algebr Ă liniar Ă şi geometrie analitic Ăcivile-old.utcb.ro/cmat/cursrt/cld.pdf · 3 fiind dat...
TRANSCRIPT

Leonard Dăuş
ALGEBRĂ LINIARĂ
şi GEOMETRIE ANALITICĂ

PrefaŃă
Algebra liniară şi geometria analitică reprezintă de multă vreme instrumente
fundamentale pentru disciplinele matematice, abstracte sau aplicate. Cursurile de algebră liniară şi geometrie se regăsesc în programa analitică a oricărei universităŃi cu profil tehnic. Conceptele introduse şi rezultatele obŃinute în cadrul unui astfel de curs, fiind preluate şi utilizate de numeroase discipline tehnice, au condus la necesitatea introducerii algebrei liniare şi a geometriei ca materie de studiu pentru toate specializările din Universitatea Tehnică de ConstrucŃii Bucureşti.
Această lucrare are la bază cursurile pe care le-am predat la Facultatea de Hidrotehnică şi respectă programa analitică a primului semestru aferentă specializării Ingineria Mediului. Principalele teme tratate sunt: calcul vectorial, geometrie analitică în spaŃiu, spaŃii vectoriale şi spaŃii euclidiene, valori proprii şi vectori proprii, forme pătratice şi forme biliniare. De asemenea sunt prezentate şi câteva metode numerice în algebra liniară: metode de rezolvare a sistemelor de ecuaŃii liniare sau pentru determinarea valorilor proprii şi a vectorilor proprii. Toate rezultatele teoretice sunt însoŃite de demonstraŃii complete, ceea ce permite parcurgerea independentă a acestei lucrări de către studenŃii anului I. Deşi cartea are un pronunŃat caracter teoretic, pe parcursul ei am inclus numeroase exerciŃii având rezolvări complete, iar fiecare capitol se încheie cu o secŃiune de exerciŃii propuse, cu diferite grade de dificultate. Astfel, lucrarea poate fi folosită şi în cadrul seminarului.
Doresc să mulŃumesc D-lui. Prof. Dr. Ghiocel Groza pentru atenŃia cu care a citit manuscrisul şi pentru observaŃiile pertinente şi constructive care au marcat pozitiv conceperea acestei lucrări.
Bucureşti, septembrie 2009 Leonard Dăuş
Cuprins
Capitolul I: Vectori liberi..................................................................................
1. Vectori liberi.......................................................................................... 2. OperaŃii cu vectori liberi........................................................................ 3. Expresia analitică a unui vector liber.................................................... 4. Produsul scalar...................................................................................... 5. Produsul vectorial.................................................................................. 6. Produsul mixt........................................................................................ 7. ExerciŃii.................................................................................................
Capitolul II: Planul şi dreapta în spaŃiu........................................................... 1. Planul..................................................................................................... 2. Dreapta.................................................................................................. 3. Fascicol de plane................................................................................... 4. Unghiuri în spaŃiu.................................................................................. 5. DistanŃe în spaŃiu................................................................................... 6. ExerciŃii.................................................................................................
Capitolul III: SpaŃii vectoriale.......................................................................... 1. NoŃiunea de spaŃiu vectorial. Exemple.................................................. 2. DependenŃă şi independenŃă liniară....................................................... 3. Sistem de generatori. Bază a unui spaŃiu vectorial................................ 4. SubspaŃii vectoriale............................................................................... 5. Schimbarea bazei unui spaŃiu vectorial................................................. 6. ExerciŃii.................................................................................................
Capitolul IV: SpaŃii euclidiene..........................................................................
1. Produs scalar. Normă............................................................................. 2. Ortogonalitate. Baze ortonormate......................................................... 3. Polinoame ortogonale............................................................................ 4. ExerciŃii.................................................................................................
Capitolul V: Transformări liniare.................................................................... 1. DefiniŃie. Exemple. ProprietăŃi.............................................................. 2. Nucleul şi imaginea unei transformări liniare....................................... 3. Matricea asociată unei transformări liniare........................................... 4. ExerciŃii.................................................................................................
1 1 4
12 14 19 24 26
29 29 33 37 40 43 48
50 50 52 54 60 65 67
70 70 76 82 90
92 92 96
102 107
Capitolul VI: Sisteme de ecuaŃii liniare............................................................ 1. Metoda lui Gauss................................................................................... 2. Factorizarea LU..................................................................................... 3. Factorizarea Cholesky........................................................................... 4. Metode iterative de rezolvare ale sistemelor de ecuaŃii liniare.............
5. ExerciŃii.................................................................................................
Capitolul VII: Valori proprii şi vectori proprii............................................... 1. Valori proprii şi vectori proprii............................................................. 2. Localizarea valorilor proprii.................................................................. 3. Diagonalizarea unui endomorfism (sau a unei matrice)........................ 4. Metoda puterii....................................................................................... 5. ExerciŃii.................................................................................................
Capitolul VIII: Clase speciale de matrice........................................................
1. Matrice ortogonale................................................................................. 2. Matrice simetrice................................................................................... 3. RotaŃii şi simetrii................................................................................... 4. ExerciŃii.................................................................................................
Capitolul IX: Forme biliniare. Forme pătratice..............................................
1. Forme biliniare...................................................................................... 2. Forme pătratice. Reducerea la forma canonică..................................... 3. Signatura unei forme pătratice. Teorema inerŃiei.................................. 4. ExerciŃii.................................................................................................
Bibliografie.......................................................................................................... Indice...................................................................................................................
109 109 114 123 127 135
138 138 146 149 155 158
160 160 164 166 174
176 176 179 189 192
195
197
1
Capitolul I
Vectori liberi
1. Vectori liberi
Fie 3E spaŃiul tridimensional al geometriei elementare, spaŃiu conceput ca o
mulŃime de puncte şi în care sunt valabile axiomele lui Euclid. DefiniŃii 1.1: Se numeşte vector legat sau segment orientat o pereche
ordonată de puncte 33 EE(A,B) ×∈
fig. 1
Punctul A se numeşte originea, iar B vârful sau extremitatea vectorului legat
(A,B). Dacă BA ≠ , atunci dreapta determinată de punctele A şi B se numeşte
direcŃia vectorului legat (A,B). Dacă BA = , atunci obŃinem vectorul legat (A,A), numit vector legat nul. DirecŃia oricărui vector legat nul este nedeterminată.
Se numeşte lungime sau normă sau modul a unui vector legat (A,B) numărul real pozitiv care reprezintă distanŃa dintre punctele A şi B (relativă la o unitate de măsură fixată).
Evident, un vector legat este nul dacă şi numai dacă lungimea lui este zero. DefiniŃii1.2: Fie (A,B) şi (C,D) doi vectori legaŃi nenuli.
A
B

2
1. Spunem că (A,B) şi (C,D) au aceeaşi direcŃie dacă dreptele lor suport sunt paralele. În cazul particular în care dreptele suport coincid, vom spune că vectorii legaŃi sunt coliniari.
2. Dacă A,B,C,D sunt puncte necoliniare, vectorii legaŃi (A,B) şi (C,D) au aceeaşi direcŃie, iar punctele B şi D se află de aceeaşi parte a dreptei AC, vom spune că (A,B) şi (C,D) au acelaşi sens (fig. 2). Dacă A,B,C,D sunt puncte coliniare şi există două puncte E, F, nesituate pe dreapta determinată de cele patru puncte iniŃiale, astfel încât vectorul legat (E,F) are acelaşi sens şi cu (A,B) şi cu (C,D), vom spune că (A,B) şi (C,D) au acelaşi sens. Doi vectori care au aceeaşi direcŃie dar nu au acelaşi sens, se spune că au sensuri opuse.
fig. 2
DefiniŃia 1.3: Doi vectori legaŃi (A,B) şi (C,D) se numesc echipolenŃi şi vom
nota (A,B)~(C,D), dacă au acelaşi sens şi aceeaşi lungime sau, echivalent, dacă segmentele [AD] şi [BC] au acelaşi mijloc.
fig. 3
ObservaŃie: Se poate verifica fără dificultate că relaŃia de echipolenŃă pe mulŃimea vectorilor legaŃi are proprietăŃile:
1. este reflexivă: (A,B)~(A,B); 2. este simetrică: dacă (A,B)~(C,D), atunci şi (C,D)~(A,B); 3. este tranzitivă: dacă (A,B)~(C,D) şi (C,D)~(E,F), atunci (A,B)~(E,F).
Astfel, putem afirma că echipolenŃa vectorilor legaŃi este o relaŃie de echivalenŃă.
RelaŃia de echipolenŃă poate fi extinsă şi la vectorii legaŃi nuli: orice doi vectori legaŃi nuli sunt echipolenŃi între ei.
C A
B D
A
B
C
D
3
Fiind dat vectorul legat (A,B), există o infinitate de vectori legaŃi echipolenŃi cu (A,B) (practic, cu originea în orice punct al spaŃiului 3E putem construi un vector
echipolent cu (A,B) şi numai unul). DefiniŃia 1.4: Clasele de echivalenŃă ale vectorilor legaŃi, relativ la relaŃia de
echipolenŃă, se numesc vectori liberi. Cu alte cuvinte, un vector liber reprezintă mulŃimea tuturor vectorilor legaŃi echipolenŃi cu un vector legat dat. Dacă (A,B) este
un vector legat, atunci vom nota cu AB vectorul liber corespunzător, adică
),(~),(/),( 33 BADCEEDCAB ×∈=
Vom nota cu 3V mulŃimea tuturor vectorilor liberi din spaŃiul 3E .
Un vector legat (A,B) determină un vector liber (o clasă de echivalenŃă) AB şi vom spune că este un reprezentant al vectorului liber determinat. Vom nota
ABA,B ∈ )( . Uneori, vectorii liberi se notează şi cu litere mici cu săgeată deasupra:
...,,,, vubarrrr
DefiniŃia 1.5: Prin direcŃie, sens şi lungime a unui vector liber vom înŃelege
direcŃia, sensul şi respectiv lungimea unui reprezentant al vectorului liber. Dacă AB
este un vector liber, vom nota cu AB lungimea vectorului liber.
ObservaŃie: Un vector legat este caracterizat prin: origine, direcŃie, sens şi
lungime. În cazul unui vector liber, caracteristice sunt numai direcŃia, sensul şi lungimea. Aşadar putem considera un vector liber dat v
r ca având originea în orice
punct din spaŃiu. DefiniŃia 1.6: Vectorul liber de lungime zero se numeşte vector nul şi se
notează 0r
. Ca reprezentant al vectorului nul putem lua vectorul legat (A,A), cu 3EA∈
arbitrar. DirecŃia şi sensul vectorului liber nul sunt nedeterminate. DefiniŃia 1.7: Un vector liber de lungime unu se numeşte versor.
DefiniŃia 1.8: Doi vectori liberi ar
şi br
se numesc egali şi scriem barr
= în cazul în care reprezentanŃii lor sunt echipolenŃi.
DefiniŃia 1.9: Doi vectori liberi nenuli ar
şi br
care au aceeaşi direcŃie se numesc vectori coliniari. Trei vectori liberi nenuli care admit reprezentanŃi situaŃi într-un acelaşi plan se numesc coplanari.
DefiniŃia 1.10: Doi vectori coliniari care au aceeaşi lungime, dar sensuri
opuse se numesc vectori opuşi; opusul vectorului liber ar
va fi notat cu ar
− .
4
2. OperaŃii cu vectori liberi
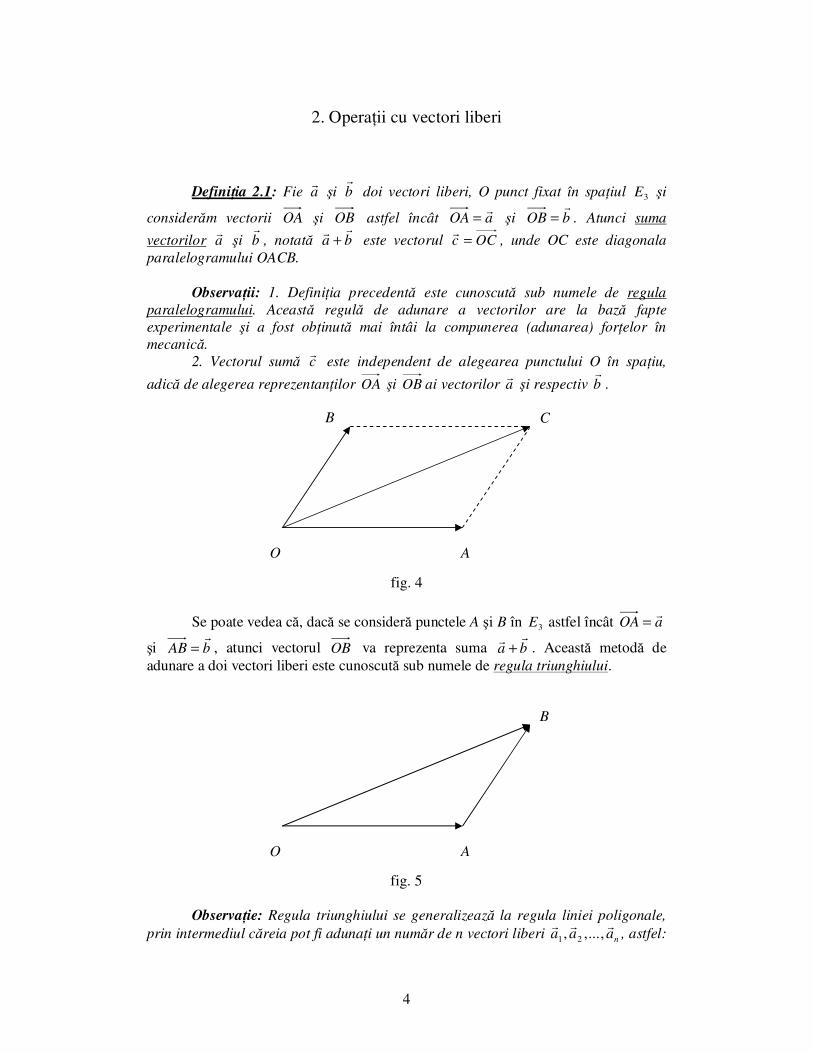
DefiniŃia 2.1: Fie ar
şi br
doi vectori liberi, O punct fixat în spaŃiul 3E şi
considerăm vectorii OA şi OB astfel încât aOAr
= şi bOBr
= . Atunci suma
vectorilor ar
şi br
, notată barr
+ este vectorul OCc =r
, unde OC este diagonala paralelogramului OACB.
ObservaŃii: 1. DefiniŃia precedentă este cunoscută sub numele de regula
paralelogramului. Această regulă de adunare a vectorilor are la bază fapte experimentale şi a fost obŃinută mai întâi la compunerea (adunarea) forŃelor în mecanică.
2. Vectorul sumă cr
este independent de alegearea punctului O în spaŃiu,
adică de alegerea reprezentanŃilor OA şi OB ai vectorilor ar
şi respectiv br
.
fig. 4
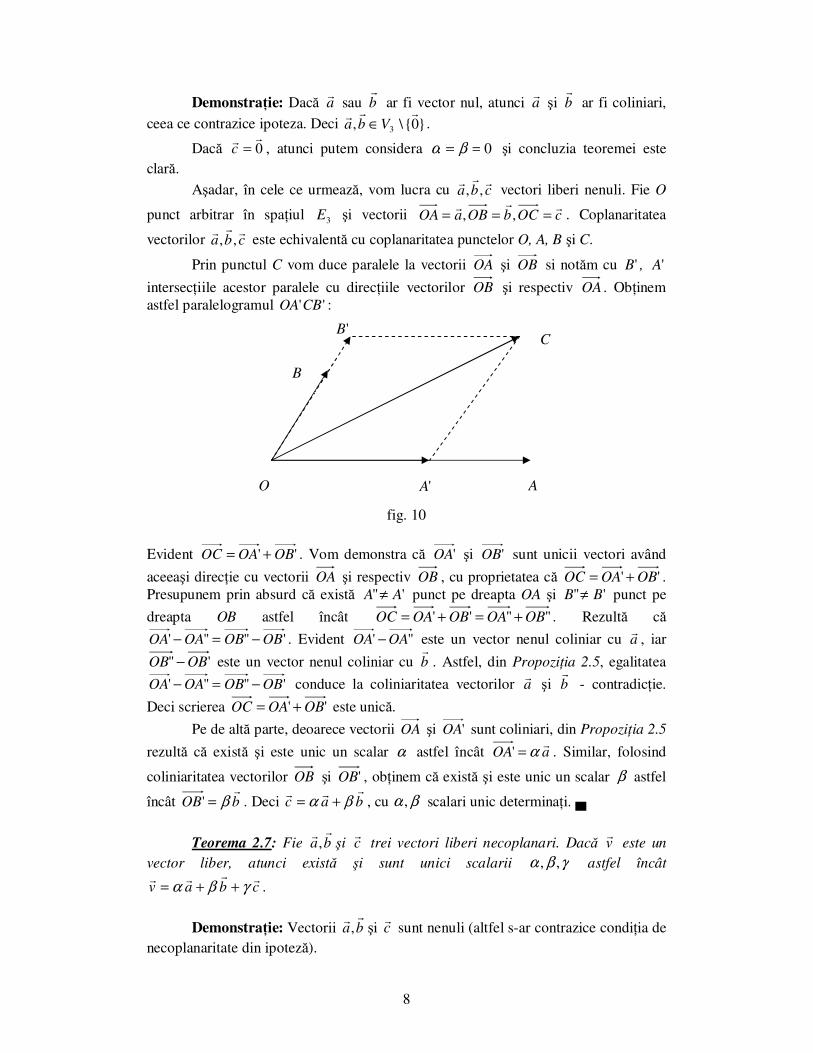
Se poate vedea că, dacă se consideră punctele A şi B în 3E astfel încât aOAr
=
şi bABr
= , atunci vectorul OB va reprezenta suma barr
+ . Această metodă de adunare a doi vectori liberi este cunoscută sub numele de regula triunghiului.
fig. 5
ObservaŃie: Regula triunghiului se generalizează la regula liniei poligonale,
prin intermediul căreia pot fi adunaŃi un număr de n vectori liberi naaarrr
,...,, 21 , astfel:
O A
B
O A
B C

5
pornind din punctul O se construieşte linia poligonală nAAOA ...21 , cu
...,, 22111 aAAaOArr
== , nnn aAAr
=−1 ; atunci suma naaarrr
+++ ...21 este nOAs =r
.
fig. 6
PropoziŃia 2.2: OperaŃia de adunare a vectorilor liberi are următoarele
proprietăŃi:
1. este comutativă: abbarrrr
+=+ , pentru orice 3, Vba ∈rr
;
2. este asociativă: )()( cbacbarrrrrr
++=++ , pentru orice 3,, Vcba ∈rrr
;
3. are element neutru, vectorul nul: aaarrrrr
=+=+ 00 , pentru orice 3Va ∈r
;
4. orice element este simetrizabil: pentru orice vector liber ar
există un vector
notat ar
− astfel încât 0)()(rrrrr
=+−=−+ aaaa ( ar
− este chiar opusul vectorului ar
, definit în paragraful anterior).
DemonstraŃie: 1. Proprietatea de comutativitate a adunării vectorilor liberi
este imediată dacă se Ńine cont de regula paralelogramului. 2. Fie 3,, Vcba ∈
rrr arbitari. Proprietatea de asociativitate este evidentă dacă se
foloseşte regula triunghiului:
fig. 7
3. şi 4. Clar.
ObservaŃii: 1. Din PropoziŃia precedentă rezultă că ),( 3 +V este un grup
abelian.
cbrr
+ ar
br
cr
)( cbarrr
++
barr
+ ar
br
cr
cbarrr
++ )(
2ar
nar
sr
O
1A
2A
nA
1ar

6
2. Cu ajutorul vectorului opus se poate efectua scăderea a doi vectori astfel:
)( babarrrr
−+=− . Din punct de vedere grafic, diferenŃa barr
− este cea de-a doua
diagonală a paralelogramului construit pe vectorii ar
şi br
, cu sensul către vectorul din care se scade.
fig. 8
DefiniŃia 2.3: Fie a
r un vector liber şi R∈λ . Se numeşte înmulŃire a
vectorului ar
cu scalarul (numărul real) λ şi se notează ar
λ vectorul definit astfel:
- dacă 0≠ar
şi 0≠λ , atunci ar
λ are lungimea ar
λ , aceeaşi direcŃie cu ar
,
iar sensul coincide cu al lui ar
sau este opus sensului lui ar
, după cum 0>λ sau 0<λ .
- dacă 0=ar
sau 0=λ , atunci 0rr
=aλ .
PropoziŃia 2.4: ÎnmulŃirea vectorilor liberi cu scalari are proprietăŃile: 1. aaa
rrrµλµλ +=+ )( , 3,, Va ∈∀∈∀
rRµλ ;
2. babarrrr
λλλ +=+ )( , 3,, Vba ∈∀∈∀rr
Rλ ;
3. )()( aarr
µλλµ = , 3,, Va ∈∀∈∀r
Rµλ ;
4. aarr
=1 , 3Va ∈r
.
DemonstraŃie: Să observăm mai întâi că atât scalarii cât şi vectorii care apar
în relaŃiile din propoziŃie pot fi presupuşi nenuli (în caz contrar, relaŃiile sunt evidente, din definiŃia înmulŃirii unui vector liber cu un scalar).
1. Vom considera următoarele cazuri: i) 0, >µλ . Rezultă că 0>+ µλ . Vectorii a
r)( µλ + şi aa
rrµλ + vor avea
aceeaşi direcŃie şi acelaşi sens cu ar
. Cu privire la lungimile lor, obŃinem: aaaaaaaaarrrrrrrrr
µλµλµλµλµλµλ +=+=+=+=+=+ )()( .
Astfel putem conchide că în acest caz aaarrr
µλµλ +=+ )( .
ii) 0, <µλ se tratează similar cazului anterior. iii) 0>λ şi 0<µ . Fără a restrânge generalitatea, putem presupune
0>+ µλ . Atunci: aaaaaaaarrrrrrrr
)()()()( µλµµµλµµµλµλ +=+−++=+−+=+ (la penultima egalitate s-a folosit punctul i), scalarii µλ + şi µ− fiind ambii pozitivi).
iv) 0<λ şi 0>µ se tratează similar cazului anterior.
ar
br
barr
− barr
+

7
2. Considerăm vectorii aOAr
= şi bABr
= . Atunci baOBrr
+= . Presupunem
0>λ (cazul 0<λ fiind similar). Fie punctele 3',' EBA ∈ astfel încât aOAr
λ=' şi
)(' baOBrr
+= λ .
fig. 9
Atunci avem asemănarea ''~ BOAOAB ∆∆ , deci segmentele [ ]AB şi [ ]''BA vor fi
paralele, iar între lungimile lor există relaŃia: [ ] [ ]ABBA λ='' . Astfel, obŃinem că
bABBAr
λλ =='' . Aplicând regula triunghiului găsim că '''' BAOAOB += , adică
babarrrr
λλλ +=+ )( . 3. şi 4. Clar, din definiŃia înmulŃirii unui vector liber cu un scalar, dacă se Ńine
cont de orientările şi lungimile vectorilor care apar în ambii membri ai egalităŃilor de demonstrat.
PropoziŃia 2.5: Fie 0\, 3
rrrVba ∈ doi vectori liberi. Atunci a
r şi b
r sunt
coliniari dacă şi numai dacă există un unic scalar λ astfel încât abrr
λ= .
DemonstraŃie: Presupunem că vectorii ar
şi br
sunt coliniari. Considerăm
versorii lor a
au r
rr
= şi b
bv r
rr
= . Deoarece ar
şi br
sunt coliniari, atunci ur
şi vr
vor fi
coliniari. łinând cont şi că 1== vurr
, rezultă că ur
şi vr
vor fi sau egali sau opuşi,
deci aa
bb
rr
rr
= sau aa
bb
rr
rr
−= . Astfel abrr
λ= , cu R∈λ . Unicitatea lui λ este clară,
deoarece a
br
r
=λ , dacă ar
şi br
au acelaşi sens, respectiv a
br
r
−=λ , dacă ar
şi br
au
sensuri opuse.
Teorema 2.6: Fie ar
şi br
doi vectori liberi necoliniari. Dacă cr
este un
vector liber coplanar cu vectorii ar
şi br
, atunci există şi sunt unici scalarii α şi β
astfel încât bacrrr
βα += .
O A 'A
B 'B
8
DemonstraŃie: Dacă ar
sau br
ar fi vector nul, atunci ar
şi br
ar fi coliniari,
ceea ce contrazice ipoteza. Deci 0\, 3
rrrVba ∈ .
Dacă 0rr
=c , atunci putem considera 0== βα şi concluzia teoremei este clară.
Aşadar, în cele ce urmează, vom lucra cu cbarrr
,, vectori liberi nenuli. Fie O
punct arbitrar în spaŃiul 3E şi vectorii cOCbOBaOArrr
=== ,, . Coplanaritatea
vectorilor cbarrr
,, este echivalentă cu coplanaritatea punctelor O, A, B şi C.
Prin punctul C vom duce paralele la vectorii OA şi OB si notăm cu 'B , 'A
intersecŃiile acestor paralele cu direcŃiile vectorilor OB şi respectiv OA . ObŃinem astfel paralelogramul ''CBOA :
fig. 10
Evident '' OBOAOC += . Vom demonstra că 'OA şi 'OB sunt unicii vectori având
aceeaşi direcŃie cu vectorii OA şi respectiv OB , cu proprietatea că '' OBOAOC += . Presupunem prin absurd că există '" AA ≠ punct pe dreapta OA şi '" BB ≠ punct pe
dreapta OB astfel încât ""'' OBOAOBOAOC +=+= . Rezultă că
'""' OBOBOAOA −=− . Evident "' OAOA − este un vector nenul coliniar cu ar
, iar
'" OBOB − este un vector nenul coliniar cu br
. Astfel, din PropoziŃia 2.5, egalitatea
'""' OBOBOAOA −=− conduce la coliniaritatea vectorilor ar
şi br
- contradicŃie.
Deci scrierea '' OBOAOC += este unică.
Pe de altă parte, deoarece vectorii OA şi 'OA sunt coliniari, din PropoziŃia 2.5
rezultă că există şi este unic un scalar α astfel încât aOAr
α=' . Similar, folosind
coliniaritatea vectorilor OB şi 'OB , obŃinem că există şi este unic un scalar β astfel
încât bOBr
β=' . Deci bacrrr
βα += , cu βα , scalari unic determinaŃi.
Teorema 2.7: Fie barr
, şi cr
trei vectori liberi necoplanari. Dacă vr
este un vector liber, atunci există şi sunt unici scalarii γβα ,, astfel încât
cbavrrrr
γβα ++= .
DemonstraŃie: Vectorii barr
, şi cr
sunt nenuli (altfel s-ar contrazice condiŃia de necoplanaritate din ipoteză).
O 'A A
C 'B
B
9
Dacă 0rr
=v , atunci putem lua 0=== γβα şi concluzia teoremei este clară.
De asemenea, dacă vr
este coplanar cu doi dintre vectorii cbarrr
,, , atunci ne reducem la cazul teoremei precedente.
Astfel, în cele ce urmează, vom considera că vectorii cbarrr
,, şi vr
sunt nenuli şi
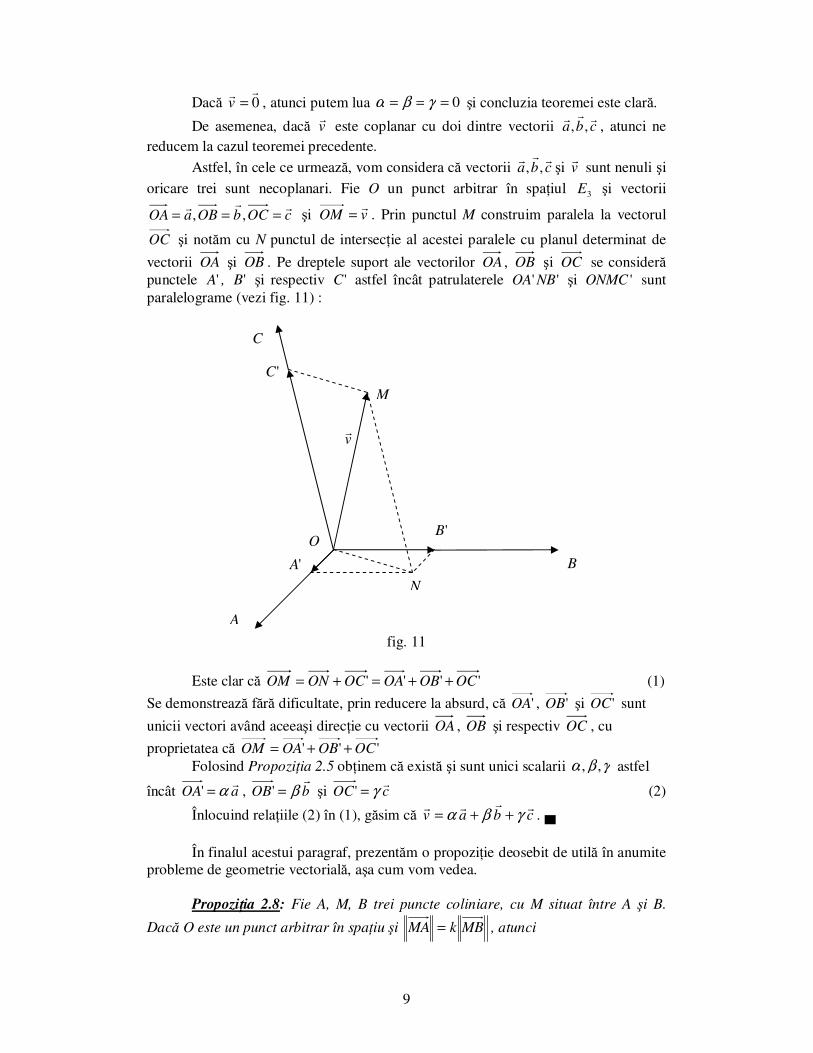
oricare trei sunt necoplanari. Fie O un punct arbitrar în spaŃiul 3E şi vectorii
cOCbOBaOArrr
=== ,, şi vOMr
= . Prin punctul M construim paralela la vectorul
OC şi notăm cu N punctul de intersecŃie al acestei paralele cu planul determinat de
vectorii OA şi OB . Pe dreptele suport ale vectorilor OA , OB şi OC se consideră punctele 'A , 'B şi respectiv 'C astfel încât patrulaterele '' NBOA şi 'ONMC sunt paralelograme (vezi fig. 11) :
fig. 11
Este clar că '''' OCOBOAOCONOM ++=+= (1)
Se demonstrează fără dificultate, prin reducere la absurd, că 'OA , 'OB şi 'OC sunt
unicii vectori având aceeaşi direcŃie cu vectorii OA , OB şi respectiv OC , cu
proprietatea că ''' OCOBOAOM ++= Folosind PropoziŃia 2.5 obŃinem că există şi sunt unici scalarii γβα ,, astfel
încât aOAr
α=' , bOBr
β=' şi cOCr
γ=' (2)
Înlocuind relaŃiile (2) în (1), găsim că cbavrrrr
γβα ++= . În finalul acestui paragraf, prezentăm o propoziŃie deosebit de utilă în anumite
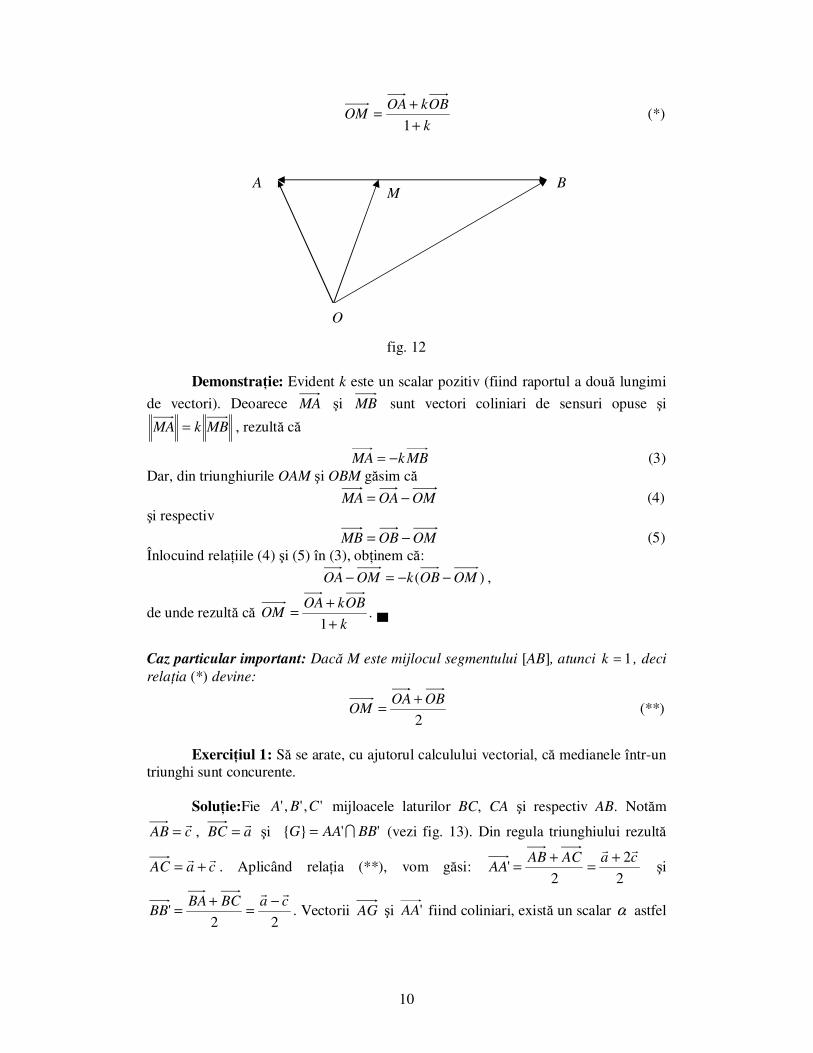
probleme de geometrie vectorială, aşa cum vom vedea. PropoziŃia 2.8: Fie A, M, B trei puncte coliniare, cu M situat între A şi B.
Dacă O este un punct arbitrar în spaŃiu şi MBkMA = , atunci
B 'A
'B O
'C
A
M
N
vr
C
10
k
OBkOAOM
+
+=
1 (*)
fig. 12
DemonstraŃie: Evident k este un scalar pozitiv (fiind raportul a două lungimi
de vectori). Deoarece MA şi MB sunt vectori coliniari de sensuri opuse şi
MBkMA = , rezultă că
MBkMA −= (3) Dar, din triunghiurile OAM şi OBM găsim că
OMOAMA −= (4) şi respectiv
OMOBMB −= (5) Înlocuind relaŃiile (4) şi (5) în (3), obŃinem că:
)( OMOBkOMOA −−=− ,
de unde rezultă că k
OBkOAOM
+
+=
1.
Caz particular important: Dacă M este mijlocul segmentului [AB], atunci 1=k , deci relaŃia (*) devine:
2
OBOAOM
+= (**)
ExerciŃiul 1: Să se arate, cu ajutorul calculului vectorial, că medianele într-un
triunghi sunt concurente.
SoluŃie:Fie ',',' CBA mijloacele laturilor BC, CA şi respectiv AB. Notăm
cABr
= , aBCr
= şi '' BBAAG I= (vezi fig. 13). Din regula triunghiului rezultă
caACrr
+= . Aplicând relaŃia (**), vom găsi: 2
2
2'
caACABAA
rr+
=+
= şi
22'
caBCBABB
rr−
=+
= . Vectorii AG şi 'AA fiind coliniari, există un scalar α astfel
O
B A M

11
încât 'AAAG α= . Similar, putem găsi scalarul β astfel încât 'BBBG β= . Dar
AGBGAB =+ .
fig. 13
Înlocuind în funcŃie de vectorii a
r şi c
v, egalitatea precedentă conduce la
relaŃia: 2
2
2
cacac
rrrrr +
=−
+ αβ . Prin gruparea convenabilă a termenilor se obŃine că:
carr
−−=
−
21
22
βα
βα.
Pentru a exista triunghiul ABC este clar că vectorii ar
şi cv
trebuie să fie necoliniari.
Astfel, din egalitatea precedentă rezultă că 02
122
=−−=−β
αβα
, de unde se obŃine
că 3
2== βα .
Deci punctul G este situat pe medianele 'AA şi 'BB la două treimi de vârf şi o treime de bază. Dacă vom considera acum ''' CCAAG I= , printr-un raŃionament similar celui anterior vom obŃine că 'G este situat pe medianele 'AA şi 'CC la două treimi de vârf şi o treime de bază şi astfel 'GG = ceea ce înseamnă concurenŃa medianelor triunghiului ABC.
ObservaŃie: Pe parcursul rezolvării ExerciŃiului 1 s-a demonstrat că centrul de greutate al unui triunghi se află situat la două treimi de vârf şi o treime de bază pe fiecare dintre mediane.
ExerciŃiul 2: Fie ABC un triunghi oarecare şi G centrul său de greutate. Dacă
O este un punct arbitrar în spaŃiu, să se arate că
OGOCOBOA 3=++ .
A
B 'A
'B
C
G

12
fig. 14
SoluŃie: Fie 'A mijlocul laturii BC. După cum am văzut, centrul de greutate
într-un triunghi se află situat la o treime de bază şi două treimi de vârf, pe fiecare
dintre mediane. Astfel, .'2 GAGA = Aplicând relaŃia (*) punctelor coliniare A, G,
'A , va rezulta că ( )'23
1
21
'2OAOA
OAOAOG +=
+
+= .
'A fiind mijlocul segmentului [BC], din (**) obŃinem că .2
'OCOB
OA+
= Din
ultimele două relaŃii se obŃine egalitatea cerută. Lăsăm cititorului ca temă următorul: ExerciŃiul 3: Fie ABCD un tetraedru oarecare şi G centrul său de greutate.
Dacă O este un punct arbitrar în spaŃiu, să se arate că
OGODOCOBOA 4=+++ . (Centrul de greutate al unui tetraedru se afla la intersecŃia medianelor tetraedrului – segmentele care unesc vârfurile tetraedrului cu centrele de greutate ale feŃelor opuse. Centrul de greutate se află poziŃionat la un sfert de faŃă şi trei sferturi de vârf, pe fiecare dintre medianele tetraedrului.)
3. Expresia analitică a unui vector liber
Există mai multe posibilităŃi de a descrie şi studia obiectele geometrice în spaŃiul tridimensional. Cea mai veche metodă, utilizată pentru prima dată de
O A
B C
'A
G
13
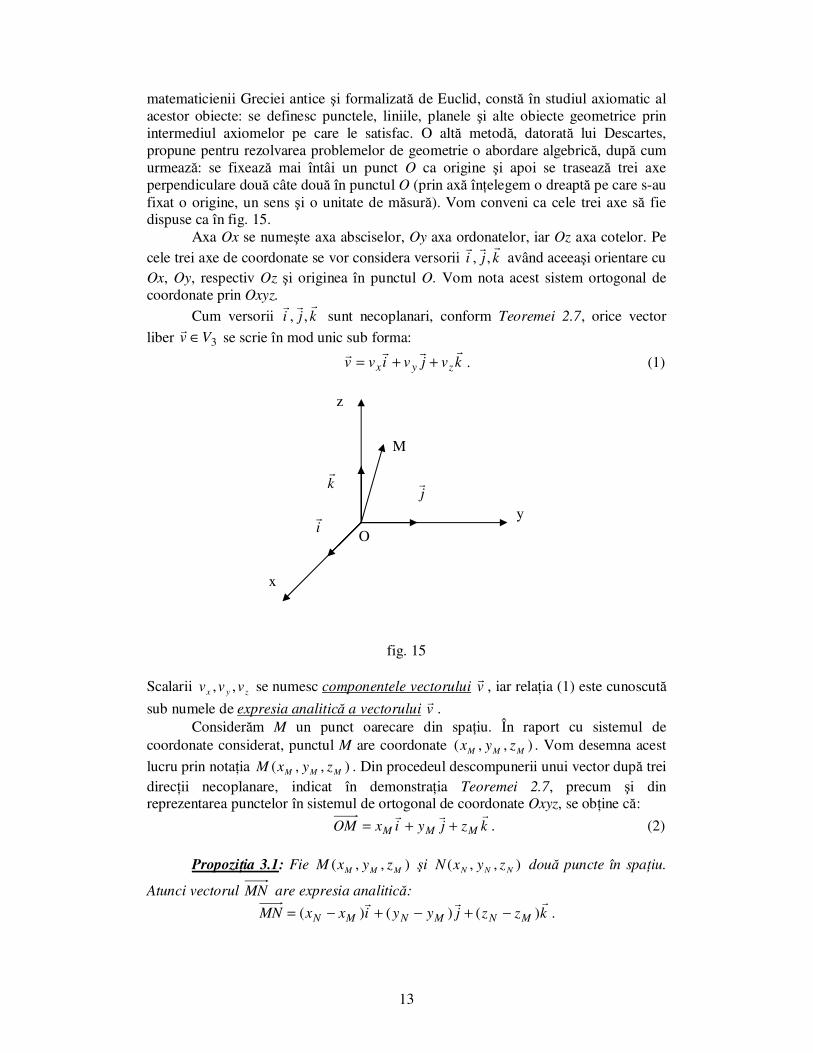
matematicienii Greciei antice şi formalizată de Euclid, constă în studiul axiomatic al acestor obiecte: se definesc punctele, liniile, planele şi alte obiecte geometrice prin intermediul axiomelor pe care le satisfac. O altă metodă, datorată lui Descartes, propune pentru rezolvarea problemelor de geometrie o abordare algebrică, după cum urmează: se fixează mai întâi un punct O ca origine şi apoi se trasează trei axe perpendiculare două câte două în punctul O (prin axă înŃelegem o dreaptă pe care s-au fixat o origine, un sens şi o unitate de măsură). Vom conveni ca cele trei axe să fie dispuse ca în fig. 15.
Axa Ox se numeşte axa absciselor, Oy axa ordonatelor, iar Oz axa cotelor. Pe cele trei axe de coordonate se vor considera versorii kji
rrr,, având aceeaşi orientare cu
Ox, Oy, respectiv Oz şi originea în punctul O. Vom nota acest sistem ortogonal de coordonate prin Oxyz.
Cum versorii kjirrr
,, sunt necoplanari, conform Teoremei 2.7, orice vector
liber 3Vv ∈r
se scrie în mod unic sub forma:
kvjvivv zyx
rrrr++= . (1)
fig. 15
Scalarii zyx vvv ,, se numesc componentele vectorului vr
, iar relaŃia (1) este cunoscută
sub numele de expresia analitică a vectorului vr
. Considerăm M un punct oarecare din spaŃiu. În raport cu sistemul de
coordonate considerat, punctul M are coordonate ),,( MMM zyx . Vom desemna acest
lucru prin notaŃia ),,( MMM zyxM . Din procedeul descompunerii unui vector după trei direcŃii necoplanare, indicat în demonstraŃia Teoremei 2.7, precum şi din reprezentarea punctelor în sistemul de ortogonal de coordonate Oxyz, se obŃine că:
kzjyixOM MMM
rrr++= . (2)
PropoziŃia 3.1: Fie ),,( MMM zyxM şi ),,( NNN zyxN două puncte în spaŃiu.
Atunci vectorul MN are expresia analitică:
kzzjyyixxMN MNMNMN
rrr)()()( −+−+−= .
O
x
y
z
ir
jr
kr
M
14
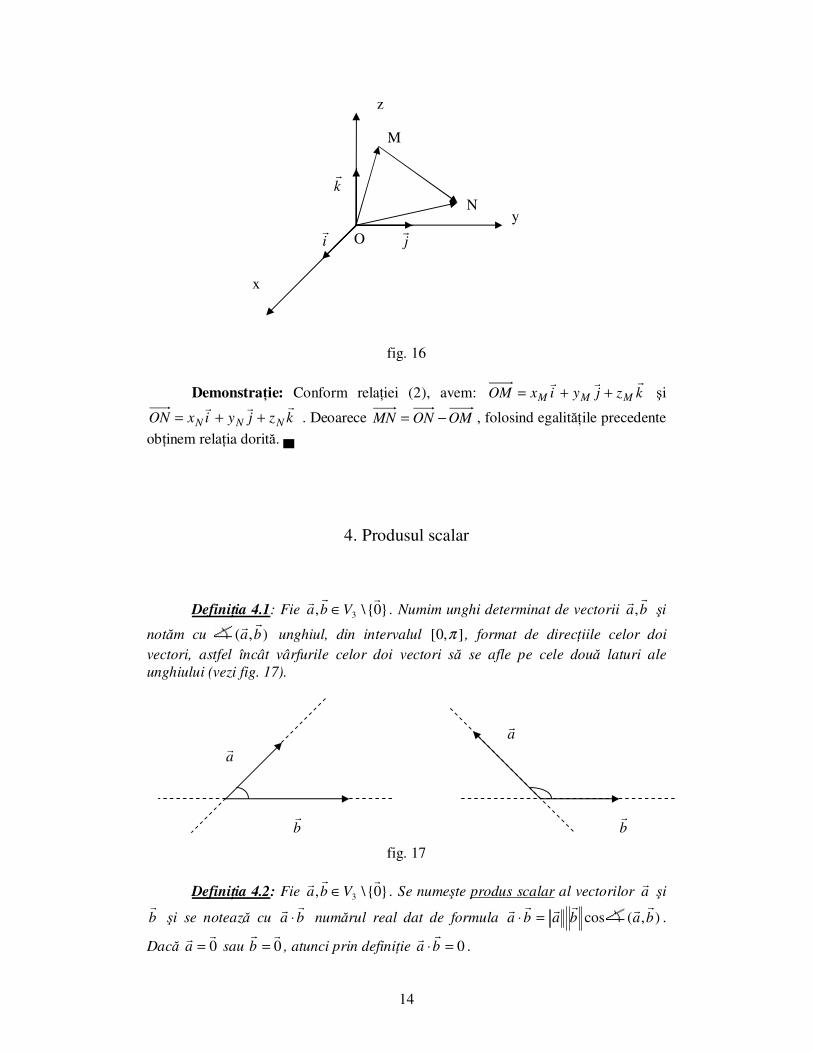
fig. 16
DemonstraŃie: Conform relaŃiei (2), avem: kzjyixOM MMM
rrr++= şi
kzjyixON NNN
rrr++= . Deoarece OMONMN −= , folosind egalităŃile precedente
obŃinem relaŃia dorită.
4. Produsul scalar
DefiniŃia 4.1: Fie 0\, 3
rrrVba ∈ . Numim unghi determinat de vectorii ba
rr, şi
notăm cu ),( barr
unghiul, din intervalul ],0[ π , format de direcŃiile celor doi vectori, astfel încât vârfurile celor doi vectori să se afle pe cele două laturi ale unghiului (vezi fig. 17).
fig. 17
DefiniŃia 4.2: Fie 0\, 3
rrrVba ∈ . Se numeşte produs scalar al vectorilor a
r şi
br
şi se notează cu barr
⋅ numărul real dat de formula cosbabarrrr
=⋅ ),( barr
.
Dacă 0rr
=a sau 0rr
=b , atunci prin definiŃie 0=⋅barr
.
ar
br
ar
br
O
x
y
z
ir
jr
kr
M
N

15
ObsevaŃie: Din definiŃia precedentă se obŃine imediat o primă formulă de
calcul a unghiului dintre doi vectori nenuli:
cosba
baba rr
rrrr ⋅=),(
Astfel, ca o consecinŃă, obŃinem că doi vectori nenuli ar
şi br
sunt ortogonali dacă şi
numai dacă 0=⋅barr
.
Interpretarea mecanică a produsului scalar: Dacă ar
şi br
sunt doi vectori, O
este un punct material asupra căruia se exercită o forŃă aFrr
= şi care efectuează o
deplasare definită de vectorul br
, atunci produsul scalar barr
⋅ este chiar lucrul
mecanic L al forŃei Fr
pentru deplasarea br
.
fig. 18
DefiniŃia 4.3: Dacă 0\, 3
rrrVba ∈ , iar =θ ),( ba
rr, atunci numărul real
θcosar
se numeşte mărimea proiecŃiei ortogonale a vectorului ar
pe vectorul br
şi
se notează aprb
rr . Dacă 0
rr=a , atunci prin definiŃie 0=aprb
rr . Dacă 0
rr=b , atunci nu
există aprb
rr .
ObservaŃie: Din definiŃiile produsului scalar şi respectiv a mărimii proiecŃiei
ortogonale a unui vector pe un alt vector, obŃinem că
bpraaprbba ab
rrrrrrrr ==⋅ .
PropoziŃia 4.4: Mărimea proiecŃiei ortogonale are proprietăŃile:
1. bpraprbapr ccc
rrrrrrr +=+ )( , pentru orice 0\,, 3
rrrrVcba ∈ ;
2. aprapr bb
rrrr λλ =)( , pentru orice 0\, 3
rrrVba ∈ şi R∈λ .
DemonstraŃie: 1. Fie O punct arbitrar în spaŃiul 3E şi punctele A,B,C astfel
încât ,, bOBaOArr
== cOCr
= . Atunci aprOA cr
r=' , bprOB c
rr=' şi
)(' baprOD c
rrr += (vezi fig. 19). Deoarece '''''' OAOBDBOBOD +=+= ,
rezultă că bpraprbapr ccc
rrrrrrr +=+ )( .
aFrr
=
br
O
16
fig. 19
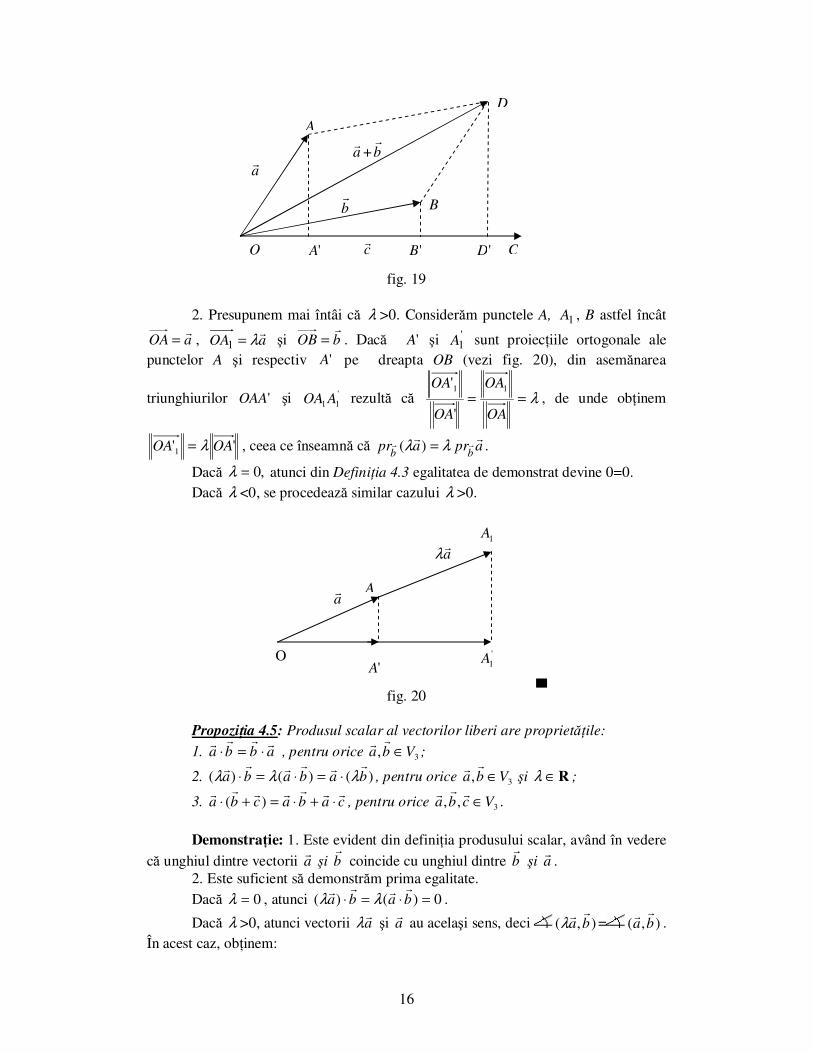
2. Presupunem mai întâi că λ >0. Considerăm punctele A, 1A , B astfel încât
aOAr
= , aOAr
λ=1 şi bOBr
= . Dacă 'A şi '1A sunt proiecŃiile ortogonale ale
punctelor A şi respectiv 'A pe dreapta OB (vezi fig. 20), din asemănarea
triunghiurilor 'OAA şi '11 AOA rezultă că λ==
OA
OA
OA
OA 11
'
', de unde obŃinem
''1 OAOA λ= , ceea ce înseamnă că aprapr bb
rrrr λλ =)( .
Dacă ,0=λ atunci din DefiniŃia 4.3 egalitatea de demonstrat devine 0=0. Dacă λ <0, se procedează similar cazului λ >0.
fig. 20
PropoziŃia 4.5: Produsul scalar al vectorilor liberi are proprietăŃile:
1. abbarrrr
⋅=⋅ , pentru orice 3, Vba ∈rr
;
2. )()()( bababarrrrrr
λλλ ⋅=⋅=⋅ , pentru orice 3, Vba ∈rr
şi R∈λ ;
3. cabacbarrrrrrr
⋅+⋅=+⋅ )( , pentru orice 3,, Vcba ∈rrr
.
DemonstraŃie: 1. Este evident din definiŃia produsului scalar, având în vedere
că unghiul dintre vectorii ar
şi br
coincide cu unghiul dintre br
şi ar
. 2. Este suficient să demonstrăm prima egalitate.
Dacă 0=λ , atunci 0)()( =⋅=⋅ babarrrr
λλ .
Dacă λ >0, atunci vectorii ar
λ şi ar
au acelaşi sens, deci ),( barr
λ = ),( barr
. În acest caz, obŃinem:
ar
ar
λ
A
'A
1A
'1A O
O
A
'B
B
'D
D
C 'A
ar
br
cr
ar
+br

17
cos)( babarrrr
λλ =⋅ cos),( babarrrr
λλ = )(),( babarrrr
⋅= λ .
Dacă λ <0, atunci vectorii ar
λ şi ar
au sensuri opuse. Astfel
),( barr
λ = −π ),( barr
deci cos cos),( −=barr
λ ),( barr
. În acest caz, obŃinem:
cos)( babarrrr
λλ =⋅ cos(),( −−= babarrrr
λλ )()),( babarrrr
⋅= λ .
3. łinând cont, pe de-o parte de relaŃia dintre produsul scalar şi mărimea proiecŃiei ortogonale, iar pe de altă parte de PropoziŃia 4.4, succesiv obŃinem:
cabacprabpracbpracba aaarrrrrrrrrrrrrr
rrr ⋅+⋅=+=+=+⋅ )()(
Teorema 4.6 (Expresia analitică a produsului scalar): Fie
kajaiaa zyx
rrrr++= şi kbjbibb zyx
rrrr++= doi vectori liberi, daŃi sub formă
analitică. Atunci produsul lor scalar se calculează cu formula:
zzyyxx babababa ++=⋅rr
.
DemonstraŃie: Determinăm mai întâi valorile produsului scalar pe mulŃimea versorilor ,, kji
rrr. De exemplu, din definiŃia produsului scalar obŃinem:
10cos 0 ==⋅ iiiirrrr
şi 090cos 0 ==⋅ jijirrrr
,
rezultatele produsului scalar pe mulŃimea versorilor axelor de coordonate putând fi date sub forma tabelului:
łinând cont de proprietăŃile produsului scalar şi de tabelul precedent, obŃinem succesiv:
=⋅+⋅+⋅+⋅+⋅+⋅
+⋅+⋅+⋅=++⋅++=⋅
kkbajkbaikbakjbajjbaijba
kibajibaiibakbjbibkajaiaba
zzyzxzzyyyxy
zxyxxxzyxzyx
rrrrrrrrrrrr
rrrrrrrrrrrrrr)()(
zzyyxx bababa ++
Corolarul 4.7: Dacă kajaiaa zyx
rrrr++= este un vector liber, atunci
222zyx aaaa ++=
r
DemonstraŃie: Dacă 0rr
=a , atunci evident 2220 zyx aaaa ++==r
.
Dacă 0rr
≠a , atunci din DefiniŃia 4.2 obŃinem 2
aaarrr
=⋅ , iar din Teorema 4.6
avem 222zyx aaaaa ++=⋅
rr, de unde găsim 222
zyx aaaa ++=r
.

