actionari electrice cu turatia variabila - memm.utcluj.ro · consumul de energie electrica in...
TRANSCRIPT
Actionari electrice cu turatiavariabila
Consumuri energetice
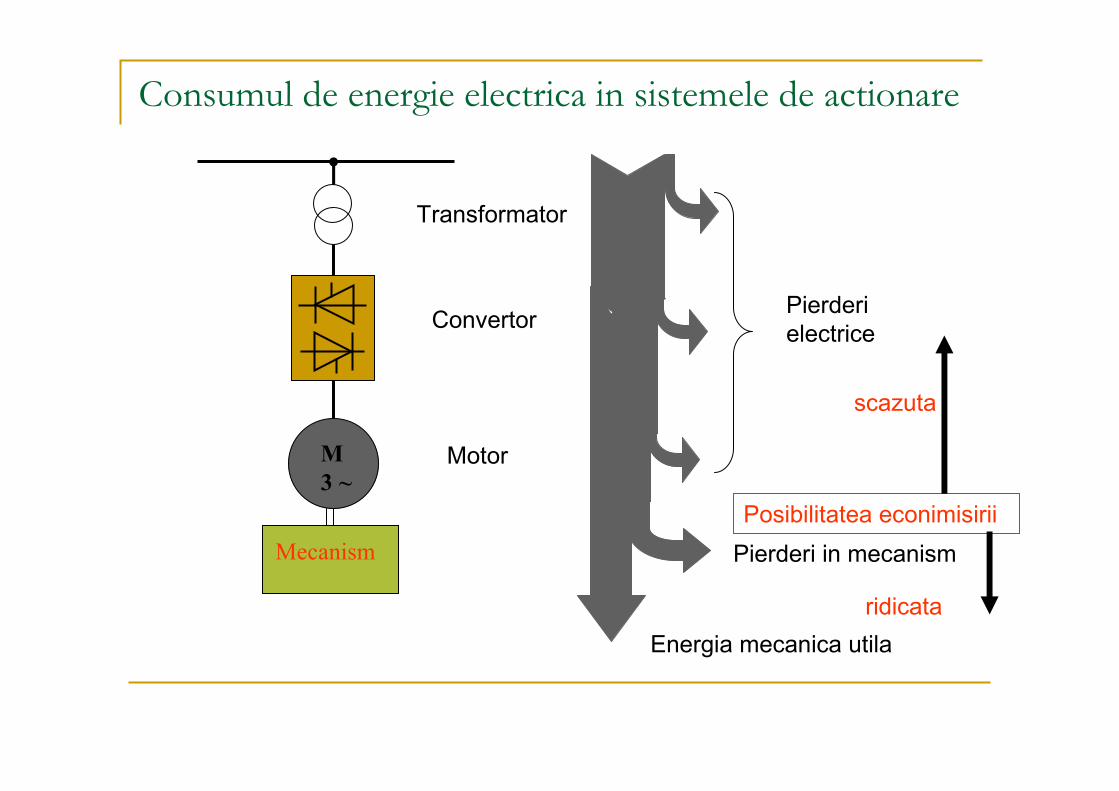
Consumul de energie electrica in sistemele de actionare
M3 ~
Mecanism
Transformator
Convertor
Motor
Pierderielectrice
Posibilitatea econimisiriiPierderi in mecanism
Energia mecanica utila
scazuta
ridicata
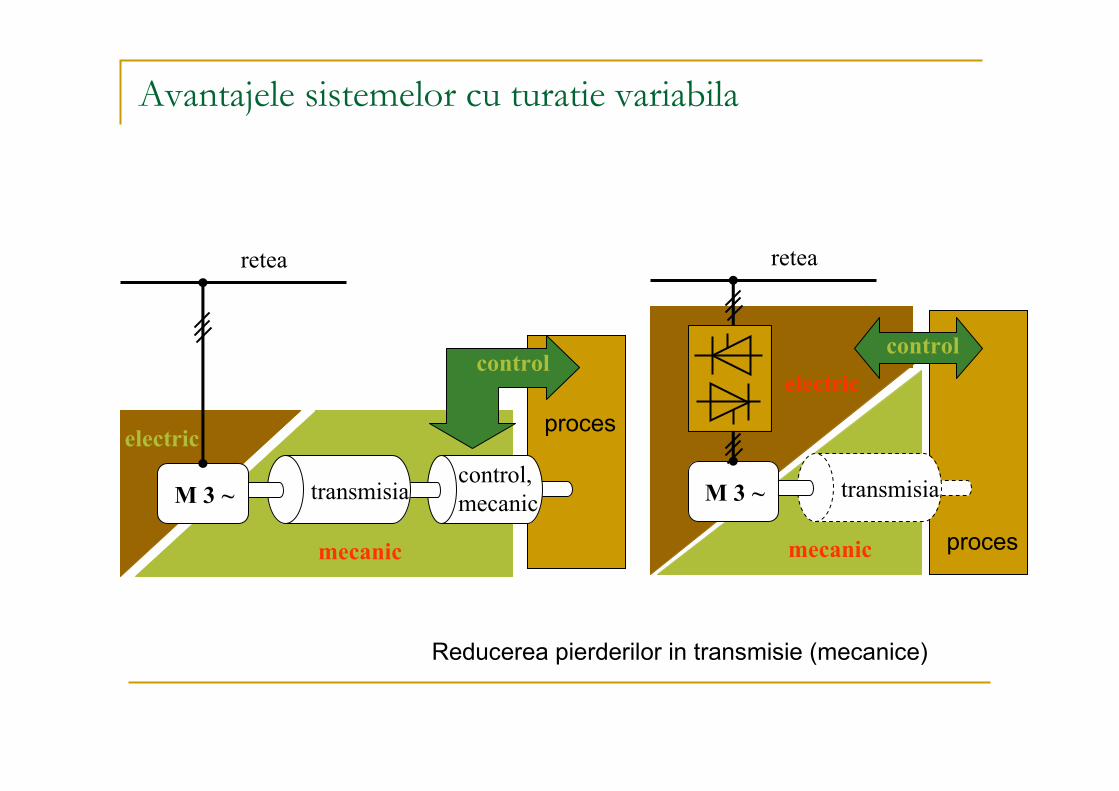
Avantajele sistemelor cu turatie variabila
Reducerea pierderilor in transmisie (mecanice)
M 3 ~ transmisiacontrol,mecanic
retea
control
electric
