuaţia de gradul
al doilea în ρ: ρ2(cos2 α + cos2 β + cos2 γ) + 2ρ[(x0 – a)cos α + (y0 – b)cos β + (z0 – c)cos γ)] +
+ x02 + y0
2 + z02 – 2ax0 – 2by0 – 2cz0 + d = 0
Dar cos α, cos β, cos γ sunt cosinusurile directoare ale direcţiei şi deci: cos2 α + cos2 β + cos2 γ = 1, iar x0
2 + y02 + z0
2 – 2ax0 – 2by0 – 2cz0 + d = S(x0, y0, z0), atunci rezultă: ρ2 + 2ρ[(x0 – a)cos α + (y0 – b)cos β + (z0 – c)cos γ)] + S(x0, y0, z0) = 0.
Dacă se notează cu ∆ - discriminantul acestei ecuaţii, se obţine: 1. Dacă ∆ > 0, atunci ρ1 ≠ ρ2 ∈ R , deci dreapta este secantă şi taie sfera în două puncte
distincte M1 şi M2. 2. Dacă ∆ = 0, atunci ρ1 = ρ2 ∈ R , deci dreapta intersectează sfera în două puncte
confundate, aşadar este tangentă la sferă. 3. Dacă ∆ < 0, atunci ρ1, ρ2 ∈ C , deci dreapta nu taie sfera, aşadar este exterioară sferei. Dacă punctul P0(x0, y0, z0) ∈ (S) (fig. 2), atunci S(x0, y0, z0) = 0 şi ecuaţia
ρ2 + 2ρ[(x0 – a)cos α + (y0 – b)cos β + (z0 – c)cos γ)] + S(x0, y0, z0) = 0 devine: ρ2 + 2ρ[(x0 – a)cos α + (y0 – b)cos β + (z0 – c)cos γ)] = 0 şi deci ρ1 = 0 şi ρ2 ≠ 0. Fig. 2.
P0 ≡ M1
M2
(S)

64
Dacă se doreşte ca dreapta (d) să fie tangentă sferei în punctul P0 ∈ (S) trebuie ca ρ1 = ρ2, ceea ce înseamnă că ρ = 0 şi deci: (x0 – a)cos α + (y0 – b)cos β + (z0 – c)cos γ = 0.Din ecuaţiile
parametrice ale dreptei (d) rezultă: ρ
α 0cosxx −
= , ρ
β 0cos yy −= ,
ργ 0cos zz −= ,
şi prin înlocuire în ecuaţia precedentă se obţine: (x0 – a)(x – x0) + (y0 – b) (y – y0) + (z0 – c) (z – z0) = 0, care reprezintă ecuaţia planului tangent la sferă în P0 ∈ (S). Deci într-un punct de pe sferă se poate duce un plan tangent la sferă în acel punct.Dacă se ţine cont de condiţia S(x0, y0, z0) = 0 şi ecuaţia (x0 – a)(x – x0) + (y0 – b) (y – y0) + (z0 – c) (z – z0) = 0 rezultă:
xx0 + yy0 + zz0 – a(x + x0) – b(y + y0) – c(z + z0) + d = 0, ecuaţia planului tangent la sferă în P0 ∈ (S), care se obţine prin dedublare din ecuaţia sferei.
Exemple 2 1. Se dă sfera: (S) : 4x2 + 4y2 + 4z2 – 8x + 16y – 12z + 13 = 0. Să se afle
coordonatele centrului şi raza sferei.
Soluţie: Se scrie ecuaţia carteziană generală a sferei împărţind ambii membri ai
ecuaţiei date la coeficientul lui x2: x2 + y2 + z2 – 2x + 4y – 3z + 4
13 = 0.Atunci
coordonatele centrului sferei sunt: a = 1, b = −2, c = 23 şi raza este dată de:
R2 = a2 + b2 + c2 – d,
=
413d , deci: 2
413
4941 =−++=R .
2. Se dau sfera: (S) : (x – 3)2 + (y – 2)2 + (z – 1)2 = 9 şi punctul M(1, 4, 2) pe sferă. Să se scrie ecuaţia planului tangent în M la sferă. Soluţie: Ecuaţia planului tangent la sferă într-un punct al sferei se obţine prin dedublare în acel punct din ecuaţia sferei. Astfel se obţine: (π) : −2(x – 3) + 2(y – 2)+ + 1(z – 1) – 9 = 0, sau: (π) : −2x + 2y + z – 8 = 0.
Determină punctele de intersecţie ale dreptei 56
22
11:)(
−−
=−
=− zyxd cu sfera
(S) : x2 + y2 + z2 – 2x - 4y – 6z + 5 = 0. R: A(1 , 2 , 6) ; B(2 , 4 , 1).
Să ne reamintim… xx0 + yy0 + zz0 – a(x + x0) – b(y + y0) – c(z + z0) + d = 0,
ecuaţia planului tangent la sferă în P0 ∈ (S), care se obţine prin dedublare din ecuaţia sferei.
IIII..33..33..33.. PPoozziiţţiiaa uunnuuii ppllaann ffaaţţăă ddee oo ssffeerrăă
Fie sfera (S) de centru C(a, b, c) şi rază R, iar planul (π) de ecuaţie: (π) : Ax + By + Cz + D = 0.
Poziţia planului (π) faţă de sfera (S) se studiază prin compararea distanţei de la centrul C al sferei la planul (π), cu raza R a sferei.
Dacă: 1. d(C, (π)) > R, rezultă că planul (π) este exterior sferei. 2. d(C, (π)) = R, rezultă că planul (π) este tangent sferei. 3. d(C, (π)) < R, rezultă că planul (π) este secant şi
taie sfera după un cerc real. În acest ultim caz, se Fig.3. determină centrul şi raza cercului de secţiune.
Dacă N (A, B, C) vectorul director al normalei (d)
C(a, b, c)
(π)
C1
R
N
r
M

65
la planul (π), se scriu ecuaţiile dreptei (d), care trece prin centrul sferei şi are direcţia dată de N
(fig. 3): (d) : C
czB
byA
ax −=
−=
− . La intersecţia dintre dreapta (d) şi planul (π) se află centrul, C1,
al cercului de secţiune. Raza cercului, r, se află din triunghiul dreptunghic determinat de centrul sferei, centrul cercului şi un punct oarecare M de pe cercul de secţiune şi anume:
))(,(22 πCdRr −= . Exemple 3
Se dau sfera:(S) : x2 + y2 + z2 – 6x + 2y – 2z – 5 = 0 şi planul:(π) :2x + y – 2z – 2 = 0. i)Să se arate că intersecţia planului cu sfera este un cerc real. ii)Să se scrie ecuaţiile acestui cerc. iii)Să se afle coordonatele centrului şi raza cercului. Soluţie: Un plan intersectează o sferă după un cerc real, dacă distanţa de la centrul sferei la plan este mai mică decât raza sferei. i) Centrul sferei este C(3, −1, 1) şi raza
R = 4. Rezultă d(C, (π)) = 31 . Întrucât d < R, planul (π) intersectează sfera (S) după
un cerc real: (C ). ii) Ecuaţiile cercului sunt date de sistemul format din ecuaţia sferei (S) şi a planului
(π), deci,
=−−+=−−+−++
.0222,05226
:)(222
zyxzyxzyx
C
iii) Centrul C’ al secţiunii făcute de plan în sferă este piciorul perpendicularei duse din C
pe planul (π). Cum (CC’) 21
11
23
−−
=+
=− zyx , intersectând cu planul, se găseşte:
C’
−
911,
910,
925 . Raza r a secţiunii este dată de: r2 = R2 – d2(C, (π)) = 16 –
91
=
9143
, r = 3143
.
Se dau sfera: (S) : 4x2 + 4y2 + 4z2 – 8x + 16y – 12z + 13 = 0 şi planul: (π) : x + y – -2z + 2 = 0. Determină poziţia planului (π) faţă de sfera (S) . R: planul (π) intersectează sfera (S) după un cerc real.
Să ne reamintim… Poziţia planului (π) faţă de sfera (S) se studiază prin compararea distanţei de la centrul C al sferei la planul (π), cu raza R a sferei. Dacă: 1. d(C, (π)) > R, rezultă că planul (π) este exterior sferei. 2. d(C, (π)) = R, rezultă că planul (π) este tangent sferei. 3. d(C, (π)) < R, rezultă că planul (π) este secant şi taie sfera după un cerc real.
IIII..33..33..44.. PPuutteerreeaa uunnuuii ppuunncctt ffaaţţăă ddee oo ssffeerrăă
Definiţia 3. Se numeşte puterea punctului P0(x0, y0, z0) în raport cu sfera (S), numărul: 20100)( )( MPMPPS ⋅= εP ,
unde M1 şi M2 sunt punctele de intersecţie ale dreptei ),( 0 ePd cu sfera (S), iar ε = –1 dacă
10MP şi 20MP au sensuri opuse (P0 interior sferei).
Prin trecere la norme în relaţia iMP0 eiρ= , i = 2,1 , unde ρ1, ρ2 reprezintă rădăcinile ecuaţiei ρ2 + 2ρ[(x0 – a)cos α + (y0 – b)cos β + (z0 – c)cos γ)] + S(x0, y0, z0) = 0, se obţine:
110 ρ=MP şi 220 ρ=MP , ( )1=e ,
astfel că:

66
21210(S) ρ ρερρε)(P ⋅=⋅⋅=P = ρ1 ⋅ ρ2 = S(x0, y0, z0). Se obţine astfel că puterea unui punct faţă de o sferă nu depinde de direcţia dreptei (d) ce
trece prin P0, ci numai de poziţia punctului P0 faţă de sferă. În concluzie, puterea punctului P0 faţă de sfera (S) este:
)(P0(S)P = S(x0, y0, z0), adică se obţine prin înlocuirea coordonatelor punctului în membrul întâi al ecuaţiei sferei.
Definiţia 4. Se numeşte plan radical a două sfere (S1) şi (S2), locul geometric al punctelor P din 3E , care au aceeaşi putere faţă de cele două sfere, adică: (P)(P) )(S)(S 21
PP = . Dacă P(x, y, z) este un punct al acestui loc geometric, atunci rezultă că: S1(x, y, z) = S2(x, y, z),
adică: (S1) – (S2) = 0,
care este ecuaţia planului radical al sferelor (S1) şi (S2). Din (S1) – (S2) = 0 se obţine ecuaţia carteziană generală a planului radical:
2(a1 – a2)x + 2(b1 – b2)y + 2(c1 – c2) + d1 – d2 = 0.
Observaţia 2. Se observă că vectorul 12CC are componentele: ((a1 – a2), (b1 – b2), (c1 – c2)), ceea ce arată că planul radical este perpendicular pe linia centrelor.
Definiţia 5. Se numeşte axă radicală a trei sfere (S1), (S2), (S3), locul geometric al punctelor P din 3E care au aceeaşi putere faţă de cele trei sfere, adică:
(P)(P)(P) )(S)(S)(S 321PPP == .
Dacă (S1) – (S2) = 0 este ecuaţia planului radical al sferelor (S1) şi (S2), iar (S2) – (S3) = 0, ecuaţia planului radical al sferelor (S2) şi (S3), atunci ecuaţia planului radical al sferelor (S1) şi (S3), adică: (S1) – (S3) = 0, trece prin dreapta de intersecţie a primelor două. Astfel că ecuaţiile axei radicale a celor trei sfere sunt:
=−=−
.0)()(,0)()(
32
21
SSSS
Poziţiile relative a două sfere (S1) şi (S2) se deduc din compararea distanţei dintre centrele celor două sfere, cu suma razelor lor.
Pentru două sfere care se intersectează după un cerc real, are sens să se vorbească de fascicol de sfere, adică de mulţimea sferelor care trec prin cercul de intersecţie a celor două sfere. Ecuaţia fascicolului de sfere este: (S1) + λ(S2) = 0, λ ∈ R .
Pentru două sfere care se intersectează, cercul de secţiune se află în planul radical al celor două sfere, deci ecuaţia fascicolului poate fi scrisă şi sub forma:
(S1) + λ((S1) − (S2)) = 0, λ ∈ R . Exemple 4
Se dau punctul A(0, 0, 1) şi sfera (S): x2 + y2 + z2:– 6x + 2y -2z – 5 = 0. Să se determine puterea punctului A faţă de sfera (S). Soluţie: (A)(S)P = S(0, 0, 1) = - 6.
Se dau sfera: (S) : x2 + y2 + z2 – 6x + 2y – 2z – 5 = 0 şi punctul A(9, 0, 0). Determină puterea punctului A faţă de sfera (S).
R: (A)(S)P = 22.
Să ne reamintim… Puterea punctului P0 faţă de sfera (S) : )(P0(S)P = S(x0, y0, z0). Ecuaţia planului radical al sferelor (S1) şi (S2:): (S1) – (S2) = 0. Ecuaţia fascicolului de sfere : (S1) + λ(S2) = 0, λ ∈ R .
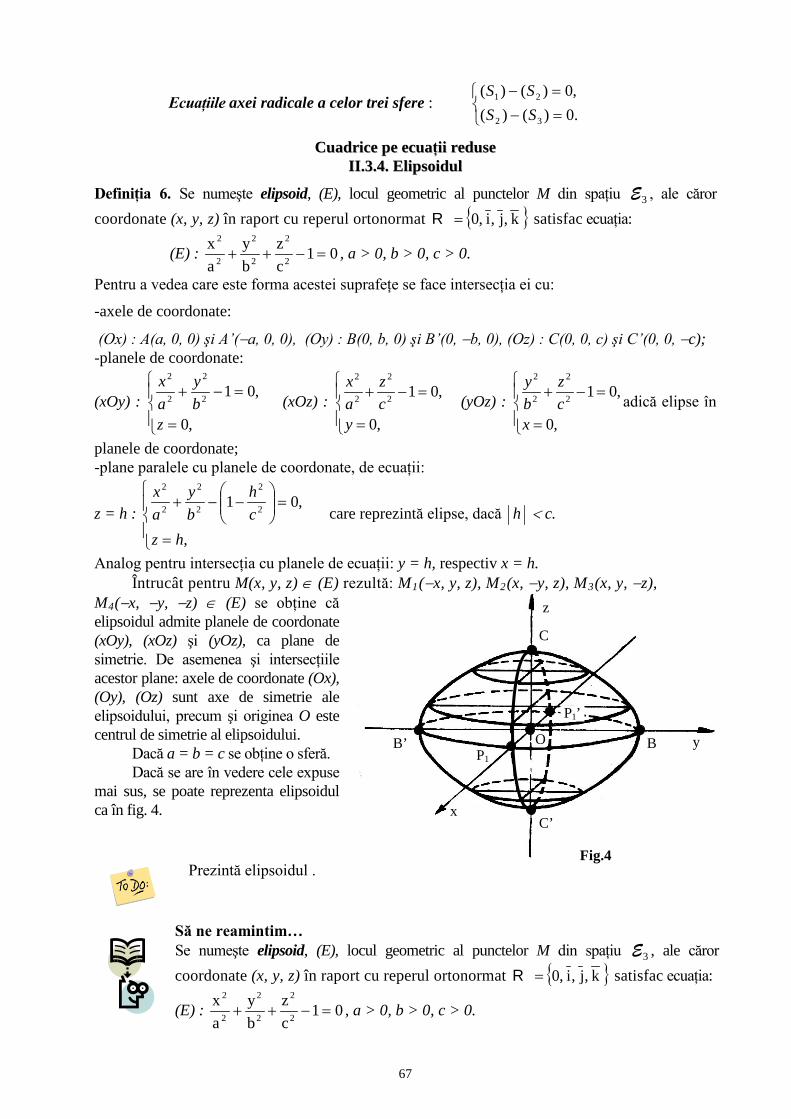
67
Ecuaţiile axei radicale a celor trei sfere :
=−=−
.0)()(,0)()(
32
21
SSSS
CCuuaaddrriiccee ppee eeccuuaaţţiiii rreedduussee
IIII..33..44.. EElliippssooiidduull
Definiţia 6. Se numeşte elipsoid, (E), locul geometric al punctelor M din spaţiu 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R satisfac ecuaţia:
(E) : 01cz
by
ax
2
2
2
2
2
2
=−++ , a > 0, b > 0, c > 0.
Pentru a vedea care este forma acestei suprafeţe se face intersecţia ei cu:
-axele de coordonate:
(Ox) : A(a, 0, 0) şi A’(−a, 0, 0), (Oy) : B(0, b, 0) şi B’(0, −b, 0), (Oz) : C(0, 0, c) şi C’(0, 0, −c); -planele de coordonate:
(xOy) :
=
=−+
,0
,012
2
2
2
zby
ax
(xOz) :
=
=−+
,0
,012
2
2
2
ycz
ax
(yOz) :
=
=−+
,0
,012
2
2
2
xcz
by
adică elipse în
planele de coordonate; -plane paralele cu planele de coordonate, de ecuaţii:
z = h :
=
=
−−+
,
,01 2
2
2
2
2
2
hzch
by
ax
care reprezintă elipse, dacă h < c.
Analog pentru intersecţia cu planele de ecuaţii: y = h, respectiv x = h. Întrucât pentru M(x, y, z) ∈ (E) rezultă: M1(−x, y, z), M2(x, −y, z), M3(x, y, −z),
M4(−x, −y, −z) ∈ (E) se obţine că elipsoidul admite planele de coordonate (xOy), (xOz) şi (yOz), ca plane de simetrie. De asemenea şi intersecţiile acestor plane: axele de coordonate (Ox), (Oy), (Oz) sunt axe de simetrie ale elipsoidului, precum şi originea O este centrul de simetrie al elipsoidului.
Dacă a = b = c se obţine o sferă. Dacă se are în vedere cele expuse
mai sus, se poate reprezenta elipsoidul ca în fig. 4.
Prezintă elipsoidul .
Să ne reamintim… Se numeşte elipsoid, (E), locul geometric al punctelor M din spaţiu 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R satisfac ecuaţia:
(E) : 01cz
by
ax
2
2
2
2
2
2
=−++ , a > 0, b > 0, c > 0.
z
C
C’ x
y B’ B P1
O
Fig.4
P1’
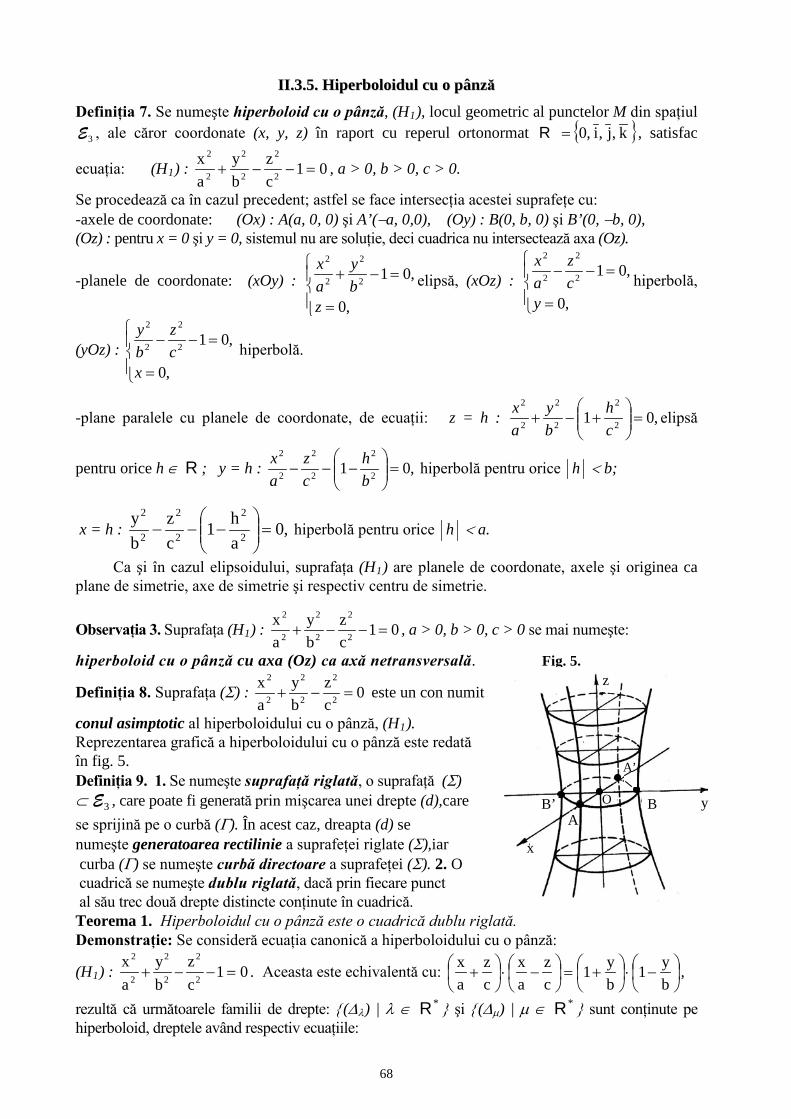
68
IIII..33..55.. HHiippeerrbboollooiidduull ccuu oo ppâânnzzăă
Definiţia 7. Se numeşte hiperboloid cu o pânză, (H1), locul geometric al punctelor M din spaţiul 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R , satisfac
ecuaţia: (H1) : 01cz
by
ax
2
2
2
2
2
2
=−−+ , a > 0, b > 0, c > 0.
Se procedează ca în cazul precedent; astfel se face intersecţia acestei suprafeţe cu: -axele de coordonate: (Ox) : A(a, 0, 0) şi A’(−a, 0,0), (Oy) : B(0, b, 0) şi B’(0, −b, 0), (Oz) : pentru x = 0 şi y = 0, sistemul nu are soluţie, deci cuadrica nu intersectează axa (Oz).
-planele de coordonate: (xOy) :
=
=−+
,0
,012
2
2
2
zby
ax
elipsă, (xOz) :
=
=−−
,0
,012
2
2
2
ycz
ax
hiperbolă,
(yOz) :
=
=−−
,0
,012
2
2
2
xcz
by
hiperbolă.
-plane paralele cu planele de coordonate, de ecuaţii: z = h : ,01 2
2
2
2
2
2
=
+−+
ch
by
ax elipsă
pentru orice h ∈ R ; y = h : ,01 2
2
2
2
2
2
=
−−−
bh
cz
ax hiperbolă pentru orice h < b;
x = h : ,0ah1
cz
by
2
2
2
2
2
2
=
−−− hiperbolă pentru orice h < a.
Ca şi în cazul elipsoidului, suprafaţa (H1) are planele de coordonate, axele şi originea ca plane de simetrie, axe de simetrie şi respectiv centru de simetrie.
Observaţia 3. Suprafaţa (H1) : 01cz
by
ax
2
2
2
2
2
2
=−−+ , a > 0, b > 0, c > 0 se mai numeşte:
hiperboloid cu o pânză cu axa (Oz) ca axă netransversală. Fig. 5.
Definiţia 8. Suprafaţa (Σ) : 0cz
by
ax
2
2
2
2
2
2
=−+ este un con numit
conul asimptotic al hiperboloidului cu o pânză, (H1). Reprezentarea grafică a hiperboloidului cu o pânză este redată în fig. 5. Definiţia 9. 1. Se numeşte suprafaţă riglată, o suprafaţă (Σ) ⊂ 3E , care poate fi generată prin mişcarea unei drepte (d),care se sprijină pe o curbă (Γ). În acest caz, dreapta (d) se numeşte generatoarea rectilinie a suprafeţei riglate (Σ),iar curba (Γ) se numeşte curbă directoare a suprafeţei (Σ). 2. O cuadrică se numeşte dublu riglată, dacă prin fiecare punct al său trec două drepte distincte conţinute în cuadrică. Teorema 1. Hiperboloidul cu o pânză este o cuadrică dublu riglată. Demonstraţie: Se consideră ecuaţia canonică a hiperboloidului cu o pânză:
(H1) : 01cz
by
ax
2
2
2
2
2
2
=−−+ . Aceasta este echivalentă cu:
−⋅
+=
−⋅
+
by1
by1
cz
ax
cz
ax ,
rezultă că următoarele familii de drepte: {(∆λ) | λ ∈ *R } şi {(∆µ) | µ ∈ *R } sunt conţinute pe hiperboloid, dreptele având respectiv ecuaţiile:
z
y B’ B
x
A’
O A

69
(∆λ) :
∈
−=−
+=+
*Rλ , by1
λ1
cz
ax
, by1 λ
cz
ax
şi (∆µ) :
∈
+=−
−=+
. , by11
cz
ax
, by1
cz
ax
*Rµµ
µ
Observaţia 4. Generatoarele distincte care trec printr-un punct al hiperboloidului cu o pânză, determină planul tangent la suprafaţă în acel punct.
Propoziţia 1. Prin fiecare punct al hiperboloidului (H1) trece o generatoare şi numai una din fiecare din cele două familii de generatoare: (∆λ) şi (∆µ). Consecinţa 1. Două generatoare din aceeaşi familie nu se întâlnesc (sunt necoplanare).
Propoziţia 2. Orice generatoare din familia (∆λ) întâlneşte toate generatoarele din familia (∆µ) şi reciproc. Pentru demonstraţii a se consulta [7]-pag.183.
Exemple 5
Să se determine generatoarele rectilinii ale cuadricei: (H1) : x2 − 4
2y + 9
2z − 1 = 0
conţinute în planul: (π) : 6x + 3y – 2z + 6 = 0.
Soluţie: Ecuaţiile familiilor de generatoare rectilinii ale cuadricei date sunt:
∈
−=−
+=+
∆*Rλ ,
311
2
,3
12
:)(zyx
zyx
λ
λ
λ şi
∈
+=−
−=+
∆. ,
311
2
,3
12
:)(*Rµ
µ
µ
µ zyx
zyx
Din ecuaţiile familiei de generatoare rectilinii (∆λ), împreună cu ecuaţia planului se formează un sistem liniar, neomogen, de trei ecuaţii cu trei necunoscute, care trebuie să fie compatibil nedeterminat. Prin urmare, determinantul său caracteristic trebuie să fie nul. Se
obţine condiţia: 0
23631
211
3211
=
−
−
−
λ
λ
Det , de unde rezultă λ = −1.
Ecuaţiile generatoarei rectilinii căutate sunt:
=+−−=+++
∆.06236,06236
:)(zyxzyx
λ
Analog se determină o generatoare din familia (∆µ).
Determină generatoarele rectilinii ale cuadricei: (H1) : x2 − 4
2y + 9
2z − 1 = 0 , care
trec prin A(1 , 0 , 0) . R:
−=−
+=+
∆,
31
2
,3
12
:)(zyx
zyx
Aλ şi
+=−
−=+
∆.
31
2
,3
12
:)(zyx
zyx
Aµ

70
Să ne reamintim… Se numeşte hiperboloid cu o pânză, (H1), locul geometric al punctelor M din spaţiul
3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R ,
satisfac ecuaţia: (H1) : 01cz
by
ax
2
2
2
2
2
2
=−−+ , a > 0, b > 0, c > 0.
IIII..33..66.. HHiippeerrbboollooiidduull ccuu ddoouuăă ppâânnzzee
Definiţia 10. Se numeşte hiperboloid cu două pânze, (H2), locul geometric al punctelor M din spaţiul 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R satisfac ecuaţia:
(H2) : 01cz
by
ax
2
2
2
2
2
2
=+−+ , a > 0, b > 0, c > 0.
Dacă se consideră în mod asemănător, intersecţiile hiperboloidului cu două pânze cu axele de coordonate şi planele de coordonate, se observă că acesta are numai două vârfuri, nu taie planul (xOy), iar intersecţiile lui cu planele (xOz), (yOz) sunt hiperbole. -Intersecţiile suprafeţei (H2) cu plane paralele cu planul (xOy), sunt:
=
=
−−+
.h z
0,1ch
by
ax
2
2
2
2
2
2
Pentru h > c se obţin elipse.
-Intersecţiile suprafeţei (H2) cu planele de ecuaţii x = h şi respectiv y = h sunt hiperbole. Fig. 6. Această suprafaţă are aceleaşi simetrii ca şi hiperboloidul cu o pânză.
Definiţia 11. 0cz
by
ax
2
2
2
2
2
2
=−+ este un con, numit conul asimptotic
al hiperboloidului cu două pânze(H2). Hiperboloidul cu două pânze are următoarea reprezentare grafică (fig.6).
Prezintă hiperboloidul cu două pânze.
Să ne reamintim… Se numeşte hiperboloid cu două pânze, (H2), locul geometric al punctelor M din spaţiul 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat
{ }k ,j ,i ,0=R satisfac ecuaţia: (H2) : 01cz
by
ax
2
2
2
2
2
2
=+−+ , a > 0, b > 0, c > 0.
IIII..33..77.. PPaarraabboollooiidduull eelliippttiicc
Definiţia 12. Se numeşte paraboloid eliptic, (PE) locul geometric al punctelor M din spaţiul 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R , satisfac ecuaţia:
(PE) : pz 2by
ax
2
2
2
2
=+ , p > 0, a > 0, b > 0. Fig. 7.
-Intersecţia paraboloidului eliptic cu planul (yOz) şi respectiv (xOz) este parabola:
=
=
pz, 2by
0,x
2
2 şi respectiv parabola:
=
=
. pz 2ax
0,y
2
2
z
y
x
C
C’
O
y
x
O
z