18
ExerciŃiul 1: Să se determine scalarul λ astfel încât vectorii
kjiarrrr
λλ +++= )3( şi kjibrrrr
−−= 37λ să fie perpendiculari.
SoluŃie: Aşa cum s-a văzut anterior, perpendicularitatea vectorilor ar
şi br
este
echivalentă cu egalitatea 0=⋅barr
. Utilizând expresia analitică a produsului scalar, obŃinem că 0)3(37 =−+− λλλ , de unde 3=λ .
ExerciŃiul 2: Dacă 3, Vba ∈rr
astfel încât 3=ar
, br
=2, iar unghiul dintre cei
doi vectori este 3
π, să se determine unghiul dintre diagonalele paralelogramului
construit pe cei doi vectori.
fig. 21
SoluŃie: Deoarece la acest moment avem o formulă de calcul numai pentru
unghiul dintre doi vectori, este natural să dăm semnificaŃie de vectori celor două
diagonale: barr
+ , respectiv barr
− (vezi fig. 21). Pentru determinarea unghiului format de aceşti doi vectori, folosim:
cosbaba
babababa rrrr
rrrrrrrr
−+
−⋅+=−+
)()(),(
Dar 5)()(22
=−=−⋅+ bababarrrrrr
. De asemenea,
1942
123292)()(
222
=+⋅⋅⋅+=+⋅+=+⋅+=+ bbaabababarrrrrrrrrr
, de unde
19=+ barr
. Similar găsim 7=− barr
. În final obŃinem:
cos133
5),( =−+ babarrrr
.
ExerciŃiul 3: Se consideră vectorii kjiOArrr
22 −+= şi kiOBrr
43 += . Să se
determine versorul bisectoarei unghiului ),( OBOA . SoluŃie: Determinăm mai întâi versorii corespunzători celor doi vectori daŃi:
3441 =++=OA şi 5169 =+=OB , deci )22(3
1kjiarrrr
−+= şi
br
ar

19
)43(5
1kibrrr
+= sunt versorii vectorilor OA , resp. OB . Paralelogramul determinat de
versorii ar
şi br
este de fapt un romb, deci bisectoarea unghiului determinat de cei doi vectori coincide cu diagonala care trece prin punctul O. Dacă notăm
kjibadrrrrrr
15
2
3
2
15
14++=+= , atunci versorul bisectoarei unghiului căutat va fi :
( )kjid
dv
rrrr
rr
21014310
1++== .
ExerciŃiul 4: DemonstraŃi că într-un triunghi înălŃimile sunt concurente.
fig. 22
SoluŃie: Fie 'BB şi 'CC înălŃimile corespunzătoare laturilor AC şi respectiv
AB. Notăm '' CCBBH I= . Vom demonstra că BCAH ⊥ .
Introducem vectorii HAa =r
, HBb =r
şi HCc =r
. Rezultă că abAB −= ,
bcBCvr
−= şi caCAvv
−= . Deoarece ACBH ⊥ şi ABCH ⊥ , obŃinem că
0)( =− cabrvv
şi 0)( =− abcrvr
. Prin adunarea ultimelor două relaŃii găsim 0=− acabrrrr
,
adică 0)( =− acbrvv
, ceea ce implică BCAH ⊥ .
5. Produsul vectorial
DefiniŃia 5.1 : Fie 0\, 3
rrrVba ∈ doi vectori necoliniari. Se numeşte produs
vectorial al vectorilor ar
şi br
şi se notează cu barr
× vectorul având:
- direcŃie perpendiculară pe vectorii ar
şi br
; - sens dat de regula burghiului, adică sensul de avansare al burghiului când
se deplasează vectorul ar
peste vectorul br
;
B C
A
'B
'C
H

20
- mărime dată de formula sinbabarrrr
=× ),( barr
.
(vezi fig. 23)
Dacă ar
sau 0rr
=b , sau vectorii ar
şi br
sunt coliniari, atunci prin definiŃie
0=× barr
. ObservaŃie: Formula de calcul a mărimii produsului vectorial furnizează o
altă modalitate de determinare a unghiului dintre doi vectori nenuli:
sinba
baba rr
rrrr ×
=),(
În consecinŃă, doi vectori liberi nenuli sunt coliniari dacă şi numai dacă produsul lor vectorial este zero.
fig. 23
Interpretarea geometrică a produsului vectorial: Mărimea produsului vectorial a doi vectori nenuli si necoliniari este egală cu aria paralelogramului construit pe cei doi vectori (pentru demonstrarea acestui rezultat indicăm utilizarea
formulei ariei unui triunghi ABC ca 2
ˆsin AACAB ⋅⋅)
PropoziŃia 5.2: Produsul vectorial are proprietăŃile:
1. abbarrrr
×−=× , pentru orice 3, Vba ∈rr
;
2. )()()( bababarrrrrr
λλλ ×=×=× , pentru orice 3, Vba ∈rr
şi R∈λ ;
3. cabacbarrrrrrr
×+×=+× )( , pentru orice 3,, Vcba ∈rrr
.
DemonstraŃie: 1. Schimbând ordinea factorilor în produsul vectorial, direcŃia
şi mărimea acestuia nu se modifică. Se va schimba doar sensul. Astfel, avem că
abbarrrr
×−=× , deci produsul vectorial este anticomutativ. 2. Vom demonstra prima egalitate, pentru cea de-a doua procedându-se
analog. Dacă 0=λ , atunci fiecare termen al egalităŃii ce trebuie probată devine
vectorul nul.
ar
br
barr
×
21
Dacă λ >0, putem considera că vectorii barr
, sunt nenuli (în caz contrar, dubla
egalitate din enunŃ este evidentă). Atunci ),( barr
λ = ),( barr
şi vectorii barr
×)(λ ,
barr
× şi )( barr
×λ vor avea acelaşi sens. Pe de altă parte,
sin)( babarrrr
λλ =× ),( barr
λ sinbarr
λ= ),( barr
)( barr
×= λ ,
deci putem conchide că )()( babarrrr
×=× λλ .
Dacă λ <0, atunci ),( barr
λ = −π ),( barr
şi în plus barr
×)(λ , )( barr
×λ sunt coliniari. Mai mult,
sin)( babarrrr
λλ =× ),( barr
λ sinbarr
λ−= ),( barr
)( barr
×= λ )( barr
×= λ .
Deci şi în acest caz )()( babarrrr
×=× λλ .
3. Observăm că, dacă cel puŃin unul dintre vectorii cbarrr
,, este nul, atunci egalitatea pe care vrem să o demonstrăm este evidentă. Astfel, putem presupune că vectorii cba
rrr,, sunt toŃi nenuli.
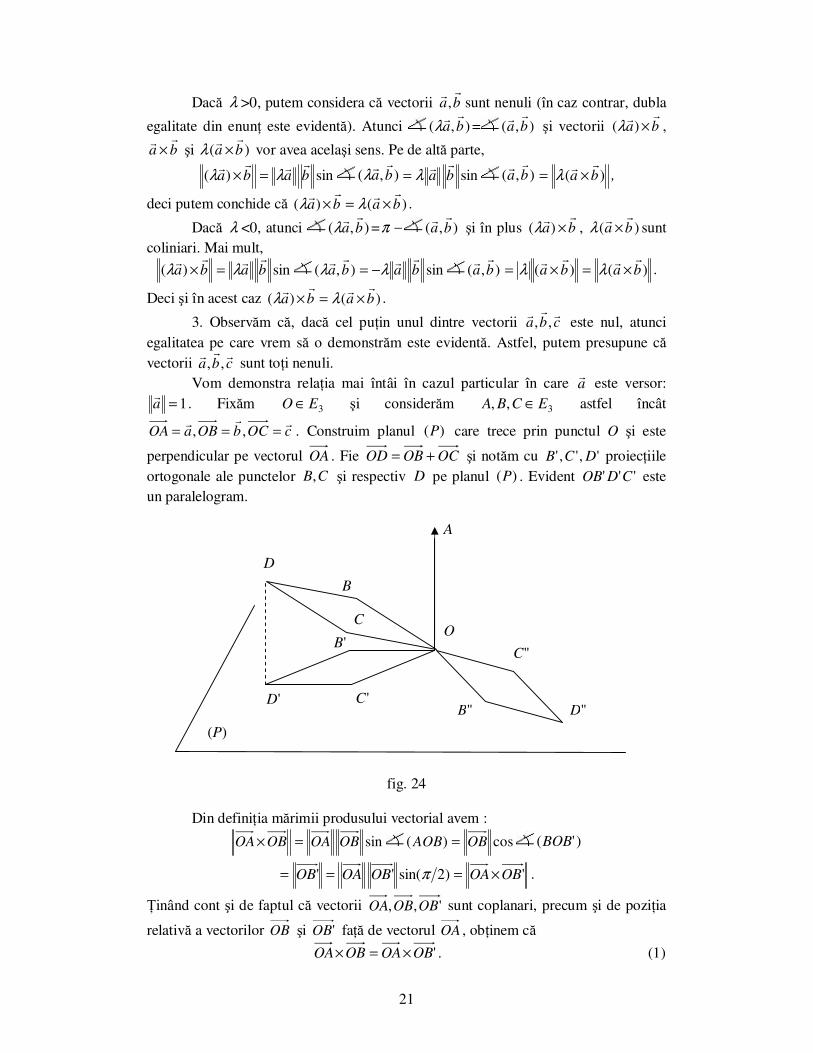
Vom demonstra relaŃia mai întâi în cazul particular în care ar
este versor: 1=a
r. Fixăm 3EO ∈ şi considerăm 3,, ECBA ∈ astfel încât
cOCbOBaOArrr
=== ,, . Construim planul )(P care trece prin punctul O şi este
perpendicular pe vectorul OA . Fie OCOBOD += şi notăm cu ',',' DCB proiecŃiile ortogonale ale punctelor CB, şi respectiv D pe planul )(P . Evident ''' CDOB este un paralelogram.
fig. 24
Din definiŃia mărimii produsului vectorial avem :
sinOBOAOBOA =× cos)( OBAOB = )'(BOB
')2sin('' OBOAOBOAOB ×=== π .
łinând cont şi de faptul că vectorii ',, OBOBOA sunt coplanari, precum şi de poziŃia
relativă a vectorilor OB şi 'OB faŃă de vectorul OA , obŃinem că
'OBOAOBOA ×=× . (1)
A
B
C
D
O
'D
'B
'C
"C
"B "D
(P)

22
Asemănător se obŃine că 'OCOAOCOA ×=× şi 'ODOAODOA ×=× . (2)
Fie 3" EB ∈ astfel încât '" OBOAOB ×= . Deoarece OAOB ⊥" , "B se află
situat în planul )(P . Cum '" OBOB ⊥ şi '" OBOB = , "OB se obŃine rotind vectorul
'OB cu unghi 2π în planul )(P (astfel ca sensul lui "OB să respecte regula
burghiului aplicată vectorilor OA şi 'OB ). Similar se obŃin în planul )(P punctele "C
şi "D din relaŃiile '" OCOAOC ×= şi respectiv '" ODOAOD ×= . În plus, """ CDOB este paralelogramul obŃinut prin rotirea paralelogramului ''' CDOB cu unghi 2π în
planul )(P . Din regula paralelogramului rezultă că """ OCOBOD += , adică
''' OCOAOBOAODOA ×+×=× . Din relaŃiile (1) şi (2), ultima egalitate este
echivalentă cu OCOAOBOAODOA ×+×=× , adică
OCOAOBOAOCOBOA ×+×=+× )( . Astfel cabacba
rrrrrrr×+×=+× )( (3)
Presupunem acum că 0\3
rrVa ∈ arbitrar şi notăm
a
av r
rr
= . Atunci evident vr
este versor şi, din relaŃia (3), cvbvcbvrrrrrrr
×+×=+× )( . Amplificând această egalitate
cu ar
şi Ńinând cont de proprietatea 2 din această propoziŃie vom obŃine afirmaŃia
dorită. Teorema 5.3 (Expresia analitică a produsului vectorial): Fie
kajaiaa zyx
rrrr++= şi kbjbibb zyx
rrrr++= doi vectori liberi, daŃi sub formă
analitică. Atunci produsul lor vectorial se calculează cu formula:
zyx
zyx
bbb
aaa
kji
ba
rrr
rr=× .
DemonstraŃie: Determinăm mai întâi valorile produsului vectorial pe mulŃimea versorilor ,, kji
rrr. De exemplu, din DefiniŃia 5.1 şi din orientarea
versorilor (vezi fig. 25), obŃinem: 0=× ii
rr şi kji
rrr=× .
RaŃionând astfel, rezultatele produsului vectorial pe mulŃimea versorilor axelor de coordonate pot fi date sub forma tabelului

23
Din proprietăŃile produsului vectorial şi din rezultatele tabelului precedent
obŃinem:
+×+×+×=++×++=× kibajibaiibakbjbibkajaiaba zxyxxxzyxzyx
rrrrrrrrrrrrrr)()(
−=×+×+×+×+×+× kbakkbajkbaikbakjbajjbaijba yxzzyzxzzyyyxy
rrrrrrrrrrrrr
ibajbaibakbajba yzxzzyxyzx
rrrrr−++− .
Pe de altă parte:
jbaibakbakbajbaiba
bbb
aaa
kji
zxyzxyyxxzzy
zyx
zyx
rrrrrr
rrr
−−−++= .
Comparând aceste două relaŃii, obŃinem formula dorită.
ExerciŃiul 1: StudiaŃi coliniaritatea punctelor: A(-1,3,2), B(0,4,1) şi C(2,6,-1). SoluŃie:Punctele A(-1,3,2), B(0,4,1) şi C(2,6,-1) sunt coliniare dacă şi numai
dacă vectorii kjiABrrr
−+= şi kjiACrrr
333 −+= sunt coliniari, adică 0r
=× ACAB .
Dar 0
333
111r
rrr
=
−
−=×
kji
ACAB , deci cele trei puncte sunt coliniare.
ExerciŃiul 2: Se consideră punctele A(1,0,2), B(3,2,-2) şi C(0,-1,2). Să se
determine aria triunghiului ABC precum şi lungimea înălŃimii din B.
SoluŃie:Vectorii AB şi AC au expresiile analitice kjiABrrr
422 −+= şi
jiACrr
−−= . Folosind expresia analitică a produsului vectorial, obŃinem:
ji
kji
ACABrr
rrr
44
011
422 +−=
−−
−=× ,
de unde găsim aria triunghiului 222
1=×= ACABS ABC .
Pe de altă parte, lungimea înălŃimii din B este 42
==AC
Sh ABC
b .

24
6. Produsul mixt
DefiniŃia 6.1: Fie 3,, Vcba ∈rrr
. Se numeşte produs mixt al vectorilor cbarrr
,, şi
se notează cu ),,( cbarrr
scalarul dat de relaŃia:
)(),,( cbacbarrrrrr
×⋅=
Teorema 6.2 (Expresia analitică a produsului mixt): Fie
kajaiaa zyx
rrrr++= , kbjbibb zyx
rrrr++= şi kcjcicc zyx
rrrr++= trei vectori liberi,
daŃi sub formă analitică. Atunci produsul mixt al celor trei vectori se poate calcula prin formula:
zyx
zyx
zyx
ccc
bbb
aaa
cba =),,(rrr
DemonstraŃie: Din expresia analitică a produsului vectorial obŃinem că:
kcc
bbj
cc
bbi
cc
bb
ccc
bbb
kji
cbyx
yx
zx
zx
zy
zy
zyx
zyx
rrr
rrr
rr+−==× .
Folosind acum definiŃia produsului mixt şi expresia analitică a produsului scalar, rezultă că:
zyx
zyx
zyx
yx
yxz
zx
zxy
zy
zyx
ccc
bbb
aaa
cc
bba
cc
bba
cc
bbacbacba =+−=×⋅= )(),,(
rrrrrr
(ultima egalitate, privită de la dreapta la stânga, reprezintă dezvoltarea după prima linie a determinantului de ordinul trei).
PropoziŃia 6.3: Produsul mixt are proprietăŃile:
1. ),,(),,(),,( bacacbcbarrrrrrrrr
== , pentru orice 3,, Vcba ∈rrr
;
2. ),,(),,(),,(),,( abcbcacabcbarrrrrrrrrrrr
−=−=−= , pentru orice 3,, Vcba ∈rrr
;
3. ),,(),,(),,( 2121 cbacbacbaarrrrrrrrrr
+=+ , pentru orice 321 ,,, Vcbaa ∈rrrr
;
4. ),,(),,( cbacbarrrrrr
λλ = , pentru orice 3,, Vcba ∈rrr
şi R∈λ .
DemonstraŃie: Aceste proprietăŃi se verifică imediat dacă se Ńine cont de
expresia analitică a produsului mixt, precum şi de proprietăŃile determinanŃilor. ObservaŃie: ProprietăŃile 1. şi 2. pot fi sintetizate astfel: la aplicarea unei
permutări de ordin 3 termenilor unui produs mixt se schimbă semnul dacă şi numai dacă permutarea este impară.

25
Interpretarea geometrică a produsului mixt: Modulul produsului mixt
),,( cbarrr
este egal cu volumul paralelipipedului construit pe cei trei vectori.
Într-adevăr, volumul paralelipipedului este dat de produsul dintre aria bazei Ab
şi înălŃimea paralelipipedului h. Dar aria bazei Ab este cbrr
× (vezi interpretarea
geometrică a produsului vectorial), iar unghiul ϕ dintre vectorii ar
şi cbrr
× coincide
cu unghiul dintre vectorul ar
şi înălŃimea h, deci =ϕcosar
h. ObŃinem astfel:
=×= ϕcos),,( cbacbarrrrrr
Abh, deci concluzia dorită.
fig. 26
Corolar 6.4: Trei vectori liberi cba
rrr,, sunt coplanari dacă şi numai dacă
produsul lor mixt este zero.
DemonstraŃie: Putem presupune, fără a reduce generalitatea, că cbarrr
,, sunt vectori nenuli şi oricare doi sunt necoliniari (în cazul contrar echivalenŃa din enunŃ fiind clară).
Dacă cbarrr
,, sunt vectori coplanari, în ipoteza de lucru formulată anterior, din
Teorema 2.6 rezultă că există scalarii βα , astfel încât bacrrr
βα += . Astfel, ultima
linie a determinantului care reprezintă expresia analitică a produsului mixt ),,( cbarrr
va fi o combinaŃie liniară a primelor două linii şi în consecinŃă acest determinant va fi
zero. Deci 0),,( =cbarrr
. Reciproc, dacă produsul mixt este zero, atunci volumul paralelipipedului
construit pe cei trei vectori este zero (vezi fig. 26). Vectorii br
şi cr
fiind necoliniari, aria bazei Ab este nenulă şi astfel rezultă că înălŃimea h a paralelipipedului trebuie să fie zero. Acest lucru se întâmplă dacă şi numai dacă punctul A este în planul bazei, adică cba
rrr,, sunt vectori coplanari.
AplicaŃie importantă: Calculul volumului unui tetraedru

26
Volumul tetraedrului OABC este: 6
),,(
32
3
cbahcb
hAV OBC
OABC
rrr
rr
=⋅
×
=⋅
= ∆ .
ExerciŃiul 1: Se consideră punctele )7,2,0(),1,1,3(),2,0,1( CBA − . Să se
determine un punct D pe axa Ox astfel încât volumul tetredrului ABCD sa fie 7. AflaŃi apoi lungimea înălŃimii coborâte din vârful D pe faŃa (ABC) a tetraedrului.
SoluŃie: Vârful căutat D fiind pe axa Ox, va avea coordonate de forma
)0,0,(αD , cu R∈α . Atunci vectorii ADACAB ,, au expresiile analitice:
kjiABrrr
−−= 2 , kjiACrrr
52 ++−= şi respectiv kiADrr
2)1( −−= α .
Rezultă că 33
201
521
112
),,( −−=
−−
−
−−
= α
α
ADACAB , de unde obŃinem că volumul
tetraedrului ABCD este 2
1
6
33 +=
−−=
ααABCDV . Punând condiŃia ca acest volum
să fie 7 găsim 151 −=α şi 132 =α . Deci există două puncte )0,0,15(1 −D şi
)0,0,13(2D care satisfac cerinŃele exerciŃiului. Dacă notăm cu h lungimea înălŃimii coborâte din vârful D pe faŃa (ABC) a
tetraedrului, atunci ABC
ABCD
A
Vh
3= , unde ABCA reprezintă aria triunghiului ABC.
Deoarece
kji
kji
ACABrrr
rrr
393
521
112 +−−=
−
−−=× , iar 2
113
2
1=×= ACABAABC , obŃinem
11
14=h .
7. ExerciŃii
1. Fie ABC un triunghi oarecare, G centrul său de greutate şi ',',' CBA
mijloacele laturilor BC, CA şi respectiv AB. Să se arate că:
i) 0'''r
=++ CCBBAA ;
ii) G este unicul punct din spaŃiu care satisface relaŃia 0r
=++ GCGBGA ; iii) centrul de greutate al triunghiului ''' CBA coincide cu centrul de greutate G
al triunghiului ABC. 2. Pe un cerc cu centrul în punctul O se consideră trei puncte A, B, C. Să se
arate că triunghiul ABC este echilateral dacă şi numai dacă 0r
=++ OCOBOA .
27
3. Fie ABC un triunghi şi O centrul cercului circumscris triunghiului. Să se
arate că triunghiul ABC este echilateral dacă şi numai dacă AOACAB 3=+ . 4. Într-un cerc de centru O se consideră două coarde perpendiculare AB şi CD
care se intersectează în punctul P. Să se demonstreze că:
POPDPCPBPA 2=+++ . 5. Să se arate, cu ajutorul calculului vectorial, că diagonalele unui romb sunt
perpendiculare. 6. Fie ABCD un patrulater şi O punctul de intersecŃie al diagonalelor. i) Să se arate că ABCD este trapez dacă şi numai dacă punctul O aparŃine unuia
dintre segmentele care uneşte mijloacele a două laturi opuse ale patrulaterului; ii) Să se arate că ABCD este paralelogram dacă şi numai dacă punctul O
aparŃine fiecăruia dintre segmentele care uneşte mijloacele laturilor opuse ale patrulaterului.
7. Fie ABCD un patrulater şi O punctul de intersecŃie al diagonalelor. Să se
arate că ABCD este paralelogram dacă şi numai dacă MOMDMCMBMA 4=+++ , oricare ar fi punctul M din spaŃiu.
8. i) Fie 3,,, EMCBA ∈ puncte arbitrare. Să se demonstreze că are loc relaŃia:
0=⋅+⋅+⋅ ABCMCABMBCAM . ii) Să se demonstreze că dacă într-un tetraedru două perechi de muchii opuse
sunt ortogonale, atunci şi cea de-a treia pereche are aceeaşi proprietate. 9. Fie ABC un triunghi şi O un punct arbitrar în spaŃiu. Să se demonstreze
relaŃia:
)(2 OAOCOCOBOBOAOCABOBCAOABC ×+×+×=×+×+× . 10. Fie γβα ,, unghiurile pe care le formează un vector liber nenul cu axele
de coordonate. Să se arate că 1coscoscos 222 =++ γβα . (Remarcă: γβα cos,cos,cos se numesc cosinuşii directori ai vectorului.)
11. Dacă 3,, Vcba ∈rrr
astfel încât 0rrrr
=++ cba , să se arate că
accbbarrrrrr
×=×=× . Reciproc este adevărat? 12. Să se demonstreze, cu ajutorul calculului vectorial, că în orice triunghi
ABC are loc relaŃia C
c
B
b
A
a
sinsinsin== (teorema sinusului). (IndicaŃie: Se poate
utiliza exerciŃiul 11.) 13. Se consideră punctele ),0,0(),0,,0(),0,0,( cCbBaA . Să se arate că aria
triunghiului ABC este cel mult egală cu 444
2
1cba ++ . În ce caz are loc

28
egalitatea?
14. Să se arate că vectorii vuarrr
+= 3 şi vubrrr
+−= sunt coliniari dacă şi numai dacă vectorii u
r şi v
r sunt coliniari.
15. Fie kjiarrrr
22 +−= şi jibrrr
+= . Să se determine:
i) unghiul dintre vectorii ar
şi br
;
ii) aria paralelogramului construit pe vectorii ar
şi br
16. Să se determine R∈λ astfel încât vectorii
kjiarrrr
)4(23 −++= λλ şi kjibrrrr
3+−= λ să fie perpendiculari.
17. Să se determine calculeze expresia accbbaErrrrrr
++= , cunoscând că
kjicbarrrrrr
++=++ şi 2=== cbarrr
.
18. Se consideră vectorii liberi cbarrr
,, cu proprietăŃile: 2,1,3 === cbarrr
şi
3),(
π=ba
rr,
6),(
π=ca
rr,
4),(
π=cb
rr. Să se calculeze cba
rrr2−+ .
19. Să se arate că vectorii
kjiarrrr
32 −+= , kjibrrrr
−+= 44 , kicrrr
52 += sunt coplanari.
20. Să se determine R∈λ astfel încât vectorii
kjiarrrr
32)2( +++= λ , kjibrrrr
−+= λ , kicrrr
24 +=
să fie coplanari şi să se descompună apoi vectorul ar
după direcŃiile vectorilor br
şi cr
. 21. Să se demonstreze că
),,(4
1
2,
2,
2cba
accbba rrrrrrrrr
=
+++,
oricare ar fi 3,, Vcba ∈rrr
.
22. Fie punctele )7,4,2(),5,5,3(),4,4,4(),1,1,1( DCBA . Să se determine: i) Volumul tetraedrului ABCD; ii) Lungimea înălŃimii coborâte din vârful A pe faŃa (BCD). 23. Se consideră vectorii wvu
rrr,, necoplanari cu ajutorul cărora se definesc
wvuarrrr
32 +−= , wvubrrrr
+−= λ , wvucrrrr
−+= 3 . Să se determine scalarul λ astfel încât volumul tetraedrului determinat de
vectorii cbarrr
,, să fie de cinci ori volumul tetraedrului determinat de vectorii wvurrr
,, .

29
Capitolul II
Planul şi dreapta în spaŃiu
Pe parcursul acestui capitol ne vom raporta la sistemul ortogonal de coordonate Oxyz introdus în secŃiunea 3 a capitolului precedent. De asemenea, noŃiunile introduse şi rezultatele obŃinute în capitolul Vectori liberi vor fi instrumente deosebit de utile pentru studiul planelor şi dreptelor din spaŃiu.
1. Planul
Teorema 1.1 (EcuaŃia planului ce trece printr-un punct dat şi este
perpendicular pe o direcŃie dată): Dacă ),,( 0000 zyxM este un punct fix în spaŃiu, iar
kCjBiAnrrrr
++= un vector nenul dat, atunci ecuaŃia planului ce trece prin 0M şi
este perpendicular pe vectorul nr
are forma: 0)()()( 000 =−+−+− zzCyyBxxA . (1)
fig. 27
DemonstraŃie: Fie )(P planul căutat şi considerăm ),,( zyxM un punct
arbitrar în planul )(P , diferit de punctul 0M . ApartenenŃa punctului M la planul )(P
(P)
nr
0M
M
30
este echivalentă cu perpendicularitatea vectorilor nr
şi MM 0 , deci cu relaŃia
00 =⋅ MMnr
. Deoarece kzzjyyixxMMrrr
)()()( 0000 −+−+−= , Ńinând cont de
expresia analitică a produsului scalar obŃinem că 0)()()( 000 =−+−+− zzCyyBxxA .
Aşadar, un punct ),,( zyxM aparŃine planului )(P dacă şi numai dacă
0)()()( 000 =−+−+− zzCyyBxxA . DefiniŃia 1.2: Orice vector perpendicular pe un plan dat se numeşte vector
normal la planul respectiv. ObservaŃie: Din demonstraŃia Teoremei 1.1 reiese că, dat fiind un plan de
ecuaŃie 0=+++ DCzByAx , atunci kCjBiAnrrrr
++= este un vector normal la
planul considerat. Teorema 1.3 (EcuaŃia generală a planului): Orice plan din spaŃiu este definit
de o ecuaŃie de forma: 0=+++ DCzByAx , (2)
cu DCBA ,,, anumite constante reale astfel ca .0222 ≠++ CBA
DemonstraŃie: Fie )(P un plan arbitrar. Alegând ),,( 0000 zyxM un punct în
planul )(P şi kCjBiAnrrrr
++= un vector normal la planul )(P , conform Teoremei
1.1 obŃinem că ecuaŃia planului )(P este 0)()()( 000 =−+−+− zzCyyBxxA , adică 0=+++ DCzByAx , unde s-a notat .000 CzByAxD −−−= Datorită faptului că un
vector normal la un plan este nenul, obŃinem condiŃia adiŃională .0222 ≠++ CBA Teorema 1.4: Orice ecuaŃie de gradul întâi în x,y,z defineşte un plan din
spaŃiu.
DemonstraŃie: O ecuaŃie de gradul întâi în x, y, z este de forma 0=+++ DCzByAx (3)
cu DCBA ,,, constante reale date şi 0222 ≠++ CBA (pentru ca ecuaŃia să fie de gradul întâi). O astfel de ecuaŃie are o infinitate de soluŃii reale (se dau valori arbitrare la două dintre necunoscute şi se determină cea de-a treia necunoscută). Fie
),,( 000 zyx o soluŃie a acestei ecuaŃii. Evident tripletul de numere reale ),,( 000 zyx
corespunde punctului ),,( 000 zyxM din spaŃiu şi
0000 =+++ DCzByAx (4)
Scăzând relaŃia (4) din relaŃia (3) obŃinem că 0)()()( 000 =+−+−+− DzzCyyBxxA (5)
EcuaŃiile (3) şi (5) sunt echivalente (se poate obŃine ecuaŃia (5) din (3) - aşa cum am văzut mai sus – şi invers putem ajunge la ecuaŃia (3) pornind de la (5), tot cu ajutorul relaŃiei (4)). Pe de altă parte, după cum rezultă din Teorema 1.1, ecuaŃia (5) defineşte un plan (planul ce trece prin punctul ),,( 000 zyxM şi este perpendicular pe
vectorul kCjBiAnrrrr
++= ). Deci şi ecuaŃia (3) va reprezenta un plan din spaŃiu.
31
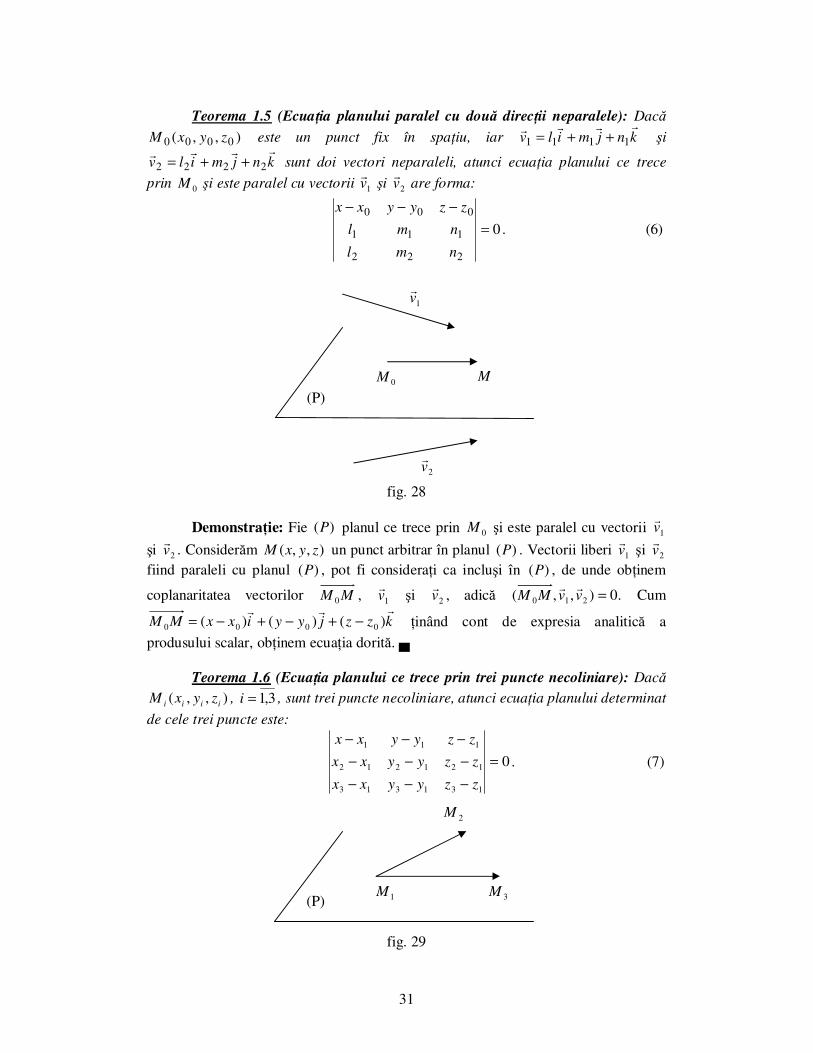
Teorema 1.5 (EcuaŃia planului paralel cu două direcŃii neparalele): Dacă
),,( 0000 zyxM este un punct fix în spaŃiu, iar knjmilvrrrr
1111 ++= şi
knjmilvrrrr
2222 ++= sunt doi vectori neparaleli, atunci ecuaŃia planului ce trece
prin 0M şi este paralel cu vectorii 1vr
şi 2vr
are forma:
0
222
111
000
=
−−−
nml
nml
zzyyxx
. (6)
fig. 28
DemonstraŃie: Fie )(P planul ce trece prin 0M şi este paralel cu vectorii 1v
r
şi 2vr
. Considerăm ),,( zyxM un punct arbitrar în planul )(P . Vectorii liberi 1vr
şi 2vr
fiind paraleli cu planul )(P , pot fi consideraŃi ca incluşi în )(P , de unde obŃinem
coplanaritatea vectorilor MM 0 , 1vr
şi 2vr
, adică .0),,( 210 =vvMMrr
Cum
kzzjyyixxMMrrr
)()()( 0000 −+−+−= Ńinând cont de expresia analitică a
produsului scalar, obŃinem ecuaŃia dorită.
Teorema 1.6 (EcuaŃia planului ce trece prin trei puncte necoliniare): Dacă
),,( iiii zyxM , 3,1=i , sunt trei puncte necoliniare, atunci ecuaŃia planului determinat
de cele trei puncte este:
0
131313
121212
111
=
−−−
−−−
−−−
zzyyxx
zzyyxx
zzyyxx
. (7)
fig. 29
(P) 1M
2M
3M
(P)
1vr
0M M
2vr

32
DemonstraŃie: Aşa cum se ştie, din axiomele de incidenŃă ale spaŃiului şi consecinŃele lor, trei puncte necoliniare determină un plan şi numai unul. Fie )(P
planul ce trece prin punctele ),,( iiii zyxM , 3,1=i .
Dacă notăm 211 MMv =r
şi 312 MMv =r
, este clar că vectorii 1vr
şi 2vr
sunt
incluşi în planul )(P , deci paraleli cu planul )(P , iar punctul 1M aparŃine planului )(P . Putem astfel aplica Teorema 1.5. Având în vedere că
kzzjyyixxMMrrr
)()()( 12121221 −+−+−= ,
kzzjyyixxMMrrr
)()()( 13131331 −+−+−= ,
relaŃia (6) conduce la ecuaŃia dorită.
Corolar 1.7 (EcuaŃia planului prin tăieturi): Planul care intersectează axele sistemului cartezian ortogonal în punctele )0,,0(),0,0,( bBaA şi respectiv ),0,0( cC (diferite de originea O a sistemului cartezian) are ecuaŃia
01 =−++c
z
b
y
a
x (8)
fig. 30
DemonstraŃie: Evident, punctele A,B,C sunt necoliniare. Conform Teoremei
1.6, ecuaŃia planului determinat de punctele A,B,C este:
0
0
0 =
−
−
−
ca
ba
zyax
.
Dezvoltând acest determinant după prima linie obŃinem 0)( =++− abzacyaxbc .
Dacă se împarte relaŃia precedentă prin abc , obŃinem ecuaŃia (8).
ObservaŃie: Teoremele 1.1, 1.5, 1.6 precum şi Corolarul 1.7 prezintă situaŃii favorabile determinării ecuaŃiei unui plan în spaŃiu. Într-o problemă de geometrie analitică având drept concluzie determinarea ecuaŃiei unui anumit plan, se va reduce
O
z
y
x
A
B
C

33
situaŃia prezentată în problemă la unul din rezultatele teoretice menŃionate anterior şi se foloseşte ecuaŃia corespunzătoare.
ExerciŃiul 1: Să se determine ecuaŃia planului de coordonate (xOy). SoluŃia 1: Planul de coordonate (xOy) trece prin originea )0,0,0(O şi este
perpendicular pe versorul kr
. Astfel, din Teorema 1.1, ecuaŃia planului de coordonate (xOy) este 0)0(1)0(0)0(0 =−+−+− zyx , adică 0=z .
SoluŃia 2: Planul de coordonate (xOy) trece prin originea )0,0,0(O şi este
paralel cu versorii ir
şi jr
(de fapt cei doi versori sunt incluşi – caz particular de paralelism – în planul (xOy)). Din Teorema 1.5 ecuaŃia planului de coordonate (xOy) este
0
010
001
000
=
−−− zyx
,
deci 0=z .
SoluŃia 3: Vom folosi că planul de coordonate (xOy) trece prin originea )0,0,0(O şi prin punctele )0,0,1(A şi )1,0,0(B . Astfel, din Teorema 1.6, ecuaŃia
planului căutat este
0
000100
000001
000
=
−−−
−−−
−−− zyx
,
adică 0=z .
ExerciŃiul 2: Să se determine ecuaŃia planului ştiind că punctul )3,0,1(M este piciorul perpendicularei coborâte din origine pe plan.
SoluŃie: Din ipoteză, kiOMrr
3+= este vector normal pentru planul căutat, iar punctul )3,0,1(M aparŃine acestui plan. Putem aplica Teorema 1.1 şi vom obŃine ecuaŃia 0)3(3)0(0)1(1 =−+−+− zyx , adică 0103 =−+ zx .
2. Dreapta
DefiniŃia 2.1: Fie (d) o dreaptă dată din spaŃiu. Se numeşte vector director al
dreptei (d) orice vector având direcŃia paralelă cu dreapta (d). Dacă knjmilvrrrr
++= este un vector director al dreptei (d), atunci l, m, n se numesc parametri directori ai dreptei.
34
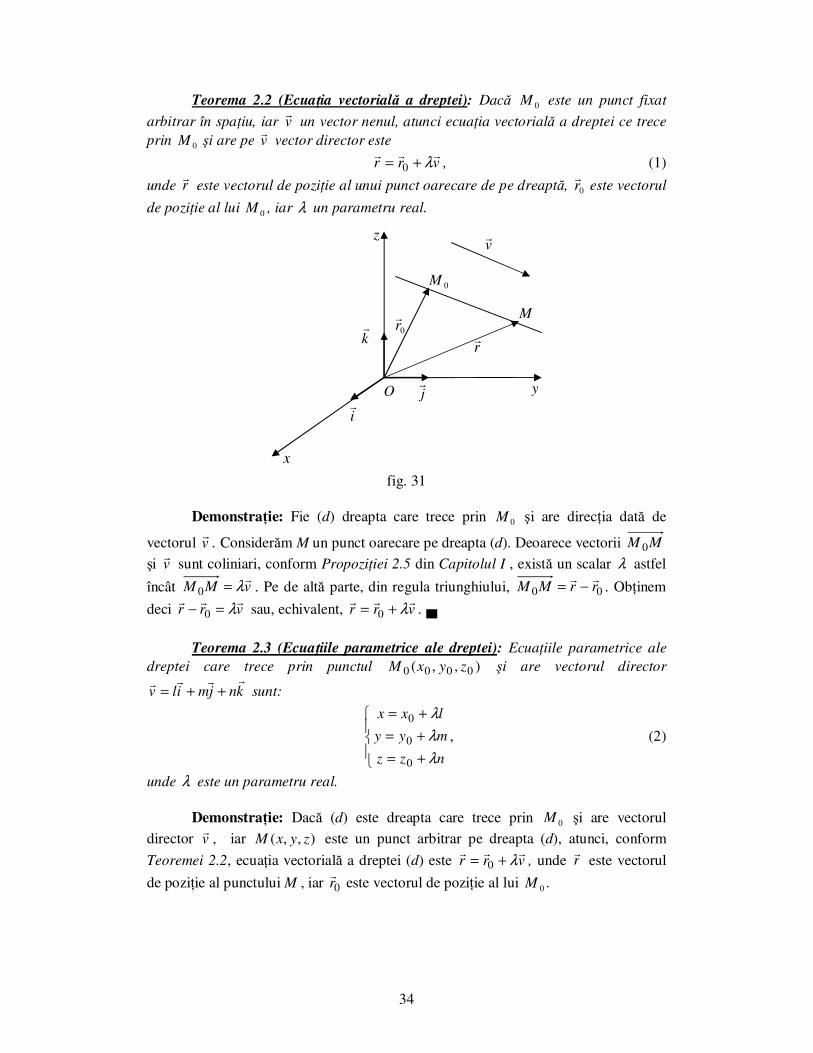
Teorema 2.2 (EcuaŃia vectorială a dreptei): Dacă 0M este un punct fixat
arbitrar în spaŃiu, iar vr
un vector nenul, atunci ecuaŃia vectorială a dreptei ce trece prin 0M şi are pe v
r vector director este
vrrrrr
λ+= 0 , (1)
unde rr
este vectorul de poziŃie al unui punct oarecare de pe dreaptă, 0rr
este vectorul
de poziŃie al lui 0M , iar λ un parametru real.
fig. 31
DemonstraŃie: Fie (d) dreapta care trece prin 0M şi are direcŃia dată de
vectorul vr
. Considerăm M un punct oarecare pe dreapta (d). Deoarece vectorii MM 0
şi vr
sunt coliniari, conform PropoziŃiei 2.5 din Capitolul I , există un scalar λ astfel
încât vMMr
λ=0 . Pe de altă parte, din regula triunghiului, 00 rrMMrr
−= . ObŃinem
deci vrrrrr
λ=− 0 sau, echivalent, vrrrrr
λ+= 0 .
Teorema 2.3 (EcuaŃiile parametrice ale dreptei): EcuaŃiile parametrice ale
dreptei care trece prin punctul ),,( 0000 zyxM şi are vectorul director
knjmilvrrrr
++= sunt:
+=
+=
+=
nzz
myy
lxx
λ
λ
λ
0
0
0
, (2)
unde λ este un parametru real.
DemonstraŃie: Dacă (d) este dreapta care trece prin 0M şi are vectorul
director vr
, iar ),,( zyxM este un punct arbitrar pe dreapta (d), atunci, conform
Teoremei 2.2, ecuaŃia vectorială a dreptei (d) este vrrrrr
λ+= 0 , unde rr
este vectorul
de poziŃie al punctului M , iar 0rr
este vectorul de poziŃie al lui 0M .
O
z
y
x
M
0M
0rr
rr
vr
ir
jr
kr

35
fig. 32
łinând cont de expresiile analitice ale vectorilor 0,rr
rr şi respectiv v
r ,
obŃinem că
)(000 knjmilkzjyixkzjyixrrrrrrrrr
+++++=++ λ ,
adică knzjmyilxkzjyixrrrrrr
)()()( 000 λλλ +++++=++ . Folosind unicitatea
descompunerii unui vector după trei vectori necoplanari, rezultă că
+=
+=
+=
nzz
myy
lxx
λ
λ
λ
0
0
0
.
Teorema 2.4 (EcuaŃiile canonice ale dreptei): EcuaŃiile canonice ale dreptei
care trece prin punctul ),,( 0000 zyxM şi are vectorul director knjmilvrrrr
++= sunt:
n
zz
m
yy
l
xx 000 −=
−=
−. (3)
DemonstraŃie: Din Teorema 2.3, ecuaŃiile parametrice ale dreptei care trece
prin punctul ),,( 0000 zyxM şi are vectorul director knjmilvrrrr
++= sunt date de
sistemul (2). Explicitând λ din fiecare dintre cele trei ecuaŃii ale sistemului se obŃine şirul de trei rapoarte egale din relaŃia (3).
ObservaŃie: Vom conveni să scriem ecuaŃiile unei drepte sub forma (3) şi în
cazul când unul sau doi dintre parametrii directori l, m, n sunt nuli, înŃelegând în acest caz că dacă unul dintre numitorii ecuaŃiilor (3) este zero, atunci şi numărătorul corespunzător este zero.
Teorema 2.5 (EcuaŃiile dreptei care trece prin două puncte date): Dacă
),,( 1111 zyxM şi ),,( 2222 zyxM sunt două puncte distincte din spaŃiu, atunci ecuaŃiile dreptei care trece prin cele două puncte sunt:
12
1
12
1
12
1
zz
zz
yy
yy
xx
xx
−
−=
−
−=
−
−. (4)
DemonstraŃie: Dacă notăm 21MMv =r
, este clar că vr
reprezintă un vector
director al dreptei deteminate de punctele 1M şi 2M . łinând cont că
kzzjyyixxMMrrr
)()()( 12121221 −+−+−= , din Teorema 2.4 se obŃine imediat relaŃia dorită.
M
0M
0rr
rr
vr
(d) O

36
Din geometria euclidiană se ştie că două plane neparalele se intersectează după o dreaptă. Fie 0:)( 11111 =+++ DzCyBxAP şi 0:)( 22222 =+++ DzCyBxAP
două plane neparalele şi )()()( 21 PPd I= . Vectorii kCjBiAnrrrr
1111 ++= şi
kCjBiAnrrrr
2222 ++= sunt vectori normali pentru planele )( 1P şi respectiv )( 2P .
Cum cele două plane sunt neparalele, vectorii 1nr
şi 2nr
vor fi necoliniari, adică
021
rrr≠× nn . Deoarece
222
11121
CBA
CBA
kji
nn
rrr
rr=× ,
condiŃia 021
rrr≠× nn este echivalentă cu 2
222
111=
CBA
CBArang . Am obŃinut astfel
următorul rezultat:
Teorema 2.6 (EcuaŃiile dreptei ca intersecŃie de două plane): O dreaptă (d) din spaŃiu are ecuaŃii de forma
=+++
=+++
0
0
2222
1111
DzCyBxA
DzCyBxA, (5)
cu 2222
111=
CBA
CBArang .
fig. 33
ObservaŃie: Aşa cum vom vedea în paragrafele următoare, în formulele legate de unghiuri şi distanŃe la drepte intervin parametrii directori ai acestora. Astfel, devine importantă aflarea parametrilor directori ai unei drepte (d) date sub forma (5). Vom utiliza notaŃiile premergătoare Teoremei 2.6.
Avem )( 11 Pn ⊥r
şi )()( 1Pd ⊂ , de unde )(1 dn ⊥r
. Similar obŃinem )(2 dn ⊥r
. Aceste relaŃii de perpendicularitate asigură că dreapta )(d este perpendiculară pe
( 1P )
( 2P )
( d )

37
planul determinat de vectorii 1nr
şi 2nr
. Cum şi vectorul 21 nnrr
× este perpendicular pe
planul determinat de vectorii 1nr
şi 2nr
, obŃinem că 21 nnrr
× este vector director al dreptei )(d . Deoarece
kBA
BAj
CA
CAi
CB
CBnn
rrrrr
22
11
22
11
22
1121 +−=× ,
rezultă că parametrii directori ai dreptei )(d sunt:
22
11
22
11
22
11 ,,BA
BAn
CA
CAm
CB
CBl =−== (6)
ExerciŃiu: Să se determine ecuaŃiile axei de coordonate Ox. SoluŃia 1: Axa Ox trece prin originea )0,0,0(O şi are direcŃia dată de versorul
ir
. Conform Teoremei 2.4 ecuaŃiile axei Ox sunt 001
zyx== . De remarcat că aceste
ecuaŃii sunt echivalente, dintr-o observaŃie anterioară sau luând ecuaŃiile 01
yx= şi
01
zx= şi înmulŃind mezii şi extremii, cu
=
=
0
0
z
y. Aceste ultime ecuaŃii ale axei Ox
reprezintă de fapt scrierea axei ca intersecŃie a două plane: )(xOz şi )(xOy . SoluŃia 2: Vom folosi că axa Ox trece prin originea )0,0,0(O şi prin punctul
)0,0,1(A . Din Teorema 2.5 rezultă că ecuaŃiile axei Ox sunt 001
zyx== .
ObservaŃie: EcuaŃiile axei Ox sunt date de un şir de trei rapoarte egale, având
doi numitori egali cu zero. Acest şir de rapoarte egale este echivalent cu sistemul de ecuaŃii:
=
=
01
01zx
yx
, adică
=
=
0
0
z
y.
S-au obŃinut astfel ecuaŃiile axei Ox ca intersecŃie de două plane: (xOz) şi (xOy).
3. Fascicol de plane
DefiniŃia 3.1: Fie (d) o dreaptă din spaŃiu. Totalitatea planelor care conŃin dreapta (d) se numeşte fascicol de plane determinat de dreapta (d). În acest caz, dreapta (d) se numeşte axa fascicolului (vezi fig. 32).
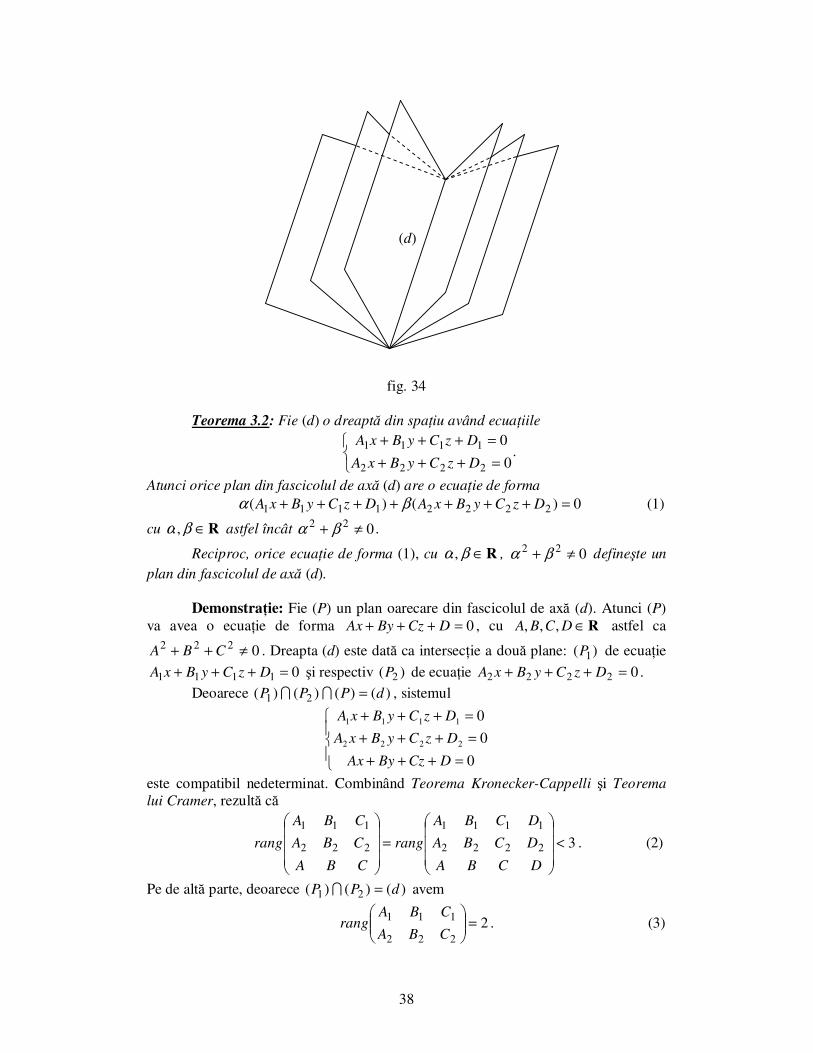
38
fig. 34 Teorema 3.2: Fie (d) o dreaptă din spaŃiu având ecuaŃiile
=+++
=+++
0
0
2222
1111
DzCyBxA
DzCyBxA.
Atunci orice plan din fascicolul de axă (d) are o ecuaŃie de forma 0)()( 22221111 =+++++++ DzCyBxADzCyBxA βα (1)
cu R∈βα , astfel încât 022 ≠+ βα .
Reciproc, orice ecuaŃie de forma (1), cu R∈βα , , 022 ≠+ βα defineşte un plan din fascicolul de axă (d).
DemonstraŃie: Fie (P) un plan oarecare din fascicolul de axă (d). Atunci (P)
va avea o ecuaŃie de forma 0=+++ DCzByAx , cu R∈DCBA ,,, astfel ca
0222 ≠++ CBA . Dreapta (d) este dată ca intersecŃie a două plane: )( 1P de ecuaŃie
01111 =+++ DzCyBxA şi respectiv )( 2P de ecuaŃie 02222 =+++ DzCyBxA .
Deoarece )()()()( 21 dPPP =II , sistemul
=+++
=+++
=+++
0
0
0
2222
1111
DCzByAx
DzCyBxA
DzCyBxA
este compatibil nedeterminat. Combinând Teorema Kronecker-Cappelli şi Teorema lui Cramer, rezultă că
32222
1111
222
111
<
=
DCBA
DCBA
DCBA
rang
CBA
CBA
CBA
rang . (2)
Pe de altă parte, deoarece )()()( 21 dPP =I avem
2222
111=
CBA
CBArang . (3)
(d)

39
Din relaŃiile (2) şi (3) obŃinem că matricea
DCBA
DCBA
DCBA
2222
1111
are rangul 2, deci
ultima linie a matricei este o combinaŃie liniară a primelor două. Aşadar există R∈βα , astfel încât
)()()( 22221111 DCBADCBADCBA βα += sau, echivalent
)()( 22221111 DzCyBxADzCyBxADCzByAx +++++++=+++ βα .
CondiŃia 022 ≠+ βα este evidentă deoarece 0222 ≠++ CBA . Reciproc, ecuaŃia (1) se poate scrie sub forma
0)()()()( 21212121 =+++++++ DDzCCyBBxAA βαβαβαβα . (4)
CoeficienŃii 212121 ,, CCBBAA βαβαβα +++ nu se pot anula simultan (în caz
contrar, deoarece 022 ≠+ βα , obŃinem şirul de rapoarte egale 2
1
2
1
2
1
C
C
B
B
A
A== , ceea
ce contrazice )()()( 21 dPP =I ). Deci ecuaŃia (4) este o ecuaŃie de gradul întâi şi reprezintă, conform Teoremei 1.4, un plan. Pe de altă parte, coordonatele punctelor de pe dreapta (d) verifică atât ecuaŃia planului )( 1P cât şi a lui )( 2P , deci verifică şi ecuaŃia (1). Astfel planul dat de ecuaŃia (1) conŃine dreapta (d).
ExerciŃiu: Să se determine ecuaŃia planului care trece prin punctul )3,0,1(M şi
conŃine dreapta .13
1
2
1:)(
−=
+=
− zyxd
SoluŃie: Fie (P) planul căutat. Deoarece (P) conŃine dreapta (d), planul face
parte din fascicolul de axă (d). Pentru a putea aplica Teorema 3.2 este necesar să scriem dreapta (d) ca intersecŃie a două plane. Pornind de la ecuaŃiile canonice ale lui
(d) obŃinem
−=
−
+=
−
12
13
1
2
1
zx
yx
sau echivalent
=−+
=−−
012
0523
zx
yx. Atunci planul (P) va avea
o ecuaŃie de forma 0)12()523( =−++−− zxyx βα , adică
0522)3( =−−+−+ βαβαβα zyx , cu R∈βα , astfel încât 022 ≠+ βα . Din apartenenŃa punctului M la planul (P) rezultă că
0563 =−−++ βαββα , deci βα 3= . Înlocuind în ecuaŃia planului (P) obŃinem 0162610:)( =−+− ββββ zyxP . Cum 0≠β (în caz contrar, dacă 0=β rezultă că
şi 0=α ceea ce contrazice condiŃia 022 ≠+ βα ), putem împărŃi ecuaŃia planului (P) prin β2 , de unde rezultă că 0835:)( =−+− zyxP .

40
4. Unghiuri în spaŃiu
În geometria euclidiană prin unghi dintre două plane se înŃelege unghiul diedru al planelor.
DefiniŃia 4.1: Unghiul dintre două plane )( 1P şi )( 2P , notat ))(),(( 21 PP ,
este unghiul format de doi vectori normali ai celor două plane.
fig. 35
ObservaŃie: Unghiul dintre două plane, definit anterior, este egal sau suplementar unghiului diedru (acest lucru depinzând de sensurile vectorilor normali).
Teorema 4.2 (Unghiul dintre două plane): Fie
0:)( 11111 =+++ DzCyBxAP şi 0:)( 22222 =+++ DzCyBxAP două plane din spaŃiu. Atunci
cos22
22
22
21
21
21
21212121 ))(),((
CBACBA
CCBBAAPP
++++
++= . (1)
DemonstraŃie: Fie kCjBiAnrrrr
1111 ++= şi kCjBiAnrrrr
2222 ++= . Atunci 1nr
şi 2nr
sunt vectori normali pentru planele )( 1P şi respectiv )( 2P şi în plus, din
DefiniŃia 4.1, =))(),(( 21 PP ),( 21 nnrr
. Dar
cos22
22
22
21
21
21
212121
21
2121 ),(
CBACBA
CCBBAA
nn
nnnn
++++
++== rr
rrrr
,
de unde se obŃine rezultatul dorit.
( 1P )
( 2P )
1nr
2nr

41
Cazuri particulare importante:
1. )()( 21 PP ⊥ dacă şi numai dacă 0212121 =++ CCBBAA (condiŃia de perpendicularitate dintre două plane).
Având în vedere că măsura unghiului dintre două plane perpendiculare este 2π şi 0)2cos( =π , din relaŃia (1) obŃinem imediat echivalenŃa dorită.
2. )()( 21 PP dacă şi numai dacă 2
1
2
1
2
1
C
C
B
B
A
A== (condiŃia de paralelism
dintre două plane). Într-adevăr, )()( 21 PP dacă şi numai dacă vectorii normali 1n
r şi 2n
r sunt
coliniari sau, echivalent, există şi este unic un scalar λ astfel încât 21 nnrr
λ= . Această
egalitate are loc dacă şi numai dacă λ===2
1
2
1
2
1
C
C
B
B
A
A.
DefiniŃia 4.3: Unghiul dintre două drepte arbitrare din spaŃiu )( 1d şi )( 2d ,
notat ))(),(( 21 dd , este unghiul format de doi vectori directori ai celor două drepte.
Teorema 4.4 (Unghiul dintre două drepte): Fie
1
1
1
1
1
11 :)(
n
zz
m
yy
l
xxd
−=
−=
− şi
2
2
2
2
2
22 :)(
n
zz
m
yy
l
xxd
−=
−=
− două drepte din
spaŃiu. Atunci
cos22
22
22
21
21
21
21212121 ))(),((
nmlnml
nnmmlldd
++++
++= . (2)
DemonstraŃie: Vectorii knjmilvrrrr
1111 ++= şi knjmilvrrrr
2222 ++= sunt
vectori directori ai dreptelor )( 1d şi )( 2d . Deoarece
cos22
22
22
21
21
21
212121
21
2121 ),(
nmlnml
nnmmll
vv
vvvv
++++
++== rr
rrrr
,
din DefiniŃia 4.3 se obŃine relaŃia (2).
Cazuri particulare importante:
1. )()( 21 dd ⊥ dacă şi numai dacă 0212121 =++ nnmmll (condiŃia de perpendicularitate dintre două drepte).
Justificarea acestei echivalenŃe este similară celei de la condiŃia de perpendicularitate a planelor.
2. )()( 21 dd dacă şi numai dacă 2
1
2
1
2
1
n
n
m
m
l
l== (condiŃia de paralelism dintre
două drepte). Într-adevăr, dreptele )( 1d şi )( 2d sunt paralele dacă şi numai dacă vectorii
directori 1vr
şi 2vr
sunt coliniari, adică 2
1
2
1
2
1
n
n
m
m
l
l== .