mecanic
proces
M 3 ~ transmisia
retea
electric
mecanic proces
control
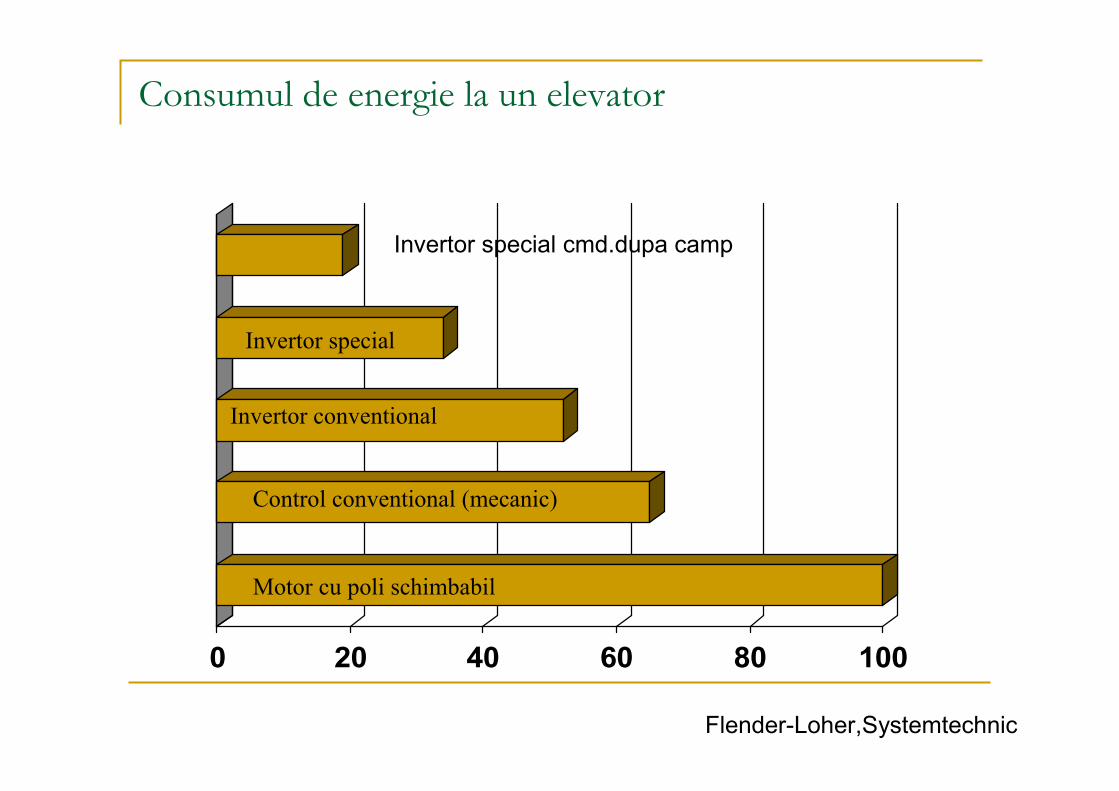
Consumul de energie la un elevator
Flender-Loher,Systemtechnic
0 20 40 60 80 100
Motor cu poli schimbabil
Control conventional (mecanic)
Invertor conventional
Invertor special
Invertor special cmd.dupa camp
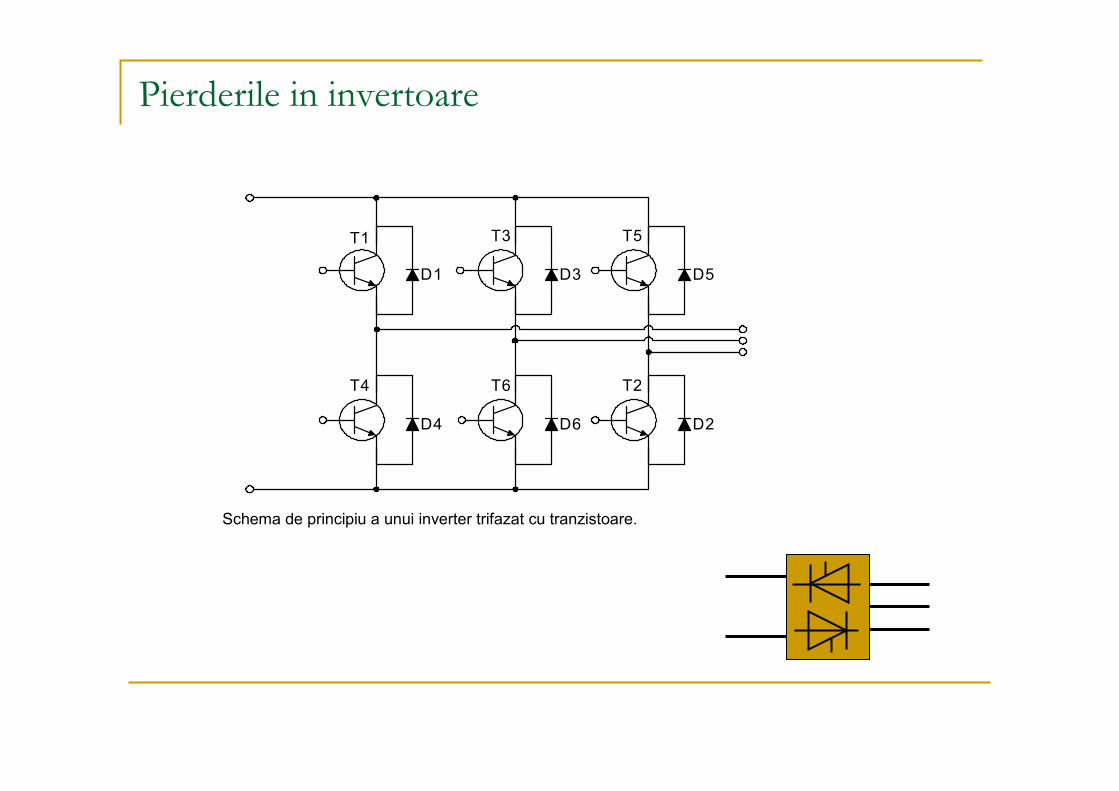
Pierderile in invertoare
D1
T1
D4
T4
D3
T3
D6
T6
D5
T5
D2
T2
Schema de principiu a unui inverter trifazat cu tranzistoare.
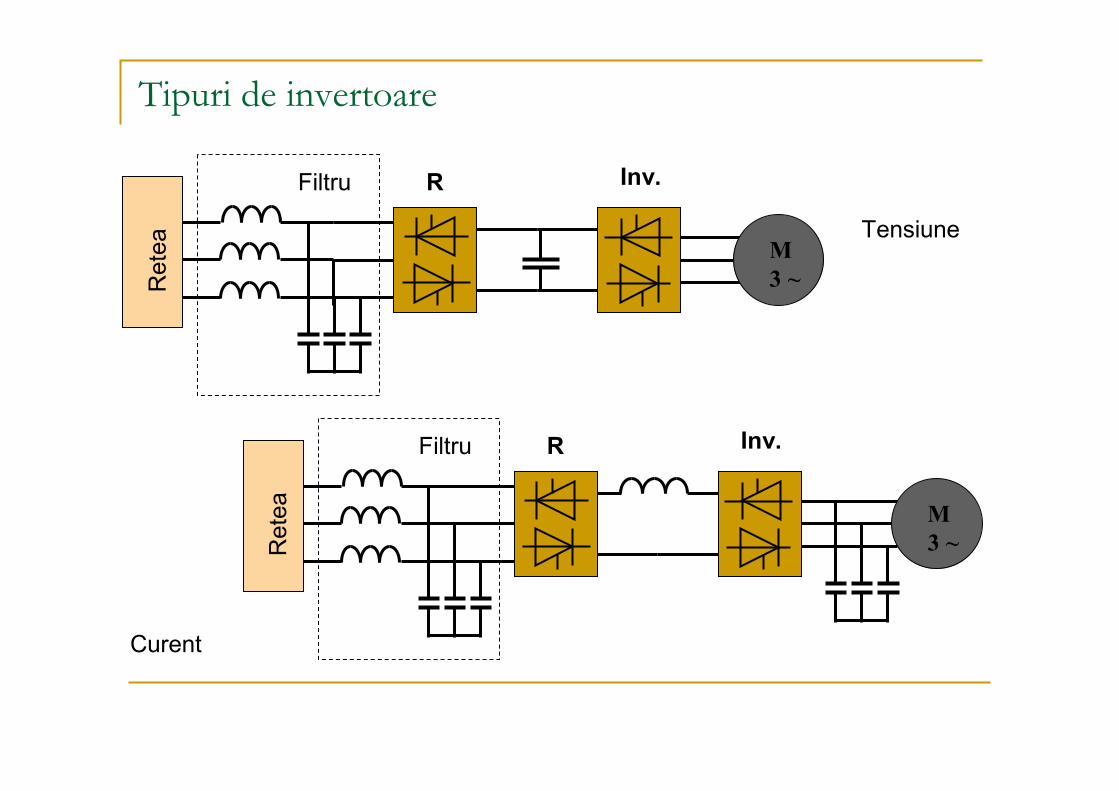
Tipuri de invertoare
RFiltruR
etea M
3 ~
Inv.
RFiltru
Ret
ea M3 ~
Inv.