71
-Intersecţiile suprafeţei (PE) cu planele de ecuaţii z = h > 0, sunt elipse, iar cu planele de ecuaţii: x = h, respectiv y = h sunt parabole. Din forma ecuaţiei rezultă că planele (xOz) şi (yOz) sunt plane de simetrie, iar axa (Oz), axă de simetrie. Paraboloidul eliptic are următoarea reprezentare grafică (fig. 7).
Prezintă paraboloidul eliptic .
Să ne reamintim… Se numeşte paraboloid eliptic, (PE) locul geometric al punctelor M din spaţiul 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R , satisfac
ecuaţia: (PE) : pz 2by
ax
2
2
2
2
=+ , p > 0, a > 0, b > 0.
IIII..33..88.. PPaarraabboollooiidduull hhiippeerrbboolliicc
Definiţia 13. Se numeşte paraboloid hiperbolic sau şa, (PH), locul geometric al punctelor M din spaţiul 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R satisfac
ecuaţia: (PH) : pz 2by
ax
2
2
2
2
=− , p > 0, a > 0, b > 0.
-Intersecţia cu planul (xOy) sunt dreptele:
=
=−
0,z
,0ax
by
şi
=
=+
0.z
,0ax
by
-Intersecţiile cu plane paralele cu (xOy) de ecuaţii z = h, h ∈ *R sunt hiperbolele:
=
=−−
.z
,02ax
2
2
2
2
h
phby
-Intersecţiile lui (PH) cu planele (xOz) şi (yOz) sunt respectiv parabolele:
=
=
2
2
ax2
0,y
pz şi
=
=
.by2
0,x
2
2
pz
-Intersecţiile suprafeţei (PH) cu plane paralele cu planul (yOz), de ecuaţii x = h, h ∈ *R , sunt
parabolele:
∈−=
=
.,ah2
,x
*2
2
2
2
Rhbypz
h
-Intersecţiile cu plane paralele cu planul (xOz), de ecuaţii y = h, h ∈ *R , sunt parabolele:
∈−=
=
.,ax2
,y
*2
2
2
2
Rhbhpz
h
Paraboloidul hiperbolic este simetric faţă de (xOz), (yOz) şi axa (Oz). Paraboloidul hiperbolic are următoarea reprezentare grafică (fig. 8).
Fie (PH) : pz 2by
ax
2
2
2
2
=− un paraboloid hiperbolic.
Ca şi în cazul hiperboloidului cu o pânză, se obţine:
y
x
O
Fig. 8.
z
72
Definiţia 14. Familiile de drepte: (∆λ) :
∈=−
=+
*Rλ ,λ1
by
ax
, z 2by
ax λ
şi (∆µ) :
=+
=−
,1by
ax
, 2by
ax
µ
µz
*R∈µ , se numesc generatoarele rectilinii ale paraboloidului hiperbolic.
În concluzie şi paraboloidul hiperbolic este o cuadrică dublu riglată, deoarece prin fiecare punct al său trec două drepte distincte, conţinute pe cuadrică.
Observaţia 5. Rezultatele propoziţiilor 1 şi 2 demonstrate în cazul hiperboloidului cu o pânză, rămân valabile şi în cazul paraboloidului hiperbolic.
Prezintă paraboloidul hiperbolic.
Să ne reamintim… Se numeşte paraboloid hiperbolic sau şa, (PH), locul geometric al punctelor M din spaţiul 3E , ale căror coordonate (x, y, z) în raport cu reperul ortonormat { }k ,j ,i ,0=R
satisfac ecuaţia: (PH) : pz 2by
ax
2
2
2
2
=− , p > 0, a > 0, b > 0.
IIII..33..99.. Rezumat În cadrul acestei unităţi de învăţare se prezintă rezultate referitoare la cuadrice Din această mulţime, pe ecuaţie generală se studiază sfera. Astfel se analizează: intersecţia unei sfere cu o dreaptă şi poziţia unui plan faţă de o sferă. Se prezintă de asemenea noţiunile de: putere a unui punct faţă de o sferă, plan radical a două sfere şi axă radicală a trei sfere. Studiul celorlalte cuadrice prezente în teorie: elipsoidul, hiperboloidul cu o pânză, hiperboloidul cu două pânze, paraboloidul eliptic şi paraboloidul hiperbolic este făcut pe ecuaţii canonice, urmărindu-se în esenţă pentru fiecare cuadrică în parte, următoarele probleme: definirea cuadricei, determinarea intersecţiilor acesteia cu axele de coordonate, cu planele de coordonate, cu plane paralele cu planele de coordonate, stabilirea eventualelor simetrii ale cuadricei, a ecuaţiilor familiilor de generatoare rectilinii pentru cuadricele dublu reglate şi reprezentarea grafică a fiecărei cuadrice.
IIII..33..1100.. Test de autoevaluare a cunoştinţelor 1.Scrie cel puţin trei ecuaţii ale sferei. 2.Scrie ecuaţia planului tangent la sfera (S): (x-a)2 + (y-b)2 + (z-c)2 – R2 = 0 într-un punct P0(x0,y0,z0) situat pe sferă. 3.Defineşte conceptele de: putere a unui punct faţă de o sferă, plan radical a două sfere, axă radicală a trei sfere. 4.Caracterizează: i) poziţiile relative ale unei drepte faţă de o sferă; ii) poziţiile relative ale unui plan faţă de o sferă. 5.Defineşte şi exemplifică noţiunile de : cuadrică şi cuadrică dublu riglată . 6.Scrie ecuaţia sferei cu centrul C(−2, 1,−3) tangentă la planul(π): 3x – 4y + 1 = 0.
IIII..33..1111.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree 11..RReevveezzii IIII..33..33..11..--..EEccuuaaţţiiiillee ssffeerreeii..22..RReevveezzii IIII..33..33..22..-- EEccuuaaţţiiaa ppllaannuulluuii ttaannggeenntt llaa ssffeerrăă îînn P0 ∈ (S).33..RReevveezzii IIII..33..33..44..-- PPuutteerreeaa uunnuuii ppuunncctt ffaaţţăă ddee oo ssffeerrăă .. 44..ii)) RReevveezzii IIII..33..33..22..-- ccaazzuurriillee:: 11)),, 22)),, 33));; iiii)) RReevveezzii IIII..33..33..33..-- ccaazzuurriillee:: 11)),, 22)),, 33));; 5.Revezi definiţia 1 şi definiţia 9-2 . 6.(S) : 25x2 + 25y2 + 25z2 + 100x – 50y + 150z + 269 = 0.
73
Unitatea de învăţare II.4. Generări de suprafeţe
Cuprins II.4.1. Introducere .................................................................................................................... 73
II.4.2. Competenţe ................................................................................................................... 73 IIII..44..33.. SSuupprraaffeeţţee cciilliinnddrriiccee .............................................................................................................................................................................................................. 7744 IIII..44..44.. SSuupprraaffeeţţee ccoonniiccee ........................................................................................................................................................................................................................ 7755 IIII..44..55.. SSuupprraaffeeţţee ddee rroottaaţţiiee .............................................................................................................................................................................................................. 7766
IIII..44..66.. Rezumat ................................................................................................................................................................................................................................................ 7788 IIII..44..77.. Test de autoevaluare a cunoştinţelor .......................................................................................................................................................... 7788 IIII..44..88.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ....................................................... 78
II.4.1. Introducere În cadrul acestei unităţi de învăţare se face o scurtă introducere în definirea unei curbe în spaţiu şi a unei suprafeţe, şi apoi se deduc ecuaţiile carteziene ale suprafeţelor: cilindrice, conice şi de rotaţie . Acestea vor fi obţinute prin deplasarea condiţionată geometric a unei drepte din spaţiu, respectiv a unei curbe din spaţiu.
II.4.2. Competenţele unităţii de învăţare După parcurgerea materialului studentul va fi capabil:
-să prezinte şi să exemplifice noţiunile de: suprafaţă cilindrică, suprafaţă conică, şi suprafaţă de rotaţie; -să determine ecuaţiile acestor clase de suprafeţe; -să decidă dacă o ecuaţie dată este ecuaţia unei suprafeţe cilindrice, conice, sau de rotaţie.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
GGeenneerraarreeaa ssuupprraaffeeţţeelloorr
Prin suprafaţă dată implicit, se înţelege locul geometric al punctelor M din spaţiul 3E , ale
căror coordonate (x, y, z), în raport cu reperul ortonormat R = {O, i , j , k }, satisfac o ecuaţie de forma: F(x, y, z) = 0.
Prin curbă în spaţiu dată implicit, se înţelege locul geometric al punctelor M din spaţiul 3E ale
căror coordonate (x, y, z), în raport cu reperul ortonormat R = {O, i , j , k }, satisfac sistemul:
==
,0),,(,0),,(
zyxGzyxF
adică o curbă în spaţiu este dată ca intersecţie a două suprafeţe. Se poate vorbi de familii de suprafeţe sau familii de curbe în spaţiu. Ecuaţia F(x, y, z,λ ) = 0, λ ∈ R , reprezintă o familie de suprafeţe, depinzând de un
parametru, iar sistemul:
∈==
,,,0),,,(,0),,,(
Rµλµλ
zyxGzyxF
reprezintă o familie de curbe în spaţiu, depinzând de doi parametri, etc. Dacă unei familii de curbe în spaţiu i se impune o condiţie suplimentară pentru parametrii

74
λ şi µ, de exemplu: Φ(λ, µ) = 0, atunci din sistemul:
∈=Φ==
,,,0),(,0),,,(,0),,,(
Rµλµλµλ
zyxGzyxF
prin eliminarea parametrilor λ şi µ, se obţine: Ψ(x, y, z) = 0, adică o suprafaţă.
II.4.33.. SSuupprraaffeeţţee cciilliinnddrriiccee
Definiţia 1. Se numeşte suprafaţă cilindrică, suprafaţa generată prin mişcarea unei drepte, numită generatoare, care rămâne paralelă cu o dreaptă dată şi se sprijină pe o curbă dată, numită curbă directoare a suprafeţei (fig. 1.).
Se consideră dreapta (d) de ecuaţii: (d) :
==
,(Q) (P)
00
Fig. 1.
dată ca intersecţie a două plane.Fie curba (C) dată ca inter-
secţie a două suprafeţe: (C) :
==
.0),,(,0),,(
zyxGzyxF
Dreptele generatoare (∆.λ, µ), paralele cu dreapta (d), se obţin ca intersecţii a două familii de
plane, paralele cu planele (P) şi (Q): (∆.λ, µ) :
∈==
.,,
Rµλµλ
,(Q)(P)
Condiţia ca aceste drepte să se
sprijine pe curba (C) este ca sistemul:
====
,0)(,0)(
,
GF
,(Q)(P)
µλ
să aibă soluţii.
Sistemul este subdimensionat, are patru ecuaţii şi x, y, z, λ, µ necunoscute, deci în general este compatibil. Dacă se elimină x, y, z din cele patru ecuaţii, se obţine o singură ecuaţie în λ şi µ: Φ(λ, µ) = 0, numită condiţie de sprijin (sau condiţie de compatibilitate a sistemului).
Dacă se înlocuiesc λ şi µ din ecuaţiile generatoarelor, (∆ λ,µ) în această condiţie, adică (S) : Φ((P), (Q)) = 0 se obţine ecuaţia suprafeţei cilindrice.
Observaţia 1. Dacă este dată numai direcţia dreptei (d), adică vectorul ei director: v (l, m, n), atunci ţinând cont că toate dreptele din spaţiu paralele cu această direcţie taie cel puţin unul din planele de coordonate, se pot scrie ecuaţiile generatoarelor luând puncte din unul din aceste plane, dacă direcţia
nu este paralelă cu el: (∆.λ, µ) : nz
mμy
lλx
=−
=− , aici fiind luat un punct M(λ, µ, 0), λ, µ ∈ R din
planul (xOy). Astfel ecuaţiile generatoarelor se mai pot scrie: (∆.λ, µ) :
∈=−
=−
.,
,
Rµλµ
λ
z,nmy
znlx
Caz particular: Să se scrie ecuaţia suprafeţei cilindrice cu generatoarele paralele cu axa (Oz) şi
curba directoare (C):
==
0.(G)0,(F)
Axa (Oz) are ecuaţiile: (Oz):
==
0,y0,x
deci (∆.λ, µ) :
==
,y,x
µλ
R∈μλ, , iar ecuaţia suprafeţei cilindrice cu generatoarele paralele cu (Oz) este Φ(x, y) = 0, ecuaţie în care lipseşte necunoscuta z. În mod analog se obţin ecuaţiile suprafeţelor cilindrice cu generatoarele paralele cu axele (Ox) şi respectiv (Oy).
(C)
(d)

75
Exemple 1 Să se determine ecuaţia suprafeţei cilindrice ale cărei generatoare sunt paralele cu dreapta:
=++=++
,032,0
:)(zyx
zyxd şi are curba directoare:
==−++
.0,0
:)(222
yzzyx
C
Soluţie: Ecuaţiile generatoarelor paralele cu dreapta dată sunt:
(∆.λ, µ) :
∈=++=++
.,32,
Rµλµλ
,zyxzyx
Condiţia ca aceste drepte să se sprijine pe curba
(C) este ca următorul sistem să aibă soluţii:
==−++
=++=++
.0,0
,32,
222
yzzyx
zyxzyx
µλ
Prin eliminarea
necunoscutelor x, y, z din cele patru ecuaţii, se obţine condiţia de sprijin sau de compatibilitate: (3λ − µ)2 + (λ − µ)2 + 2(λ − µ) = 0,de unde se obţine ecuaţia suprafeţei cilindrice căutate: (S) : 2x2 + y2 + 2z2 + 2xy + 2yz – y – 2z = 0.
Determină ecuaţia suprafeţei cilindrice (S), având generatoarele paralele cu
dreapta (d):11
321
−+
==− zyx şi care se sprijină pe curba
∈==
. ,0,
:)(2
Razaxy
C
R:(S): (x + 2z)(y + 3z) = a2.
Să ne reamintim…
Dreptele generatoare: (∆.λ, µ) :
∈==
.,,
Rµλµλ
,(Q)(P)
Ecuaţia suprafeţei cilindrice: (S) : Φ((P), (Q)) = 0.
IIII..44..44.. SSuupprraaffeeţţee ccoonniiccee
Definiţia 2. Se numeşte suprafaţă conică, suprafaţa generată prin mişcarea unei drepte, numită generatoare, care trece printr-un punct fix, numit vârf şi se sprijină pe o curbă dată, numită curbă directoare (fig. 2).
Fie V punctul fix. Se poate presupune că V este obţinut ca intersecţie a trei plane (eventual paralele cu planele de coordonate), adică:
V :
===
,0)(0,0
R,(Q)
(P) respectiv, dacă V(x0, y0, z0), atunci:
−≡−≡−≡
. 0=zz(R) 0,=yy(Q) 0,=xx(P)
0
0
0
Toate dreptele care trec prin V pot fi obţinute prin intersec-
tarea fascicolelor de plane:(∆.λ, µ) :
∈==
.,)()(),()(
Rµλµλ
,RQRP
Fie (C) curba directoare, de ecuaţii:(C) :
==
.0),,(,0),,(
zyxGzyxF
Condiţia ca dreptele generatoare (∆.λ, µ) să se sprijine pe curba directoare (C), este ca
sistemul:
====
,(G),(F)μ(R),(Q)λ(R),(P)
00 să fie compatibil. În mod analog cu cazul suprafeţelor cilindrice, prin
Fig. 2.
(C)
V

76
eliminarea lui x, y, z din acest sistem, se obţine condiţia de sprijin: Φ(λ, µ) = 0. Dacă se înlocuiesc pe λ şi µ din ecuaţiile generatoarelor (∆.λ, µ), se obţine ecuaţia suprafeţei conice:
(S) : 0=
Φ
(R)(Q),
(R)(P) .
Observaţia 2. Dacă se ţine cont de faptul că dintre cei trei parametri directori ai unei direcţii din spaţiu, sunt esenţiali doar doi, o direcţie oarecare poate avea componentele (λ, µ, 1) şi atunci, dacă vârful este dat prin coordonatele lui, adică: V(x0, y0, z0), dreptele generatoare au ecuaţiile: (∆.λ, µ) :
1000 zzyyxx −
=−
=−
µλ, R∈μλ, , adică: (∆.λ, µ) :
∈−=−−=−
.,)(),(
00
00
Rµλµλ
,zzyyzzxx
Exemple 2 Să se determine ecuaţia suprafeţei conice cu vârful în V(1, 2, 0) şi având curba directoare:
==−+
.0,04
:)(22
yzx
C
Soluţie: Vârful V se află la intersecţia planelor: (π1) : x – 1 = 0, (π2) : y – 2 = 0, (π3) : z = 0. Ecuaţiile generatoarelor ce trec prin V sunt:
(∆.λ, µ) :
∈=−−=−−−
.,,0)2(,0)2()1(
Rµλµλ
yzyx
Condiţia ca aceste drepte să se sprijine pe
curba (C) este ca următorul sistem să fie compatibil:
==−+
=−−=−−−
.0,04,0)2(
,0)2()1(
22
yzx
yzyx
µλ
Prin eliminarea necunoscutelor x, y, z între cele patru ecuaţii,
se obţine condiţia de sprijin sau de compatibilitate: (1 – 2λ)2 + 4µ2 − 4 = 0. Eliminând parametrii λ şi µ între condiţia de sprijin şi ecuaţiile generatoarelor,
se obţine ecuaţia suprafeţei conice: (S) : (y – 2x)2 + 4z2 – 4(y – 2)2 = 0, sau:(S) : 4x2 – 3y2 + 4z2 – 4xy + 16y – 16 = 0.
Scrie ecuaţia suprafeţei conice (S) cu vârful în V, dat de intersecţia planelor (π1) : x + 3z - 10 = 0, (π2) : y - 2 = 0, (π3) : x - z + 2 = 0 şi care are drept curbă
directoare curba
==−+
.0,02
:)(22
yxzx
C
R: (S): (y –2x)2 + (3y – 2x)2 – (3y - 2z)(y – 2) = 0.
Să ne reamintim…
Dreptele generatoare: (∆.λ, µ) :
∈==
.,)()(),()(
Rµλµλ
,RQRP
Ecuaţia suprafeţei conice: (S) : 0=
Φ
(R)(Q),
(R)(P) .
IIII..44..55.. SSuupprraaffeeţţee ddee rroottaaţţiiee
Definiţia 3. Se numeşte suprafaţă de rotaţie, suprafaţa generată prin rotirea (fără alunecare) a unei curbe (C) în jurul unei drepte fixe (d), numită axă de rotaţie.
Se observă că fiecare punct al curbei (C) descrie un cerc (C ) cu centrul O1 pe dreapta (d), având planul perpendicular pe axa de rotaţie (fig. 3).
(C λ,µ)
(C)
M0
axa
(d)
Fig. 3.
O1

77
Deci, se poate spune că suprafaţa de rotaţie este suprafaţa
generată de cercuri, cu centrele pe axa de rotaţie, (d), de rază variabilă, având planul perpendicular pe axă şi care se sprijină pe curba (C).Fie axa de rotaţie:
(d) : n
zzm
yylxx 000 −
=−
=− , şi curba dată (C), de ecuaţii: (C) :
==
.0),,(,0),,(
zyxGzyxF
Cercurile generatoare se obţin dacă se intersectează sfere cu centrul în M0(x0, y0, z0) şi rază variabilă, cu plane paralele între ele şi perpendiculare pe axa de rotaţie:
(C λ, µ) :
∈∈=++=−+−+−
.,)()( 22
02
02
0
R*R µλµλ
,,nzmylxzz)y(yxx
Dacă se impune condiţia ca aceste cercuri să se sprijine pe curba dată (C), din sistemul format de ecuaţiile cercurilor generatoare şi ecuaţiile curbei (C), se obţine condiţia de sprijin:
Φ(λ2, µ) = 0. Prin înlocuirea lui λ2 şi a lui µ din ecuaţiile generatoarelor, se obţine:
[ ] ,0,)()(:)( 20
20
20 =++−+−+−Φ n zm ylxzz)y(yxxS
care reprezintă ecuaţia suprafeţei de rotaţie.
Observaţia 3. Se observă că ecuaţia unei suprafeţe de rotaţie este o funcţie: Φ((S), (P)) = 0 unde (S) = 0, (P) = 0 sunt respectiv ecuaţia unei sfere şi a unui plan.
Exemple 3 xy + xz + yz = 0 este ecuaţia unui con de rotaţie, deoarece se poate scrie: (x + y + z)2 – (x2 + y2 + z2) = 0.
Exemple 4 Să se determine ecuaţia suprafeţei care se obţine prin rotirea curbei:
=++=−+−
,03,052
:)(222
zxzyx
C în jurul axei: (d) : x = y = z.
Soluţie: Cercurile generatoare (C λ, µ) rezultă la intersecţia unor plane normale pe dreapta (d) cu sfere cu centrul situat pe axa (d) şi de rază variabilă:
(C λ, µ) :
∈∈=++
=++
.,,,
*
2222
RR µλµ
λ
zyxzyx
Dacă se impune condiţia ca aceste cercuri generatoare să se sprijine pe curba directoare
(C), se obţine sistemul compatibil:
=++=−+−
=++=++
.03,052
,,
222
2222
zxzyx
zyxzyxµ
λ
Prin eliminarea necunoscutelor x, y, z din cele patru ecuaţii se obţine condiţia de sprijin: λ2 – 3(µ + 3)2 – 5 = 0. Eliminând λ şi µ între ultima relaţie şi ecuaţiile cercurilor generatoare se obţine ecuaţia suprafeţei de rotaţie căutate: (S) : x2 + y2 + z2 – 3(x + y + z + 3)2 – 5 = 0.

78
Scrie ecuaţia suprafeţei (S) generată de rotirea hiperbolei ( )
=
=−−
0,z
,01by
ax
: 2
2
2
2
C în
jurul axei (Ox). R: (S): 01b
zyax
2
22
2
2
=−+
− .
Să ne reamintim…
Cercurile generatoare: (C λ, µ) :
∈∈=++=−+−+−
.,)()( 22
02
02
0
R*R µλµλ
,,nzmylxzz)y(yxx
Ecuaţia suprafeţei de rotaţie:
[ ] 0,)()(:)( 20
20
20 =++−+−+−Φ n zm ylxzz)y(yxxS .
IIII..44..66.. Rezumat În cadrul acestei unităţi de învăţare se prezintă rezultate referitoare la modul de determinare a ecuaţiilor: suprafeţelor cilindrice, suprafeţelor conice, suprafeţelor conoide cu plan director şi suprafeţelor de rotaţie. Se defineşte fiecare dintre suprafeţele enumerate mai sus, iar determinarea ecuaţiilor acestora se face după un algoritm în trei paşi: scrierea ecuaţiilor generatoarelor, determinarea condiţiei de sprijin şi găsirea ecuaţiei suprafeţei respective.
IIII..44..77.. Test de autoevaluare a cunoştinţelor 1. Completează definiţia: Se numeşte suprafaţă cilindrică … 2. Completează definiţia: Se numeşte suprafaţă conică … 3. Completează definiţia: Se numeşte suprafaţă de rotaţie … 4. Determină ecuaţia suprafeţei cilindrice ale cărei generatoare sunt paralele cu
dreapta: zyxd ==:)( şi are curba directoare:
==
.0,
:)(2
zyx
C
5. Determină ecuaţia suprafeţei conice cu vârful în V(1, 1, 1) şi având curba
directoare:
==−+
.0,04
:)(22
zyx
C
6. Scrie ecuaţia suprafeţei care se obţine prin rotirea hiperbolei
=
=−−
,0
,01:)( 2
2
2
2
zby
ax
C în jurul axei (Oy).
IIII..44..88.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree 11..RReevveezzii ddeeffiinniiţţiiaa 11.. 22..RReevveezzii ddeeffiinniiţţiiaa 22.. 33..RReevveezzii ddeeffiinniiţţiiaa 44.. 4.Revezi Exemple 1. (S) : (y – z)2 = x - z . 5.Revezi Exemple 2. (S): (z –x)2 + (z– y)2 – 4(z - 1) 2 = 0.
6.Revezi Exemple 4. (S): 01by
ax
2
2
2
22
=−−+ z .

79
Temă de control 2 – Geometrie analitică
11.. Scrie ecuaţia unui plan: i) paralel cu planul (xOy) şi care trece prin punctul A(2, −5, 3); ii) care trece prin axa (Oz) şi prin punctul B(−8, 1, 2); iii) paralel cu (Ox), care trece prin punctele C1(4, 0, 0) şi C2(7, 2, 1); iv) care conţine punctele necoliniare D(1,0,1), E(0,1,0),
F(0,1,1); v) care conţine punctul G(0,1,2) şi are vectorul normal .2−−−−
+−= kjiN 22.. Află simetricul A’ al punctului A(1, 3, 0) faţă de planul (π) : x + 2y –2 z + 3 = 0.
33.. DDeetteerrmmiinnăă ssiimmeettrriiccuull BB’’ aall ppuunnccttuulluuii BB((− 11,,11,,22)) ffaaţţăă ddee ddrreeaappttaa ((dd)) :: 2x
== 1
zy − ==
21+z
44.. i) Stabileşte natura, genul şi centrul conicei: (Γ): 5x2 + 8xy + 5y2 – 18x – 18y + 9 = 0. ii) Redu la forma canonică şi reprezintă grafic conica (Γ).
5. Se dau punctele: A(-1,1,2), B(1,3,3), C(0,2,5). Scrie: i) ecuaţia sferei (S) cu centrul în punctul A şi care trece prin punctul B; ii) ecuaţia planului tangent în punctul C la sfera (S), determinată la punctul i). 6. Recunoaşte cuadricele şi desenează-le grafic:
4x2 + 6y2 + 9z2 −36 = 0, x2 + y2 = z 4x2 + 6y2 − 9z2 +36 = 0, y2 − x2 = z
7. Să se scrie ecuaţia conului cu vârful în origine şi curba directoare: { 2x = y, x + y + z – 1 = }0
8. Scrie ecuaţia suprafeţelor care se obţin prin rotirea curbei
==0
:)(x
ez y
C în jurul axei
(Oy) şi în jurul axei (Oz)
După rezolvare, tema de control trebuie transmisă tutorelui, pe foi scrise de mână, îndosariate.
Sugestii pentru acordarea punctajului • Oficiu: 10 puncte; • Subiectul 1: 15 puncte; • Subiectul 2: 10 puncte; • Subiectul 3: 10 puncte; • Subiectul 4: 15 puncte; • Subiectul 5: 10 puncte; • Subiectul 6: 10 puncte; • Subiectul 7: 10 puncte; • Subiectul 8: 10 puncte.
80
MMOODDUULLUULL IIIIII.. GGeeoommeettrriiee ddiiffeerreennţţiiaallăă
Cuprins Introducere .............................................................................................................................. 80 Competenţe ............................................................................................................................. 80
UUII IIIIII..11.. Elemente de geometrie diferenţială a curbelor plane .............................................................................................. 8811 UUII IIIIII..22.. Elemente de geometrie diferenţială a curbelor în spaţiu .................................................................................... 9966 UUII IIIIII..33.. Elemente de geometrie diferenţială a suprafeţelor .................................................................................................. 111155 Temă de control 3-Geometrie diferenţială ........................................................................... 128
Introducere Obiectul geometriei diferenţiale îl constituie studiul proprietăţilor curbelor şi suprafeţelor, precum şi al altor entităţi geometrice, cu ajutorul analizei matematice, în special al calculului diferenţial. În modulul de faţă se prezintă rezultate clasice din geometria euclidiană a curbelor plane, a curbelor în spaţiu şi a suprafeţelor, anume acele proprietăţi ale curbelor şi suprafeţelor, precum şi acele mărimi ce li se pot asocia, care sunt invariante faţă de grupul de transformări ortogonale ale spaţiului euclidian. Unele cunoştinţe dobândite în modulele dedicate algebrei liniare şi geometriei analitice îşi găsesc aplicaţii în cadrul acestui modul.
Competenţe După parcurgerea materialului studentul va fi capabil:
-să identifice, să definească, să caracterizeze şi să exemplifice principalele noţiuni teoretice referitoare la geometria diferenţială a curbelor plane, a curbelor în spaţiu şi a suprafeţelor ; -să utilizeze în exerciţii principalele rezultate referitoare la geometria diferenţială a curbelor plane, a curbelor în spaţiu şi a suprafeţelor.
81
Unitatea de învăţare III.1. Elemente de geometrie diferenţială a curbelor plane
Cuprins IIIIII..11..11.. IInnttrroodduucceerree .................................................................................................................................................................................................................................... 8811 IIIIII..11..22.. Competenţe .................................................................................................................. 81 IIIIII..11..33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa ccuurrbbeelloorr ppllaannee .......................................................................................................................................... 8822 IIIIII..11..44.. TTaannggeennttaa şşii nnoorrmmaallaa llaa oo ccuurrbbăă ppllaannăă îînnttrr--uunn ppuunncctt oorrddiinnaarr ..................................................................................................8833 IIIIII..11..55.. Lungimea unui arc de curbă plană. Elementul de arc ............................................................85 IIIIII..11..66.. CCoonnttaaccttuull aa ddoouuăă ccuurrbbee ppllaannee ..................................................................................................................................................................................................8866 IIIIII..11..77.. CCeerrccuull oossccuullaattoorr aall uunneeii ccuurrbbee ppllaannee ..........................................................................................................................................................................8877 IIIIII..11..88.. PPuunnccttee mmuullttiippllee aallee uunneeii ccuurrbbee ppllaannee ..........................................................................................................................................................................8888 IIIIII..11..99.. ÎÎnnffăăşşuurrăăttooaarreeaa uunneeii ffaammiilliiii ddee ccuurrbbee ppllaannee ........................................................................................................................................................9911 IIIIII..11..1100.. EEvvoolluuttaa ((ddeessffăăşşuurraattaa)) uunneeii ccuurrbbee ppllaannee ................................................................................................................................................................9922 IIIIII..11..1111.. CCuurrbbuurraa şşii rraazzaa ddee ccuurrbbuurrăă aa uunneeii ccuurrbbee ppllaannee ...................................................................................................................... 9933
III.1.12. Rezumat ..................................................................................................................... 95 IIIIII..11..1133..Test de autoevaluare ................................................................................................... 95 III.1.14. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree ........................................................................................................ 9955
III.1.1. Introducere În cadrul acestei unităţi de învăţare se studiază, cu ajutorul analizei matematice, geometria euclidiană a curbelor plane, anume acele proprietăţi ale acestora, precum şi acele mărimi ce li se pot asocia, care sunt invariante faţă de grupul de transformări ortogonale ale planului euclidian. Astfel se introduc reepprreezzeennttăărriillee aannaalliittiiccee aallee curbelor plane, se studiază principalele proprietăţi geometrice ale acestora: taannggeennttaa şşii nnoorrmmaallaa,, llungimea unui arc de curbă, elementul de arc, noţiunea de coonnttaacctt,, cceerrccuull oossccuullaattoorr,, ppuunncctteellee mmuullttiippllee aallee uunneeii ccuurrbbee,, îînnffăăşşuurrăăttooaarreeaa uunneeii ffaammiilliiii ddee ccuurrbbee,, eevvoolluuttaa uunneeii ccuurrbbee şşii curbura şi raza de curbură a unei curbe plane.
III.1.2 Competenţele unităţii de învăţare:
După parcurgerea materialului studentul va fi capabil : -să identifice şi să exemplifice reprezentările analitice ale curbelor în plan; -să definească şi să aplice în exerciţii noţiunile de: tangentă şi normală la o curbă plană, subtangentă, subnormală, segment tangentă şi segment normală, lungime a unui arc de curbă plană, element de arc; -să definească , să exemplifice şi să caracterizeze noţiunea de contact între două curbe plane; -să înregistreze noţiunile teoretice relative la cercul osculator şi să le aplice în exerciţii; -să determine punctele multiple ale unei curbe plane, precum şi tangentele în acestea; -să definească şi să determine înfăşurătoarea unei familii de curbe plane; -să definească şi să determine evoluta unei curbe plane; -să definească şi să determine cuurrbbuurraa şşii rraazzaa ddee ccuurrbbuurrăă aa uunneeii ccuurrbbee ppllaannee.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.