42
DefiniŃia 4.5: Se numeşte unghi format de dreapta (d) şi planul (P) şi se
notează ))(),(( Pd cel mai mic dintre unghiurile formate de dreapta (d) cu
proiecŃia ei pe planul (P).
fig. 36
Teorema 4.6 (Unghiul dintre o dreaptă şi un plan): Dacă (d) este o dreaptă
având ecuaŃiile n
zz
m
yy
l
xx 000 −=
−=
−, iar (P) un plan de ecuaŃie
0=+++ DCzByAx , atunci
sin222222
))(),((nmlCBA
CnBmAlPd
++++
++= . (3)
DemonstraŃie: Dacă kCjBiAnrrrr
++= şi knjmilvrrrr
++= , atunci
±=2
),(π
vnrr
))(),(( Pd . ObŃinem astfel că sin cos),( =vnrr
))(),(( Pd , de
unde, folosind formula unghiului dintre doi vectori obŃinută la produsul scalar, va rezulta relaŃia (3).
Cazuri particulare importante:
1. )()( Pd ⊥ dacă şi numai dacă n
C
m
B
l
A== (condiŃia de perpendicularitate
dintre o dreaptă şi un plan). Într-adevăr, dreapta (d) este perpendiculară pe planul (P) dacă si numai dacă
vectorul director knjmilvrrrr
++= şi vectorul normal kCjBiAnrrrr
++= sunt coliniari,
adică n
C
m
B
l
A== .
2. )()( Pd dacă şi numai dacă 0=++ CnBmAl (condiŃia de paralelism
dintre o dreptă şi un plan). Într-adevăr, )()( Pd dacă şi numai dacă măsura unghiului format de dreapta
(d) şi planul (P) este 0. Deoarece 00sin = , din relaŃia (3) se obŃine imediat afirmaŃia dorită.
nr
vr
(P)
(d)

43
ExerciŃiul 1: Să se determine ecuaŃia planului care trece prin axa Oz şi formează cu planul 0152:)( =+−+ zyxP un unghi de o60 .
SoluŃie: Fie )'(P planul căutat. EcuaŃiile axei Oz sunt
=
=
0
0
y
x. Deoarece
planul )'(P face parte din fascicolul de plane de axă Oz, )'(P are o ecuaŃie de forma
0=+ yx βα , cu R∈βα , astfel încât 022 ≠+ βα . Din Teorema 4.2 şi din ipoteză rezultă
cos2
1
)(10
2))'(),((
22=
+
+=
βα
βαPP .
ObŃinem că 06166 22 =−+ βαβα , de unde βα 3−= sau 3
βα = . Înlocuind
în ecuaŃia planului )'(P , vom găsi două plane care satisfac ipoteza exerciŃiului:
03
:)( '1 =+ y
xP şi 03:)( '
2 =+− yxP .
ExerciŃiul 2: Să se determine unghiul dintre dreptele
12
1
2
1:)( 1
zyxd =
−=
−
+ şi
=++
=−
02
01:)( 2 zyx
yd .
SoluŃie: Pentru a putea aplica Teorema 4.4 trebuie să determinăm mai întâi
parametrii directori ai dreptei )( 2d :
111
10,0
21
00,2
21
01222 −===−=== nml .
ObŃinem
cos3
5
)1(0212)2(
)1(10222))(),((
22222221 −=
−++++−
−⋅+⋅+⋅−=dd , de unde
−=
−=
3
5arccos
3
5arccos))(),(( 21 πdd .
5. DistanŃe în spaŃiu
Teorema 5.1 (DistanŃa de la un punct la un plan): Dacă ),,( 0000 zyxM este
un punct, iar )(P este un plan de ecuaŃie 0=+++ DCzByAx , atunci distanŃa de la
punctul 0M la planul )(P este:
222
0000 ))(,(
CBA
DCzByAxPMd
++
+++= . (1)

44
fig. 37
DemonstraŃie: Fie kCjBiAnrrrr
++= , '0M proiecŃia punctului 0M pe planul
)(P şi ),,( 1111 zyxM un punct arbitrar din planul )(P , diferit de '0M . Atunci
0'
00 ))(,( MMPMd = , iar lungimea vectorului 0'
0 MM reprezintă modulul mărimii
proiecŃiei ortogonale a vectorului 01MM pe vectorul normal nr
:
010'
0 MMprMM nr= . ObŃinem deci 010 ))(,( MMprPMd n
r= . Dar, din cele
văzute la produsul scalar, n
nMMMMprn r
r
r
⋅=
01
01 . Va rezulta că
=++
−+−+−=
⋅=
222
10101001
0)()()(
))(,(CBA
zzCyyBxxA
n
nMMPMd r
r
222
000
222
111000
CBA
DCzByAx
CBA
DCzByAxDCzByAx
++
+++=
++
−−−−+++= .
Teorema 5.2 (DistanŃa de la un punct la o dreaptă): Dacă ),,( 1111 zyxM este
un punct, iar )(d este o dreaptă de ecuaŃii n
zz
m
yy
l
xx 000 −=
−=
−, atunci distanŃa
de la punctul 1M la dreapta )(d este
v
vMMdMd r
r×
=10
1 ))(,( , (2)
unde ),,( 0000 zyxM şi knjmilvrrrr
++= .
DemonstraŃie: Punctul ),,( 0000 zyxM se află pe dreapta )(d , iar
knjmilvrrrr
++= este vector director al dreptei )(d . Considerăm paralelogramul
construit pe vectorii 10MM şi vr
.
nr
0M
1M
'0M
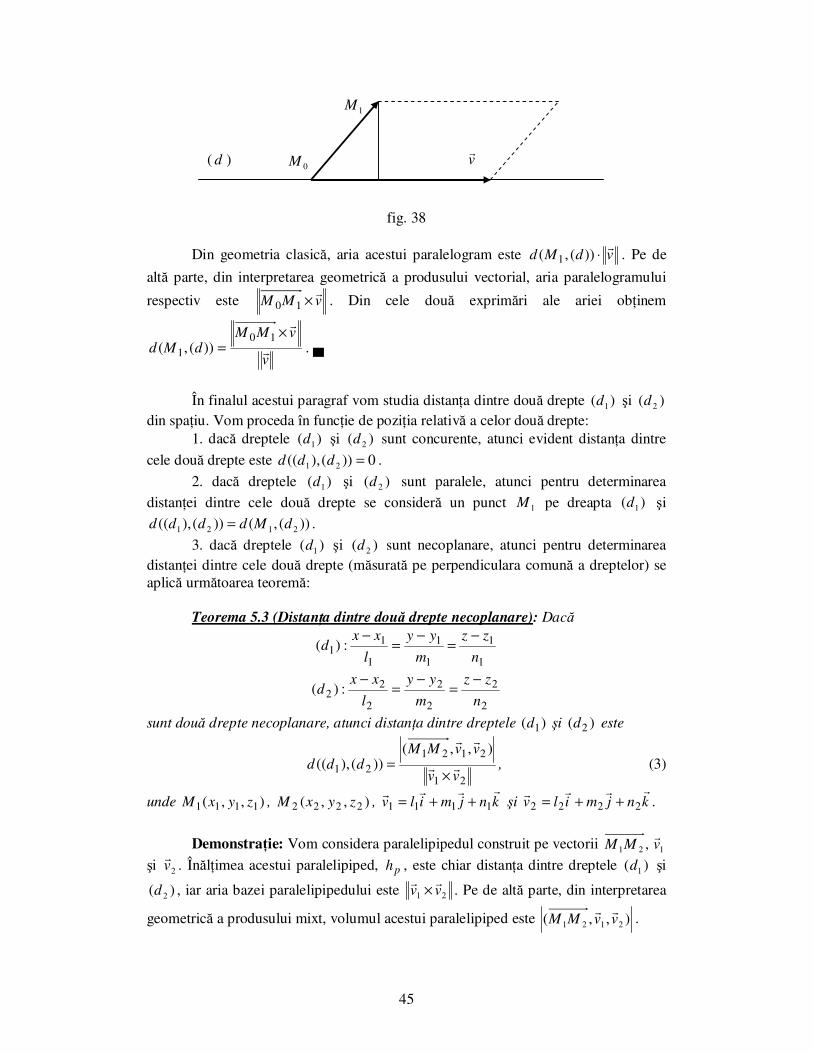
45
fig. 38
Din geometria clasică, aria acestui paralelogram este vdMdr
⋅))(,( 1 . Pe de
altă parte, din interpretarea geometrică a produsului vectorial, aria paralelogramului
respectiv este vMMr
×10 . Din cele două exprimări ale ariei obŃinem
v
vMMdMd r
r×
=10
1 ))(,( .
În finalul acestui paragraf vom studia distanŃa dintre două drepte )( 1d şi )( 2d
din spaŃiu. Vom proceda în funcŃie de poziŃia relativă a celor două drepte: 1. dacă dreptele )( 1d şi )( 2d sunt concurente, atunci evident distanŃa dintre
cele două drepte este 0))(),(( 21 =ddd .
2. dacă dreptele )( 1d şi )( 2d sunt paralele, atunci pentru determinarea
distanŃei dintre cele două drepte se consideră un punct 1M pe dreapta )( 1d şi
))(,())(),(( 2121 dMdddd = .
3. dacă dreptele )( 1d şi )( 2d sunt necoplanare, atunci pentru determinarea distanŃei dintre cele două drepte (măsurată pe perpendiculara comună a dreptelor) se aplică următoarea teoremă:
Teorema 5.3 (DistanŃa dintre două drepte necoplanare): Dacă
1
1
1
1
1
11 :)(
n
zz
m
yy
l
xxd
−=
−=
−
2
2
2
2
2
22 :)(
n
zz
m
yy
l
xxd
−=
−=
−
sunt două drepte necoplanare, atunci distanŃa dintre dreptele )( 1d şi )( 2d este
21
212121
),,())(),((
vv
vvMMddd rr
rr
×= , (3)
unde ),,( 1111 zyxM , ),,( 2222 zyxM , knjmilvrrrr
1111 ++= şi knjmilvrrrr
2222 ++= .
DemonstraŃie: Vom considera paralelipipedul construit pe vectorii 121 , vMMr
şi 2vr
. ÎnălŃimea acestui paralelipiped, ph , este chiar distanŃa dintre dreptele )( 1d şi
)( 2d , iar aria bazei paralelipipedului este 21 vvrr
× . Pe de altă parte, din interpretarea
geometrică a produsului mixt, volumul acestui paralelipiped este ),,( 2121 vvMMrr
.
1M
vr
0M ( d )
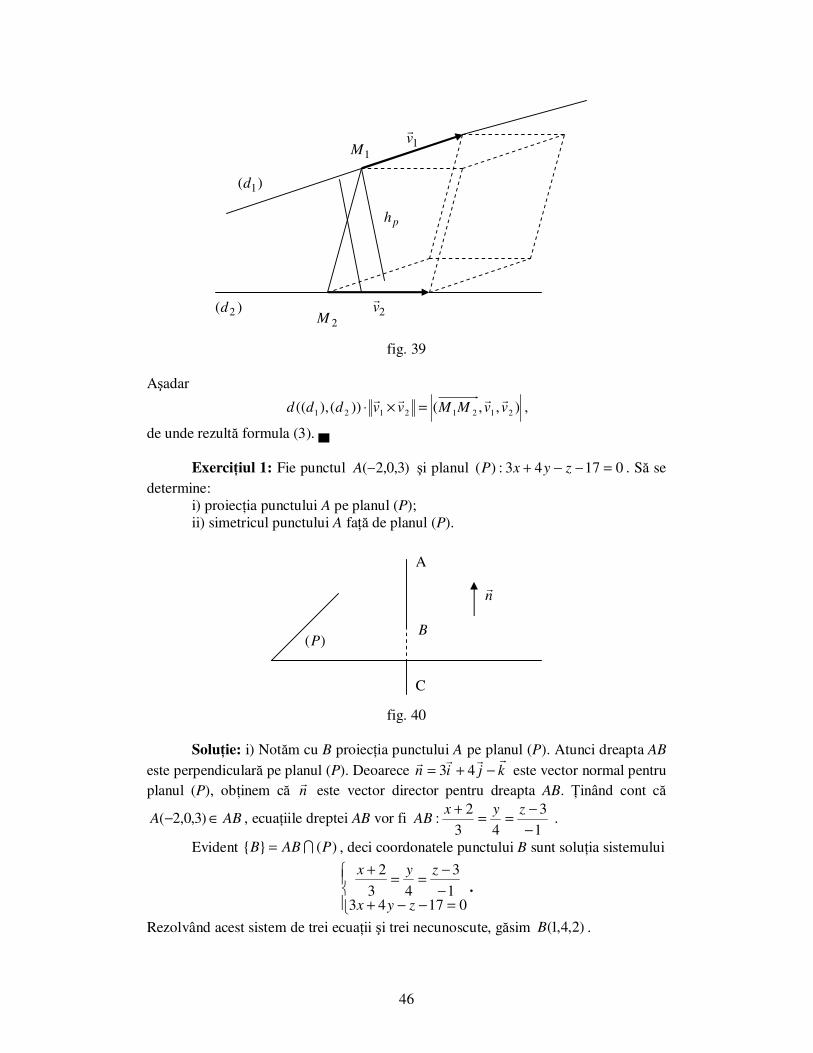
46
fig. 39
Aşadar
),,())(),(( 21212121 vvMMvvdddrrrr
=×⋅ ,
de unde rezultă formula (3).
ExerciŃiul 1: Fie punctul )3,0,2(−A şi planul 01743:)( =−−+ zyxP . Să se determine:
i) proiecŃia punctului A pe planul (P); ii) simetricul punctului A faŃă de planul (P).
fig. 40
SoluŃie: i) Notăm cu B proiecŃia punctului A pe planul (P). Atunci dreapta AB
este perpendiculară pe planul (P). Deoarece kjinrrrr
−+= 43 este vector normal pentru planul (P), obŃinem că n
r este vector director pentru dreapta AB. łinând cont că
ABA ∈− )3,0,2( , ecuaŃiile dreptei AB vor fi 1
3
43
2:
−
−==
+ zyxAB .
Evident )( PABB I= , deci coordonatele punctului B sunt soluŃia sistemului
=−−+−
−==
+
017431
3
43
2
zyx
zyx.
Rezolvând acest sistem de trei ecuaŃii şi trei necunoscute, găsim )2,4,1(B .
1vr
1M
)( 2d 2vr
2M
)( 1d
ph
)(P
A
B
C
nr

47
ii) Dacă notăm cu C simetricul punctului A faŃă de planul (P), atunci punctul B (proiecŃia lui A pe planul (P)) este mijlocul segmentului [AC]. Rezultă că
2CA
Bxx
x+
= , 2
CAB
yyy
+= ,
2CA
Bzz
z+
= .
Deoarece )3,0,2(−A şi )2,4,1(B , vom obŃine )1,8,4(C .
ExerciŃiul 2: Fie punctul )10,3,4(A şi dreapta 5
3
4
2
2
1:)(
−=
−=
− zyxd . Să
se determine: i) proiecŃia punctului A pe dreapta (d); ii) simetricul punctului A faŃă de dreapta (d).
SoluŃie: i) Notăm cu B proiecŃia punctului A pe dreapta (d) şi cu (P) planul
care trece prin punctul A si este perpendicular pe dreapta (d).
fig. 41
Vectorul kjiv
rrrr542 ++= este vector director al dreptei (d) şi deci vector normal
pentru planul (P). Vom obŃine astfel 0)10(5)3(4)4(2:)( =−+−+− zyxP sau echivalent 070542:)( =−++ zyxP .
Se demonstrază fară dificultate că )()( PdB I= . Astfel, coordonatele punctului B sunt soluŃia sistemului
=−++
−=
−=
−
0705425
3
4
2
2
1
zyx
zyx.
Prin rezolvarea acestui sistem găsim )8,6,3(B . ii) Fie C simetricul punctului A faŃă de dreapta (d). Printr-un raŃionament
similar celui de la punctul b) al exerciŃiului precedent se obŃine )6,9,2(C .
B
A
(P)
(d)
vr

48
6. ExerciŃii
1. Să se scrie ecuaŃia planului care: i) este paralel cu planul xOy si trece prin punctul );1,4,2( −A ii) trece prin axa Ox şi prin punctul );2,1,3( −B iii) este paralel cu axa Ox şi trece prin punctele C(4,0,-2) şi D(5,1,7).
2. Să se determine ecuaŃia planului care trece prin punctul )3,5,1( −−M şi este
perpendicular pe planele 02:)( 1 =−−+ zyxP şi 013:)( 2 =++− zyxP .
3. Planul 01823:)( =−++ zyxP formează împreună cu planele de coordonate un tetraedru. Să se determine lungimea diagonalei cubului care poate fi înscris în acest tetraedru, astfel încât trei dintre feŃele sale să coincidă cu planele de coordonate, iar un vârful opus originii să se afle în planul (P).
4. Să se determine α şi β astfel încât planele α=++ zyxP 2:)( 1 ,
3:)( 2 =xP α şi 0:)( 3 =++ zyxP β
i) să se intersecteze după o dreaptă; ii) să se intersecteze într-un punct; iii) să poată forma suprafaŃa laterală a unei prisme. 5. Să se determine punctul M din planul xOy pentru care suma distanŃelor de
la punctele )2,0,3(A şi )4,1,0(B la M este minimă. 6. Se consideră familia de plane
012)1()1(:)( 222 =++++++−− λλλλλλ zyxP
unde R∈λ . Să se arate că :
i) Planele familiei date fac parte dintr-un fascicul de plane ; ii) Există o direcŃie fixă care face acelaşi unghi cu fiecare plan al familiei. 7. Să se scrie ecuaŃiile dreptei care : i) trece prin punctele )1,0,2(A şi )0,1,1( −B ;
ii) trece prin origine şi are vectorul director kjivrrrr
32 −+= . 8. Fie punctele )3,2,1(A , )2,0,2( −B şi )0,3,3(C . Să se scrie ecuaŃiile medianei,
înălŃimii şi bisectoarei din A în triunghiul ABC. 9. StudiaŃi, în funcŃie de parametrul λ , poziŃia relativă a dreptelor
λ
1
21
3:)( 1
−=
−=
− zyxd şi
=−−+
=−+−
022
01:)( 2 zyx
zyxd .

49
10. Să se determine ecuaŃia dreptei care trece prin punctul )2,1,1(M şi este
perpendiculară pe dreapta 2
1
32
1:)(
+==
− zyxd .
11. Fie dreapta 31
1
1
1:)(
−=
−=
− zyxd şi punctul )3,1,1( −A .
i) Să se determine proiecŃia punctului A pe dreapta (d) ; ii) Să se determine simetricul punctului A faŃă de dreapta (d).
12. Fie dreapta
=−−+
=−−+
043
012:)(
zyx
zyxd şi punctul )1,0,1(A din spaŃiu. Să se
determine punctul B de pe dreapta )(d , cel mai apropiat de punctul A şi apoi să se determine distanŃa dintre punctele A şi B.
13*. Se consideră dreptele
=
=−+
0
01:)( 1 z
yxd
=−+
=
02
0:)( 2 zy
xd
=
=−+
0
033:)( 3 y
zxd
a) Să se arate că cele trei drepte sunt două câte două necoplanare şi nu există nici un plan paralel cu toate cele trei drepte ;
b) Fie 1M şi 2M puncte mobile pe dreptele )( 1d şi )( 2d . Să se
determine locul geometric al mijlocului M al segmentului ][ 21MM .
14. Fie punctul )2,7,5( −M , dreapta zyxd −=+=− 32:)( şi planul 032:)( =++ zyxP . Să se calculeze :
i) DistanŃa de la punctul M la dreapta (d) ; ii) DistanŃa de la punctul M la planul (P) ; iii) DistanŃa de la dreapta (d) la planul (P).

50
Capitolul III
SpaŃii vectoriale
1. NoŃiunea de spaŃiu vectorial. Exemple
Pe întreg parcursul acestui capitol prin corp vom înŃelege un corp comutativ. DefiniŃia 1.1: Fie K un corp având elementul unitate notat cu 1. Un spaŃiu
vectorial peste corpul K sau un K-spaŃiu vectorial este un grup abelian (V,+) împreună cu o operaŃie externă
avvaVVK a),(,→× numită înmulŃire cu scalari, cu următoarele proprietăŃi:
1. auavuva +=+ )( , 2. bvavvba +=+ )( ,
3. )()( bvavab = , 4. vv =1 ,
pentru orice VuvKba ∈∈ ,,, .
Elementele lui K se numesc scalari, iar cele ale lui V vectori. Vom nota prin
K0 scalarul nul şi prin V0 vectorul nul.
ObsevaŃie: De cele mai multe ori, în exerciŃii sau exemple se va lucra cu spaŃii
vectoriale peste corpul numerelor reale R sau peste corpul numerelor complexe C. În aceste situaŃii vom spune că avem un spaŃiu vectorial real, respectiv un spaŃiu vectorial complex.
PropoziŃia 1.2: Fie V un K-spaŃiu vectorial, Ka ∈ şi Vv ∈ . Atunci:
1. Vav 0= dacă şi numai dacă Ka 0= sau Vv 0= ;
2. avvava −=−=− )()( .
DemonstraŃie: 1. Fie Ka 0= . Atunci vvvv KKKKK 00)00(0 +=+= , de
unde, prin scădere în ambii membri a termenului vK0 , obŃinem că VK v 00 = .
Asemănător se demonstrează că VVa 00 = .

51
Reciproc, presupunem că Vav 0= . Dacă Ka 0≠ , atunci a este inversabil in K
şi vom avea:
.00)()(1 111VVaavavaavv ===== −−−
2. Se foloseşte punctul 1. al propoziŃiei precum şi relaŃiile: vaavvaaV )()(0 −+=−= şi )()(0 vaavvvaV −+=−= .
Exemple: 1. Orice corp K are o structură de spaŃiu vectorial peste el însuşi, dacă vom considera ca şi operaŃie externă chiar înmulŃirea din corpul K.
2. Fie K un corp şi *N∈n . Definim:
,...,2,1,/),...,,(... 21 niKxxxxKKKK inn =∈=×××= .
Pe mulŃimea nK o operaŃie de adunare: ),...,,(),...,,(),...,,( 22112121 nnnn yxyxyxyyyxxx +++=+
şi o înmulŃire cu scalari: ),...,,(),...,,( 2121 nn axaxaxxxxa = , Ka ∈ .
Se arată fară dificultate că mulŃimea nK este un K-spaŃiu vectorial. De menŃionat că
elementul neutru al operaŃiei de adunare este nK∈)0,...,0,0( , iar opusul elementului
),...,,( 21 nxxx este ),...,,( 21 nxxx −−− .
3. Din Capitolul I, rezultă că mulŃimea 3V a vectorilor liberi din spaŃiu este un
spaŃiu vectorial real, faŃă de adunarea vectorilor liberi şi înmulŃirea vectorilor liberi cu scalari (numere reale). În acest exemplu deosebit de important, elementul neutru este vectorul liber nul 0
r, iar opusul unui element v
r este v
r− (opusul lui v
r ca vector
liber).
4. Fie R corpul numerelor reale, *N∈n şi )(/][)(][ nXgradPXXPXn ≤∈= RR
mulŃimea polinoamelor cu coeficienŃi reali, de grad cel mult n. ][XnR devine un
spaŃiu vectorial real faŃă de operaŃiile de adunare a polinoamelor şi înmulŃire a polinoamelor cu numere reale.
De asemenea, mulŃimea ][XR a polinoamelor cu coeficienŃi reali împreună cu operaŃiile menŃionate anterior are o structură de spaŃiu vectorial real.
5. Dacă în Exemplul 4 se înlocuieşte peste tot corpul numerelor reale R cu
corpul numerelor complexe C (având deci polinoame cu coeficienŃi complecşi), vom obŃine două exemple de spaŃii vectoriale complexe.
6. MulŃimea
continuã][])[( f/b,a:fb,aC R→= a funcŃiilor continue definite pe intervalul ],[ ba cu valori reale, împreună cu operaŃiile de adunare a funcŃiilor şi înmulŃire a funcŃiilor cu numere reale, capătă o structură de spaŃiu vectorial real.

52
7. Fie *N∈nm, . Atunci mulŃimea )(Rnm,M a matricelor cu m linii şi n
coloane şi componente reale, împreună cu operaŃiile de adunare a matricelor şi de înmulŃire a matricelor cu numere reale, devine un spaŃiu vectorial real.
2. DependenŃă şi independenŃă liniară
DefiniŃia 2.1: Fie V un spaŃiu vectorial peste corpul K şi .,...,, 21 Vvvv n ∈
Spunem că vectorul v din V este o combinaŃie liniară a vectorilor nvvv ,...,, 21 cu
scalari din corpul K dacă există Kn ∈ααα ,...,, 21 astfel încât:
nnvvvv ααα +++= ...2211 .
În acest caz, scalarii nααα ,...,, 21 se numesc coeficienŃii combinaŃiei liniare.
DefiniŃia 2.2: Fie V un spaŃiu vectorial peste corpul K şi .,...,, 21 Vvvv n ∈
1. Spunem că vectorii nvvv ,...,, 21 sunt liniar dependenŃi dacă există
Kn ∈ααα ,...,, 21 , nu toŃi nuli, astfel încât:
Vnnvvv 0...2211 =+++ ααα .
În acest caz notăm ,...,, 21 nK vvvdep .
2. Spunem că vectorii nvvv ,...,, 21 sunt liniar independenŃi dacă nu sunt liniar
dependenŃi, adică, dacă din orice relaŃie de forma
Vnnvvv 0...2211 =+++ ααα ,
cu Ki ∈α , rezultă cu necesitate că Kn... 021 ==== ααα . În acest caz notăm
,...,, 21 nK vvvind .
ObservaŃii: Primele trei afirmaŃii sunt consecinŃe imediate ale definiŃiei
precedente: 1. Orice mulŃime de vectori care are o submulŃime liniar dependentă este
liniar dependentă. 2. Orice submulŃime a unei mulŃimi liniar independente este liniar
independentă. 3. Orice mulŃime care conŃine vectorul nul este liniar dependentă. 4. Dacă V este un K-spaŃiu vectorial si v este un vector din V, atunci vindK dacă şi numai dacă Vv 0≠ . Într-adevăr, dacă presupunem vind K atunci,
din observaŃia precedentă, Vv 0≠ . Reciproc, presupunem că Vv 0≠ . Considerăm
scalarul α astfel încât Vv 0=α . Presupunem prin absurd că K0≠α . Deoarece K
este corp, α este inversabil şi vvvV === −− )()(0 11 αααα , contradicŃie. Deci
K0=α , adică vindK .

53
Exemple: 1. În spaŃiul vectorial real nR vectorii: )0,0,...,0,0,1(1 =e , ,0,0)(0,1,0,...2 =e , ..., ,0,1)(0,0,0,...=ne
(vectorul ie are 1 pe poziŃia i şi 0 în rest) sunt liniar independenŃi.
Într-adevăr, fie R∈nααα ,...,, 21 astfel încât nnneeeR
0...2211 =+++ ααα .
Succesiv obŃinem:
)(0,0,...,0),...,,(),0,(0,0,0,......0,...,0,0)0(
,0),0,0,...,0(,0,1)(0,0,0,......,0,0)(0,1,0,...,0,0)(1,0,0,...
212
121
==++
+=+++
nn
n
,, ααααα
αααα
de unde rezultă că 0...21 ==== nααα .
2. În spaŃiul vectorial real 3V versorii k,j,i
rrr sunt liniar independenŃi.
Într-adevăr, dacă γβα ,, sunt trei scalari astfel încât 0rrrr
=++ kji γβα , din unicitatea descompunerii unui vector liber după trei direcŃii necoplanare rezultă că
0=== γβα .
3. În spaŃiul vectorial complex ][XC vectorii nXXX ,...,,,1 2 sunt liniar
independenŃi, deoarece polinomul 011
1 ... αααα ++++ −− XXX n
nn
n este polinomul
nul dacă şi numai dacă toŃi coeficienŃii iα sunt nuli.
4. Se consideră spaŃiul vectorial real al funcŃiilor continue )(RC şi vectorii
)(cos)( 21 xxf = , )(sin)( 2
2 xxf = , 1)(3 =xf . Atunci vectorii )(),( 21 xfxf şi )(3 xf
sunt liniar dependenŃi, deoarece 0)()1()(1)(1 321 =−++ xfxfxf .
5. În spaŃiul vectorial real )(Rnm,M vom nota cu jiE , matricea care are 1 pe
poziŃia (i,j) şi 0 în rest. Atunci vectorii jiE , , cu mi ≤≤1 , nj ≤≤1 , sunt liniar
independenŃi. PropoziŃia 2.3: Fie V un K-spaŃiu vectorial şi Vvvv n ∈,...,, 21 . Vectorii
nvvv ,...,, 21 sunt liniar dependenŃi dacă şi numai dacă există un indice i, ni ≤≤1 ,
astfel încât iv să fie o combinaŃie liniară a celorlalŃi n-1 vectori.
DemonstraŃie: Presupunem că nvvv ,...,, 21 sunt liniar dependenŃi. Atunci
există scalarii nααα ,...,, 21 , nu toŃi nuli, astfel încât
Vnnv...vv 02211 =α++α+α . (1)
Fie iα scalarul care este cu certitudine nenul. Atunci iα este inversabil. Astfel, din
relaŃia (1), obŃinem că
nniiiiiiiii vvvvv )(...)()(...)( 111
111
111
1αααααααα
−
++
−
−−
−−−++−+−++−= ,
deci iv este o combinaŃie liniară a vectorilor .,...,,,..., 111 nii vvvv +−
Reciproc, dacă iv este o combinaŃie liniară a vectorilor nii vvvv ,...,,,..., 111 +− ,
atunci există scrierea
nniiiii vvvvv ββββ +++++= ++−− ...... 111111 .

54
Rezultă că
Vnniiiii vvvvv 0...)1(... 111111 =+++−+++ ++−− ββββ .
Cum 01 ≠− , putem concluziona că nvvv ,...,, 21 sunt liniar dependenŃi.
Prin negarea propoziŃiei precedente se obŃine următorul rezultat: Corolar 2.4: Fie V un K-spaŃiu vectorial şi Vvvv n ∈,...,, 21 . Atunci vectorii
nvvv ,...,, 21 sunt liniar independenŃi dacă şi numai dacă pentru orice indice i,
ni ≤≤1 , vectorul iv nu este o combinaŃie liniară a celorlalŃi n-1 vectori.
PropoziŃia 2.5: Fie V un K-spaŃiu vectorial şi Vvvv n ∈,...,, 21 . Vectorii
nvvv ,...,, 21 sunt liniar independenŃi dacă şi numai dacă orice scriere a unui vector v
din V ca o combinaŃie liniară a vectorilor nvvv ,...,, 21 se realizează în mod unic,
adică dacă avem scrierea nnvvvv ααα +++= ...2211 , cu Ki ∈α , ni ≤≤1 , atunci
coeficienŃii iα ai combinaŃiei liniare sunt unic determinaŃi.
DemonstraŃie: Presupunem mai întâi că nvvv ,...,, 21 sunt liniar independenŃi
şi considerăm Vv ∈ arbitrar. Dacă prin absurd v ar admite două scrieri distincte ca şi combinaŃie liniară a vectorilor nvvv ,...,, 21 , atunci ar exista scalarii nn ββαα ,...,,,..., 11
astfel încât
nnnn vvvvv ββαα ++=++= ...... 1111 ,
cu ii βα ≠ pentru măcar un indice ni ≤≤1 . ObŃinem că
Vnnniii vvv 0)(...)(...)( 111 =−++−++− βαβαβα ,
cu 0≠− ii βα , deci nvvv ,...,, 21 sunt liniar dependenŃi – contradicŃie. Aşadar scrierea
lui v ca o combinaŃie liniară a vectorilor nvvv ,...,, 21 este unică.
Reciproc, presupunem că scrierea oricărui vector v din V ca o combinaŃie liniară a vectorilor nvvv ,...,, 21 se realizează în mod unic. Considerăm Vv 0= şi
observăm că
nV vvv 0...000 21 +++= .
Orice altă scriere de forma nnV vvv ααα +++= ...0 2211 implică
0...21 ==== nααα . Deci nvvv ,...,, 21 sunt liniar independenŃi.
3. Sistem de generatori. Bază a unui spaŃiu vectorial
DefiniŃia 3.1: Fie V un spaŃiu vectorial peste corpul K şi Vvvv n ∈,...,, 21 .
Spunem că vectorii nvvv ,...,, 21 formează un sistem de generatori al spaŃiului V dacă

55
orice vector din V este o combinaŃie liniară a vectorilor nvvv ,...,, 21 , adică pentru
orice Vv ∈ există scalarii nααα ,...,, 21 , astfel încât
nnvvv αα ++= ...11 .
Exemple: 1. În spaŃiul vectorial nR vectorii: )0,0,...,0,0,1(1 =e , ,0,0)(0,1,0,...2 =e , ..., ,0,1)(0,0,0,...=ne
formează un sistem de generatori: dacă ),...,,( 21 nxxxx = este un vector arbitrar din nR , atunci avem evident egalitatea nnexexexx +++= ...2211 .
2. Versorii k,j,i
rrr constituie un sistem de generatori al spaŃiului vectorial 3V ,
deoarece orice vector liber se poate scrie ca o combinaŃie liniară a acestor versori cu anumiŃi scalari.
3. În spaŃiul vectorial ][XnR , al polinoamelor cu coeficienŃi reali, de grad cel
mult n, vectorii nXXX ,...,,,1 2 formează un sistem de generatori, orice polinom de grad cel mult n scriindu-se ca o combinaŃie liniară a monoamelor precedente.
4. În spaŃiul vectorial )(Rnm,M , matricele jiE , , cu mi ≤≤1 , nj ≤≤1 ,
alcătuiesc un sistem de generatori: dacă njijiaA
,1,, )(=
= este o matrice din
)(Rnm,M , atunci are loc egalitatea ∑=
=nm
jijiji EaA
,
1,,, .
ObsevaŃie: În fiecare din exemplele precedente s-au găsit, pentru spaŃiile
vectoriale menŃionate, sisteme de generatori finite (cu un numar finit de elemente). Totuşi există si spaŃii vectoriale care nu admit sisteme de generatori finite. SpaŃiul vectorial ][XR , al polinoamelor cu coeficienŃi reali, este un astfel de exemplu.
DefiniŃia 3.2: Un spaŃiu vectorial care admite o mulŃime finită de generatori
se numeşte spaŃiu vectorial finit generat.
DefiniŃia 3.3: Fie V un spaŃiu vectorial peste corpul K şi ,...,, 21 nvvvB = o
mulŃime de vectori din V. Vom spune că B este o bază a spaŃiului vectorial V dacă: 1. vectorii din B sunt liniar independenŃi; 2. vectorii din B formează un sistem de generatori al lui V.
Exemple: 1. În spaŃiul vectorial nR vectorii: )0,0,...,0,0,1(1 =e , ,0,0)(0,1,0,...2 =e , ..., ,0,1)(0,0,0,...=ne
formează o bază.
2. În spaŃiul vectorial ][XnR , monoamele nXXX ,...,,,1 2 formează o bază.
3. Pentru spaŃiul vectorial )(Rnm,M , mulŃimea 1,1/ , njmiEB ji ≤≤≤≤=
reprezintă o bază.

56
PropoziŃia 3.4: Fie V un K-spaŃiu vectorial şi ,...,, 21 nvvvB = o mulŃime de
vectori din V. Atunci B este o bază a lui V dacă şi numai dacă pentru orice Vv ∈ există şi sunt unici Kn ∈ααα ,...,, 21 cu proprietatea că
nnvvv αα ++= ...11 .
DemonstraŃie: Din DefiniŃia 3.1, existenŃa scalarilor nααα ,...,, 21 este
echivalentă cu faptul că vectorii mulŃimii B formează un sistem de generatori al lui V. Unicitatea scalarilor nααα ,...,, 21 este echivalentă, conform PropoziŃiei 2.5, cu liniar
independenŃa vectorilor din mulŃimea B. DefiniŃia 3.5: Scalarii nααα ,...,, 21 din propoziŃia precedentă se vor numi
coordonatele vectorului v în baza B. Lema 3.6: Fie V un K-spaŃiu vectorial şi ,...,, 21 nvvvS = un sistem de
generatori al lui V. Dacă există un indice i, ni ≤≤1 , astfel încât iv să fie o
combinaŃie liniară a celorlalŃi vectori, atunci mulŃimea \ ivS rămâne un sistem de
generatori al spaŃiului V. DemonstraŃie: Fie Vv ∈ arbitrar ales. Deoarece S este un sistem de
generatori al lui V, există scalarii nααα ,...,, 21 cu proprietatea că
nnii vvvv ααα ++++= ......11 . (1)
Pe de altă parte, deoarece iv este o combinaŃie liniară a vectorilor din \ ivS , există
scalarii nii ββββ ,...,,,..., 111 +− astfel încât
nniiiii vvvvv ββββ +++++= ++−− ...... 111111 . (2)
Înlocuind relaŃia (2) în relaŃia (1), obŃinem egalitatea
1111111111 )(...)()(...)( vvvvv niniiiiiiiii βααβααβααβαα +++++++++= +++−−−
ceea ce arată că \ ivS este un sistem de generatori al lui V.
Teorema 3.7: Fie V un K-spaŃiu vectorial finit generat. Atunci din orice sistem
de generatori al lui V se poate extrage o bază pentru V.
DemonstraŃie: Fie ,...,, 21 nvvvS = un sistem de generatori al spaŃiului
vectorial V. Fără a restrânge generalitatea, putem presupune că toŃi vectorii din S sunt nenuli (altfel, se elimină din S vectorii nuli şi ce se obŃine va rămâne în continuare un sistem de generatori al lui V).
Vom demonstra teorema utilizând metoda inducŃiei matematice. Dacă 1=n atunci 1vS = . Cum 01 ≠v , conform unei observaŃii anterioare,
avem 1vindK , care, împreună cu ipoteza că S este sistem de generatori, conduce la
concluzia că 1vS = este o bază a lui V. Presupunem teorema adevărată pentru spaŃiile vectoriale care admit un sistem
de generatori având 1−n vectori şi o vom demonstra pentru spaŃiile vectoriale care admit un sistem de generatori format din n elemente ,...,, 21 nvvv . Distingem
următoarele două cazuri posibile:

57
1. Vectorii mulŃimii ,...,, 21 nvvv sunt liniar independenŃi. Atunci, evident,
,...,, 21 nvvvS = este o bază a spaŃiului vectorial.
2. Există cel puŃin un vector în mulŃimea ,...,, 21 nvvv care este o combinaŃie
liniară a celorlalŃi vectori din mulŃime. Fie iv acest vector. Atunci, din Lema 3.6,
\ ivS rămâne un sistem de generatori al spaŃiului vectorial. Doarece \ ivS are
1−n elemente, putem aplica ipoteza inductivă şi astfel, din mulŃimea \ ivS se
poate extrage o bază a spaŃiului vectorial. Teorema 3.8 (Teorema schimbului): Fie V un K-spaŃiu vectorial finit generat,
,...,, 21 nvvv un sistem de generatori al lui V şi ,...,, 21 rwww o mulŃime liniar
independentă de vectori din V. Atunci: 1. nr ≤ ; 2. Putem înlocui r vectori din sistemul de generatori, (eventual după o
renumerotare) fie aceştia rvvv ,...,, 21 , cu vectorii rwww ,...,, 21 astfel încât mulŃimea
obŃinută ,...,,,..., 11 nrr vvww + să fie, de asemenea, un sistem de generatori al lui V.
DemonstraŃie: Vom demonstra teorema prin inducŃie matematică după r. Dacă 1=r , atunci evident nr ≤ . Din ipoteza că ,...,, 21 nvvv este un sistem
de generatori al lui V, obŃinem existenŃa scalarilor nααα ,...,, 21 astfel încât
(3)
Deoarece avem 1windK , rezultă Vw 01 ≠ , deci cel puŃin un scalar care apare în
combinaŃia liniară din relaŃia (3) este nenul. Putem presupune, eventual renumerotând vectorii nvvv ,...,, 21 , că 01 ≠α . Astfel, 1α va fi inversabil, care, împreună cu relaŃia
(3), conduce la (4)
Cum ,...,, 21 nvvv este sistem de generatori al lui V, din relaŃia (4) rezultă că
,...,, 21 nvvw este, de asemenea, un sistem de generatori al lui V.
Presupunem acum teorema adevărată pentru un sistem liniar independent având 1−r vectori şi vrem să o demonstrăm în cazul unui sistem liniar independent cu r vectori. Dacă ,...,, 21 rwww este mulŃime liniar independentă, atunci şi
,...,, 121 −rwww este liniar independentă. Folosind ipoteza inductivă, obŃinem că
nr ≤−1 şi că ,...,,,..., 11 nrr vvww − , după o eventuală renumerotare, este un sistem
de generatori al lui V. Dacă am avea nr =−1 , atunci ,..., 11 −rww ar fi un sistem de
generatori al lui V, deci rw ar fi o combinaŃie liniară a vectorilor 11,..., −rww ,
contradicŃie cu liniar independenŃa mulŃimii ,...,, 21 rwww . Aşadar nr <−1 , de unde rezultă că nr ≤ .
Pentru a doua afirmaŃie a teoremei folosim faptul că ,...,,,..., 11 nrr vvww −
este un sistem de generatori al lui V. Astfel, există scalarii nrr ββαα ,...,,,..., 11 − cu
proprietatea că (5)
....22111 nnvvvw ααα +++=
nn vvwv )(...)( 1122
111
111 ααααα −−− −++−+=
....... 1111 nnrrrrr vvwww ββαα +++++= −−

58
Deoarece mulŃimea ,...,, 21 rwww este liniar independentă, atunci cel puŃin unul
dintre scalarii nr ββ ,..., este nenul. Putem presupune, după o eventuală renumerotare,
că ,0≠rβ deci rβ inversabil. Din relaŃia (5) vom obŃine că
.)(...)()(...)( 111
1111
111
1nnrrrrrrrrrrr vvwwwv αβαββαβαβ
−
++
−−
−−
−−−++−++−++−=
Din egalitatea precedentă şi din faptul că ,...,,,..., 11 nrr vvww − este un sistem de
generatori al lui V, rezultă că ,...,,,..., 11 nrr vvww + este un sistem de generatori al lui
V, iar teorema este demonstrată.
Corolar 3.9: Fie V un K-spaŃiu vectorial finit generat. Atunci orice două baze ale lui V au acelaşi număr de elemente.
DemonstraŃie: Fie 1B şi 2B două baze ale lui V, având m şi respectiv n
elemente. În particular 1B este sistem liniar independent de vectori, iar 2B este un sistem de generatori al lui V. Aplicând teorema precedentă obŃinem că nm ≤ . Schimbăm acum rolul lui 1B cu al lui 2B şi făcând acelaşi raŃionament găsim mn ≤ . Din cele două inegalităŃi rezultă că nm = , deci cele două baze au acelaşi cardinal.
Din corolarul de mai sus reiese că numărul de elemente dintr-o bază este un
invariant al spaŃiului vectorial, adică acest număr nu depinde de baza aleasă, ci numai de spaŃiul vectorial considerat. Astfel, are sens următoarea definiŃie:
DefiniŃia 3.10: Numărul de elemente dintr-o bază oarecare a unui K-spaŃiu
vectorial finit generat V se numeşte dimensiunea spaŃiului vectorial şi se notează )(VdimK .
Exemple: Putem menŃiona câteva dimensiuni de spaŃii vectoriale importante: 1. ndim n =)(RR ;
2. 3)( 3 =VdimR ;
3. mndim nnm, =))(( RR MMMM ;
4. 1])[( += nXdim nRR ;
Tot din Corolarul 3.9, rezultă că dacă un spaŃiu vectorial are o bază formată
dintr-un număr infinit de vectori, atunci orice altă bază va conŃine tot un număr infinit de vectori. În acest caz, vom spune că avem un spaŃiu vectorial infinit dimensional şi notăm +∞=)(VdimK .
Un exemplu de spaŃiu infinit dimensional este ][XR , deoarece nu putem găsi un sistem finit de generatori al lui ][XR şi deci cu atât mai mult nu există o bază a lui
][XR cu un număr finit de elemente. Rezultatele prezentate în următorul corolar sunt consecinŃe imediate ale
Teoremei schimbului. Fiecare dintre acestea este deosebit de folositor în aplicaŃiile în care se cere să se verifice dacă un anumit număr de vectori formează o bază într-un spaŃiu vectorial.
Corolar 3.11: Fie V un K-spaŃiu vectorial cu nVdimK =)( . Atunci: 1. Orice mulŃime de m vectori din V, cu nm > , este liniar dependentă;

59
2. Orice mulŃime de n vectori din V este bază a lui V dacă şi numai dacă este mulŃime liniar independentă;
3. Orice mulŃime de n vectori din V este bază a lui V dacă şi numai dacă mulŃimea reprezintă un sistem de generatori al lui V.
ExerciŃiu: Să se arate că mulŃimea
)1,1,0(),0,1,1(),1,0,1( 321 =−=−== vvvB
este o bază a spaŃiului vectorial 3R . DeterminaŃi coordonatele vectorului )3,0,7(=v în această bază.
SoluŃie: Deoarece mulŃimea B are 3 elemente şi 3)( 3 =RRdim , este suficient să arătăm, conform Corolar 3.11, că B este o mulŃime liniar independentă. Considerăm scalarii 321 ααα ,, astfel încât 3R
0332211 =++ vvv ααα , adică
)0,0,0()1,1,0()0,1,1()1,0,1( 321 =+−+− ααα .
Folosind operaŃiile de pe spaŃiile vectoriale de tipul nR , egalitatea precedentă este echivalentă cu relaŃia )0,0,0(),,( 313221 =+−+− αααααα şi mai departe cu
sistemul:
=+−
=+
=−
0
0
0
31
32
21
αα
αα
αα
Avem astfel un sistem liniar omogen, cu număr egal de ecuaŃii şi necunoscute. Deoarece determinantul coeficienŃilor
2
101
110
011
=
−
−
=∆
este nenul, sistemul este de tip Cramer, deci compatibil determinat (i.e. are soluŃie unică). Cum sistemul este omogen, el are soluŃia banală. Deci unica soluŃie va fi
0321 === ααα şi astfel putem conchide că vectorii mulŃimii B sunt liniar
independenŃi. Pentru ultima parte a exerciŃiului trebuie să găsim scalarii 321 ,, βββ cu
proprietatea că 332211 vvvv βββ ++= , adică
)1,1,0()0,1,1()1,0,1()3,0,7( 321 βββ +−+−= .
Ultima egalitate este echivalentă cu sistemul:
=+−
=+
=−
3
0
7
31
32
21
ββ
ββ
ββ
Rezolvând sistemul, găsim 5,5,2 321 =−== βββ .

60
4. SubspaŃii vectoriale
DefiniŃia 4.1: Fie V un K-spaŃiu vectorial. O submulŃime nevidă S a lui V se numeşte subspaŃiu vectorial al lui V dacă cele două operaŃii date pe V induc pe S o structură de K-spaŃiu vectorial.
PropoziŃia 4.2: Fie V un K-spaŃiu vectorial şi S o submulŃime nevidă a lui V. Atunci următoarele afirmaŃii sunt echivalente:
1. S este un subspaŃiu vectorial al lui V; 2. sunt îndeplinite condiŃiile: a) Syx ∈+ , pentru orice ;Sy,x ∈ b) Sx ∈α , pentru orice Sx ∈ şi K∈α ;
3. Syx ∈+ βα , pentru orice Sy,x ∈ şi K∈βα , .
DemonstraŃie: 1.⇒2. AfirmaŃia este clară deoarece S este parte stabilă în raport cu operaŃiile de pe V.
2.⇒ 3. Fie Sy,x ∈ şi K∈βα , arbitrari aleşi. Folosind condiŃia b) obŃinem că Syx ∈βα , , de unde, utilizând condiŃia a), rezultă că Syx ∈+ βα .
3.⇒ 1. Fie Sy,x ∈ arbitrari. Considerând 1=α şi 1−=β , din afirmaŃia 3. rezultă că Syx ∈− , adică S este un subgrup al lui V. Luăm acum 1=α şi 0=β în afirmaŃia 3. şi obŃinem că Sx ∈α . Toate condiŃiile din definiŃia spaŃiului vectorial sunt adevărate, deoarece elementele lui S se află şi în V, deci S posedă o structură de K-spaŃiu vectorial împreună cu operaŃiile de pe V.
ObservaŃie: Orice subspaŃiu vectorial conŃine vectorul nul al spaŃiului
vectorial (se ia 0=α în condiŃia 2b). Exemple : 1. Dacă V este un spaŃiu vectorial, atunci mulŃimea 0 este un
subspaŃiu vectorial al lui V, numit subspaŃiul nul. Orice subspaŃiu diferit de spaŃiul vectorial V şi de subspaŃiul nul 0 se numeşte subspaŃiu propriu.
2. SubmulŃimile
/)0,(0 11 RR ∈=× xx
/),0(0 22 RR ∈=× xx
sunt subspaŃii vectoriale ale lui 2R . (Acest exemplu are următoarea interpretare geometrică: axele de coordonate Ox şi respectiv Oy sunt subspaŃii vectoriale ale planului xOy).
Într-adevăr, fie 0, ×∈ Ryx şi R∈βα , arbitrari. Atunci )0,( 1xx = ,
)0,( 1yy = cu R∈11, yx , iar 0)0,()0,()0,( 1111 ×∈+=+=+ Ryxyxyx βαβαβα . În consecinŃă, folosind PropoziŃia 4.2, obŃinem că 0×R este subspaŃiu vectorial al
lui 2R . Analog se demonstrează că R×0 este subspaŃiu vectorial al lui 2R .
61
3. SpaŃiul vectorial ][XnR este un subspaŃiu vectorial al spaŃiului ][XR ,
deoarece )))(()),((max())()(( XQgradXPgradXQXPgrad ≤+ βα , pentru orice ][)(),( XXQXP R∈ şi R∈βα , .
4. MulŃimea )()( t
nSn AAA =∈= /MM RR (a matricelor simetrice de ordin
n), precum şi mulŃimea / MM tn
An AAA −=∈= )()( RR (a matricelor antisimetrice
de ordin n) sunt subspaŃii vectoriale ale spaŃiului vectorial al matricelor pătratice de ordin n.
5. MulŃimea ])[( b,aD a funcŃiilor derivabile definite pe intervalul [a,b] cu
valori reale este un subspaŃiu vectorial al spaŃiului ])[( b,aC al funcŃiilor continue definite pe intervalul [a,b] cu valori reale.
DefiniŃia 4.3: Dacă 1S şi 2S sunt subspaŃii ale unui spaŃiu vectorial V, atunci
mulŃimea ,/ 22112121 SsSssssSS ∈∈+==+
se numeşte suma subspaŃiilor vectoriale 1S şi 2S .
PropoziŃia 4.4: Fie V un K-spaŃiu vectorial şi 1S , 2S două subspaŃii
vectoriale ale lui V. Atunci 21 SS + şi 21 SS I sunt de asemeni subspaŃii vectoriale ale lui V.
DemonstraŃie: Vom folosi PropoziŃia 4.2. Arătăm mai întâi că suma subspaŃiilor 1S şi 2S este un subspaŃiu al lui V. Fie
21, SSsr +∈ şi K∈βα , arbitrari. Din definiŃia precedentă, 21 rrr += , 21 sss +=
cu 111, Ssr ∈ şi 222 , Ssr ∈ . Astfel
2122112121 SSsrsrssrrsr +∈+++=+++=+ )()( βαβαββααβα ,
deci 21 SS + este un subspaŃiu vectorial al lui V.
Demonstrăm acum că intersecŃia 21 SS I este subspaŃiu al lui V. Fie
21, SSsr I∈ şi K∈βα , arbitrari. Deci iSsr ∈, , 21,i = . Cum iS este un subspaŃiu
al lui V, rezultă că iSsr ∈+ βα , i=1,2, de unde 21 SSsr I∈+ βα . Astfel 21 SS I
este un subspaŃiu vectorial al lui V. ObservaŃie: NoŃiunea de sumă a două subspaŃii vectoriale poate fi extinsă la
un număr arbitrar finit de subspaŃii, şi în acest caz suma subspaŃiilor fiind în contiuare un subspaŃiu vectorial. De asemeni, şi partea din propoziŃia 4.4 privind intersecŃia celor două subspaŃii poate fi generalizată la o familie arbitrară de subspaŃii ale lui V, intersecŃia rămânând şi în acest caz un subspaŃiu vectorial al lui V.
DefiniŃia 4.5: Fie V un K-spaŃiu vectorial şi A o submulŃime nevidă a lui V.
MulŃimea
=∈∈∈= ∑=
niKAvnvASp ii
n
iii ,1,,/)( *
1
αα N

62
se numeşte subspaŃiul vectorial al lui V generat de mulŃimea A. (Sp(A) reprezintă mulŃimea tuturor combinaŃiilor liniare finite care se pot forma cu elemente din A.)
PropoziŃia 4.6: În contextul şi cu notaŃiile definiŃiei precedente, Sp(A) este cel mai mic subspaŃiu vectorial al lui V ce conŃine mulŃimea A.
DemonstraŃie: Demonstrăm întâi că Sp(A) este un subspaŃiu vectorial al lui V. Fie )A(Spu,v ∈ şi K∈βα , arbitrari. Deoarece v şi u sunt combinaŃii liniare ale unor elemente din A, este clar că uv βα + va fi tot o combinaŃie liniară a elementelor lui A, adică )(ASpuv ∈+ βα , deci Sp(A) este subspaŃiu vectorial al lui V.
Considerăm acum S un subspaŃiu vectorial al lui V astfel încât SA ⊆ . Vrem să arătăm că S)A(Sp ⊆ . Fie )A(Spv ∈ arbitrar. Atunci v este de forma
nnvvv αα ++= ...11 cu niKAv ii ,1,, =∈∈ α . Deoarece SAvi ⊆∈ şi S este un
subspaŃiu vectorial al lui V, obŃinem că Svvv nn ∈++= αα ...11 , adică S)A(Sp ⊆ şi
astfel putem conchide că Sp(A) este cel mai mic subspaŃiu vectorial al lui V ce conŃine mulŃimea A.
Dacă V este un K- spaŃiu vectorial, iar 1S , 2S sunt două subspaŃii vectoriale
ale lui V, atunci pentru un vector 21 SSs +∈ este posibil să găsim mai multe
descompuneri de forma 21 sss += , cu 2211 , SsSs ∈∈ . De exemplu, în spaŃiul
vectorial real 3R considerăm subspaŃiile ,/)0,,( 21211 R∈= xxxxS şi
,/),,0( 21212 R∈= yyyyS . Pentru vectorul 3)3,7,1( R∈ avem scrierile )360()011()371( ,,,,,, += şi )3,3,0()0,10,1()3,7,1( −+= . În continuare, vom analiza
cazul în care descompunerea de forma 21 sss += , cu 2211 , SsSs ∈∈ este unică. DefiniŃia 4.7: Suma subspaŃiilor vectoriale 1S şi 2S ale spaŃiului vectorial V
se numeşte sumă directă şi se notează 2121 SSSS ⊕=+ dacă pentru orice vector s
din 21 SS + avem o unică scriere de forma 21 sss += , cu 2211 , SsSs ∈∈ . PropoziŃia 4.8: Fie V un K-spaŃiu vectorial şi 1S , 2S două subspaŃii
vectoriale ale lui V. Atunci următoarele afirmaŃii sunt echivalente: 1. 2121 SSSS ⊕=+ ;
2. 021 VSS =I .
DemonstraŃie: 1.⇒2. Fie 21 SSu I∈ şi considerăm un vector 21 SSs ⊕∈ .
Atunci există 11 Ss ∈ , 22 Ss ∈ astfel încât 21 sss += . Pe de altă parte, )()( ususs −++= 21 şi 11 Sus ∈+ , 22 Sus ∈− . łinând cont că avem o unicitate a
scrierii lui s ca suma a două elemente din 1S şi respectiv 2S , obŃinem că uss += 11
şi uss −= 22 , de unde Vu 0= . Aşadar 021 VSS =I .
2.⇒ 1. Fie 21 SSs ⊕∈ astfel încât 2121 '' sssss +=+= cu 111 ', Sss ∈ şi
222 ', Sss ∈ . ObŃinem că 212211 '' SSssss I∈−=− , de unde rezultă că

63
Vssss 0'' 2211 =−=− , adică 11 'ss = şi 22 'ss = . Unicitatea scrierii s ca suma a două
elemente din 1S şi respectiv 2S probează că 2121 SSSS ⊕=+ . DefiniŃia 4.9: Fie V un K-spaŃiu vectorial şi 1S , 2S două subspaŃii vectoriale
ale lui V. Dacă 21 SSV ⊕= , atunci 1S şi 2S se numesc subspaŃii complementare în
V. Vom mai spune că 2S este un complement al lui 1S . Exemple: 1. SubspaŃiile 01 ×= RS şi R×= 02S (vezi exemplul 2) sunt
subspaŃii complementare în 2R . Într-adevăr, 212 SS +=R şi orice vector
221 )( R∈= x,xx se scrie în mod unic sub forma )0()0( 21 x,,xx += cu 11 )0( S,x ∈ şi
22 )0( Sx, ∈ . 2. Dacă se consideră spaŃiul vectorial )(RnM al matricelor pătratice de
dimensiune n cu componente reale, subspaŃiul )(RSnM al matricelor simetrice şi
subspaŃiul )(RAnM al matricelor antisimetrice (vezi exemplul 4), atunci
)()()( RRR An
Snn MMM ⊕= . Într-adevăr, fie )()( 1 RnnjiijaA M, ∈= ≤≤ matrice
pătratică oarecare. Considerăm matricele:
)()(2
1RS
njiaijaA M' ∈
+= şi )()(2
1RA
njiaijaA M" ∈
−= .
Atunci "' AAA += , ceea ce implică )()()( RRR An
Snn MMM += . Pe de altă parte,
0)()( nA
nSn =RR MM I , deci rezultă că )()()( RRR A
nSnn MMM ⊕= .
PropoziŃia 4.10: Dacă V este un spaŃiu vectorial finit dimensional, atunci
pentru orice subspaŃiu vectorial al său există un complement.
DemonstraŃie:
Fie S un subspaŃiu vectorial al lui V şi ,...,, 21 reeeB = o bază a lui S. Evident B este o mulŃime liniar independentă de vectori din V şi, din Teorema
schimbului, putem completa mulŃimea B la o bază ,...,,,..., 11 nrr eeeeB += a lui V.
Fie ),...,(' 1 nr eeSpS += . Vom arăta că 'S este un complement al lui S.
Într-adevăr, dacă Vv ∈ , atunci, din PropoziŃia 3.4, există şi sunt unici scalarii
nααα ,...,, 21 astfel încât nnrrrr eeeev αααα +++++= ++ ...... 1111 . Dacă notăm
rr ees αα ++= ...11 şi nnrr ees αα ++= ++ ...' 11 , rezultă că 'ssv += , cu Ss ∈ , '' Ss ∈
unic determinaŃi. Astfel 'SSV ⊕= , deci 'S este un complement al lui S. ObservaŃie: În general, complementul unui subspaŃiu vectorial nu este unic.
De exemplu, în spaŃiul vectorial 3R subspaŃiul ,/)0,,( 2121 R∈= xxxxS are ca şi
complemenŃi atât subspaŃiul /),,0(1 R∈= yyyS cât şi subspaŃiul
/),0,0(2 R∈= zzS .
Ultima parte a acestei secŃiuni se ocupă cu studiul dimensiunii subspaŃiilor vectoriale.