Tensiune
Curent
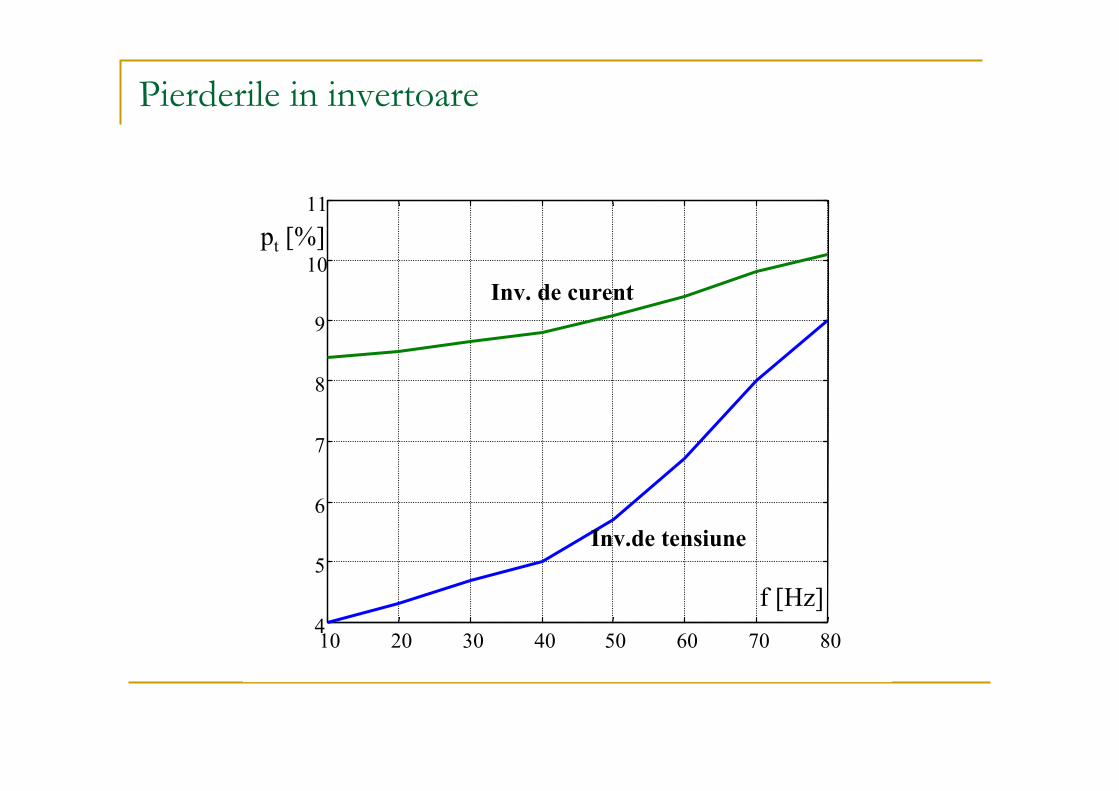
Pierderile in invertoare
10 20 30 40 50 60 70 804
5
6
7
8
9
10
11
f [Hz]
pt [%]
Inv. de curent
Inv.de tensiune
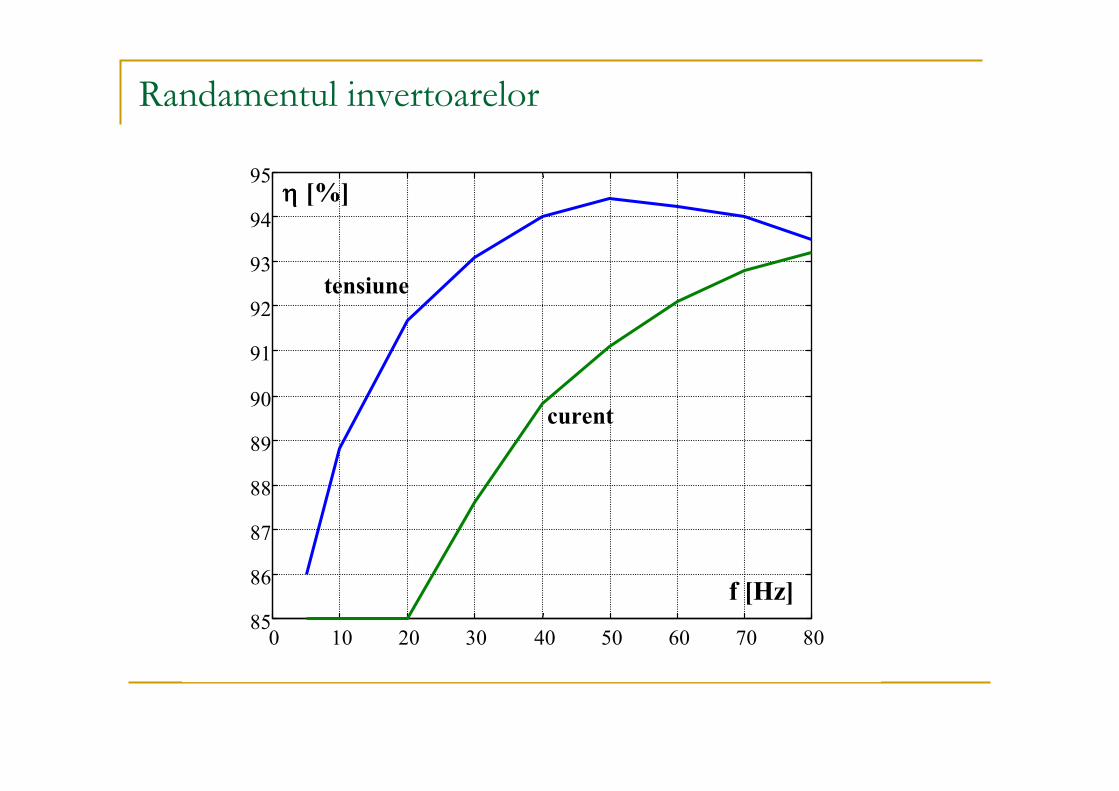
Randamentul invertoarelor
0 10 20 30 40 50 60 70 8085
86
87
88
89
90
91
92
93
94
95ηηηη [%]
curent
tensiune
f [Hz]
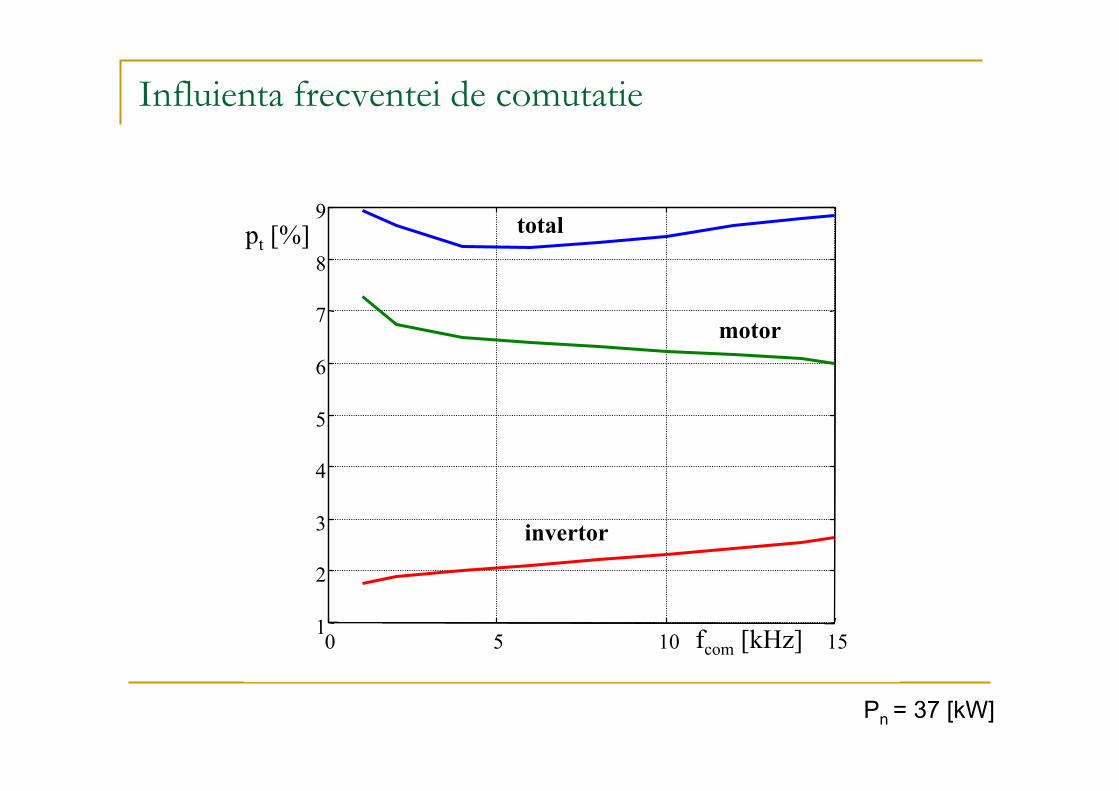
Influienta frecventei de comutatie
Pn = 37 [kW]
0 5 10 151
2
3
4
5
6
7
8
9
invertor