82
IIIIII..11..33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa ccuurrbbeelloorr ppllaannee Fie (π) planul (xOy) în care s-a fixat un sistem de coordonate carteziene x, y.
Definiţia 1. Se numeşte arc simplu de curbă plană, o mulţime (Γ) de puncte M din plan ale căror coordonate carteziene x, y în raport cu reperul ortonormat { }j ,i ,0=R al lui 2R şi vectori de poziţie r satisfac una din următoarele relaţii:
(Γ) : F(x, y) = 0, (x, y) ∈ D ⊆ 2R , (1)
(Γ) : y = f(x), x ∈ (x1, x2) ⊆ r , (2)
(Γ) :
⊆∈==
, ) t,(t t ),(),(
21 rtyytxx
(3)
(Γ) : r ) t,(t t (t), rr 21 ⊆∈= , (4)
unde funcţiile F, f, x, y, r satisfac condiţiile: 1) sunt reale, uniforme şi continue; 2) funcţiile x şi y stabilesc o corespondenţă biunivocă şi bicontinuă între punctele M ∈ (Γ) şi mulţimea valorilor parametrului real t ( )),( 21 ttt ∈ ; 3) admit derivate de ordinul întâi continue.
Relaţiile (1), (2), (3), (4) se numesc respectiv reprezentarea analitică implicită sau ecuaţia implicită a arcului simplu de curbă plană (Γ), reprezentarea analitică explicită sau ecuaţia explicită a arcului simplu de curbă plană (Γ), reprezentarea analitică parametrică sau ecuaţiile parametrice ale arcului simplu de curbă plană (Γ) şi reprezentarea vectorială sau ecuaţia vectorială a arcului simplu de curbă plană (Γ).
Definiţia 2. a. Se numeşte arc regulat de curbă plană, mulţimea (Γ) a punctelor M din 2R , ale căror coordonate carteziene x, y în raport cu reperul ortonormat { }j ,i ,0=R al lui 2R şi vectori de poziţie r satisfac ecuaţia (1), sau ecuaţia (2), sau sistemul (3), sau ecuaţia (4), unde funcţiile F, f, x, y, r îndeplinesc condiţiile numite de regularitate:
1) sunt reale, uniforme şi continue; 2) funcţiile x şi y stabilesc o corespondenţă biunivocă şi bicontinuă între punctele M ∈ (Γ) şi mulţimea valorilor parametrului real t ( )),( 21 ttt ∈ ; 3) admit derivate de ordinul întâi continue; 4) în intervalele considerate sunt îndeplinite relaţiile:
( ) 0)),('()),'( 22 ≠+ yxFyxF yx , 0)()( 22 ≠+ tytx , 0)( ≠tr ,
unde: ),(),(' yxxFyxF x ∂
∂= , ),(),(' yx
yFyxF y ∂
∂= , )()( t
dtdxtx = , )()( t
dtdyty = , )()( t
dtrdtr = .
b. Se numeşte arc regulat de ordinul n, sau clasă n un arc regulat de curbă plană (Γ), pentru care funcţiile F, f, x, y, r admit derivate (parţiale, respectiv ordinare) continue până la şi inclusiv ordinul n > 1, astfel încât nu toate derivatele de acelaşi ordin să se anuleze.
c. Se numeşte curbă regulată de ordinul n, sau curbă de clasă n, pe scurt: curbă, o reuniune de arce regulate de ordinul n, care au extremităţile, eventual, puncte singulare (în sensul definiţiei 3), adică: ( )iIi
Γ∪=Γ∈
)( .
Definiţia 3. a.Se numeşte punct singular al unei curbe plane, punctul în care nu este îndeplinită cel puţin una din condiţiile de regularitate.
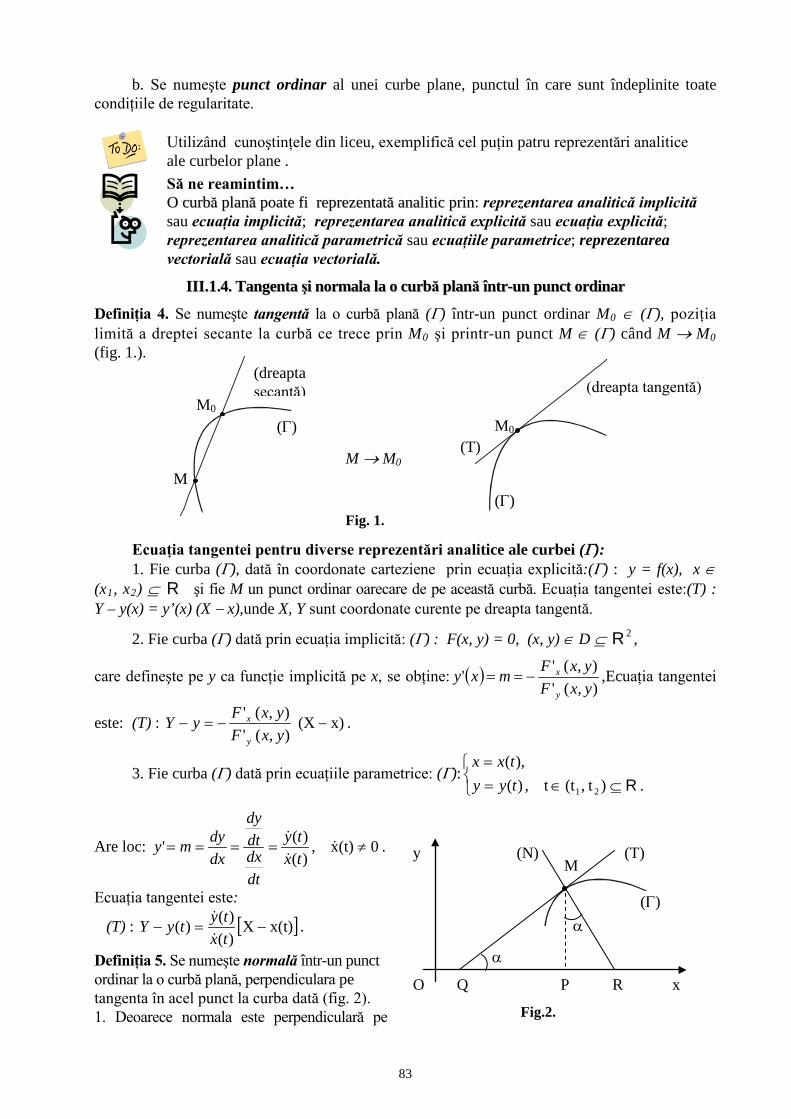
83
b. Se numeşte punct ordinar al unei curbe plane, punctul în care sunt îndeplinite toate condiţiile de regularitate.
Utilizând cunoştinţele din liceu, exemplifică cel puţin patru reprezentări analitice ale curbelor plane .
Să ne reamintim… OO ccuurrbbăă ppllaannăă ppooaattee ffii rreepprreezzeennttaattăă aannaalliittiicc pprriinn: reprezentarea analitică implicită sau ecuaţia implicită; reprezentarea analitică explicită sau ecuaţia explicită; reprezentarea analitică parametrică sau ecuaţiile parametrice; reprezentarea vectorială sau ecuaţia vectorială.
IIIIII..11..44.. TTaannggeennttaa şşii nnoorrmmaallaa llaa oo ccuurrbbăă ppllaannăă îînnttrr--uunn ppuunncctt oorrddiinnaarr
Definiţia 4. Se numeşte tangentă la o curbă plană (Γ) într-un punct ordinar M0 ∈ (Γ), poziţia limită a dreptei secante la curbă ce trece prin M0 şi printr-un punct M ∈ (Γ) când M → M0 (fig. 1.).
Ecuaţia tangentei pentru diverse reprezentări analitice ale curbei (Γ): 1. Fie curba (Γ), dată în coordonate carteziene prin ecuaţia explicită:(Γ) : y = f(x), x ∈
(x1, x2) ⊆ R şi fie M un punct ordinar oarecare de pe această curbă. Ecuaţia tangentei este:(T) : Y – y(x) = y’(x) (X − x),unde X, Y sunt coordonate curente pe dreapta tangentă.
2. Fie curba (Γ) dată prin ecuaţia implicită: (Γ) : F(x, y) = 0, (x, y) ∈ D ⊆ 2R ,
care defineşte pe y ca funcţie implicită pe x, se obţine: ( )),('),(' '
yxFyxFmxy
y
x−== ,Ecuaţia tangentei
este: (T) : x)(X ),('),(' −−=−
yxFyxFyY
y
x .
3. Fie curba (Γ) dată prin ecuaţiile parametrice: (Γ):
⊆∈==
. ) t,(t t,)(),(
21 Rtyytxx
Are loc: 0(t)x ,)()(' ≠====
txty
dtdxdtdy
dxdymy .
Ecuaţia tangentei este:
(T) : [ ]x(t)X )()()( −=−
txtytyY
.
Definiţia 5. Se numeşte normală într-un punct ordinar la o curbă plană, perpendiculara pe tangenta în acel punct la curba dată (fig. 2). 1. Deoarece normala este perpendiculară pe
M → M0
M0
(T)
(dreapta tangentă)
(Γ)
M0
M
(dreapta secantă)
(Γ)
Fig. 1.
M (T) (N)
(Γ) α
α
x
y
O Q P R
Fig.2.

84
tangentă, se obţine: )('
11xym
−=−=µ , unde µ este panta normalei în punctul M la curba (Γ)
dată de ecuaţia: y = y(x), x ∈ (x1, x2) ⊆ R .
Ecuaţia normalei este : (N) : ( )xX )('
1)( −−=−xy
xyY , unde X, Y sunt coordonate curente pe
dreapta normală. 2. Dacă curba (Γ) este dată prin ecuaţia implicită:(Γ) : F(x, y) = 0, (x, y) ∈ D ⊆ 2R ,
se obţine: ),('),('1
yxFyxF
m x
y=−=µ .Ecuaţia normalei devine: (N) : ( )xX ),('),('
−=−yxFyxF
yYx
y .
3. Dacă curba (Γ) este dată prin ecuaţiile parametrice:
⊆∈==
Γ, ) t,(t t,)(
),(:)(
21 Rtyytxx
atunci se obţine: 0(t)y ,)()(1
≠−=−=
tytx
mµ . Ecuaţia normalei este:
(N) : [ ]x(t)X )()()( −−=−
tytxtyY
.
Observaţia 1. Dacă se ţine seama de faptul că în cazul în care m = 0 atunci dreapta este paralelă cu axa Ox, iar dacă m = ±∞ dreapta este paralelă cu axa Oy, se obţine pentru F’x (x,y)= 0 şi F’y(x,y)≠ 0 că tangenta este paralelă cu Ox, iar dacă F’x(x,y)≠ 0 şi F’y (x,y)= 0 tangenta este paralelă cu Oy.
Condiţia ca punctul să fie ordinar este esenţială, deoarece în caz contrar ambele derivate parţiale s-ar anula şi deci nu s-ar putea preciza panta tangentei.
Exemple 1
Să se scrie ecuaţiile tangentelor şi normalelor în punctele indicate, la curbele: i) (Γ) : y = ln x + 1 în punctul A(x = e); ii) (Γ’) : x = et cos t, y = et sin t în punctul B(1, 0); iii) (Γ’’) : x3 + 3 x2y – y2 + 9 = 0 în punctul C(0, 3).
Soluţie: i) Punctul de abscisă e are ordonata y = 2, iar panta tangentei x
ym 1'== se
calculează pentru x = e. Ecuaţia tangentei în A este:(T) : )( 12 exe
y −=− , sau
(T) : x – ey + e = 0,iar a normalei: (N) : y – 2 = –e(x - e),sau (N) : ex + y – 2 − e2 = 0.
ii) Se observă că punctul B(1, 0) corespunde bijectiv valorii t0 = 0. Derivatele :
x (t) = et (cos t – sin t), y (t) = et (sin t + cos t),calculate în B au valorile 10 =x şi 10 =y .Panta tangentei în B este m = 1, iar ecuaţia tangentei în B la curba considerată
este: (T’) : x – y – 1 = 0. Ecuaţia normalei se scrie: (N’) : x + y – 1 = 0.
iii) Deoarece: y 2 3
xy6 x3),(),('
2
2
−+
−=−=xyxF
yxFm
y
x ,
panta tangentei în C are valoarea m = 0. Ecuaţia tangentei în C la curba considerată este: (T’’) : y – 3 = 0 şi a dreptei normale: (N’’) : x = 0.
Scrie ecuaţiile tangentelor şi normalelor în punctele indicate, la curbele: i) (Γ) : y = sin x în punctul A (x = 0);
ii) (Γ’) : 1
1+
=t
x , 1+
=t
ty în punctul B(t = 1);
iii) (Γ’’) : x3 - y3 + 3 xy – y2 – 2x + 4 = 0 în punctul C(1, -1).

85
R : i) (T): x – y = 0; (N): x + y = 0; ii) (T’): x + y – 1 = 0; (N’): x - y = 0; iii) (T’’): x - y – 2 = 0; (N’’): x + y = 0.
Să ne reamintim… Ecuaţia tangentei este (T) : Y – y(x) = y’(x) (X − x), unde panta tangentei
( )),('),(' '
yxFyxFmxy
y
x−== , sau ( ) 0(t)x ,)()(' ≠==
txtymxy , iar
)('11xym
−=−=µ ,
unde µ este panta normalei.
IIIIII..11..55.. Lungimea unui arc de curbă plană. Elementul de arc
În scopul definirii lungimii unui arc AB al unei curbe plane (Γ), format doar din puncte ordinare, se va înscrie în AB o linie poligonală cu n coarde, care uneşte punctele extreme A şi B ale arcului (fig.4). Acest lucru poate fi făcut pentru fiecare întreg pozitiv n, într-un mod arbitrar, astfel încât lungimea coardei maxime să tindă la zero, când n tinde la infinit. Lungimile Ln ale acestor linii poligonale se obţin din teorema lui Pitagora. Dacă şirul {Ln}al acestor lungimi este convergent cu limita L, atunci arcul AB al curbei (Γ) se spune a fi rectificabil, iar valoarea L = LAB este numită lungimea arcului AB al curbei plane (Γ).
Teorema 1. Un arc AB al unei curbe plane (Γ), de clasă cel puţin 1 (unu) este rectificabil.
Dacă arcul AB al curbei plane (Γ) este dat în reprezentare explicită:
(Γ) : y = f(x), x ∈ [xA, xB] R⊆⊂ )x,x( 21 , atunci lungimea sa este dată de:
LAB = ( )∫ +BX
AXdxxf 2)('1 ,iar dacă arcul AB
al curbei plane (Γ) este dat în reprezentare parametrică:
( ) [ ] ( )
⊆⊂∈==
Γ, ,, ,)(
),( :
21 Rttttttyytxx
BA
atunci lungimea sa este dată de:
LAB = ∫ +B
A
t
tdttytx )()( 22 .
Pentru demonstraţie a se consulta [11]-pag.6.
Dacă se schimbă valoarea fixă tB în LAB printr-o variabilă t, atunci ea devine o funcţie de t, fie ea s(t). Dacă se înlocuieşte tA printr-o valoare fixată t0 ∈ (t1, t2) se obţine:
∫ +=t
ttdtytxts
0
~)~()~()( 22 ,
==
t~ddy)t~(y ,~)t~(
tddxx .
Această funcţie s(t),este numită lungimea arcului M0M al curbei (Γ).
Teorema 2. Lungimea de arc s(t) poate fi întrebuinţată ca parametru în reprezentările parametrice ale curbelor. Trecerea de la t la s păstrează clasa curbei. Pentru demonstraţie a se consulta [11]-pag.7. Definiţia 6. Parametrul s este numit parametru natural al curbei plane (Γ), iar reprezentarea:
( )
==
Γ,,)(
),(:
naturalparametrussyysxx
se numeşte reprezentarea naturală a curbei plane (Γ). Pentru lungimea de arc se obţine cu uşurinţă formula: LAB = ∫ +B
A
t
tdydx 22 )()( .
(Γ)
A
B Fig. 3.

86
Se face notaţia: 22 )()( dydxds += .
Definiţia 7. Se numeşte element de arc (liniar) al curbei plane (Γ) expresia ds. Se obţine: dttytxds )()( 22 += , sau: dxxyds )('1 2+= .
Să ne reamintim… Funcţia s(t), lungimea arcului : ∫ +=
t
ttdtytxts
0
~)~()~()( 22 ,
Elementul de arc (liniar): dttytxds )()( 22 += , sau: dxxyds )('1 2+= .
IIIIII..11..66.. CCoonnttaaccttuull îînnttrree ddoouuăă ccuurrbbee ppllaannee
Noţiunea de „contact” între curbe plane descrie analitic situaţii cum sunt cele prezentate în figura 4.
Se consideră curbele plane de reprezentări analitice:
( ) ( )
⊆∈==
Γ, , ,)(
),( :
211 Rttttyy
txx ( ) 0),(:2 =Γ yxF , (x, y) ∈ D 2R⊆ ,
ambele de clasă k, k ∈ *N . Punctele lor comune se obţin prin rezolvarea sistemului:
==
=
),(),(
,0),(
tyytxx
yxFcare este echivalent cu ecuaţia: ( ) 0y(t) ),()( =≡ txFtφ .
Definiţia 8. Două curbe plane au într-un punct comun un contact de ordinul n dacă în acel punct sunt confundate n+1 puncte comune celor două curbe. Teorema 3. Fie curbele plane (Γ1) şi (Γ2) de clasă k, k ∈ *N , date respectiv prin ecuaţiile:
( ) ( )
⊆∈==
Γ, , ,)(
),( :
211 Rttttyy
txx ( ) 0),(:2 =Γ yxF , (x, y) ∈ D 2R⊆ .
Condiţiile ca într-un punct comun M0(t = t0) să existe un contact de ordinul n, n ≤ k sunt: φ(t0) = 0, φ’(t0) = 0, ..., φ(n)(t0) = 0, φ(n+1)(t0) ≠ 0, unde: ( )y(t) ),()( txFt =φ .
Pentru demonstraţie a se consulta [11]-pag.11-12.
Observaţia 2. Teorema 3 caracterizează contactul de ordinul n pentru două curbe plane, într-un punct comun al lor, în cazul în care o curbă este dată în reprezentare parametrică, iar a doua în reprezentare implicită, iar teorema următoare se referă la cazul în care ambele curbe sunt date în reprezentare explicită. Teorema 4. Dacă două curbe plane (Γ1) şi (Γ2) de clasă k, k ∈ *N , date respectiv prin ecuaţiile explicite: ( ) )(: 11 xfy =Γ , x ∈ (x1, x2) ⊆ R , ( ) )(: 22 xfy =Γ , x ∈ (x3, x4) ⊆ R , au într-un punct comun M0 un contact de ordinul n, n ≤ k, atunci funcţiile f1(x), f2(x) şi derivatele lor până la şi inclusiv ordinul n, sunt egale în acel punct, derivatele de ordinul n+1 au valori distincte în punctul respectiv.
Fig. 4.
M0
(Γ1)
(Γ2) M0
(Γ2) (Γ1)

87
Pentru demonstraţie a se consulta [11]-pag.12. Propoziţia 1. Tangenta la o curbă plană de clasă k, k ≥ 1, într-un punct ordinar al său, are cu aceasta un contact de cel puţin ordinul 1. Pentru demonstraţie a se consulta [11]-pag.13.
Exemple 2
Se consideră curbele plane: (Γ1) : y = ex, (Γ2) : 2
12xxy ++= . Să se afle ordinul
contactului lor în punctul comun.
Soluţie: Fie funcţia: 12
)(2
−−−= xxexE x .Zeroul funcţiei E(x), adică abscisa
punctului de intersecţie a curbelor (Γ1) şi (Γ2) este x = 0. Se poate cu uşurinţă verifica unicitatea acestei soluţii. Rezultă că punctul comun are coordonatele (0, 1). Se calculează: 0 )1( )(' 0x0 =−−= == xexE x
x , 0 )1( )('' 0x0 =−= ==x
x exE ,
01 )(''' 0x0 ≠== ==x
x exE .Rezultă că cele două curbe au în punctul comun un contact de ordinul 2, adică trei puncte confundate.
Se consideră curbele plane: (Γ1) : y = x sinx, (Γ2) : 3xy = . Determină ordinul contactului lor în origine. R: Contact de ordinul întâi.
Să ne reamintim… Condiţiile ca într-un punct comun M0(t = t0) să existe un contact de ordinul n
sunt: φ(t0) = 0, φ’(t0) = 0, ..., φ(n)(t0) = 0, φ(n+1)(t0) ≠ 0, unde: ( )y(t) ),()( txFt =φ ,curbele fiind date în reprezentare implicită,respectiv parametrică.
Dacă două curbe plane date prin ecuaţiile explicite )(1 xfy = , )(2 xfy = au într-un punct comun M0 un contact de ordinul n, n ≤ k, atunci funcţiile f1(x), f2(x) şi derivatele lor până la şi inclusiv ordinul n, sunt egale în acel punct, derivatele de ordinul n+1 au valori distincte în punctul respectiv.
IIIIII..11..77.. CCeerrccuull oossccuullaattoorr aall uunneeii ccuurrbbee ppllaannee
Fie curba plană (Γ) de clasă k, k ≥ 2. Se studiază în continuare existenţa unui cerc al cărui contact cu (Γ) în punctul ordinar M0 ∈ (Γ) să fie de cel puţin ordinul 2.
Definiţia 9. Se numeşte cerc osculator al unei curbe plane într-un punct ordinar, cercul care are cu curba în punctul ordinar un contact de cel puţin ordinul 2.
Teorema 5. Orice curbă plană, de clasă cel puţin 2 în vecinătatea unui punct ordinar al ei, admite un cerc osculator şi numai unul în acel punct, care are coordonatele centrului şi raza
date de expresiile: ( )0000
20
200
0 yxyxyxyx
−+
−=α , ( )0000
20
200
0 yxyx
yxxy
−+
+=β , ( )0000
2/320
20
yxyxyxR
−+
= ,
unde:x0 = x(t0), y0 = y(t0), )( 00 txx = , )( 00 tyy = , )( 00 txx = , )( 00 tyy = , pentru cazul în care
curba este dată în reprezentare parametrică ( ) ( )
⊆∈==
Γ , ,)(
),( :
21 Rttttyytxx
şi M0 ∈ (Γ) ,
corespunzător la t = t0. Pentru demonstraţie a se consulta [11]-pag. 17-18. Observaţia 3. Dacă curba plană (Γ) este dată în reprezentare explicită: ( ) )(: xfy =Γ , x ∈ (x1,
x2) ⊆ R , atunci prin trecerea la reprezentarea parametrică: ( )
⊆∈==
Γ, ) t,(t t,)(
,:
21 Rtfytx
se
obţine: 1=x , 0=x , 'fy = , ''fy = , t0 = x0 şi deci coordonatele centrului cercului

88
osculator şi raza cercului osculator, într-un punct ordinar M0(x0) ∈ (Γ) la curba dată în
reprezentare explicită, sunt date de: ( )0
200
0 '''1'
yyyx +
−=α , ( )0
20
0 '''1
yyy +
+=β , ( )0
2/320
'''1
yyR +
= .
Definiţia 10. Punctul M0(t0) ∈ (Γ) se numeşte punct de inflexiune al curbei (Γ) dacă în el se
verifică condiţia: 000
00 =yxyx
.
Observaţia 4. În punctele dreptelor, în punctele unui arc - segment de dreaptă - al unei curbe, în punctele de inflexiune ale unei curbe, nu se poate ataşa cerc osculator. Exemple 3
Să se determine ecuaţia cercului osculator la elipsă în punctul de intersecţie al acesteia cu semiaxa pozitivă a absciselor.
Soluţie: Punctul considerat este A(a, 0), iar ecuaţiile parametrice ale elipsei sunt:
==
sin t. b y t,cos ax
: )(E
Punctul A corespunde valorii t = 0.
Coordonatele centrului cercului osculator sunt:
=⋅−=
−=⋅−=
.000
,
2
222
abb
aba
abbba
β
α
Raza cercului osculator este: a
bab
bR22/32 )(
== .
Ecuaţia cercului osculator căutat este: (C) : 2
42
222
aby
abax =+
−− .
Determină ecuaţia cercului osculator al curbei (Γ) : y = sinx, în punctul A( 2π ,1).
R: (C) : 12
22
=+
− yx π .
Să ne reamintim…
Orice curbă plană, dată în reprezentare parametrică, de clasă cel puţin 2 în vecinătatea unui punct ordinar al ei, admite un cerc osculator şi numai unul în acel punct, care are coordonatele centrului şi raza date de expresiile:
( )0000
20
200
0 yxyxyxyx
−+
−=α , ( )0000
20
200
0 yxyx
yxxy
−+
+=β , ( )0000
2/320
20
yxyxyxR
−+
= .
IIIIII..11..88.. PPuunnccttee mmuullttiippllee aallee uunneeii ccuurrbbee ppllaannee
Definiţia 11. Se spune că M0 este un punct multiplu de ordinul p al curbei plane (Γ) de clasă k, k ≥ p, dacă prin M0 curba trece de p ori. Observaţia 5. Dacă p = 2, punctul M0 este un punct dublu al curbei (Γ) (fig. 5), dacă p = 3, punctul M0 este un punct triplu (fig. 6).