64
PropoziŃia 4.11: Fie V un K-spaŃiu vectorial finit dimensional şi S un subspaŃiu vectorial al lui V. Atunci )()( VdimSdim KK ≤ , cu egalitate dacă şi numai dacă VS = .
DemonstraŃie: Fie )(Sdimr K= şi )(Vdimn K= . Considerăm 'B o bază a lui S. În particular 'B este o mulŃime liniar independentă a lui S, deci şi a lui V. Dacă B este o bază a spaŃiului vectorial V, atunci B va fi un sistem de generatori al lui V. Din Teorema schimbului obŃinem acum că )()( VdimSdim KK ≤ .
Dacă )()( VdimSdim KK = , atunci din Teorema schimbului 'B va fi o bază şi a lui V. Astfel VBSpS == )'( . Reciproc, dacă VS = este evident că
)()( VdimSdim KK = .
Teorema 4.12 (Grassmann): Fie V un K-spaŃiu vectorial şi 1S , 2S două subspaŃii vectoriale finit dimensionale ale lui V. Atunci:
DemonstraŃie: Fie pSSdimK =)( 21 I , qSdimK =)( 1 , rSdimK =)( 2 şi
considerăm 21 , ..., e, eeB p= o bază a subspaŃiului 21 SS I . Este clar că 21 SS I
este subspaŃiu şi în 1S şi în 2S , deci aplicând Teorema schimbului putem completa
baza B atât la o bază ''1211 qpp ,...,e, e, ..., e, eeB += a lui 1S , cât şi la o
bază ""1212 rpp ,...,ee,, ..., e, eeB += a lui 2S . Vom arăta că
""1
''121 , rpqpp ,...,ee,...,ee,, ..., e, eeB ++= este o bază a subspaŃiului 21 SS + .
Demonstrăm mai întâi liniar independenŃa:
fie scalarii ""1
''11 ,...,,,...,,,..., rpqpp αααααα ++ astfel încât
.0......... """1
"1
'''1
'111 Vrrppqqpppp eeeeee =++++++++ ++++ αααααα
Rezultă că vectorul
)...(...... """1
"1
'''1
'111 rrppqqpppp eeeeee αααααα ++−=+++++ ++++ (1)
aparŃine lui 21 SS I , deci este o combinaŃie liniară a vectorilor , ..., e, ee p21 . ObŃinem
astfel existenŃa unor scalari pββ ,...,1 astfel încât
)...(... """1
"111 rrpppp eeee ααββ ++−=++ ++
łinând cont de liniar independenŃa mulŃimii 2B , din egalitatea precedentă se obŃine că
0... ""1 ===+ rp αα (2)
Înlocuind relaŃia (2) în (1), rezultă că Vqqpppp eeee 0...... '''1
'111 =+++++ ++ αααα .
Cum 1B este mulŃime liniar independentă, din relaŃia precedentă obŃinem că
0...... ''11 ====== + qpp αααα (3)
RelaŃiile (2) şi (3) asigură liniar independenŃa mulŃimii .B
Vom proba acum că B este un sistem de generatori al lui 21 SS + . Fie
2121 SSsss +∈+= , cu 11 Ss ∈ şi 22 Ss ∈ . 1B fiind sistem de generatori al lui 1S
rezultă că există scalarii qpp γγγγ ,...,,,..., 11 + astfel încât
.)()()()( 212121 SSdimSdimSdimSSdim KKKK I−+=+

65
''11111 ...... qqqppp eeees γγγγ +++++= ++ (4)
Analog, 2B sistem de generatori al subspaŃiului 2S implică existenŃa scalarilor
rpp δδδδ ,...,,,..., 11 + astfel încât
""11112 ...... rrpppp eeees δδδδ +++++= ++ . (5)
Adunând relaŃiile (4) şi (5) şi grupând convenabil termenii se obŃine: ""
11''
1111121 ......)(...)( rrppqqqpppp eeeeeesss δδγγδγδγ ++++++++++=+= ++++
Astfel B constituie şi un sistem de generatori al lui 21 SS + . Pentru a încheia
demonstraŃia este suficient să remarcăm că B conŃine prq −+ elemente.
5. Schimbarea bazei unui spaŃiu vectorial
Fie V un spaŃiu vectorial peste corpul K şi ,...,, 211 neeeB = ,
,...,, 212 nfffB = două baze al lui V. Deoarece 1B este o bază a lui V, conform
PropoziŃiei 3.4 orice vector din V se exprimă în mod unic ca o combinaŃie liniară a vectorilor bazei 1B cu anumiŃi scalari. În particular, acest lucru este valabil şi pentru
vectorii din 2B . Astfel se obŃine următorul sistem de relaŃii:
(1)
cu Kcij ∈ unic determinaŃi.
DefiniŃia 5.1: Matricea
se numeşte matricea de trecere de la baza 1B la baza 2B .
ObservaŃie: Sistemul de relaŃii (1) se poate scrie matricial sub următoarea formă:
+++=
+++=
+++=
nnnnnn
nn
nn
ecececf
ecececf
ecececf
...
...........................................
...
...
2211
22221122
12211111
)(
...
............
...
...
21
22221
11211
K
ccc
ccc
ccc
C n
nnnn
n
n
M∈
=

66
=
n
t
n e
e
e
C
f
f
f
......2
1
2
1
(2)
PropoziŃia 5.2: Fie V un K-spaŃiu vectorial şi ,...,, 211 neeeB = ,
,...,, 212 nfffB = două baze al lui V. Atunci matricea de trecere C de la 1B la 2B
este inversabilă, inversa ei 1−C fiind matricea de trecere de la 2B la 1B . DemonstraŃie: Presupunem prin absurd că matricea de trecere C nu ar fi
inversabilă, adică 0)det( =C . În acest caz, sistemul:
=+++
=+++
=+++
0...
...........................................
0...
0...
2211
2222121
1212111
nnnnn
nn
nn
xcxcxc
xcxcxc
xcxcxc
ar avea şi alte soluŃii diferite de cea banală. Fie nλλλ ,...,, 21 o astfel de soluŃie nenulă.
ObŃinem că:
Vnnnnnnnn eeeccecc 00...0)...(...)...( 11111111 =++=++++++ λλλλ ,
de unde, prin gruparea convenabilă a termenilor, găsim:
Vnnnnnnn ecececec 0)...(...)...( 1111111 =++++++ λλ .
łinând cont de relaŃiile sistemului (1), egalitatea precedentă este echivalentă cu
Vnn ff 0...11 =++ λλ .
Cum cel puŃin unul dintre scalarii nλλλ ,...,, 21 este nenul, rezultă că mulŃimea
,...,, 212 nfffB = este liniar dependentă – o contradicŃie cu ipoteza că 2B este bază.
Aşadar presupunerea făcută este falsă, deci matricea de trecere de la o bază la alta este mereu inversabilă.
Putem folosi acum că matricea C este inversabilă, deci şi matricea tC va fi
inversabilă (deoarece )()( tCdetCdet = ). Astfel, din relaŃia (2) se obŃine că
=
=
−−
n
t
n
t
n f
f
f
C
f
f
f
C
e
e
e
...)(
...)(
...2
1
12
1
12
1
,
ceea ce demonstrează că 1−C este matricea de trecere de la 2B la 1B .
PropoziŃia 5.3: Fie V un K-spaŃiu vectorial ,...,, 211 neeeB = ,
,...,, 212 nfffB = două baze al lui V şi C matricea de trecere de la baza 1B la baza
2B . Dacă nxxx ,...,, 21 sunt coordonatele unui vector Vv ∈ în baza 1B , iar
nyyy ,...,, 21 sunt coordonatele aceluiaşi vector v în raport cu baza 2B atunci:

67
=
nn y
y
y
C
x
x
x
......2
1
2
1
(3)
DemonstraŃie: Deoarece nxxx ,...,, 21 sunt coordonatele lui v în baza 1B , iar
nyyy ,...,, 21 sunt coordonatele lui v în baza 2B , atunci ∑∑==
==n
jjj
n
iii fyexv
11
.
Folosind sistemul de relaŃii (1) vom obŃine:
i
n
i
n
jjij
n
j
n
iiijj
n
jjj
n
iii eycecyfyex ∑ ∑∑ ∑∑∑
= == ===
=
==
1 11 111
.
Deoarece scrierea unui vector într-o bază este unică, rezultă că ∑=
=n
jjiji ycx
1
,
pentru orice ni ≤≤1 . Ultima egalitate este echivalentă cu relaŃia matriceală (3) şi astfel demonstraŃia este completă.
6. ExerciŃii
1. Să se demonstreze că mulŃimea *+R împreună cu operaŃiile
***: +++ →×⊕ RRR , yxyx =⊕ **: ++ →×⊗ RRR , αα xx =⊕
este un spaŃiu vectorial real.
2. Se consideră vectorii )8,6,7(,)4,0,5(,)2,3,1( 321 −==−= vvv
din spaŃiul vectorial 3R . i) Să se demonstreze că vectorii 321 ,, vvv sunt liniar dependenŃi;
ii) Să se determine o relaŃie de liniar dependenŃă între cei trei vectori. 3. Să se studieze liniar independenŃa următorilor vectori:
i) )1,1,1,0(,)1,1,0,1(,)1,0,1,1(,)1,1,1,1( 4321 ==== vvvv din 4R ;
ii) XfXXfXXf 71,2,31 32
22
1 +=+=−+= din ][2 XR ;
iii) xxx exfxefef 2321 ,, === din ])1,0([C ;
iv)
−=
−=
−=
−=
11
10,
11
01,
10
11,
01
114321 AAAA din )(2 RM .

68
4. Fie V un spaŃiu vectorial peste corpul K şi Vvvv ∈321 ,, vectori liniar
independenŃi. Să se arate că vectorii 133221 ,, vvvvvv +++ sunt liniar independenŃi.
Reciproc este adevărat? 5*. Se consideră numerele reale nxxx ...,,, 21 , distincte două câte două. Să se
demonstreze că vectorii:
)1,...,1,1(1 =v , ),...,,( 212 nxxxv = , ),...,,( 222
213 nxxxv = ,..., ),...,,( 11
21
1−−−= k
nkk
k xxxv
sunt liniar independenŃi, pentru orice nk ≤ .
6. StabiliŃi dacă următoarele sisteme de vectori formează baze ale spaŃiilor vectoriale indicate:
i) )3,1,2(,)1,2,3(,)2,3,1( 321 −=−=−= vvv în 3R ;
ii) iviv 42,31 21 +=−= în C (ca spaŃiu vectorial real);
iii) 23
221 1,,1 XfXXfXf +=+=+= în ][2 XR .
7. DeterminaŃi numărul real λ astfel încât vectorii
)2,0,2(,),1,0(,)2,,1( 321 === vvv λλ
să formeze o bază a lui 3R . 8. DeterminaŃi care din următoarele submulŃimi ale lui nR sunt subspaŃii
vectoriale ale lui nR ( 3≥n ):
i) ,1,0/),...,,( 21 nixxxxxS in
n =≥∈== R ;
ii) 0/),...,,( 21 =∈== nn
n xxxxxS R ;
iii) 0/),...,,( 2121 =∈== xxxxxxS nn R ;
iv) 0/),...,,(1
21 =∈== ∑=
n
ii
nn xxxxxS R ;
v) 1/),...,,(1
21 =∈== ∑=
n
ii
nn xxxxxS R .
În cazul subspaŃiilor găsite, aflaŃi dimensiunea lor.
9. Fie S submulŃimea matricelor din )(3 RM de forma
++
00
0
b
cbac
cba
.
Să se demonstreze că S este un subspaŃiu vectorial al lui )(3 RM şi să se determine
dimensiunea lui S, specificând şi o bază.
10. Să se determine coordonatele vectorului )7,0,3(=v din spaŃiul vectorial 3R în baza )3,2,1(,)2,2,1(,)1,1,1( 321 ==== eeeB .

69
11. Să se arate că mulŃimile de polinoame 1,1,1 2XXB ++= şi
2,,1' 222 XXXXB ++= sunt baze în ][2 XR . DeterminaŃi matricea de trecere de la B la 'B .
12. Să se demonstreze că subspaŃiile lui 4R generate de vectorii
)1,1,1,0(,)2,5,1,1(,)5,11,3,2(=U )2,6,2,5(,)4,3,1,1(,)2,3,1,2(=V
sunt complementare.

70
Capitolul IV
SpaŃii euclidiene
1. Produs scalar. Normă
DefiniŃia 1.1: Fie V un spaŃiu vectorial real. O aplicaŃie R→×⋅⋅ VV:,
cu proprietăŃile: 1. xyyx ,, = , pentru orice Vyx ∈, - simetrie;
2. zyzxzyx ,,, +=+ , pentru orice Vzyx ∈,, - aditivitate;
3. yxyx ,, λλ = , pentru orice Vyx ∈, şi orice R∈λ - omogenitate;
4. 0, ≥xx , pentru orice Vx ∈ , cu egalitate dacă şi numai dacă Vx 0= –
pozitiv definire şi nedegenerare, se numeşte produs scalar pe spaŃiul vectorial V.
DefiniŃia 1.2: Un spaŃiu vectorial real pe care s-a definit un produs scalar se numeşte spaŃiu euclidian.
ObservaŃie: Deoarece un spaŃiu euclidian este în primul rând un spaŃiu
vectorial, noŃiuni ca vectori liniar (in)dependenŃi, sistem de generatori, bază, dimensiune etc., introduse pe parcursul Capitolului 3, rămân valabile şi vor prezenta importanŃă şi în cazul spaŃiilor euclidiene. În acelaşi timp, aplicaŃia de produs scalar face posibilă definirea de noi concepte şi prezentarea unor rezultate caracteristice numai spaŃiilor euclidiene.
PropoziŃia 1.3: Produsul scalar ⋅⋅, pe un spaŃiu euclidian V are
proprietăŃile: 1. 0,00, == xx VV ;
2. zxyxzyx ,,, +=+ , pentru orice Vzyx ∈,, ;
3. ∑∑==
=n
iii
n
iii yxyx
11
,, αα , pentru orice Vyxx n ∈,,...1 şi R∈nαα ,...,1 ;
71
4. yxyx ,, λλ = , pentru orice Vyx ∈, şi R∈λ .
DemonstraŃie: 1. Prima egalitate este evidentă din proprietatea de simetrie a
produsului scalar. Pentru cea de-a doua egalitate avem: xxxx VVVVV ,0,0,00,0 +=+= , de unde obŃinem că
0,0 =xV .
2. Din proprietăŃile de simetrie şi aditivitate ale produsului scalar, succesiv avem: zxyxxzxyxzyzyx ,,,,,, +=+=+=+ , pentru orice Vzyx ∈,, .
3. RelaŃia se demonstrează folosind metoda inducŃiei matematice şi proprietatea de aditivitate a produsului scalar.
4. Folosind proprietăŃile de simetrie şi omogenitate ale produsului scalar, vom obŃine:
yxxyxyyx ,,,, λλλλ === , pentru orice Vyx ∈, şi orice R∈λ .
Exemple: 1. SpaŃiul vectorial 3V al vectorilor liberi înzestrat cu produsul
scalar
cos, bababarrrrrr
=⋅= ),( barr
(definit în Capitolul 1) este un spaŃiu euclidian real.
2. Se consideră spaŃiul vectorial real nR şi pentru orice doi vectori nyx R∈, ,
),...,,( 21 nxxxx = , ),...,,( 21 nyyyy = definim
nn yxyxyxyx +++= ..., 2211 .
Se demonstrează fară dificultate că această aplicaŃie verifică axiomele produsului
scalar şi astfel nR devine un spaŃiu euclidian real.
3. Fie 2L spaŃiul vectorial al şirurilor de numere reale ( ) *N∈nnx cu
proprietatea că seria ∑∞
=1
2
iix este convergentă. Definim aplicaŃia:
R→×⋅⋅ 22:, LL , ∑∞
=
=1
,i
ii yxyx ,
pentru orice ( ) *N∈= nnxx şi ( ) *N∈= nnyy şiruri din 2L .
Deoarece ( )22
2
1iiii yxyx +≤ , pentru orice *N∈i , seria ∑
∞
=1iii yx este convergentă,
deci aplicaŃia ⋅⋅, este bine definită. Mai mult, această aplicaŃie verifică şi axiomele
produsului scalar, prin urmare 2L este un spaŃiu euclidian real. 4. Dacă se consideră spaŃiul ]),[( baC al funcŃiilor continue definite pe
intervalul ],[ ba cu valori reale, atunci aplicaŃia
R→×⋅⋅ ]),[(]),[(:, baCbaC , ∫=b
adxxgxfgf )()(,
este un produs scalar pe spaŃiul ]),[( baC .
72
Într-adevăr, pentru ]),[(,, baChgf ∈ şi R∈λ arbitrari, avem:
• fgdxxfxgdxxgxfgfb
a
b
a,)()()()(, === ∫∫ ;
• ∫ ∫∫ =+=+=+b
a
b
a
b
adxxhxgdxxhxfdxxhxgxfhgf )()()()()())()((,
hghf ,, +
• gfdxxgxfdxxgxfgfb
a
b
a,)()()()(, ∫∫ === λλλλ ;
• 0))((, 2 ≥= ∫b
adxxfff , deoarece integrala definită dintr-o funcŃie pozitivă
este întotdeauna pozitivă. Mai mult, dacă 0, =ff , atunci 0))(( 2 =∫b
adxxf , de
unde, Ńinând cont de interpretarea geometrică a integralei şi de faptul că f este continuă, obŃinem că 0))(( 2 =xf , şi astfel 0)( =xf , pentru orice ],[ bax ∈ .
Reciproc, dacă 0)( =xf , pentru orice ],[ bax ∈ , atunci evident 0, =ff .
5. SpaŃiul vectorial real )(Rnm,M al matricelor cu m linii şi n coloane devine
un spaŃiu euclidian real dacă se consideră aplicaŃia
⋅⋅, )(Rnm,M × )(Rnm,M R→ , )(, BATrBA t= .
( )(CTr reprezintă urma matricei pătratice C, adică suma elementelor de pe diagonala principală a matricei C).
Teorema (Cauchy-Buniakowski-Schwarz) 1.4: Dacă V este un spaŃiu euclidian cu produsul scalar ⋅⋅, , atunci
yyxxyx ,,,2
≤ , (1)
pentru orice Vyx ∈, . Egalitatea are loc dacă şi numai dacă vectorii x şi y sunt liniar dependenŃi.
DemonstraŃie: Dacă Vx 0= , atunci 0,, == xxyx , deci în relaŃia (1) avem
egalitate. Pe de altă parte, deoarece orice mulŃime de vectori ce conŃine vectorul nul este liniar dependentă, teorema este demonstrată în acest caz particular.
Putem presupune deci că Vx 0≠ , adică 0, >xx . Considerăm R∈α
arbitrar. Din proprietatea de pozitiv definire a produsului scalar, rezultă că 0, ≥++ yxyx αα . Pe de altă parte, folosind axiomele produsului scalar, avem
yyyxxxyxyx ,,2,, 2 ++=++ αααα ,
deci 0,,2,2 ≥++ yyyxxx αα , pentru orice Vyx ∈, .
Definim funcŃia RR →:ϕ , yyyxxx ,,2,)( 2 ++= αααϕ . Observăm că ϕ este
o funcŃie polinomială de gradul doi, având coeficientul termenului dominant 0, >xx şi cu proprietatea că 0)( ≥αϕ , pentru orice R∈α . ObŃinem că
discriminantul său 0≤∆ , adică 0,,4,42
≤− yyxxyx , de unde rezultă că
yyxxyx ,,,2
≤ .

73
Presupunem acum că yyxxyx ,,,2
= , adică 0=∆ . Atunci ecuaŃia de
gradul doi 0,,2,2 =++ yyyxxx αα are două rădacini reale egale 21 αα = .
ObŃinem deci că 0, 11 =++ yxyx αα . Din proprietatea de nedegenerare a
produsului scalar rezultă că 01 =+ yxα , deci vectorii x şi y sunt liniar dependenŃi. Reciproc, dacă x şi y sunt liniar dependenŃi, atunci există R∈λ astfel încât
xy λ= . Rezultă că 222
,, xxyx α= , iar 22 ,,,,, xxxxxxyyxx ααα == .
Din ultimele două relaŃii obŃinem că yyxxyx ,,,2
= .
DefiniŃia 1.5: Fie V un spaŃiu vectorial real. Se numeşte normă pe spaŃiul V o
aplicaŃie R→⋅ V: care verifică relaŃiile:
1. 0≥x , pentru orice Vx ∈ , cu egalitate dacă şi numai dacă Vx 0= ;
2. yxyx +≤+ , pentru orice Vyx ∈, (inegalitatea triunghiului);
3. xx λλ = , pentru orice Vx ∈ şi R∈λ .
DefiniŃia 1.6: Un spaŃiu vectorial pe care s-a definit o normă se numeşte
spaŃiu normat.
Exemple: 1. AplicaŃiile RR →⋅⋅⋅∞
np
:,,1
, definite prin:
knk
xx,1
max=∞
= ,
,1
1 ∑=
=n
kkxx
pn
k
pkp
xx
1
1
= ∑
=
, 1≥p
sunt norme pe spaŃiul vectorial nR .
2. În spaŃiul vectorial ]),[( baC al funcŃiilor continue definite pe intervalul ],[ ba cu valori reale, aplicaŃia
R→⋅ ]),[(: baC , )(sup],[
xffbax∈
=
este o normă pe ]),[( baC .
PropoziŃia 1.7: Fie V un spaŃiu euclidian. AplicaŃia R→⋅ V: , definită prin
xxx ,= este o normă, numită norma euclidiană.
DemonstraŃie: Axioma 1. din definiŃia normei rezultă imediat din faptul că un
radical de ordin par este pozitiv şi din proprietatea de nedegenerare a produsului scalar. Axioma 3. rezultă din proprietatea de omogenitate a produsului scalar.

74
łinând cont că xxx ,= , din inegalitatea Cauchy-Buniakowski-Schwarz
rezultă că yxyx ≤, , pentru orice Vyx ∈, . ObŃinem astfel:
( ) ,2
,2,2,,2,,
2222
2222
yxyyxxy
yxxyyxxyyyxxxyxyxyx
+=++≤
++≤++=++=++=+
de unde, având în vedere că aplicaŃia este pozitiv definită, rezultă că yxyx +≤+ , pentru orice Vyx ∈, .
Corolar 1.8: Orice spaŃiu euclidian este un spaŃiu normat. ObservaŃie: Dacă V este un spaŃiu euclidian cu produsul scalar ⋅⋅, , iar
Vx ∈ , atunci prin x se înŃelege norma euclidiană a lui x, adică xxx ,= .
Aşa cum s-a văzut anterior, orice produs scalar al unui spaŃiu euclidian induce
o normă. În cele ce urmează, vrem să vedem în ce condiŃii o normă provine dintr-un produs scalar, adică este normă euclidiană.
PropoziŃia 1.9: Fie V un spaŃiu vectorial normat. Norma ⋅ de pe V este o
normă euclidiană dacă şi numai dacă este satisfăcută relaŃia (cunoscută sub numele de identitatea paralelogramului):
( )22222 yxyxyx +=−++ ,
pentru orice Vyx ∈, .
DemonstraŃie: Presupunem că norma lui V este o normă euclidiană. Atunci
există ⋅⋅, un produs scalar pe V astfel încât xxx ,= , oricare ar fi Vx ∈ . Astfel,
Ńinând cont şi de axiomele produsului scalar, obŃinem că:
( )22
22
2,,,,
,,,,,,
yxyyxyyxxx
yyxyyxxxyxyxyxyxyxyx
+=+−−
++++=−−+++=−++
pentru orice Vyx ∈, . Reciproc, presupunem că norma de pe V satisface identitatea paralelogramului.
Vom arăta că aplicaŃia
R→×⋅⋅ VV:, ( )22
4
1, yxyxyx −−+=
este un produs scalar şi că norma ⋅ de pe V provine din acest produs scalar.
Verificăm axiomele din definiŃia produsului scalar: • simetria:
( ) ( ) ( ) xyxyyxxyyxyxyxyx ,4
11
4
1
4
1,
2222222=−−+=−−−+=−−+=
• aditivitatea: observăm că pentru orice Vzyx ∈,, avem:

75
( ) ( )
( ) ( )
( ) ( ) ( ) )2(,22
1
2
1
2
1
4
1
4
1
4
1
4
1,,
222222
2222
2222
zxzxzxyzxyzx
zyxzyxzyxzyx
zyxzyxzyxzyxzyxzyx
=−−+=+−−++
=−−+−+−+−+++
=−−−+−+−+−++=−++
Considerând xy = în relaŃia (2) obŃinem:
zxzx ,2,2 = , (3)
pentru orice Vzx ∈, . Rescriem acum relaŃia (2) cu yx + şi yx − în locul lui x şi respectiv y.
Rezultă că zyxzyzx ,2,2,2 +=+ ,
de unde, folosind relaŃia (3), zyxzyzx ,,, +=+ .
• omogenitatea: se demonstrează prin inducŃie, folosind şi proprietatea de aditivitate probată anterior, că
∑∑==
=m
ii
m
ii yxyx
11
,, ,
pentru orice Vyxx m ∈,,...,1 , În particular, considerând xxx m === ...1 , obŃinem că
yxmymx ,, = ,
pentru orice Vyx ∈, şi orice N∈m .
Deoarece 0,0 =yV , rezultă că yxmymxymx ,,, −=−=− , pentru orice
Vyx ∈, şi orice N∈m . Astfel obŃinem că
yxmymx ,, =
pentru orice Vyx ∈, şi orice Z∈m .
Fie acum *N∈n . Succesiv avem:
yxn
yxn
nn
yxn
nn
yxn
,1
,11
,11
,1
=== ,
de unde rezultă că
yxn
myx
n
m,, = ,
pentru orice Vyx ∈, şi orice Z∈m , *N∈n . Ultima relaŃie este echivalentă cu
yxqyqx ,, = ,
pentru orice Vyx ∈, şi orice Q∈q . Considerăm acum R∈α . Un rezultat din cadrul analizei matematice asigură
existenŃa unui şir de numere raŃionale ( )N∈kkq cu proprietatea că α=
∞→k
kqlim .
Folosind proprietăŃile demonstrate anterior pentru aplicaŃia ⋅⋅, , avem:

76
yxqyxq
yxqyxqyxqyxqyxq
yxqyxyxyxqyxqyxyxyx
kk
kkkkk
kkk
,
,)(,,)(,)(
,,,,,,,,
αα
ααααα
ααααα
−+−=
−+−≤−+−=−
+−=−+−≤−
Trecând la limită ∞→k , din această relaŃie obŃinem 0,, ≤− yxyx αα , ceea ce
conduce la concluzia dorită: yxyx ,, αα = , pentru orice Vyx ∈, şi orice R∈α .
• pozitiv definirea şi nedegenerarea: evident
0,2
≥= xxx ,
cu egalitate dacă şi numai dacă Vx 0= .
DefiniŃia 1.10: Fie V un spaŃiu vectorial real. Se numeşte distanŃă sau metrică
pe V o aplicaŃie R→×VVd : care verifică proprietăŃile: 1. 0),( ≥yxd pentru orice Vyx ∈, , cu egalitate dacă şi numai dacă yx = ;
2. ),(),( xydyxd = , pentru orice Vyx ∈, ; 3. ),(),(),( yzdzxdyxd +≤ , pentru orice Vzyx ∈,, .
DefiniŃia 1.11: Un spaŃiu vectorial pe care s-a definit o distanŃă se numeşte
spaŃiu metric. PropoziŃia 1.12: Fie V un spaŃiu normat. Atunci aplicaŃia R→×VVd : ,
definită prin yxyxd −=),( este o distanŃă pe V.
DemonstraŃie: Vom arăta că aplicaŃia d satisface axiomele din definiŃia
distanŃei. ProprietăŃile de pozitiv definire şi nedegenerare, precum şi inegalitatea triunghiului, rezultă imediat din proprietăŃile corespunzătoare ale normei. Mai trebuie probată simetria:
),(1)(),( xydxyxyyxyxd =−−=−−=−= .
Astfel, aplicaŃia yxyxd −=),( este o distanŃă pe V.
2. Ortogonalitate. Baze ortonormate
Dacă x şi y sunt doi vectori nenuli dintr-un spaŃiu euclidian V, atunci inegalitatea Cauchy-Buniakowski-Schwarz se poate rescrie
1,
1 ≤≤−yx
yx.
Acest lucru justifică introducerea următoarei noŃiuni:

77
DefiniŃia 2.1: Fie V un spaŃiu euclidian şi x, y doi vectori nenuli din V. Se numeşte unghi dintre vectorii x şi y numărul ],0[ πθ ∈ dat de relaŃia:
yx
yx,cos =θ .
DefiniŃia 2.2: Fie V un spaŃiu euclidian. Doi vectori x şi y din V se numesc
ortogonali dacă 0, =yx . În acest caz notăm yx ⊥ .
ObservaŃie: Din PropoziŃia 1.3 rezultă că vectorul nul este ortogonal pe orice
vector al unui spaŃiu euclidian. PropoziŃia 2.3: Fie V un spaŃiu euclidian şi x, y doi vectori din V. Atunci
vectorii x şi y sunt ortogonali dacă şi numai dacă are loc relaŃia
222
yxyx +=+ . (1)
DemonstraŃie: Succesiv avem:
222,2,,,,, yyxxyyxyyxxxyxyxyx ++=+++=++=+ .
Astfel, 222
yxyx +=+ dacă şi numai dacă 0,2 =yx sau, echivalent yx ⊥ .
ObservaŃie: Rezultatul precedent mai este cunoscut sub numele de Teorema
lui Pitagora pentru spaŃii euclidiene. Teorema lui Pitagora din geometria clasică poate fi privită ca un caz particular, dacă se consideră spaŃiul euclidian 3V al
vectorilor liberi cu produsul scalar introdus în paragraful anterior. PropoziŃia 2.4: Dacă V este un spaŃiu euclidian, iar nxxx ,...,, 21 sunt n vectori
nenuli din V, ortogonali doi câte doi, atunci nxxx ,...,, 21 sunt liniar independenŃi.
DemonstraŃie: Vectorii nxxx ,...,, 21 fiind ortogonali doi câte doi înseamnă că
0, =ji xx , pentru orice ji ≠ .
Fie R∈nααα ,...,, 21 astfel încât Vnn xxx 0...2211 =+++ ααα şi fixăm un
indice nk ≤≤1 arbitrar. Rezultă că 0,0,...2211 ==+++ kVknn xxxxx ααα , de
unde obŃinem că 0,,...,, 2211 ==+++ kkkknnkk xxxxxxxx αααα . Din
ultima egalitate, având în vedere că Vkx 0≠ , rezultă 0=kα . Cum indicele k a fost
ales arbitrar, putem conchide că 0=iα , pentru orice ni ≤≤1 , ceea ce implică liniar
independenŃa vectorilor nxxx ,...,, 21 .
DefiniŃia 2.5: O bază a unui spaŃiu euclidian se numeşte bază ortogonală
dacă oricare doi vectori ai bazei sunt ortogonali. Dacă în plus toŃi vectorii bazei sunt de normă 1 atunci baza se numeşte ortonormată.
Din definiŃia precedentă rezultă că IiieB ∈= este bază ortonormată dacă şi
numai dacă

78
ijji ee δ=, ,
pentru orice Iji ∈, , unde
≠
==
ji
jiij pentru,0
pentru,1δ este simbolul lui Kronecker.
ObservaŃie: Se poate introduce următorul concept mai general: o submulŃime
A a unui spaŃiu euclidian se numeşte sistem ortonormat dacă ijji xx δ=, , pentru
orice Axx ji ∈, .
Teorema 2.6: În orice spaŃiu euclidian finit dimensional există o bază
ortonormată. DemonstraŃie: Fie V un spaŃiu euclidian finit dimensional. Atunci V are o
bază finită, ,...,, 21 neeeB = . Găsirea unei baze ortonormate a lui V se face în două
etape: se determină mai întâi, pornind de la baza B, o bază 'B ortogonală; apoi, cu ajutorul bazei intermediare 'B se construieşte baza finală B ortonormată.
Etapa I: Vom construi inductiv baza ',...,','' 21 neeeB = ortogonală. Definim:
• 11' ee = ;
• 1122 '' eee α+= , cu R∈1α . Scalarul 1α se determină din condiŃia de
ortogonalitate 12 '' ee ⊥ , adică 0',' 12 =ee . łinând cont de forma considerată pentru
2'e , obŃinem 0',' 1112 =+ eee α , de unde 0','', 11112 =+ eeee α . Astfel rezultă că
11
121 ','
',
ee
ee−=α .
• 221133 ''' eeee ββ ++= , cu R∈21, ββ . Determinăm 1β şi 2β din
condiŃiile 13 '' ee ⊥ şi 23 '' ee ⊥ . Din prima relaŃie de ortogonalitate obŃinem că
0','' 122113 =++ eeee ββ sau, echivalent, 0','','', 12211113 =++ eeeeee ββ .
Deoarece 0',' 12 =ee , obŃinem 11
131 ','
',
ee
ee−=β . Similar, din 23 '' ee ⊥ găsim
22
232 ','
',
ee
ee−=β .
• Presupunem că s-au construit vectorii Veee k ∈',...,',' 21 , ortogonali
doi câte doi. Definim kkkk eeeee '...''' 221111 λλλ ++++= ++ , cu R∈iλ astfel încât
ik ee '' 1 ⊥+ pentru orice ki ≤≤1 . Din condiŃia 0',' 1 =+ ik ee , obŃinem
ii
iki ee
ee
','
',1+−=λ pentru orice ki ≤≤1 .
Astfel se construiesc vectorii nenuli neee ',...,',' 21 , ortogonali doi câte doi. Din
PropoziŃia 2.4 rezultă că neee ',...,',' 21 sunt liniar independenŃi. Deoarece
ndim =)( VR putem conchide, pe baza Corolarului 3.11 din Capitolul III, că
',...,','' 21 neeeB = este o bază ortogonală a lui V.

79
Etapa II: Considerăm: 1
11
'
'
e
ee = ,
2
22
'
'
e
ee = , ...,
n
nn
e
ee
'
'= . Se verifică fără
dificultate că ,...,, 21 neeeB = este o bază ortonormată a lui V. ObservaŃii: 1. Metoda pentru determinarea unei baze ortogonale, prezentată
în etapa I a demonstraŃiei prcedente este cunoscută sub numele de procedeu Gram-Schmidt sau procedeu de ortogonalizare.
2. Pentru rezolvarea exerciŃiilor în care se cere determinarea unei baze ortonormate într-un spaŃiu euclidian, pornind de la o bază dată, se procedează ca în demonstraŃia Teoremei 2.6.
ExerciŃiul 1: Să se găsească o bază ortonormată a lui 3R , pornind de la baza )2,1,2(),1,2,2(),2,2,1( 321 −=−=== vvvB .
SoluŃie: Etapa I: Determinăm, cu ajutorul procedeului Gram-Schmidt, baza
',','' 321 vvvB = ortogonală. Considerăm
• )2,2,1(' 11 == vv ;
• 122 '' vvv α+= , cu R∈α astfel încât 12 '' vv ⊥ . Din această condiŃie de
ortogonalitate rezultă că 0','
',
11
12=−=
vv
vvα . Astfel obŃinem )1,2,2(' 22 −== vv .
• 221133 ''' vvvv ββ ++= , cu R∈21 , ββ astfel încât 13 '' vv ⊥ şi 23 '' vv ⊥ .
Procedând ca pe parcursul demonstraŃiei Teoremei 2.6, obŃinem 9
4
','
',
11
131 −=−=
vv
vvβ
şi 9
4
','
',
22
232 =−=
vv
vvβ . Înlocuind 21, ββ în expresia lui 3'v găsim
−−=+−=
9
14,
9
7,
9
14'
9
4'
9
4' 2133 vvvv .
Aşadar la finalul primei etape s-a obŃinut baza ortogonală:
( ) ( )
−−=−===
9
14,
9
7,
9
14',1,2,2',2,2,1'' 321 vvvB .
Etapa II: Calculăm mai întâi normele vectorilor din baza 'B :
3441','' 111 =++== vvv
3144','' 222 =++== vvv
3
7
81
196
81
49
81
196','' 333 =++== vvv .
Definind
1
11
'
'
v
vv = ,
2
22
'
'
v
vv = ,
3
33
'
'
v
vv = ,
obŃinem baza ortonormată

80
−−=
−=
==
3
2,
3
1,
3
2,
3
1,
3
2,
3
2,
3
2,
3
2,
3
1321 vvvB .
DefiniŃia 2.7: Fie V un spaŃiu euclidian şi A o submulŃime nevidă a sa.
Spunem că un vector Vx ∈ este ortogonal pe mulŃimea A dacă x este ortogonal pe toŃi vectorii din A. Vom nota cu
)(,/ AyyxVxA ∈∀⊥∈=⊥ mulŃimea vectorilor ortogonali pe A.
PropoziŃia 2.8: În contextul definiŃiei precedente, ⊥A este un subspaŃiu vectorial al lui V.
DemonstraŃie: Fie ⊥∈ Axx ', şi R∈βα , arbitrari. Pentru un Ay ∈ oarecare,
avem 000,',,' =+=+=+ βαβαβα yxyxyxx . Deci yxx ⊥+ 'βα . Cum y a
fost considerat arbitrar în A, rezultă că ⊥∈+ Axx 'βα , deci ⊥A este un subspaŃiu vectorial al lui V.
DefiniŃia 2.9: Dacă S este un subspaŃiu vectorial al unui spaŃiu euclidian V,
atunci ⊥S se numeşte complementul ortogonal al lui S. Teorema 2.10: Fie V un spaŃiu vectorial finit dimensional şi S un subspaŃiu
vectorial al său. Atunci ⊥⊕= SSV .
DemonstraŃie: Din Teorema 2.6 se obŃine existenŃa unei baze ortonormate
,...,, 21 meee a lui S. Fie Vx ∈ arbitrar şi vectorul ∑=
=m
iii eexy
1
, . Evident Sy ∈ şi
în plus, pentru orice mj ≤≤1 , avem:
=−=−=−=− ∑∑==
m
ijiijj
m
iiijjjj eeexexeeexexeyexeyx
11
,,,,,,,,,
0,,,,1
=−=−∑=
jj
m
iijij exexexex δ .
Deci jeyx ⊥− pentru orice mj ≤≤1 . Cum ,...,, 21 meee formează o bază a
lui S, rezultă imediat că yx − este ortogonal pe orice vector din S, adică ⊥∈− Syx .
Astfel ⊥+∈−+= SSyxyx )( şi, cum x a fost considerat arbitrar în V, obŃinem că ⊥+= SSV .
Fie acum ⊥∩∈ SSz . Rezultă că zz ⊥ , adică 0, =zz , de unde Vz 0= .
Deci 0 VSS =∩ ⊥ şi cum ⊥+= SSV , conform PropoziŃiei 4.8 din Capitolul III,
obŃinem ⊥⊕= SSV .

81
DefiniŃia 2.11: Din definiŃia sumei directe a două subspaŃii vectoriale avem ⊥⊕= SSV dacă şi numai dacă orice vector x din V se poate scrie în mod unic sub
forma 'yyx += , cu Sy ∈ şi ⊥∈ Sy' . Vectorul y se va numi proiecŃia ortogonală a
lui x pe subspaŃiul S şi vom nota xpry S= .
ObservaŃie: În contextul şi cu notaŃiile Teoremei 2.10, din demonstraŃia
acesteia rezultă că proiecŃia ortogonală a vectorului x pe subspaŃiul S este dată de relaŃia:
∑=
=n
iii eexy
1
,
ExerciŃiul 2: Să se determine proiecŃia ortogonală a vectorului )3,0,1(=x pe
subspaŃiul lui 3R generat de vectorii )0,1,1(1 =v şi )1,1,2(2 −=v . SoluŃie: Fie R∈βα , astfel încât 3021 R
=+ vv βα . Rezultă că
)0,0,0(),,2( =−++ ββαβα , de unde 0== βα . Deci 1v şi 2v sunt liniar
independenŃi şi ei vor forma o bază a lui ),( 21 vvSp - subspaŃiul lui 3R generat de
vectorii 1v şi 2v .
Construim o bază ortogonală a lui ),( 21 vvSp : considerăm )0,1,1(1'1 == vv şi
'12
'2 vvv α+= , cu
2
3
','
',
11
12−=−=
vv
vvα . Astfel obŃinem
( )
−−=== 1,
2
1,
2
1',0,1,1'' 21 vvB bază ortogonală a lui ),( 21 vvSp .
Calculăm acum 2'1 =v şi
2
6'2 =v . Rezultă că
−−==
===
6
2,
6
1,
6
1,0,
2
1,
2
1'2
'2
2'1
'1
1v
vv
v
vvB
este o bază ortonormată a lui ),( 21 vvSp . Din observaŃia anterioară se obŃine că proiecŃia ortogonală a vectorului x pe
subspaŃiul lui 3R generat de vectorii 1v şi 2v este vectorul
−=
−−−
=−==∑
= 3
5,
3
4,
3
1
3
5,
6
5,
6
50,
2
1,
2
1
6
5
2
1, 21
2
1
vvvvxyi
ii .

82
3. Polinoame ortogonale
DefiniŃia 3.1: Fie I un interval real având extremităŃile a şi b ( R∈ba, ). O funcŃie R→Iw : cu proprietăŃile:
1. 0)( >xw , pentru orice Ix ∈ ;
2. ∞<∫b
a
ndxxwx )( , pentru orice N∈n
se numeşte funcŃie pondere.
ObservaŃie: Integralele având una sau ambele limite de integrare infinite se studiază în cadrul cursului de analiză matematică şi sunt cunoscute sub denumirea de integrale improprii de prima speŃă.
PropoziŃia 3.2: Fie I un interval cu extremităŃile a şi b, iar w o funcŃie pondere
pe I, continuă. Atunci aplicaŃia:
RRR →×⋅⋅ ][][:, xx , ∫=b
adxxwxQxPQP )()()(,
reprezintă un produs scalar pe ][xR .
DemonstraŃie: Mai întâi să observăm că, deoarece ∞<∫b
a
ndxxwx )( , pentru
orice N∈n , integrala ∫b
adxxwxQxP )()()( există şi este finită, pentru orice
][, xQP R∈ , deci aplicaŃia ⋅⋅, este corect definită.
Axiomele din definiŃia produsului scalar se verifică fără dificultate, folosind proprietăŃile integralei.
În continuare, pe tot parcursul acestui paragraf, aplicaŃia ⋅⋅, va reprezenta
produsul scalar introdus în propoziŃia precedentă.
DefiniŃia 3.3: Un şir de polinoame ,...,, 210 PPP din ][XR , cu proprietăŃile:
1. nPgrad n =)( , pentru orice N∈n ;
2. 0, =nm PP , pentru orice nm ≠
se numeşte şir de polinoame ortogonale.
DefiniŃia3.4: Dacă ,...,, 210 PPP este un şir de polinoame ortogonale faŃă de
produsul scalar construit cu ajutorul funcŃiei pondere R→Iw : , atunci I se numeşte interval de ortogonalitate.
ObservaŃie: FuncŃia pondere determină în mod univoc orice polinom din şirul
,...,, 210 PPP de polinoamele ortogonale, până la câte o constantă multiplicativă.
Aceste constante se determină cu ajutorul unei condiŃii suplimentare, impusă tuturor polinoamelor din şir, condiŃie numită standardizare.

83
Vom prezenta în continuare câteva proprietăŃi remarcabile ale şirurilor de polinoame ortogonale.
PropoziŃia 3.5: Dacă ,...,, 210 PPP este un şir de polinoame ortogonale, atunci
orice polinom Q de grad n se poate scrie în mod unic ca o combinaŃie liniară a
polinoamelor nPPP ,...,, 10 , adică există şi sunt unici R∈nααα ,,..., 10 astfel încât
)(...)()()( 1100 xPxPxPxQ nnααα +++= .
DemonstraŃie: Arătăm mai întâi existenŃa, prin inducŃie matematică după n. Pentru 0=n , avem 0)()( 0 == QgradPgrad , deci 0P şi Q sunt polinoame
constante nenule. Punând 0
0 P
Q=α , atunci evident )()( 00 XPXQ α= .
Presupunem afirmaŃia adevărată pentru un N∈n fixat şi vrem s-o demonstrăm pentru 1+n . Fie Q polinom de grad 1+n . Notăm cu λ şi µ
coeficienŃii termenilor dominanŃi ai polinoamelor Q şi respectiv 1+nP . Atunci
)()( 1 xPxQ n+−µ
λ este un polinom de grad cel mult n . Conform ipotezei inductive,
există R∈nααα ,,..., 10 astfel încât
)(...)()()()( 11001 xPxPxPxPxQ nnn αααµ
λ+++=− +
sau, echivalent,
)()(...)()()( 11100 xPxPxPxPxQ nnn +++++=µ
λααα .
Deci orice polinom de grad n se poate scrie ca o combinaŃie liniară a polinoamelor
nPPP ,...,, 10 , pentru orice N∈n .
Demonstrăm acum unicitatea scrierii. Fie Q un polinom de grad n pentru care
)(...)()()(...)()()( 11001100 xPxPxPxPxPxPxQ nnnn βββααα +++=+++= ,
cu R∈nn βββααα ,,...,,,,..., 1010 . Fixăm un indice ni ≤≤1 , arbitrar. Rezultă că, pe
de-o parte )(),()(),(...)()()(),( 1100 xPxPxPxPxPxPxPxQ iiiinni αααα =+++= ,
iar pe de altă parte )(),()(),(...)()()(),( 1100 xPxPxPxPxPxPxPxQ iiiinni ββββ =+++= .
Aşadar )(),()(),( xPxPxPxP iiiiii βα = , de unde, Ńinând cont că iP este polinom
nenul, iar produsul scalar este nedegenerat, obŃinem ii βα = . Astfel rezultă şi
unicitatea scrierii.
ObservaŃie: Concluzia propoziŃiei precedente poate fi probată şi având în vedere că nPPPP ,...,,, 210 sunt polinoame ortogonale, deci sunt liniar independente.
Deoarece 1])[( += nXdim nRR , este clar că polinoamele nPPPP ,...,,, 210 vor
constitui o bază a spaŃiului vectorial ][XnR şi în consecinŃă orice polinom Q de
grad n se poate scrie în mod unic ca o combinaŃie liniară a polinoamelor
nPPPP ,...,,, 210 .
84
Corolar 3.6: Orice şir de polinoame ortogonale constituie o bază a spaŃiului vectorial ][XR .
DemonstraŃie: AfirmaŃia este clară, având în vedere şi PropoziŃia 3.4 din
Capitolul III. PropoziŃia 3.7: Fie ,...,, 210 PPP un şir de polinoame ortogonale şi Q un
polinom oarecare de grad n. Atunci orice polinom mP , cu nm > , este ortogonal pe
polinomul Q .
DemonstraŃie: Conform PropoziŃiei 3.5, există R∈nααα ,,..., 10 astfel încât
∑=
=n
iii xPxQ
1
)()( α . Atunci
0)(),()(),()(),(11
=== ∑∑==
xPxPxPxPxQxP im
n
ii
n
iiimm αα
(ultima egalitate este clară, din ortogonalitatea polinoamelor mP şi iP ). Deci
polinomul mP este ortogonal pe polinomul Q .
Teorema 3.8: Fie ,...,, 210 PPP un şir de polinoame ortogonale. Atunci pentru
orice N∈n polinomul nP are exact n rădăcini reale, distincte două câte două,
aflate în interiorul intervalului de ortogonalitate. DemonstraŃie: Fie mxxx ,...,, 21 punctele din interiorul intervalului de
ortogonalitate în care polinomul nP îşi schimbă semnul. Evident mxxx ,...,, 21 sunt
rădăcini ale polinomului nP şi, din Teorema Fundamentală a Algebrei, nm ≤ . Vom
demonstra că nm = . Presupunem prin absurd că nm < . Considerăm polinomul
∏=
−=Φm
iixxx
1
)()( .
Atunci Φ este un polinom de grad m care îşi schimbă semnul în fiecare dintre punctele mxxx ,...,, 21 . De aici rezultă că )()( xPx nΦ este polinom sau strict pozitiv
sau strict negativ pe intervalul de ortogonalitate, cu excepŃia punctelor mxxx ,...,, 21 şi,
eventual, a capetelor intervalului. Cum )(xw este funcŃie strict pozitivă, atunci
)()()( xwxPx nΦ este funcŃie sau strict pozitivă sau strict negativă pe intervalul de
ortogonalitate, cu excepŃia punctelor mxxx ,...,, 21 şi eventual a capetelor intervalului.
Astfel,
0)()()(, ≠Φ= ∫b
a
nn dxxwxPxPQ ,
contradicŃie cu PropoziŃia 3.7. Deci nm = şi astfel teorema este demonstrată.
Teorema 3.9: Orice şir de polinoame ortogonale ,...,, 210 PPP poate fi definit
printr-o relaŃie de recurenŃă de forma

85
)()()()( 11 xPcxPbxaxP nnnnnn −+ −+= ,
unde nnn cba ,, sunt coeficienŃi care depind de n.
DemonstraŃie: Fie *N∈n fixat. Considerăm mai întâi na astfel încât
)()( 1 xPxxPa nnn +− să fie un polinom de grad cel mult n. Apoi alegem nb astfel încât
)()()( 1 xPxPbxa nnnn +−+ să fie un polinom de grad cel mult 1−n . Conform
PropoziŃiei 3.5, acest ultim polinom se scrie în mod unic sub forma unei combinaŃii liniare a polinoamelor 110 ,...,, −nPPP :
∑−
=+ =−+
1
11 )()()()(
n
iiinnn xPxPxPbxa α (1)
Fixăm acum un indice 21 −≤≤ nj arbitrar. Din relaŃia (1) obŃinem:
)(,)()(),()()(1
11 xPxPxPxPxPbxa j
n
iiijnnn ∑
−
=+ =−+ α ,
sau, echivalent,
)(),()(),()(),()(),(1
11 xPxPxPxPxPxPbxPxxPa ji
n
iijnjnnjnn ∑
−
=+ =−+ α (2)
Deoarece ,...,, 210 PPP este un şir de polinoame ortogonale, din relaŃia (2) rezultă
)(),()(),( xPxPxPxxPa jjjjnn α= (3)
Dar
)(),()())()(()()())(()(),( xxPxPdxxwxxPxPdxxwxPxxPxPxxP jn
b
ajn
b
ajnjn === ∫∫
şi astfel egalitatea (3) este echivalentă cu
)(),()(),( xPxPxxPxPa jjjjnn α= (4)
Cum ))((1))(( xPgradnnxxPgrad nj =<−= , din PropoziŃia 3.7 obŃinem că
0)(),( =xxPxP jn şi astfel, relaŃia (4) conduce la 0=jα pentru orice 21 −≤≤ nj .
Aşadar egalitatea (1) se poate rescrie sub forma: )()()()( 111 xPxPxPbxa nnnnn −−+ =−+ α ,
sau echivalent )()()()( 111 xPxPbxaxP nnnnn −−+ −+= α .
Notând pe 1−nα cu nc , relaŃia de recurenŃă din enunŃul teoremei este clară.
ObservaŃie: Presupunând că polinoamele din şirul considerat sunt de forma
...)( 11 ++= −
−k
kk
kk xxxP µλ ,
din demonstraŃia prezentată anterior se obŃin formulele de calcul direct pentru coeficienŃii relaŃiei de recurenŃă
n
nna
λ
λ 1+= ,
−= −
+ n
n
n
nnn ab
λ
µ
λ
µ 1
1
, 11
1
,
,
−−
−=
nnn
nnnnn PP
PPac
λ
λ, (5)
pentru orice *N∈n .
86
Teorema 3.10: Dacă ,...,, 210 PPP este un şir de polinoame ortogonale, atunci
orice rădăcină a polinomului nP se află situată între două rădăcini ale polinomului
1+nP , pentru orice *N∈n .
DemonstraŃie: Putem presupune, schimbând eventual semnul (acest lucru nu
afectează rădăcinile), că toate polinoamele şirului au termenul dominant pozitiv. Într-o primă etapă demonstrăm prin inducŃie că
)()()()( '1
'1 xPxPxPxP nnnn ++ > , (6)
pentru orice N∈n şi orice x din intervalul de ortogonalitate.
Dacă 0=n , atunci 0)('1 >xP , 0)(0 >xP şi 0)('0 =xP , deci relaŃia (6) este
clară.
Presupunem că pentru un *N∈n , fixat, avem )()()()( '11
' xPxPxPxP nnnn −− > .
Conform Teoremei 3.9, polinoamele şirului satisfac o relaŃie de recurenŃă de forma )()()()( 11 xPcxPbxaxP nnnnnn −+ −+= .
Prin derivare, obŃinem
)()()()()( '1
''1 xPxPbxaxPaxP nnnnnnn −+ −++= .
Atunci
0)]()()()([)()()]()()[(
)()]()()()([)()()()(
'11
'2'1
'1
''1
'1
>−+=−+
−−++=−
−−−
−++
xPxPxPxPcxPaxPxPcxPbxa
xPxPcxPbxaxPaxPxPxPxP
nnnnnnnnnnnnn
nnnnnnnnnnnn
deoarece 0, >nn ca şi, din ipoteza inductivă, 0)()()()( '11
' >− −− xPxPxPxP nnnn . Deci
)()()()( '1
'1 xPxPxPxP nnnn ++ > , pentru orice N∈n şi orice x din intervalul de
ortogonalitate. Considerăm acum ix şi 1+ix două rădăcini consecutive ale )(1 xPn+ . Atunci
0)()()()( '1
'1 => ++ inininin xPxPxPxP şi 0)()()()( 1
'1111
'1 => ++++++ inininin xPxPxPxP
Astfel, )('1 in xP + şi )( in xP , respectiv )( 1
'1 ++ in xP şi )( 1+in xP , au acelaşi semn.
Deoarece )('1 xPn+ îşi schimbă semnul pe intervalul ),( 1+ii xx , atunci şi )(xPn îşi
schimbă semnul pe ),( 1+ii xx . Aşadar, din Proprietatea lui Darboux, )(xPn are cel
puŃin o rădăcină între ix şi 1+ix . łinând cont că, din Teorema 3.8, )(1 xPn+ are 1+n
rădăcini reale distincte, iar )(xPn are n rădăcini reale distincte, atunci )(xPn are
exact o rădăcină între ix şi 1+ix .
În finalul acestui capitol vom prezenta câteva şiruri particulare de polinoame
ortogonale deosebit de importante prin aplicaŃiile lor în diverse zone ale matematicii cum ar fi: ecuaŃii diferenŃiale, teoria interpolării, modelare matematică etc. Toate aceste şiruri particulare se pot obŃine cu ajutorul procedeului Gram-Schmidt din baza
,...,,,1 33
2210 xexexee ==== a spaŃiului de polinoame ][xR , lucrându-se cu
anumite produse scalare de tipul celui introdus în PropoziŃia 3.2.

87
Polinoamele Legendre
Se notează cu )(xPn şi sunt caracterizate de intervalul de ortogonalitate
]1,1[−=I , funcŃia pondere 1)( =xw şi standardizarea 1)1( =nP . Astfel, pentru
determinarea polinoamelor Legendre se aplică procedeul de ortogonalizare, lucrând
cu produsul scalar ∫−=1
1)()(, dxxQxPQP şi găsindu-se mai întâi polinoamele
ortogonale )(~
xPn . Polinoamele )(xPn se obŃin prin multiplicarea fiecărui polinom
)(~
xPn cu o anumită constantă, astfel încât 1)1( =nP . Vom exemplifica acest lucru
găsind primele patru polinoame Legendre:
• 1~
00 == eP ;
• 011~~PeP α+= , cu
00
01~
,~
~,
PP
Pe−=α . Deoarece 0
2
~,
1
1
21
101 ===
−−∫
xxdxPe ,
rezultă că 0=α , de unde xP =1~
;
• 110022~~~PPeP ββ ++= , cu
3
1
23
2
1~
,~
~,
1
1
1
1
2
00
020 −=−=−=−=
∫
∫
−
−
dx
dxx
PP
Peβ şi
02
0
1~
,~
~,
1
1
1
1
3
11
121 =−=−=−=
∫
∫
−
−
dx
dxx
PP
Peβ . Astfel, obŃinem că
3
1~ 22 −= xP .
• 22110033~~~~PPPeP γγγ +++= , cu 0~
,~
~,
00
030 =−=
PP
Peγ ,
5
3~
,~
~,
11
131 −=−=
PP
Peγ ,
0~,
~
~,
22
232 =−=
PP
Peγ . Rezultă că xxP
5
3~ 33 −= .
Deoarece 1)1(~
0 =P , 1)1(~1 =P ,
3
2)1(
~2 =P ,
5
2)1(
~3 =P , obŃinem primele patru
polinoame Legendre:
1)(0 =xP , xxP =)(1 , )13(2
1)( 2
2 −= xxP , )35(2
1)( 3
3 xxxP −= .
RelaŃia de recurenŃă pe care, conform Teoremei 3.9, o satisfac polinoamele Legendre este
)(1
)(1
12)( 11 xP
n
nxxP
n
nxP nnn −+
+−
+
+= .