motor
totalpt [%]
fcom [kHz]
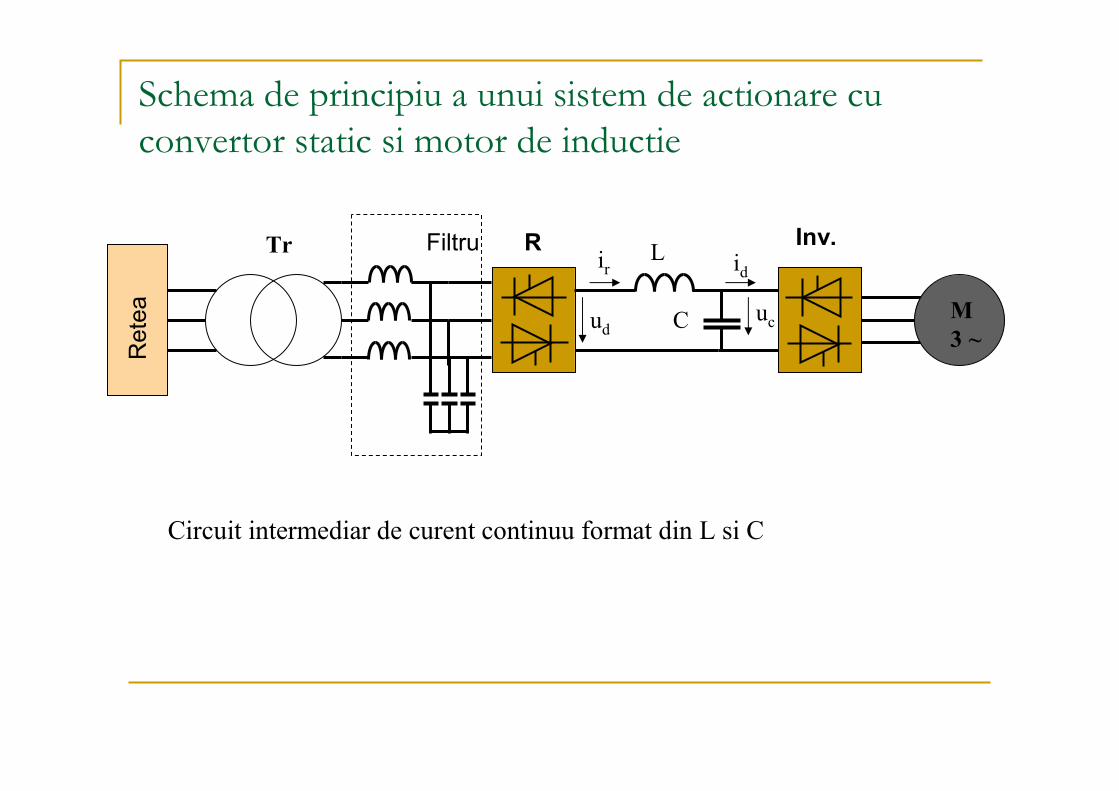
Schema de principiu a unui sistem de actionare cuconvertor static si motor de inductie
RFiltru
Ret
ea M3 ~
Inv.ir
uduc
L
C
idTr
Circuit intermediar de curent continuu format din L si C
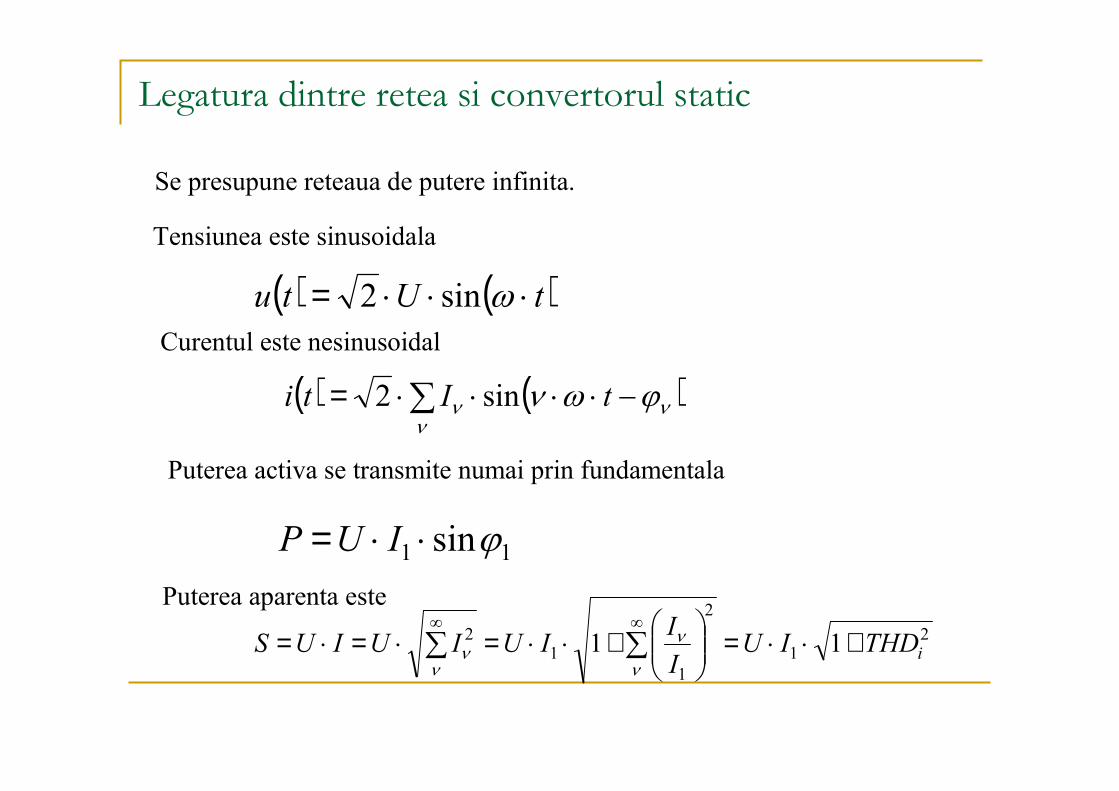
Legatura dintre retea si convertorul static
( ) ( )tUtu ⋅⋅⋅= ωsin2
( ) ( )∑ −⋅⋅⋅⋅=ν
νν ϕων tIti sin2
11 sinϕ⋅⋅= IUP
Se presupune reteaua de putere infinita.