89
Fig. 5. Fig. 6.
Teorema 6. Fie curba plană (Γ), de clasă k, k ∈ *N , dată în reprezentare implicită:(Γ) : F(x, y) = 0, (x, y) ∈ D 2R⊆ şi M0 ∈ (Γ). Dacă M0(x0, y0) este un punct multiplu de ordinul p, p ≤ k al curbei plane (Γ), atunci în M0 se anulează toate derivatele parţiale până la şi inclusiv ordinul p-1, fără a se anula şi toate derivatele parţiale de ordinul p:
( ) 0, 00 =
∂∂∂ yx
yxF
sr
m
, (∀) (r, s) astfel încât r + s = m, m ∈{0, 1, ..., p-1} şi
( ) 0, 00 ≠
∂∂∂ yx
yxF
sr
p
, pentru cel puţin o pereche (r, s) cu proprietatea r + s = p.
Pentru demonstraţie a se consulta [11]-pag. 24. Observaţia 6. Deoarece pentru orice punct multiplu de ordinul p, p ≥ 2 au loc condiţiile: F’x(x0, y0) = 0, F’y(x0, y0) = 0,rezultă că el este un punct singular al curbei (Γ).
Teorema 7. Se consideră o curbă plană (Γ), de clasă k, k ∈ *N , dată în reprezentare implicită:
(Γ) : F(x, y) = 0, (x, y) ∈ D 2R⊆ şi fie M0(x0, y0) un punct dublu al curbei (Γ). Atunci pantele tangentelor la cele două ramuri ale curbei plane (Γ), care trec prin el sunt date de relaţia:
0'''' 2'' 20002
0
2 =++ xyxy FmFmF .
Pentru demonstraţie a se consulta [11]-pag. 25. Observaţia 7. Realizantul ecuaţiei de gradul doi în m este: 2
02000
'' '' ''' 2yxyx FFF −=∆ , (∆ = 4 ∆’).
În funcţie de semnul lui ∆’ se disting trei cazuri în ceea ce priveşte natura punctelor duble: 1. Dacă ∆’ > 0, se obţin m1 ≠ m2 (reale). În acest caz, în punctul dublu există două tangente
reale şi distincte. Punctul dublu M0 este un nod (fig. 7.). 2. Dacă ∆’ = 0, se obţin m1 = m2 (reale). În acest caz, în punctul dublu există două
tangente reale confundate. Punctul dublu M0 este un punct de întoarcere (de primă speţă - fig. 8.; de a doua speţă - fig. 9.; de contact (tacnod) - fig. 10.).
3. Dacă ∆’ < 0, se obţin m1, m2 imaginare. În acest caz, în punctul dublu nu se pot duce tangente reale la curbă. Dacă se ţine cont de definiţia tangentei la o curbă plană , rezultă că nu există puncte pe curbă într-o vecinătate, suficient de mică a punctului dublu. Punctul M0 este un punct izolat (fig. 11.).
Observaţia 8. Dacă p = 3, (M0 punct triplu), membrul doi al relaţiei:0
00 ''' ''
''' '' '
2000
0020
yFF
yFFy
yyx
yxx
+
+−= ,
este tot o nedeterminare de tip 00
, care ridicată din nou cu regula lui l’Hôspital va conduce la
implicaţii de natură algebrică; ş.a.m.d.
M0
M
(Γ) p = 2
M0
(Γ)
p = 3

90
(T) =
(T)
1
2
(T) =
(T)
1
2
Fig. 10. Fig.11. Exemple 4
Să se studieze punctele singulare ale curbei:(Γ) : y2 – (x – a)2 (x – b) = 0, a, b ≠ 0 şi să se scrie ecuaţiile tangentelor corespunzătoare lor.
Soluţie: Se notează F(x, y) = y2 – (x – a)2 (x – b). Punctele singulare ale curbei de ecuaţie: F(x, y) = 0 se află printre soluţiile sistemului:
==
=
,0)y ,(',0)y ,('
,0)y ,(
xFxF
xF
y
x adică:
==−−−−−
=−−−
0. y 2,0)()(x )(x 2
,0)( )(2
22
axbabxaxy
adică
==
.0,
yax
Se obţine punctul A(a, 0). Derivatele parţiale de ordinul doi ale funcţiei F(x, y) sunt:
) 2 3(2),('' 2 abxyxF x −−−= , 0),('' =yxF xy , 2),('' 2 =yxF y,
şi calculate în A(a, 0) ele sunt: ) (2'' 20
abFx
−= , 0''00
=yxF , 2'' 20
=y
F ,
deci discriminantul ∆’ = 4 (a – b).
1.Dacă a > b, atunci ∆ > 0 şi punctul A este nod. Din ecuaţia: ( ) ( ) ( ) 0 '''' 2'' 2
00020
2 =++xyxy
FFmFm , adică: 2 m2 – 2 (a – b) = 0,
rezultă bam −±=2,1 şi ecuaţiile tangentelor la curba plană (Γ) în punctul A sunt:
(T1, 2) : )( axbay −−±= .
2. Dacă a = b, atunci ∆ = 0 şi punctul A este de întoarcere, iar ecuaţia tangentei devine: (T) : y = 0.
3. Dacă a < b, atunci ∆ < 0 şi punctul A este punct izolat.
Studiază punctul singular al curbei:(Γ) : x(x2+y2) + a(x2 - y2) = 0, a ∈R şi scrie ecuaţiile tangentelor în acest punct.
R: O(0,0) este punct dublu ,(T1) : xy = , (T2) : xy −= .
(Γ) M0
Fig.7.
(T2)
(T1)
M0
Fig. 8.
(Γ)
Fig. 9.
M0
(Γ)
M0
(Γ)
(T1) = (T2)
M0 (Γ)

91
Să ne reamintim… Dacă M0 este un punct multiplu de ordinul p, al unei curbe plane,atunci în M0 se anulează toate derivatele parţiale până la şi inclusiv ordinul p-1, fără a se anula şi toate derivatele parţiale de ordinul p.
IIIIII..11..99.. ÎÎnnffăăşşuurrăăttooaarreeaa uunneeii ffaammiilliiii ddee ccuurrbbee ppllaannee
Definiţia 12. Se numeşte familie de curbe plane mulţimea curbelor ( ) R ∈Γ αα , în care fiecare curbă din familie este perfect determinată de o valoare fixată a parametrului α.
Definiţia 13. Fie familia de curbe plane ( ) R ∈Γ αα , date în reprezentare implicită:(Γα) : F(x, y, α) = 0, (x, y) ∈ D 2R⊆ ,α ∈ R ,
de clasă k, k ≥ 1, astfel încât funcţia F să fie diferenţiabilă şi în raport cu α. Se consideră două curbe vecine (Γα) şi (Γα+∆α), unde: (Γα+∆α) : F(x, y, α+∆α) = 0,care se intersectează în punctul M (fig. 12).Dacă ∆α → 0, curba (Γα+∆α) tinde către curba (Γα), iar punctul M ia o poziţie limită Cα pe curba (Γα).Punctul Cα, care este punctul de intersecţie a două curbe infinit vecine, se numeşte punct caracteristic al curbei (Γα).Prin urmare, fiecare curbă din familia ( ) R ∈Γ αα are un punct caracteristic. Definiţia 14. Se numeşte înfăşurătoare a familiei de curbe plane ( ) R ∈Γ αα , locul geometric al punctelor caracteristice Cα, ale curbelor din familie.
Teorema 8. Înfăşurătoarea unei familii de curbe plane ( ) R ∈Γ αα , date în reprezentare implicită:(Γα) : F(x, y, α) = 0, (x, y) ∈ D 2R⊆ , α ∈ R , se obţine, dacă există, prin eliminarea parametrului α între ecuaţia dată şi ecuaţia obţinută prin anularea derivatei parţiale
în raport cu α a membrului întâi al acesteia: 0),,( =∂∂ αα
yxF .
Observaţia 9. Dacă eliminarea lui α întâmpină dificultăţi de calcul, se rezolvă în raport cu x şi y
aceste două ecuaţii şi se obţine: (I) :
==
),(),(
αα
yyxx
relaţii care reprezintă ecuaţiile parametrice ale înfăşurătoarei.
Teorema 9. Înfăşurătoarea unei familii de curbe plane şi o curbă din familie au aceeaşi tangentă în punctul de contact, care este punctul caracteristic. Observaţia 10. Din teorema precedentă rezultă că înfăşurătoarea este tangentă la toate curbele din familie.
Teorema 10. Prin eliminarea parametrului α între ecuaţiile:
==
,0) y, ,(',0) y, ,(
αα
α xFxF
se obţine ca
soluţie singulară şi locul punctelor multiple ale curbelor (Γα) : F(x, y, α) = 0, (x, y) ∈ D 2R⊆ , dacă acestea există. Pentru demonstraţii a se consulta [11]-pag.37-38.
Exemple 5
Să se determine înfăşurătoarea familiei de cercuri cu centrele pe o hiperbolă echilateră şi care trec prin origine.
Soluţie: Ecuaţia implicită a unei hiperbole echilatere este de forma: (H) : xy – a = 0.
Fig. 12.
M
(Γα+∆α)
(Γα)
Cα

92
Punctul curent al hiperbolei are coordonatele
ta ,tM , t ≠ 0.
Ecuaţiile cercurilor cu centrul în M şi care trec prin origine sunt de forma:
F(x, y, t) ≡ 0)( 2
22
22 =−−
−+−
tat
taytx , t ≠ 0,
sau: F(x, y, t) ≡ 02222 =−−+ ytatxyx , t ≠ 0.
Ecuaţia înfăşurătoarei se obţine prin eliminarea parametrului t între ecuaţiile
sistemului:
==
,0) , ,(',0),,(
tyxFtyxF
t
adică:
⋅=+−
=−−+
. t 0ty a 2 x2
,0 2 2
2
22 ytaxtyx
Dacă se adună ecuaţiile sistemului de mai sus, după ce în prealabil a doua ecuaţie a
fost amplificată cu t, se obţine: x4
22 yxt += . După înlocuirea lui t într-una din ecuaţiile
sistemului, rezultă ecuaţia implicită a înfăşurătoarei: (I): (x2 + y2)2 – 16 a xy = 0.
Determină înfăşurătoarea familiei de cercuri : (Γa): x2 + y2 – 2 a x + a2 – 4a = 0. R: (I): y2 = 4(x + y).
Să ne reamintim… Înfăşurătoarea unei familii de curbe plane ( ) R ∈Γ αα , date în reprezentare implicită:(Γα) : F(x, y, α) = 0, (x, y) ∈ D 2R⊆ , α ∈ R , se obţine, dacă există,
prin eliminarea parametrului α între ecuaţiile:
==
.0) y, ,(',0) y, ,(
αα
α xFxF
IIIIII..11..1100.. EEvvoolluuttaa ((ddeessffăăşşuurraattaa)) uunneeii ccuurrbbee ppllaannee
Dacă se consideră o curbă plană, tangentele la ea constituie o familie de drepte, care depind de un parametru (parametrul curbei), a cărei înfăşurătoare este curba dată (fig. 13).
Evident, că şi normalele unei curbe plane constituie o familie de drepte, care depind de un parametru şi anume parametrul ales pe curbă.
Definiţia 15. Se numeşte evolută sau desfăşurată a unei curbe plane, înfăşurătoarea normalelor ei (fig. 14).
Fig.14.
M2 (N3)
(N2) (N1)
(N)
(E) 15
(T)
(T3)
(T2)
(T1)
M3
M1 (Γ)
(T)
(Γ) Fig. 13.

93
Observaţia 11. Tangentele la evoluta (E) sunt normale la curba dată (Γ).
Teorema 11. Fie o curbă plană (Γ) de clasă k, k ∈ *N , k ≥ 2, dată în reprezentare parametrică:
⊆∈==
Γ.) t,(t t),(
),(:)(
21 Rtyytxx
Atunci evoluta ei este o curbă plană (E), definită analitic prin
relaţiile:(E) :
( )
( )
−+
+=
−+
−=
.)( )()( )(
)()( )()(
,)( )()( )(
)()( )()(
22
22
tytxtytxtytxtxtyY
tytxtytxtytxtytxX
Pentru demonstraţie a se consulta [11]-pag.41.
Observaţia 12. Coordonatele X şi Y ale punctului curent de pe evolută, corespunzător punctului ( )y(t) ),(txM de pe curba (Γ), au aceleaşi expresii ca cele ale centrului cercului osculator.
Se obţine astfel:
Teorema 12. Evoluta unei curbe plane este locul geometric al centrelor cercurilor osculatoare ale curbei date. Exemple 6
Să se determine evoluta unei elipse. Soluţie: Dacă se consideră elipsa în reprezentare analitică implicită: (Γ) :
012
2
2
2
=−+by
ax ,înfăşurătoarea normalelor (evoluta) are ecuaţiile parametrice: (E) :
−=
=
, sin
, cos
32
32
α
α
bcy
acx
, (c2 = a2 – b2), sau după eliminarea parametrului α se obţine ecuaţia
implicită a evolutei: (E) : 32
232
32
)()()( cbyax =+ . Aşadar, evoluta elipsei este o astroidă.
Determină evoluta unei parabole (y2 = 2px). R: (E) : 8(x - p)3 – 27p y2 = 0 .
Să ne reamintim… Evoluta unei curbe plane, dată în reprezentare parametrică este definită
analitic prin relaţiile (E) :
( )
( )
−+
+=
−+
−=
.)( )()( )(
)()( )()(
,)( )()( )(
)()( )()(
22
22
tytxtytxtytxtxtyY
tytxtytxtytxtytxX
IIIIII..11..1111.. CCuurrbbuurraa şşii rraazzaa ddee ccuurrbbuurrăă aa uunneeii ccuurrbbee ppllaannee
Pentru a introduce noţiunea de curbură a unei curbe plane se reaminteşte relaţia care există într-un cerc, între unghiul la centru, arcul corespunzător şi raza cercului.
Se consideră un cerc cu centru O şi rază R, două tangente (T1) şi (T2) în punctele M1 şi M2
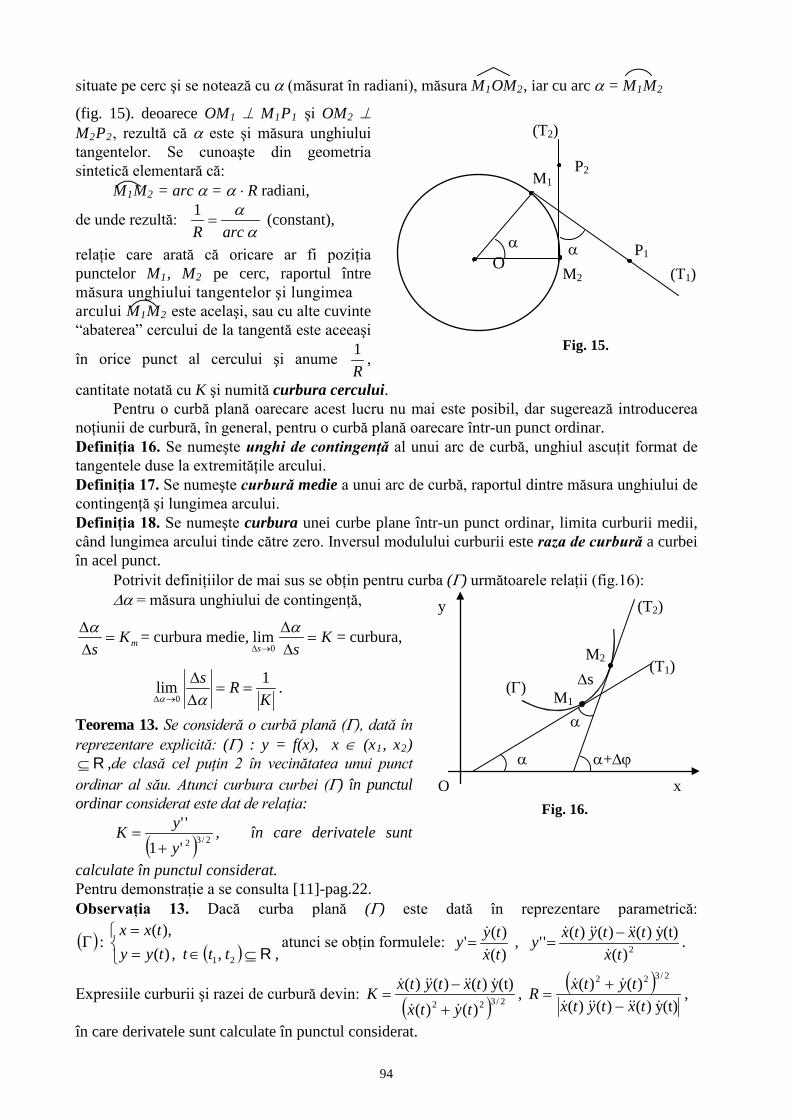
94
situate pe cerc şi se notează cu α (măsurat în radiani), măsura M1OM2, iar cu arc α = M1M2
(fig. 15). deoarece OM1 ⊥ M1P1 şi OM2 ⊥ M2P2, rezultă că α este şi măsura unghiului tangentelor. Se cunoaşte din geometria sintetică elementară că:
M1M2 = arc α = α ⋅ R radiani,
de unde rezultă: α
αarcR
=1 (constant),
relaţie care arată că oricare ar fi poziţia punctelor M1, M2 pe cerc, raportul între măsura unghiului tangentelor şi lungimea arcului M1M2 este acelaşi, sau cu alte cuvinte “abaterea” cercului de la tangentă este aceeaşi
în orice punct al cercului şi anume R1 ,
cantitate notată cu K şi numită curbura cercului. Pentru o curbă plană oarecare acest lucru nu mai este posibil, dar sugerează introducerea
noţiunii de curbură, în general, pentru o curbă plană oarecare într-un punct ordinar. Definiţia 16. Se numeşte unghi de contingenţă al unui arc de curbă, unghiul ascuţit format de tangentele duse la extremităţile arcului. Definiţia 17. Se numeşte curbură medie a unui arc de curbă, raportul dintre măsura unghiului de contingenţă şi lungimea arcului. Definiţia 18. Se numeşte curbura unei curbe plane într-un punct ordinar, limita curburii medii, când lungimea arcului tinde către zero. Inversul modulului curburii este raza de curbură a curbei în acel punct.
Potrivit definiţiilor de mai sus se obţin pentru curba (Γ) următoarele relaţii (fig.16): ∆α = măsura unghiului de contingenţă,
mKs
=∆∆α = curbura medie, K
ss=
∆∆
→∆
α0
lim = curbura,
KRs 1lim
0==
∆∆
→∆ αα.
Teorema 13. Se consideră o curbă plană (Γ), dată în reprezentare explicită: (Γ) : y = f(x), x ∈ (x1, x2)
R⊆ ,de clasă cel puţin 2 în vecinătatea unui punct ordinar al său. Atunci curbura curbei (Γ) în punctul ordinar considerat este dat de relaţia:
( ) 2/32 '1''
yyK
+= , în care derivatele sunt
calculate în punctul considerat. Pentru demonstraţie a se consulta [11]-pag.22. Observaţia 13. Dacă curba plană (Γ) este dată în reprezentare parametrică:
( ) ( )
⊆∈==
Γ, , ,)(
),( :
21 Rttttyytxx
atunci se obţin formulele: )()('
txtyy
= , 2)(
(t)y )()( )(''tx
txtytxy
−= .
Expresiile curburii şi razei de curbură devin: ( ) 2/322 )()(
(t)y )()( )(tytx
txtytxK
+
−= , ( )
(t)y )()( )()()( 2/322
txtytxtytxR
−+
= ,
în care derivatele sunt calculate în punctul considerat.
O
Fig. 15.
(T2)
α α
(T1)
M1
M2 P1
P2
M1
(T2)
(T1) (Γ)
α
α
x
y
O
α+∆ϕ
M2
∆s
Fig. 16.
95
Exemple 7
Se consideră curba plană: (Γ) : y = ex. Să se calculeze curbura ei în punctul A(0, 1).
Soluţie: [ ]2/3
2/3
0
2/322
21
)'(1')'( −
=
==+
=
x
x
x
eeK .
Determină curbura curbei plane (Γ) :
21
2xxy ++= în punctul A(0, 1).
R: 2/32−=K
Să ne reamintim… Curbura unei curbe plane dată în reprezentare explicită, respectiv parametrică, într-un
punct ordinar este dată de relaţia: ( ) 2/32 '1''
yyK
+= , respectiv
( ) 2/322 )()((t)y )()( )(
tytxtxtytxK
+
−= .
IIIIII..11..1122.. Rezumat În cadrul acestei unităţi de învăţare se prezintă principalele rezultate din geometria diferenţială a curbelor plane. Referitor la aceste curbe se introduc şi se exemplifică diferitele reprezentări analitice ale lor, se definesc, se caracterizează şi se exemplifică, noţiunile de: tangentă şi normală , lungime a unui arc de curbă, element de arc, contact între două curbe , cerc osculator, puncte multiple ale unei curbe, înfăşurătoare a unei familii de curbe plane, evolută şi curbură.
IIIIII..11..1133 Test de autoevaluare a cunoştinţelor 1. Defineşte noţiunile de: element de arc şi lungime a unui arc de curbă plană. 2. i)Defineşte şi caracterizează noţiunile de: contact între două curbe plane şi cerc osculator al unei curbe plane ; ii)Scrie o formulă de calcul a curburii unei curbe plane. 3. Continuă definiţia: Se spune că M este un punct multiplu de ordinul p al unei curbe plane… 4. Continuă definiţia: Se numeşte înfăşurătoare a unei familii de curbe plane... 5. Scrie ecuaţiile tangentei şi normalei la curba: (Γ) : x3 + y3 – 3 axy = 0,în punctul
23,
23 aaA .
6. Găseşte ordinul contactului în origine al curbelor plane: (Γ1) : y = x4, (Γ2) : y = x2 sin2 x. 7. Găseşte ecuaţia înfăşurătoarei familiei de drepte, care nu trec prin origine şi au proprietatea că segmentul cuprins între punctele de intersecţie cu axele de coordonate pe fiecare dreaptă , are lungimea constantă k . 8. Studiază punctele singulare ale curbei: (Γ) : - x2 + y3 +2 y2 = 0 şi scrie ecuaţiile tangentelor în aceste puncte.
IIIIII..11..1144.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree 11.. RReevveezzii ppaarraaggrraaffuull IIIIII..11..55..-- ddeeffiinniiţţiiaa 77 şşii tteeoorreemmaa 11.. 22.. ii))RReevveezzii ppaarraaggrraaffeellee IIIIII..11..66.. şşii IIIIII..11..77..;; iiii)) RReevveezzii tteeoorreemmaa 1133 şşii oobbsseerrvvaaţţiiaa 1133.. 33.. RReevveezzii ddeeffiinniiţţiiaa 1111.. 44.. RReevveezzii ddeeffiinniiţţiiaa 1144..5. (T) : x + y - 3a = 0; (N): x - y = o.
6.Ordinul contactului în O(0,0) este 5 .7.(I): .32
32
32
ayx =+ 8. O(0,0) este punct dublu;
(T1) : xy22
= , (T2) : .22 xy −=

96
Unitatea de învăţare III.2. Elemente de geometrie diferenţială a curbelor în spaţiu
Cuprins
III.2.1. Introducere ................................................................................................................. 96 III.2.2. Competenţe ................................................................................................................ 96
IIIIII..22..33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa ccuurrbbeelloorr îînn ssppaaţţiiuu .......................................................................................................................... 9966 IIIIII..22..44.. LLuunnggiimmeeaa uunnuuii aarrcc ddee ccuurrbbăă îînn ssppaaţţiiuu.. EElleemmeenntt ddee aarrcc ............................................................................................................ 9988 IIIIII..22..55.. Tangenta la o curbă în spaţiu……….. .............................................................................................................................................. 110000 IIIIII..22..66.. Planul normal la o curbă în spaţiu .................................................................................... 102 IIIIII..22..77.. Planul osculator la o curbă în spaţiu ....................................................................... 103
III.2.8. Normala principală la o curbă în spaţiu ........................................................................... 104 III.2.9. Binormala la o curbă în spaţiu ................................................................................ 106 III.2.10. Planul rectificant llaa oo ccuurrbbăă îînn ssppaaţţiiuu .............................................................................................................................................................. 110077 IIIIII..22..1111.. TTrriieeddrruull lluuii FFrreenneett ............................................................................................................................................................................................................................ 110088 IIIIII..22..1122.. CCuurrbbuurrăă.. TToorrssiiuunnee .......................................................................................................................................................................................................................... ..110099 IIIIII..22..1133.. FFoorrmmuulleellee lluuii FFrreenneett ...................................................................................................................................................................................................................... 111100 IIIIII..22..1144.. CCaallccuulluull ccuurrbbuurriiii şşii aall ttoorrssiiuunniiii .................................................................................................................................................................................... 111111 IIIIII..22..1155.. CCllaassee rreemmaarrccaabbiillee ddee ccuurrbbee îînn ssppaaţţiiuu .............................................................................................................................................. 111122 IIIIII..22..1166.. Rezumat ................................................................................................................... 114 IIIIII..22..1177.. Test de autoevaluare ................................................................................................ 114 III.2.18. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree .................................................................................................... 111144
III.2.1. Introducere În cadrul acestei unităţi de învăţare se definesc curbele în spaţiu (numite şi curbe strâmbe), se studiază principalele proprietăţi diferenţiale ale acestora şi se introduc anumite mărimi scalare: curbura şi torsiunea, care dau informaţii asupra formei unei curbe strâmbe.
III.2.2. Competenţele unităţii de învăţare:
După parcurgerea materialului studentul va fi capabil : -să identifice şi să exemplifice diversele rreepprreezzeennttăărrii aannaalliittiiccee aallee ccuurrbbeelloorr îînn ssppaaţţiiuu;; -să definească şi să caracterizeze conceptele teoretice referitoare la : lungimea unui arc regulat de curbă în spaţiu, tangentă, plan normal, plan osculator, normală principală, binormală şi plan rectificant; -să prezinte triedrul lui Frenet; -să aplice în exerciţii noţiunile teoretice referitoare la triedrul lui Frenet; -să scrie şi să utilizeze în aplicaţii formulele de calcul ale curburii şi torsiunii pentru o curbă în spaţiu ; -să definească şi să caracterizeze câteva clase remarcabile de curbe în spaţiu.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
IIIIII..22..33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa ccuurrbbeelloorr îînn ssppaaţţiiuu
Definiţia 1. Se numeşte arc simplu de curbă în spaţiu o mulţime (Γ) de puncte M din spaţiul euclidian real cu trei dimensiuni 3R , ale căror coordonate x, y, z în raport cu reperul ortonormat
{ }k ,j ,i ,0=R al lui 3R şi vectori de poziţie r satisfac una din următoarele relaţii:

97
⊆∈=
=Γ
,D z) y, (x, ,0)z y, ,(,0),,(
:)( 3 rxGzyxF
(1)
∈∈==
Γ),y ,(yy ), x,(x x ),y ,(
),,( :)(
2121xgzyxfz
(2)
∈===
Γ), t,(t t ),(
),(),(
:)(
21tzztyytxx
(3)
), t,(t t (t), rr :)( 21∈=Γ (4)
unde funcţiile F, G, f, g, x, y, z, r satisfac condiţiile: 1. sunt reale, uniforme şi continue, 2. funcţiile x, y, z stabilesc o corespondenţă biunivocă şi bicontinuă între punctele M ∈ (Γ) şi mulţimea valorilor parametrului real t ( )),( 21 ttt∈ , 3. admit derivate de ordinul întâi continue.
Relaţiile (1), (2), (3), (4) se numesc respectiv reprezentarea analitică implicită sau ecuaţiile implicite ale arcului simplu de curbă în spaţiu (Γ), reprezentarea analitică explicită sau ecuaţiile explicite ale arcului simplu de curbă în spaţiu (Γ), reprezentarea analitică parametrică sau ecuaţiile parametrice ale arcului simplu de curbă în spaţiu (Γ) şi reprezentarea analitică vectorială sau ecuaţia vectorială a arcului simplu de curbă în spaţiu (Γ).
Observaţia 1. Un arc de curbă simplu admite o infinitate de reprezentări parametrice.
Definiţia 2. Se numeşte arc regulat de curbă în spaţiu o mulţime (Γ) de puncte M din spaţiul 3R , ale căror coordonate x, y, z în raport cu reperul ortonormat { }k ,j ,i ,0=R al lui 3R şi
vectori de poziţie r verifică una din relaţiile (1), (2), (3) sau (4) unde funcţiile F, G, f, g, x, y, z, r satisfac următoarele condiţii numite de regularitate:
1. sunt reale, uniforme şi continue,
2. funcţiile x, y, z, r stabilesc o corespondenţă biunivocă şi bicontinuă între punctele M ∈ (Γ) şi mulţimea valorilor parametrului real t ( )),( 21 ttt∈ ,
3. admit derivate de ordinul întâi continue, nu toate nule,
4. cel puţin unul dintre determinanţii funcţionali (jacobienii):),(),(
zyDGFD ,
),(),(
xzDGFD ,
),(),(
yxDGFD , este diferit de zero.
Definiţia 3. Fie (Γ) un arc regulat de curbă în spaţiu. Se spune că (Γ) este un arc de curbă regulat de ordinul n, sau de clasă n dacă funcţiile F, G, f, g, x, y, z, r din relaţiile (1), (2), (3), (4) admit derivate (parţiale, respectiv ordinare) continue până la şi inclusiv ordinul n > 1, astfel încât nu toate derivatele de acelaşi ordin să se anuleze.
Definiţia 4. Fie ( ) Iii ∈Γ o mulţime de arce de curbă regulate de ordinul n, care au extremităţile, eventual, puncte singulare. Se numeşte curbă regulată de ordinul n, sau de clasă n, reuniunea arcelor ( )iΓ , adică: ( )iIi
Γ∪=Γ∈
)( .
Observaţia 2. În această teorie vor interveni numai curbe regulate de ordinul n, care se vor numi, pe scurt, curbe.