88
Polinoamele Cebâşev de prima speŃă
Se notează cu )(xTn şi sunt caracterizate de intervalul de ortogonalitate
)1,1(−=I , funcŃia pondere 21
1)(
xxw
−= şi standardizarea 1)1( =nT .
Primele patru polinoame Cebâşev de prima speŃă sunt:
1)(0 =xT , xxT =)(1 , 12)( 22 −= xxT , xxxT 34)( 3
3 −= .
RelaŃia de recurenŃă verificată de polinoamele Cebâşev de prima speŃă este: )()(2)( 11 xTxxTxT nnn −+ −= .
O altă posibilitate de definire a polinoamelor Cebâşev de prima speŃă este dată
de următoarea propoziŃie: PropoziŃia 3.10: Pentru orice N∈n se defineşte funcŃia
R→− ]1,1[:nf , )arccoscos()( xnxfn = .
Atunci au loc următoarele afirmaŃii: 1. )(xfn reprezintă un polinom de gradul n;
2. coeficientul termenului dominant al lui )(xfn este 12 −n , pentru *N∈n ;
3. )()( xTxf nn = , pentru orice )1,1(−∈x .
DemonstraŃie: 1. Pentru un ]1,1[−∈x , fixat arbitrar, notăm cu xt arccos= .
Conform formulei lui Moivre avem
ntinttit n sincos)sin(cos +=+ . Dezvoltând membrul stâng al egalităŃii precedente cu binomul lui Newton şi egalând părŃile reale obŃinem:
...sincossincoscoscos 444222 −+−= −− ttCttCtnt nn
nn
n
Deoarece xt =cos , iar 21sin xt −= , relaŃia anterioară conduce la
...)1()1()( 2244222 −−+−−= −− xxCxxCxxf nn
nn
nn (7)
şi astfel )(xfn este un polinom de gradul n.
2. Coeficientul lui nx , dedus din relaŃia (7), este 142 2...1 −=+++ nnn CC .
3. Vom demonstra că ,...,, 210 fff este un şir de polinoame ortogonale cu
intervalul de ortogonalitate )1,1(−=I şi funcŃia pondere 21
1)(
xxw
−= .
Într-adevăr,
=⋅=−
⋅=−
∫ ∫∫−
= 0
0
1
1
arccos
2coscos
sin
sin)cos()cos(
1
)()(
π
π
ntdtmtdtt
tntmtdx
x
xfxf txnm
+++
=−++ ∫∫πππ
000
)sin()(2
1)cos(
2
1)cos(
2
1ntmt
nmtdtnmtdtnm
0)sin()(2
1
0
=−−
π
ntmtnm
, pentru nm ≠ .

89
Având în vedere că 10cos)1arccoscos()1( === nfn , putem concluziona că
)()( xTxf nn = , pentru orice )1,1(−∈x .
Polinoamele Cebâşev de speŃa a doua
Se notează cu )(xU n şi sunt caracterizate de intervalul de ortogonalitate
)1,1(−=I , funcŃia pondere 21)( xxw −= şi standardizarea 1)1( += nU n .
Primele patru polinoame Cebâşev de speŃa a doua sunt:
1)(0 =xU , xxU 2)(1 = , 14)( 22 −= xxU , xxxU 48)( 3
3 −= .
RelaŃia de recurenŃă verificată de polinoamele Cebâşev de speŃa a doua este: )()(2)( 11 xUxxUxU nnn −+ −= .
Polinoamele Hermite
Se notează cu )(xH n şi sunt caracterizate de intervalul de ortogonalitate
),( ∞−∞=I , funcŃia pondere 2
)( xexw −= , iar standardizarea impune coeficientul
termenului dominant să fie n2 . Primele patru polinoame Hermite sunt:
1)(0 =xH , xxH 2)(1 = , 24)( 22 −= xxH , xxxH 128)( 3
3 −= .
RelaŃia de recurenŃă pe care o verifică polinoamele Hermite este: )(2)(2)( 11 xnHxxHxH nnn −+ −= .
Polinoamele Laguerre
Se notează cu )(xLn şi sunt caracterizate de intervalul de ortogonalitate
),0[ ∞=I , funcŃia pondere xexw −=)( , iar standardizarea impune coeficientul
termenului dominant să fie !
)1(
n
n−.
Primele patru polinoame Laguerre sunt:
1)(0 =xL , 1)(1 +−= xxL , )24(2
1)( 2
2 +−= xxxL , )6189(6
1)( 23
3 +−+−= xxxxL .
RelaŃia de recurenŃă verificată de polinoamele Laguerre este:
)(1
)()12(1
1)( 11 xL
n
nxLnx
nxL nnn −+
+−++−
+= .

90
4. ExerciŃii
1. Fie ][3 xR spaŃiul vectorial al polinoamelor de grad cel mult trei cu
coeficienŃi reali şi aplicaŃia RRR →×⋅⋅ ][][:, 33 xx , definită prin
)2()2()1()1()1()1()2()2(, QPQPQPQPQP ++−−+−−= .
i) Să se demonstreze că această aplicaŃie este un produs scalar pe ][3 xR ;
ii) Să se determine un polinom ortogonal pe ,1 x şi 2x . Câte astfel de poli-noame există?
2. Dacă )(, 2 RM∈BA ,
2,1,)(
==
jiijaA , 2,1,
)(=
=jiijbB se defineşte aplicaŃia
⋅⋅, )(2 RM × )(2 RM R→ , 2222212112121111, babababaBA +++= .
i) Să se demonstreze că această aplicaŃie este un produs scalar;
ii) Să se calculeze
−
−
15
02,
72
31.
3. Fie V un spaŃiu euclidian şi x,y doi vectori din V. Să se arate că yx =
dacă şi numai dacă yxyx −⊥+ . 4. Să se găsească o bază ortonormată a lui 3R , pornind de la baza: i) )2,1,1(),1,0,1(),1,1,1( 321 ==−== vvvB ;
ii) )0,1,1(),1,0,1(),1,1,0( 321 ==== vvvB ;
iii) ),,(),0,,(),0,0,( 321 fedvcbvavB ==== , cu R∈fedcba ,,,,, astfel
încât 0≠acf . 5. Să se găsească o bază ortonormată a lui 4R , pornind de la baza
)1,11,0(),1,01,1(),1,0,1,1(),0,1,1,1( 4321 ===== vvvvB .
6. Să se determine o bază ortonormată a subspaŃiului
02/),,,( 43214321 =−+−= xxxxxxxxS
al lui 4R .
7. Fie V un spaŃiu euclidian finit dimensional şi S un subspaŃiu vectorial al său. Să se arate că VS = dacă şi numai dacă 0 VS =⊥ .
8. Fie V un spaŃiu euclidian şi A o submulŃime a lui V. Să se demonstreze că:
i) ⊥⊥ = )(ASpA ;
ii) )()( ASpA =⊥⊥ .

91
(Remarcă: Acest exerciŃiu arată în particular că, dacă S este un subspaŃiu vectorial al lui V, iar ,...,, 21 msss este o bază a lui S, atunci
1)(,0,/ misvVvS i ≤≤∀=∈=⊥ .)
9. Pe spaŃiul vectorial real ]),[( llC − al funcŃiilor continue definite pe
intervalul ],[ ll− cu valori reale, se consideră aplicaŃia
R→−×−⋅⋅ ]),[(]),[(:, llCllC , ∫−=l
ldxxgxf
lgf )()(
1, .
i) Să se probeze că această aplicaŃie este un produs scalar pe ]),[( llC − ; ii) Să se demonstreze că mulŃimea
,...cos,sin,...,2
cos,2
sin,cos,sin,2
1
l
xn
l
xn
l
x
l
x
l
x
l
x ππππππ
constituie un sistem ortonormat de vectori din ]),[( llC − faŃă de produsul scalar menŃionat anterior.
10. Fie V un spaŃiu euclidian de dimensiune n şi ,...,, 21 mvvv , cu nm ≤ , o
mulŃime de vectori din V. Se defineşte determinantul
mmmm
m
m
m
vvvvvv
vvvvvv
vvvvvv
vvv
,...,,
............
,...,,
,...,,
),...,,(
21
22212
12111
21 =Γ ,
numit determinant Gram al vectorilor ,...,, 21 mvvv . Să se demonstreze că mulŃimea
vectorilor ,...,, 21 mvvv este liniar independentă dacă şi numai dacă determinantul
),...,,( 21 mvvvΓ este nenul.
11*. Fie V un spaŃiu euclidian şi ,...,, 21 nvvv o bază a lui V. Dacă
,...,, 21 neee reprezintă baza ortogonală obŃinută din baza ,...,, 21 nvvv în urma
aplicării procedeului Gram-Schmidt, să se arate că: i) ii ve ≤ , pentru orice ni ≤≤1 ;
ii) ),...,,(),...,,( 2121 nn vvveee Γ=Γ ;
iii) 22
22
121 ...),...,,( nn vvvvvv ≤Γ ,
unde Γ reprezintă determinantul Gram definit în exerciŃiul anterior.

92
Capitolul V
Transformări liniare
1. DefiniŃie. Exemple. ProprietăŃi
DefiniŃia 1.1: Fie V şi 'V două spaŃii vectoriale peste corpul K. O funcŃie
': VVT → se numeşte transformare liniară (aplicaŃie liniară sau morfism de spaŃii vectoriale) dacă satisface următoarele condiŃii:
1. )()()( yTxTyxT +=+ pentru orice Vyx ∈, ; 2. )()( xTxT αα = pentru orice Vx ∈ şi V∈α . O transformare liniară VVT →: se numeşte endomorfism al spaŃiului
vectorial V. Vom nota cu )',( VVL mulŃimea tuturor transformărilor liniare de la V la 'V
şi cu )(VEndK mulŃimea tuturor endomorfismelor lui V. ObsevaŃie: Se verifică imediat că dacă ': VVT → este o transformare
liniară atunci '0)0( VVT = şi )()( xTxT −=− pentru orice .Vx ∈
Exemple 1. Fie V şi V’ două spaŃii vectoriale peste corpul K şi ': VVT → ,
'0)( VxT = pentru orice V.x ∈ Se arată imediat că T este o transformare liniară,
numită transformarea liniară nulă. 2. AplicaŃia K(K)M:Tr n → , Tr(A) = urma matricei A este o transformare
liniară, deoarece Tr(A+B)=Tr(A)+Tr(B) şi )()( xTrxTr αα = , pentru orice
(K)MA,B n∈ şi K∈α . În acelaşi timp, aplicaŃia K(K):Mdet n → , det(A) =
determinantul matricei A nu este transformare liniară, pentru că, în general, )()()( BdetAdetBAdet +≠+ .
3. AplicaŃiile )()(: 011 a,bCa,bCT → , ')(1 ffT = şi R→][: 0
2 a,bCT ,
∫=b
a
dxxffT )()(2 sunt transformări liniare, provenind din domeniul analizei
matematice.

93
4. AplicaŃiile 2221 : RR →,TT , )()(1 x,-yx,yT = şi )()(2 y,xx,yT = reprezintă
endomorfisme ale lui 2R , provenind din domeniul geometriei analitice ( 1T reprezintă
simetria faŃă de axa Ox, iar 2T este simetria în raport cu prima bisectoare a reperului cartezian xOy).
PropoziŃia 1.2: Fie V şi 'V două spaŃii vectoriale peste corpul K. O funcŃie
': VVT → este transformare liniară dacă şi numai dacă: )()()( yTxTyxT βαβα +=+ (1) pentru orice Vyx ∈, şi K∈βα , .
DemonstraŃie: Presupunem mai întâi că T este transformare liniară. Folosind relaŃiile din DefiniŃia 1.1, succesiv obŃinem:
)()()()()( yTxTyTxTyxT βαβαβα +=+=+ pentru orice Vyx ∈, şi α,β V∈ .
Reciproc, presupunem că T satisface relaŃia (1). Considerând 1== βα în relaŃia (1), se obŃine )()()( yTxTyxT +=+ . Pe de altă parte, dacă se consideră 0=β
în relaŃia (1), obŃinem )()( xTxT αα = . Corolar 1.3: Fie V şi 'V două spaŃii vectoriale peste corpul K. O funcŃie
': VVT → este transformare liniară dacă şi numai dacă:
∑∑==
=n
iii
n
iii xTxT
11
)()( αα
pentru orice 10\ ,n N∈ , Vxxx n ∈,...,, 21 şi Kn ∈ααα ,...,, 21 .
DemonstraŃie: Se utilizează PropoziŃia 1.2 şi metoda inducŃiei matematice,
după n. PropoziŃia 1.4: Fie ': VVT → o transformare liniară şi vectorii
.,...,, 21 Vxxx n ∈
1. Dacă nxxx ,...,, 21 sunt liniar dependenŃi, atunci şi vectorii
')(),...,(),( 21 VxTxTxT n ∈ sunt liniar dependenŃi.
2. Dacă vectorii )(),...,(),( 21 nxTxTxT sunt liniar independenŃi, atunci şi
vectorii nxxx ,...,, 21 sunt liniar independenŃi.
DemonstraŃie: 1. Dacă nxxx ,...,, 21 sunt liniar dependenŃi, atunci există
scalarii Kn ∈ααα ,...,, 21 , nu toŃi nuli, astfel încât Vnn xxx 0...2211 =+++ ααα
Aplicând transformarea liniară T acestei egalităŃi şi folosind Corolarul 1.3 , obŃinem că Vnn xTxTxT 0)(...)()( 2211 =+++ ααα , adică )(),...,(),( 21 nxTxTxT sunt liniar
dependenŃi. 2. Acest rezultat este de fapt negarea afirmaŃiei de la punctul 1. Teorema 1.5: Fie V şi V’ două spaŃii vectoriale peste corpul K,
,...,, 21 neeeB = o bază a lui V şi ,...,, 21 nyyy o familie de vectori din spaŃiul 'V .

94
Atunci există şi este unică transformarea liniară ': VVT → astfel încât ii yeT =)(
pentru orice ni ,1= .
DemonstraŃie: Dacă ∑=
=n
iiiex
1
α este un vector arbitrar din V, atunci definim
funcŃia ': VVT → , ∑=
=n
iii yxT
1
)( α ( datorită unicităŃii scrierii unui vector într-o bază
dată, funcŃia este bine definită). Demonstrăm acum că această aplicaŃie este liniară:
considerăm ∑=
=n
iiiex
1
' β un alt vector din V şi scalarii arbitrari Ka,b ∈ . Vom obŃine:
)'()(
)()()'(
11
1111
xbTxaTybya
ybaebaTebeaTbxaxT
n
iii
n
iii
ii
n
iiii
n
ii
n
iii
n
iii
+=+
=+=
+=
+=+
∑∑
∑∑∑∑
==
====
βα
βαβαβα
adică T este transformare liniară. Pentru a proba unicitatea lui T, considerăm o transformare ': VVU → care
satisface de asemenea egalităŃile ii yeU =)( , n1,i = . Fie ∑=
=n
iiiex
1
α un vector
oarecare din V. Atunci:
∑ ∑ ∑∑∑= = ===
=
====
=
n
i
n
i
n
iiiii
n
iiiii
n
iii xTeTeTyeUeUxU
1 1 111
)()()()( ααααα .
Din teorema precedentă rezultă imediat următorul rezultat: Corolarul 1.6: Două transformări liniare de la V la 'V coincid dacă şi numai
dacă ele coincid pe elementele unei baze din V . PropoziŃia 1.7: Fie ': VVT → şi ''': VVU → două transformări liniare.
Atunci '': VVTU →o este o transformare liniară. DemonstraŃie: Considerăm Vyx ∈, şi K∈βα , arbitrari. Atunci:
=+=+=+=+ ))(())(())()(())(())(( yTUxTUyTxTUyxTUyxTU βαβαβαβαo ))(())(( yTUxTU oo βα + ,
deci conform PropoziŃiei 1.2 TU o este o transformare liniară. Teorema 1.8: Fie ':, VVUT → două transformări liniare. Atunci
1. aplicaŃia ': VVUT →+ , definită prin )()())(( xUxTxUT +=+ este o transformare liniară;
2. pentru orice scalar K∈λ , aplicaŃia ': VVT →⋅λ , definită prin )())(( xTxT λλ =⋅ este o transformare liniară.

95
Mai mult, mulŃimea )',( VVL a transformărilor liniare de la V la 'V ,
împreună cu cele două operaŃii definite anterior, formează un spaŃiu vectorial peste corpul K.
DemonstraŃie: Fie Vyx ∈, şi K∈βα , arbitrari. Atunci: 1. +++=+++=++ )()()()()())(( xUyTxTyxUyxTyxUT αβαβαβαβα
))(())(())()(())()(()( yUTxUTyUyTxUxTyU +++=+++= βαβαβ , deci UT + este o transformare liniară.
2. +=+=+=+⋅ )())()(()())(( xTyTxTyxTyxT αλβαλβαλβαλ
))(())(()( yTxTyT ⋅+⋅= λβλαβλ , deci T⋅λ este o transformare liniară. S-au obŃinut astfel: - o operaŃie internă pe )',( VVL
)',()',()',(: VVLVVLVVL →×+ - o operaŃie externă pe )',( VVL cu scalari din K
)',()',(: VVLVVLK →×⋅ Se probează fără dificultate, prin calcul direct, că sunt satisfăcute axiomele din definiŃia spaŃiului vectorial (de menŃionat că vectorul nul în acest spaŃiu vectorial este transformarea liniară nulă, iar opusul vectorului T este transformarea T⋅− )1( ).
Teorema 1.9: Fie V şi 'V două K-spaŃii vectoriale de dimensiune n, respectiv m. Atunci spaŃiul vectorial )',( VVL are dimensiunea mn.
DemonstraŃie: Fie ,...,, 21 neeeB = şi ,...,,' 21 mfffB = baze pentru
spaŃiile vectoriale V şi respectiv 'V . Pentru fiecare pereche de numere naturale ),( lk cu mk ≤≤1 şi nl ≤≤1 , conform Teoremei 1.5, există o unică transformare liniară
':, VVE lk → ,
=
≠=
lif
lieE
kilk ,
,0)(, .
Cu ajutorul simbolului lui Kronecker
=
≠=
li
lili ,1
,0δ putem scrie kliilk feE δ=)(, .
Vom demonstra că cele mn transformări liniare lkE , , mk ≤≤1 , nl ≤≤1 , formează o
bază a spaŃiului vectorial )',( VVL . Considerăm ': VVT → o transformare liniară arbitrară. Pentru fiecare nj ≤≤1 , notăm cu mjjj aaa ,...,, 21 componentele vectorului )( jeT în baza 'B , adică
∑=
=m
kkkjj faeT
1
)( .
Succesiv avem:
∑∑∑∑∑= == ==
===m
k
n
ljlkkl
m
k
n
lkjlkl
m
kkkjj eEafafaeT
1 1,
1 11
)()( δ ,
pentru orice nj ≤≤1 . Din Corolarul 1.6 obŃinem că
∑∑= =
=m
k
n
llkkl EaT
1 1, ,
adică njmklkE ≤≤≤≤ 1,1, este un sistem de generatori pentru )',( VVL .

96
Probăm acum liniar independenŃa transformărilor liniare lkE , , mk ≤≤1 ,
nl ≤≤1 . Presupunem că există scalarii kla astfel încât ∑∑= =
=m
kVVL
n
llkkl Ea
1)',(
1, 0 .
Cum )',(0 VVL este transformarea liniară nulă, obŃinem că ∑∑= =
=m
k
n
ljlkkl eEa
1 1, 0)( ,
pentru orice nj ≤≤1 . Rezultă că ∑∑= =
=m
k
n
lkjlkl fa
1 1
0δ şi astfel avem ∑=
=m
kkkj fa
1
0 .
Liniar independenŃa vectorilor mfff ,...,, 21 implică 0=kja , pentru orice k şi orice j,
adică njmklkE ≤≤≤≤ 1,1, este mulŃime liniar independentă.
Astfel putem conchide că njmklkE ≤≤≤≤ 1,1, este o bază pentru spaŃiul vectorial
)',( VVL şi deci mnVVLdimK =)',( . ExerciŃiu: StabiliŃi dacă următoarea aplicaŃie este transformare liniară:
33: RR →T , )732()( zy,z, -xx-yx,y,zT ++= .
SoluŃie: Utilizăm PropoziŃia 1.2: fie 3222111 ),,(),,,( R∈zyxzyx şi R∈βα , .
Atunci: =+=+ )),,(),,(()),,(),,(( 222111222111 zyxzyxTzyxzyxT βββαααβα
++−+=+++ )()(2(),,( 2121212121 yyxxzzyyxxT βαβαβαβαβα
))(7),()(),(3 21212121 zzyyxxzz βαβαβαβα ++++−+ . Pe de altă parte,
+++=+ )732(),,(),,( 111111222111 z,y, -xz-yxzyxTzyxT αβα
+++=++ )732()732( 111111222222 z,yx, -zy-xz,y, -xz-yx ααααααβ
++−+=++ )()(2()732( 2121222222 yyxxz,yx, -zy-x βαβαββββββ
))(7),()(),(3 21212121 zzyyxxzz βαβαβαβα ++++−+ . Deci T este transformare liniară.
2. Nucleul şi imaginea unei transformări liniare
Fie V şi 'V două spaŃii vectoriale peste acelaşi corp K. DefiniŃia 2.1: Fie ': VVT → o transformare liniară. Numim nucleul
transformării T mulŃimea 0)(/)( 'VxTVxTKer =∈= .
Se numeşte imaginea transformării T mulŃimea )(..)(/')( yxTiaVxVyTmI =∈∃∈=

97
ObservaŃie: Deoarece )(0 TKerV ∈ şi )(0 ' TImV ∈ , atunci nucleul şi
imaginea unei transformări liniare sunt mulŃimi nevide. PropoziŃia 2.2: Dacă ': VVT → este o transformare liniară, atunci nucleul
Ker(T) este un subspaŃiu vectorial al lui V, iar imaginea Im(T) este un subspaŃiu vectorial al lui 'V .
DemonstraŃie: Considerăm )(', TKerxx ∈ şi K∈βα , arbitrari. Deoarece T
este transformare liniară, din PropoziŃia 1.2 obŃinem:
VVVxTxTxxT 000)'()()'( =+=+=+ βαβαβα , deci ),(' TKerxx ∈+ βα aşadar
)(TKer este subspaŃiu vectorial al lui V. Fie acum )TIm('y,y ∈ şi K∈βα , oarecare. Deoarece )(', TImyy ∈ , există
elementele Vxx ∈', astfel încât yxT =)( şi ')'( yxT = . Pe de altă parte, ')'()()'( yyxTxTxxT βαβαβα +=+=+ , deci ),(' TImyy ∈+ βα adică )(TIm
este un subspaŃiu vectorial al lui V. În cele ce urmează, cu ajutorul noŃiunilor de nucleu şi imagine vom caracteriza
injectivitatea, respectiv surjectivitatea, unei transformări liniare. PropoziŃia 2.3: Fie ': VVT → o transformare liniară. Atunci următoarele
afirmaŃii sunt echivalente: 1. T este injectivă; 2. 0)( VTKer = ;
3. T transformă orice mulŃime de vectori liniar independenŃi din V într-o mulŃime de vectori liniar independenŃi din 'V .
DemonstraŃie: .2.1 ⇒ Am văzut anterior că )(0 TKerV ⊆ . Vom proba şi
incluziunea inversă. Fie )(TKerx ∈ . Rezultă că '0)( VxT = . Deoarece '0)0( VVT = ,
Ńinând cont de injectivitatea lui T, obŃinem că Vx 0= . Aşadar 0)( VTKer ⊆ şi deci
0)( VTKer = .
.3.2 ⇒ Fie nxxx ,...,, 21 vectori liniar independenŃi din V. Considerăm scalarii
nααα ,...,, 21 astfel încât '1
0)( V
n
iii xT =∑
=
α . Cum T este transformare liniară, obŃinem
că '1
0)( V
n
iii xT =∑
=
α şi astfel 0)(1
V
n
iii TKerx =∈∑
=
α . Deoarece vectorii
nxxx ,...,, 21 sunt liniar independenŃi, rezultă că Kn 0...21 ==== ααα , adică
)(),...,(),( 21 nxTxTxT sunt liniar independenŃi.
.1.3 ⇒ Fie Vxx ∈21, , 21 xx ≠ . Atunci Vxx 021 ≠− , deci 21 xx − este un
vector liniar independent. Conform afirmaŃiei 3., vectorul )( 21 xxT − este liniar
independent, deci nenul. ObŃinem că '2121 0)()()( VxxTxTxT ≠−=− , adică
)()( 21 xTxT ≠ , ceea ce arată că T este o transformare liniară injectivă.

98
PropoziŃia 2.4: Pentru o transformare liniară ': VVT → , următoarele afirmaŃii sunt echivalente:
1. T este surjectivă; 2. ')( VTIm = ;
3. T transformă orice sistem de generatori al lui V într-un sistem de generatori al lui 'V .
DemonstraŃie: .2.1 ⇔ Această echivalenŃă este evidentă din definiŃia funcŃiei
surjective. .3.2 ⇒ Presupunem că nxxx ,...,, 21 este un sistem de generatori al lui V.
Considerăm un vector arbitrar )(' TImVy =∈ . Atunci există un vector Vx ∈ astfel
încât yxT =)( . Deoarece nxxx ,...,, 21 constituie un sistem de generatori al lui V,
există scalarii nααα ,...,, 21 astfel încât ∑=
=n
iii xx
1
α . Rezultă că yxTn
iii =
∑=1
α ,
adică yxTn
iii =∑
=1
)(α şi deci )(),...,(),( 21 nxTxTxT formează un sistem de generatori
al lui 'V . .1.3 ⇒ Deoarece V este un sistem de generatori pentru V, rezultă că )(VT este
un sistem de generatori pentru 'V . Cum )(VT este un subspaŃiu vectorial al lui 'V , obŃinem că ')( VVT = , adică T este surjectivă.
DefiniŃia 2.5: Pentru o transformare liniară ': VVT → dimensiunea nucleului )(TKer se numeşte defectul transformării T şi se notează def(T), iar dimensiunea
imaginii )(TIm se numeşte rangul transformării T şi se notează rang(T). Teorema 2.6 (Teorema rang-defect): Fie V şi 'V două K-spaŃii vectoriale
finit dimensionale şi ': VVT → o transformare liniară. Atunci are loc relaŃia: )()( TrangTdefVdimK += .
DemonstraŃie : Fie Vdimn K= şi considerăm ,...,, 211 meeeB = o bază a lui
)(TKer . Deoarece )(TKer este un subspaŃiu vectorial al lui V, putem completa baza
1B la o bază ,...,,,...,, 121 nmm eeeeeB += a lui V. Vom demonstra că
)(),...,( 12 nm eTeTB += este o bază a lui )(TIm .
Fie y )(TIm∈ arbitrar. Rezultă că există un element x în V astfel ca yxT =)( . B fiind o bază a lui V, în particular este sistem de generatori, deci există scalarii
Kn ∈αα ,...,1 astfel încât ∑=
=n
iiiex
1
α . Rezultă că
,)()()()()(11 111
∑∑ ∑∑∑+== +===
=+==
==
n
miii
m
i
n
miiiii
n
iii
n
iii eTeTeTeTeTxTy ααααα
deci )(),...,( 1 nm eTeT + este un sistem de generatori pentru )(TIm .
Demonstrăm acum liniar independenŃa acestor vectori. Considerăm scalarii Knm ∈+ ββ ,...,1 cu proprietatea că

99
'Vnnmm eT...eT 0)()( 11 =++++ ββ .
T fiind o transformare liniară, obŃinem
'Vnnmm eβ...eβT 0)( 11 =++++
sau echivalent )(11 TKereβ...eβ nnmm ∈++++ . Dar ,...,, 211 meeeB = este o bază a
lui Ker(T), deci există scalarii Km ∈ββ ,...,1 astfel încât
mmnnmm eβ...eβeβ...eβ ++=++++ 1111 ,
adică
Vnnmmmm eβ...eβeβ...eβ 01111 =−−−++ ++ .
Pe de altă parte, ,...,,,...,, 121 nmm eeeeeB += este o bază a lui V, deci mulŃime liniar
independentă, de unde rezultă că 011 ====== + nmm β...ββ...β ,
şi astfel mulŃimea )(),...,( 12 nm eTeTB += este liniar independentă, deci bază a lui
Im(T). S-a obŃinut aşadar că: )()( TdefVdimmnTrang K −=−= , de unde rezultă
imediat relaŃia dorită. DefiniŃia 2.7: O transformare liniară ': VVT → se numeşte izomorfism dacă
este bijectivă. Dacă în plus 'VV = , atunci T se numeşte automorfism. Vom spune că V şi 'V sunt spaŃii vectoriale izomorfe şi vom nota '~VV − dacă
există un izomorfism ': VVT → . ObservaŃie: Se poate verifica fără dificultate că relaŃia de izomorfism pe
mulŃimea spaŃiilor vectoriale peste corpul K are proprietăŃile: 4. este reflexivă: VV −~ ; 5. este simetrică: dacă '~VV − , atunci şi VV −~' ;
6. este tranzitivă: dacă '~VV − şi "~' VV − , atunci "~VV − . Astfel, putem afirma că izomorfismul spaŃiilor vectoriale este o relaŃie de echivalenŃă.
PropoziŃia 2.8: Dacă ': VVT → este un izomorfism, atunci şi aplicaŃia
VVT →− ':1 este un izomorfism.
DemonstraŃie: Este suficient să demonstrăm că 1−T este transformare liniară (bijectivitatea fiind evidentă). Considerăm Vyx ∈, şi K∈βα , arbitrari. Rezultă că
yxyxTT βαβα +=+− ))(( 1 , (1) iar pe de altă parte
yxyTTxTTyTxTT βαβαβα +=+=+ −−−− ))(())(())()(( 1111 . (2) Cum T este injectivă, din relaŃiile (1) şi (2) obŃinem că
)()()( 111 yTxTyxT −−− +=+ βαβα ,
adică 1−T este un izomorfism. Teorema 2.9: Orice K-spaŃiu vectorial de dimensiune n este izomorf cu spaŃiul
vectorial nK .

100
DemonstraŃie: Fie V un K-spaŃiu vectorial de dimensiune n şi
,...,, 21 neeeB = o bază a lui V. Definim o aplicaŃie nKVT →: în următorul mod:
dacă Vx ∈ atunci ),...,,()( 21 nxxxxT = , unde nxxx ,...,, 21 sunt componentele
vectorului x în baza B, adică ∑=
=n
iiiexx
1
.
Demonstrăm că T este transformare liniară: fie ∑=
=n
iiiexx
1
, ∑=
=n
iiieyy
1
şi
K∈βα , arbitrari. Deoarece ∑=
+=+n
iiii eyxyx
1
)( βαβα , rezultă că
),...,,(),...,,(),...,,()( 21212211 nnnn yyyxxxyxyxyxyxT βαβαβαβαβα +=+++=+
)()( yTxT βα += .
Fie )(TKerx ∈ . Atunci )0,...,0,0(0)( KKKK nxT == . łinând cont de
definirea transformării liniare T, avem VnKKK eeex 00...00 21 =+++= . Aşadar
0)( VTKer = şi din PropoziŃia 2.3 obŃinem că T este transformare liniară injectivă.
Pentru a proba surjectivitatea lui T considerăm nn Kyyyy ∈= ),...,,( 21 arbitrar.
Atunci Veyn
iii ∈∑
=1
şi în plus ),...,,( 211
n
n
iii yyyeyT =
∑=
.
Deci transformarea T construită anterior este un izomorfism de spaŃii
vectoriale şi astfel spaŃiile vectoriale V şi nK sunt izomorfe. Corolarul 2.10: Două K-spaŃii vectoriale finit dimensionale V şi 'V sunt
izomorfe dacă şi numai dacă 'VdimVdim KK = .
DemonstraŃie: Presupunem mai întâi că V şi 'V sunt K-spaŃii vectoriale
izomorfe, deci există un izomorfism ': VVT → . Din injectivitatea şi surjectivitatea
lui T obŃinem 0)( VTKer = , respectiv ')( VTIm = şi astfel 0)( =TKerdimK , iar
')( VdimTImdim KK = . Folosind acum Teorema rang-defect rezultă că
')()( VdimTImdimTKerdimVdim KKKK =+= .
Reciproc, dacă nVdimVdim KK == ' , atunci din Teorema 2.9 rezultă că nKV −~ şi nKV −~' . Deoarece izomorfismul de spaŃii vectoriale constituie o relaŃie de
echivalenŃă (în particular, este simetrică şi tranzitivă), obŃinem că '~VV − . Corolarul 2.11: Fie V şi 'V două K-spaŃii vectoriale de dimensiune n,
respectiv m. Atunci spaŃiul vectorial al transformărilor liniare )',( VVL şi spaŃiul
vectorial )(, KnmM al matricelor cu m linii şi n coloane sunt izomorfe. În particular,
)(VEndK şi )(KnM sunt spaŃii vectoriale izomorfe.

101
DemonstraŃie: În Teorema 1.9 s-a demonstrat că mnVVLdimK =)',( . łinând
cont de faptul că şi mnKdim nm,K =)(M , din Corolarul 2.10 obŃinem că )',( VVL şi
)(, KnmM sunt spaŃii vectoriale izomorfe.
PropoziŃia 2.12: Fie V şi 'V două K-spaŃii vectoriale finit dimensionale, cu
'VdimVdim KK = şi ': VVT → o transformare liniară. Atunci următoarele afirmaŃii sunt echivalente:
1. T este injectivă; 2. T este surjectivă; 3. T este izomorfism. DemonstraŃie: .2.1 ⇒ Deoarece T este injectivă, din PropoziŃia 2.3 avem
0)( VTKer = şi deci 0)( =Tdef . Din ipoteză şi din Teorema rang-defect rezultă că
)(' TrangVdimVdim KK == şi astfel )(' TImV = , adică T este surjectivă. .1.2 ⇒ Din surjectivitatea lui T obŃinem ')( VTIm = , de unde
VdimVdimTrang KK == ')( . Aplicând Teorema rang-defect rezultă că 0)( =Tdef ,
adică 0)( VTKer = , ceea ce probează că T este injectivă.
.3.1 ⇒ S-a văzut anterior că injectivitatea lui T implică şi surjectivitatea. Astfel, presupunând că T este injectivă, obŃinem că T este transformare liniară bijectivă, adică un izomorfism.
.1.3 ⇒ Evident. ExerciŃiu: Se consideră transformarea liniară
23: RR →T , ),3(),,( 3221321 xxxxxxxT +−= .
Să se determine nucleul şi imaginea transformării T. VerificaŃi Teorema rang-defect.
SoluŃie: Din definiŃia nucleului avem 0)(/)( 23
RR =∈= xTxTKer . Cu alte
cuvinte, dacă )(),,( 321 TKerxxxx ∈= , atunci )0,0(),,( 321 =xxxT , adică
)0,0(),3( 3221 =+− xxxx . ObŃinem astfel sistemul
=+
=−
0
03
32
21
xx
xx.
Acesta este un sistem omogen, simplu nedeterminat, cu soluŃia
=
−=
−=
α
α
α
3
2
1 3
x
x
x
, unde R∈α .
Deci /),,3()( R∈−−= ααααTKer . Evident 1)( =TKerdimR , o bază a nucleului fiind )1,1,3( −− .
Pe de altă parte, 32 )/()( RR ∈∃∈= xyTIm astfel încât )( yxT = . Aceasta
înseamnă că )(),( 21 TImyy ∈ dacă şi numai dacă sistemul
=+
=−
232
121 3
yxx
yxx (3)

102
este compatibil. Notând
−=
110
031A matricea coeficienŃilor sistemului, iar
−=
2
1
110
031
y
yA matricea extinsă a sistemului, rezultă că
2)()( == ArangArang . Aşadar, din Teorema Kronecker-Capelli, sistemul de ecuaŃii
(3) este compatibil, independent de valorile 1y şi 2y . Rezultă că 2)( R=TIm , de
unde 2)( =TImdimR . Egalitatea din Teorema rang-defect este satisfăcută deoarece
)()(2133 TImdimTKerdimdim RRRR +=+== .
3. Matricea asociată unei transformări liniare
Toate spaŃiile vectoriale considerate în această secŃiune vor avea dimensiunea finită.
Fie V şi 'V două spaŃii vectoriale peste corpul K, cu nVdimK = şi
mVdimK =' . Considerăm ,...,, 21 neeeB = o bază a lui V, ',...,','' 21 meeeB = o
bază a lui 'V şi fie ': VVT → o transformare liniară. Deoarece ')( VeT i ∈ , pentru
orice ,ni 1= , iar 'B este o bază a lui 'V , atunci există şi sunt unici scalarii ija astfel
încât
+++=
+++=
+++=
''')(
''')(
''')(
2211
22221122
12211111
mmnnnn
mm
mm
ea...eaeaeT
................................................
ea...eaeaeT
ea...eaeaeT
(1)
DefiniŃia 3.1: Matricea A care se obŃine considerând transpusa matricei
coeficienŃilor sistemului de relaŃii (1) se numeşte matricea asociată transformării liniare T în bazele B şi 'B . Notăm:
==
mnmm
n
n
B,B
a...aa
............
a...aa
a...aa
TAA
21
22221
11211
' )(
Dacă T este un endomorfism al lui V, iar BB =' , atunci A se numeşte matricea asociată endomorfismului T în baza B şi se notează )(TAB .
În secŃiunea precedentă s-a demonstrat că spaŃiul vectorial al transformărilor liniare )',( VVL şi spaŃiul vectorial )(Knm,M al matricelor cu m linii şi n coloane

103
sunt izomorfe. Putem indica acum, cu ajutorul definiŃiei precedente, un izomorfism între aceste două spaŃii vectoriale:
)()',(: , KVVL nmM→Φ , )()( ', TAT BB=Φ .
Acest izomorfism are drept consecinŃe imediate următoarele afirmaŃii: - dacă ':, 21 VVTT → sunt două transformări liniare, atunci 1T şi 2T coincid
dacă şi numai dacă matricele lor asociate )( 1', TA BB şi )( 2', TA BB sunt egale;
- dacă ':, 21 VVTT → sunt două transformări liniare, atunci transformării
liniare sumă 21 TT + i se asociază matricea )()( 2',1', TATA BBBB + . Cu alte cuvinte
)()()( 2',1',21', TATATTA BBBBBB +=+ ;
- dacă ': VVT → este o transformare liniară şi K∈λ , atunci transformării liniare Tλ i se asociază matricea )(', TA BBλ . Altfel spus, )()( ',', TATA BBBB λλ = .
În particular, dacă 'VV = , aplicaŃia )()(: KVEnd nK M→Φ , )()( TAT B=Φ
stabileşte un izomorfism între spaŃiul vectorial )(VEndK al endomorfismelor lui V şi
spaŃiul vectorial )(KnM al matricelor pătratice de ordin n cu componente din corpul
K. Se poate demonstra, având în vedere şi propoziŃia următoare, că aplicaŃia Φ stabileşte chiar un izomorfism de inele între ),),(( o+VEndK şi ),),(( ⋅+KnM .
PropoziŃia 3.2: Fie ",', VVV trei spaŃii vectoriale peste corpul K,
,...,, 21 neeeB = , ,...,,' 21 meeeB = , respectiv ,...,," 21 peeeB = baze ale acestor
spaŃii, iar ':1 VVT → , "':2 VVT → două transformări liniare. Dacă )( 1', TA BB este
matricea asociată lui 1T în bazele B şi 'B , iar )( 2",' TA BB este matricea asociată lui
2T în bazele 'B şi "B , atunci transformării ":12 VVTT →o îi este asociată, în
bazele B şi "B , matricea )()( 1',2",' TATA BBBB ⋅ , adică
)()()( 1',2",'12", TATATTA BBBBBB ⋅=o .
DemonstraŃie: Dacă njmiijBB aTA ,1,,11', )()(
=== şi mipkkiBB bTA ,1,,12",' )()(
=== ,
atunci, din modul cum s-a definit matricea asociată unei transformări liniare în două baze date, rezultă că
∑=
=m
iiijj eaeT
11 ')( , ∑
=
=p
kkkii ebeT
12 ")'( ,
pentru orice nj ,1= şi respectiv mi ,1= . Vom obŃine că:
===
== ∑∑∑∑
====
p
kkki
m
iij
m
iiij
m
iiijjj ebaeTaeaTeTTeTT
1112
121212 ")'('))(())(( o
∑ ∑= =
p
kk
m
iijki eab
1 1
" , pentru orice nj ,1= .

104
Deci njpkkjBB cTTA ,1,,112", )()(==
=o , unde ∑=
=m
iijkikj abc
1
şi astfel este clar că
)()()( 1',2",'12", TATATTA BBBBBB ⋅=o .
Corolarul 3.3: Dacă VVT →: este un automorfism având matricea asociată
)(TAB în raport cu baza B a lui V, atunci matricea asociată lui 1−T în baza B este 1)( −TAB , altfel spus 11 )()( −− = TATA BB .
DemonstraŃie: Din PropoziŃia 3.2 avem )()()( 11 −− ⋅= TATATTA BBB o sau
echivalent )()()( 1−⋅= TATAIdA BBVB . Deoarece matricea asociată aplicaŃiei
identice în orice bază este matricea unitate nI de ordin n, cu Vdimn K= , rezultă că
nBB ITATA =⋅ − )()( 1 , de unde obŃinem 11 )()( −− = TATA BB .
PropoziŃia 3.4: Fie ': VVT → o transformare liniară, ,...,, 21 neeeB = o
bază a lui V, ',...,','' 21 meeeB = o bază a lui 'V şi Vx ∈ un vector oarecare. Dacă
∑=
=n
iiiexx
1
este scrierea lui x în baza B, iar ∑=
==m
jjjeyxTy
1
')( reprezintă scrierea
imaginii lui x prin transformarea T în baza 'B , atunci între componentele ix şi
componentele iy există relaŃia:
∑=
=n
iijij xay
1
, mj ,1= (2)
DemonstraŃie: Din ipoteză ∑=
=n
iiiexx
1
. Aplicând transformarea T acestei
egalităŃi şi folosind liniaritatea lui T, precum şi sistemul de relaŃii (1), obŃinem:
∑ ∑ ∑ ∑∑∑= = = ===
===
=
n
i
n
i
m
jj
n
iiji
m
jjjiiii
n
iii exaeaxeTxexTxT
1 1 1 111
'')()(
Dar, cu notaŃiile din enunŃ ∑=
=m
jjj eyxT
1
')( . łinând cont de unicitatea scrierii unui
vector într-o bază dată, obŃinem imediat că
∑=
=n
iijij xay
1
.
ObservaŃie: Matriceal, relaŃia (2) se rescrie astfel: AXY = (3)
unde tmyyyY ),...,,( 21= şi t
nxxxX ),...,,( 21= .
În finalul acestei secŃiuni vom studia cum se modifică matricea asociată unei
transformări liniare la schimbarea bazei.

105
Teorema 3.5: Fie ': VVT → o transformare liniară, ,...,, 21 neeeB = şi
,...,, 211 nfffB = baze ale lui V, iar ',...,','' 21 meeeB = şi ',...,','' 211 mfffB =
baze ale lui 'V . Dacă C este matricea de trecere de la baza B la baza 1B , iar 'C
matricea de trecere de la 'B la '1B , atunci
CTACTA BBBB )()'()( ',1
', 11
−= .
DemonstraŃie: Presupunem că
njiijcC,1,
)(=
= , mjiijcC
,1,)'('
== ,
njmiijBB aTA,1,,1', )()(
=== ,
njmiijBB aTA,1,,1', )'()(
11 === .
Folosind definiŃia matricei asociate unei transformări liniare, precum şi definiŃia matricei de trecere de la o bază la alta într-un spaŃiu vectorial, vom obŃine pe de-o parte:
∑ ∑∑ ∑∑∑= == ===
=
==
=
m
kk
n
jjikj
n
j
m
kkkjji
n
jjji
n
jjjii ecaeaceTcecTfT
1 11 111
'')()( , (4)
pentru orice ni ,1= , iar pe de altă parte:
'''''''')(1 11 11
k
m
k
m
jjikj
m
j
m
kkkjji
m
jjjii eacecafafT ∑ ∑∑ ∑∑
= == ==
=
== , (5)
pentru orice ni ,1= . Având în vedere unicitatea scrierii unui vector într-o bază dată, din relaŃiile (4)
şi (5) obŃinem
∑∑==
=m
jjikj
n
jjikj acca
11
'' ,
pentru orice ni ,1= şi mk ,1= , sau echivalent cu egalitatea matriceală
)(')( ',', 11TACCTA BBBB = .
Deoarece matricea de trecere de la o bază la alta este inversabilă, din ultima relaŃie obŃinem:
CTACTA BBBB )()'()( ',1
', 11
−= .
Corolarul 3.6: : Fie VVT →: un endomorfism al lui V, ,...,, 21 neeeB = şi
',...,','' 21 neeeB = baze ale lui V. Dacă C este matricea de trecere de la baza B la
baza 'B , atunci
CTACTA BB )()( 1'
−= .
DemonstraŃie: Evident dacă se aplică Teorema 3.5 pentru VV =' , BB =1 şi ''1 BB = . ExerciŃiu: Fie aplicaŃia
33: RR →T , ),,(),,( 213132321 xxxxxxxxxT +++= .
i) ArătaŃi că T este un automorfism;

106
ii) DeterminaŃi matricea asociată lui 1−T în baza canonică a lui 3R . SoluŃie: i) Se probează fară dificultate (similar ExerciŃiului din prima secŃiune
a acestui capitol) că T este transformare liniară. Deoarece spaŃiul vectorial pe care este definit T coincide cu spaŃiul în care T ia valori reiese că T este un endomorfism al lui
3R . Demonstrăm acum că T este aplicaŃie injectivă. Într-adevăr,
0)(/)( 33
RR =∈= xTxTKer . Considerând )(),,( 321 TKerxxxx ∈= , rezultă că
)0,0,0(),,( 321 =xxxT , de unde găsim sistemul omogen:
=+
=+
=+
0
0
0
21
31
32
xx
xx
xx
.
Deoarece determinantul coeficienŃilor sistemului este 02
011
101
110
≠= , sistemul va fi
compatibil determinat. Fiind un sistem omogen, unica soluŃie a acestuia este
=
=
=
0
0
0
3
2
1
x
x
x
,
deci 0)( 3R=TKer şi putem conchide astfel că T este aplicaŃie injectivă. Din
PropoziŃia 2.12 obŃinem acum că T este un automorfism al lui 3R . ii) Vom folosi Corolarul 3.3. Pentru aceasta, trebuie determinată mai întâi
matricea asociată lui T în baza canonică )1,0,0(),0,1,0(),0,0,1( 321 ==== eeeB a
lui 3R :
321 )1,0,0()0,1,0()1,1,0()0,0,1()( eeTeT +=+===
312 )1,0,1()0,1,0()( eeTeT +===
213 )0,1,1()1,0,0()( eeTeT +=== .
Rezultă că matricea asociată lui T în baza B este
=
011
101
110
)(TAB . În final găsim
că matricea asociată lui 1−T în baza B este
−
−
−
== −−
111
111
111
2
1))(()( 11 TATA BB .

107
4. ExerciŃii
1. StudiaŃi care dintre următoarele aplicaŃii sunt transformări liniare:
i) 22: RR →T , ),2(),( 212121 xxxxxxT +−= ;
ii) 22: RR →T , ( )2121 ,),( xxxxT −= ;
iii) RR →3:T , dcxbxaxxxxT +++= 321321 ),,( , unde R∈dcba ,,, ;
iv) )()(: RR mpnpAT MM → , ABBTA =)( , unde )(RmnA M∈ este o
matrice dată; v) ][][: XXT RR → , )("2)('3)())(( XPXPXPXPT +−= . 2. Pentru următoarele transformări liniare:
i) 23: RR →T , ),3(),,( 3231321 xxxxxxxT −+= ;
ii) 32: RR →T , )3,,(),( 2212121 xxxxxxxT −+= ;
iii) 33: RR →T , kxxT =)( , unde *R∈k ;
iv) ][][: 23 XXT RR → , )('3)())((1
02 XPdXXPXXPT −= ∫ ;
v) nnT RR →: , )...,...,,(),...,,( 2121121 nn xxxxxxxxxT ++++= ,
să se determine nucleul, imaginea şi să se verifice Teorema rang-defect.
3. Să se determine toate endomorfismele 33: RR →T care satisfac condiŃiile: )5,0,9()1,0,0(,)6,4,3()0,1,1(,)7,1,2()0,1,1( =−=−−= TTT .
4. Să se demonstreze că transformarea liniară
32: RR →T , )3,,(),( 2212121 xxxxxxxT −+= este injectivă, dar nu este surjectivă.
5. Să se demonstreze că aplicaŃia
33: VVT → , vavTrrr
×=)( ,
cu 3Va ∈r
dat, este transformare liniară. DeterminaŃi nucleul şi imaginea acestei
transformări.
6. Se consideră aplicaŃia ][][: 22 XXT RR → , )('))(( XXPXPT = .
i) Să se demonstreze că T este un automorfism;
ii) Să se determine matricea asociată lui T în baza ,,1 2XXB = .
7. Se consideră transformarea liniară 23: RR →T care pe elementele bazei
canonice a lui 3R este definită astfel: )4,3()0,0,1( =T , )1,7()0,1,0( =T , )1,8()1,0,0( =T . Să se determine matricea asociată transformării T în perechea de baze
)1,0,0(,)0,1,1(,)0,1,1(1 −=B şi )1,1(,)1,1(2 −=B .

108
8. Se consideră aplicaŃia
)()(: 22 RR MM →T ,
−−
−=
21
10
02
11)( XXXT .
i) Să se demonstreze că T este endomorfism al lui )(2 RM ; ii) Să se determine nucleul, precum şi o bază a acestuia; iii) Să se determine matricea ataşată lui T în baza
=
11
11,
01
11,
00
11,
00
01B .

109
Capitolul VI
Sisteme de ecuaŃii liniare
Metodele de rezolvare ale sistemelor de ecuaŃii liniare se împart în două
categorii: - metode directe: presupun obŃinerea soluŃiei exacte a sistemului după un
număr finit de operaŃii elementare; - metode iterative: se bazează pe folosirea unei aproximaŃii iniŃiale care se
îmbunătăŃeşte de la o etapă la alta.
1. Metoda lui Gauss
Prezentăm în această secŃiune cea mai simplă metodă directă de rezolvare a sistemelor de ecuaŃii liniare, numită Metoda lui Gauss sau Metoda eliminărilor succesive. Această metodă are la bază ideea transformării sistemului dat într-un sistem superior triunghiular sau trapezoidal prin eliminarea succesivă a necunoscutelor şi apoi folosirea procedeului de substituire inversă pentru rezolvarea sistemului obŃinut.
Considerăm un sistem de m ecuaŃii şi n necunoscute:
=+++
=+++
=+++
mnmnmm
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
S
...
...............................................
...
...
:)(
2211
22222121
11212111
.
Notăm cu
=
mnmm
n
n
aaa
aaa
aaa
A
...
............
...
...
21
22221
11211
şi
=
mmnmm
n
n
e
baaa
baaa
baaa
A
...
...............
...
...
21
222221
111211

110
matricea coeficienŃilor sistemului, respectiv matricea extinsă a sistemului. Putem presupune că fiecare coloană a matricea A este nenulă, în caz contrar sistemul (S) putându-se înlocui cu un sistem cu număr mai mic de necunoscute.
DefiniŃia 1.1: i) Spunem că sistemului (S) i s-a aplicat o transformare elementară de tipul ( I ) dacă sistemului i se permută două ecuaŃii, poziŃia celorlalte m-2 ecuaŃii rămânând nemodificată:
→
m
i
j
m
j
i
E
E
E
E
S
E
E
E
E
S
...
...
...
:)'(
...
...
...
:)(
1
)I(
1
Vom folosi notaŃia ji EE ↔ .
ii) Spunem că sistemului (S) i s-a aplicat o transformare elementară de tipul
( II ) dacă o ecuaŃie a sistemului se înmulŃeşte cu o constantă nenulă, celelalte m-1 ecuaŃii rămânând nemodificate:
→
m
i
m
i
E
E
E
S
E
E
E
S
...
...
:)'(
...
...
:)(
1
)II(
1
λ
Vom folosi notaŃia iEλ .
iii) Spunem că sistemului (S) i s-a aplicat o transformare elementară de tipul
( III ) dacă unei ecuaŃii a sistemului i se adună o altă ecuaŃie multiplicată cu o constantă nenulă, celelalte m-1 ecuaŃii rămânând nemodificate:
+
→
m
ij
i
m
j
i
E
EE
E
E
S
E
E
E
E
S
...
...
...
:)'(
...
...
...
:)(
1
)III(
1
λ
Vom folosi notaŃia ij EE λ+ .

111
DefiniŃia 1.2: Două sisteme de ecuaŃii elementare )(S şi )'(S se numesc
sisteme echivalente dacă sistemul )'(S se obŃine din sistemul )(S printr-un număr finit de transformări elementare de tipul ) I( , ) II( sau ) III( . Vom desemna acest
lucru prin notaŃia )'(~)( SS . ObservaŃie: RelaŃia “~” este o relaŃie de echivalenŃă pe mulŃimea sistemelor
de m ecuaŃii liniare şi cu n necunoscute. Teorema 1.3: Fie )(S şi )'(S două sisteme de m ecuaŃii liniare şi cu n
necunoscute. Dacă )(S şi )'(S sunt sisteme echivalente, atunci )(S şi )'(S au aceleaşi soluŃii.
DemonstraŃie: łinând cont de definiŃia sistemelor echivalente, precum şi de
observaŃia anterioară, ne putem reduce la cazul în care )'(S se obŃine din )(S printr-o singură transformare elementară de tipul ( I ), ( II ) sau ) III( . În acest caz este evident că orice soluŃie a sistemului )(S este soluŃie şi a sistemului )'(S .
Pe de altă parte, deoarece sistemul )(S se obŃine din sistemul )'(S printr-o transformare elementară de tipul ( I ), ( II ) sau ) III( , orice soluŃie a sistemului )'(S este soluŃie a sistemului )(S şi astfel teorema este demonstrată.
Teorema 1.4: Orice sistem )(S cu m ecuaŃii liniare şi n necunoscute este
echivalent cu un sistem )(S de forma:
=
=
=++
=++
=++
=++
+
n
r
rnrnkrk
nnkk
nnkk
nn
b
b
bxaxa
bxaxa
bxaxa
bxaxa
Srr
0
...........
0
....
........................
...............
..........................
.........................................
:)(
1
333
222
11111
33
22
unde 0...,,,,32 3211 ≠
rrkkk aaaa şi rkkk <<<< ...1 32 . )(S se va numi forma
triunghiulară a sistemului )(S .
DemonstraŃie: Deoarece prima coloană a matricei A este nenulă, atunci există
cel puŃin un element nenul pe această coloană. Fie i indicele minim cu proprietatea că 01 ≠ia . Dacă 1=i , atunci prima ecuaŃie a sistemului are coeficientul lui 1x nenul.
Dacă 1>i , atunci permutând între ele ecuaŃiile 1E şi iE obŃinem un sistem
echivalent cu sistemul iniŃial, având coeficientul lui 1x nenul în prima ecuaŃie.
Pentru orice indice 1>j , adunăm la ecuaŃia jE ecuaŃia 1E înmulŃită cu
11
1
a
a j− . ObŃinem sistemul:

112
=++
=++
=++
'''
'2
'2
'2
'1
'11
'11
........................
...............................................................
..........................
.........................................
:)'(
22
22
mnmnkmk
nnkk
nn
bxaxa
bxaxa
bxaxa
S
unde 0'11 ≠a , iar 12 >k este indicele minim pentru care cel puŃin unul dintre
coeficienŃii ''3
'2 222
,...,, mkkk aaa este nenul. Este clar că )(~)'( SS .
Se continuă aplicarea procedeului descris mai sus sistemului de m-1 ecuaŃii obŃinut din )'(S prin eliminarea primei ecuaŃii. Va rezulta un sistem de forma:
=++
=++
=++
=++
"""
"3
"3
"3
"2
"2
"2
'1
'11
'11
............
...................................................
..............
..........................
.........................................
:)"(
33
33
22
mnmnkmk
nnkk
nnkk
nn
bxaxa
bxaxa
bxaxa
bxaxa
S
unde 321 kk << şi cel puŃin unul dintre coeficienŃii ""3 33
...,, mkk aa este nenul.
Deoarece )'(~)"( SS , datorită tranzitivităŃii relaŃiei “~” obŃinem că )(~)"( SS . După un număr finit de aplicări ale procedeului descris anterior ajungem
la sistemul )(S , echivalent cu sistemul iniŃial )(S . ObservaŃie: 1. Sistemul )(S este compatibil dacă şi numai dacă în forma )(S
nu apar ecuaŃii de forma pb=0 , cu pb nenul.
2. În cazul în care sistemul )(S este compatibil, rezolvarea acestuia prin
metoda lui Gauss se face astfel: în forma )(S a sistemului, rkk xxx ...,,,
21 vor fi
necunoscute principale, iar celelalte rn − nedeterminate vor fi necunoscute secundare. Din ultima ecuaŃie
rnrnkrk bxaxarr
=++ ....
a sistemului )(S se determină rkx în funcŃie de necunoscutele secundare. Se va
înlocui această valoare în penultima ecuaŃie şi se determină 1−rkx . Continuând astfel,
în final vom obŃine 1x . Acest procedeu de aflare a necunoscutelor după ce sistemul a fost adus la forma triunghiulară este cunoscut sub numele de substituire inversă.
ExerciŃiul 1: Să se rezolve, cu ajutorul metodei lui Gauss, sistemul de ecuaŃii liniare:
−=+−++
=−++−
=−−+−
−=+−++
=−++
12
34
32
1223
1453
54321
54321
54321
54321
4321
xxxxx
xxxxx
xxxxx
xxxxx
xxxx

113
SoluŃie: Vom folosi algoritmul descris în demonstraŃia Teoremei 1.4 pentru a găsi forma triunghiulară a sistemul dat.
Cu ajutorul transformărilor elementare ( I ), ( II ) şi ) III( sistemul se poate scrie succesiv astfel:
−=+−++
=−++−
=−−+−
−=+−++
=−++
12
34
32
1223
1453
54321
54321
54321
54321
4321
xxxxx
xxxxx
xxxxx
xxxxx
xxxx
→−+
−+
−+
−+
15
14
13
12
)1(
)1(
)1(
)1(
EE
EE
EE
EE
−=++−−
=−+−−
=−+−−
−=++−
=−++
234
2547
2345
223
1453
5432
5432
5432
543
4321
xxxx
xxxx
xxxx
xxx
xxxx
→↔ 52 EE
−=++−
=−+−−
=−+−−
−=++−−
=−++
223
2547
2345
234
1453
543
5432
5432
5432
4321
xxx
xxxx
xxxx
xxxx
xxxx
→−+
−+
24
23
)7(
)5(
EE
EE
−=++−
=−−
=−−
−=++−−
=−++
223
1681624
1261216
234
1453
543
543
543
5432
4321
xxx
xxx
xxx
xxxx
xxxx
→4
3
8
12
1
E
E
−=++−
=−−
=−−
−=++−−
=−++
223
223
6368
234
1453
543
543
543
5432
4321
xxx
xxx
xxx
xxxx
xxxx
→↔ 43 EE
−=++−
=−−
=−−
−=++−−
=−++
223
6368
223
234
1453
543
543
543
5432
4321
xxx
xxx
xxx
xxxx
xxxx
→+
−+
35
34 3
8
EE
EE
=
=−−
=−−
−=++−−
=−++
003
2
3
1
3
2223
234
1453
54
543
5432
4321
xx
xxx
xxxx
xxxx
.