Tensiunea este sinusoidala
Curentul este nesinusoidal
Puterea activa se transmite numai prin fundamentala
Puterea aparenta este2
1
2
11
2 11 iTHDIUIIIUIUIUS +⋅⋅=
+⋅⋅=⋅=⋅= ∑∑
∞∞
ν
ν
νν
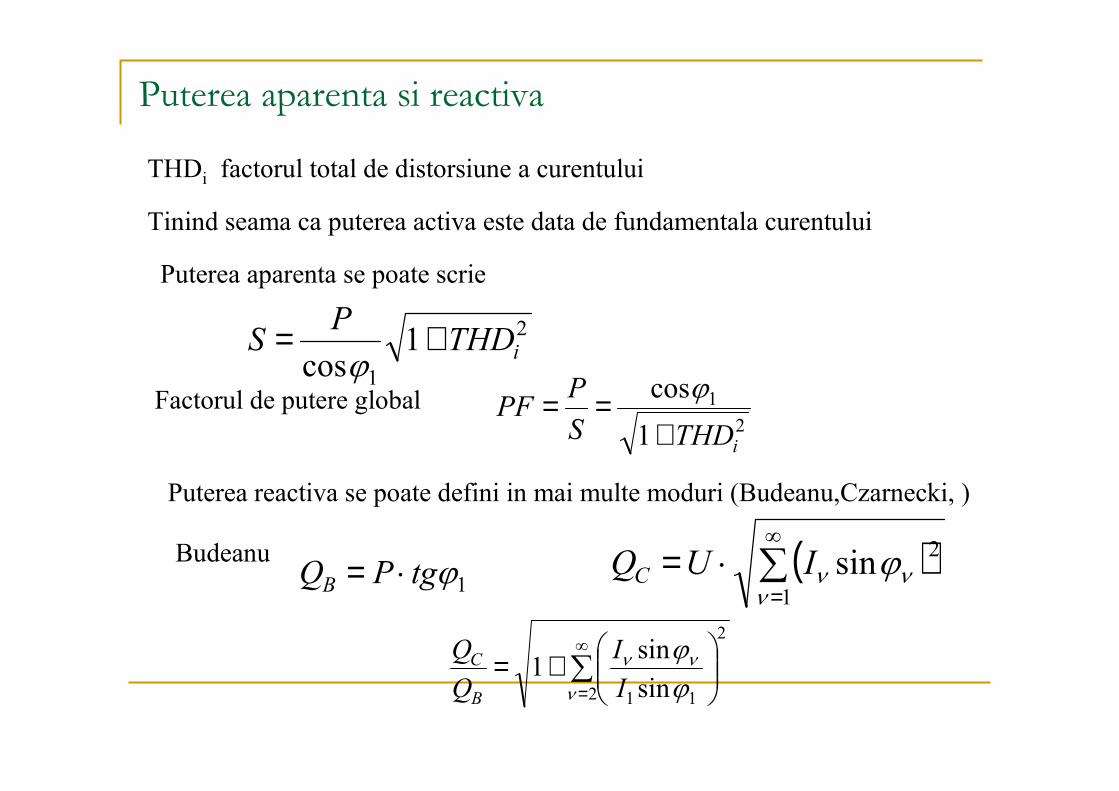
Puterea aparenta si reactiva
2
11
cos iTHDPS +=ϕ
21
1cos
iTHDSPPF
+== ϕ
1ϕtgPQB ⋅=
Tinind seama ca puterea activa este data de fundamentala curentului
THDi factorul total de distorsiune a curentului
Puterea aparenta se poate scrie
Factorul de putere global
Puterea reactiva se poate defini in mai multe moduri (Budeanu,Czarnecki, )
Budeanu ( )∑∞
=⋅=
1
2sinν
νν ϕIUQC
∑∞
=
+=
2
2
11 sinsin1
ν
νν
ϕϕ
II
QQB
C
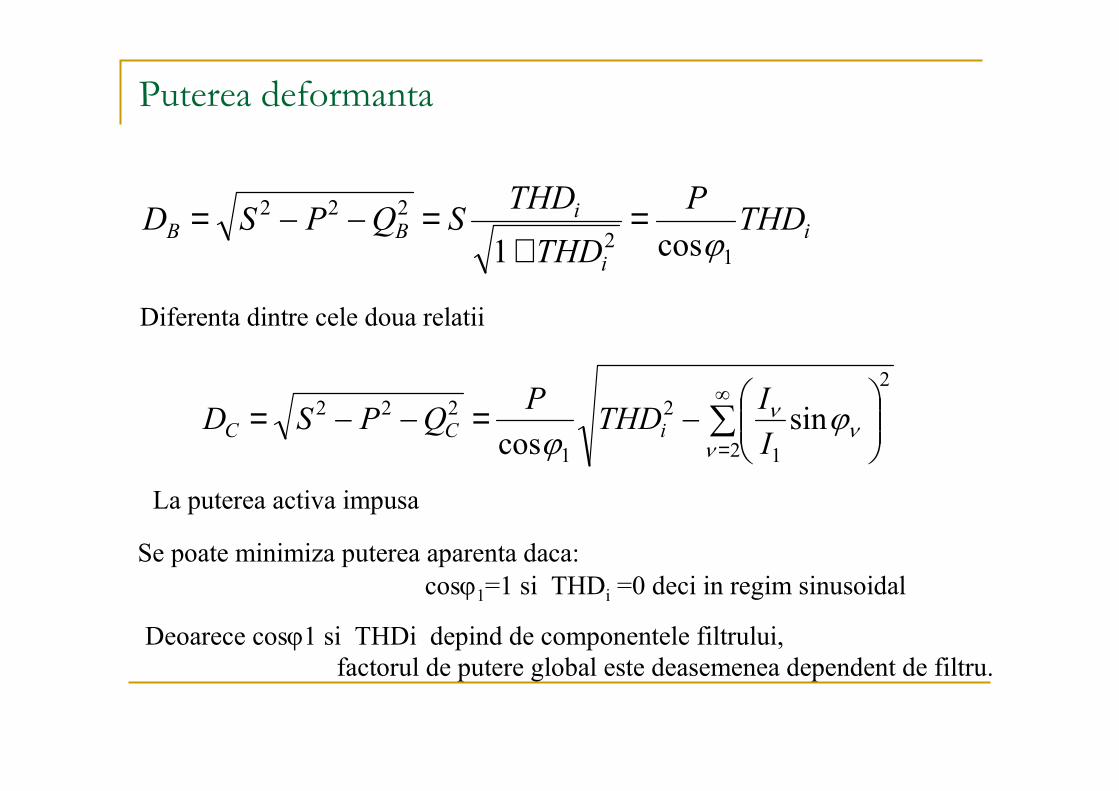
Puterea deformanta
ii
iBB THDP
THDTHDSQPSD
12
222
cos1 ϕ=
+=−−=
∑∞
=
−=−−=
2
2
1
2
1
222 sincos ν
νν ϕ
ϕ IITHDPQPSD iCC
Diferenta dintre cele doua relatii
La puterea activa impusa
Se poate minimiza puterea aparenta daca:cosϕ1=1 si THDi =0 deci in regim sinusoidal
Deoarece cosϕ1 si THDi depind de componentele filtrului,factorul de putere global este deasemenea dependent de filtru.
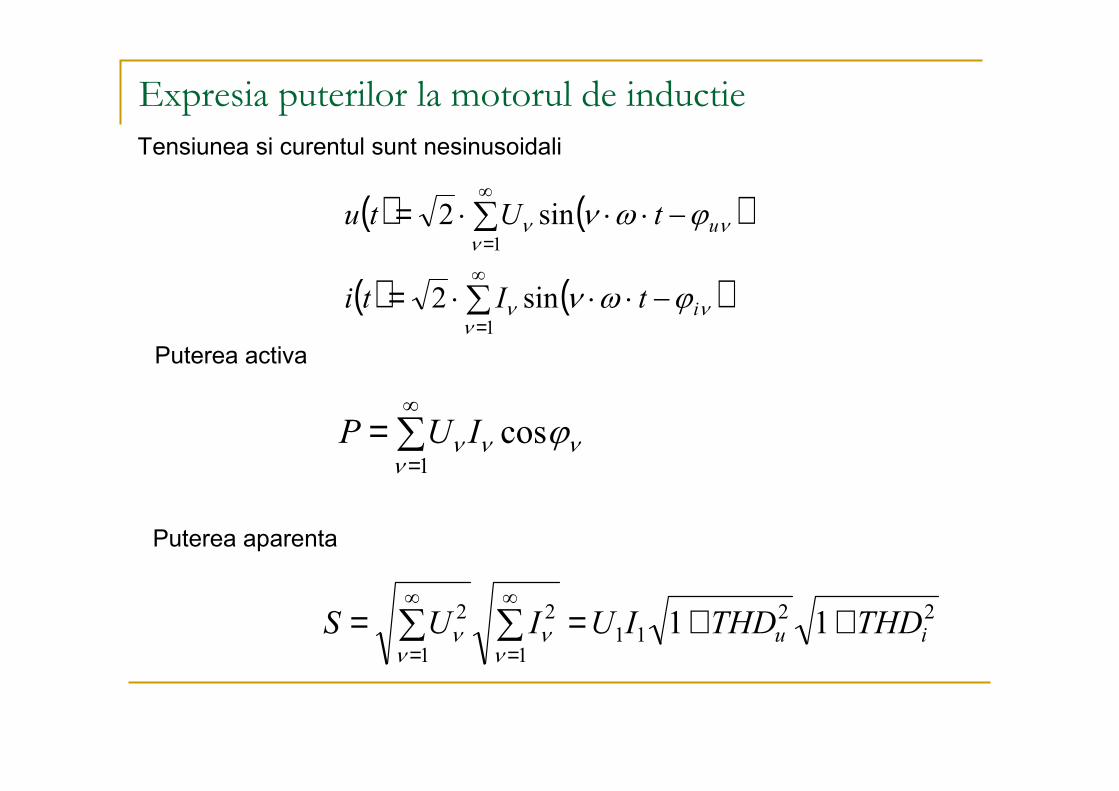