98
Definiţia 5. Se numeşte punct ordinar al curbei în spaţiu (Γ), un punct M ∈ (Γ) în care sunt satisfăcute toate condiţiile de regularitate. În caz contrar (cel puţin una din condiţiile de regularitate nu este satisfăcută), punctul se numeşte singular.
Observaţia 3. Punctele singulare sunt de două categorii: puncte singulare proprii: sunt puncte singulare în orice reprezentare analitică a curbei în spaţiu (Γ) şi puncte singulare improprii: există cel puţin o reprezentare analitică a lui (Γ), în care punctul să nu fie singular. Exemple 1
Să se determine ecuaţia vectorială a curbei situate la intersecţia suprafeţelor:
(Γ) :
=+
=++
.Viviani)curba(,x,a z y x
22
2222
axy
Soluţie: Se observă că această curbă este simetrică faţă de planele (xOy) şi (xOz). Se consideră x = a sin2 t şi se înlocuieşte în cea de-a doua ecuaţie, de unde se obţine:
t2sin 2ay ±= . Prin înlocuirea lui x = a sin2 t şi t2sin
2ay ±= în prima ecuaţie se
obţine:
−−=
4 t2 sin tsin 1 a
2422z , de unde z = ±a cos t. Astfel, ecuaţia vectorială
a unei porţiuni a curbei date este: (Γ) :
++= k t cos j t 2sin
21 i t sin 2ar .
Utilizând cunoştinţele referitoare la plan şi la cuadrice, exemplifică cel puţin două reprezentări analitice implicite ale curbelor în spaţiu .
Să ne reamintim… OO ccuurrbbăă îînn ssppaaţţiiuu ppooaattee ffii rreepprreezzeennttaattăă aannaalliittiicc pprriinn: reprezentarea analitică implicită sau ecuaţiile implicite; reprezentarea analitică explicită sau ecuaţiile explicite; reprezentarea analitică parametrică sau ecuaţiile parametrice; reprezentarea vectorială sau ecuaţia vectorială.
IIIIII..22..44.. LLuunnggiimmeeaa uunnuuii aarrcc rreegguullaatt ddee ccuurrbbăă.. EElleemmeenntt ddee aarrcc
Fie o curbă în spaţiu (Γ) dată în reprezentare vectorială: ) t,(t t (t), rr :)( 21∈=Γ .
Se consideră arcul AB pe această curbă astfel încât A(t = t0 = a) şi B(t = tn = b), unde
a, b ∈ ) t,(t 21 , a < b. Se împarte arcul AB în subarce prin punctele M0 ≡ A, M1, M2, …, Mn-1,
Mn ≡ B. Se formează astfel o linie poligonală înscrisă în arcul AB (fig. 1). Se notează norma vectorului 1+ii MM prin li:
1+= iii MMl , i = 0, 1, 2, ..., n-1.
Definiţia 6. Se numeşte lungime a arcului AB şi se
notează cu s expresia: ∑−
=→∞→
1
00max
limn
ii
ln
li
,
dacă această limită există şi este unică.
Definiţia 7. Un arc de curbă în spaţiu (Γ) se spune că
este rectificabil dacă: ∑−
=→∞→
1
00max
limn
ii
ln
li
există şi este unică, adică dacă arcul (Γ) are o lungime s.
Mi
Mi+1
Mn ≡ B
(Γ)
Fig. 1.
A ≡ M0
M1 . . .
. . .

99
Teorema 1. Fie curba în spaţiu (Γ) dată în reprezentare vectorială: ) t,(t t (t), rr :)( 21∈=Γ şi fie AB un arc pe curba (Γ) astfel încât A(t = t0 = a), B(t = tn = b), a, b ) t,(t 21∈ , a < b. Dacă AB este un arc regulat de curbă, atunci lungimea sa este dată de formula:
∫=b
adttrs
)( , unde: )()( t
dtrdtr = .
Observaţia 4. În cazul în care curba în spaţiu (Γ) este dată în reprezentare parametrică atunci:
)()()()( 222 tztytxtr ++= , rezultă: dttztytxsb
a∫ ++=
222 )()()( .
Teorema 2. Se consideră curba în spaţiu (Γ), regulată, dată în reprezentare vectorială:
) t,(t t (t), rr :)( 21∈=Γ şi fie M0M un arc regulat pe curba (Γ), cu M0 punct fix, M0(t0), iar M un punct curent pe curba (Γ), M(t). Atunci lungimea s a arcului M0M este o funcţie continuă şi derivabilă de parametru t: s = s(t). Observaţia 5. Dacă se consideră curba în spaţiu (Γ) regulată, atunci din condiţiile de regularitate,
rezultă că: 0)()()()( 222 >++== tztytxtrdtds
, deci: s : (t1, t2) → s(t1, t2) ⊆ r ,
este o funcţie surjectivă, strict crescătoare şi continuă, deci bijectivă. În plus, inversa ei: t = t(s),
este continuă şi derivabilă, cu derivata: 0)()(1
>
=
−
stdtdss
dsdt .
Observaţia 6. Fie arcul M0M şi coarda MM0 . Dacă arcul M0M este rectificabil, atunci se
demonstrează uşor că: 1lim0
=∆∆
→ ls
MM, unde ∆s este lungimea arcului M0M, ∆l este lungimea coardei
[MM0], iar punctul M tinde către M0 pe arcul M0M.
Fie (Γ) o curbă în spaţiu dată în reprezentare vectorială: ) t,(t t (t), rr :)( 21∈=Γ . Se consideră M0M un arc regulat pe curba (Γ). Conform teoremei 2, lungimea arcului
M0M este o funcţie continuă şi derivabilă, de parametru t: s = s(t). Definiţia 8. Se numeşte element de arc al curbei în spaţiu (Γ), diferenţiala ds a funcţiei s = s(t).
Teorema 3. Fie (Γ) o curbă în spaţiu regulată şi ds elementul de arc pe (Γ). 1. Dacă (Γ) este dată în reprezentare vectorială: ) t,(t t (t), rr :)( 21∈=Γ , atunci: rdds = . 2. Dacă (Γ) este dată în reprezentare parametrică:
∈===
Γ), t,(t t ),(
),(),(
:)(
21tzztyytxx
atunci:
222 dzdydxds ++= .
Teorema 4. Lungimea de arc s(t) poate fi întrebuinţată ca parametru în reprezentările parametrice ale curbelor din spaţiu regulate. Trecerea de la t la s păstrează clasa reprezentării. Pentru demonstraţiile teoremelor 1-4 a se
P N
M
(T) (Γ)
z
x
y O
M’
)t(r
)tt(r ∆+
R
Fig.2.
j
k
i

100
consulta [11]-pag.90-92. Definiţia 9. Parametrul s este numit parametru natural al curbei în spaţiu (Γ), iar reprezentarea vectorială a curbei: )(:)( srr =Γ , s - parametru natural, se numeşte reprezentare naturală a curbei în spaţiu (Γ). Noţiunea de orientare pe o curbă în spaţiu se introduce în acelaşi mod ca pentru o curbă plană.
Definiţia 10. Se numeşte sens pozitiv de parcurs pe curba în spaţiu:
), t,(t t (t), rr :)( 21∈=Γ sensul care corespunde la valorile crescătoare ale parametrului t. Convenţie. În continuare, derivatele funcţiei vectoriale r în raport cu parametrul natural s se notează cu accente, spre deosebire de derivatele aceleiaşi funcţii în raport cu parametrul t arbitrar, care încă din modulul anterior au fost notate cu puncte.
Să ne reamintim…
Funcţia s(t), lungimea arcului : ∫=b
adttrs
)( dttztytx
b
a∫ ++=
222 )()()( ,
0)()()()( 222 >++== tztytxtrdtds
.
Elementul de arc (liniar): rdds = .
IIIIII..22..55.. Tangenta la o curbă în spaţiu
Definiţia 11. Se numeşte tangentă la curba în spaţiu (Γ) în punctul ordinar M, poziţia limită a dreptei secante MM’ când M’ → M (fig. 2).
Fie curba în spaţiu (Γ) dată în reprezentare vectorială: ) t,(t t (t), rr :)( 21∈=Γ . Se consideră două puncte ordinare M(t), M’(t+∆t), infinit vecine pe curba (Γ), de vectori de
poziţie: t)(t r (t),r ∆+ . Se notează: )()(' trttrrMM −∆+=∆= , t
trttrtrMM
∆−∆+
=∆∆
=)()('' .
Rezultă că vectorii 'MM , ''MM sunt coliniari.
Are loc prin definiţie: )()()(lim0
trt
trttrt
=∆
−∆+→∆
.
Pe de altă parte, când 0→∆r , punctul M’ → M, iar ''MM va tinde către MN , care este vectorul tangent în punctul M la curba în spaţiu (Γ): )(trMN = .
Pentru a găsi ecuaţia vectorială a tangentei se consideră pe tangenta (T) în M la curba în spaţiu (Γ) un punct P, de vector de poziţie R . Are loc relaţia vectorială: MPOMOP += , unde:
)(trMP λ= , R∈λ . Se poate deci scrie: R∈+= λλ ,dtrd(t)rR :)(T .
Aceasta este ecuaţia vectorială a tangentei în punctul ordinar M la curba în spaţiu (Γ).
Observaţia 7. Dacă curba în spaţiu (Γ) este dată în reprezentare parametrică, pentru a scrie ecuaţiile tangentei (T) în punctul ordinar M ∈ (Γ) de coordonate x(t), y(z), z(t), se consideră coordonatele curente X, Y, Z pe (T) şi se obţin ecuaţiile parametrice ale tangentei :

101
+=+=+=
)()(),()(),()(
:)(tztzZtytyYtxtxX
T
λλλ
Prin eliminarea parametrului λ, se obţin ecuaţiile canonice
ale tangentei: )(
)()(
)()(
)(:)(tz
tzZty
tyYtx
txXT
−=
−=
− .
Teorema 5. Fie (Γ) o curbă în spaţiu regulată şi fie (T) tangenta la curba (Γ) într-un punct M ∈ (Γ),
de vector de poziţie r (t).Dacă τ este versorul tangentei (T), atunci: dsrd
=τ ,
unde ds este elementul de arc al curbei (Γ). Pentru demonstraţie a se consulta [11]-pag.94.
Definiţia 12. Fie curba în spaţiu (Γ) şi fie un punct M ∈ (Γ), de vector de poziţie )(tr . Punctul M se numeşte punct de inflexiune al curbei (Γ), dacă toate derivatele vectorului )(tr de la ordinul doi şi până la ordinul 2n sunt coliniare cu derivata de ordinul întâi în M a vectorului )(tr , adică
dacă în punctul M sunt satisfăcute condiţiile:
≠×
==×
+
+
.0)()(
2n, ..., 2, 1,i ,0)()(
12
12
n
n
i
i
dttrd
dttrd
dttrd
dttrd
Definiţia 13. Fie o curbă în spaţiu (Γ), dată în reprezentare vectorială: ) t,(t t (t), rr :)( 21∈=Γ şi fie un punct M ∈ (Γ), de vector de poziţie r (t). Dacă în punctul M este satisfăcută condiţia:
02
2
=×dt
rddtrd , atunci tangenta la curba (Γ) în punctul M se numeşte tangentă staţionară.
Observaţia 8. Din ultimele două definiţii rezultă că tangenta într-un punct de inflexiune este o tangentă staţionară. Reciproca nu este mereu adevărată, adică punctul M ∈ (Γ) prin care trece o tangentă staţionară nu este întotdeauna punct de inflexiune. Exemple 2
Să se determine tangentele la curba în spaţiu: k tj t31i t
21r : )( 234 ⋅+⋅−⋅=Γ
care sunt paralele cu planul: (π) : 3 x – 2 y – 2 z – 1 = 0.
Soluţie: Parametrii directori ai direcţiei unei tangente oarecare la curba dată sunt (2 t3, −t2, 2 t).
Pentru ca tangenta să fie paralelă cu planul dat trebuie ca produsul scalar dintre vectorul director, v (2 t3, −t2, 2 t), al tangentei şi normala la plan, πN (3, −2, −2) să fie zero (cei doi vectori să fie perpendiculari). Adică: 3 ⋅ 2 t3 + 2 t2 – 4 t = 0, cu soluţiile
11 −=t şi 32
2 =t , (pentru t = 0 nu se obţine un punct ordinar al curbei (Γ)).Coordonatele
punctului corespunzător valorii t1 = –1 sunt 21
=x , 31
=y , z = 1 iar parametrii directori ai
direcţiei tangentei în acest punct sunt: (2, 1, 2).Ecuaţiile tangentei în acest punct sunt:
21z
31y 3
41 x2 : )( 1
−=
−=
−T .
În mod analog pentru 32
=t se obţine:1
4z 93
8y 814
8 x81 : )( 2−
=−+
=−T .

102
Determină ecuaţiile tangentei la curba în spaţiu: k tj t i t r : )( 32 ⋅+⋅+⋅=Γ
în punctul M(t=1). R : 3
1z 2
1-y 1
1 x : )( −==
−T .
Să ne reamintim… Fie curba în spaţiu (Γ) dată în reprezentare vectorială: ) t,(t t (t), rr :)( 21∈=Γ . Vectorul tangent în punctul M la curba în spaţiu (Γ): )(tr .
IIIIII..22..66.. Planul normal la o curbă în spaţiu
Definiţia 14. Fie (Γ) o curbă în spaţiu regulată şi fie M ∈ (Γ). Se numeşte plan normal în punctul M la curba în spaţiu (Γ), planul (πN) ce trece prin punctul M şi este perpendicular pe tangenta (T) în M la curba (Γ).
Fie (Γ) o curbă în spaţiu regulată, dată în reprezentare vectorială ( )21 t,t t(t),rr :)( ∈=Γ , M ∈ (Γ) un punct curent de vector de poziţie r (t), (πN) planul normal la curba (Γ) în punctul M.
Pentru a scrie ecuaţia vectorială a planului normal se consideră în acest plan un punct curent P de vector de poziţie R (fig. 3).
Deoarece planul (πN) este perpendicular pe tangenta (T) rezultă că vectorii MP şi MN sunt ortogonali, adică are loc: MP ⋅ MN = 0. Dacă se ţine seama de relaţiile: rROMOPMP −=−= (t), rMN = (t), rezultă ecuaţia vectorială a planului normal în punctul ordinar M la curba în spaţiu (Γ):
( ) ( ) 0(t)r )( : =⋅− trRNπ .
Observaţia 9. Dacă curba în spaţiu (Γ) este dată în reprezentare parametrică atunci, pentru a scrie ecuaţia planului normal se consideră punctul curent M ∈ (Γ) de coordonate x(t), y(t), z(t) şi punctul curent P ∈ (πN) de coordonate X, Y, Z. Rezultă ecuaţia planului normal sub forma:
( ) ( ) ( ) ( ) 0)((t)Z)((t)Y)(x(t)X : =−+−+− tzztyytxN π .
Exemple 3
Fie curba în spaţiu de ecuaţii: (Γ) :
=−+
=−+
0. 4 y x0, 4 z x
22
22
Să se scrie ecuaţiile tangentei şi
ecuaţia planului normal în punctul )1,1,3(M la curba dată.
Soluţie: Parametrii directori ai direcţiei tangentei la (Γ) într-un punct curent sunt proporţionali cu (dx, dy, dz). Prin diferenţierea ecuaţiilor curbei (Γ) se obţine:
P
z
x
y
(T) N
M
(πN)
O
(Γ)
R
r (t)
k
j
Fig. 3.
i
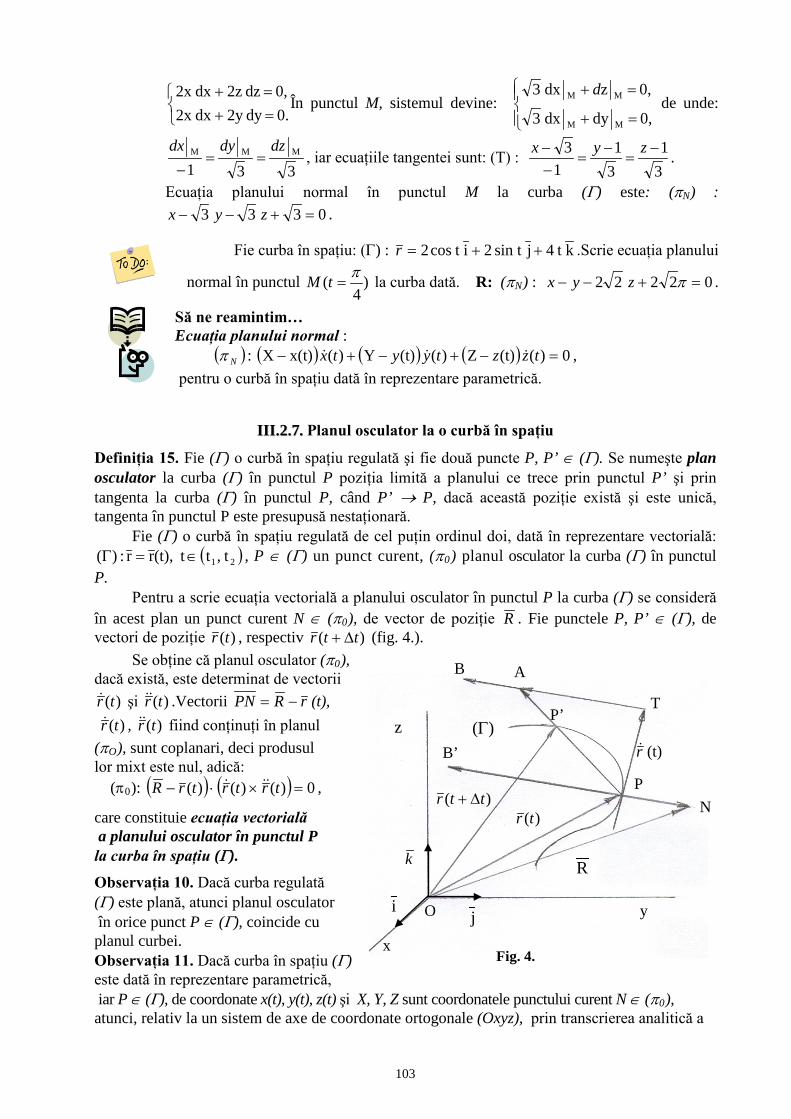
103
=+=+
0. dy 2y dx 2x 0, dz 2z dx 2x
În punctul M, sistemul devine:
=+
=+
0, dy dx3
0, z dx3
MM
MM d de unde:
331MMM dzdydx
==−
, iar ecuaţiile tangentei sunt: (T) : 31
31
13 −
=−
=−− zyx .
Ecuaţia planului normal în punctul M la curba (Γ) este: (πN) : 0333 =+−− zyx .
Fie curba în spaţiu: (Γ) : k t 4 jsin t 2 i t cos2 ++=r .Scrie ecuaţia planului
normal în punctul )4
( π=tM la curba dată. R: (πN) : 02222 =+−− πzyx .
Să ne reamintim… Ecuaţia planului normal :
( ) ( ) ( ) ( ) 0)((t)Z)((t)Y)(x(t)X : =−+−+− tzztyytxN π , pentru o curbă în spaţiu dată în reprezentare parametrică.
IIIIII..22..77.. Planul osculator la o curbă în spaţiu
Definiţia 15. Fie (Γ) o curbă în spaţiu regulată şi fie două puncte P, P’ ∈ (Γ). Se numeşte plan osculator la curba (Γ) în punctul P poziţia limită a planului ce trece prin punctul P’ şi prin tangenta la curba (Γ) în punctul P, când P’ → P, dacă această poziţie există şi este unică, tangenta în punctul P este presupusă nestaţionară.
Fie (Γ) o curbă în spaţiu regulată de cel puţin ordinul doi, dată în reprezentare vectorială: ( )21 t,t t(t),rr :)( ∈=Γ , P ∈ (Γ) un punct curent, (π0) planul osculator la curba (Γ) în punctul
P. Pentru a scrie ecuaţia vectorială a planului osculator în punctul P la curba (Γ) se consideră
în acest plan un punct curent N ∈ (π0), de vector de poziţie R . Fie punctele P, P’ ∈ (Γ), de vectori de poziţie )(tr , respectiv )( ttr ∆+ (fig. 4.). Se obţine că planul osculator (π0), dacă există, este determinat de vectorii
)(tr şi )(tr .Vectorii rRPN −= (t), )(tr , )(tr fiind conţinuţi în planul (πO), sunt coplanari, deci produsul lor mixt este nul, adică: (π0): ( ) ( ) 0)()()( =×⋅− trtrtrR ,
care constituie ecuaţia vectorială a planului osculator în punctul P la curba în spaţiu (Γ).
Observaţia 10. Dacă curba regulată (Γ) este plană, atunci planul osculator în orice punct P ∈ (Γ), coincide cu planul curbei. Observaţia 11. Dacă curba în spaţiu (Γ) este dată în reprezentare parametrică, iar P ∈ (Γ), de coordonate x(t), y(t), z(t) şi X, Y, Z sunt coordonatele punctului curent N ∈ (π0), atunci, relativ la un sistem de axe de coordonate ortogonale (Oxyz), prin transcrierea analitică a
i
k
j
P
B
N
(Γ)
R
)(tr
z
x
y O
A
P’ T
B’ r (t)
)( ttr ∆+
Fig. 4.

104
produsului mixt care apare în ecuaţia vectorială a planului osculator, se obţine ecuaţia scalară a
planului osculator : ( ) 0)()()()()()(
)()()(: =
−−−
tztytxtztytx
tzZtyYtxX
O
π .
Exemple 4
Să se determine punctele curbei în spaţiu: (Γ) : k t 2j )1( )1( 34 −++−= titr ,
ale căror plane osculatoare sunt paralele cu dreapta de ecuaţie: 2z
71y
121x : )( =
−+
=−d .
Soluţie: Ecuaţia planului osculator într-un punct curent M ∈ (Γ), de vector de poziţie )(tr este: (π0) : −(x – t4 + 1) + 2 t(y – t3 − 1) + t3(z + 2 t) = 0.
Pentru ca planul (π0) să fie paralel cu dreapta (d) trebuie să fie îndeplinită condiţia: dN ⊥
0π (vectorul normal la planul osculator: ) t t,2 ,1( 3
0−πN să fie ortogonal pe
vectorul director al dreptei (d) : d (12, −7, 2)), deci: 12 (−1) – 7(2 t) + 2 t3 = 0. Rezultă: t1 = −2, t2 = −1, t3 = 3. Deci : M1(15, −7, 4), M2(0, 0, 2) şi M3(80, 28, −6).
Fie curba în spaţiu de ecuaţie vectorială: k tj t i t r : )( 32 ⋅+⋅+⋅=Γ .Determină
ecuaţiile planelor osculatoare ale curbei date care trec prin punctul )6,31,2( −−M .
R: (π01) : 3x + 3y + z + 1 = 0; (π02) : 3x - 3y + z - 1 = 0; (π03) : 108x - 18y + +z - 216 = 0.
Să ne reamintim…
Ecuaţia scalară a planului osculator : ( ) 0)()()()()()(
)()()(: =
−−−
tztytxtztytx
tzZtyYtxX
O
π ,
pentru o curbă în spaţiu dată în reprezentare parametrică.
IIIIII..22..88.. Normala principală la o curbă în spaţiu
Propoziţia 1. Dacă mI : RR →⊆f este o funcţie vectorială de argument scalar astfel încât constant, (t)f = atunci derivata acesteia este perpendiculară pe vectorul dat.
Teorema 6. Fie curba în spaţiu regulată (Γ) dată în reprezentare vectorială: ( )21 t,t t(t),rr :)( ∈=Γ şi fie (π0), (πN), planul osculator, respectiv planul normal la curba (Γ) în punctul M ∈ (Γ), de vector de poziţie r (t).
Dacă curba (Γ) este regulată de cel puţin ordinul doi şi dacă ds este elementul de arc pe
curba (Γ), atunci vectorul 2
2
dsrd este conţinut atât în planul osculator cât şi în planul normal .
Pentru demonstraţie a se consulta [11]-pag.97.
Definiţia 16. Se numeşte normală principală la curba în spaţiu (Γ), în punctul ordinar M ∈ (Γ), dreapta de intersecţie dintre planul normal (πN) şi planul osculator (π0) duse în punctul M la curba în spaţiu (Γ), adică: )()()( ONpN ππ ∩= .

105
Versorul direcţiei dreptei normale principale (Np) se notează cu υ . Acesta are aceeaşi
direcţie cu 2
2
dsrd , iar sensul lui se ia astfel încât să coincidă cu sensul vectorului 2
2
dsrd , adică:
2
2
dsrdλυ = , λ > 0.
În scopul determinării ecuaţiei vectoriale a dreptei normale principale (Np) se consideră o curbă în spaţiu regulată (Γ) dată în reprezentare vectorială: ( )21 t,t t(t),rr :)( ∈=Γ .
Fie M ∈ (Γ) un punct curent de vector de poziţie )(tr şi (Np) normala principală la curba (Γ) în punctul ordinar M. Se consideră Q ∈ (Np) un punct curent de vector de poziţie R .
Deoarece (Np) ⊂ (π0) rezultă că vectorul care dă direcţia normalei principale este coplanar cu vectorii )(tr şi )(tr care determină planul osculator (π0) în punctul M la curba în spaţiu (Γ), iar din faptul că (Np) ⊂ (πN) rezultă că direcţia normalei principale este ortogonală pe vectorul )(tr , deci direcţia dreptei (Np) este coliniară cu vectorul ( ))()()( trtrtr ×× .
Deoarece rezultăNQM p )(, ∈ ( )[ ]rrrMQ ××= λ , R∈λ ,dar: )(trRMQ −= , rezultă:
(Np): )(trR − ( )[ ]rrr ××= λ , R∈λ ,
care este ecuaţia vectorială a normalei principale în punctul M la curba în spaţiu (Γ).
Observaţia12. Dacă curba (Γ) este dată în reprezentare parametrică, iar M ∈ (Γ), de coordonate x(t), y(t), z(t) şi X, Y, Z sunt coordonatele punctului curent Q ∈ (NP), atunci dacă se transcrie analitic ecuaţia vectorială a normalei principale (Np) se obţin ecuaţiile scalare ale normalei principale:
)()()()(
)()()()(
)()()(
)()()()(
)()()()(
)()()(:)(
tztytzty
tytxtytx
txtztyY
tytxtytx
txtztxtz
tztytxXN p
−=
−
)()()()(
)()()()(
)()()(
txtztxtz
tztytzty
tytxtzZ
−= .
Exemple 5
Se consideră curba în spaţiu: (Γ) :
=
=
=−
tz 2
,e y ,e x t
t
şi punctul M (t = 0) pe curbă. Se cer
ecuaţiile normalei principale în M la (Γ). Soluţie: Se obţine M(1, 1, 0) ; kjeietr tt 2)( +−= − ; jeietr tt −+=)( .
Rezultă kjir 2)0( +−= ; jir +=)0( ,de unde υ = )(2
1 ji + . Ecuaţiile normalei
principale în M la (Γ)sunt : =−
=−
11
11:)( YXN p 0
Z , deci (Np):
==
0,0y-x
z .
Fie curba în spaţiu de ecuaţie vectorială:(Γ) : k t 4 jsin t 3 i t cos3 ++=r .Scrie ecuaţiile normalei principale în punctul curent M al curbei date.
R:t
tYt
tXN p sinsin3
coscos3:)(
−−
=−− , tZ 4= .