114
Putem acum să tragem următoarele concluzii: sistemul dat este compatibil nedeterminat, 4321 ,,, xxxx sunt necunoscute principale, iar 5x este necunoscută
secundară. Utilizând substituirea inversă găsim:
αααα
=−−==−−=−= 54321 ,2
1,0,2
1,2
xxxxx
cu R∈α .
ExerciŃiul 2: Folosind metoda lui Gauss să se rezolve sistemul:
=−+
=++
=−+
−=−+
132
3
122
13
321
321
321
321
xxx
xxx
xxx
xxx
SoluŃie: Utilizând transformările elementare, succesiv avem:
=−+
=++
=−+
−=−+
132
3
122
13
321
321
321
321
xxx
xxx
xxx
xxx
→−+
−+
−+
14
13
12
)1(
)1(
)2(
EE
EE
EE
=
=
=+−
−=−+
2
44
34
13
2
3
32
321
x
x
xx
xxx
→+ 24 EE
=
=
=+−
−=−+
24
44
34
13
3
3
32
321
x
x
xx
xxx
→−+ 34 )1( EE
−=
=
=+−
−=−+
20
44
34
13
3
32
321
x
xx
xxx
.
Deoarece forma triunghiulară a sistemului dat conŃine egalitatea imposibilă 20 −= , sistemul este incompatibil.
2. Factorizarea LU
În algebra liniară, prin factorizare a unei matrice se înŃelege scrierea matricei respective ca un produs de alte matrice, având anumite particularităŃi. Această secŃiune este dedicată factorizării LU, adică scrierii, în anumite condiŃii, a unei matrice pătratice sub forma unui produs dintre o matrice inferior triunghiulară (Lower triangular matrix) şi o matrice superior triunghiulară (Upper triangular matrix ).
DefiniŃia 2.1: 1. O matrice )()(
,1,RnnjiijlL M∈
== se numeşte matrice
inferior triunghiulară dacă 0=ijl pentru orice ji < , adică toate elementele situate

115
deasupra diagonalei principale sunt nule. Aşadar, o matrice inferior triunghiulară va fi de forma:
=
nnnnn llll
lll
ll
l
L
...
...............
0...
0...0
0...00
321
333231
2221
11
.
2. O matrice )()( ,1, RnnjiijuU M∈
== se numeşte matrice superior
triunghiulară dacă 0=iju pentru orice ji > , adică toate elementele situate sub
diagonala principală sunt nule. Aşadar, o matrice superior triunghiulară va fi de forma:
=
nn
n
n
n
u
uu
uuu
uuuu
U
...000
...............
...00
...0
...
333
22322
1131211
.
PropoziŃia 2.2: Matricele inferior (superior) triunghiulare au următoarele
proprietăŃi: 1. Suma şi produsul a două matrice inferior (superior) triunghiulare, de
aceeaşi dimensiune, sunt matrice inferior (superior) triunghiulare; 2. Determinantul unei matrice inferior (superior) triunghiulare este egal cu
produsul elementelor situate pe diagonala principală; 3. O matrice inferior (superior) triunghiulară este inversabilă dacă şi numai
dacă toate elementele situate pe diagonala principală sunt nenule; 4. Inversa unei matrice inferior (superior) triunghiulară, în cazul în care
există, este tot o matrice inferior (superior) triunghiulară. DemonstraŃie: 1. Evident, din DefiniŃia 2.1. 2. Se demonstrează prin metoda inducŃiei matematice după n, utilizând
dezvoltarea determinantului după o coloană (respectiv o linie). 3. Se obŃine imediat din punctul precedent al acestei propoziŃii, având în
vedere că o matrice pătratică este inversabilă dacă şi numai dacă matricea are determinantul nenul.
4. Fie
=
nnnnn llll
lll
ll
l
L
...
...............
0...
0...0
0...00
321
333231
2221
11
o matrice inferior triunghiulară, inversabilă şi )()( ,1,1 RnnjiijL M∈
=− = λ inversa
matricei L. Presupunem prin absurd că 1−L nu este matrice inferior triunghiulară.

116
Atunci în matricea 1−L există cel puŃin un element nenul situat deasupra diagonalei principale. Fie k indicele minim cu proprietatea că 0≠kjλ , cu jk < .
Deoarece nILL =⋅ −1 , elementul de pe poziŃia (k, j) din matricea unitate nI se
obŃine înmulŃind linia k din matricea L cu coloana j din matricea 1−L . Astfel obŃinem că 0=kjkkl λ , de unde rezultă 0=kkl - contradicŃie cu inversabilitatea matricei L.
Deci matricea 1−L este inferior triunghiulară. Similar se probează afirmaŃia pentru matrice superior triunghiulară. În continuare vom introduce noŃiunea de matrice inferior triunghiulară
elementară, concept deosebit de important pentru factorizarea LU. Fie
=+
n
kkc
γ
γ
...
0
...
0
1, )0...010...0(=ke
matricea coloană având 0 pe primele k poziŃii, respectiv matricea linie cu 1 pe poziŃia k şi 0 în rest.
DefiniŃia 2.3: Se numeşte matrice inferior triunghiulară elementară o matrice pătratică de forma
−
−
=−=
+
1...0...00
.....................
0...1...00
0...01...00
.....................
0...00...10
0...00...01
1
n
k
kknk ecIL
γ
γ
.
PropoziŃia 2.4: Matricea inferior triunghiulară elementară kL este
inversabilă, inversa ei fiind
=+=
+
−
1...0...00
.....................
0...1...00
0...01...00
.....................
0...00...10
0...00...01
1
1
n
k
kknk ecIL
γ
γ
.

117
DemonstraŃie: Deoarece matricea kL este o matrice inferior triunghiulară
având numai elemente nenule pe diagonala principală, din PropoziŃia 2.2 rezultă că
kL este matrice inversabilă.
Probăm acum că kkn ecI + este inversa matricei kL :
))(())(()( kkkknkknkknkknk ececIecIecIecIL −=+−=+ . (1)
Deoarece 0=kk ce , succesiv avem:
00)())(( === kkkkkkkkkk ececececec . (2)
Înlocuind relaŃia (2) în (1) obŃinem
nkknk IecIL =+ )( ,
de unde putem conchide că kknk ecIL +=−1 .
DefiniŃia 2.5: Pentru o matrice )()( ,1, RnnjiijaA M∈
== , determinanŃii
111 a=∆ , 2221
12112 aa
aa=∆ ,
333231
232221
131211
3
aaa
aaa
aaa
=∆ ,..., )(Adetn =∆
se numesc minori principali.
Lema 2.6: Presupunem că pentru matricea )(RnA M∈ există două matrice
)(, RnUL M∈ astfel încât
A=LU. Atunci pentru orice partiŃie
=
2221
1211
AA
AAA ,
=
2221
11 0
LL
LL ,
=
2221
1211
UU
UUU
cu )(,, 111111 RkULA M∈ , nk ≤ , avem 111111 ULA = .
DemonstraŃie: Prin calcul direct.
Teorema 2.7: Fie )()( ,1, RnnjiijaA M∈=
= o matrice pătratică pentru care
primii 1−n minori principali 121 ...,,, −∆∆∆ n sunt nenuli. Atunci matricea A admite o
factorizare LU, adică există o matrice inferior triunghiulară )(RnL M∈ şi o
matrice superior triunghiulară )(RnU M∈ astfel încât
A=LU.
DemonstraŃie: Pentru a demonstra această teoremă, vom construi matricele triunghiulare L şi U cu proprietatea că LUA = . Procedeul utilizat în acest scop va fi folosit şi în exerciŃiile având drept cerinŃă determinarea factorizării LU pentru o anumită matrice.
Deoarece 0111 ≠=∆ a , putem considera matricea inferior triunghiulară elementară

118
−
−
−
=
1...00
...............
0...10
0...01
0...001
11
1
11
31
11
21
1
a
a
a
aa
a
L
n
.
Definim ALA 11 = . Rezultă că
=
)1()1(2
)1(2
)1(22
)1(1
)1(12
)1(11
1
...0
............
...0
...
nnn
n
n
aa
aa
aaa
A .
Evident jj aa 1)1(
1 = , pentru orice nj ,1= .
Din PropoziŃia 2.4 rezultă că
==−
)1()1(2
)1(2
)1(22
)1(1
)1(12
)1(11
11
1
11
31
11
21
11
1
...0
............
...0
...
1...00
...............
0...10
0...01
0...001
nnn
n
n
naa
aa
aaa
a
a
a
aa
a
ALA . (3)
Folosind acum Lema 2.6 , din egalitatea precedentă obŃinem că
=
)1(
22
)1(12
)1(11
11
212221
1211
01
01
a
aa
a
aaa
aa, de unde, trecând la egalităŃile dintre determi-
nanŃi, avem: )1(22
)1(112 aa=∆ sau echivalent 0
1
2)1(22 ≠
∆
∆=a .
Astfel, putem considera în continuare matricea inferior triunghiulară elementară
−
−=
1...00
...............
0...10
0...010
0...001
)1(22
)1(2
)1(22
)1(32
2
a
a
a
a
L
n
şi apoi să definim

119
==
)2()2(3
)2(3
)2(33
)2(2
)2(23
)2(22
)2(1
)2(13
)2(12
)2(11
122
...00
...............
...00
...0
...
nnn
n
n
n
aa
aa
aaa
aaaa
ALA .
Evident, primele două linii ale matricelor 2A şi 1A coincid, iar
==−
)2()2(3
)2(3
)2(33
)2(2
)2(23
)2(22
)2(1
)2(13
)2(12
)2(11
)1(22
)1(2
)1(22
)1(32
21
21
...00
...............
...00
...0
...
1...00
...............
0...10
0...010
0...001
nnn
n
n
n
n aa
aa
aaa
aaaa
a
a
a
a
ALA (4)
Înlocuind relaŃia (4) în (3) obŃinem 21
21
1 ALLA −−= , de unde cu ajutorul Lemei 2.6
găsim:
=
)2(33
)2(23
)2(22
)2(13
)2(12
)2(11
)1(22
)1(32
11
31
11
21
333231
232221
131211
00
0
1
01
001
a
aa
aaa
a
a
a
a
a
a
aaa
aaa
aaa
.
Prin trecere la egalităŃile dintre determinanŃi rezultă că
)2(33
1
21
)2(33
)1(2211
)2(33
)2(22
)2(113 aaaaaaa
∆
∆∆===∆ şi astfel 0
2
3)2(33 ≠
∆
∆=a . Deci procedeul
poate fi continuat. În general, se consideră matricea inferior triunghiulară elementară
−
−=
−
−
−
−+
1...0...00
.....................
0...1...00
0...01...00
.....................
0...00...10
0...00...01
)1(,
)1(,
)1(,
)1(,1
kkk
kkn
kkk
kkkk
a
a
a
aL ,
cu ajutorul căreia se defineşte matricea

120
==
+
+++
+
+
+
−
)()(1,
)(,1
)(1,1
)()(1,
)(
)(2
)(1,2
)(2
)(22
)(1
)(1,1
)(1
)(12
)(11
1
...0...00
.....................
...0...00
......00
.....................
......0
......
knn
kkn
knk
kkk
kkn
kkk
kkk
kn
kk
kk
k
kn
kk
kk
kk
kkk
aa
aa
aaa
aaaa
aaaaa
ALA .
Este clar că primele k linii ale matricei kA coincid cu primele k linii ale matricei 1−kA
şi că ALLLA kkk 11...−= . În plus k
kkkka
∆
∆= +
++1)(
1,1 .
În final, după 1−n aplicări ale procedeului descris anterior, vom obŃine matricea superior triunghiulară
===
−
−−
−−−
−−−−−
)1(
)1(2
)1(22
)1(1
)1(12
)1(11
121211
...00
............
...0
...
...
nnn
nn
n
nn
nn
nnnnn
a
aa
aaa
ALLLALA . (5)
Notând matricea 1−nA cu U şi Ńinând cont că matricele kL sunt inversabile, pentru
orice 1,1 −= nk , din relaŃia (5) obŃinem
ULLLA n11
12
11 ... −
−−−= .
Dacă se notează 11
12
11 ... −
−−−
= nLLLL , atunci, din PropoziŃia 2.2, L este o matrice
inferior triunghiulară şi în plus LUA = .
ObservaŃii: 1. Ipoteza Teoremei 2.7 cu privire la minorii principali ai matricei A reprezintă o condiŃie suficientă, dar nu şi necesară pentru ca matricea A să admită o factorizare LU. Pentru a ilustra acest lucru vom considera matricea
=
31
00A .
Deşi 01 =∆ , este uşor de verificat că
=
20
11
11
00
31
00
reprezintă o factorizare LU a matricei A. 2. Nu orice matrice pătratică admite o factorizare LU. Într-adevăr, fie
matricea
=
01
10A .
Dacă A ar putea fi scrisă sub forma
==
22
1211
2212
11
0
0
u
uu
ll
lLUA ,

121
ar rezulta că 01111 =ul . Atunci, conform PropoziŃiei 2.2, cel puŃin una din matricele L şi U ar avea determinantul nul, contradicŃie cu )()(1)( UdetLdetAdet =−= .
ExerciŃiul 1: Să se studieze dacă matricea
−
−
=
502
680
121
A
admite factorizare LU şi în caz afirmativ să se determine o astfel de factorizare.
SoluŃie: Deoarece 011 ≠−=∆ şi 0880
212 ≠−=
−=∆ , din Teorema 2.7
rezultă că matricea A admite factorizare LU. Urmând paşii descrişi în demonstraŃia Teoremei 2.7 obŃinem succesiv
matricele:
−
=
102
010
001
1L ,
−
−
==
340
680
121
11 ALA ,
=
12
10
010
001
2L , UALA =
−
==
600
680
121
122 ,
−
=
−
==−−
12
12
010
001
12
10
010
001
102
010
0011
21
1 LLL .
Atunci
LUA =
−
−
=
−
−
=
600
680
121
12
12
010
001
502
680
121
.
Cu ajutorul factorizării LU putem transpune în limbaj matriceal metoda
eliminării a lui Gauss în cazul particular al sistemelor de ecuaŃii liniare având număr egal de ecuaŃii şi necunoscute şi pentru care matricea coeficienŃilor are minorii principali, eventual cu excepŃia ultimului, nenuli.
Considerăm sistemul
=+++
=+++
=+++
nnnnnn
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
...
...............................................
...
...
2211
22222121
11212111
. (6)

122
Notând
=
mnmm
n
n
aaa
aaa
aaa
A
...
............
...
...
21
22221
11211
,
=
nb
b
b
B...2
1
,
=
nx
x
x
X...
2
1
,
sistemul (6) este echivalent cu ecuaŃia matriceală BAX = . (7)
Presupunând că matricea A are primii 1−n minori principali nenuli, atunci din Teorema 2.7 există o matrice inferior triunghiulară )(RnL M∈ şi o matrice
superior triunghiulară )(RnU M∈ astfel încât LUA = . EcuaŃia (7) este astfel
echivalentă cu ecuaŃia matriceală BLUX = , ecuaŃia care corespunde rezolvării a două sisteme triunghiulare:
BLY = şi YUX = . (8) În concluzie, pentru a afla soluŃia sistemului (7), se rezolvă mai întâi sistemul BLY = (cu matricea coeficienŃilor L inferior triunghiulară) şi apoi se trece la rezolvarea sistemului YUX = (cu matricea coeficienŃilor U superior triunghiulară).
ExerciŃiul 2: Să se rezolve sistemul:
−=+−
=+
=++−
1152
1068
02
31
32
321
xx
xx
xxx
.
SoluŃia: Conform calculelor din ExerciŃiul 1, matricea A a coeficienŃilor
sistemului admite următoarea factorizare LU:
LUA =
−
−
=
−
−
=
600
680
121
12
12
010
001
502
680
121
.
Aşa cum s-a văzut anterior, soluŃia sistemului dat se poate obŃine rezolvând succesiv sistemele triunghiulare:
−=+−
=
=
112
12
10
0
321
2
1
yyy
y
y
şi
=
=+
=++−
33
232
1321
6
68
2
yx
yxx
yxxx
.
ObŃinem imediat: 6,10,0 321 −=== yyy şi respectiv 1,2,3 321 −=== xxx .

123
3. Factorizarea Cholesky
DefiniŃia 3.1: Spunem că o matrice )(RnA M∈ admite factorizare Cholesky
dacă există o matrice inferior triunghiulară )(RnK M∈ , inversabilă, cu
proprietatea că tKKA = . (1)
Presupunând că matricea A admite o factorizare Cholesky, din relaŃia (1) şi din
proprietăŃile matricei transpuse obŃinem:
AKKKKKKA ttttttt ==== )()( , ceea ce arată că A este o matrice simetrică. Deducem deci: pentru ca matricea A să admită factorizare Cholesky avem condiŃia necesară ca A să fie matrice simetrică. În cele ce urmează, vom stabili condiŃii necesare şi suficiente pentru ca matricea A să admită factorizare Cholesky.
DefiniŃia 3.2: O matrice )(RnA M∈ se numeşte matrice pozitiv definită dacă
0>txAx ,
pentru orice vector nenul nx R∈ .
PropoziŃia 3.3: Dacă )(RnA M∈ este o matrice pozitiv definită, atunci toŃi
minorii ei principali n∆∆∆ ...,,, 21 sunt nenuli.
DemonstraŃie: Presupunem prin absurd că există ,...,2,1 nk ∈ astfel încât
0=∆k . În acest caz putem găsi un vector nenul kkxxx R∈),...,,( 21 cu proprietatea
că
k
kkkk
k
k
k
aaa
aaa
aaa
xxxR
0
...
............
...
...
)...(
21
22221
11211
21 =
.
Considerăm vectorul nkxxxx R∈= )0,...,0,,...,,( 21 . Evident x este un vector nenul şi
nk
nnknnknn
nkkkkkkk
knkkkkkk
nkk
nkk
kt x
x
x
aaaaa
aaaaa
aaaaa
aaaaa
aaaaa
xxxxAxR
0
0
...
0
...
......
.....................
......
......
.....................
......
......
)0...0...(
2
1
1,21
,11,1,12,11,1
1,21
21,222221
11,111211
21 =
=
+
++++++
+
+
+

124
în contradicŃie cu faptul că matricea A este pozitiv definită. Deci toŃi minorii principali ai matricei A sunt nenuli.
Din propoziŃia anterioară şi din Teorema 2.7 obŃinem imediat următorul rezultat:
Corolarul 3.4: O matrice pozitiv definită admite factorizare LU.
Teorema 3.5: O matrice )(RnA M∈ admite factorizare Cholesky dacă şi
numai dacă A este matrice simetrică şi pozitiv definită.
DemonstraŃie: Presupunem mai întâi că A este simetrică şi pozitiv definită. Din Corolarul 3.4 obŃinem existenŃa unei matrice inferior triunghiulare L şi a unei matrice superior triunghiulare U astfel încât LUA = . Datorită simetriei matricei avem:
ttt LUAALU === . (2) Din PropoziŃia 3.3, 0)( ≠Adet , ceea ce implică inversabilitatea matricelor L şi U. Astfel, din relaŃia (2) obŃinem
tt ULLU 11)( −− = . În membrul stâng al acestei egalităŃi avem o matrice superior triunghiulară, pe când în membrul drept avem o matrice inferior triunghiulară. Aşadar
tt ULLUD 11)( −− ==
este o matrice diagonală. Rezultă că tDLU = şi tLDLA = . (3)
Vom demonstra acum că D este matrice pozitiv definită: într-adevăr, din
relaŃia (3) avem 11 )( −−= tLALD . Considerând un vector nx R∈ pentru care tttt xLAxLxLAxLxDx )()(0 1111 −−−− ==≥ , obŃinem nxL
R01 =− , de unde nx
R0= ,
ceea ce arată că D este matrice pozitiv definită. D fiind matrice diagonală, va avea forma
=
nd
d
d
D
...00
............
0...0
0...0
2
1
.
Pentru orice ni ≤≤1 considerăm vectorul nie R∈= )0,...,0,1,0,...,0( având 1 pe
poziŃia i şi 0 în rest. După cum am demonstrat anterior, D este pozitiv definită, deci
itii deDe =<0 . Putem astfel defini matricea
)(
...00
............
0...0
0...0
2
1
Rn
nd
d
d
LK M∈
⋅= .
Din relaŃia (3) se obŃine că tKKA = . Cum matricea K este evident inferior triunghiulară şi inversabilă, putem conchide că A admite factorizare Cholesky.

125
Reciproc, dacă A admite factorizare Cholesky, atunci există )(RnK M∈
inferior triunghiulară şi inversabilă astfel încât tKKA = . Aşa cum am arătat la începutul acestei secŃiuni, rezultă că A este o matrice simetrică.
Considerăm acum vectorul nnxxxx R∈= ),...,,( 21 . ObŃinem:
tttt xKxKxxKKxAx ))((== (4) Notând vectorul xK cu y şi presupunând că acesta are componentele
),...,,( 21 nyyyy = , din relaŃia (4) rezultă:
0... 222
21 ≥+++== n
tt yyyyyxAx ,
cu egalitate dacă şi numai dacă 0...21 ==== nyyy , sau echivalent nxR
0=
(deoarece K este matrice inversabilă). Astfel, 0>txAx pentru orice 0\ nnx
RR∈ ,
ceea ce înseamnă că A este matrice pozitiv definită.
Finalul acestei secŃiuni este dedicat determinării descompunerii Cholesky, în ipotezele Teoremei 3.5. Presupunând că matricea K are componentele ijk , egalitatea
matriceală tKKA = se poate rescrie sub forma:
=
nn
n
n
nnnnnnnn
n
n
k
kk
kkk
kkk
kk
k
aaa
aaa
aaa
...00
............
...0
...
...
............
0...
0...0
...
............
...
...
222
12111
21
2221
11
21
22212
11211
.
ÎnmulŃind succesiv prima linie a matricei K cu coloanele matricei tK obŃinem:
nn akkakkak 111112211111211 ,...,, ===
de unde găsim elementele de pe prima coloană a matricei K:
11
11
11
12211111 ,...,,
k
ak
k
akak n
n === .
Prin înmulŃirea celei de-a doua linii a matricei K cu ultimele 1−n coloane ale
matricei tK obŃinem:
nnn akkkkakkkkakk 2222121233222312122222
221 ,...,, =+=+=+ ,
de unde rezultă elementele nenule de pe a doua coloană a matricei K:
22
12122
22
31212332
2212222 ,...,,
k
kkak
k
kkakkak nn
n−
=−
=−= .
Procedând astfel, vom obŃine formulele pentru determinarea elementelor nenule ale matricei K:
nikaki
pipiiii ,1,
1
1
2 =−= ∑−
=
(5)
ijk
kka
kii
i
pjpipij
ji >
−
=
∑−
=,
1
1 (6)

126
ExerciŃiu: StudiaŃi dacă matricea
=
83213
21132
321
A
admite factorizare Cholesky, iar în caz afirmativ determinaŃi această factorizare.
SoluŃie: Evident, A este matrice simetrică. Vom demonstra că A este matrice
pozitiv definită: fie 3321 ),,( R∈= xxxx . Atunci:
=+++++=
= 32312123
22
21
3
2
1
321 42648313
83213
21132
321
)( xxxxxxxxx
x
x
x
xxxxAx t
049)53()32( 23
232
2321 ≥+++++ xxxxxx ,
cu egalitate dacă şi numai dacă
=
=+
=++
07
053
032
3
32
321
x
xx
xxx
sau echivalent 0321 === xxx .
Aşadar am obŃinut că 0>txAx , pentru orice vector nenul 3R∈x , ceea ce probează că matricea A este pozitiv definită. În consecinŃă, din Teorema 3.5, matricea A admite factorizare Cholesky.
Cu ajutorul formulelor (5) şi (6) determinăm elementele nenule ale matricei K:
31
3,2
1
2,1
11
1331
11
12211111 ========
k
ak
k
akak
53
621,3413
22
31212332
2212222 =
−=
−==−=−=
k
kkakkak
725983232
2313333 =−−=−−= kkak ,
deci
=
753
032
001
K .
ObservaŃie: Pentru a demonstra că o anumită matrice este simetrică şi pozitiv definită se poate folosi următorul rezultat (ce va fi demonstrat în Capitolul IX):
Criteriul lui Sylvester: O matrice simetrică este pozitiv definită dacă şi numai
dacă toŃi minorii principali ai matricei sunt strict pozitivi. Astfel, în cazul exerciŃiului anterior, deoarece
0441)(,09132
21,01 321 >==∆>==∆>=∆ Adet
putem afirma că A este matrice pozitiv definită.

127
4. Metode iterative de rezolvare ale sistemelor de ecuaŃii liniare
Considerăm sistemul de ecuaŃii liniare
=+++
=+++
=+++
nnnnnn
nn
nn
bxaxaxa
bxaxaxa
bxaxaxa
...
...............................................
...
...
2211
22222121
11212111
. (1)
Cu notaŃiile:
=
nnnn
n
n
aaa
aaa
aaa
A
...
............
...
...
21
22221
11211
,
=
nx
x
x
X...
2
1
,
=
nb
b
b
B...2
1
sistemul (1) este echivalent cu ecuaŃia matriceală BAX = . (2)
Vom descompune matricea A sub forma MCA −= , unde C este o matrice
inversabilă pentru care 1−C se poate calcula uşor (de exemplu, C este matrice diagonală sau matrice triunghiulară). RelaŃia (2) conduce la
BMXCX += , sau echivalent
BCMXCX 11 −− += .
Dacă notăm MCA 1~ −= şi BCB 1~ −= , obŃinem egalitatea
BXAX~~
+= .
Cu ajutorul acestei relaŃii vom construi recurent un şir de vectori N∈kkX )(
din nR astfel:
BXAX kk ~~ )()1( +=+ . (3) În cele ce urmează vom stabili anumite condiŃii în care şirul de vectori
N∈kkX )( “tinde” către soluŃia exactă *X a sistemului (1). În DefiniŃia 1.5 din
Capitolul IV s-a introdus noŃiunea de normă a unui vector într-un spaŃiu vectorial. Acest concept poate fi extins pentru matrice:
DefiniŃia 4.1: O aplicaŃie
RR →⋅ )(: nM
care verifică relaŃiile: 1. 0≥A , pentru orice )(RnA M∈ , cu egalitate dacă şi numai dacă nA 0= ;
2. BABA +≤+ , pentru orice )(, RnBA M∈ ;
3. AA λλ = , pentru orice )(RnA M∈ şi R∈λ ;
4. BABA ≤ , pentru orice )(, RnBA M∈
se numeşte normă matricială.

128
Fie ⋅ o normă pe spaŃiul vectorial nR . Pentru orice matrice )(RnA M∈
definim AxA
xi 1max
== .
Deoarece Axy
yAAy
yy
Ay
xyyy 1000maxmax
1maxmax
=≠≠≠=== , am obŃinut că
x
AxAxA
xxi 01maxmax
≠=== .
Lema 4.2: În contextul şi cu notaŃiile anterioare, avem:
xAAxi
≤ ,
pentru orice )(RnA M∈ şi nx R∈ .
DemonstraŃie: Dacă nx
R0= , atunci evident 0== xAAx
i.
Pe de altă parte, deoarece x
Ax
y
AyA
yi≥=
≠0max , pentru orice
0\ nnx
RR∈ , lema este complet demonstrată.
PropoziŃia 4.3: Dacă ⋅ este o normă pe spaŃiul vectorial nR , atunci
aplicaŃia RR →⋅ )(: niM , AxA
xi 1max
== este o normă matricială.
DemonstraŃie: Evident, aplicaŃia
i⋅ verifică primele trei axiome din
DefiniŃia 4.1, deoarece norma ⋅ satisface condiŃiile similare.
Având în vedere definirea aplicaŃiei i
⋅ , precum şi Lema 4.2, succesiv avem:
iiiixixxxiBAxBABxABxAxABAB =≤≤==
==== 1111maxmax)(max)(max
ceea ce probează şi ultima axiomă din DefiniŃia 4.1.
DefiniŃia 4.4: Norma matricială i
⋅ construită în PropoziŃia 4.3 se numeşte
normă matricială indusă de norma ⋅ .
ObservaŃie: În cazul în care se consideră normele RR →⋅⋅∞
n:,1
,
definite prin:
knk
xx,1
max=∞
= , ,1
1 ∑=
=n
kkxx
atunci normele matriciale induse vor fi:
∑=≤≤∞
=n
jij
niaA
11max , ∑
=≤≤=
n
iij
njaA
111max .

129
Teorema 4.5: Dacă 1~
<∞
A , atunci sistemul de ecuaŃii (1) este compatibil
determinat, iar şirul de vectori N∈kkX )( definit prin relaŃia de recurenŃă
BXAX kk ~~ )()1( +=+ converge în spaŃiul normat nR , relativ la norma ∞
⋅ , către
soluŃia exactă *X a sistemului (1). DemonstraŃie: Pentru a demonstra că sistemul (1) este compatibil determinat
vom arăta mai întâi că matricea AIn~
− este inversabilă. Presupunem prin absurd că
AIn~
− nu este inversabilă. Atunci există un vector nenul nX R∈ astfel încât
nXAIn R0)
~( =− ,
sau echivalent XAX~
= . Trecând la normă în ultima relaŃie şi utilizând Lema 4.2, obŃinem
∞∞∞∞≤= XAXAX
~~,
de unde găsim ∞
≤ A~
1 , contradicŃie. Deci presupunerea făcută este falsă şi astfel
matricea AIn~
− este inversabilă.
La începutul acestei secŃiuni s-a arătat că sistemul (1) este echivalent cu
BXAX~~
+= şi deci cu sistemul
BXAIn~
)~
( =− .
Cum matricea AIn~
− este inversabilă, atunci sistemul anterior este compatibil
determinat, ceea ce demonstrază că sistemul (1) este compatibil determinat.
Deoarece *X este soluŃia exactă a sistemului (1), atunci
BXAX~~ ** += . (4)
Pe de altă parte, din relaŃia de recurenŃă (3) a şirului N∈kkX )( avem
BXAX~~ )0()1( += . (5)
Scăzând relaŃia (4) din (5), obŃinem
)(~ *)0(*)1( XXAXX −=− .
Similar, deoarece BXAX~~ )1()2( += , vom găsi
)(~
)(~ *)0(2*)1(*)2( XXAXXAXX −=−=− .
Utilizând metoda inducŃiei matematice se demonstrează că
)(~ *)0(*)( XXAXX kk −=− , (6)
pentru orice N∈k . Prin trecere la norma ∞
⋅ în relaŃia (6), vom avea:
∞∞∞∞∞∞−≤−≤−=− *)0(*)0(*)0(*)( ~~
)(~
XXAXXAXXAXXkkkk .
Cum 1~
<∞
A , rezultă că
0lim *)( =−∞∞→
XX k
k
şi astfel teorema este complet demonstrată.

130
În final, vom prezenta două dintre cele mai cunoscute metode iterative de rezolvare a sistemelor de ecuaŃii liniare: metoda Jacobi şi metoda Gauss-Seidel.
Metoda Jacobi În contextul general descris anterior în această secŃiune, se consideră
=
nna
a
a
C
...00
............
0...0
0...0
22
11
şi
−=
0...
............
...0
...0
21
221
112
nn
n
n
aa
aa
aa
M .
Presupunând că 0≠iia , pentru orice ni ,1= , rezultă că
−−
−−
−−
== −
0...
............
...0
...0
~
21
22
2
22
21
11
1
11
12
1
nn
n
nn
n
n
n
a
a
a
a
a
a
a
aa
a
a
a
MCA şi
== −
nn
n
a
b
a
ba
b
BCB
...
~22
2
11
1
1
Dacă vectorii din şirul N∈kkX )( au componentele
=
)(
)(2
)(1
)(
...k
n
k
k
k
x
x
x
X , notând ii
ijij a
aa −=~
şi ii
ii a
bb =~
, atunci relaŃia de recurenŃă (3) este echivalentă cu sistemul de iteraŃii:
++++=
++++=
++++=
−−+
+
+
nk
nnnk
nk
nk
n
knn
kkk
knn
kkk
bxaxaxax
bxaxaxax
bxaxaxax
~~...~~......................................................................
~~...~~
~~...~~
)(11,
)(22
)(11
)1(
2)(
2)(
323)(
121)1(
2
1)(
1)(
313)(
212)1(
1
(7)
Aşadar, din Teorema 4.5, obŃinem că, dacă 1~
<∞
A , atunci sistemul de iteraŃii (7)
furnizează un şir de vectori din nR care tinde către soluŃia exactă a sistemului (1). Deoarece
++++++==−
=≤≤∞∑
nn
nn
nn
n
nn
nnn
jij
ni a
a
a
a
a
a
a
a
a
a
a
aaA 1,21
11
1
11
13
11
12
11...,...,...max~max
~,
condiŃia 1~
<∞
A este echivalentă cu sistemul de relaŃii
+++>
+++>
+++>
−1,21
2232122
1131211
...
..........................................
...
...
nnnnnn
n
n
aaaa
aaaa
aaaa
. (8)

131
DefiniŃia 4.6: O matrice )(RnA M∈ ale cărei componente satisfac sistemul
de relaŃii (8) se numeşte matrice diagonal dominantă. Din Teorema 4.5 şi din cele prezentate mai sus se obŃine următorul rezultat:
Teorema 4.7: Dacă matricea A este diagonal dominantă, atunci sistemul de ecuaŃii (1) este compatibil determinat. Mai mult, sistemul de iteraŃii (7) furnizează
componentele unui şir de vectori N∈kkX )( convergent către soluŃia exactă a
sistemului (1).
ObservaŃii: 1. Presupunerea că 0≠iia , pentru orice ni ,1= , sub care s-a
făcut raŃionamentul metodei Jacobi este evident îndeplinită dacă A este matrice diagonal dominantă.
2. Pentru a determina vectorii şirului N∈kkX )( este necesar să cunoaştem
vectorul )0(X , cunoscut sub numele de vector de iniŃializare. Dacă într-un exerciŃiu nu se precizează explicit acest vector, se poate considera vectorul nul ca vector de iniŃializare.
ExerciŃiul 1: Utilizând metoda lui Jacobi, să se calculeze trei iteraŃii pentru aproximarea soluŃiei sistemului
=++−
−=++
=+−
7113
35
1027
321
321
321
xxx
xxx
xxx
.
Se va utiliza vectorul de iniŃializare
=
0
0
0)0(X .
SoluŃie: Verificăm mai întâi că ne situăm în condiŃiile de aplicabilitate ale Teoremei 4.7: evident, sistemul dat este un sistem de ecuaŃii liniare, având acelaşi număr de ecuaŃii şi necunoscute. Mai mult, deoarece
+−>
+>
+−>
3111
115
217
,
matricea sistemului dat este diagonal dominantă. Sistemul dat poate fi pus sub forma
+−=
−−−=
+−=
11
7
11
3
11
15
3
5
1
5
17
10
7
2
7
1
213
312
321
xxx
xxx
xxx
.
Aşadar, sistemul de iteraŃii (7) corespunzător sistemului dat va fi

132
+−=
−−−=
+−=
+
+
+
11
7
11
3
11
15
3
5
1
5
17
10
7
2
7
1
)(2
)(1
)1(3
)(3
)(1
)1(2
)(3
)(2
)1(1
kkk
kkk
kkk
xxx
xxx
xxx
.
Prima iteraŃie se obŃine pentru 0=k :
=+−=
−=−−−=
=+−=
11
7
11
7
11
3
11
15
3
5
3
5
1
5
17
10
7
10
7
2
7
1
)0(2
)0(1
)1(3
)0(3
)0(1
)1(2
)0(3
)0(2
)1(1
xxx
xxx
xxx
.
Pentru 1=k avem cea de-a doua iteraŃie:
=+−=
−=−−−=
=+−=
385
358
11
7
11
3
11
177
78
5
3
5
1
5
1385
447
7
10
7
2
7
1
)1(2
)1(1
)2(3
)1(3
)1(1
)2(2
)1(3
)1(2
)2(1
xxx
xxx
xxx
.
A treia iteraŃie se obŃine pentru 2=k :
=+−=
−=−−−=
=+−=
55
56
11
7
11
3
11
155
56
5
3
5
1
5
155
56
7
10
7
2
7
1
)2(2
)2(1
)3(3
)2(3
)2(1
)3(2
)2(3
)2(2
)3(1
xxx
xxx
xxx
.
S-au obŃinut astfel primii trei vectori (exceptând vectorul de iniŃializare )0(X )
ai şirului N∈kkX )( :
−≈
−=
6363,0
6,0
4285,1
11
75
37
10
)1(X ;
−≈
−=
9298,0
0129,1
161,1
385
35877
78385
447
)2(X ;
−≈
−=
0181,1
0181,1
0181,1
55
5655
5655
56
)3(X .
SoluŃia exactă a sistemului fiind
−=
1
1
1*X , observăm că 0lim *)( =−
∞∞→XX k
k.

133
Metoda Gauss-Seidel Această metodă foloseşte descompunerea matricei A sub forma MCA −= cu
=
nnnn aaa
aa
a
C
...
............
0...
0...0
21
2221
11
şi
−=
0...00
............
...00
...0
2
112
n
n
a
aa
M .
În acest caz, vom considera şirul N∈kkX )( de vectori din nR definit prin relaŃia de
recurenŃă
BMXCX kk +=+ )()1( . )8(
Presupunem că 0≠iia , pentru orice ni ,1= . Dacă
=
)(
)(2
)(1
)(
...k
n
k
k
k
x
x
x
X , notând ii
ijij a
aa −=~
şi ii
ii a
bb =~
, atunci relaŃia de recurenŃă (8) este echivalentă cu sistemul de iteraŃii:
++++=
++++=
++++=
+−−
+++
++
+
nk
nnnk
nk
nk
n
knn
kkk
knn
kkk
bxaxaxax
bxaxaxax
bxaxaxax
~~...~~........................................................................
~~...~~
~~...~~
)1(11,
)1(22
)1(11
)1(
2)(
2)(
323)1(
121)1(
2
1)(
1)(
313)(
212)1(
1
(9)
Se poate demonstra că are loc următorul rezultat:
Teorema 4.8: Dacă matricea A este diagonal dominantă, atunci sistemul de
ecuaŃii (1) este compatibil determinat, iar sistemul de iteraŃii (9) furnizează
componentele unui şir de vectori N∈kkX )( convergent către soluŃia exactă a
sistemului (1). ExerciŃiul 2: Cu ajutorul metodei Gauss-Seidel, să se calculeze trei iteraŃii
pentru aproximarea soluŃiei sistemului
=++−
−=++
=+−
7113
35
1027
321
321
321
xxx
xxx
xxx
.
Se va utiliza vectorul de iniŃializare
=
0
0
0)0(X .
SoluŃie: Ca la ExerciŃiul 1, se arată mai întâi că matricea sistemului este
diagonal dominantă. Sistemul de iteraŃii (9) corespunzător este
134
+−=
−−−=
+−=
+++
++
+
11
7
11
3
11
15
3
5
1
5
17
10
7
2
7
1
)1(2
)1(1
)1(3
)(3
)1(1
)1(2
)(3
)(2
)1(1
kkk
kkk
kkk
xxx
xxx
xxx
Prima iteraŃie se obŃine pentru 0=k :
=+−=
−=−−−=
=+−=
385
388
11
7
11
3
11
135
31
5
3
5
1
5
17
10
7
10
7
2
7
1
)1(2
)1(1
)1(3
)0(3
)1(1
)1(2
)0(3
)0(2
)1(1
xxx
xxx
xxx
.
Pentru 1=k avem cea de-a doua iteraŃie:
=+−=
−=−−−=
=+−=
404
405
11
7
11
3
11
11142
1147
5
3
5
1
5
1922
935
7
10
7
2
7
1
)1(2
)1(1
)2(3
)1(3
)1(1
)2(2
)1(3
)1(2
)2(1
xxx
xxx
xxx
.
A treia iteraŃie se obŃine pentru 2=k :
=+−=
−=−−−=
=+−=
16999
16998
11
7
11
3
11
14374
4375
5
3
5
1
5
1750
749
7
10
7
2
7
1
)2(2
)2(1
)3(3
)2(3
)2(1
)3(2
)2(3
)2(2
)3(1
xxx
xxx
xxx
.
Astfel, vectorii obŃinuŃi în urma acestor iteraŃii vor fi:
−≈
−=
0077,1
8857,0
4285,1
385
38835
317
10
)1(X ;
−≈
−=
0024,1
0043,1
0141,1
404
4051142
1147922
935
)2(X ;
−≈
−=
9999,0
0002,1
9986,0
16999
169984374
4375750
749
)3(X .
ObservaŃie: Comparând rezultatele obŃinute prin metoda Jacobi şi prin
metoda Gauss-Seidel în ExerciŃiile 1 şi respectiv 2, se observă că în cazul ultimei metode avem o aproximare mai precisă a soluŃiei exacte a sistemului. De menŃionat că, deşi se întâmplă frecvent, aceasta nu este însă o regulă generală.
Dezavantajul metodei Gauss-Seidel constă însă într-un volum mai mare de calcule.

135
5. ExerciŃii
1. UtilizaŃi metoda lui Gauss pentru a rezolva sistemele de ecuaŃii:
a)
=−+
=−+
=++
0563
1342
9
321
321
321
xxx
xxx
xxx
b)
=++
=++
=++
0223
02
0
321
321
321
xxx
xxx
xxx
c)
=+−+
−=++−
−=+++
=++−
65
343
222
03
4321
4321
4321
4321
xxxx
xxxx
xxxx
xxxx
d)
=+
=+
=+−
=−+
5
204
022
10
31
32
321
321
xx
xx
xxx
xxx
2. Cu ajutorul metodei lui Gauss să se determine ce condiŃii satisfac γβα ,,
astfel încât sistemul:
=+
=++
=++
γ
β
α
31
321
321
8
352
32
xx
xxx
xxx
să fie compatibil. 3. Să se studieze dacă matricele
a)
−
−
−
1014
352
963
b)
−−
−−
−
−−
12559
5046
0153
2273
admit factorizare LU şi în caz afirmativ să se determine această descompunere.
4. Să se rezolve sistemul
=+−
=−−
=+−
458
026
122
321
31
321
xxx
xx
xxx
,
utilizând în prealabil factorizarea LU a matricei coeficienŃilor sistemului.
5*. Fie matricea
=
43
332
221
11
00
0
0
00
βα
γβα
γβα
γβ
A .
i) Presupunând că matricea A admite factorizare LU, să se verifice că aceasta este dată de:

136
=
100
010
001
0001
3
3
2
2
1
1
π
απ
απ
α
L şi
=
4
33
22
11
000
00
00
00
π
γπ
γπ
γπ
U ,
unde 11 βπ = şi i
iiii
π
γαβπ −= ++ 11 , 3,1=i .
ii) AplicaŃi punctul i) pentru a determina factorizarea LU a matricei
−
−−
−−
−
3100
1310
0131
0013
.
(Remarcă: O matrice de forma lui A se numeşte matrice tridiagonală. Factorizarea indicată la punctul i) este valabilă pentru orice matrice tridiagonală, indiferent de dimensiunea ei.)
6*. Fie )()(
,1,RnnjiijaA M∈
== o matrice şi pentru orice ,...,2,1 nk ∈
notăm )()( ,1, Rkkjiijk aA M∈=
= submatricele principale ale lui A. Atunci A este
pozitiv definită dacă şi numai dacă kA pozitiv definită, pentru orice ,...,2,1 nk ∈ .
7. Fie )()(
,1,RnnjiijaA M∈
== o matrice simetrică şi pozitiv definită. Atunci
2ijjjii aaa ≥ , cu egalitate dacă şi numai dacă ji = .
8. Să se studieze dacă următoarele matrice:
a)
27123
1282
321
b)
−
−
2696
9102
624
admit factorizare Cholesky şi în caz afirmativ găsiŃi această descompunere.
9. Să se rezolve sistemul
=+−
−=−+−
=+−
18936
632
1669
321
321
321
xxx
xxx
xxx
,
utilizând în prealabil factorizarea Cholesky a matricei coeficienŃilor sistemului. 10. Cu ajutorul metodei Jacobi, să se calculeze trei iteraŃii pentru aproximarea
soluŃiei sistemului
=++−
−=++
=−+
1720
1215
1810
321
321
321
xxx
xxx
xxx

137
Se va utiliza vectorul nul ca vector de iniŃializare.
11. Cu ajutorul metodei Gauss, să se calculeze trei iteraŃii pentru aproximarea soluŃiei sistemului
=++−
−=++
=−+
1720
1215
1810
321
321
321
xxx
xxx
xxx
Se va utiliza vectorul nul ca vector de iniŃializare. ComparaŃi rezultatele cu cele obŃinute la ExerciŃiul 10.
138
Capitolul VII
Valori proprii şi vectori proprii
Pe tot parcursul acestui capitol, K va desemna corpul numerelor reale R sau corpul numerelor complexe C , iar V un spaŃiu vectorial peste corpul K.
1. Valori proprii şi vectori proprii
DefiniŃia 1.1: Fie VVT →: un endomorfism al lui V. Un scalar K∈λ se numeşte valoare proprie a lui T dacă există un vector nenul Vv ∈ astfel încât:
vvT λ=)( În acest caz, vectorul v se numeşte vector propriu asociat valorii proprii λ .
MulŃimea tuturor valorilor proprii ale endomorfismului T se numeşte spectrul lui T şi se notează Spec(T).
Pentru o valoare proprie λ a transformării liniare T, vom nota .)(/)( vvTVvSvp λλ =∈=
Evident )(λSvp este mulŃimea formată din toŃi vectorii proprii asociaŃi valorii proprii λ , la care se adaugă vectorul nul.
DefiniŃia 1.2: Fie VVT →: un endomorfism al lui V şi S un subspaŃiu vectorial al lui V. Vom spune că S este subspaŃiu invariant al lui V relativ la T dacă
SST ⊆)(
PropoziŃia 1.3: Dacă λ este o valoare proprie a transformării liniare VVT →: , atunci )(λSvp este un subspaŃiu invariant al lui V relativ la T, denumit
subspaŃiul vectorilor proprii asociaŃi valorii proprii λ . DemonstraŃie: Arătăm mai întâi că )(λSvp este un subspaŃiu vectorial al lui
V. Fie )(, λSvpvu ∈ şi K∈βα , , arbitari aleşi. Atunci: )()()()()()()()( vuvuvuvTuTvuT βαλλβλαλβλαβαβα +=+=+=+=+ , deci )(λβα Svpvu ∈+ , adică )(λSvp este subspaŃiu vectorial al lui V.
139
Demonstrăm acum invarianŃa subspaŃiului )(λSvp relativ la T. Dacă )(λSvpv ∈ , atunci ,)( vvT λ= deci )()())(( vTvTvTT λλ == , de unde ).()( λSvpvT ∈
Aşadar )(λSvp este un subspaŃiu al lui V invariant la T. PropoziŃia 1.4: Dacă VVT →: este un endomorfism al spaŃiului vectorial V,
atunci: 1. Fiecărui vector propriu al lui T îi corespunde o unică valoare proprie λ ;
2. La valori proprii distincte ale lui T corespund vectori proprii liniar independenŃi.
DemonstraŃie: 1. Fie Vv ∈ un vector propriu al endomorfismului T căruia îi
corespund două valori proprii K, 21 ∈λλ . Rezultă că vvT 1)( λ= şi vλvT 2)( = , de
unde Vv 0)( 21 =− λλ . Vectorul v fiind vector propriu, el este nenul, deci obŃinem că
.21 λλ = 2. Demonstrăm prin inducŃie după numărul valorilor proprii. Dacă avem o
singură valoare proprie, acesteia îi corespunde un vector propriu, deci nenul, care formează o submulŃime liniar independentă a lui V.
Presupunem că la n valori proprii distincte corespund vectori proprii liniar independenŃi. Fie acum valorile proprii distincte 121 ,...,, +nλλλ cărora le corespund
vectorii proprii Vvvv n ∈+121 ,...,, . Rezultă că
111222111 )(,...,)(,)( +++ === nnn vvTvvTvvT λλλ . Studiem liniar independenŃa
vectorilor 121 ,...,, +nvvv : considerăm scalarii 121 +n,...,, ααα astfel încât
Vnn v...vv 0112211 =+++ ++ααα (1)
Aplicând endomorfismul T ultimei egalităŃi, succesiv obŃinem:
1n1n1n222111
1n1n22111n1n2211V
v...vv
vT...vTvTv...vvT0
+++
++++
+++=
+++=+++=
λαλαλα
αααααα )()()()( (2)
Cel mult o valoare proprie a lui T este zero, deci există valori proprii nenule. Putem presupune că 1n+λ este una dintre acestea. Dacă înmulŃim relaŃia (1) cu 1n+λ şi o
scădem din (2), obŃinem:
Vnnnnnn v...vv 0)()()( 121221111 =−++−+− +++ λλαλλαλλα
deoarece n,...,v,vv 21 reprezintă n vectori proprii ce corespund la n valori proprii
distincte, folosind ipoteza inductivă, rezultă că ei sunt liniar independenŃi, deci:
Knnnnn ...λλλλ 0)()()( 1122111 =−==−=− +++ λλααα
Cum 1n21 ,...,, +λλλ sunt valori proprii distincte două câte două, obŃinem că
Kn21 ... 0==== ααα (3)
Înlocuind (3) în (1) şi Ńinând cont că Vnv 01 ≠+ , se găseşte imediat şi Kn 01 =+α , deci
121 +n,...,v,vv sunt liniar independenŃi, iar aserŃiunea este demonstrată.
Din punctul 1. al propoziŃiei precedente obŃinem următorul

140
Corolar 1.5: Dacă VVT →: un endomorfism al lui V, iar K, ∈21 λλ sunt
două valori proprii distincte ale lui T, atunci 0)()( 21 VSvpSvp =∩ λλ .
Teorema 1.6: Dacă V este un spaŃiu vectorial complex de dimensiune n,
atunci orice endomorfism VVT →: are exact n valori proprii complexe. DemonstraŃie: Deoarece nVdim =C , atunci există ,...,, 21 neeeB = bază a
lui V. Notăm cu njiijaA ≤≤= ,1)( matricea asociată endomorfismului T în baza B.
Conform definirii matricei asociate unei transformări liniare, avem ∑=
=n
jjjii eaeT
1
)( ,
pentru orice ni ≤≤1 . Un număr complex λ este valoare proprie a endomorfismului T dacă şi numai
dacă există 0\ VVx ∈ astfel încât
xxT λ=)( (4)
Presupunând că scrierea vectorului x în baza B este ∑=
=n
iiiexx
1
, rezultă că
∑ ∑ ∑∑ ∑∑= = == ==
=
==
=
n
ij
n
jji
n
ii
n
ij
n
jjiiii
n
iii eaxeaxeTxexTxT
1 1 11 11
)()(
şi ∑∑==
=
=
n
jjj
n
jjj exexx
11
)(λλλ .
Aşadar, relaŃia (4) devine:
∑∑ ∑== =
=
n
jjjj
n
jji
n
ii exeax
11 1
)(λ .
Deoarece scrierea unui vector într-o bază este unică, obŃinem că jji
n
ii xax λ=∑
=1
,
pentru orice nj ≤≤1 , sau echivalent:
=−+++
=++−+
=+++−
0)(...
....................................................
0...)(
0...)(
2211
2222121
1212111
nnnnn
nn
nn
xaxaxa
xaxaxa
xaxaxa
λ
λ
λ
(5)
Astfel, existenŃa unui vector 0\ VVx ∈ care satisface relaŃia (4) este echivalentă cu
existenŃa unei soluŃii nenule a sistemului liniar omogen (5), situaŃie care se întâmplă atunci şi numai atunci când determinantul coeficienŃilor sistemului este nul:
0
...
............
...
...
21
22221
11211
=
−
−
−
λ
λ
λ
nnnn
n
n
aaa
aaa
aaa
(6)
141
RelaŃia (6) reprezintă o ecuaŃie de gradul n cu necunoscuta λ , având coeficienŃii complecşi. Această ecuaŃie are, conform Teoremei fundamentale a algebrei, exact n soluŃii complexe, care sunt chiar valorile proprii ale endomorfismului T.
Membrul stâng al ecuaŃiei (6) se mai poate scrie ca )( nIAdet λ− , unde nI
reprezintă matricea unitate de ordin n. Corespunzător vom defini polinomul )()( nIAdetP λλ −= . Deşi acest polinom este construit cu ajutorul matricei A (care
se obŃine din baza B considerată), vom arăta că polinomul )(λP este independent de baza aleasă.
PropoziŃia 1.7: Polinomul )(λP nu depinde de baza B a spaŃiului vectorial V,
ci numai de endomorfismul T.
DemonstraŃie: Fie ,...,, 21 neeeB = , ,...,,' ''2
'1 neeeB = două baze ale lui V şi
A, 'A matricele asociate endomorfismului T în bazele B şi respectiv 'B . Conform
Corolarului 3.6 din Capitolul V, ACCA 1' −= , unde C reprezintă matricea de trecere de la baza B la baza 'B . Rezultă că
=−=−=−=− −−−− ))(()()()'( 1111 CIACdetCICACCdetIACCdetIAdet nnnn λλλλ
)()()()( 1nn IAdetCdetIAdetCdet λλ −=−− ,
ceea ce demonstrează invarianŃa polinomului )(λP faŃă de schimbarea bazei spaŃiului vectorial V.
PropoziŃia precedentă permite definirea următoarelor concepte: DefiniŃia 1.8: Polinomul )()( nIAdetP λλ −= se numeşte polinom
caracteristic asociat endomorfismului T, iar ecuaŃia 0)( =− nIAdet λ poartă numele
de ecuaŃie caracteristică a lui T. ObservaŃie: DemonstraŃie Teoremei 1.6 furnizează o metodă pentru
determinarea valorilor proprii şi a vectorilor proprii ai unui endomorfism: valorile proprii sunt rădăcinile ecuaŃiei caracteristice, iar vectorii proprii asociaŃi unei valori proprii 0λ au componentele date de soluŃii nenule ale sistemului de ecuaŃii obŃinut
din sistemul (5) prin înlocuirea lui λ cu 0λ .
ExerciŃiul 1: Să se determine valorile proprii şi vectorii proprii ai
endomorfismului 33: RR →T , )63,53,64(),,( 3212121321 xxxxxxxxxxT +−−−−+= .
SoluŃie: Determinăm mai întâi matricea asociată endomorfismului T în baza
canonică )1,0,0(),0,1,0(),0,0,1( 321 ==== eeeB a lui 3R . Deoarece
)3,3,4()0,0,1( −−=T )6,5,6()0,1,0( −−=T
)1,0,0()1,0,0( =T ,

142
matricea asociată lui T în baza B este
−−
−−=
163
053
064
A , deci ecuaŃia caracteristică
va fi 0
163
053
064
=
−−−
−−−
−
λ
λ
λ
sau, echivalent, 0)1(18)1)(5)(4( =−+−−−− λλλλ .
Rezolvând această ecuaŃie obŃinem valorile proprii: 2,1 321 −=== λλλ .
Vectorii proprii corespunzători valorii proprii duble 121 == λλ sunt daŃi de mulŃimea soluŃiilor nenule ale sistemului
=−−
=−−
=+
063
063
063
21
21
21
xx
xx
xx
, adică
=
=
−=
β
α
α
3
2
1 2
x
x
x
, cu R∈βα , , 022 ≠+ βα .
Deci forma generală a vectorilor proprii corespunzători valorii proprii 1 este
),,2(1 βαα−=v , cu R∈βα , , 022 ≠+ βα .
Pentru determinarea vectorilor proprii corespunzători valorii proprii 23 −=λ ,
rezolvăm sistemul
=+−−
=−−
=+
0363
033
066
321
21
21
xxx
xx
xx
Rezultă că forma generală a vectorilor proprii corespunzători valorii proprii -2 este
),,(1 ααα −−=v , cu *R∈α .
ObservaŃie importantă: Fie V un spaŃiu vectorial de dimensiune n. Deoarece spaŃiul vectorial al endomorfismelor lui V, )(VEndK , şi spaŃiul vectorial al
matricelor pătratice de dimensiune n, )(KnM , sunt izomorfe, au sens noŃiunile de
valori proprii şi vectori proprii ai unei matrice )(KA nM∈ , prin acestea înŃelegând
valorile proprii şi, respectiv, vectorii proprii ai endomorfismului corespunzător matricei A prin intermediul izomorfismului menŃionat anterior (vezi Corolar 2.11, Capitolul V). Mai mult, polinomul )(λP va fi numit şi polinom caracteristic al
matricei A, iar ecuaŃia 0)( =− nIAdet λ , ecuaŃie caracteristică a matricei A. Evident,
valorile proprii ale lui A sunt soluŃii ale ecuaŃiei caracteristice a lui A. Dacă 0λ este
o valoare proprie a matricei A, iar nKv ∈0 un vector propriu corespunzător (scris
sub formă de coloană), atunci din relaŃia (5) obŃinem că nKn vIA 0)( 00 =− λ , sau
echivalent 000 vAv λ= (7)
PropoziŃia următoare furnizează relaŃii de legătură între valorile proprii ale
unei matrice şi urma, respectiv determinantul acesteia. Reamintim că:

143
• dacă )()( ,1 KaA nnjiij M∈≤≤= , atunci suma elementelor de pe diagonala
principală a matricei A se numeşte urma lui A şi se notează )(ATr . Deci
∑=
=n
iiiaATr
1
)( . (Remarcă: notaŃia Tr provine de la “trace” – urmă în limba engleză.)
• dacă )()( ,1 KaA nnjiij M∈≤≤= , atunci din definiŃia determinantului de
ordin n avem ∑∈
=
nSnnaaaAdet
σσσσσε )()2(2)1(1 ...)()( , unde nS este mulŃimea tuturor
permutărilor de gradul n, iar )(σε este signatura permutării σ . PropoziŃia 1.9: Fie )()( ,1 KaA nnjiij M∈≤≤= şi n,...,, λλλ 21 valorile proprii
ale matricei A. Atunci: 1. )(21 ATr... n =+++ λλλ ;
2. )(21 Adet... n =λλλ .
DemonstraŃie: Considerăm )()( nIAdetP λλ −= , polinomul caracteristic al
matricei A. Din definiŃia determinantului de ordin n, rezultă că =−≤+−−−= )2grad de polinoame())...()(()( 2211 naaaP nn λλλλ
012
21
22111 ...)...()1()1( cccaaa n
nn
nnnnn +++++++−+− −
−−− λλλλ .
n,...,, λλλ 21 fiind rădăcinile polinomului caracteristic, din relaŃiile lui Viète
obŃinem:
)()1(
)...()1( 22111
21 ATraaa
...n
nnn
n =−
+++−−=+++
−
λλλ şi
00
21)1(
)1( cc
...n
nn =
−−=λλλ .
Deoarece )()0(0 AdetPc == , rezultă că )(21 Adet... n =λλλ .
ObservaŃie: Pe parcursul acestei demonstraŃii s-a obŃinut că, în polinomul
caracteristic, coeficientul termenului dominant este nna )1(−= , iar termenul liber
este )(21 Adet... n =λλλ .
Din punctul 2. al propoziŃiei anterioare rezultă următorul Corolarul 1.10: O matrice )(KA nM∈ este inversabilă dacă şi numai dacă
toate valorile proprii ale lui A sunt nenule.
DefiniŃia 1.10: Fie ][...)( 011
1 xKaxaxaxaxQ mm
mm ∈++++= −
− un
polinom arbitrar şi )(KA nM∈ . Matricea
)(...)( 01
11
1 KIaAaAaAaAQ nnm
mm
m M∈++++= −−
se numeşte polinom de matrice A definit de Q.