Expresia puterilor la motorul de inductie
( ) ( )
( ) ( )∑
∑
∞
=
∞
=
−⋅⋅⋅=
−⋅⋅⋅=
1
1
sin2
sin2
ννν
ννν
ϕων
ϕων
i
u
tIti
tUtu
∑∞
==
1cos
νννν ϕIUP
Tensiunea si curentul sunt nesinusoidali
Puterea activa
Puterea aparenta
2211
1
2
1
2 11 iu THDTHDIUIUS ++== ∑∑∞
=
∞
= νν
νν
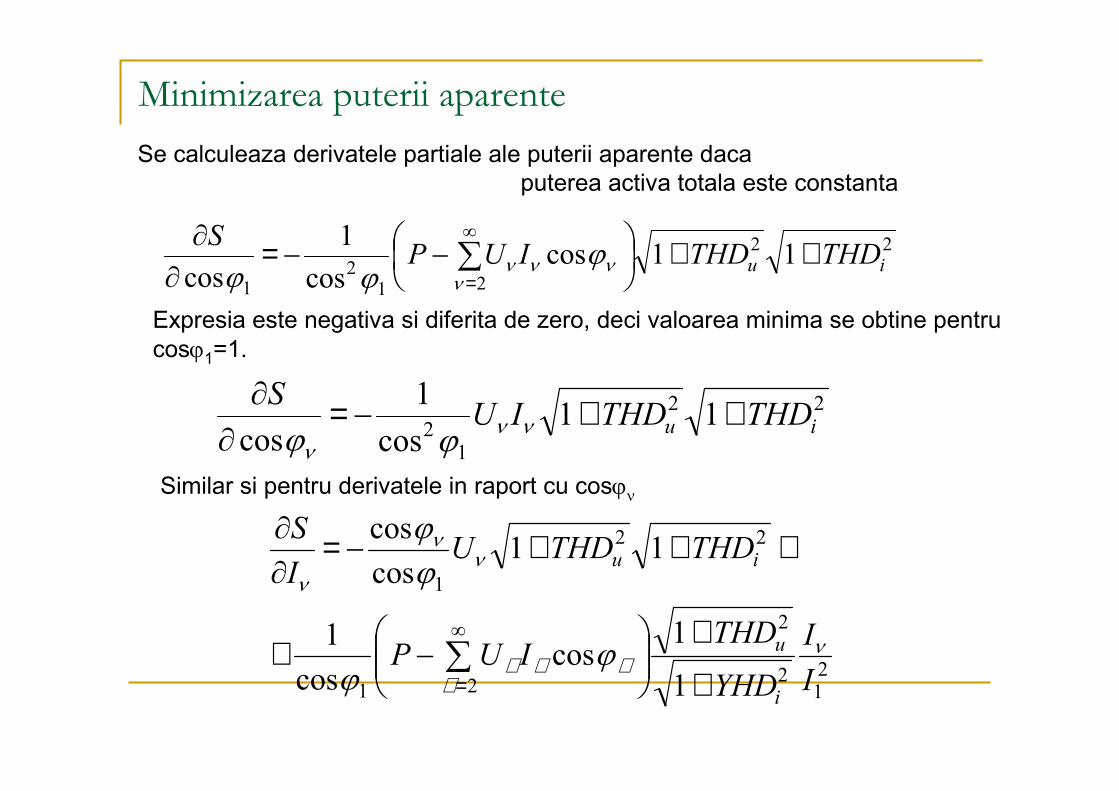
Minimizarea puterii aparente
22
212
111cos
cos1
cos iu THDTHDIUPS ++
−−=
∂∂
∑∞
=νννν ϕ
ϕϕ
22
12 11
cos1
cos iu THDTHDIUS ++−=∂
∂νν
ν ϕϕ
Se calculeaza derivatele partiale ale puterii aparente dacaputerea activa totala este constanta
21
2
2
21
22
1
1
1cos
cos1
11coscos
II
YHD
THDIUP
THDTHDUIS
i
u
iu
ν
µµµµ
νν
ν
ϕϕ
ϕϕ
+
+
−+
+++−=∂∂
∑∞
=
Expresia este negativa si diferita de zero, deci valoarea minima se obtine pentrucosϕ1=1.
Similar si pentru derivatele in raport cu cosϕν
Minimizarea puterii aparente
( ) 212
2 coscos1IIIUPTHDU iν
µµµµνν ϕϕ
−=+ ∑
∞
=
νµϕϕ
µ
µµ
ν
νν ≠=I
UI
U coscos
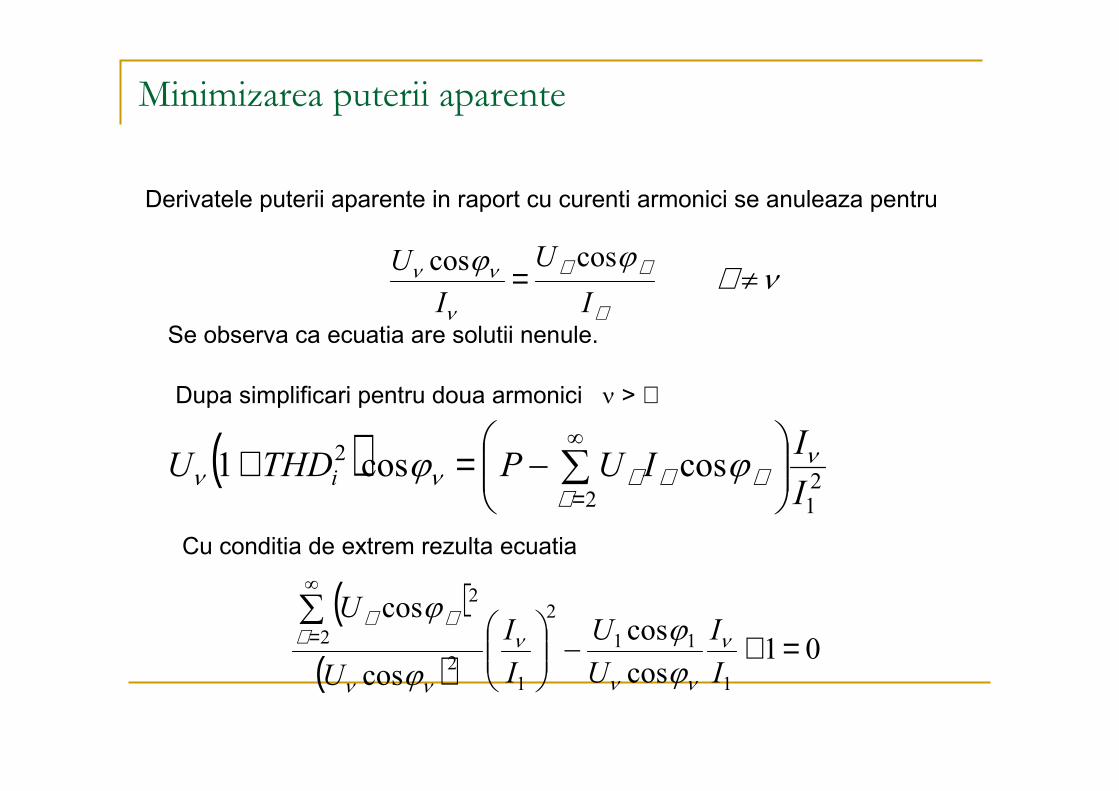
Derivatele puterii aparente in raport cu curenti armonici se anuleaza pentru
Se observa ca ecuatia are solutii nenule.