106
Să ne reamintim… Ecuaţiile scalare ale normalei principale: :)( pN
)()()()(
)()()()(
)()()(
)()()()(
)()()()(
)()()(
tztytzty
tytxtytx
txtztyY
tytxtytx
txtztxtz
tztytxX
−=
− =
)()()()(
)()()()(
)()()(
txtztxtz
tztytzty
tytxtzZ
− ,
pentru o curbă în spaţiu dată în reprezentare parametrică.
IIIIII..22..99.. Binormala la o curbă în spaţiu
Definiţia 17. Se numeşte binormală la curba în spaţiu (Γ) în punctul ordinar M ∈ (Γ), dreapta (Nb) ce trece prin M, perpendiculară pe planul osculator (πO) al punctului considerat.
În scopul determinării ecuaţiei vectoriale a dreptei binormale (Nb) se consideră curba în spaţiu (Γ) dată în reprezentare vectorială: ( )21 t,t t(t),rr :)( ∈=Γ .Fie M ∈ (Γ) un punct curent de vector de poziţie )(tr şi (Nb) binormala la curba (Γ) în punctul ordinar M. Se consideră Q ∈ (Nb) un punct curent de vector de poziţie R .
Deoarece binormala (Nb) la curba în spaţiu (Γ) în punctul ordinar M este prin definiţie perpendiculară pe planul osculator (π0), determinat de vectorii r (t), r (t), rezultă că direcţia dreptei binormale este coliniară cu produsul vectorial r (t) × r (t). Deci are loc:
( ))()( trtrMQ ×= λ , R∈λ . Dacă se ţine seama de relaţia: rRMQ −= (t),
se obţine ecuaţia vectorială a binormalei în punctul ordinar M la curba în spaţiu (Γ):
( ))()()(:)( trtrtrRNb ×=− λ , R∈λ .
Observaţia 13. Dacă punctul ordinar M ∈ (Γ) nu este un punct de inflexiune, sau nu aparţine unui segment, iar curba în spaţiu (Γ) este de clasă cel puţin 2, atunci planul osculator în M este unic determinat şi de aici (Np) şi (Nb) sunt unic determinate.
Observaţia 14. În cazul în care curba (Γ) este dată în reprezentare parametrică, iar M ∈ (Γ), de coordonate x(t), y(t), z(t) şi X, Y, Z sunt coordonatele punctului curent Q ∈ (Nb), atunci prin transcrierea analitică a ecuaţiei vectoriale a binormalei în punctul M la curba în spaţiu (Γ), se obţin ecuaţiile
scalare ale binormalei:
)()()()(
)(
)()()()(
)(
)()()()(
)(:)(
tytxtytx
tzZ
txtztxtz
tyY
tztytzty
txXNb
−=
−=
− .
Definiţia 18. Se numeşte versor binormal la curba în spaţiu (Γ), în punctul ordinar M ∈ (Γ), vectorul unitar al dreptei binormale, notat cu β , orientat astfel încât ansamblul { }βυτ ,,,M să formeze un reper orientat ca şi reperul { }kji ,,,0 .
Din această definiţie rezultă că: υτβ ×= . Exemple 6
Să se determine punctele de pe curba în spaţiu: (Γ) : k t j t ln i 2 2−+=t
r
ale căror binormale să fie paralele cu planul de ecuaţie: (π) : x – y + 8 z + 2 = 0.
Soluţie: Vectorul director al binormalei în punctul M ∈ (Γ), de vector de poziţie )(tr
este (t)r )( ×tr . k t 2j 1 2)( 2 −+−=t
it
tr , k 2j 1 4)( 23 −−=t
it
tr ,
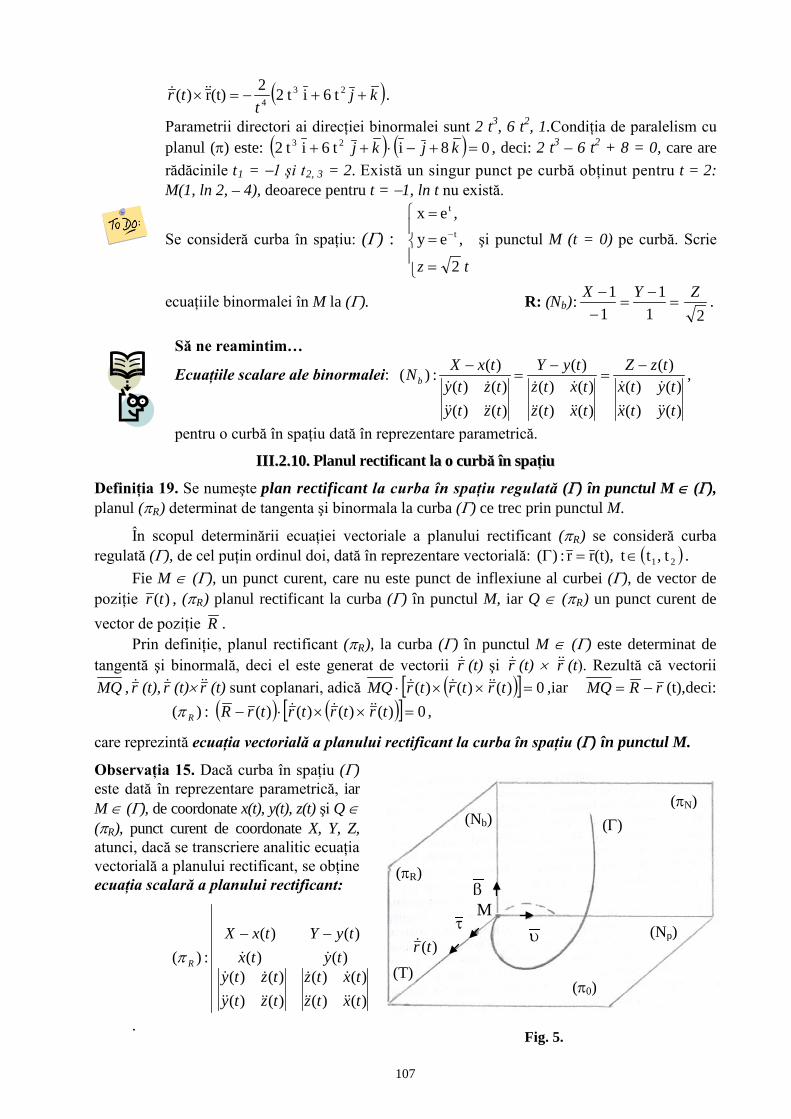
107
( )kjt
tr ++−=× 234 t6i t22(t)r )( .
Parametrii directori ai direcţiei binormalei sunt 2 t3, 6 t2, 1.Condiţia de paralelism cu planul (π) este: ( ) ( ) 0 8i t6i t2 23 =+−⋅++ kjkj , deci: 2 t3 – 6 t2 + 8 = 0, care are rădăcinile t1 = −1 şi t2, 3 = 2. Există un singur punct pe curbă obţinut pentru t = 2: M(1, ln 2, – 4), deoarece pentru t = −1, ln t nu există.
Se consideră curba în spaţiu: (Γ) :
=
=
=−
tz 2
,e y ,e x t
t
şi punctul M (t = 0) pe curbă. Scrie
ecuaţiile binormalei în M la (Γ). R: (Nb) =−
=−−
11
11: YX
2Z .
Să ne reamintim…
Ecuaţiile scalare ale binormalei:
)()()()(
)(
)()()()(
)(
)()()()(
)(:)(
tytxtytx
tzZ
txtztxtz
tyY
tztytzty
txXNb
−=
−=
− ,
pentru o curbă în spaţiu dată în reprezentare parametrică.
IIIIII..22..1100.. Planul rectificant llaa oo ccuurrbbăă îînn ssppaaţţiiuu
Definiţia 19. Se numeşte plan rectificant la curba în spaţiu regulată (Γ) în punctul M ∈ (Γ), planul (πR) determinat de tangenta şi binormala la curba (Γ) ce trec prin punctul M.
În scopul determinării ecuaţiei vectoriale a planului rectificant (πR) se consideră curba regulată (Γ), de cel puţin ordinul doi, dată în reprezentare vectorială: ( )21 t,t t(t),rr :)( ∈=Γ .
Fie M ∈ (Γ), un punct curent, care nu este punct de inflexiune al curbei (Γ), de vector de poziţie )(tr , (πR) planul rectificant la curba (Γ) în punctul M, iar Q ∈ (πR) un punct curent de vector de poziţie R .
Prin definiţie, planul rectificant (πR), la curba (Γ) în punctul M ∈ (Γ) este determinat de tangentă şi binormală, deci el este generat de vectorii r (t) şi r (t) × r (t). Rezultă că vectorii MQ , r (t), r (t)× r (t) sunt coplanari, adică ( )[ ] 0)()( )( =××⋅ trtrtrMQ ,iar rRMQ −= (t),deci:
( ) ( )[ ] 0)()( )( )(:)( =××⋅− trtrtrtrRRπ ,
care reprezintă ecuaţia vectorială a planului rectificant la curba în spaţiu (Γ) în punctul M.
Observaţia 15. Dacă curba în spaţiu (Γ) este dată în reprezentare parametrică, iar M ∈ (Γ), de coordonate x(t), y(t), z(t) şi Q ∈ (πR), punct curent de coordonate X, Y, Z, atunci, dacă se transcriere analitic ecuaţia vectorială a planului rectificant, se obţine ecuaţia scalară a planului rectificant:
0
)()()()(
)()()()(
)()()()(
)()()()()()(
:)( =−−−
tytxtytx
txtztxtz
tztytzty
tztytxtzZtyYtxX
R
π
.
(πN)
(π0)
(πR)
(Nb)
(Np) M
τ
β
υ )(tr
(T)
Fig. 5.
(Γ)

108
IIIIII..22..1111.. TTrriieeddrruull lluuii FFrreenneett Fie (Γ) o curbă în spaţiu regulată de cel puţin ordinul doi şi M un punct al curbei (Γ) care
nu aparţine unui arc segment de dreaptă a lui (Γ) şi nu este punct inflexionar al acesteia. În aceste ipoteze s-au ataşat, în mod unic, la curba (Γ) în punctul M, trei versori: versorul tangent τ , versorul normal principal υ , respectiv versorul binormal β . Definiţia 20. Ansamblul { }βυτ ,,,M ataşat curbei în spaţiu (Γ) în punctul M ∈ (Γ) se numeşte reperul mobil al lui Frenet. Definiţia 21. Se numeşte triedrul lui Frenet ataşat curbei în spaţiu (Γ) în punctul M ∈ (Γ), triedrul drept determinat de versorii τ , υ , β (fig. 5.).Planele acestui triedru sunt (πO), (πN), (πR), ale căror ecuaţii se pot rescrie şi sub forma: [ ] 0)()(:)( =⋅− ssrRO βπ ,
[ ] 0)()(:)( =⋅− ssrRN τπ , [ ] 0)()(:)( =⋅− ssrRR υπ , iar muchiile triedrului lui Frenet sunt
(T), (Np), (Nb). τ , υ , β sunt daţi prin formulele:)()()(
trtrt
=τ , ( )
( ) )()()()()()()(
trtrtrtrtrtrt
××××
=υ ,
)()()()()(
trtrtrtrt
××
=β ,dacă curba (Γ) este dată: ( )21 t,t t(t),rr :)( ∈=Γ ,cu t parametru oarecare.
Exemple 7
Fie curba în spaţiu: (Γ): 0 t,kln t j 2 2 >++= titr . Să se determine ecuaţiile muchiilor şi feţelor triedrului Frenet în punctul P(2, 1, 0).
Soluţie: Pe curba (Γ) punctul P corespunde la valoarea t = 1 a parametrului. Vectorul director al tangentei în P este: k j 2i 2)( ++=Ptr ,iar ecuaţiile tangentei în P la
curba (Γ) sunt: 1z
21y
22x : )( =
−=
−T . Planul normal are drept vector normal
=N k j 2i 2)( ++=Ptr şi ecuaţia:(πN) : 2 x + 2 y + z – 6 = 0. Planul osculator
conţine punctul P şi este determinat de vectorii Ptr )( , Ptr )( , ecuaţia sa este: (π0) : 2 x – y – 2 z – 3 = 0. Dreapta binormală este perpendiculară pe planul osculator în P, deci are vectorul director )2 ,1 ,2( −−PN , rezultă ecuaţiile: (Nb) :
2z
11y
22x
−=
−−
=− .Normala principală se află la intersecţia dintre planul normal şi
planul osculator, şi are ecuaţiile: (Np) :
=−−−=−++
.03 2 2,06zy 2 x2
zyx Planul rectificant
conţine dreapta tangentă şi dreapta binormală iar ecuaţia sa : (πR) : x – 2 y + 2 z = 0.
Determină versorii τ , υ , β ai tangentei, normalei principale şi binormalei în punctul M (t = 0) pentru curba în spaţiu: (Γ) : kejtitr t++= 2 .
R: τ [ ];k i 22
+= υ [ ];k j 4i -62
++= β [ ].k2 j -i 2-31
+=
Să ne reamintim… Planele triedrului lui Frenet: (πO), (πN), (πR), muchiile triedrului lui Frenet:(T), (Np), (Nb), iar vectorii reperului mobil al lui Frenet: τ , υ , β :
)()()(
trtrt
=τ , ( )
( ) )()()()()()()(
trtrtrtrtrtrt
××××
=υ , )()()()()(
trtrtrtrt
××
=β ,
pentru o curbă dată în reprezentare vectorială.

109
IIIIII..22..1122.. CCuurrbbuurrăă.. TToorrssiiuunnee
Definiţia 22. Fie (Γ) o curbă în spaţiu regulată, M ∈ (Γ) un punct curent pe curba (Γ) şi (S) o sferă cu centrul în O şi de rază egală cu unitatea. Se consideră vectorul tangentei τ în punctul M şi fie ττ == *'OM un vector cu originea în O şi extremitatea în M’ ∈ (S), echipolent cu τ . Când punctul M va parcurge curba (Γ) în sens pozitiv, punctul M’ va descrie pe sfera (S) o curbă (Γ1) (fig.6).Se numeşte indicatoare sferică a tangentelor, curba în spaţiu (Γ1) astfel definită.
Fig. 6. Fie M1 un alt punct al curbei regulate (Γ), (Γ1) indicatoarea sferică a tangentelor şi M’,
M1’ ∈ (Γ1), două puncte pe curba (Γ1), corespunzătoare punctelor M şi M1 (fig. 6).
Se notează cu ∆s lungimea arcului MM1 ⊂ (Γ) şi cu ∆σ lungimea arcului M’M1’ ⊂ (Γ1).
Definiţia 23. Se numeşte curbură medie a arcului MM1, raportul: s∆
∆σ .
Observaţia 16. Curbura medie se notează cu Km(MM1). Definiţia 24. Se numeşte curbura curbei în spaţiu (Γ) în punctul M, limita curburii
medii a arcului MM1 când M1 → M, dacă această limită există şi este finită. Observaţia 17. Curbura curbei în spaţiu (Γ) în punctul M se notează prin K.Deci:
dsd
sK
s
σσ=
∆∆
=→∆ 0
lim .
Definiţia 25. Se numeşte rază de curbură a curbei în spaţiu (Γ) în punctul M, inversa curburii curbei (Γ) în punctul M.
Observaţia 18. Raza de curbură se notează cu R. Deci: σd
dsK
R ==1 .
Teorema 7. Fie (Γ) o curbă în spaţiu regulată, M, M1 ∈ (Γ) şi fie M’, M’1 ∈ (Γ1) punctele corespunzătoare punctelor M, M1 (fig. 6). Dacă se notează cu ∆s lungimea arcului
MM1 ⊂ (Γ), cu ∆σ lungimea arcului M’M’1 ⊂ (Γ1) şi cu ∆θ unghiul versorilor τ şi 1τ ai
tangentelor la curba (Γ) duse în M, respectiv M1, atunci: dsdK θ
= .
Definiţia 26. Se numeşte unghi de contingenţă al tangentelor, unghiul ∆θ format de versorii tangentelor la curba (Γ) duse în punctele M, respectiv M1 ale curbei (Γ).
Definiţia 27. Fie (Γ) o curbă în spaţiu regulată şi M un punct curent pe (Γ). Fie (S) sfera unitate cu centrul în O. Dacă β este versorul binormalei în M, se consideră vectorul ββ == *'OM un vector echipolent cu β , cu originea în O şi extremitatea în M’ ∈ (S). Când punctul M descrie
(Γ) 1τ
∆s
τ
M
M1
M’1 M’
∆θ
O
*1τ *τ
∆σ
(Γ1)
(S)
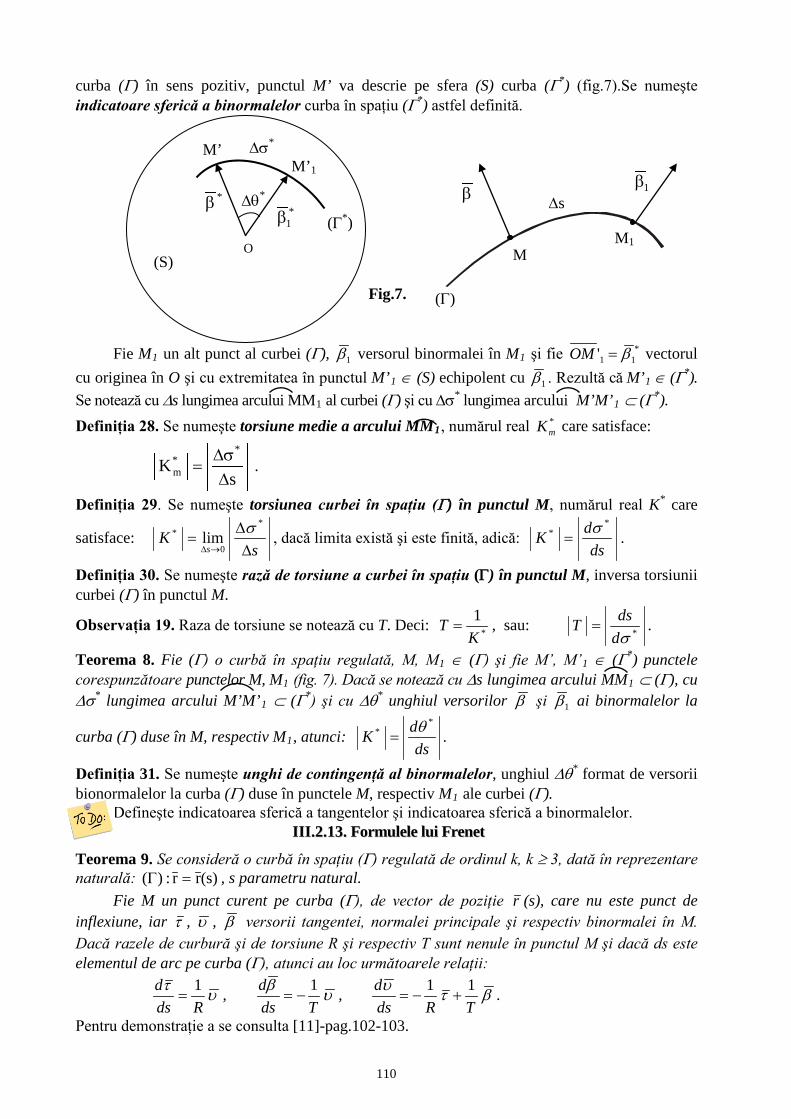
110
curba (Γ) în sens pozitiv, punctul M’ va descrie pe sfera (S) curba (Γ*) (fig.7).Se numeşte indicatoare sferică a binormalelor curba în spaţiu (Γ*) astfel definită.
Fig.7. Fie M1 un alt punct al curbei (Γ), 1β versorul binormalei în M1 şi fie 1'OM *
1β= vectorul cu originea în O şi cu extremitatea în punctul M’1 ∈ (S) echipolent cu 1β . Rezultă că M’1 ∈ (Γ*). Se notează cu ∆s lungimea arcului MM1 al curbei (Γ) şi cu ∆σ* lungimea arcului M’M’1 ⊂ (Γ*).
Definiţia 28. Se numeşte torsiune medie a arcului MM1, numărul real *mK care satisface:
s
K*
*m ∆
σ∆= .
Definiţia 29. Se numeşte torsiunea curbei în spaţiu (Γ) în punctul M, numărul real K* care
satisface: s
Ks ∆
∆=
→∆
*
0
* lim σ , dacă limita există şi este finită, adică: ds
dK*
* σ= .
Definiţia 30. Se numeşte rază de torsiune a curbei în spaţiu (Γ) în punctul M, inversa torsiunii curbei (Γ) în punctul M.
Observaţia 19. Raza de torsiune se notează cu T. Deci: *
1K
T = , sau: *σddsT = .
Teorema 8. Fie (Γ) o curbă în spaţiu regulată, M, M1 ∈ (Γ) şi fie M’, M’1 ∈ (Γ*) punctele corespunzătoare punctelor M, M1 (fig. 7). Dacă se notează cu ∆s lungimea arcului MM1 ⊂ (Γ), cu ∆σ* lungimea arcului M’M’1 ⊂ (Γ*) şi cu ∆θ* unghiul versorilor β şi 1β ai binormalelor la
curba (Γ) duse în M, respectiv M1, atunci: ds
dK*
* θ= .
Definiţia 31. Se numeşte unghi de contingenţă al binormalelor, unghiul ∆θ* format de versorii bionormalelor la curba (Γ) duse în punctele M, respectiv M1 ale curbei (Γ).
Defineşte indicatoarea sferică a tangentelor şi indicatoarea sferică a binormalelor. IIIIII..22..1133.. FFoorrmmuulleellee lluuii FFrreenneett
Teorema 9. Se consideră o curbă în spaţiu (Γ) regulată de ordinul k, k ≥ 3, dată în reprezentare naturală: (s)rr :)( =Γ , s parametru natural.
Fie M un punct curent pe curba (Γ), de vector de poziţie r (s), care nu este punct de inflexiune, iar τ , υ , β versorii tangentei, normalei principale şi respectiv binormalei în M. Dacă razele de curbură şi de torsiune R şi respectiv T sunt nenule în punctul M şi dacă ds este elementul de arc pe curba (Γ), atunci au loc următoarele relaţii:
υτRds
d 1= , υβ
Tdsd 1
−= , βτυTRds
d 11+−= .
Pentru demonstraţie a se consulta [11]-pag.102-103.
∆θ* *β *
1β
∆σ*
(Γ*)
1β β
(Γ)
∆s
M1 M
M’ M’1
O (S)

111
Definiţia 32. Egalităţile obţinute în teorema 9, se numesc formulele lui Frenet relative la curba în spaţiu (Γ).
Scrie formulele lui Frenet relative la o curbă în spaţiu.
Să ne reamintim… Formulele lui Frenet relative la o curbă în spaţiu:.
υτRds
d 1= , υβ
Tdsd 1
−= , βτυTRds
d 11+−= .
IIIIII..22..1144.. CCaallccuulluull ccuurrbbuurriiii şşii aall ttoorrssiiuunniiii
Teorema 10. Fie (Γ) o curbă în spaţiu, regulată de ordinul k, k ≥ 2. Condiţia necesară şi suficientă ca această curbă să fie o dreaptă este: K = 0.
Teorema 11. Fie (Γ) o curbă în spaţiu, regulată de ordinul k, k ≥ 2, fără puncte singulare şi
astfel încât K > 0. (Γ) este curbă plană dacă şi numai dacă 01=
T.
Teorema 12. Fie (Γ) o curbă în spaţiu regulată de ordinul k, k ≥ 3, M ∈ (Γ) un punct curent, ds elementul de arc pe curba (Γ), iar R raza de curbură a curbei (Γ) în punctul M. 1. Dacă curba (Γ) este dată în reprezentare vectorială naturală: (s)rr :)( =Γ , s parametru natural,
iar M ∈ (Γ) este vector de poziţie )(sr , atunci: )('')('1 srsrR
K ×== .
2. Dacă curba (Γ) este dată în reprezentare vectorială oarecare: ( )21 t,t t(t),rr :)( ∈=Γ ,
iar M ∈ (Γ) este vector de poziţie )(tr , atunci: 3)(
)()(1
tr
trtrR
K
×== .
Observaţia 20. Din teorema 12, ca şi din definiţia 24 rezultă: curbura K într-un punct M ∈ (Γ) este un număr real nenegativ.
Teorema 13. Fie (Γ) o curbă în spaţiu regulată de ordinul k, k ≥ 3, M ∈ (Γ) un punct curent, ds elementul de arc pe curba (Γ), iar K* torsiunea curbei (Γ) în punctul M. 1. Dacă curba (Γ) este dată în reprezentare vectorială naturală: (s)rr :)( =Γ , s parametru natural,
iar M ∈ (Γ) este de vector de poziţie r (s), atunci: ( )2
*
)('')(')(''',')'(),('1
srsrsrsrsr
TK
×== .
2.Dacă curba (Γ) este dată în reprezentare vectorială oarecare: ( )21 t,t t(t),rr :)( ∈=Γ ,
iar M ∈ (Γ) este de vector de poziţie r (t), atunci: ( )2
*
)()(
)(),(),(1
trtr
trtrtrT
K
×== .
Pentru demonstraţii a se consulta [11]-pag.109. Exemple 8
Se consideră curba în spaţiu: (Γ) :
∈=−+
=−+
,)z y, x,(,0,0
3222
222
Rrzyryx

112
şi pe ea punctul
22 ,
22 ,
22 rrrP . Să se determine curbura şi torsiunea curbei în
P.
Soluţie: O reprezentare parametrică a curbei este: (Γ) :
===
.cos,sin,cos
trztrytrx
Punctul P
corespunde valorii parametrului 4π
=t . Se calculează în P:22)( rtx P −= ,
22)( rtx P −= ,
22)( rtx P = ,
22)( rty P = ,
22)( rty P −= ,
22)( rty P −= ,
22)( rtz P −= ,
22)( rtz P −= ,
22)( rtz P = .
Curbura este: =PR
1r33
4 .Torsiunea este: 02
014 ==
rpT.
Rezultă că în punctul P curba în spaţiu (Γ) se comportă ca o curbă plană.
Fie dată curba în spaţiu:
∈++=
++=
++=
Γ
.,342,234,423
:)(3
3
3
Rtttzttyttx
Arată că este plană şi
găseşte ecuaţia planului care o conţine. R: ;0* =K (π0) : x + 10 y – 8 z – 27 = 0.
Să ne reamintim…
curbura curbei: 3)(
)()(
tr
trtrK
×= , torsiunea curbei: ( )
2*
)()(
)(),(),(
trtr
trtrtrK
×= .
IIIIII..22..1155.. CCllaassee rreemmaarrccaabbiillee ddee ccuurrbbee îînn ssppaaţţiiuu
Definiţia 33. O curbă în spaţiu a cărei tangentă formează în orice punct unghi constant cu o direcţie fixă, se numeşte elice.
Teorema 14. Fie (Γ) o curbă în spaţiu regulată de ordinul k, k ≥ 2, pentru care K > 0. (Γ) este
elice dacă şi numai dacă: constant*
=KK .
Pentru demonstraţie a se consulta [29]-pag.126-127.
Exemple 9
Se consideră curba în spaţiu: (Γ) : 0 ,k t bj )ln t (sin )ln (cost >++= tatitar .Să se demonstreze că este o elice .
Soluţie: Se arată că raportul dintre curbură şi torsiune, în orice punct al curbei este

113
constant. =)(tr [ ] [ ] k bj )ln t sin()ln (cos a )ln t cos()ln (sin ++++− ataiataa ,
k 0j )ln t (cos ta)ln (sin )ln t (sin
ta)ln (cos )(
22
⋅+
+−+
−−= ata
taiata
tatr
[ ] +
+−−+= iata
taata
tatr )ln t (cos
ta)ln (sin
ta)ln t (sin )ln (cos a )(
2
2
[ ] j )ln t (sin ta)ln (cos
ta)ln t (cos )ln (sin a
2
2
+−+−+ ata
taata
ta ,
++=
+++
=
t)1(1
t)1(11
22
22
2
baab
T
baaa
R b
aRT 21+=⇒ nu depinde de t (este constant).
Fie curba în spaţiu:(Γ):
=
=
.6xay, 2x
23
2
za Demonstrează că ea este o elice. R: .1
*
=KK
Definiţia 34. Se numeşte curbă Ţiţeica o curbă în spaţiu pentru care, în orice punct al curbei are loc relaţia: T ⋅ d2 = constant ,unde T este raza de torsiune a curbei în punctul curent şi d este distanţa de la un punct fix la planul osculator (π0) ataşat curbei (Γ).
Exemple 10
Să se arate că (Γ) :
=−
=−
,0,01
2 xyxyz
este o curbă Ţiţeica.
Soluţie: Se consideră o reprezentare parametrică a curbei în spaţiu (Γ):
≠=
==
− .0,,,
3
2
ttztytx
k t3 j i t 2)( 4−−+=tr , k t12 i 2)( 5−+=tr , k t60)( 6−−=tr ,
k 2j t30i t12(t)r )( 45 −−=× −− tr , 4 t900 t144(t)r )( 810 ++=× −− tr ,
( ) 6 t120)(r ,)(r ),( −=tttr , iar: 36 t225
t301210
4
++=
tT.
(π0) : 6 x – 15 t y – t5 z + 10 t2 = 0, 36 t225
t10210
2
++=
td . Produsul
310 2 =⋅ dT ,
fapt care dovedeşte că această curbă este o curbă Ţiţeica.
Se consideră curba în spaţiu: (Γ) : kejeier ttt 2)3 t sin( )3 t cos( −++= .
Dovedeşte că această curbă este o curbă Ţiţeica. R: 2
33 2 =⋅ dT .
Să ne reamintim…
(Γ) este elice dacă şi numai dacă: constant*
=KK .
Se numeşte curbă Ţiţeica o curbă în spaţiu pentru care, în orice punct al curbei are loc relaţia: T ⋅ d2 = constant ,unde T este raza de torsiune a curbei în punctul curent şi d este distanţa de la un punct fix la planul osculator (π0) ataşat curbei (Γ).