144
Teorema 1.11 (Hamilton-Cayley): Fie matricea )(KA nM∈ şi )(λP polino-
mul său caracteristic. Atunci nAP 0)( = , unde n0 este matricea nulă de ordin n.
DemonstraŃie: Deoarece pentru orice matrice inversabilă )(KC nM∈ avem
*1
)(
1C
CdetC =− , unde *C este matricea adjunctă a lui C, rezultă că:
*1 )()(
1)( nn IA
PIA λ
λλ −=− − ,
pentru orice )(\ ASpecK∈λ , de unde obŃinem
nnn IPIAIA )())(( * λλλ =−− . (7)
Matricea adjunctă *)( nIA λ− are drept componente complemenŃii algebrici ai
elementelor din matricea nIA λ− , deci determinanŃi de ordin 1−n care sunt
polinoame de grad cel mult 1−n în variabila λ . Rezultă că matricea *)( nIA λ−
poate fi scrisă sub forma
01
12
21
1* ΓΓ...ΓΓ)( ++++=− −
−−
− λλλλ nn
nnnIA , (8)
unde )(Γ,...,Γ 01 Knn M∈− .
Presupunem că polinomul caracteristic al matricei A este 01
11 ...)( aaaaP n
nn
n ++++= −− λλλλ . (9)
Înlocuind relaŃiile (8) şi (9) în relaŃia (7) obŃinem:
nn
nn
nn
nn
nn IaaaaIA )...()ΓΓ...ΓΓ)(( 011
1012
21
1 ++++=++++− −−
−−
−− λλλλλλλ .
Prin identificarea coeficienŃilor termenilor de acelaşi grad din cei doi membri ai egalităŃii precedente, găsim relaŃiile:
nnn Ia=− −1Γ
nnnn IaA 121 ΓΓ −−− =−
nnnn IaA 232 ΓΓ −−− =−
........................................
nIaA 101 ΓΓ =−
nIaA 00Γ = .
ÎnmulŃind la stânga prima relaŃie cu nA , a doua cu 1−nA , ..., penultima cu A , iar ultima cu nIA =0 şi adunând obŃinem
)(...0 011
1 APIaAaAaAa nn
nn
n =++++= −− .
Corolarul 1.12: Fie )(KA nM∈ . Atunci pentru orice N∈k putem scrie
nn
nn
nk IAAAA 01
22
11 ... ββββ ++++= −
−−
− ,
cu Kn ∈−110 ,...,, βββ .
DemonstraŃie: Vom proceda prin inducŃie matematică după k. Pentru 1,...,1,0 −∈ nk avem kk AA ⋅= 1 , deci afirmaŃia din corolar este
evidentă. Pentru nk = , din Teorema Hamilton-Cayley, avem

145
0... 011
1 =++++ −− n
nn
nn IaAaAaAa ,
de unde obŃinem
nnnn
nnn IaaAaaAaaA 0
11
111
1 ... −−−−
− −−−−=
( na este inversabil deoarece, conform unei observaŃii anterioare, nna )1(−= ).
Presupunem că nn
nn
nk IAAAA 01
22
11 ... ββββ ++++= −
−−
− . Rezultă că
=++++== −−−
+ AAAAAAA nn
nn
kk0
21
121
1 ... ββββ
=++++−−−− −−
−−−−
−− AAAIaaAaaAaa n
nnnnn
nnn 02
11
201
111
11
1 ...)...( ββββ
nnnnnn
nnnn IaaAaaAaa 01
1011
11
211
1 )(...)( −−
−−
−−−
−− −+−+++− βββββ
Astfel putem concluziona că orice putere a matricei A se poate scrie numai în funcŃie
de matricele nn IAA ,,...,1− .
O aplicaŃie importantă a Teoremei Hamilton-Cayley este, aşa cum rezultă din
următorul corolar, calculul inversei unei matrice: Corolarul 1.13: Dacă )(KA nM∈ este o matrice inversabilă, atunci există
Kn ∈−110 ,...,, βββ astfel încât
nn
nn
n IAAAA 012
21
11 ... ββββ ++++= −
−−
−− .
DemonstraŃie: Din Teorema Hamilton-Cayley avem
0... 011
1 =++++ −− n
nn
nn IaAaAaAa .
Din PropoziŃia 1.9, 0)(0 ≠= Adeta . Rezultă că
AaaAaaAaaI nn
nnn 1
10
11
10
10 ... −−
−−− −−−−= .
ÎnmulŃind această relaŃie cu 1−A obŃinem
nn
nn
n IaaAaaAaaAaaA 11
021
02
11
011
01 ... −−−
−−−−− −−−−−= ,
de unde, notând 11
0021
0111
021
01 ,,...,, aaaaaaaa nnnn−−
−−
−−
− −=−=−=−= ββββ , rezultă
egalitatea dorită.
ExerciŃiul 2: Să se determine inversa matricei
−−
−−=
163
053
064
A .
SoluŃie: Polinomul caracteristic al matricei A este
23
163
053
064
)( 3 −+−=
−−−
−−−
−
= λλ
λ
λ
λ
λP .
Deoarece termenul liber al polinomului caracteristic este nenul, atunci matricea A este inversabilă. Din Teorema Hamilton-Cayley, avem 33
3 023 =−+− IAA , sau
echivalent )3(2
1 33 AAI +−= . ÎnmulŃind această egalitate cu 1−A obŃinem

146
−−
−−=+−=−
132
3
022
3
032
5
)3(2
13
21 IAA .
2. Localizarea valorilor proprii
În paragraful anterior am văzut că valorile proprii ale unui endomorfism sau ale unei matrice )(KA nM∈ se obŃin prin rezolvarea ecuaŃiei caracteristice
0)( =− nIAdet λ . Această tehnică de găsire a valorilor proprii are în principal două
inconveniente: în primul rând trebuie calculat un determinant de ordin n, proces destul de laborios când n creşte; în al doilea rând, rezolvarea unei ecuaŃii algebrice de grad cel puŃin 5 poate fi extrem de dificilă (N.H. Abel a demonstrat în 1824 că, pentru o ecuaŃie algebrică de grad cel puŃin 5, nu există formule de calcul ale soluŃiilor în funcŃie de coeficienŃi, formule care să utilizeze operaŃii de adunare, înmulŃire şi radicali).
În cele ce urmează, vom prezenta două rezultate obŃinute de S.A. Gerschgorin în 1931, rezultate ce permit o localizare a valorilor proprii ale unei matrice
)(CnA M∈ .
Teorema 2.1 (Gerschgorin): Fie )()( ,1, CnnjiijaA M∈=
= . Dacă pentru orice
ni ≤≤1 se notează ∑≠=
=n
ijjiji ar
,1
, iiii raz/zD ≤−∈= C , atunci
Un
iiDASpec
1
)(=
⊆ , (1)
cu alte cuvinte, orice valoare proprie a matricei A se află în cel puŃin unul din discurile iD , numite discuri Gerschgorin.
DemonstraŃie: Considerăm λ o valoare proprie arbitrară a matricei A şi v un
vector propriu corespunzător lui λ . Notăm cu nvvv ,...,, 21 componentele vectorului v
în baza canonică a spaŃiului vectorial complex nC şi cu k indicele pentru care ,...,, 21 nk vvvmaxv = . Deoarece orice vector propriu este nenul, rezultă că 0≠kv .
EcuaŃia k a sistemului (5) (din secŃiunea precedentă) pe care-l verifică vectorul v : 0...)(... 11,11,11 =+++−+++ ++−− nknkkkkkkkkkk vavavavava λ

147
este echivalentă cu ∑≠=
−=λ−n
kjj k
jkjkk v
vaa
,1
. Aplicând modulul egalităŃii precedente
şi Ńinând cont de proprietăŃile acestuia, rezultă că:
∑∑∑≠=≠=≠=
=≤⋅≤−=−n
kjjkkj
n
kjj k
jkj
n
kjj k
jkjkk ra
v
va
v
vaa
,1,1,1
λ ,
adică kD∈λ . Cum λ a fost o valoare proprie arbitrară, incluziunea din enunŃ este
clară.
ObservaŃie: Se poate obŃine o “rafinare” (în sensul de restrângere) a
domeniului Un
iiD
1=
căruia aparŃin valorile proprii ale unei matrice A dacă se
consideră în plus ∑≠=
=n
ijjjii ac
,1
şi iiiti caz/zD ≤−∈= C (adică se lucrează cu
sume pe coloanele matricei în locul sumelor pe linii). Având în vedere că
)()( tASpecASpec = şi transferând rezultatul Teoremei 2.1 de la matricea A la
transpusa ei, obŃinem că:
I UU
⊆
==
n
i
ti
n
ii DDASpec
11
)( (2)
Teorema 2.2 (Gerschgorin): Fie )(CnA M∈ . Dacă există o reuniune de p
discuri Gerschgorin disjunctă de celelalte n-p discuri, atunci există exact p valori proprii (nu neapărat distincte) ale matricei A, care aparŃin reuniunii celor p discuri iniŃiale.
DemonstraŃie: Vom folosi următorul rezultat: rădăcinile unui polinom cu coeficienŃi complecşi sunt funcŃii continue de coeficienŃii polinomului (vezi [23], pag. 49). Deoarece coeficienŃii polinomului caracteristic ai matricei A se scriu în funcŃie de componentele matricei, rezultă că valorile proprii ale matricei A variază continuu cu componentele ei.
Putem scrie matricea A sub forma CBA += , unde
=
nna
a
a
B
...00
............
0...0
0...0
22
11
şi
=
0...
............
...0
...0
21
221
112
nn
n
n
aa
aa
aa
C .
Pentru orice ]1,0[∈t , notăm tCBtA +=)( . Din Teorema 2.1, valorile proprii )(tiλ
ale matricei )(tA aparŃin reuniunii discurilor Gerschgorin )(tDi definite de
iii traz ≤− cu ∑≠=
=n
ijjiji ar
,1
. Discurile )(tDi cresc continuu o dată cu t, de la
punctele individuale iia , când 0=t , până la discurile Gerschgorin ale matricei A,
când 1=t . Deci, dacă cele p discuri având reuniunea disjunctă de celelalte pn − au
centrele în ppiiiiii aaa ,...,,
2211, atunci reuniunea )(...)()()(
21tDtDtDt
piii ∪∪∪=Ω

148
este disjunctă de reuniunea )(~
tΩ a celorlalte pn − discuri Gerschgorin ale matricei )(tA , pentru orice ]1,0[∈t .
Vom demonstra că )()( ttj Ω∈λ , pentru orice ,...,, 21 piiij ∈ şi orice
]1,0[∈t . Presupunem prin absurd că această apartenenŃă a tuturor valorilor proprii menŃionate la mulŃimea )(tΩ nu are loc. Atunci, având în vedere:
1. continuitatea variabilităŃii valorilor proprii )(tiλ o dată cu parametrul t;
2. φ=Ω∩Ω )(~
)( tt , pentru orice ]1,0[∈t ;
3. )0()0( iiii Da ∈=λ ,
ar rezulta că există un ,...,, 210 piiij ∈ şi un ]1,0[0 ∈t astfel încât
)(~
)()( 0000tttj Ω∩Ω∉λ , contradicŃie cu Teorema 2.1. Deci presupunerea făcută este
falsă. Dând lui t valoarea 1, obŃinem că )1(...)1()1()1()1(21 piiij DDD ∪∪∪=Ω=λ ,
pentru orice ,...,, 21 piiij ∈ , adică exact p valori proprii ale matricei A aparŃin
reuniunii celor p discuri Gerschgorin şi astfel teorema este complet demonstrată.
Corolar 2.3: Dacă pentru matricea )(CnA M∈ există un disc Gerschgorin
izolat de celelalte 1−n discuri, atunci acest disc conŃine exact o valoare proprie a matricei A.
ExerciŃiul 1: Să se localizeze valorile proprii ale matricei
−
=
501
160
115
A .
SoluŃie: Vom prezenta două modalităŃi de localizare. Prima dintre acestea foloseşte Teorema 2.1: avem 21 =r , 12 =r , 13 =r , iar
discurile Gerschgorin 251 ≤−∈= z/zD C , 162 ≤−∈= z/zD C şi
153 ≤+∈= z/zD C . Astfel, 31321)( DDDDDASpec ∪=∪∪⊆ .
fig. 42
3 5 7 -5
1D
2D 3D
y
O x

149
De menŃionat că, deoarece φ=∪∩ )( 213 DDD , atunci, conform Teoremei 2.2, în
discul 3D se află exact o valoare proprie a lui A, iar în 121 DDD =∪ se află celelalte
două valori proprii. Pentru a obŃine o localizare şi mai bună, vom folosi formula (2) din observaŃia
anterioară: 11 =c , 12 =c , 23 =c , iar 151 ≤−∈= z/zD t C , 162 ≤−∈= z/zD t C
şi 253 ≤+∈= z/zDt C . Atunci
321321321 )()()( DDDDDDDDDASpec tttt ∪∪=∪∪∩∪∪⊆
fig. 43
Prin rezolvarea ecuaŃiei caracteristice a matricei A se găsesc 51 =λ ,
2
5512
+=λ şi
2
5513
−=λ . Este uşor de verificat că aceste valori proprii aparŃin
discurilor tD1 , 2D şi respectiv 3D .
3. Diagonalizarea unui endomorfism (sau a unei matrice)
În acest paragraf V va fi spaŃiu vectorial finit dimensional.
DefiniŃia 3.1: O matrice )(KD nM∈ de forma
=
nd
d
d
D
...00
............
0...0
0...0
2
1
(adică având elemente nenule cel mult pe diagonala principală) se numeşte matrice diagonală. Se mai notează ),...,,( 21 nddddiagD = .
5 6 -5
2D 3D
y
O x tD1

150
DefiniŃia 3.2: Două matrice )(, KBA nM∈ se numesc matrice asemenea
dacă există o matrice )(KC nM∈ , inversabilă, astfel încât CACB ⋅⋅= −1 . În acest
caz vom nota BA ~ . ObservaŃie: Din demonstraŃia PropoziŃiei 1.7 reiese că două matrice
asemenea au aceleaşi valori proprii. DefiniŃia 3.3: 1. Fie )(KA nM∈ . Spunem că A este matrice diagonalizabilă
dacă există o matrice diagonală D astfel încât DA ~ . În acest caz, matricea D se numeşte forma diagonală a matricei A.
2. Fie V un spaŃiu vectorial şi VVT →: un endomorfism al lui V. Spunem că T este diagonalizabil dacă există o bază a lui V în care matricea asociată lui T este diagonală.
Teorema 3.4: Fie VVT →: un endomorfism al lui V. Atunci T este
diagonalizabil dacă şi numai dacă există o bază a lui V formată din vectori proprii ai lui T.
DemonstraŃie: Fie )(Vdimn K= . Presupunem mai întâi că T este diagonalizabil. Atunci, conform definiŃiei
precedente, există ,...,, 21 neeeB = o bază a lui V faŃă de care matricea A asociată lui
T este matrice diagonală:
=
nna
a
a
A
...00
............
0...0
0...0
22
11
.
Din definiŃia matricei ataşate unei transformări liniare într-o anumită bază avem
iiii eaeT =)( , pentru orice ni ≤≤1 . Deoarece vectorii neee ,...,, 21 fac parte dintr-o
bază, ei sunt nenuli şi astfel, din egalitatea anterioară, nnaaa ,...,, 2211 sunt valori
proprii ale lui T, iar neee ,...,, 21 sunt vectori proprii corespunzători acestor valori
proprii. Deci B este o bază formată din vectori proprii ai lui T. Reciproc, presupunem că există ,...,, 21 neeeB = o bază a lui V formată din
vectori proprii ai endomorfismului T. Pentru orice ni ≤≤1 notăm cu iλ valoarea
proprie căreia îi corespunde vectorul propriu ie . Atunci iii eeT λ=)( , pentru orice
ni ≤≤1 . Deci matricea asociată lui T în baza B este matricea diagonală
=
n
D
λ
λ
λ
...00
............
0...0
0...0
2
1
.
ObservaŃie: De reŃinut că, dacă endomorfismul T este diagonalizabil, atunci
baza în care matricea asociată este matrice diagonală este formată din vectorii proprii ai lui T.

151
Teorema 3.5: Fie VVT →: un endomorfism al lui V. Dacă valorile proprii ale lui T aparŃin corpului K şi sunt distincte două câte două, atunci T este diagonalizabil.
DemonstraŃie: Fie )(Vdimn K= şi nλλλ ,...,, 21 valorile proprii ale lui T.
Pentru fiecare valoare proprie iλ considerăm iv , un vector propriu corespunzător.
Deoarece valorile proprii ale lui T sunt diferite două câte două, din PropoziŃia 1.4 avem că vectorii proprii nvvv ,...,, 21 sunt liniar independenŃi. Cum nVdimK =)( ,
atunci ,...,, 21 nvvvB = formează o bază a lui V şi deci, din Teorema 3.4, obŃinem că
endomorfismul T este diagonalizabil. Teorema precedentă furnizează o condiŃie necesară pentru ca un endomorfism
să fie diagonalizabil. Din enunŃul ei, nu putem afirma nimic în cazul în care există cel putin două valori proprii egale. În continuare ne vom ocupa de găsirea unei condiŃii necesare şi suficiente, condiŃie care să ne permită să concluzionăm şi când un endomorfism nu este diagonalizabil.
DefiniŃia 3.6: Fie VVT →: este un endomorfism al lui V şi λ o valoare
proprie a lui T. 1. Se numeşte multiplicitate algebrică a lui λ şi se notează cu )(λma ordinul
de multiplicitate al valorii proprii λ ca rădăcină a ecuaŃiei caracteristice a endomorfismului T.
2. Se numeşte multiplicitate geometrică a lui λ şi se notează cu )(λmg dimensiunea subspŃiului )(λSvp , al vectorilor proprii corespunzători valorii proprii
λ . PropoziŃia 3.7: Fie VVT →: este un endomorfism şi 0λ o valoare proprie a
lui T. Atunci are loc inegalitatea: )()( 00 λλ mamg ≤ .
DemonstraŃie: Vom nota )(Vdimn K= , )( 0λmgp = şi ,...,, 21 peeeB = o
bază a subspaŃiului vectorial propriu )( 0λSvp . Deoarece )( 0λSvp este un subspaŃiu
vectorial al lui V, atunci evident np ≤ . Dacă np = , atunci matricea asociată endomorfismului T în baza B este
=
0
0
0
...00
............
0...0
0...0
λ
λ
λ
A ,
de unde obŃinem ecuaŃia caracteristică a lui T : 0)()1( 0 =−− nn λλ . Rezultă că 0λ
este rădăcină multiplă de ordin n a ecuaŃiei caracteristice şi astfel )()( 00 λλ manmg == .
Dacă np < , atunci completăm baza ,...,, 21 peeeB = a lui )( 0λSvp la o
bază ,...,,,...,,' 121 npp eeeeeB += a lui V. Deoarece pentru orice pi ≤≤1 , ie este

152
vector propriu al lui T corespunzător valorii proprii 0λ , atunci ii eeT 0)( λ= . Pentru
nip ≤≤+1 , avem o scriere de forma ∑=
=n
jjjii eaeT
1
)( . Aşadar, matricea asociată lui
T în baza 'B este
=
+
+
+
+
nnpn
nppp
np
np
aa
aa
aa
aa
A
,1,
,1,0
,21,20
,11,10
...0...00
.....................
......00
.....................
...0...0
...0...0
λ
λ
λ
.
În acest caz, ecuaŃia caracteristică a lui T este:
0)()()1( 0 =−− λλλ Qpp , (1)
unde
λ
λ
λ
λ
−
−
−
=
++
+++++
+++++
nnpnpn
nppppp
nppppp
aaa
aaa
aaa
Q
,2,1,
,22,21,2
,12,11,1
...
............
...
...
)( .
Din relaŃia (1) obŃinem că )()( 00 λλ mgpma =≥ şi astfel propoziŃia este complet
demonstrată.
Teorema 3.8 (Criteriul general de diagonalizare): Endomorfismul VVT →: este diagonalizabil dacă şi numai dacă polinomul său caracteristic are toate rădăcinile în corpul K şi pentru orice valoare proprie λ a lui T avem
)()( λλ mamg = . DemonstraŃie: Fie )(Vdimn K= . Presupunem mai întâi că endomorfismul T este diagonalizabil. Atunci,
conform Teoremei 3.4, există ,...,, 21 neeeB = o bază a lui V formată din vectori
proprii ai lui T faŃă de care matricea A asociată lui T este matrice diagonală. Notăm cu pλλλ ,...,, 21 elementele de pe diagonala principală a matricei A. Atunci polinomul
caracteristic al endomorfismului T este: pn
pnnnP )...()()()1()( 21
21 λλλλλλλ −−−−= ,
unde in reprezintă numărul de apariŃii al lui iλ pe diagonala principală, pentru
pi ≤≤1 . Rezultă că nnp
ii =∑
=1
şi Ki ∈λ sunt valori proprii ale lui T având
multiplicităŃile algebrice in (apartenenŃa valorilor iλ la corpul K este clară, deoarece
)(KA nM∈ ).
Fără a reduce generalitatea, putem presupune că primii 1n vectori ai bazei B
corespund valorii proprii 1λ , următorii 2n vectori corespund valorii proprii 2λ , şi aşa

153
mai departe. Atunci vectorii 1
,...,, 21 neee aparŃin subspaŃiului vectorilor proprii
)( 1λSvp şi cum aceşti vectori erau liniar independenŃi, numărul lor 1n este cel mult
egal cu dimensiunea lui )( 1λSvp : )( 11 λSvpdimn K≤ . Pe de altă parte, din PropoziŃia
3.7, avem 1111 )()()( nmamgSvpdimK =≤= λλλ . Rezultă că )( 11 λSvpdimn K= ,
adică )()( 11 λλ mgma = . Similar se demonstrează că )()( ii mgma λλ = , pentru orice
pi ≤≤2 . Reciproc, presupunem acum că polinomul caracteristic al lui T are toate
rădăcinile în corpul K şi pentru orice valoare proprie λ a lui T avem )()( λλ mamg = .
Fie pλλλ ,...,, 21 valorile proprii distincte două câte două ale lui T şi pnnn ,...,, 21
multiplicităŃile lor algebrice. Evident nnp
ii =∑
=1
. Fie ,...,,1211 neeeB = o bază a
subspaŃiului )( 1λSvp , ,...,,211 212 nnn eeeB ++= o bază a subspaŃiului )( 2λSvp ,... şi
,...,, 21 11 ppp nnnp eeeB ++ −−= o bază a subspaŃiului )( pSvp λ . Considerăm mulŃimea
de vectori pBBBB ∪∪∪= ...21 . Deoarece 0)()( Vji SvpSvp =∩ λλ (vezi Corolar
1.5), pentru orice ji ≠ , mulŃimea B conŃine exact nnnn p =+++ ...21 vectori. Mai
mult, fiecare dintre mulŃimile pBBB ,..., 21 sunt liniar independente şi Ńinând cont de
PropoziŃia 1.4 obŃinem că B este mulŃime liniar independentă având Vdimn K= elemente. Deci B este o bază a lui V. Se verifică imediat că matricea asociată endomorfismului T în baza B este matrice diagonală şi astfel T este diagonalizabil.
ObservaŃie: Fie VVT →: un endomorfism care, într-o bază B a lui V, are matricea ataşată A. Dacă ),...,,( 21 ndiagD λλλ= este forma diagonală a matricei A,
atunci
DCAC =⋅⋅−1 , (2) unde C este matricea având pe coloane componentele în baza B ale vectorilor proprii ai lui T corespunzători vectorilor proprii nλλλ ,...,, 21 .
RelaŃia (2) este echivalentă cu 1−⋅⋅= CDCA . Prin ridicare la puterea n obŃinem:
1−⋅⋅= CDCA nn (3)
ExerciŃiul 1: Fie endomorfismul 33: RR →T având matricea asociată în
baza canonică a lui 3R :
−
−
−
=
211
305
310
A . StudiaŃi dacă T este diagonalizabil, iar în
caz afirmativ găsiŃi forma diagonală a matricei A. SoluŃie: Determinăm mai întâi valorile proprii ale endomorfismului, prin
rezolvarea ecuaŃiei caracteristice:

154
0
211
35
31
=
−−
−−
−−
λ
λ
λ
.
Vom găsi 11 −=λ , 12 =λ şi 23 =λ . Deoarece valorile proprii sunt distincte două
câte două, din Teorema 3.5 obŃinem că T este diagonalizabil. Mai mult, forma
diagonală a matricei A este:
−
=
200
010
001
D .
ExerciŃiul 2: Fie endomorfismul 33: RR →T căruia în baza canonică îi este asociată matricea
−
−
=
611
051
015
A .
i) ArătaŃi că endomorfismul T este diagonalizabil;
ii) DeterminaŃi o bază B a lui 3R în raport de care matricea asociată lui T are forma diagonală;
iii) CalculaŃi 2009A . SoluŃie: i) Rezolvăm ecuaŃia caracteristică a lui T pentru a determina valorile
proprii:
0
611
051
015
=
−
−−
−−
λ
λ
λ
.
Dezvoltând determinantul după ultima coloană obŃinem: 051
15)6( =
−−
−−−
λ
λλ , de
unde rezultă 0)4()6( 2 =−− λλ . Astfel, valorile proprii ale lui T sunt 621 == λλ şi
43 =λ . Deoarece 21 λλ = , vom decide dacă T este diagonalizabil cu ajutorul
Criteriului general de diagonalizare. Vectorii proprii corespunzători valorii proprii 6 sunt daŃi de sistemul:
=+
=−−
=−−
0
0
06
21
21
21
xx
xx
xx
, adică
=
−=
=
β
α
α
3
2
1
x
x
x
, cu R∈βα , , 022 ≠+ βα .
SubspaŃiul invariant corespunzător valorii proprii 6 este ,/),,()6( R∈−= βαβααSvp .
O bază pentru )6(Svp este )1,0,0(,)0,1,1(1 −=B , de unde rezultă 2)6( =SvpdimR . Aşadar 2)6()6( == mgma .
Pentru valoarea proprie 4, vectorii proprii sunt daŃi de sistemul:
=++
=+−
=−
02
0
0
321
21
21
xxx
xx
xx
, adică
−=
=
=
α
α
α
3
2
1
x
x
x
, cu *R∈α .

155
SubspaŃiul invariant corespunzător valorii proprii 4 este /),,()4( R∈= ααααSvp .
O bază pentru )4(Svp este )1,1,1(2 −=B , de unde rezultă 1)4( =SvpdimR . Aşadar 1)4()4( == mgma .
Deoarece toate valorile proprii ale lui T sunt numere reale şi au multiplicitatea algebrică egală cu cea geometrică, din Criteriului general de diagonalizare obŃinem că T este diagonalizabil.
ii) O bază în care matricea asociată endomorfismului T are forma diagonală este )1,1,1(,)1,0,0(,)0,1,1(21 −−=∪= BBB
iii) Vom folosi relaŃia (3) din observaŃia anterioară. Matricea C va avea drept
coloane vectorii bazei B, adică
−
−=
110
101
101
C . Rezultă că
−
=−
011
111
011
2
11C .
Deci:
=
−
⋅
⋅
−
−=⋅⋅= −
011
111
011
2
1
400
060
006
110
101
101
2009
2009
2009
120092009 CDCA
−−
++−
+−+
=20092009200920092009
2009200920092009
2009200920092009
64646
04646
04646
2
1 .
4. Metoda puterii
În acest paragraf vom prezenta o metodă iterativă care permite determinarea aproximativă, în anumite condiŃii, a valorii proprii de modul maxim, precum şi a unui vector propriu corespunzător. Pentru simplificarea scrierii vom conveni că toŃi vectorii care apar în continuare vor fi vectori coloană (adică elementele spaŃiului vectorial real
nR sunt scrise sub formă de coloană). DefiniŃia 4.1: Fie )(RnA M∈ o matrice având valorile proprii nλλλ ,...,, 21 .
Spunem că 1λ este valoare proprie dominantă dacă
iλλ >1 ,
pentru orice ni ,2= . Vectorii proprii corespunzători valorii proprii 1λ se numesc vectori proprii dominanŃi.
Pentru matricea )(RnA M∈ facem următoarele presupuneri:
1) A admite valoarea proprie dominantă 1λ ;

156
2) există n vectori proprii nnvvv R∈,...,, 21 liniar independenŃi, corespunză-
tori celor n valori proprii nλλλ ,...,, 21 .
De remarcat că, deoarece nnvvv R∈,...,, 21 şi )(RnA M∈ , din egalitatea
iii vAv λ= rezultă că R∈iλ pentru orice ni ,1= .
Considerăm vectorul nenul n
nx
x
x
X R∈
=
)0(
)0(2
)0(1
)0(
.... Deoarece nvvv ,...,, 21
formează o bază a lui nR , atunci există şi sunt unici R∈nααα ,...,, 21 , astfel încât
nnvvvX ααα +++= ...2211)0( .
Definim )0()1( AXX = , )0(2)1()2( XAAXX == , )0(3)2()3( XAAXX == etc. În general,
)0()( XAX kk = ,
pentru *N∈k . Deoarece 01 ≠λ (fiind valoare proprie dominantă), avem:
=+++=+++= )(...)()()...( 22112211)0(
nk
nkk
nnkk vAvAvAvvvAXA αααααα
++
+=+++= n
kn
n
kk
nknn
kk vvvvvv1
21
22111222111 ...)(...)()(
λ
λα
λ
λααλλαλαλα .
ObŃinem că
n
kn
n
kk
kvvvX
++
=−
12
1
2211
)(
1
...1
λ
λα
λ
λαα
λ.
Trecând la normă în egalitatea precedentă, rezultă că
++≤
++
=− ......
12
1
22
12
1
2211
)(
1
vvvvXk
n
kn
n
kk
k λ
λα
λ
λα
λ
λαα
λ
01
→+∞→k
n
kn
n vλ
λα (deoarece rapoartele
1λ
λi sunt subunitare).
Astfel, în ipoteza că 01 ≠α , şirul de vectori 1
)(
1
1
≥
k
kk
Xλ
aproximează un multiplu
nenul al vectorului 1v , deci un vector propriu dominant al matricei A.
În plus, pentru k suficient de mare, avem 111)( vX kk αλ≈ , de unde rezultă că
111
1)1( vX kk αλ ++ ≈ . Vectorul )(kX , aproximând un vector propriu, va avea cel puŃin o
componentă nenulă. Fie aceasta kjx . Atunci obŃinem că
kj
kj
x
x 1
1
+
≈λ .

157
S-a obŃinut astfel următoarea metodă, numită Metoda puterii, utilizată la aproximarea valorii proprii dominante şi a unui vector propriu dominant, pentru o matrice )(RnA M∈ care satisface condiŃiile 1) şi 2):
- Etapa 1: se consideră un vector arbitrar nenul )0(X numit şi vector de iniŃializare;
- Etapa 2: se calculează )0()1( AXX = , )1()2( AXX = , )2()3( AXX = , ...., )0()( XAX kk = , )0(1)1( XAX kk ++ = (k fiind ales suficient de mare);
- Etapa 3: se alege o componentă nenulă a vectorului )(kX - fie aceasta )(kjx -
şi atunci valoarea proprie dominantă a matricei A va fi aproximată de
)(
)1(
1 kj
kj
x
xλ
+
≈ ;
-Etapa 4: )(kX aproximează un vector propriu dominant al matricei A. ExerciŃiu: Utilizând metoda puterii, să se calculeze cinci iteraŃii pentru
aproximarea valorii proprii maxime în modul a matricei
321
232
123
.
Se va considera vectorul de iniŃializare
=
0
0
1)0(X .
SoluŃie: Se calculează succesiv:
=
==
1
2
3
0
0
1
321
232
123)0()1( AXX ;
=
==
10
14
14
1
2
3
321
232
123)1()2( AXX ;
=
==
72
90
80
10
14
14
321
232
123)2()3( AXX ;
=
==
476
574
492
72
90
80
321
232
123)3()4( AXX ;
=
==
3068
3658
3100
476
574
492
321
232
123)4()5( AXX .
Valoarea proprie de modul maxim este 30081,6492
3100)4(
1
)5(1
1 ≈=≈x
xλ , iar un
vector propriu corespunzător acestei valori proprii este
=≈
3068
3658
3100)5(
1 Xv .

158
5. ExerciŃii
1. Să se determine valorile proprii şi vectorii proprii ai matricelor:
a)
25
43; b)
− 62
31;
c)
−
−
−
121
101
365
; d)
001
010
100
; e)
−−
−
411
121
110
.
2. Fără a rezolva ecuaŃia caracteristică determinaŃi care dintre următorii vectori
a)
−
1
0
1
1
, b)
−
2
2
0
1
, c)
−
0
1
0
1
, d)
−
0
3
1
0
sunt vectori proprii ai matricei
−−−−
−−−−
=
1272132
581520
1368
4269
A .
Pentru vectorii proprii găsiŃi determinaŃi şi căror valori proprii corespund ei.
3. Fie )(, RnBA M∈ două matrice astfel încât )()( BSpecASpec = . Rezultă
din această egalitate că matricele au acelaşi polinom caracteristic? 4. Fie )(, RnBA M∈ două matrice asemenea. Atunci:
i) matricele 2A şi 2B sunt asemenea. Generalizare. ii) dacă matricea A este inversabilă, atunci B este inversabilă, iar matricele
1−A şi 1−B sunt asemenea. 5. Fie )(, RnBA M∈ două matrice. Dacă A sau B este matrice inversabilă,
atunci matricele AB şi BA sunt asemenea.
6. Cu ajutorul discurilor Gerschgorin demonstraŃi că următoarea matrice:
−
−
−
=
0050
0101
40120
0201
A
are cel puŃin două valori proprii reale. 7. Să se reprezinte grafic discurile Gerschgorin asociate matricelor următoare:

159
a)
−
33
11
02
3
2
1
121
; b)
1010
121
215
; c)
+
765
30
2421
i
i
şi sa se precizeze câte valori proprii sunt situate în fiecare din zonele determinate de aceste discuri.
8. StudiaŃi care dintre următoarele matrice sunt diagonalizabile, iar în caz afirmativ determinaŃi forma diagonală.
a)
−
−
−
111
131
222
; b)
−−
−−
−
621
292
126
; c)
−
−
212
044
010
;
d)
−
−
600
151
115
; e)
−
−
321
202
121
.
9. Să se calculeze cinci iteraŃii, cu ajutorul metodei puterii, pentru aproximarea
valorii proprii maxime în modul a matricei
311
131
113
.
Se va considera vectorul de iniŃializare
=
0
1
0)0(X .
160
Capitolul VIII
Clase speciale de matrice
1. Matrice ortogonale
În acest capitol, pentru elementele spaŃiului vectorial nR vom folosi scrierea sub formă de matrice coloană.
DefiniŃia 1.1: O matrice )(RnA M∈ se numeşte ortogonală dacă nt IAA = .
Exemple: Matricele
10
01 ,
−
01
10 ,
−
αα
αα
cossin
sincos ,
−
αα
αα
cos0sin
010
sin0cos
sunt ortogonale, acest lucru probându-se prin calcul direct. PropoziŃia 1.2: 1. Dacă )(RnA M∈ este matrice ortogonală, atunci:
a) 1)( ±=Adet ;
b) 1−A este matrice ortogonală. 2. Dacă )(, RnBA M∈ sunt matrice ortogonale, atunci AB este matrice
ortogonală.
DemonstraŃie: 1. a) Deoarece nt IAA = , rezultă că 1)( =tAAdet , sau
echivalent 1)()( =tAdetAdet . Dar )()( AdetAdet t = . Astfel obŃinem 1)( 2 =Adet , de unde 1)( ±=Adet .
b) Din relaŃia nt IAA = se obŃine imediat că tAA =−1 , de unde, prin
transpunere, AA t =− )( 1 . ÎnmulŃind la stânga ultima egalitate cu 1−A , rezultă că
nt IAA =−− )( 11 . Deci 1−A este matrice ortogonală.
2. Folosind proprietăŃile transpusei unei matrice şi definiŃia matricei ortogonale, succesiv avem:

161
ntt
nttttt IAAAAIABBAABABABAB ===== )())(())(( ,
deci AB este matrice ortogonală. Teorema 1.3: Pentru o matrice )(RnA M∈ următoarele afirmaŃii sunt
echivalente: 1. A este matrice ortogonală;
2. liniile lui A formează o bază ortonormată a spaŃiului euclidian nR ;
3. coloanele lui A formează o bază ortonormată a spaŃiului euclidian nR . DemonstraŃie: Dacă
=
nnnn
n
n
aaa
aaa
aaa
A
...
............
...
...
21
22221
11211
,
atunci vom nota cu naaa ...,,, 21 vectorii linie ai matricei A: ),...,( 112,111 naaaa = ,
),...,( 222,212 naaaa = , ..., ),...,( 2,1 nnnnn aaaa = . Se verifică imediat, prin calcul
direct, că
=
nnnn
n
n
t
aaaaaa
aaaaaa
aaaaaa
AA
,...,,
............
,...,,
,...,,
21
22212
12111
(1)
1.⇒ 2. Deoarece A este matrice ortogonală, avem nt IAA = . Astfel, Ńinând
cont şi de relaŃia (1), obŃinem că
=
1...00
............
0...10
0...01
,...,,
............
,...,,
,...,,
21
22212
12111
nnnn
n
n
aaaaaa
aaaaaa
aaaaaa
.
Rezultă că ijji aa δ=, , pentru orice nji ,1, = . Cum vectorii naaa ...,,, 21 sunt
ortogonali doi căte doi, ei sunt liniar independenŃi (vezi PropoziŃia 2.4, Capitolul IV)
şi vor forma o bază a lui nR . Din ijji aa δ=, , obŃinem că ,...,, 21 naaaB = este
bază ortonormată a lui nR .
2.⇒ 1. Deoarece ,...,, 21 naaaB = este o bază ortonormată a lui nR , atunci
ijji aa δ=, , pentru orice nji ,1, = . Din relaŃia (1) obŃinem că
nt IAA =
=
1...00
............
0...10
0...01
,
adică A este matrice ortogonală.

162
1. ⇔ 3. Această echivalenŃă este acum clară, înlocuind matricea A cu tA şi folosind echivalenŃa 1. ⇔ 2.
Următoarea propoziŃie furnizează o caracterizare a matricelor ortogonale cu
ajutorul produsului scalar de pe spaŃiul euclidian nR , introdus în Capitolul IV. Teorema 1.4: O matrice )()( ,1, RnnjiijaA M∈
== este ortogonală dacă şi
numai dacă A păstrează produsul scalar, adică yxAyAx ,, =
pentru orice nyx R∈, .
DemonstraŃie: Presupunem mai întâi că A este matrice ortogonală, adică
nt IAA = . łinând cont de proprietăŃile transpusei unei matrice, rezultă că
yxyxyIxyAAxAyAxAyAxAyAx tn
tttttt ,)())(()()(, ====== .
Reciproc, presupunem că yxAyAx ,, = , pentru orice nyx R∈, .
Considerăm ,...,2,1, nji ∈ arbitrari. Atunci jiji eeAeAe ,, = , unde ji ee , sunt
vectorii din nR având 1 pe poziŃia i, respectiv j, şi 0 în rest. Rezultă că
jnnijijijtt
ijt
ijiij aaaaaaeAAeAeAeAeAe +++==== ...)()()(, 2211δ ,
ceea ce reprezintă elementul situat pe poziŃia ),( ji în matricea AAt . Deci nt IAA = ,
de unde rezultă că nt IAA = , adică A este matrice ortogonală.
Corolarul 1.5: O matrice )(RnA M∈ este ortogonală dacă şi numai dacă A
păstrează lungimile vectorilor, adică xAx =
pentru orice nx R∈ .
DemonstraŃie: Presupunem mai întâi că A este matrice ortogonală. Din definiŃia normei unui vector într-un spaŃiu euclidian şi din teorema precedentă avem:
xxxAxAxAx === ,, ,
pentru orice nx R∈ .
Reciproc, presupunem că xAx = pentru orice nx R∈ . Considerăm
nyx R∈, doi vectori arbitrari. Atunci:
=++=+=+=++=++ )(),()(,,,2,22
yxAyxAyxAyxyxyxyyyxxx
yyAyAxxxAyAyAyAxAxAxAyAxAyAx ,,2,,,2,, ++=++=++ .
Rezultă că yxAyAx ,, = . Din Teorema 1.4 putem conchide că A este matrice
ortogonală.

163
Corolarul 1.6: Dacă )(RnA M∈ este matrice ortogonală, atunci A păstrează
unghiurile dintre vectori, adică cos =),( AyAx cos ),( yx
pentru orice nyx R∈, .
DemonstraŃie: Din definiŃia unghiului dintre doi vectori într-un spaŃiu euclidian, Teorema 1.4 şi Corolarul 1.5 avem :
cos ===yx
yx
AyAx
AyAxAyAx
,,),( cos ),( yx .
ExerciŃiu: Să se studieze dacă matricea
−
−
−
=
122
212
221
3
1A
este ortogonală.
SoluŃia 1: Vom folosi Teorema 1.3. Considerând vectorii determinaŃi de liniile matricei A:
)2,2,1(3
11 −=a , )2,1,2(
3
12 −=a , )1,2,2(
3
13 −=a ,
vom avea:
19
4
9
4
9
1, 11 =++=aa , 0
9
4
9
2
9
2, 21 =+−−=aa
19
4
9
1
9
4, 22 =++=aa , 0
9
2
9
4
9
2, 31 =−+−=aa
19
1
9
4
9
4, 33 =++=aa , 0
9
4
9
2
9
2, 32 =+−−=aa .
Deoarece 321 ,, aaa sunt ortogonali doi câte doi, din PropoziŃia 2.4, Capitolul IV
rezultă că 321 ,, aaa sunt liniar independenŃi şi ei vor constitui o bază a lui 3R . Cum
ijji aa δ=, , această bază este ortogonală. În consecinŃă, matricea A este ortogonală.
SoluŃia 2: Se foloseşte definiŃia matricei ortogonale:
3
900
090
009
9
1
122
212
221
3
1
122
212
221
3
1IAAt =
=
−
−
−
−
−
−
= .
164
2. Matrice simetrice
DefiniŃia 2.1: O matrice )(RnA M∈ se numeşte simetrică dacă tAA = ,
adică jiij aa = , pentru orice nji ,1, = .
Pentru a stabili o caracterizare a matricelor simetrice cu ajutorul produsului
scalar de pe spaŃiul euclidian nR , introdus în Capitolul IV, avem nevoie de următoarea:
Lema 2.2: Fie )()( ,1, RnnjiijaA M∈
== . Dacă 0, =Ayx , pentru orice
nyx R∈, , atunci nOA = .
DemonstraŃie: Fixăm ,...,2,1, nji ∈ arbitrari şi considerăm iex = , jey =
vectorii din nR având 1 pe poziŃia i, respectiv j, şi 0 în rest. Se verifică imediat, prin
calcul direct că ijjti aAeeAyx ==, şi astfel 0=ija . Cum indicii i, j au fost
consideraŃi arbitrari, putem conchide că nOA = .
PropoziŃia 2.3: O matrice )(RnA M∈ este simetrică dacă şi numai dacă
AyxyAx ,, =
pentru orice nyx R∈, . DemonstraŃie: Presupunem mai întâi că A este matrice simetrică. Atunci
tAA = . łinând cont de proprietăŃile transpusei unei matrice, rezultă că
yAxyAxyAxAyxAyx tttt ,)(, ==== .
Reciproc, presupunem că AyxyAx ,, = , pentru orice nyx R∈, . Deoarece
yAxyAxyAxyAx tttt ,)(, === , rezultă că yAxAyx t,, = , de unde obŃinem
0)(, =− yAAx t , pentru orice nyx R∈, . Folosind Lema 2.2 rezultă că
nt OAA =− , ceea ce înseamnă că matricea A este simetrică.
Teorema 2.5: Fie )(RnA M∈ o matrice simetrică. Atunci toate valorile
proprii ale lui A sunt reale. DemonstraŃie: Fie λ o valoare proprie a matricei A. łinând cont de ecuaŃia
caracteristică a matricei A şi de Teorema Fundamentală a Algebrei, rezultă că C∈λ .
Considerăm nz C∈ un vector propriu corespunzător valorii proprii λ . Atunci
βαλ i+= , cu R∈βα , şi iyxz += , cu nyx R∈, .

165
Deoarece z este vector propriu corespunzător valorii proprii λ , avem zAz λ= , de unde rezultă că ))(()( iyxiiyxA ++=+ βα , adică )( xyiyxiAyAx βαβα ++−=+ . ObŃinem astfel că
+=
−=
xyAy
yxAx
βα
βα.
Aplicând produsul scalar acestor două egalităŃi se ajunge la sistemul
+=
−=2
2
,,
,,
xyxAyx
yyxyAx
βα
βα.
Din PropoziŃia 2.3, AyxyAx ,, = . Astfel obŃinem că 22 ,, xyxyyx βαβα +=− ,
sau, echivalent, ( ) 022
=+ yxβ . Deoarece z este nenul, avem 022
≠+ yx şi
astfel 0=β , ceea ce înseamnă că R∈λ .
Din PropoziŃia 1.4, Capitolul VII rezultă că, la valori proprii distincte ale unei matrice )(RnA M∈ corespund vectori proprii liniar independenŃi. În cazul particular
al matricelor simetrice are loc următorul rezultat:
PropoziŃia 2.6: Dacă )(RnA M∈ este o matrice simetrică, atunci la valori
proprii diferite ale lui A corespund vectori proprii ortogonali. DemonstraŃie: Fie u şi v doi vectori proprii corespunzători valorilor proprii
21 λλ ≠ ale matricei A. Folosind proprietăŃile produsului scalar precum şi PropoziŃia 2.3, obŃinem succesiv:
vuvuAvuvAuvuvu ,,,,,, 2211 λλλλ ===== .
Rezultă că 0,)( 21 =− vuλλ . Deoarece 21 λλ ≠ , avem 0, =vu , adică vectorii u şi
v sunt ortogonali.
Teorema 2.7: Fie )(RnA M∈ o matrice simetrică. Atunci există o matrice
ortogonală )(RnC M∈ astfel încât
DACC =−1 , unde ),...,,( 21 ndiagD λλλ= este forma diagonală a matricei A.
DemonstraŃie: Vom utiliza metoda inducŃiei matematice după ordinul n al
matricei A. Pentru 1=n , teorema este evidentă, considerând )1(=C . Presupunem teorema adevărată pentru toate matricele simetrice de ordin 1−n .
Fie A o matrice simetrică de ordin n. Din Teorema 2.5 se obŃine existenŃa unei valori
proprii reale 1λ a matricei A. Considerăm nv R∈1 un vector propriu corespunzător
valorii proprii 1λ astfel încât 11 =v . Cu ajutorul Procedeului Gram-Schmidt (descris
în Capitolul IV) se poate construi o bază ortonormată ,...,, 21 nvvvB = a spaŃiului
vectorial nR . Construim matricea )(1 RnS M∈ având drept coloane vectorii

166
nvvv ,...,, 21 . Deoarece B este bază ortonormată va rezulta că 1S este matrice
ortogonală, deci tSS 11
1 =− . Vom obŃine:
11
111111111
1 )()( ASSASSSASASSASS tttttt −− ==== ,
deci 11
1 ASS − este matrice simetrică. Mai mult, prima coloană a acestei matrice este
111
1 )( eASS − , unde nte R∈= )0...,,0,1(1 . Deoarece 111 veS = rezultă că:
1111
11111
111
1111
1 )()( evSvSvASeASS λλλ ==== −−−− .
Deci am obŃinut că
=−
1
11
11 0
0
AASS
λ,
unde 1A este matrice simetrică de ordin 1−n . Conform ipotezei inductive, există o
matrice ortogonală )(1 RnC M∈ astfel încât 1111
1 DCAC =− , cu 1D matrice diagonală
de ordin 1−n .
Considerăm )(0
01
1RnC
S M∈
= . Evident S este matrice ortogonală şi
=
=
=−−
1
1
111
1
11
1
11
11
1
0
0
0
0
0
01
0
0
0
01
DCACCACSASSS tt
λλλ.
Punând SSC 1= , obŃinem că DACC =−1 , unde
=
1
1
0
0
DD
λ. Având în vedere că
produsul a două matrice ortogonale rămâne matrice ortogonală, rezultă că matricea C este ortogonală şi astfel teorema este demonstrată.
3. RotaŃii şi simetrii
Prima secŃiune a acestui capitol a fost dedicată studiului matricelor ortogonale. În cele ce urmează, vom determina forma matricelor ortogonale de ordinul 2 şi vom prezenta aplicaŃii ale acestora în domeniul transformărilor geometrice din plan.
Fie
=
dc
baA
o matrice ortogonală. Egalitatea matricială 2IAAt = este echivalentă cu sistemul de relaŃii:
=+
=+
=+
1
0
1
22
22
dc
bdac
ba
(1)
Distingem următoarele cazuri:

167
I) 0=a : sistemul de relaŃii (1) devine
=+
=
=
1
0
1
22
2
dc
bd
b
, care conduce la 1±=b ,
0=d , 1±=c , deci A poate fi una din matricele:
−
−
−
−
01
10,
01
10,
01
10,
01
10.
II) 0=c : sistemul de relaŃii (1) devine
=
=
=+
1
0
1
2
22
d
bd
ba
, care conduce la 1±=d ,
0=b , 1±=a . Astfel, A va fi una din matricele:
−
−
−
−
10
01,
10
01,
10
01,
10
01.
III) 0≠ac : rezultă că 0≠bd . Din a doua relaŃie a sistemului (1) obŃinem că
λ=−=c
b
d
a, de unde găsim da λ= şi cb λ−= . Sistemul de relaŃii (1) devine
=+
=+
1
1)(22
222
cd
cdλ , deci 12 =λ .
Dacă 1=λ , avem
−=
ab
baA .
Dacă 1−=λ , avem
−=
ab
baA .
Reunind rezultatele obŃinute în cele trei cazuri, putem conchide că matricele ortogonale de ordin 2 sunt de forma:
−
ab
ba sau
− ab
ba,
unde R∈ba, , cu 122 =+ ba . Egalitatea 122 =+ ba ne permite să găsim un unghi α astfel încât αcos=a şi αsin=b . Astfel, vom putea rescrie forma matricelor ortogonale:
−
αα
αα
cossin
sincos sau
− αα
αα
cossin
sincos. (2)
Aceste două tipuri de matrice au aplicaŃii importante la transformările geometrice din plan.
În primele două capitole s-a lucrat în spaŃiul tridimensional 3E al geometriei
elementare în care ne-am raportat la un sistem de coordonate Oxyz. Vom nota cu 2E planul de coordonate xOy, conceput ca o mulŃime de puncte.
DefiniŃia 3.1: Fie R∈α . AplicaŃia 22: EER →α , ')( MMR =α cu
proprietăŃile: 1. )',(),( MOdMOd = ;
2. α=)'(MOM ,
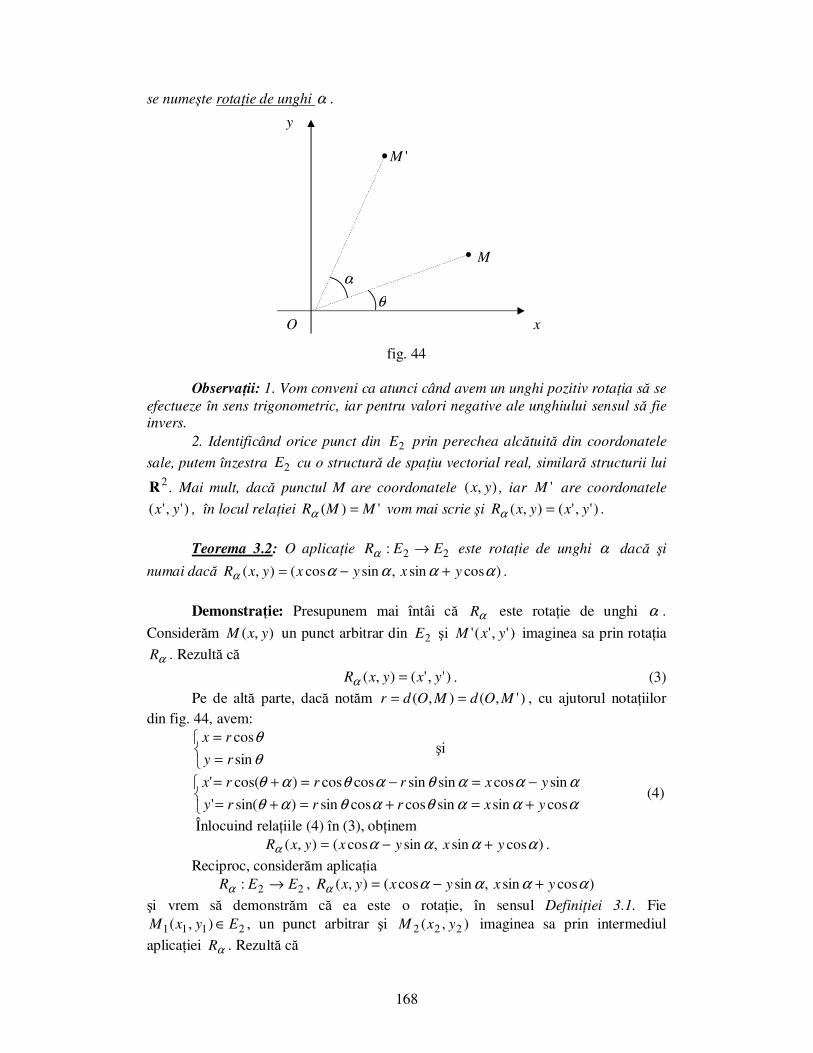
168
se numeşte rotaŃie de unghi α .
fig. 44
ObservaŃii: 1. Vom conveni ca atunci când avem un unghi pozitiv rotaŃia să se
efectueze în sens trigonometric, iar pentru valori negative ale unghiului sensul să fie invers.
2. Identificând orice punct din 2E prin perechea alcătuită din coordonatele
sale, putem înzestra 2E cu o structură de spaŃiu vectorial real, similară structurii lui 2R . Mai mult, dacă punctul M are coordonatele ),( yx , iar 'M are coordonatele
)','( yx , în locul relaŃiei ')( MMR =α vom mai scrie şi )','(),( yxyxR =α .
Teorema 3.2: O aplicaŃie 22: EER →α este rotaŃie de unghi α dacă şi
numai dacă )cossin,sincos(),( ααααα yxyxyxR +−= .
DemonstraŃie: Presupunem mai întâi că αR este rotaŃie de unghi α .
Considerăm ),( yxM un punct arbitrar din 2E şi )','(' yxM imaginea sa prin rotaŃia
αR . Rezultă că
)','(),( yxyxR =α . (3)
Pe de altă parte, dacă notăm )',(),( MOdMOdr == , cu ajutorul notaŃiilor din fig. 44, avem:
=
=
θ
θ
sin
cos
ry
rx şi
+=+=+=
−=−=+=
αααθαθαθ
αααθαθαθ
cossinsincoscossin)sin('
sincossinsincoscos)cos('
yxrrry
yxrrrx (4)
Înlocuind relaŃiile (4) în (3), obŃinem
)cossin,sincos(),( ααααα yxyxyxR +−= .
Reciproc, considerăm aplicaŃia
22: EER →α , )cossin,sincos(),( ααααα yxyxyxR +−=
şi vrem să demonstrăm că ea este o rotaŃie, în sensul DefiniŃiei 3.1. Fie
2111 ),( EyxM ∈ , un punct arbitrar şi ),( 222 yxM imaginea sa prin intermediul
aplicaŃiei αR . Rezultă că
θ
x
y
O
α
M
'M