Dupa simplificari pentru doua armonici ν > µ
Cu conditia de extrem rezulta ecuatia
( )( )
01coscos
cos
cos
1
112
12
2
2
=+−
∑∞
=
II
UU
II
U
Uν
νν
ν
νν
µµµ
ϕϕ
ϕ
ϕ
Minimizarea puterii aparente
( )( ) ( )
−±= ∑
∑
∞
=∞
=
2
221111
2
21cos4coscos
cos2
cosµ
µµ
µµµ
ννν ϕϕϕϕ
ϕ UUUU
UII
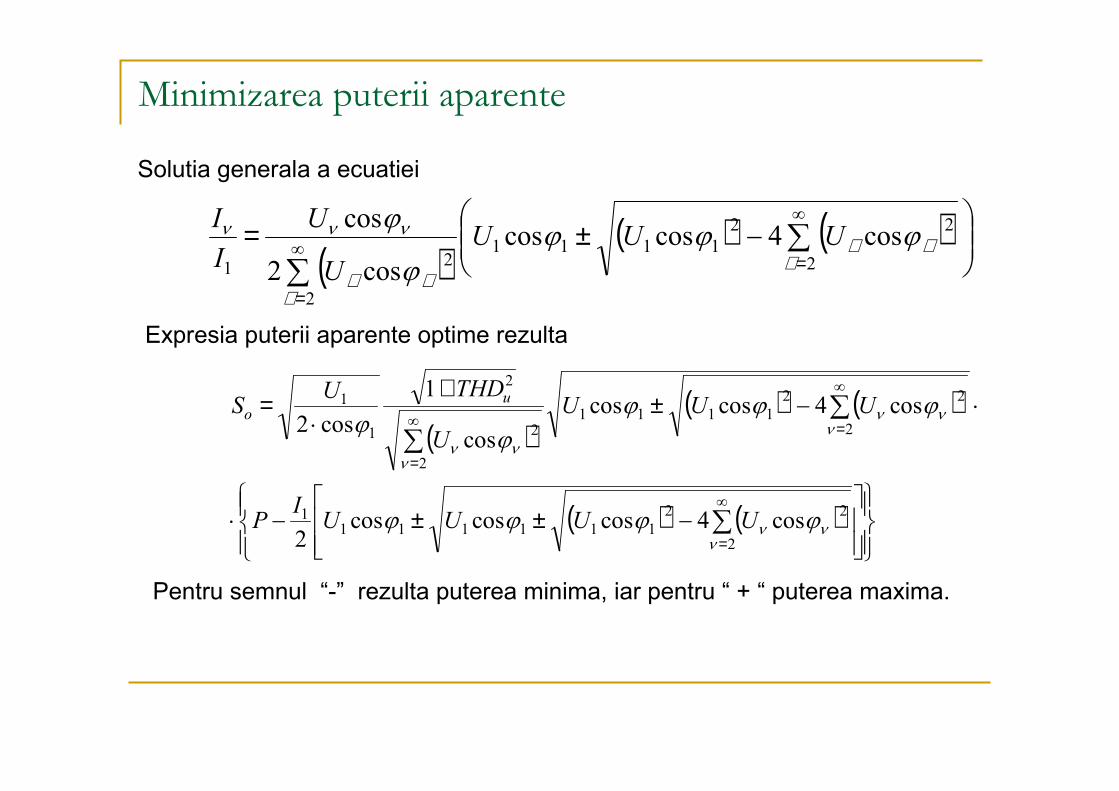
Solutia generala a ecuatiei
Expresia puterii aparente optime rezulta
( )( ) ( )
( ) ( )
−±±−⋅
⋅−±+
⋅=
∑
∑∑
∞
=
∞
=∞
=
2
22111111
1
2
221111
2
2
2
1
1
cos4coscoscos2
cos4coscoscos
1cos2
ννν
ννν
ννν
ϕϕϕϕ
ϕϕϕϕϕ
UUUUIP
UUUU
THDUS uo
Pentru semnul “-” rezulta puterea minima, iar pentru “ + “ puterea maxima.
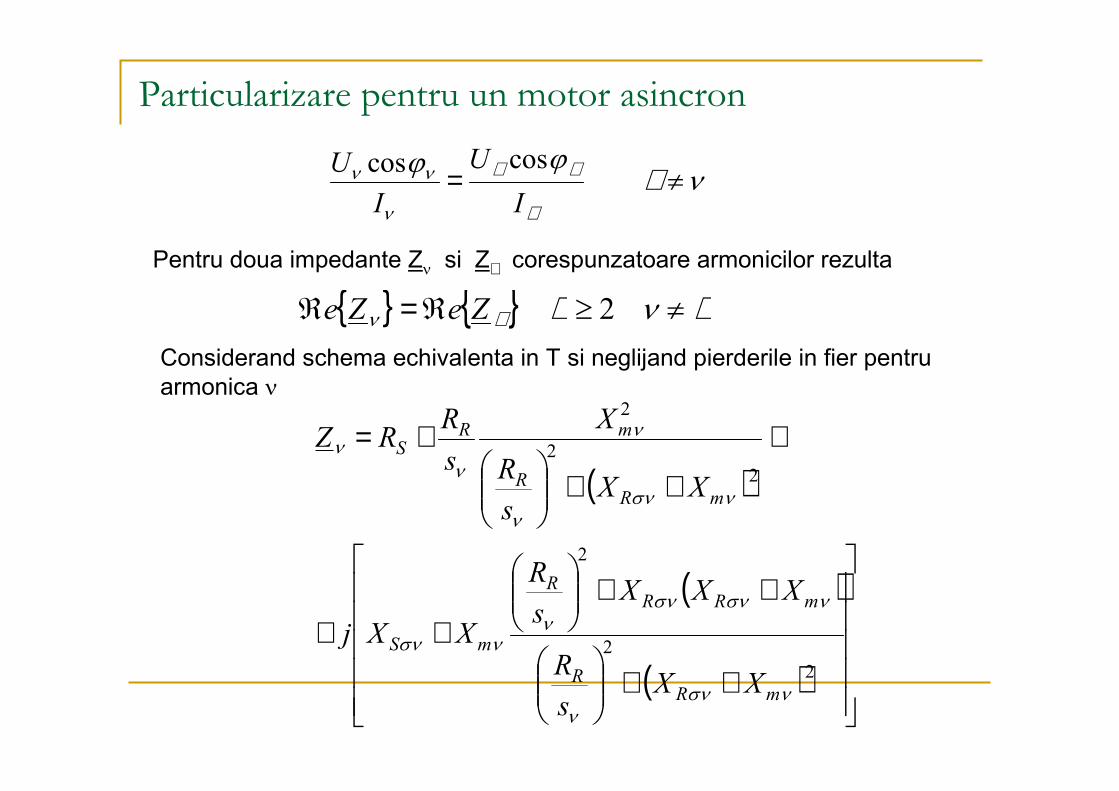
Particularizare pentru un motor asincron
νµϕϕ
µ
µµ
ν
νν ≠=I
UI
U coscos
{ } { } µνµµν ≠≥ℜ=ℜ 2ZeZePentru doua impedante Zν si Zµ corespunzatoare armonicilor rezulta
Considerand schema echivalenta in T si neglijand pierderile in fier pentruarmonica ν
( )
( )
( )
++
++
++
+
++
+=
22
2
22
2
νσνν
νσνσνν
νσν
νσνν
ν
νν
mRR
mRRR
mS
mRR
mRS