114
IIIIII..22..1166.. Rezumat În cadrul acestei unităţi de învăţare se introduc diferitele reprezentări analitice ale curbelor în spaţiu, se definesc şi se caracterizează noţiunile de: lungime a unui arc regulat de curbă şi element de arc. Se prezintă în continuare muchiile şi feţele triedrului lui Frenet: dreptele: tangentă, normală principală şi binormală, planele: normal, osculator şi rectificant, precum şi versorii lui Frenet. În final, se definesc şi se caracterizează curbura şi torsiunea unei curbe în spaţiu, se introduc şi se studiază două clase remarcabile de curbe în spaţiu: curbele elice şi curbele Ţiţeica.
IIIIII..22..1177.. Test de autoevaluare a cunoştinţelor 1. Defineşte noţiunile de: punct ordinar şi punct singular al unui arc de curbă în
spaţiu. 2. Defineşte reperul mobil al lui Frenet şi scrie formulele de calcul ale
versorilor lui Frenet. 3. Defineşte şi reprezintă grafic triedrul lui Frenet ataşat unei curbe în spaţiu. 4. Scrie formulele de calcul ale curburii şi ale torsiunii unei curbe în spaţiu. 5. Continuă teorema: Fie (Γ) o curbă în spaţiu regulată de ordinul k, k ≥ 2, pentru
care K > 0. (Γ) este elice dacă şi numai dacă… 6. Determină ecuaţiile dreptei tangente, ecuaţia planului normal şi versorii τ , υ ,
β în punctul M(1, 21,
31 ) al curbei în spaţiu:(Γ) :
==
.1 2xz,03y - x3
7. Demonstrează că (Γ) este o elice: (Γ) : .k 6
j 2
i t 32 ttr ++= .
IIIIII..22..1188.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree
11.. RReevveezzii ppaarraaggrraaffuull IIIIII..22..33..-- ddeeffiinniiţţiiaa 55.. 22.. RReevveezzii ppaarraaggrraaffuull IIIIII..22..1111 ..-- ddeeffiinniiţţiiaa 2211 şşii formulele de calcul ale versorilor lui Frenet. 33.. RReevveezzii ddeeffiinniiţţiiaa 2200.. şşii ffiigguurraa 55.. 44.. RReevveezzii tteeoorreemmeellee 1122.. şşii 1133..
55.. RReevveezzii tteeoorreemmaa 1144.. 6.1-
1- 2z3
13y1
1x : )( =−
=−T ;(πN):12x+12y-6z–13=0;
τ [ ]k-j2 i2 31
+= ; υ [ ]k2 j 2i -31
++= β [ ]k2 j -i 231
+= . 7. .1*
=KK
115
Unitatea de învăţare III.3. Elemente de geometrie diferenţială a suprafeţelor
Cuprins III.3.1. Introducere ................................................................................................................. 115
III.3.2. Competenţe ................................................................................................................ 115 III.3.33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa uunneeii ssuupprraaffeeţţee ........................................................................................................................................ 111155 IIIIII..33..44.. CCuurrbbee ttrraassaattee ppee oo ssuupprraaffaaţţăă.. CCuurrbbee ccoooorrddoonnaattee .................................................................................................................................. 111177 IIIIII..33..55.. PPllaannuull ttaannggeenntt şşii nnoorrmmaallaa llaa oo ssuupprraaffaaţţăă ............................................................................................................................................................ 112200 IIIIII..33..66.. PPrriimmaa ffoorrmmăă ffuunnddaammeennttaallăă aa uunneeii ssuupprraaffeeţţee.. AApplliiccaaţţiiii aallee aacceesstteeiiaa ...................................................................... 112233 IIIIII..33..77.. Rezumat ...................................................................................................................... 127 IIIIII..33..88.. Test de autoevaluare ................................................................................................... 127 III.3.9. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree .......................................................................................................... 112277
III.3.1. Introducere
În cadrul acestei unităţi de învăţare se introduc reprezentările analitice ale suprafeţelor şi se studiază principalele proprietăţi geometrice ale acestora. Studiul curbelor trasate pe o suprafaţă se bazează pe cunoştinţele dobândite în cadrul unităţii de învăţare III.2, referitoare la curbele în spaţiu.
III.3.2 Competenţele unităţii de învăţare:
După parcurgerea materialului studentul va fi capabil : -să identifice şi să exemplifice diversele reprezentări analitice ale suprafeţelor; -să exemplifice şi să studieze curbele trasate pe o suprafaţă; -să definească şi să caracterizeze planul tangent şi normala la o suprafaţă ; -să determine primă formă fundamentală a unei suprafeţe şi aplicaţiile acesteia şi să le utilizeze în exerciţii.
Durata medie de parcurgere a acestei unităţi de învăţare este de 3 ore.
IIIIII..33..33.. RReepprreezzeennttaarreeaa aannaalliittiiccăă aa uunneeii ssuupprraaffeeţţee Definiţia 1. Se numeşte porţiune simplă de suprafaţă, o mulţime (Σ) de puncte M din spaţiu ale căror coordonate x, y, z în raport cu reperul ortonormat { }k ,j ,i ,0=R al lui 3R şi ai căror vectori de poziţie r satisfac una din următoarele ecuaţii:
(Σ) : F(x, y, z) = 0, (x, y, z) ∈ D ⊆ 3R , (1)
(Σ) : z = f(x, y), (x, y) ∈ D’ ⊆ 2R , (2)
(Σ) :
×∈===
), v,(v )u ,(u ),( ),,(),,(),,(
2121vuvuzzvuyyvuxx
(3)
(Σ) : ) v,(v)u ,(u v)(u, v),(u, rr 2121 ×∈= , (4) unde F, f, x, y, z, r satisfac condiţiile:
(a) sunt funcţii continue, (b) funcţiile x, y, z şi r stabilesc o corespondenţă biunivocă şi bicontinuă între punctele M
∈ (Γ) şi perechile ordonate de numere reale (u, v), ( )) v,(v )u ,(u ) v,( 2121 ×∈u , (c) admit derivate parţiale de ordinul întâi, continue.

116
Relaţiile (1), (2), (3), (4) se numesc respectiv: reprezentarea analitică implicită sau ecuaţia implicită a porţiunii simple de suprafaţă; reprezentarea analitică explicită sau ecuaţia explicită a porţiunii simple de suprafaţă; reprezentarea analitică parametrică sau ecuaţiile parametrice ale porţiunii simple de suprafaţă; reprezentarea vectorială sau ecuaţia vectorială a porţiunii simple de suprafaţă.
Exemple 1
1.
[ ] [ ] [ ] 32
2
2
2
2
2
,,,),,(),0,,(,01:)( R⊂−×−×−∈>=−++ ccbbaazyxcbacz
by
axE ,
constituie ecuaţia implicită a elipsoidului.
2. 22
2
2
2
),(),0,(,:)( R∈>+= yxbaby
axzPE ,
constituie ecuaţia explicită a paraboloidului eliptic.
3.
∈=
==
,),(,,,
:)(22 Rvuuz
vshbuyvchaux
PH
constituie ecuaţiile parametrice ale paraboloidului hiperbolic. 4. ]2,0[,,sincos:)( 1 π∈∈+⋅+⋅= vukushcjvuchbivucharH R , constituie ecuaţia vectorială a hiperboloidului cu o pânză.
Observaţia 1. O porţiune simplă de suprafaţă admite o infinitate de reprezentări parametrice. Într-adevăr, dacă u = u(u*, v*) şi v = v(u*, v*), u*, v* sunt parametri reali, atunci reprezentarea
parametrică (3) devine: (Σ) :
=
=
=
. ),(,),(,),(
***
***
***
vuzzvuyyvuxx
Definiţia 2. Se numeşte porţiune regulată de suprafaţă, o mulţime (Σ) de puncte M din spaţiu ale căror coordonate x, y, z în raport cu reperul ortonormat { }k ,j ,i ,0=R al lui 3R şi ai căror vectori de poziţie r satisfac una din relaţiile (1), (2), (3) sau (4), unde funcţiile F, f, x, y, z, r satisfac următoarele condiţii numite de regularitate:
1. sunt funcţii reale, uniforme şi continue, 2. admit derivate (F, f - derivate parţiale, x, y, z - derivate ordinare) de ordinul întâi,
continue, nu toate nule, 3. funcţiile x, y, z, r stabilesc o corespondenţă biunivocă şi bicontinuă între punctele M ∈
(Σ) şi perechile ordonate de parametri reali (u, v), ( )) v,(v )u ,(u ) v,( 2121 ×∈u ,
4. cel puţin unul dintre determinanţii funcţionali (jacobienii): v)D(u,
)y ,(xD , v)D(u,
)z ,(yD ,
v)D(u,
) x,(zD , este nenul.
Definiţia 3. Se spune că o porţiune regulată de suprafaţă (Σ) este o porţiune de suprafaţă regulată de ordinul n, dacă funcţiile F, f, x, y, z, r din relaţiile (1), (2), (3), (4) admit derivate parţiale continue până la şi inclusiv ordinul n > 1, astfel încât nu toate derivatele de acelaşi ordin să se anuleze. Definiţia 4. Fie (Σ) o porţiune simplă de suprafaţă. Un punct M ∈ (Σ) se numeşte punct ordinar, dacă în punctul M sunt satisfăcute toate condiţiile de regularitate. În caz contrar se numeşte punct singular. Observaţia 2. Punctele singulare sunt de două categorii: proprii şi improprii.

117
Un punct singular M ∈ (Σ) este propriu, dacă M este singular în orice reprezentare analitică a lui (Σ).
Un punct singular M ∈ (Σ) este impropriu, dacă există cel puţin o reprezentare analitică a lui (Σ), în care M să nu fie singular. Definiţia 5. Fie (Σ i)i∈ I o familie de porţiuni de suprafaţă regulate. Se numeşte suprafaţă regulată, reuniunea tuturor porţiunilor de suprafaţă regulate din familia (Σ i)i∈ I, adică: )()( i
IiΣ=Σ
∈ ,unde frontierele porţiunilor (Σ i) pot fi eventual curbe singulare.
Utilizând cunoştinţele referitoare la cuadrice, exemplifică cel puţin două reprezentări analitice ale suprafeţelor
Să ne reamintim… OO ssuupprraaffaaţţăă ppooaattee ffii rreepprreezzeennttaattăă aannaalliittiicc pprriinn: reprezentarea analitică implicită sau ecuaţia implicită; reprezentarea analitică explicită sau ecuaţia explicită; reprezentarea analitică parametrică sau ecuaţiile parametrice; reprezentarea vectorială sau ecuaţia vectorială.
IIIIII..33..44.. CCuurrbbee ttrraassaattee ppee oo ssuupprraaffaaţţăă.. CCuurrbbee ccoooorrddoonnaattee
Definiţia 6. Fie suprafaţa regulată (Σ), dată în reprezentarea parametrică (3).Mulţimea punctelor M ∈ (Σ) ale căror coordonate x, y, z verifică ecuaţiile:
(Γ) : ( )( )( )
∈===
),,(,)(),(,)(),(,)(),(
21 ttttvtuzztvtuyytvtuxx
formează o curbă (Γ) (fig. 1), numită curbă trasată pe suprafaţa (Σ). Ecuaţiile date în definiţia 6 se numesc ecuaţiile parametrice ale curbei (Γ) trasate pe suprafaţa (Σ). Observaţia 3. Dacă (Σ) este o suprafaţă dată în reprezentarea vectorială (4) şi curba (Γ) trasată pe suprafaţa (Σ), atunci reprezentarea vectorială este: ( ) ),(,)(),(:)( 21 ttttvturr ∈=Γ .
Definiţia 7. Fie (Σ) o suprafaţă regulată, dată în reprezentarea parametrică (3).Se numeşte curbă coordonată de tipul (u), o curbă (Γu) ⊂ (Σ), dată prin următoarea reprezentare parametrică:
(Γu) :
===
),,(),,(),,(
0
0
0
vuzzvuyyvuxx
unde )u ,(u 21∈u , iar v0 constant (fig. 2).
Se numeşte curbă coordonată de tipul (v), o curbă (Γv) ⊂ (Σ), dată prin următoarea
reprezentare parametrică: (Γv) :
===
),,(),,(),,(
0
0
0
vuzzvuyyvuxx
unde ) v,(v 21∈v iar u0 este constant (fig. 2).
(Γ) (Σ)
y
z
x O
Fig.1.
O y
x
z
(Σ)
(Γu)
(Γv)
Fig. 2.
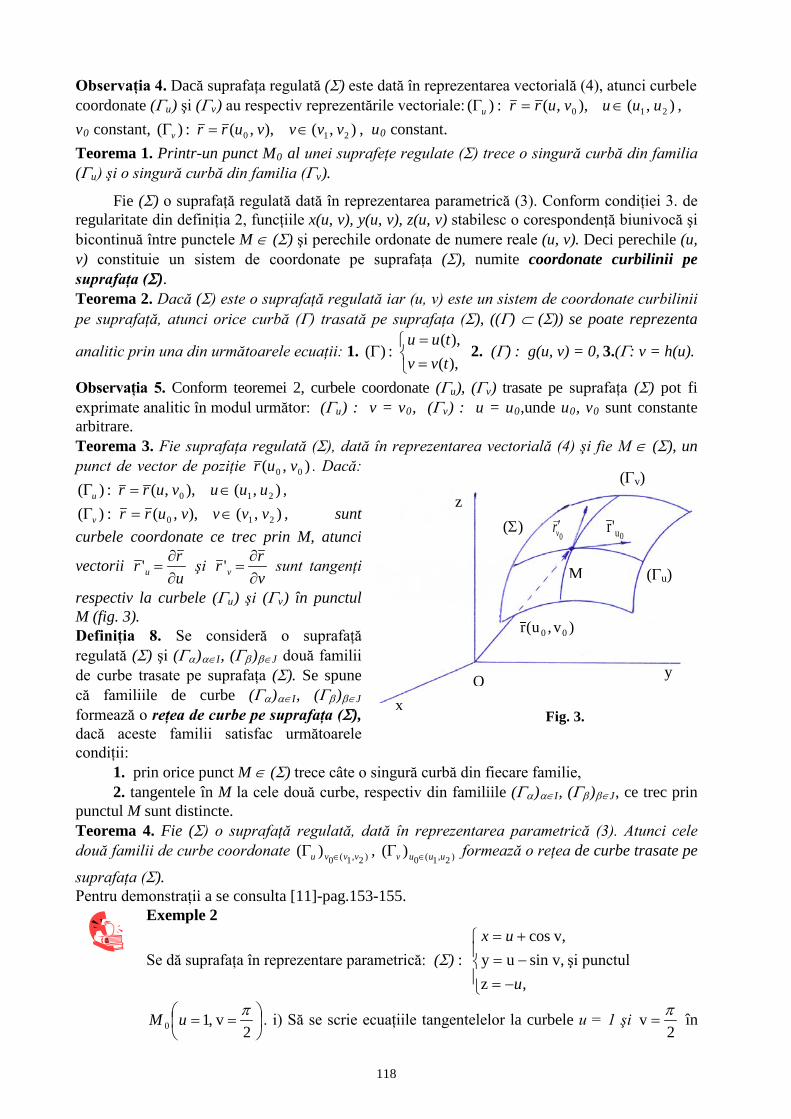
118
Observaţia 4. Dacă suprafaţa regulată (Σ) este dată în reprezentarea vectorială (4), atunci curbele coordonate (Γu) şi (Γv) au respectiv reprezentările vectoriale: ),(),,(:)( 210 uuuvurru ∈=Γ , v0 constant, ),(),,(:)( 210 vvvvurrv ∈=Γ , u0 constant. Teorema 1. Printr-un punct M0 al unei suprafeţe regulate (Σ) trece o singură curbă din familia (Γu) şi o singură curbă din familia (Γv).
Fie (Σ) o suprafaţă regulată dată în reprezentarea parametrică (3). Conform condiţiei 3. de regularitate din definiţia 2, funcţiile x(u, v), y(u, v), z(u, v) stabilesc o corespondenţă biunivocă şi bicontinuă între punctele M ∈ (Σ) şi perechile ordonate de numere reale (u, v). Deci perechile (u, v) constituie un sistem de coordonate pe suprafaţa (Σ), numite coordonate curbilinii pe suprafaţa (Σ). Teorema 2. Dacă (Σ) este o suprafaţă regulată iar (u, v) este un sistem de coordonate curbilinii pe suprafaţă, atunci orice curbă (Γ) trasată pe suprafaţa (Σ), ((Γ) ⊂ (Σ)) se poate reprezenta
analitic prin una din următoarele ecuaţii: 1.
==
Γ),(),(
:)(tvvtuu
2. (Γ) : g(u, v) = 0, 3.(Γ: v = h(u).
Observaţia 5. Conform teoremei 2, curbele coordonate (Γu), (Γv) trasate pe suprafaţa (Σ) pot fi exprimate analitic în modul următor: (Γu) : v = v0, (Γv) : u = u0,unde u0, v0 sunt constante arbitrare. Teorema 3. Fie suprafaţa regulată (Σ), dată în reprezentarea vectorială (4) şi fie M ∈ (Σ), un punct de vector de poziţie ),( 00 vur . Dacă:
),(),,(:)( 210 uuuvurru ∈=Γ , ),(),,(:)( 210 vvvvurrv ∈=Γ , sunt
curbele coordonate ce trec prin M, atunci
vectorii urr u ∂
∂=' şi
vrr v ∂
∂=' sunt tangenţi
respectiv la curbele (Γu) şi (Γv) în punctul M (fig. 3). Definiţia 8. Se consideră o suprafaţă regulată (Σ) şi (Γα)α∈I, (Γβ)β∈J două familii de curbe trasate pe suprafaţa (Σ). Se spune că familiile de curbe (Γα)α∈I, (Γβ)β∈J formează o reţea de curbe pe suprafaţa (Σ), dacă aceste familii satisfac următoarele condiţii:
1. prin orice punct M ∈ (Σ) trece câte o singură curbă din fiecare familie, 2. tangentele în M la cele două curbe, respectiv din familiile (Γα)α∈I, (Γβ)β∈J, ce trec prin
punctul M sunt distincte. Teorema 4. Fie (Σ) o suprafaţă regulată, dată în reprezentarea parametrică (3). Atunci cele două familii de curbe coordonate )2,1(0
)( vvvu ∈Γ , )2,1(0)( uuuv ∈Γ formează o reţea de curbe trasate pe
suprafaţa (Σ). Pentru demonstraţii a se consulta [11]-pag.153-155. Exemple 2
Se dă suprafaţa în reprezentare parametrică: (Σ) :
−=−=+=
,z v,sinuy v,cos
u
uxşi punctul
==
2 v,10
πuM . i) Să se scrie ecuaţiile tangentelelor la curbele u = 1 şi 2
v π= în
O y
x
z
(Σ)
(Γu)
(Γv)
0vr ′
M
0u'r
)v,u(r 00
Fig. 3.

119
punctul M0 şi ecuaţiile planelor normale în acest punct. ii) Să se arate că tangentele în punctul M0 la curbele u = 1 şi u = sin v coincid. iii) Să se scrie ecuaţia implicită a suprafeţei şi să se recunoască natura ei. iv) Să se scrie ecuaţiile carteziene ale curbelor v = constant.
Soluţie: i) Coordonatele punctului M0 sunt: (1, 0, -1), iar curba u = 1 are ecuaţiile
parametrice:(Γ1) :
−=−=+=
.1z v,sin1y v,cos1x
Tangenta în M0 la această curbă are ecuaţiile:
(T) :
=+=
,01Z,0Y
iar planul normal: (πN) : X – 1 = 0.Curba 2
v π= are ecuaţiile
parametrice: (Γ2) :
−=−=
=
,z,1uy
,
u
ux adică este o dreaptă.
ii) Curba (Γ) : u = sin v are ecuaţiile parametrice: (Γ) :
−==
+=
v.sinz,0y
v,cos vsinx
Vectorul director al tangentei în M0 la curba (Γ) este )0 0, ,1(−v . Tangenta în M0 la curba (Γ1) are vectorul tot director )0 0, ,1(−v , deci cele două tangente coincid.
iii) Pentru a obţine ecuaţia implicită a suprafeţei se elimină parametrii u şi v
între ecuaţiile suprafeţei:
+=−+=
−=
. vsin, vcos
,
zyzx
zuSe foloseşte identitatea fundamentală a
trigonometriei, se obţine:(Σ) : (x + z)2 + (y + z)2 = 1, deci suprafaţa este un cilindru.
iv) Pentru v = k se obţine (Γu):
−=−=+=
.zk, sinuyk, cos
u
uxde unde ecuaţiile carteziene
sunt: y + z = - sink, x + z = cosk.
Se dă suprafaţa de ecuaţii parametrice: (Σ) :
=−=+=
.,,
uvzvuyvux
Determină:
i) coordonatele punctului: M0 (u = 8, v = 1); ii) ecuaţiile carteziene ale curbei u = 1; iii) ecuaţia carteziană a suprafeţei.
R: i) M0 (9, 7, 8); ii) x + y – 2 = 0, x – z – 1 = 0; iii) 0422 =−− zyx .
Să ne reamintim… Dacă: ),(),,(:)( 210 uuuvurru ∈=Γ , ),(),,(:)( 210 vvvvurrv ∈=Γ , sunt
curbele coordonate ce trec prin M, atunci vectorii urr u ∂
∂=' şi
vrr v ∂
∂=' sunt tangenţi
respectiv la curbele (Γu) şi (Γv) în punctul M .
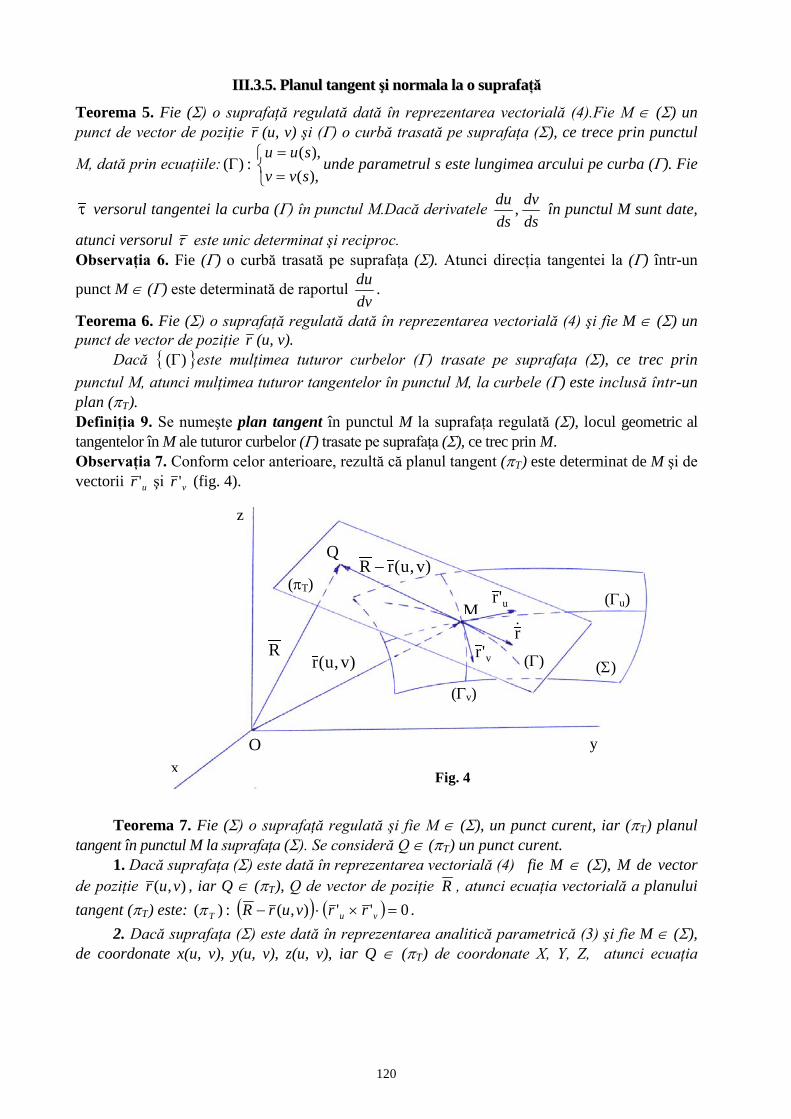
120
IIIIII..33..55.. PPllaannuull ttaannggeenntt şşii nnoorrmmaallaa llaa oo ssuupprraaffaaţţăă
Teorema 5. Fie (Σ) o suprafaţă regulată dată în reprezentarea vectorială (4).Fie M ∈ (Σ) un punct de vector de poziţie r (u, v) şi (Γ) o curbă trasată pe suprafaţa (Σ), ce trece prin punctul
M, dată prin ecuaţiile:
==
Γ),(),(
:)(svvsuu
unde parametrul s este lungimea arcului pe curba (Γ). Fie
τ versorul tangentei la curba (Γ) în punctul M.Dacă derivatele dsdv
dsdu , în punctul M sunt date,
atunci versorul τ este unic determinat şi reciproc. Observaţia 6. Fie (Γ) o curbă trasată pe suprafaţa (Σ). Atunci direcţia tangentei la (Γ) într-un
punct M ∈ (Γ) este determinată de raportul dvdu .
Teorema 6. Fie (Σ) o suprafaţă regulată dată în reprezentarea vectorială (4) şi fie M ∈ (Σ) un punct de vector de poziţie r (u, v).
Dacă { })(Γ este mulţimea tuturor curbelor (Γ) trasate pe suprafaţa (Σ), ce trec prin punctul M, atunci mulţimea tuturor tangentelor în punctul M, la curbele (Γ) este inclusă într-un plan (πT). Definiţia 9. Se numeşte plan tangent în punctul M la suprafaţa regulată (Σ), locul geometric al tangentelor în M ale tuturor curbelor (Γ) trasate pe suprafaţa (Σ), ce trec prin M. Observaţia 7. Conform celor anterioare, rezultă că planul tangent (πT) este determinat de M şi de vectorii ur ' şi vr ' (fig. 4).
Teorema 7. Fie (Σ) o suprafaţă regulată şi fie M ∈ (Σ), un punct curent, iar (πT) planul tangent în punctul M la suprafaţa (Σ). Se consideră Q ∈ (πT) un punct curent.
1. Dacă suprafaţa (Σ) este dată în reprezentarea vectorială (4) fie M ∈ (Σ), M de vector de poziţie ),( vur , iar Q ∈ (πT), Q de vector de poziţie R , atunci ecuaţia vectorială a planului tangent (πT) este: ( ) ( ) 0''),(:)( =×⋅− vuT rrvurRπ .
2. Dacă suprafaţa (Σ) este dată în reprezentarea analitică parametrică (3) şi fie M ∈ (Σ), de coordonate x(u, v), y(u, v), z(u, v), iar Q ∈ (πT) de coordonate X, Y, Z, atunci ecuaţia
v'r
u'r
r
M
(Γv)
)v,u(r
(Γu)
(Σ) (Γ)
O
Q
R
)v,u(rR −
Fig. 4
z
y
x
(πT)

121
planului tangent (πT) determinat de punctul M şi de direcţiile necoliniare ur ' , vr ' , sub formă de
determinant de ordinul al 3-lea este: 0''''''
),(),(),(:)( =
−−−
vvv
uuuT
zyxzyx
vuzZvuyYvuxXπ .
3. Dacă suprafaţa (Σ) este dată în reprezentarea analitică implicită (1) şi fie M ∈ (Σ), de coordonate x, y, z, iar Q ∈ (πT) de coordonate X, Y, Z, atunci ecuaţia planului tangent (πT) este:
(πT) : F’x(X – x) + F’y(Y – y) + F’z(Z – z) = 0, unde: xFF x ∂
∂=' ,
yFF y ∂
∂=' ,
zFF z ∂
∂=' .
Pentru demonstraţii a se consulta [11]-pag.155 şi 160. Definiţia 10. Se spune că două suprafeţe (Σ), (Σ1) sunt tangente într-un punct comun al lor M, dacă ele admit acelaşi plan tangent în punctul M.
Fie o suprafaţă regulată (Σ) dată în reprezentarea vectorială (4), iar M ∈ (Σ) un punct de vector de poziţie r (u, v). Se consideră vu rr ',' vectorii tangenţi la curbele coordonate (Γu), (Γv) ce trec prin punctul M. Definiţia 11. Vectorul normal, N , în punctul M la suprafaţa (Σ) este definit de relaţia: vu rrN '' ×= , astfel încât vectorii, N , vu rr ',' să formeze un triedru drept. Observaţia 8. Rezultă din definiţia 11 că vectorul N este perpendicular pe planul tangent (πT) în punctul M la suprafaţa (Σ). Teorema 8. Se consideră suprafaţa regulată (Σ) dată în reprezentarea vectorială (4) şi fie M ∈ (Σ) un punct de vector de poziţie k ),(z j ),(y i ),( vuvuvuxr ++= . Dacă n este versorul vectorului normal N la suprafaţa (Σ) în M, atunci:
( )vu
vv
uu
vv
uu
vv
uu
rr
yxyx
xzxz
zyzy
n ''
''''
''''
''''
1222
×
++
= .
Pentru demonstraţie a se consulta [29]-pag.171. Definiţia 12. Se numeşte normală în punctul ordinar M la suprafaţa (Σ), dreapta (∆N) ce trece prin M şi este perpendiculară pe planul tangent în M la (Σ). Observaţia 9. În fiecare punct ordinar al unei suprafeţe (Σ), se poate ataşa un triplet de vectori liniar independenţi: vu rr ',' şi n , care, în contrast cu reperul lui Frenet al curbelor în spaţiu nu este ortonormat, deoarece, în general, vu rşir '' nu sunt unitari şi nici ortogonali.
Normala (∆N) se orientează astfel încât sensul pozi-tiv al ei să coincidă cu sensul versorului n (fig. 5). Observaţia 10. O suprafaţă (Σ) se orientează convenţional în felul următor: se consideră pozitivă faţa suprafeţei dinspre partea pozitivă a normalei, cealaltă faţă se consideră negativă. Teorema 9. Se consideră o suprafaţă regulată (Σ), M ∈ (Σ), un punct curent, fie (∆N) normala în punctul M la suprafaţa (Σ), iar Q ∈ (∆N) un punct curent (fig. 5).
1. Dacă suprafaţa (Σ) este dată în reprezentarea vectorială (4 ),fie M ∈ (Σ), de vector de poziţie ),( vur , iar Q ∈ (∆N), de vector de poziţie
n
M )v,u(r
(Σ)
(πT)
O
Q R
N
Fig. 5.
z
y
x
(∆N)