169
+=
−=
αα
αα
cossin
sincos
112
112
yxy
yxx. (5)
Atunci:
),(
cossinsincos
)cossin()sincos(),(
121
21
221
221
221
221
211
2112
MOdyx
yxyx
yxyxMOd
=+=
=+++=
=++−=
αααα
αααα
Fie ),(),( 21 MOdMOdr == , θ unghiul format de sensul pozitiv al axei Ox
cu segmentul 1OM , iar ϕ unghiul format de sensul pozitiv al axei Ox cu segmentul
2OM (se convine că aceste unghiuri sunt măsurate în sens trigonometric). Rezultă că:
=
=
θ
θ
sin
cos
1
1
ry
rx (6)
şi
=
=
ϕ
ϕ
sin
cos
2
2
ry
rx (7)
Înlocuind relaŃiile (6) în (5) găsim
+=+=
+=−=
)sin(cossinsincos
)cos(sinsincoscos
2
2
αθαθαθ
αθαθαθ
rrry
rrrx (8)
Sistemele de relaŃii (7) şi (8) conduc la egalitatea πϕαθ k2+=+ , cu N∈k .
Rezultă că πθϕα k2+−= , ceea ce arată că α=)( 21OMM . Astfel, putem
conchide că aplicaŃia αR este rotaŃia de unghi α .
PropoziŃia 3.3: Orice rotaŃie este un endomorfism al lui 2E . DemonstraŃie: Fie α arbitrar şi considerăm rotaŃia de unghi α , αR .
Conform Teoremei 3.2, )cossin,sincos(),( ααααα yxyxyxR +−= . Se verifică
imediat, prin calcul direct, că această aplicaŃie satisface axiomele din definiŃia transformării liniare.
ObservaŃii: 1. Matricea asociată rotaŃiei de unghi α
22: EER →α , )cossin,sincos(),( ααααα yxyxyxR +−=
în baza canonică )1,0(,)0,1(=B este
−=
αα
αα
cossin
sincosRM .
Această matrice este cunoscută sub numele de matricea rotaŃiei de unghi α . Aşa cum am menŃionat în prima secŃiune, această matrice este ortogonală.
2. Din Teorema 3.2 rezultă că între coordonatele punctului iniŃial M şi coordonatele punctului 'M obŃinut în urma rotaŃiei există relaŃia:
−=
y
x
y
x
αα
αα
cossin
sincos
'
' (9)

170
PropoziŃia 3.4: Compunerea a două rotaŃii este tot o rotaŃie. Mai exact, dacă
22:, EERR →βα sunt rotaŃii de unghi α , respectiv β , atunci αβ RR o este rotaŃia
βα +R de unghi βα + .
DemonstraŃie: Din Teorema 3.2 avem:
)cos)cossin(sin)sincos(
,sin)cossin(cos)sincos((
)cossin,sincos(),)((
βααβαα
βααβαα
ααααβαβ
yxyx
yxyx
yxyxRyxRR
++−
+−−=
+−=o
))cos()sin(,)sin()cos((
)coscoscossinsinsinsincos
,sincossinsincossincoscos(
βαβαβαβα
βαβαβαβα
βαβαβαβα
++++−+=
++−
−−−=
yxyx
yxyx
yxyx
de unde rezultă că αβ RR o este rotaŃia βα +R de unghi βα + .
ObservaŃie: În general compunerea endomorfismelor nu este comutativă.
Totuşi, compunerea rotaŃiilor este comutativă, acest lucru fiind clar, din propoziŃia precedentă: βααββααβ RRRRRR oo === ++ .
ExerciŃiul 1: Fie 654321 AAAAAA un hexagon regulat. Ştiind că )0,7(1A şi că
diagonalele se intersectează în )0,0(O , să se determine coordonatele celorlalte vărfuri ale hexagonului.
fig. 45
SoluŃie: Din ipoteză, reiese că hexagonul este poziŃionat, în raport cu reperul
cartezian xOy, ca în fig. 45. Este clar că punctele 65432 ,,,, AAAAA se obŃin prin
rotaŃii de unghiuri multipli de 3π , aplicate punctului 1A . Din relaŃia (9) rezultă:
x O
y
1A
2A 3A
4A
5A 6A

171
−
=
0
7
3cos
3sin
3sin
3cos
2
2
ππ
ππ
y
x, deci
2
37,
2
72A
−
=
0
7
3
2cos
3
2sin
3
2sin
3
2cos
3
3
ππ
ππ
y
x, deci
−
2
37,
2
73A
−=
0
7
cossin
sincos
4
4
ππ
ππ
y
x, deci )0,7(4 −A
−
=
0
7
3
4cos
3
4sin
3
4sin
3
4cos
5
5
ππ
ππ
y
x, deci
−−
2
37,
2
75A
−
=
0
7
3
5cos
3
5sin
3
5sin
3
5cos
6
6
ππ
ππ
y
x, deci
−
2
37,
2
76A .
DefiniŃia 3.5: Fie )(d o dreaptă fixată din 2E . AplicaŃia
22: EESd → , ')( MMSd = ,
unde 'M este simetricul geometric al punctului M faŃă de dreapta )(d se numeşte
simetrie de axă )(d .
Vom studia mai întâi cazul particular în care dreapta )(d este chiar axa de
coordonate Ox. Fie ),( yxM un punct arbitrar din 2E şi )','(' yxM imaginea lui M
prin aplicaŃia OxS : ),()','( yxSyx Ox= .
fig. 46
Deoarece )','(' yxM este simetricul punctului ),( yxM faŃă de axa Ox, evident avem
−=
=
yy
xx
'
'.
x
y
O
M
'M
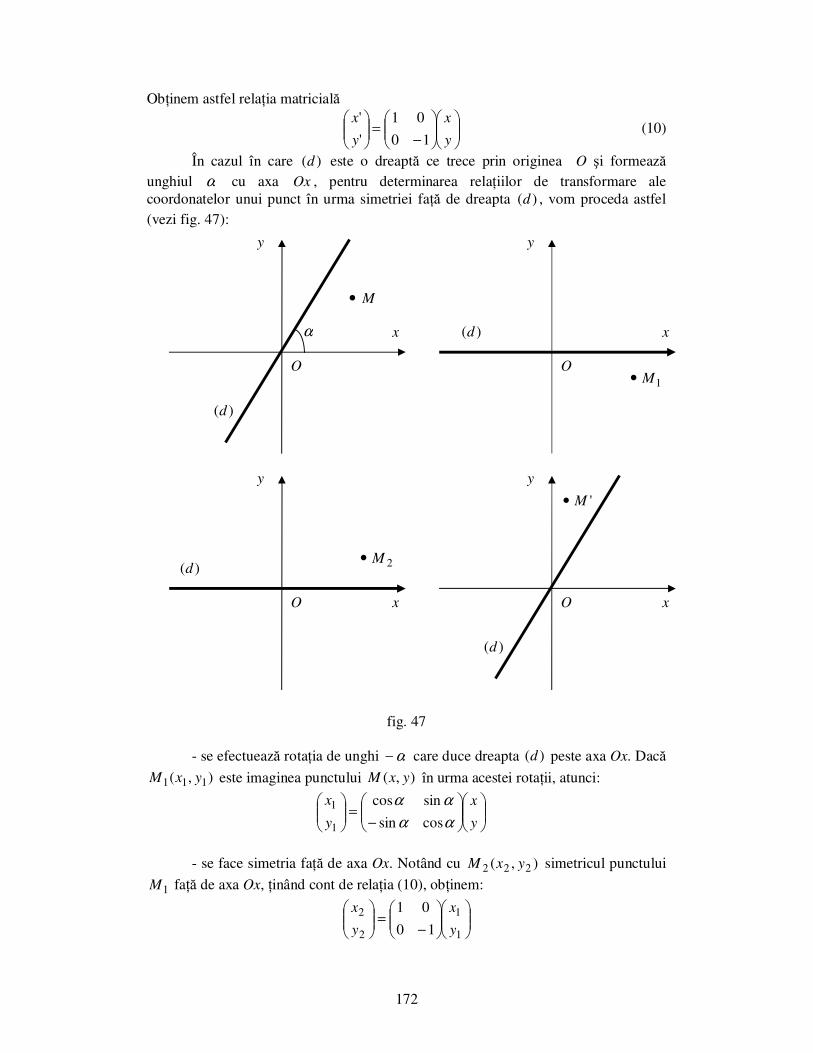
172
ObŃinem astfel relaŃia matricială
−=
y
x
y
x
10
01
'
' (10)
În cazul în care )(d este o dreaptă ce trece prin originea O şi formează unghiul α cu axa Ox , pentru determinarea relaŃiilor de transformare ale coordonatelor unui punct în urma simetriei faŃă de dreapta )(d , vom proceda astfel (vezi fig. 47):
fig. 47
- se efectuează rotaŃia de unghi α− care duce dreapta )(d peste axa Ox. Dacă
),( 111 yxM este imaginea punctului ),( yxM în urma acestei rotaŃii, atunci:
−=
y
x
y
x
αα
αα
cossin
sincos
1
1
- se face simetria faŃă de axa Ox. Notând cu ),( 222 yxM simetricul punctului
1M faŃă de axa Ox, Ńinând cont de relaŃia (10), obŃinem:
−=
1
1
2
2
10
01
y
x
y
x
• 2M
• 'M
x
y y
O O
)(d
)(d
x
• M
x
y
O
y
O
)(d
)(d
• 1M
x α

173
- în final, se efectuează o nouă rotaŃie de unghi α care aduce dreapta )(d în
poziŃia iniŃială. Dacă )','(' yxM este imaginea punctului ),( 222 yxM în urma acestei rotaŃii, atunci:
−=
2
2
cossin
sincos
'
'
y
x
y
x
αα
αα
Aşadar, legătura dintre coordonatele punctului M şi ale simetricului său 'M
faŃă de dreapta )(d este dată de relaŃia matricială
−
−
−=
y
x
y
x
αα
αα
αα
αα
cossin
sincos
10
01
cossin
sincos
'
' (11)
Efectuând înmulŃirile din membrul drept, obŃinem:
−=
y
x
y
x
αα
αα
2cos2sin
2sin2cos
'
' (12)
ObservaŃie: Matricea
−=
αα
αα
2cos2sin
2sin2cosSM ,
asociată simetriei faŃă de dreapta )(d , este şi ortogonală şi simetrică. Aceste două
proprietăŃi conduc la relaŃia 22 IM S = . Interpretarea geometrică a acestui rezultat
este următoarea: dacă se efectuează o simetrie de două ori se obŃine punctul iniŃial: MMSS dd =))(( .
ExerciŃiul 2: Să se determine coordonatele simetricului punctului )1,5(M faŃă
de dreapta xyd 3:)( = .
fig. 48
SoluŃie: Deoarece dreapta )(d trece prin origine, putem aplica relaŃia (12).
Dacă notăm cu α unghiul pe care-l face )(d cu sensul pozitiv al axei Ox, atunci,
M•
O x
y
(d)

174
Ńinând cont de interpretarea pantei unei drepte, rezultă că 3tg =α , de unde găsim
3
πα = .
Astfel, coordonatele lui 'M , simetricul punctului M faŃă de dreapta )(d , vor fi date de egalitatea:
−
=
1
5
3
2cos
3
2sin
3
2sin
3
2cos
'
'ππ
ππ
y
x,
adică
−
=
1
5
2
1
2
32
3
2
1
'
'
y
x
ObŃinem
++−
2
135,
2
35'M .
4. ExerciŃii
1. Să se studieze care dintre următoarele matrice sunt ortogonale:
−
−
−
184
814
447
9
1 ;
−−−
−−+
121
12
11
2
11
12
11
2
11
2
1.
2. Să se demonstreze că matricea
−++
+−+
++−
++=
αααα
αααα
αααα
ααα
1
1
1
1
1
2
2
2
2A
este ortogonală, pentru orice R∈α .
3. DemonstraŃi că orice matrice triunghiulară ortogonală este matrice diagonală.
4*. Fie )(RnA M∈ o matrice ortogonală cu 1)( =Adet . Dacă n este impar,
să se demonstreze că 1 este valoare proprie a matricei A.
175
5. Fie )(RnA M∈ o matrice simetrică. Dacă A este inversabilă, atunci 1−A
este matrice simetrică? 6. Se consideră pătratul ABCD cu vârful )2,5(A . Ştiind că diagonalele
pătratului se intersectează în )0,0(O , să se determine coordonatele celorlalte vârfuri ale pătratului.
7. Pentru pătratul din ExerciŃiul 6, fie ',',',' DCBA simetricele vârfurilor
A,B,C şi respectiv D faŃă de axa Oy. Ce reprezintă figura '''' DCBA ? 8. Să se determine simetricul versorului i
r faŃă de dreapta xy −= .
176
Capitolul IX
Forme biliniare. Forme pătratice
1. Forme biliniare
Pe tot parcursul acestui capitol cu V vom desemna un spaŃiu vectorial real. DefiniŃia 1.1: O aplicaŃie R→×VVF : care satisface proprietăŃile: 1. ),(),(),( zyFzxFzyxF βαβα +=+ , pentru orice Vzyx ∈,, şi R∈βα , ;
2. ),(),(),( zxFyxFzyxF βαβα +=+ , pentru orice Vzyx ∈,, şi R∈βα , , se numeşte formă biliniară.
ObservaŃie: În concordanŃă cu PropoziŃia 1.2 din Capitolul V, condiŃiile 1. şi
2. din definiŃia precedentă semnifică faptul că aplicaŃia F este liniară în raport cu prima, respectiv a doua variabilă. Astfel, denumirea de formă biliniară este pe deplin justificată.
DefiniŃia 1.2: O formă biliniară R→×VVF : se numeşte simetrică dacă
),(),( xyFyxF = , pentru orice Vyx ∈, .
DefiniŃia 1.3: O formă biliniară simetrică F se numeşte pozitiv (negativ)
semidefinită dacă 0),( ≥xxF (resp. 0),( ≤xxF ), pentru orice Vx ∈ . Dacă în plus
0),( =xxF numai pentru Vx 0= , F se numeşte pozitiv (resp. negativ) definită.
Exemple: 1. Fie V un spaŃiu euclidian cu un produs scalar R→×VVyx :, .
Atunci aplicaŃia R→×VVF : , yxyxF ,),( = este o formă biliniară simetrică,
pozitiv definită, acest lucru probându-se imediat, având în vedere axiomele din definiŃia produsului scalar.
2. Dacă R→VLL :, 21 sunt două transformări liniare, atunci R→×VVF : ,
)()(),( 21 yLxLyxF = este o formă biliniară. Evident, F este simetrică dacă şi numai
dacă 21 LL = .

177
Fie V un spaŃiu vectorial real de dimensiune n, ,...,, 21 neeeB = o bază a lui
V şi R→×VVF : o formă biliniară. Dacă ∑=
=n
iiiexx
1
şi ∑=
=n
jjj eyy
1
sunt doi
vectori arbitrari din V, atunci
),(,),(1 111
ji
n
i
n
jji
n
jjj
n
iii eeFyxeyexFyxF ∑∑∑∑
= ===
=
= . (1)
Pentru nji ,1, = , notăm ),( jiij eeFa = . Astfel, relaŃia (1) conduce la
∑∑= =
=n
i
n
jjiij yxayxF
1 1
),( , (2)
ceea ce ne permite să conchidem că forma biliniară F este perfect determinată de matricea
njiijaA,1,
)(=
= .
DefiniŃia 1.4: Matricea )()( ,1, RnnjiijaA M∈
== construită mai sus se
numeşte matricea asociată formei biliniare F în baza B. PropoziŃia 1.5: Fie V un spaŃiu vectorial real finit dimensional şi
R→×VVF : o formă biliniară. Atunci F este simetrică dacă şi numai dacă matricea asociată lui F într-o bază oarecare este simetrică.
DemonstraŃie: Considerăm ,...,, 21 neeeB = o bază arbitrară a lui V şi fie
njiijaA,1,
)(=
= matricea asociată lui F în baza B.
Presupunem mai întâi că F este formă biliniară simetrică. Atunci
jiijjiij aeeFeeFa === ),(),( ,
pentru orice nji ,1, = , deci A este matrice simetrică.
Reciproc, dacă A este matrice simetrică, atunci jiij aa = , pentru orice
nji ,1, = . Fie Vyx ∈, doi vectori arbitrari având scrierile în baza B: ∑=
=n
iiiexx
1
şi
∑=
=n
jjj eyy
1
. Rezultă că ∑∑∑∑= ===
===n
iji
n
jji
n
jjj
n
iii eeFyxeyexFyxF
1 111
),(),(),(
∑ ∑∑∑∑∑∑∑= === === =
====n
i
n
iii
n
jjj
n
iij
n
jjiji
n
jji
n
iij
n
jji xyFexeyFeeFyxayxayx
1 111 111 1
),(),(),( şi
astfel putem conchide că forma biliniară F este simetrică.
Aşa cum s-a văzut anterior, matricea asociată unei forme biliniare R→×VVF : depinde de baza spaŃiului vectorial V. În continuare, vom studia cum
se modifică această matrice o dată cu schimbarea bazei spaŃiului vectorial. Teorema 1.6: Fie V un spaŃiu vectorial de dimensiune n, ,...,, 211 neeeB = şi
,...,, 212 nfffB = două baze ale lui V şi R→×VVF : o formă biliniară. Dacă

178
njiijaA,1,
)(=
= şi njiijbB
,1,)(
== sunt matricele ataşate lui F în bazele 1B şi
respectiv 2B , atunci
ACCB t= , unde
njiijcC,1,
)(=
= este matricea de trecere de la baza 1B la baza 2B .
DemonstraŃie: Din definiŃia matricei de trecere de la o bază la alta pentru un
spaŃiu vectorial avem
∑=
=n
jjjii ecf
1
.
Folosind DefiniŃia 1.4 obŃinem:
===== ∑∑∑∑∑∑= == ===
n
k
n
lklljki
n
k
n
llkljki
n
lllj
n
kkkijiij acceeFccececFffFb
1 11 111
),(),(),(
lj
n
l
n
kklki cac∑ ∑
= =
1 1
, pentru orice nji ,1, = , de unde rezultă că ACCB t= .
ExerciŃiu: Se consideră aplicaŃia
RRR →× 33:F , 3322122111 32),( yxyxyxyxyxyxF ++++= ,
unde ),,( 321 xxxx = şi ),,( 321 yyyy = .
a) Să se arate că F este o formă biliniară. b) Este F simetrică? Dar pozitiv definită? c) DeterminaŃi matricea asociată acestei forme biliniare în baza canonică a
spaŃiului vectorial 3R .
SoluŃie: a) Fie 3321321321 ),,(),,,(),,,( R∈=== zzzzyyyyxxxx şi
R∈βα , , arbitrari. Atunci:
++++++++=+ 222122211111 )(2)()()(),( zyxzyxzyxzyxzyxF βαβαβαβαβα
++++++++=+ 2222121221211111333 22)(3 zyzxzyzxzyzxzyzxzyx βαβαβαβαβα
++++++++=+ 12211133221221113333 ()32(33 zyzyzyzxzxzxzxzxzyzx βαβα
),(),()32 3322 zyFzxFzyzy βα +=+ .
Similar se arată că ),(),(),( zxFyxFzyxF βαβα +=+ . Astfel, F este o formă biliniară.
b) +++=++++= 1221113322122111 32),( xyxyxyyxyxyxyxyxyxF
),(32 3322 xyFxyxy =+ , pentru orice 3, R∈yx , deci F este simetrică.
Pe de altă parte,
03)(322),( 23
22
221
23
2221
21 ≥+++=+++= xxxxxxxxxxxF
cu egalitate dacă şi numai dacă 03221 ===+ xxxx , adică 0321 === xxx .
Aşadar, F este şi pozitiv definită.
c) Baza canonică a lui 3R este )1,0,0(,)0,1,0(,)0,0,1( 321 ==== eeeB .

179
Deoarece 2),(,1),(,0),(,1),(,1),( 2212312111 ===== eeFeeFeeFeeFeeF ,
3),(,0),(,0),(,0),( 33231332 ==== eeFeeFeeFeeF , matricea asociată formei
pătratice F în baza B este:
=
300
021
011
A .
ObservaŃie: Simetria matricei A reprezintă o confirmare a simetriei formei
biliniare F.
2. Forme pătratice. Reducerea la forma canonică
DefiniŃia 2.1: Fie F o formă biliniară simetrică. AplicaŃia R→VQ : , ),()( xxFxQ = (1)
se numeşte formă pătratică asociată formei biliniare simetrice F. În acest context, vom spune că F este polara formei pătratice Q.
Aşa cum reiese din această definiŃie, orice formă biliniară simetrică induce o unică formă pătratică. Vom arăta că este valabilă şi reciproca, adică oricărei forme pătratice i se asociază o unică formă biliniară simetrică. Într-adevăr,
)(),(2)(),(),(2),(),()( yQyxFxQyyFyxFxxFyxyxFyxQ ++=++=++=+ , de unde rezultă că
)]()()([2
1),( yQxQyxQyxF −−+= , (2)
pentru orice Vyx ∈, . S-a obŃinut astfel următorul rezultat: PropoziŃia 2.2: Între mulŃimea formelor pătratice definite pe spaŃiul vectorial
V şi mulŃimea formelor biliniare simetrice definite pe VV × există o corespondenŃă bijectivă.
Exemple: 1. Fie V un spaŃiu euclidian cu un produs scalar R→×VVyx :, .
Aşa cum am văzut în secŃiunea precedentă, aplicaŃia R→×VVF : , yxyxF ,),( =
este o formă biliniară simetrică. Aceasta induce forma pătratică R→VQ : , 2
,),()( xxxxxFxQ === .
2. AplicaŃia
RR →3:Q , 322123
22
21 537)( xxxxxxxxQ +−++= ,
unde ),,( 321 xxxx = , reprezintă o formă pătratică. Polara acestei forme pătratice este

180
−+++++=−−+= 233
222
211 )(3)(7)[(
2
1)]()()([
2
1),( yxyxyxyQxQyxQyxF
−−+−−−+++++ 322123
22
2133222211 537))((5))(( xxxxxxxyxyxyxyx
+−−++=−+−− 1221332211322123
22
21 2
1
2
137]537 yxyxyxyxyxyyyyyyy
2332 2
5
2
5yxyx + .
În continuarea acestei secŃiuni vom lucra sub ipoteza că V este spaŃiu vectorial
real de dimensiune n. DefiniŃia 2.3: Fie B o bază a spaŃiului vectorial V şi R→VQ : o formă
pătratică. Se numeşte matrice asociată formei pătratice Q în baza B matricea asociată polarei sale F în aceeaşi bază.
ObservaŃie: Deoarece polara unei forme pătratice este o formă biliniară
simetrică, din definiŃia precedentă şi din PropoziŃia 1.5 rezultă că matricea asociată unei forme pătratice este întotdeauna simetrică.
Fie x un vector arbitrar al spaŃiului vectorial V, având scrierea în baza
,...,, 21 neeeB = : ∑=
=n
iiiexx
1
. Atunci
∑∑∑∑∑∑= == ===
====n
i
n
jjiij
n
iji
n
jji
n
jjj
n
iii xxaeeFxxexexFxxFxQ
1 11 111
),(),(),()( .
Aşadar, prin fixarea unei baze B a spaŃiului vectorial V, pentru forma pătratică Q se obŃine o scriere de forma
∑≤≤
=nji
jiij xxaxQ,1
)( (3)
unde ija reprezintă componentele matricei A ataşate formei pătratice Q în baza B (şi
deci, conform observaŃiei anterioare, avem jiij aa = , pentru orice nji ,1, = ). Evident,
o dată cu schimbarea bazei spaŃiului vectorial se va schimba şi expresia (3) a formei pătratice.
DefiniŃia 2.4: Spunem că forma pătratică R→VQ : este redusă la forma
canonică dacă se determină pentru Q o scriere de forma
∑=
=n
iii xbxQ
1
2)( , (4)
într-o anumită bază a lui V.
ObservaŃie: Având în vedere că în scrierea (3) a unei forme pătratice apar două tipuri de termeni (termeni la pătrat, pentru ji = , şi termeni micşti, pentru
ji ≠ ) , a reduce o formă pătratică la forma canonică înseamnă de fapt a găsi o scriere în care să apară numai termeni cu pătrate.

181
Vom prezenta trei metode pentru reducerea formelor pătratice la forma canonică.
Metoda lui Gauss
Teorema 2.5 (Gauss): Pentru orice formă pătratică R→VQ : există o bază
B a lui V în care forma pătratică este redusă la forma canonică. DemonstraŃie: Fie ,...,, 21 neeeB = bază a lui V faŃă de care forma pătratică
Q are expresia ∑≤≤
=nji
jiij xxaxQ,1
)( .
Distingem două cazuri: (I) Există cel puŃin un ,...,2,1 ni ∈ astfel încât 0≠iia (în expresia formei
pătratice apare cel puŃin un termen la pătrat). Printr-o eventuală renumerotare a vectorilor bazei B se poate presupune că 011 ≠a . Atunci, în expresia formei biliniare Q, vom grupa termenii astfel:
−+++=++= ∑∑≤≤=
21212111
11,2211
2111 )...(
12)( nn
njijiij
n
jjj xaxaxa
axxaxxaxaxQ
∑∑∑≤≤≤≤≤≤
++++=+nji
jiijnnnji
jiijnji
jiji xxaxaxaxaa
xxaxxaaa ,2
'21212111
11,2,211
11)...(
11,
unde 11
11'
a
aaaa
jiijij −= , pentru orice nji ≤≤ ,2 .
Notând
=
=
+++=
nn
nn
xx
xx
xaxaxax
'
2'2
1212111'1
.....
...
(5)
obŃinem
( ) ∑≤≤
+=nji
jiij xxaxa
xQ,2
'''2'1
11
1)( . (6)
''2
'1 ,...,, nxxx reprezintă componentele vectorului x în baza ,...,,' ''
2'1 neeeB = , faŃă de
care forma pătratică Q are expresia (6). De remarcat că suma ∑≤≤ nji
jiij xxa,2
''' care apare
în (6) este o formă pătratică în 1−n variabile. Astfel, după cel mult 1−n paşi (aplicând eventual şi procedeul descris în cazul (II) ), vom obŃine o bază
,...,, 21 neeeB = a lui V faŃă de care Q are expresia canonică: 22
222
11 ...)( nn xxxxQ ααα +++= .
(II) ToŃi coeficienŃii iia sunt nuli (în expresia formei pătratice apar numai
termeni micşti). Lucrând sub presupunerea că forma pătratică Q este nenulă, există

182
,...,2,1, nji ∈ , ji ≠ , astfel încât 0≠ija . Printr-o eventuală renumerotare a
vectorilor din baza B se poate presupune că 012 ≠a . Cu ajutorul schimbărilor de coordonate
=
=
−=
+=
'
'33
'2
'11
'2
'11
....
nn xx
xx
xxx
xxx
vom obŃine
( ) ( ) ...2)(2'
22'
112 +
−= xxaxQ (7)
Deoarece în această expresie avem cel puŃin un termen la pătrat, se poate aplica în continuare procedeul descris la cazul (I).
ObservaŃie: Procedeul descris în demonstraŃia anterioară reprezintă metoda lui Gauss de reducere a formelor pătratice la forma canonică.
ExerciŃiul 1: Se consideră forma pătratică RR →3:Q , care într-o anumită
bază B a spaŃiului 3R are expresia 312123
22
21 224)( xxxxxxxxQ +−++= . Cu
ajutorul metodei lui Gauss, să se reducă această formă pătratică la forma canonică. SoluŃie: Deoarece în expresia formei pătratice apar termeni la pătrat, ne
situăm în cazul (I) al metodei lui Gauss. Urmând procedeul descris în această situaŃie, vom avea:
23
232
2321
3222
2321
3222
2321
23
2232
23
22
2321
23
223121
21
3
1)3(
3
1)(
)69(3
1)(
23)(
42)(
4)22()(
xxxxxx
xxxxxx
xxxxxx
xxxxxxxxx
xxxxxxxxQ
−+++−=
=+++−=
=+++−=
=+++−−+−=
=+++−=
Cu notaŃiile:
=
+=
+−=
33
322
3211
3
xx
xxx
xxxx
vom obŃine forma canonică a formei pătratice:
23
22
21 3
1
3
1)( xxxxQ −+= .

183
Pentru a determina baza ,, 321 eeeB = în raport cu care s-a obŃinut această
formă canonică, se exprimă mai întâi componentele iniŃiale 321 ,, xxx ale vectorului x
în funcŃie de componentele 321 ,, xxx din baza B :
=
−=
−+=
33
322
3211
3
1
3
13
4
3
1
xx
xxx
xxxx
Din PropoziŃia 5.3, Capitolul III, obŃinem că matricea de trecere de la baza iniŃială ,, 321 eeeB = la baza B este
−−
=
13
1
3
4
03
1
3
1
001
C .
Rezultă că vectorii bazei B vor fi:
=
−=
−+=
33
322
3211
3
1
3
13
4
3
1
ee
eee
eeee
ExerciŃiul 2: Să se reducă la forma canonică prin metoda lui Gauss forma
pătratică
RR →3:Q , 133221)( xxxxxxxQ ++= ,
specificând şi transformarea de coordonate care se efectuează.
SoluŃie: Deoarece în expresia formei pătratice apar numai termeni micşti, ne situăm în cazul (II) al metodei lui Gauss. În consecinŃă, facem schimbările de coordonate:
=
−=
+=
'33
'2
'12
'2
'11
xx
xxx
xxx
. (8)
Astfel, forma pătratică devine:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )2'3
2'2
2'3
'1
2'2
'3
'1
2'1
'3
'1
2'2
2'1
'2
'1
'3
'3
'2
'1
2'2
2'1
22
)(
xxxx
xxxxxxxx
xxxxxxxxxQ
−−+=
=−
+=+−=
=++−+−=

184
Se efectuează o nouă schimbare de coordonate
=
=
+=
'33
'22
'3
'11
xx
xx
xxx
(9)
în urma căreia va rezulta forma canonică 23
22
21)( xxxxQ −−= .
Din sistemele de relaŃii (8) şi (9) se obŃin relaŃiile de transformare ale coordonatelor:
=
−=
++=
33
212
3211
2
1
2
12
1
2
1
xx
xxx
xxxx
Metoda lui Jacobi
Teorema 2.6 (Jacobi): Fie V un spaŃiu vectorial, ,...,, 21 neeeB = o bază a
lui V şi R→VQ : o formă pătratică având expresia ∑≤≤
=nji
jiij xxaxQ,1
)( în baza B.
Dacă matricea )()(,1,
RnnjiijaA M∈=
= asociată formei pătratice Q în baza B are
toŃi minorii principali
111 a=∆ , 2212
12112 aa
aa=∆ ,
332313
232212
131211
3
aaa
aaa
aaa
=∆ ,..., )(Adetn =∆
nenuli, atunci există o bază ,...,, 21 neeeB = a lui V faŃă de care Q are forma
canonică:
2123
3
222
2
121
1
...1
)( nn
n xxxxxQ∆
∆++
∆
∆+
∆
∆+
∆= − . (10)
DemonstraŃie: Fie R→×VVF : polara formei pătratice Q. Căutăm vectorii
bazei B de forma:
+++=
+++=
+=
=
nnnnnn
iiiiii
ececece
ececece
ecece
ece
........
...........................
...
..........................
2211
2211
2221122
1111
(11)
unde coeficienŃii ijc se determină din condiŃiile

185
0),( =ji eeF , pentru orice nij ≤<≤1 (12)
şi 1),( =ii eeF , pentru ni ,1= . (13)
(Aceste ultime relaŃii sunt deduse din condiŃia ca matricea asociată formei pătratice Q în baza B să fie ),...,,( 2211 nncccdiag . )
Fixăm un ,...,2,1 ni ∈ arbitrar. Deoarece
( ) kj
i
kkijk
i
kki
i
kjkkiji aceeFceecFeeF ∑∑∑
===
==
=
111
,,),( ,
din relaŃiile (12) şi (13) , Ńinând cont că jkkj aa = , obŃinem sistemul:
=+++
=+++
=+++
=+++
−−−
1...
0...
...............................................
0...
0...
2211
,121,211,1
2222112
1212111
iiiiiiii
iiiiiiii
iiiii
iiiii
cacaca
cacaca
cacaca
cacaca
.
Se observă că determinantul acestui sistem este minorul principal i∆ , care, conform
ipotezei, este nenul. Astfel, din regula lui Cramer, sistemul este compatibil determinat şi în plus
i
i
iii
iii
i
iii
aa
aa
aa
c∆
∆=
∆= −
−
−−−
−
1
,11
1,11,1
1,111
1...
0...
............
0...
1.
Având în vedere că matricea
=
nn
n
n
c
cc
ccc
C
...00
............
...0
...
222
11211
are determinantul 01
...1
...)( 1
2
1
12211 ≠
∆=
∆
∆
∆
∆
∆== −
ii
inncccCdet şi că
,...,, 21 neeeB = este o bază a lui V, din sistemul de relaŃii (11) rezultă că şi
,...,, 21 neeeB = este o bază a lui V. Deoarece
=
≠=
jic
jieeF
iiji pentru ,
pentru ,0),( ,
concluzia teoremei este acum clară.
ObservaŃie: Spre deosebire de metoda lui Gauss, care se poate aplica pentru orice formă pătratică, în cazul metodei Jacobi suntem condiŃionaŃi de faptul ca toŃi minorii principali ai matricei ataşate formei pătratice în baza iniŃială să fie nenului. Astfel, dacă măcar unul dintre aceşti minori este zero, atunci metoda lui Jacobi nu poate fi aplicată şi trebuie utilizată o altă metodă.

186
ExerciŃiul 3: Utilizând metoda lui Jacobi, să se reducă la forma canonică următoarea forma pătratică:
RR →3:Q , 32312122
21 44233)( xxxxxxxxxQ ++−+= ,
unde ),,( 321 xxxx = este un vector arbitrar din 3R .
SoluŃie: Matricea asociată formei pătratice Q în baza canonică a lui 3R este:
−
−
=
022
231
213
A .
Minorii principali ai acestei matrice sunt:
031 ≠=∆ , 0831
132 ≠=
−
−=∆ , 032
022
231
213
3 ≠−=−
−
=∆ ,
deci putem aplica metoda lui Jacobi. Forma canonică a formei pătratice Q va fi:
23
22
21
23
3
222
2
121
1 4
1
8
3
3
11)( xxxxxxxQ −+=
∆
∆+
∆
∆+
∆= .
Metoda transformărilor ortogonale
Această metodă de reducere la forma canonică, spre deosebire de celelalte
două metode prezentate anterior, se aplică numai formelor pătratice definite pe spaŃii euclidiene.
Teorema 2.7: Fie V un spaŃiu euclidian de dimensiune n şi R→VQ : o
formă pătratică. Atunci există o bază ortonormată a lui V în raport cu care forma pătratică Q este redusă la forma canonică.
DemonstraŃie: În concordanŃă cu Teorema 2.6, Capitolul IV, există o bază
ortonormată ,...,, 21 neeeB = a lui V . Fie njiijaA
,1,)(
== matricea asociată formei
pătratice Q în baza B. Deoarece A este matrice simetrică, din Teorema 2.7, Capitolul VIII rezultă existenŃa unei matrice ortogonale )()(
,1,RnnjiijcC M∈
== cu
proprietatea că tCDCA = , (14)
unde ),...,,( 21 ndiagD λλλ= este forma diagonală a matricei A.
Construim baza ,...,, 21 neeeB = a lui V astfel încât matricea de trecere de la
baza B la B să fie chiar C:
+++=
+++=
+++=
nnnnnn
nn
nn
ececece
ececece
ececece
...
..............................................
...
...
2211
22221122
12211111

187
łinând cont că ,...,, 21 neeeB = este o bază ortonormată, iar C este o matrice
ortogonală vom obŃine relaŃiile:
1,,,1
2
,111
==== ∑∑∑∑=≤≤==
n
kikjk
njkijik
n
jjij
n
kkikii ceeccececee ,
pentru ni ,1= , şi respectiv
0,,,1,111
==== ∑∑∑∑=≤≤==
n
kjkikpk
npkjpik
n
ppjp
n
kkikji cceeccececee ,
pentru orice ji ≠ . Aşadar, ,...,, 21 neeeB = este o bază ortonormată a lui V.
Notând cu F polara formei pătratice Q, din Teorema 1.6 şi din relaŃia (14) rezultă că matricea asociată lui F în baza B este ),...,,( 21 ndiagD λλλ= şi, în
consecinŃă, forma pătratică Q va avea scrierea în baza B : 22
222
11 ...)( nn xxxxQ λλλ +++= ,
adică este redusă la forma canonică.
ObservaŃie: Deoarece spaŃiile vectoriale de tipul nR sunt spaŃii euclidiene, această metodă poate fi folosită în majoritatea exerciŃiilor având drept cerinŃă reducerea formelor pătratice la forma canonică.
Din demonstraŃia teoremei precedente se deduce următorul algoritm de reducere a unei forme pătratice R→VQ : la forma canonică, unde V este spaŃiu euclidian de dimensiune n:
- Etapa 1: se scrie matricea A ataşată formei pătratice; - Etapa 2: se calculează, prin rezolvarea ecuaŃiei caracteristice
0)( =− nIAdet λ , valorile proprii iλ , pi ≤≤1 , având ordinele de
multiplicitate in şi se determină subspaŃiile vectorilor proprii )( iSpv λ ,
corespunzătoare acestor valori proprii; - Etapa 3: Pentru fiecare subspaŃiu )( iSpv λ se determină câte o bază
ortonormată iB ;
- Etapa 4: Forma canonică a formei pătratice date este: 22
222
11 ...)( nn xxxxQ λλλ +++= ,
cu menŃiunea că în această scriere fiecare valoare proprie apare de un număr de ori egal cu ordinul de multiplicitate. Baza ortonormată în care se obŃine această formă canonică este nBBBB ∪∪∪= ...21 .
ExerciŃiul 4: Să se reducă la forma canonică, prin metoda transformărilor ortogonale, următoarea formă pătratică.:
RR →3:Q , 32312122
21 44233)( xxxxxxxxxQ ++−+= ,
unde ),,( 321 xxxx = este un vector arbitrar din 3R , specificând şi o bază
ortonormată în care s-a obŃinut această formă.

188
SoluŃie: Matricea asociată formei pătratice Q în baza canonică a lui 3R este:
−
−
=
022
231
213
A .
Vom determina valorile proprii ale matricei A, rezolvând ecuaŃia caracteristică
0)( 3 =− IAdet λ sau echivalent 0326
22
231
21323 =−+−=
−
−−
−−
λλ
λ
λ
λ
. Se
obŃin 4,2 321 ==−= λλλ .
Vectorii proprii corespunzători valorii proprii 21 −=λ sunt daŃi de sistemul:
=++
=++−
=+−
0222
025
025
321
321
321
xxx
xxx
xxx
, având soluŃia
=
−=
−=
α
α
α
23
2
1
x
x
x
, cu *R∈α .
SubspaŃiul invariant corespunzător valorii proprii 6 este /)2,,()2( R∈−−=− ααααSvp .
O bază pentru )2(−Svp este )2,1,1( −− , de unde obŃinem baza ortonormată
−−=
6
2,
6
1,
6
11B .
Pentru valoarea proprie 4, vectorii proprii sunt daŃi de sistemul:
=−+
=+−−
=+−−
0422
02
02
321
321
321
xxx
xxx
xxx
, adică
=
=
+−=
β
α
βα
3
2
1 2
x
x
x
, cu R∈βα , , 022 ≠+ βα .
SubspaŃiul invariant corespunzător valorii proprii 4 este ,/),,2()4( R∈+−= βαβαβαSvp .
Alegem )4()0,1,1(2 Svpe ∈−= şi vrem să determinăm ),,2( 33333 βαβα +−=e
astfel încât 0, 32 =ee , adică 02 333 =+− αβα . Rezultă că 33 αβ = , de unde
),,( 3333 ααα=e şi astfel putem alege )1,1,1(3 =e . S-a obŃinut baza ortogonală
)1,1,1(,)0,1,1(− , din care se construieşte, prin normalizare, baza ortonormată
−=
3
1,
3
1,
3
1,0,
2
1,
2
12B .
Forma canonică a formei pătratice date este 23
22
21 442)( xxxxQ ++−= ,
aceasta fiind obŃinută în baza ortonormată
−
−−=
3
1,
3
1,
3
1,0,
2
1,
2
1,
6
2,
6
1,
6
1B .
ObservaŃie: Comparând rezultatele obŃinute în urma rezolvării exerciŃiilor 3
şi 4, reiese concluzia că atunci când se reduce o formă pătratică la forma canonică, prin două metode diferite, se pot obŃine rezultate diferite. În secŃiunea următoare, vom determina totuşi un invariant al formei canonice.

189
3. Signatura unei forme pătratice. Teorema inerŃiei
În această secŃiune, V va desemna un spaŃiu vectorial real de dimensiune n. DefiniŃia 3.1: Pentru o formă pătratică R→VQ : având forma canonică
∑=
=n
iii xaxQ
1
2)( ,
în care p coeficienŃi sunt strict pozitivi, q coeficienŃi sunt strict negativi, iar )( qpnr +−= sunt nuli, tripletul ),,( rqp se numeşte signatura formei pătratice.
Teorema 3.2 (Teorema inerŃiei): Signatura unei forme pătratice este un
invariant al formei canonice, adică signatura este aceeaşi în orice formă canonică a formei pătratice respective.
DemonstraŃie: Fie R→VQ : o formă pătratică şi ,...,, 211 neeeB = ,
,...,, 212 nfffB = două baze ale lui V în raport cu care Q are formele canonice:
∑=
=n
iii xaxQ
1
2)( , ∑=
=n
iii xbxQ
1
2~)(
cu signaturile ),,( 111 rqp şi respectiv ),,( 222 rqp .
Printr-o eventuală rearanjare a vectorilor din cele două baze se poate presupune că primii 1p (respectiv 2p ) coeficienŃi ai celor două forme canonice sunt
strict pozitivi, următorii 1q (respectiv 2q ) coeficienŃi sunt strict negativi, iar ultimii
1r (respectiv 2r ) coeficienŃi sunt nuli.
Presupunem prin absurd că 21 pp > . Vom nota cu ,...,,1211 peeeSpV =
subspaŃiul lui V generat de ,...,,121 peee şi cu ,...,, 212 22 npp eeeSpV ++=
subspaŃiul lui V generat de ,...,, 21 22 npp eee ++ . Rezultă că
npnpVdimVdim >−+=+ 2121 )()( . Aplicând acum Teorema lui Grassmann avem:
)()()()()( 21212121 VVdimnVVdimVdimVdimVVdimn ∩−>∩−+=+≥ ,
de unde rezultă că 021 VVV ≠∩ . Astfel, se poate considera un vector nenul
21* VVx ∩∈ .
Pe de-o parte, deoarece 1* Vx ∈ avem ppexexexx +++= ...2211
* , de unde
0)(1
2* ≥=∑=
p
iii xaxQ , (1)
iar pe de altă parte, cum 2Vx ∈ avem nnpppp fxfxfxx ~...~~2211
*2222
+++= ++++ , şi
astfel
0~)(1
2*
2
≤= ∑+=
n
piii xbxQ . (2)

190
Din relaŃiile (1) şi (2) obŃinem 0)( * =xQ , de unde vom găsi
0~...~~... 2121 22======== ++ nppp xxxxxx , ceea ce implică Vx 0* = -
contradicŃie. Deci presupunerea că 21 pp > este falsă. Similar se demonstrază că nu
putem avea nici inegalitatea 21 pp < şi astfel am obŃinut că 21 pp = .
Procedând analog, se arată că 21 qq = , ceea ce demonstrează că signatura este aceeaşi pentru ambele forme canonice.
Exemplu: În ExerciŃiul 4 s-a determinat pentru forma pătratică
RR →3:Q , 32312122
21 44233)( xxxxxxxxxQ ++−+= ,
forma canonică 23
22
21 442)( xxxxQ ++−= . Astfel, signatura acestei forme pătratice
va fi )0,1,2( . DefiniŃia 3.3: Spunem că forma pătratică R→VQ : este pozitiv (negativ)
definită dacă 0)( >xQ (resp. 0)( <xQ ) pentru orice 0\ VVx ∈ .
ObservaŃie: O formă pătratică Q este pozitiv (negativ) definită dacă şi numai
dacă polara ei F este pozitiv (resp. negativ) definită. Teorema 3.4 (Criteriul lui Sylvester): Fie R→VQ : o formă pătratică,
,...,, 21 neeeB = o bază a lui V, njiijaA,1,
)(=
= matricea asociată formei pătratice
Q în baza B şi n∆∆∆ ...,,, 21 minorii principali ai matricei A. Atunci:
1. Q este pozitiv definită dacă şi numai dacă 0>∆ i , pentru ni ,1= ;
2. Q este negativ definită dacă şi numai dacă 0)1( >∆− ii , pentru ni ,1= .
DemonstraŃie: 1. Presupunem că forma pătratică Q este pozitiv definită şi
notăm cu F polara lui Q. Vom arăta mai întâi că toŃi minorii principali ai matricei A sunt nenuli. Presupunem prin absurd că există ,...,2,1 nk ∈ astfel încât 0=∆k . În
acest caz o linie a determinantului k∆ este o combinaŃie liniară a celorlalte linii, deci
există R∈kααα ,...,, 21 , nu toŃi nuli, astfel încât
0...2211 =+++ ikkii aaa ααα ,
pentru ki ,1= . Din această relaŃie, succesiv obŃinem:
=== ∑∑∑
===
k
jijj
k
jijj
k
jjij eeFeeFa
111
,),(0 ααα ,
pentru ki ,1= . ÎnmulŃind relaŃiile de mai sus cu iα şi sumând aceste relaŃii după
ki ,1= , obŃinem:
0,11
=
∑∑==
k
iii
k
jjj eeF αα .

191
Cum F este pozitiv definită, rezultă 01
=∑=
k
iiieα , ceea ce arată că vectorii keee ,...,, 21
sunt liniar dependenŃi – contradicŃie. Deci 0≠∆ i , pentru ni ,1= .
Putem aplica acum Teorema 2.6 . Rezultă că există o bază ,...,, 21 neeeB =
în raport cu care forma pătratică Q are forma canonică
2123
3
222
2
121
1
...1
)( nn
n xxxxxQ∆
∆++
∆
∆+
∆
∆+
∆= − .
Deoarece Q este pozitiv definită, obŃinem 0,...,,,1 1
3
2
2
1
1
>∆
∆
∆
∆
∆
∆
∆−
n
n şi în consecinŃă
0...,,, 21 >∆∆∆ n .
Reciproc, dacă 0...,,, 21 >∆∆∆ n rezultă că 0,...,,,1 1
3
2
2
1
1
>∆
∆
∆
∆
∆
∆
∆−
n
n . Astfel,
0...1
)( 2123
3
222
2
121
1
>∆
∆++
∆
∆+
∆
∆+
∆= −
nn
n xxxxxQ ,
pentru orice 0\ VVx ∈ , unde nxxx ,...,, 21 sunt componentele vectorului x în baza
în care s-a obŃinut baza canonică a cărei existenŃă este asigurată de Teorema 2.6. Deci forma pătratică Q este pozitiv definită.
2. Forma pătratică Q este negativ definită dacă şi numai dacă forma pătratică R→VQ :' , )()(' xQxQ −= este pozitiv definită. Matricea asociată lui 'Q este
AA −=' , iar minorii ei principali sunt ii
i ∆−=∆ )1(' , ni ,1= .
De la punctul 1. al teoremei avem 'Q pozitiv definită dacă şi numai dacă
0' >∆ i . Aşadar Q este negativ definită dacă şi numai dacă 0)1( >∆− ii .
Fie R→VQ : o formă pătratică având scrierea
∑≤≤
=nji
jiij xxaxQ,1
)( (3)
într-o anumită bază B a lui V. Dacă notăm cu njiijaA
,1,)(
== matricea asociată formei
pătratice Q în baza B, atunci egalitatea (3) este echivalentă cu relaŃia matricială tXAXxQ =)( (4)
(în membrul drept al acestei egalităŃi X este matricea linie ),...,,( 21 nxxx ).
Reamintim că o matrice )(RnA M∈ se numeşte pozitiv definită dacă
0>txAx , pentru orice vector nenul nx R∈ . Din relaŃia (4) se obŃine imediat următorul rezultat:
PropoziŃia 3.5: Forma pătratică R→VQ : este pozitiv definită dacă şi
numai dacă matricea ei asociată A este pozitiv definită. Deoarece între mulŃimea formelor pătratice R→VQ : şi mulŃimea matricelor
simetrice )(RnA M∈ este o corespondenŃă bijectivă, cu ajutorul PropoziŃiei 3.5
putem reformula primul punct al Criteriului lui Sylvester astfel:

192
Teorema 3.6: O matrice simetrică este pozitiv definită dacă şi numai dacă toŃi minorii principali ai matricei sunt strict pozitivi.
4. ExerciŃii
1. Care dintre următoarele aplicaŃii:
a) RRR →× 22:F , 1221),( yxyxyxF −= , unde ),( 21 xxx = , ),( 21 yyy = ;
b) RRR →× 22:F , 222
11 )(),( yxyxyxF −−= , unde ),( 21 xxx = ,
),( 21 yyy = ;
c) RRR →× 33:F , 332211 32),( yxyxyxyxF −+= , unde ),,( 321 xxxx = ,
),,( 321 yyyy = ,
sunt forme biliniare? 2. Fie )(RnA M∈ o matrice fixată. Să se demonstreze că aplicaŃia
RRR →× )()(: nnF MM , tXAYYXF =),( este o formă biliniară.
3*. Fie R→×VVF : o formă biliniară pozitiv definită. Atunci are loc
inegalitatea:
),(),(),( 2 yyFxxFyxF ≤ , pentru orice Vyx ∈, , cu egalitate dacă şi numai dacă vectorii x şi y sunt liniar independenŃi. (IndicaŃie: se poate folosi Teorema 1.6, Capitolul IV.)
4. Se consideră aplicaŃia RRR →× 33:F ,
3313221221 23),( yxyxyxyxyxyxF +−++= ,
unde ),,( 321 xxxx = , ),,( 321 yyyy = .
i) ArătaŃi că F este formă biliniară;
ii) ScrieŃi matricea asociată lui F în baza canonică a lui 3R ; iii) DeterminaŃi matricea asociată lui F în baza )0,1,1(,)0,0,1(,)1,1,0(1 =B . 5. Să se determine formele pătratice induse de următoarele forme biliniare
simetrice:
a) RRR →× 33:F , −++++= 1221332211 22),( yxyxyxyxyxyxF
2332 44 yxyx −
b) RRR →× )()(: nnF MM , )()( ABTrABF = .
6. Utilizând metoda lui Gauss, să se reducă la forma canonică următoarele
forme pătratice:
a) 312123
22
21321 42179),,( xxxxxxxxxxQ +−++= ;

193
b) 32312123
22
21321 8444),,( xxxxxxxxxxxxQ +−−++= ;
c) 4342324131214321 ),,,( xxxxxxxxxxxxxxxxQ +++++= ;
d) 433241312124
22
214321 4232),,,( xxxxxxxxxxxxxxxxxQ ++−++−+= .
7. ReduceŃi următoarele forme pătratice la forma canonică, utilizând metoda
lui Jacobi:
a) 32312123
22
21321 44168),,( xxxxxxxxxxxxQ +++++= ;
b) 322123
22
21321 44322),,( xxxxxxxxxxQ −−++= ;
c) +−+−−+−= 41312124
23
22
214321 2222),,,( xxxxxxxxxxxxxxQ
4232 42 xxxx − ;
d) +++++++= 32413124
23
22
214321 22444),,,( xxxxxxxxxxxxxxQ
4342 62 xxxx + .
8. Cu ajutorul metodei transformărilor ortogonale, să se reducă la forma
canonică următoarele forme pătratice:
a) 322123
22
21321 4432),,( xxxxxxxxxxQ −−++= ;
b) 32312123
22
21321 222),,( xxxxxxxxxxxxQ −−−++= ;
c) 322123
22
21321 88753),,( xxxxxxxxxxQ +−−−= .
9. Se consideră forma pătratică
312123
22
21321 44465),,( xxxxxxxxxxQ −−++= .
Utilizând metoda lui Gauss, metoda lui Jacobi şi respectiv metoda transformărilor ortogonale, să se reducă forma pătratică la forma canonică. VerificaŃi Teorema inerŃiei.

195
Bibliografie
[1] M. Abramowitz, I.A. Stegun – Handbook of mathematical functions, Dover Publications, 1972 [2] Gh. Atanasiu, Gh. Munteanu, M. Postolache – Algebră liniară, geometrie analitică şi diferenŃială, ecuaŃii diferenŃiale, Editura All, 1994 [3] V. Bălan – Algebră liniară, geometrie analitică, Editura Fair Partners, 1999 [4] V. Brînzănescu, O. Stănăşilă – Matematici speciale, Editura All, 1998 [5] T.S. Chihara – An introduction to orthogonal polynomials, Gordon & Breach, 1978 [6] C. Costinescu – Algebră liniară şi aplicaŃii în geometrie, Editura Matrix Rom, 2005 [7] V. Éfimov – Éléments de géométrie analitique, Édition MIR, Moscou, 1969 [8] D. Faddéev, I. Sominski – Recueil d’exercices d’algèbre supérieure, Édition MIR, Moscou, 1972 [9] G. Groza – Analiză numerică, Editura Matrix Rom, 2005 [10] G. Golub, C. Van Loan – Calcul matricial, Editua Theta, 2005 [11] R. Horn, C. Johnson – Analiza matricială, Editua Theta, 2001 [12] D. Lay – Linear algebra and its applications, Addison-Wesley Publishing, 2003 [13] A.F. Nikiforov, S.K. Suslov, V.B. Uvarov – Classical orthogonal polynomials of a discrete variable, Springer-Verlag, 1992 [14] M. Pavel – Algebră liniară, geometrie analitică şi diferenŃială, Vol. 1, Editura Agir, Bucureşti, 2002
196
[15] G. Păltineanu, Ş. Donescu – Algebră liniară, Editura Matrix Rom, 2007 [16] G. Păltineanu, M. Pavel, R. Trandafir – Bazele analizei numerice, Editura Printech, 2001 [17] A. Popescu – Algebră liniară şi aplicaŃii, Editura UniversităŃii Bucureşti, 1999 [18] Gh.D. Simionescu – NoŃiuni de algebră vectorială şi aplicaŃii în geometrie, Editura Tehnică, 1983 [19] D. Smaranda, N. Soare – Transformări geometrice, Editura Academiei Române, 1988 [20] G. Strang – Linear algebra and its applications, Thomson Learning, 1988 [21] C. Udrişte – Probleme de algebra liniară, geometrie analitică şi diferenŃială,
Editura Didactică şi pedagogică, 1976 [22] M. Voicu, G. Groza, V. Marinescu – Algebră liniară, geometrie analitică şi diferenŃială, Editura ICB, 1988
[23] V. Voievodine – Principes numeriques d’algèbre linéaire, Édition MIR, Moscou, 1977
197
Index
automorfism 99 axa unui fascicol de plane 37 bază a unui spaŃiu vectorial 55 bază ortogonală 77 bază ortonormată 77 combinaŃie liniară 52 complement ortogonal 80 componentele unui vector liber 13 coordonatele unui vector într-o bază 56 criteriul general de diagonalizare 152 criteriul lui Sylvester 190 defectul unei transformări liniare 98 dimensiunea unui spaŃiu vectorial 58 discuri Gerschgorin 146 ecuaŃia generală a planului 30 ecuaŃia caracteristică 141 ecuaŃiile canonice ale dreptei 35 ecuaŃiile parametrice ale dreptei 34 endomorfism 92 expresia analitică a produsului
mixt 24 expresia analitică a produsului scalar 17 expresia analitică a produsului vectorial 22 expresia analitică a unui vector liber 13 factorizare Cholesky 123 factorizare LU 114 fascicol de plane 37 forma canonică a unei forme pătratice 180 forma diagonală a unei matrice 150 forma triunghiulară a unui sistem 111 formă biliniară 176 formă biliniară pozitiv (negativ) definită 176 formă biliniară simetrică 176 formă pătratică 179 formă pătratică pozitiv (negativ) definită 190 funcŃie pondere 82 imaginea unei transformări liniare 96 interval de ortogonalitate 82 izomorfism de spaŃii vectoriale 99 înmulŃirea unui vector liber cu un scalar 6
198
matrice asemenea 150 matrice diagonal dominantă 131 matrice diagonală 149 matrice diagonalizabilă 150 matrice inferior (superior) triunghiulară 114 matrice ortogonală 160 matrice pozitiv definită 123 matrice simetrică 164 matricea asociată unei forme biliniare 177 matricea asociată unei forme pătratice 180 matricea asociată unei transformări liniare 102 matricea de trecere de la o bază la alta 65 matricea rotaŃiei 169 metoda iterativă Gauss-Seidel 133 metoda iterativă Jacobi 130 metoda lui Gauss pentru forme pătratice 181 metoda lui Jacobi pentru forme pătratice 184 metoda puterii 157 metoda transformărilor ortogonale 186 metrică 76 minori principali 117 normă euclidiană 73 normă matricială 127 normă pe un spaŃiu vectorial 73 nucleul unei transformări liniare 96 parametri directori ai unei drepte 33 polara formei pătratice 179 polinoame Cebâşev de speŃa a doua 89 polinoame Cebâşev de speŃa întâi 88 polinoame Hermite 89 polinoame Laguerre 89 polinoame Legendre 87 polinom caracteristic 141 procedeul Gram-Schmidt 79
produs scalar pe un spaŃiu vectorial 70 produsul mixt a trei vectori liberi 24 produsul scalar a doi vectori liberi 14 produsul vectorial a doi vectori liberi 19 proiecŃie ortogonală 81 rangul unei transformări liniare 98 regula paralelogramului 4 regula triunghiului 4 rotaŃie 167 scalar 50 signatura unei forme pătratice 189 simetrie 171 sistem de generatori 54 sisteme echivalente 111 spaŃii vectoriale izomorfe 99 spaŃiu euclidian 70 spaŃiu metric 76 spaŃiu normat 73 spaŃiu vectorial 50 spaŃiu vectorial finit generat 55 standardizare 82 subspaŃii complementare 63 subspaŃiu vectorial 60 subspaŃiu vectorial generat de o mulŃime 62 suma directă a două subspaŃii vectoriale 62 suma a doi vectori liberi 4 suma a două subspaŃii vectoriale 61 şir de polinoame ortogonale 82 teorema Cauchy-Buniakowski -Schwarz 72 teorema Hamilton-Cayley 144 teorema inerŃiei 189 teorema lui Gerschgorin 146, 147 teorema lui Grassmann 64 teorema rang-defect 98 transformare liniară 92

199
transformări elementare pentru un sistem 110 unghiul dintre doi vectori liberi 14 unghiul dintre două drepte 41 unghiul dintre două plane 40 unghiul dintre o dreaptă şi un plan 42 valoare proprie 138 valoare proprie dominantă 155 vector director al unei drepte 33 vector legat 1 vector liber 3 vector propriu 138 vector propriu dominant 155 vectori echipolenti 3 vectori liniar (in)dependenŃi 52 vectori ortogonali 77 versor 3