XXsR
XXXsR
XXj
XXsR
XsRRZ
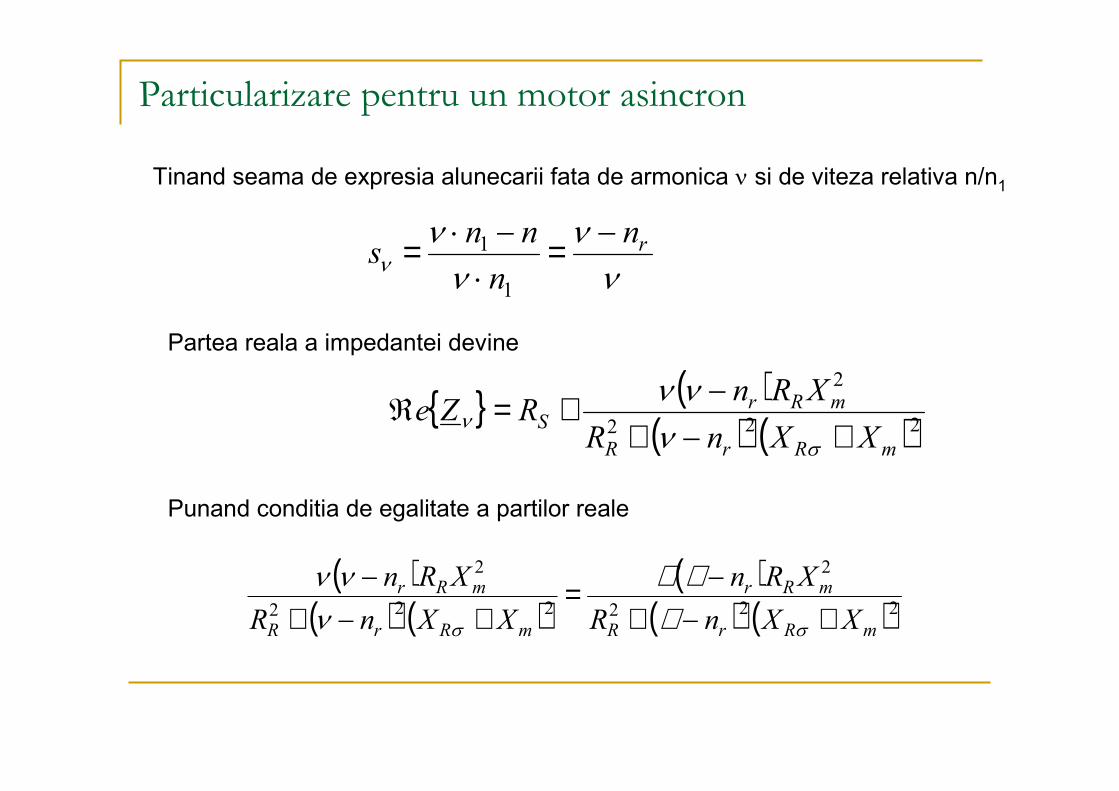
Particularizare pentru un motor asincron
νν
νν
νrn
nnns −=
⋅−⋅=1
1
{ } ( )( ) ( )222
2
mRrR
mRrS XXnR
XRnRZe+−+
−+=ℜσ
ν ννν
Tinand seama de expresia alunecarii fata de armonica ν si de viteza relativa n/n1
Partea reala a impedantei devine
Punand conditia de egalitate a partilor reale
( )( ) ( )
( )( ) ( )222
2
222
2
mRrR
mRr
mRrR
mRr
XXnRXRn
XXnRXRn
+−+−=
+−+−
σσ µµµ
ννν
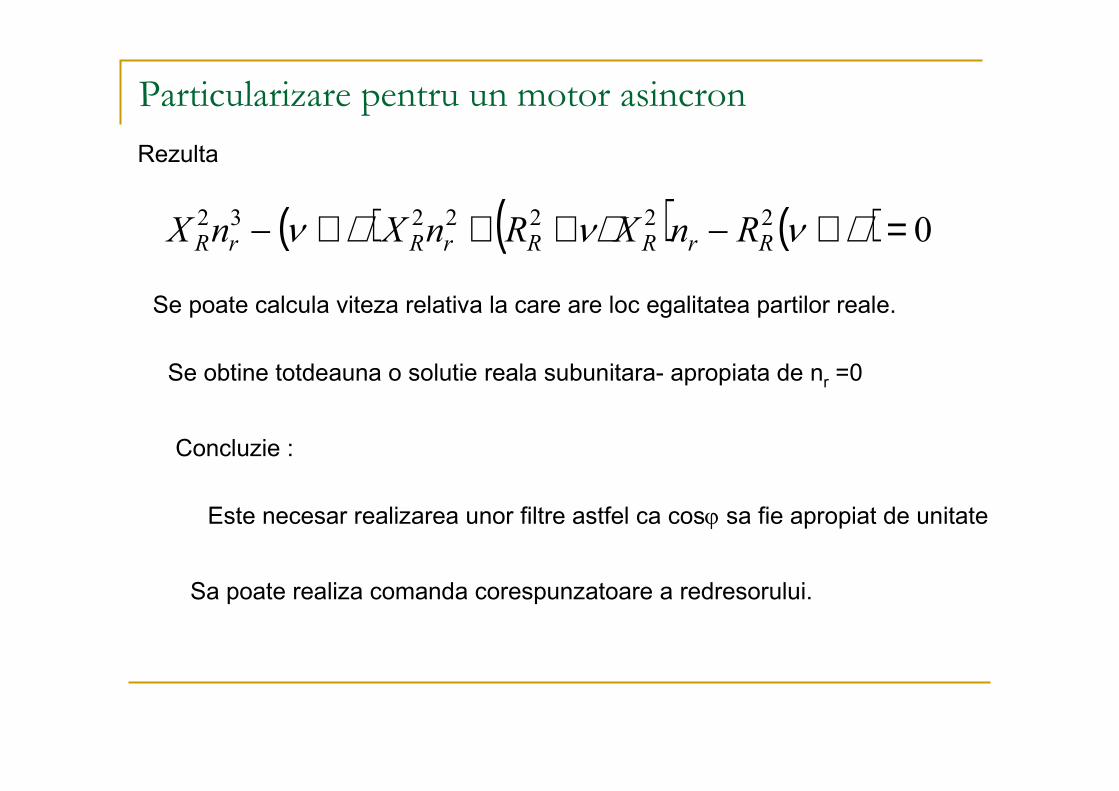
Particularizare pentru un motor asincronRezulta
( ) ( ) ( ) 02222232 =+−+++− µννµµν RrRRrRrR RnXRnXnX
Se poate calcula viteza relativa la care are loc egalitatea partilor reale.
Se obtine totdeauna o solutie reala subunitara- apropiata de nr =0
Concluzie :
Este necesar realizarea unor filtre astfel ca cosϕ sa fie apropiat de unitate
Sa poate realiza comanda corespunzatoare a redresorului.
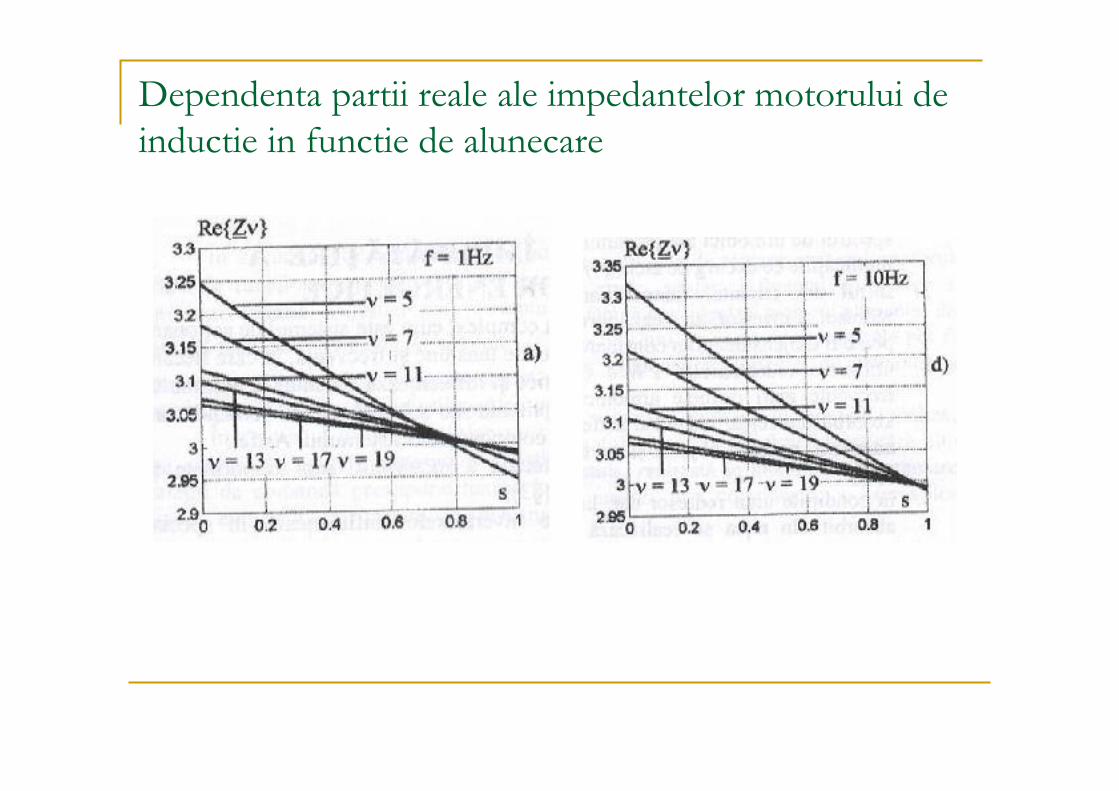
Dependenta partii reale ale impedantelor motorului deinductie in functie de alunecare