122
R , atunci ecuaţia vectorială a dreptei normale (∆N) este: R∈=−∆ λλ ,),(:)( NvurRN .
2. Dacă suprafaţa (Σ) este dată în reprezentarea analitică parametrică (3),fie M ∈ (Σ), de coordonate x(u, v), y(u, v), z(u, v), iar Q ∈ (∆N) de coordonate X, Y, Z, atunci ecuaţiile canonice
ale dreptei normale (∆N) sunt:
vv
uu
vv
uu
vv
uuN
yxyx
vuzZ
xzxz
vuyY
zyzy
vuxX
''''
),(
''''
),(
''''
),(:)( −=
−=
−∆ .
3. Dacă suprafaţa (Σ) este dată în reprezentarea analitică implicită (1),fie M ∈ (Σ), de coordonate x, y, z, iar Q ∈ (∆N) de coordonate X, Y, Z, atunci, ecuaţiile canonice ale dreptei
normale (∆N) sunt:
zF
zZ
yF
yY
xF
xXN
∂∂−
=
∂∂−
=
∂∂−
∆ :)( .
Pentru demonstraţie a se consulta [29]-pag.172-174. Definiţia 13. Se consideră (Σ1), (Σ2) două suprafeţe regulate şi M, un punct comun acestora. Fie
1N , 2N vectorii normali în M la respectiv suprafeţele (Σ1), (Σ2). Se spune că suprafeţele (Σ1), (Σ2) sunt ortogonale în M dacă: 21 NN ⊥ .
Exemple 3
Se consideră suprafaţa dată în reprezentare parametrică: (Σ) :
==
=−
uv 4,
,
zueyuex
v
v
şi
se cere: i) Ecuaţia planului tangent la suprafaţă în punctul M(u = 2, v = 0). ii) Ecuaţiile normalei în M. iii) Versorul normalei în M. Soluţie: i) Ecuaţia planului tangent în M la (Σ) este:
0''''''
ZYX : )( =
−−−
MMM
MMM
vvv
uuu
MMM
T
zyxzyx
zyxπ , unde:
0 4'
,1'
,1'
==
==
==−
Mu
Mv
u
vu
vz
ey
ex
M
M
MM
şi
.8u 4'
,2 '
,2 '
==
−=−=
==−
Mv
Mv
v
vv
M
M
MM
z
euy
eux
deci: 0822011Z2Y2X
: )( =−
−−
Tπ ,sau: (πT) : 2 x – 2 y – z =
0.
ii) Ecuaţiile normalei sunt: 1
Z22Y
22X : )(
−=
−−
=−N .
iii) Versorul normalei este: ( )kkn −−=++−−
= j 2i 2 31
144j 2i 2 .
Fie (Σ):
===
v,cos,sinsin,sincos
RzvuRyvuRx
[ ] [ ].,0,0,2u ππ ∈∈ v Determină ecuaţia planului tangent
la (Σ) în M(u = v = 4π ) R : (πT) :
42
(X - 2R
) + 42
(Y - 2R
) + 21
(Z - 2
2R)
=0.
123
Să ne reamintim… Dacă suprafaţa (Σ) este dată în reprezentarea analitică parametrică, atunci
ecuaţia planului tangent (πT) este:
0'z'y'x'z'y'x
)v,u(zZ)v,u(yY)v,u(xX:)(
vvv
uuuT =−−−
π .
Dacă suprafaţa (Σ) este dată în reprezentarea analitică implicită, atunci ecuaţia planului tangent (πT) este: (πT) : F’x(X – x) + F’y(Y – y) + F’z(Z – z) = 0. Vectorul normal, N , în punctul M la suprafaţa (Σ) este definit de relaţia: vu rrN '' ×= , astfel încât vectorii, N , vu rr ',' să formeze un triedru drept.
IIIIII..33..66.. PPrriimmaa ffoorrmmăă ffuunnddaammeennttaallăă aa uunneeii ssuupprraaffeeţţee.. AApplliiccaaţţiiii aallee aacceesstteeiiaa
Teorema 10. Se consideră o suprafaţă regulată (Σ), dată în reprezentarea vectorială (4) şi fie (Γ) o curbă trasată pe suprafaţa (Σ), dată de: (Γ) : ( ) ) t,(t t , v(t)u(t), rr 21∈= .Dacă ds este
elementul de arc pe curba (Γ), atunci: 22 dsrd = . Pentru demonstraţie a se consulta [29]-pag.175-176. Definiţia 14. Se consideră o suprafaţă regulată (Σ), (Γ) o curbă arbitrară trasată pe suprafaţă şi ds elementul de arc pe (Γ).Se numeşte prima formă fundamentală a suprafeţei (Σ) expresia ds2. Observaţia 11. Prima formă fundamentală a unei suprafeţe se notează cu Φ1 şi se mai numeşte metrica suprafeţei (Σ), sau pătratul elementului liniar al suprafeţei, sau forma lui Gauss, deoarece este introdusă în geometrie de matematicianul K.F. Gauss. Deci: Φ1 = ds2. Teorema 11. Se consideră o suprafaţă regulată (Σ) şi (Γ) o curbă trasată pe suprafaţa (Σ).Dacă suprafaţa (Σ) este dată în reprezentarea vectorială (4), atunci prima formă fundamentală are expresia: Φ1 = E du2 + 2 F du dv + G dv2, unde, pe baza notaţiilor lui Gauss:
2'urE = , vu rrF '' ⋅= , 2'vrG = , unde E, F, G sunt funcţii luate în punctul ( ))(),( tvtu . Pentru demonstraţie a se consulta [29]-pag.177-178. Teorema 12. Se consideră (Σ) o suprafaţă regulată, dată în reprezentarea vectorială (4) şi fie metrica sa: Φ1 = E du2 + 2 F du dv + G dv2.Dacă N este vectorul normal în punctul M ∈ (Σ) la suprafaţa (Σ), atunci: 2FEGN −= . Pentru demonstraţie a se consulta [29]-pag.179.
Observaţia 12. Dacă suprafaţa regulată (Σ) este dată în reprezentarea analitică parametrică (3),
atunci, conform teoremei 8 are loc: 222
''''
''''
''''
vv
uu
vv
uu
vv
uu
yxyx
xzxz
zyzy
N ++= ,
aşadar: EG – F2 = 2
2
''''
vv
uu
zyzy
N = + 2
''''
vv
uu
xzxz
+ 2
''''
vv
uu
yxyx
.
Teorema 13. Se consideră o suprafaţă regulată (Σ), dată în reprezentarea vectorială (4). Dacă (Γ) este o curbă trasată pe suprafaţa (Γ) : ( ) ) t,(t t , v(t)u(t), rr 21∈= ,atunci elementul de
arc pe curba (Γ) este determinat de relaţia: dtdtdvG
dtduEds
dtdv
dtdu F 2
22
+⋅+
= .
Pentru demonstraţie a se consulta [29]-pag.180.

124
Teorema 14. Fie (Γ) o curbă trasată pe suprafaţa regulată: (Γ) : ( ) ) t,(t t , v(t)u(t), rr 21∈= . Dacă M1, M2 ∈ (Γ), M1(t = t1), M2(t = t2), atunci lungimea arcului curbei (Γ) cuprins între
punctele M1 şi M2 este dată de relaţia: 2M1ML = ∫
+
⋅+
2
1
22
dtdv
dtdu F 2
t
tdt
dtdvG
dtduE .
Pentru demonstraţie a se consulta [29]-pag.181-182.
Definiţia 15. Se consideră (Σ) o suprafaţă regulată şi (Γ1), (Γ2), două curbe trasate pe suprafaţa (Σ). Dacă M ∈ (Γ1) ∩ (Γ2) şi dacă 1τ , 2τ sunt respectiv versorii tangentelor în punctul M la cele două curbe, atunci prin unghiul curbelor (Γ1) şi (Γ2) se înţelege unghiul tangentelor la cele două curbe în M, adică unghiul α al versorilor 1τ şi 2τ . Teorema 15. Se consideră suprafaţa regulată (Σ), dată în reprezentarea vectorială (4) şi fie (Γ1), (Γ2) două curbe trasate pe suprafaţa (Σ). Dacă se notează prin )ds dv, du, ,( rd , respectiv
)s v, u, ,( δδδδr diferenţialele de-a lungul curbei (Γ1) respectiv (Γ2), atunci unghiul α dintre curbele (Γ1), (Γ2) în punctul M ∈ (Γ1) ∩ (Γ2) este dat de formula:
2222 vG u F 2 u E dvG dvdu F 2 du Ev dvG u) dv vF(du u du E cos
δδδδ
δδδδα++⋅++
+++=
v ,
unde E, F, G sunt coeficienţii primei forme fundamentale a suprafeţei (Σ) calculaţi în punctul M. Pentru demonstraţie a se consulta [29]-pag.182-183.
Observaţia 13. În cazul particular când (Γ1) ≡ (Γu) şi (Γ2) ≡ (Γv), adică (Γ1), (Γ2) sunt respectiv curbele coordonate ce trec prin punctul ordinar M, se obţin relaţiile: dv = 0, δu = 0. Deci,unghiul
α dintre două curbe coordonate ce trec prin punctul M este: G E
F cos =α .
Definiţia 16. Se consideră (Σ) o suprafaţă regulată, (Γ1), (Γ2), două curbe trasate pe suprafaţa (Σ) şi fie M ∈ (Γ1) ∩ (Γ2), iar 1τ , 2τ versorii tangentelor în punctul M respectiv la curbele (Γ1), (Γ2)
şi fie ( ). , 21 ττα = Curbele (Γ1), (Γ2) se spune că sunt ortogonale în M, dacă 2πα = .
Definiţia 17. Fie (Σ) o suprafaţă regulată, pe care se consideră o reţea de curbe [(Γα)α, (Γβ)β].Se spune că reţeaua [(Γα)α, (Γβ)β] este ortogonală pe (Σ) dacă oricare ar fi punctul M ∈ (Σ) cele două curbe (Γα) ∈ (Γα)α, (Γβ) ∈ (Γβ)β ce trec prin punctul M sunt ortogonale.
Teorema 16. Se consideră (Σ) o suprafaţă regulată, (Γ1), (Γ2), două curbe trasate pe suprafaţa (Σ) şi fie M ∈ (Γ1) ∩ (Γ2).Condiţia necesară şi suficientă ca (Γ1), (Γ2) să fie ortogonale în M este ca: E du δu + F(du δv + δu dv) + G dv δv = 0. Pentru demonstraţie a se consulta [29]-pag.182-183.
Teorema 17. Se consideră o suprafaţă regulată (Σ) şi fie [(Γu)u, (Γv)v] reţeaua curbelor coordonate trasate pe (Σ).Condiţia necesară şi suficientă ca reţeaua [(Γu)u, (Γv)v] să fie ortogonală pe (Σ) este ca F = 0 în orice punct M ∈ (Σ). Pentru demonstraţie a se consulta [29]-pag.184.
Definiţia 18. Se consideră o porţiune de suprafaţă regulată (Σ), dată în reprezentarea vectorială (4).Se împarte porţiunea de suprafaţă (Σ) în paralelograme curbilinii cu ajutorul familiilor de curbe coordonate (Γu)u, (Γv)v (fig. 6). Fie MM1M2M3 paralelogramul curbiliniu determinat de curbele coordonate ( )
iuΓ , ( )ii uu ∆+Γ , ( )
jvΓ , ( )jj vv ∆+Γ date de: ( )
iuΓ : v = vj , ( )ii uu ∆+Γ : v = vj + ∆vj ,
( )jvΓ : u = ui , ( )
jj vv ∆+Γ : u = ui + ∆ui .
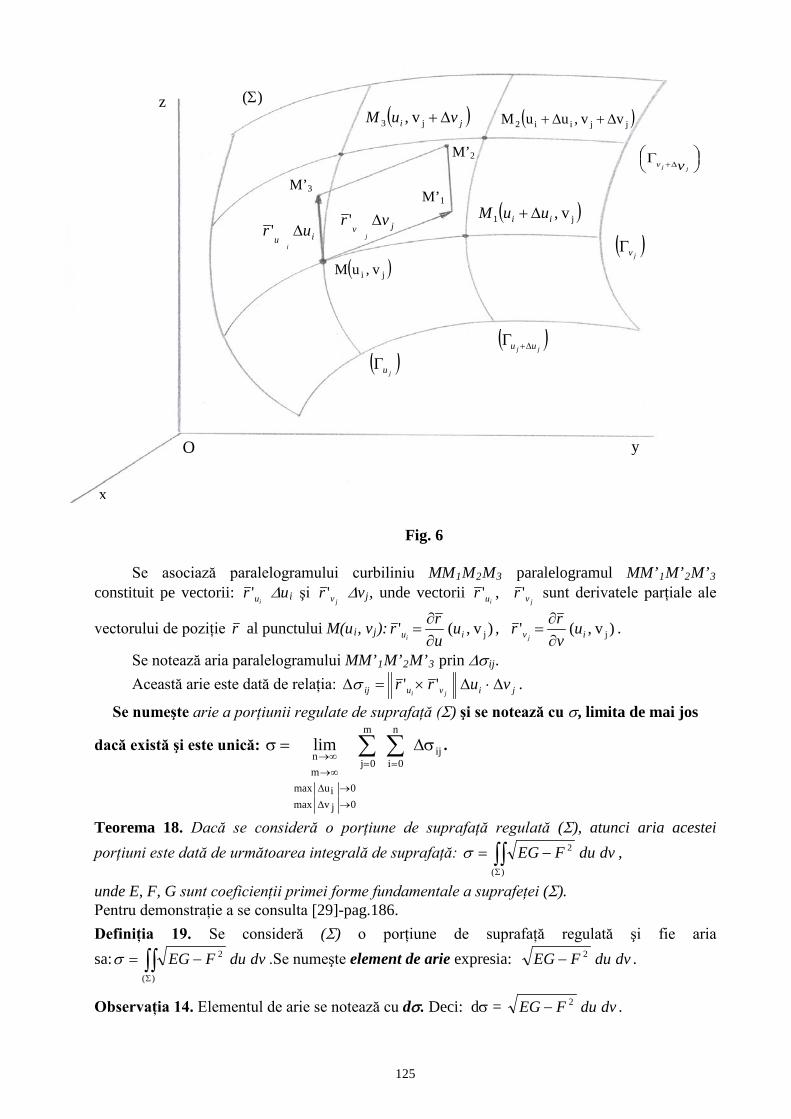
125
Fig.6.
Fig. 6 Se asociază paralelogramului curbiliniu MM1M2M3 paralelogramul MM’1M’2M’3
constituit pe vectorii: iur ' ∆ui şi
jvr ' ∆vj, unde vectorii iur ' ,
jvr ' sunt derivatele parţiale ale
vectorului de poziţie r al punctului M(ui, vj): ) v,(' jiu uurr
i ∂∂
= , ) v,(' jiv uvrr
j ∂∂
= .
Se notează aria paralelogramului MM’1M’2M’3 prin ∆σij. Această arie este dată de relaţia: jivuij vurr
ji∆⋅∆×=∆ ''σ .
Se numeşte arie a porţiunii regulate de suprafaţă (Σ) şi se notează cu σ, limita de mai jos
dacă există şi este unică: ij
n
0i
m
0j
0jvmax0iumax
mnlim σ∆=σ ∑∑
==
→∆
→∆∞→∞→
.
Teorema 18. Dacă se consideră o porţiune de suprafaţă regulată (Σ), atunci aria acestei porţiuni este dată de următoarea integrală de suprafaţă: ∫∫
Σ
−=)(
2 dvduFEGσ ,
unde E, F, G sunt coeficienţii primei forme fundamentale a suprafeţei (Σ). Pentru demonstraţie a se consulta [29]-pag.186. Definiţia 19. Se consideră (Σ) o porţiune de suprafaţă regulată şi fie aria sa: ∫∫
Σ
−=)(
2 dvduFEGσ .Se numeşte element de arie expresia: dvduFEG 2− .
Observaţia 14. Elementul de arie se notează cu dσ. Deci: dσ = dvduFEG 2− .
M’3
z (Σ)
y
x
O
( )jj uu ∆+Γ
( )juΓ
Γ ∆+ v jjv
( )jvΓ
jvvr
j
∆' iu
uri
∆'
( )ji v,uM
( )j1 v,ii uuM ∆+ M’1
( )jjii2 v v,uuM ∆+∆+ ( )ji vuM ∆+j3 v,
M’2

126
Observaţia 15. Dacă porţiunea de suprafaţă (Σ) este dată în reprezentarea analitică parametrică
(3), atunci: dvduyxyx
xzxz
zyzy
dvv
uu
vv
uu
vv
uu222
''''
''''
''''
++=σ .
Propoziţia 1. În orice punct ordinar al unei suprafeţe, prima formă fundamentală este pozitiv definită, adică: E > 0, G > 0, EG – F2 > 0. Pentru demonstraţie a se consulta [29]-pag.188. Exemple 4
Se dă suprafaţa de ecuaţii parametrice: (Σ) :
+===
,z v,sinu y v,cos
vu
ux şi se cere:
i) Prima formă fundamentală a suprafeţei. ii) Unghiul curbelor coordonate. iii) Lungimea arcului curbei u = 1 cuprins între curbele v = 1 şi v = 2. iv) Elementul de arie al suprafeţei. Soluţie: i) Dacă se calculează coeficienţii E, F, G ai primei forme fundamentale
se obţine E = 2, F = 1 şi G = u2 + 1. Deci prima formă fundamentală a suprafeţei (Σ) este: Φ1 = 2 du2 + 2 du dv + (u2 + 1)dv2.
ii) Unghiul dintre curbele coordonate este dat de EGF cos =α , astfel că pentru suprafaţa
dată se obţine: [ ] 21
2 1)(u 2 cos −+=α .
iii) Elementul de arc pe curba u = 1 cu du = 0 este dv, 2=ds iar lungimea arcului
este: 2dv 22
1
== ∫L .
iv) Elementul de arie al suprafeţei este: dvdu 1u 2dvdu 22 +=−= FEGdσ .
Calculează de pe suprafaţa: (Σ) :
+=
=
+=
,z v,-uy v,
2
2
vu
ux unghiul format de curbele: u =1 şi
v = -1. R: 4πα = .
Să ne reamintim… Prima formă fundamentală a suprafeţei (Σ):Φ1 = E du2 + 2 F du dv + G dv2 , unde:
2'urE = , vu rrF '' ⋅= , 2'vrG = . Aplicaţiile ei sunt: 1.lungimea arcului curbei (Γ) cuprins între punctele M1 şi M2 :
2M1ML = ∫
+
⋅+
2
1
22
dtdv
dtdu F 2
t
tdt
dtdvG
dtduE , 2.unghiul curbelor (Γ1) şi
(Γ2) :2222 vG u F 2 u E dvG dvdu F 2 du E
v dvG u) dv vF(du u du E cosδδδδ
δδδδα++⋅++
+++=
v;
3. elementul de arie: dσ = dvduFEG 2− .

127
IIIIII..33..77 Rezumat În cadrul acestei unităţi de învăţare se introduc şi se exemplifică diferitele reprezentări analitice ale suprafeţelor, se definesc şi se caracterizează noţiunile de: curbe trasate pe o suprafaţă, plan tangent şi normală la o suprafaţă. Se prezintă şi se exemplifică în continuare prima formă fundamentală a unei suprafeţe şi aplicaţiile acesteia: elementul de arc, lungimea unui arc, măsurarea unghiurilor şi aria unei porţiuni de suprafaţă.
IIIIII..33..88 Test de autoevaluare a cunoştinţelor 1. Caracterizează noţiunile de: plan tangent şi normală la o suprafaţă. 2. Defineşte şi caracterizează prima formă fundamentală a unei suprafeţe. 3. Defineşte şi caracterizează aplicaţiile primei forme fundamentale a unei suprafeţe.
4.Se dă suprafaţa în reprezentare parametrică: (Σ) :
=−=
+=
,z v,uy v,
2
2
uv
uxşi punctul
( )1 v,10 ==uM . i) Scrie ecuaţiile carteziene ale curbelor v = constant. ii) Scrie ecuaţia planului normal la curba u = 1 în punctul M0 .
5. Determină de pe suprafaţa: (Σ) :
+=
==
,)sin(z v,y
,
vu
ux i) ecuaţia planului tangent la
suprafaţă şi ecuaţiile normalei la suprafaţă în punctul u=0, v=0. ii) unghiul format de curbele: u + v =0 şi u - v = 0.
IIIIII..33..99.. RRăăssppuunnssuurrii şşii ccoommeennttaarriiii llaa tteessttuull ddee aauuttooeevvaalluuaarree 11.. RReevveezzii ppaarraaggrraaffuull IIIIII..33..55..-- tteeoorreemmaa 77 şşii tteeoorreemmaa 99.. 22.. RReevveezzii ppaarraaggrraaffuull IIIIII..33..66..--ddeeffiinniiţţiiaa 1144,, tteeoorreemmaa1111.. 33.. RReevveezzii ppaarraaggrraaffuull IIIIII..33..66..--ddeeffiinniiţţiiiillee::1155,,1188,,1199 şşii tteeoorreemmeellee::1144,,1155,,1188,, oobbsseerrvvaaţţiiaa
1133,, ddeeffiinniiţţiiaa 1188,, tteeoorreemmaa 1188,, oobbsseerrvvaaţţiiiillee::1144,, 1155..
4. i)(Γu): x – y = 2k, x = 22
2
kkz
+ ; ii) ( )1,0,20M ; (Γ1):
=−=+=
,z v,1y v,1
v
x
( ) .03: =−+− ZYXNπ
5. i) (πT) : X + Y - Z = 0; (∆N) :X = Y = - Z; ii) 2πα = .

128
Temă de control 3 – Geometrie diferenţială 1. Scrie ecuaţiile tangentelor şi normalelor la curba plană: (Γ) : y = cos x, în
punctele A şi B de abscise 0, respectivπ . 2. Scrie ecuaţia cercului osculator al curbei: (Γ) : y = cos x , în punctul A de
abscisă π . 3. Studiază punctul singular al folium-ului lui Descartes: (Γ) : x3 + y3 – 3 axy = 0
şi scrie ecuaţiile tangentelor în acest punct. .
4. Se consideră curba în spaţiu: (Γ) :
=
=
=−
tz 2
,e y ,e x t
t
şi punctul M (t = 0) pe curbă.
Găseşte:i) versorul tangentei în M la curbă; ii) ecuaţiile tangentei în M la curbă; iii) curbura curbei şi versorul normalei principale în M la (Γ); iv) ecuaţia planului osculator în M la (Γ). 5. Arată că următoarea curbă în spaţiu:(Γ) : ktajttittr +−= sincos , este
o elice . 6. Calculează prima formă fundamentală a hiperboloidului de rotaţie cu două
pânze: (Σ) :
===
. zsin v,u sh a y
, cos s
uchb
vuhax
După rezolvare, tema de control trebuie transmisă tutorelui, pe foi scrise de mână,
îndosariate.
Sugestii pentru acordarea punctajului • Oficiu: 10 puncte ; • Subiectul 1: 10 puncte ; • Subiectul 2: 15 puncte ; • Subiectul 3: 20 puncte; • Subiectul 4 :- i) 5 puncte ; ii) 5 puncte ; iii) 5 puncte ; iv) 5 puncte; • Subiectul 5: 15 puncte ; • Subiectul 6 : calculul lui Φ1 - 10 puncte.
129
Bibliografie.
1. Atanasiu Gh.: Curs de geometrie diferenţială, Reprografia Univ. din Braşov, 1979. 2. Atanasiu Gh. şi colectiv: Culegere de probleme de algebră liniară, geometrie analitică,
diferenţială şi ecuaţii diferenţiale, Reprografia Univ. din Braşov, 1984, 1993. 3. Atanasiu Gh., Lazăr Gh., Purcaru M.: Curs de algebră liniară şi geometrie analitică.
Reprografia Univ.„Transilvania” din Braşov, 2000. 4. Atanasiu Gh., Munteanu Gh.: Curs de algebră liniară, geometrie analitică, geometrie
diferenţială şi ecuaţii diferenţiale, (Partea I). Reprografia Univ. „Transilvania” din Braşov, 1992. 5. Atanasiu Gh., Munteanu Gh., Păun M.: Curs de algebră liniară, geometrie analitică,
geometrie diferenţială şi ecuaţii diferenţiale, (Partea a II-a), Reprografia Univ. „Transilvania” din Braşov, 1993.
6. Atanasiu Gh., Munteanu Gh., Postolache M.: Algebră liniară. Geometrie analitică şi diferenţială. Ecuaţii diferenţiale - Culegere de probleme. Ed. All, Bucureşti, 1994, 1998.
7. Atanasiu Gh., Stoica E.: Algebră liniară. Geometrie analitică. Ed. Fair Partners, Bucureşti, 2003.
8. Atanasiu Gh., Tatomir E., Purcaru M., Târnoveanu M., Manea A.L.: Geometrie diferenţială şi analiză matematică – culegere de probleme, Reprografia Univ. „Transilvania” din Braşov, 2000.
9. Atanasiu Gh., Târnoveanu M., Purcaru M., Manea A.: Algebră liniară şi geometrie analitică. Reprografia Univ.„Transilvania” din Braşov, 2002.
10. Atanasiu Gh., Târnoveanu M., Purcaru M.:Noţiuni teoretice şi probleme de algebră liniară, geometrie analitică şi geometrie diferenţială. Ed. Univ. „Transilvania” din Braşov, 2007.
11. Atanasiu Gh., Stoica E., Brânzei N.: Curbe şi suprafeţe, Ed. Matrix Rom, Bucureşti, 2005. 12. Bălan V. Algebră liniară. Geometrie analitică. Ed. Fair Partners, Bucureşti, 1999. 13. Cruceanu V.: Elemente de algebră liniară şi geometrie. E.D.P., Bucureşti, 1973. 14. Dobrescu A.: Curs de geometrie diferenţială, E.D.P., Bucureşti, 1961, 1963. 15. Gheorghiev Gh., Miron R., Papuc D.: Geometrie analitică şi diferenţială, Vol. I, II, E.D.P.,
Bucureşti, 1968-1969. 16. Gheorghiu Gh.Th.: Geometrie diferenţială, E.D.P., Bucureşti, 1964. 17. Gheorghiu Gh.Th.: Algebră liniară, geometrie analitică şi diferenţială şi programare. E.D.P.,
Bucureşti, 1977. 18. Grecu E.: Geometrie diferenţială, Ed. Matrix Rom, Bucureşti, 1997. 19. Ianuş S.: Curs de geometrie diferenţială, Litografia Universităţii Bucureşti, 1981. 20. Ionescu-Bujor C., Sacter O.: Exerciţii şi probleme de geometrie analitică şi diferenţială.
Vol. I, II, E.D.P., Bucureşti, 1969. 21. Munteanu, Gh., Manea, A.:Geometrie analitică, Ed. Univ. „Transilvania” din Braşov,2007. 22. Murgulescu Elena, Flexi S., Kreindler O., Sacter O., Tîrnoveanu M.: Curs de geometrie
analitică şi diferenţială. E.D.P., Bucureşti, 1965. 23. Murgulescu E., Donciu N., Popescu V.: Geometrie analitică în spaţiu şi geometrie
diferenţială - Culegere de probleme, E.D.P., Bucureşti, 1973. 24. Neagu, M., Oană, A.: Geometrie superioară în plan şi în spaţiu, Ed. Univ. „Transilvania”
din Braşov, 2008 25. Nicolescu L.: Geometrie diferenţială - Culegere de probleme, Litografia Universităţii Bucureşti,
1982. 26. Obădeanu V.: Elemente de algebră liniară şi geometrie analitică. Ed. Facla, Timişoara, 1981.
130
27. Orman G.: Elemente de algebră liniară, Reprografia Univ. din Braşov, 1974. 28. Pitiş Gh.: Curs de algebră, geometrie şi ecuaţii diferenţiale. Reprografia Univ. din Braşov,
1990. 29. Purcaru M.A.P.: Geometrie diferenţială. Ed. Univ.„Transilvania” din Braşov, 2003. 30. Purcaru M.A.P.: Algebră liniară, geometrie analitică şi ecuaţii diferenţiale,. Tehnopress,
Iaşi, 2005. 31. Radu C., Drăguşin, C., Drăguşin L.: Aplicaţii de algebră, geometrie şi matematici speciale,
E.D.P., Bucureşti, 1991. 32. Radu C.: Geometrie diferenţială. Ecuaţii diferenţiale., Ed. Fair Partners, Bucureşti, 2004. 33. Simionescu C.: Curs de geometrie. Universitatea Braşov, 1977. 34. Simionescu C., Atanasiu Gh.: Curs de geometrie analitică. Universitatea Braşov, 1976. 35. Stavre P.: Teoria curbelor şi suprafeţelor, Reprografia Univ. Craiova, 1968. 36. Stoica, E., Neagu, M.: Algebră liniară. Geometrie analitică şi diferenţială. Culegere de
probleme, Ed. Fair Partners, Bucureşti, 2009. 37. Udrişte C.: Curbe şi suprafeţe, Litografia I.P.B., 1975. 38. Udrişte C.: Algebră liniară, geometrie analitică. Geometry Balkan Press, Bucureşti, 1996. 39. Udrişte C., Radu, C., Dicu C., Mălăncioiu O.: Algebră, geometrie şi ecuaţii diferenţiale.
E.D.P., Bucureşti, 1982. 40. Udrişte C., Radu C., Dicu C., Mălăncioiu O.: Probleme de algebră, geometrie şi ecuaţii
diferenţiale, E.D.P., Bucureşti, 1981.