5.4. criteriul de stabilitate nyquist...prof. dr. ing. toma l. dragomir, teoria sistemelor ii -...
TRANSCRIPT
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 200
5.4. Criteriul de stabilitate Nyquist 1. Locuri de transfer
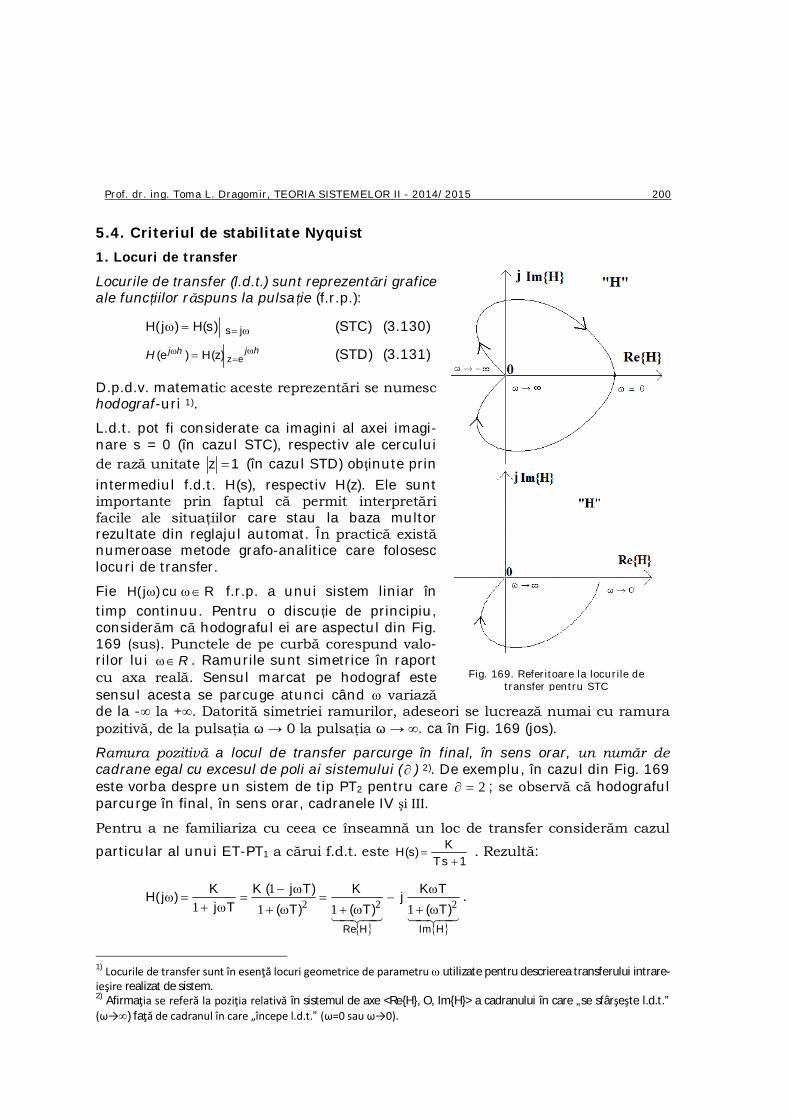
Locurile de transfer (l.d.t.) sunt reprezentări grafice ale funcţiilor răspuns la pulsaţie (f.r.p.):
js)s(H)j(H (STC) (3.130) hjhjH
ezH(z))(e (STD) (3.131)
D.p.d.v. matematic aceste reprezentări se numesc hodograf-uri 1).
L.d.t. pot fi considerate ca imagini al axei imagi-nare s = 0 (în cazul STC), respectiv ale cercului de rază unitate 1z (în cazul STD) obţinute prin intermediul f.d.t. H(s), respectiv H(z). Ele sunt importante prin faptul că permit interpretări facile ale situaţiilor care stau la baza multor rezultate din reglajul automat. În practică există numeroase metode grafo-analitice care folosesc locuri de transfer.
Fie Rcu)j(H f.r.p. a unui sistem liniar în timp continuu. Pentru o discuţie de principiu, considerăm că hodograful ei are aspectul din Fig. 169 (sus). Punctele de pe curbă corespund valo-rilor lui R . Ramurile sunt simetrice în raport cu axa reală. Sensul marcat pe hodograf este sensul acesta se parcuge atunci când variază de la -∞ la +∞. Datorită simetriei ramurilor, adeseori se lucrează numai cu ramura pozitivă, de la pulsaţia ω → 0 la pulsaţia ω → . ca în Fig. 169 (jos).
Ramura pozitivă a locul de transfer parcurge în final, în sens orar, un număr de cadrane egal cu excesul de poli ai sistemului ( ) 2). De exemplu, în cazul din Fig. 169 este vorba despre un sistem de tip PT2 pentru care 2 ; se observă că hodograful parcurge în final, în sens orar, cadranele IV şi III.
Pentru a ne familiariza cu ceea ce înseamnă un loc de transfer considerăm cazul
particular al unui ET-PT1 a cărui f.d.t. este 1sT
KH(s)
. Rezultă:
HImHRe
)T(TKj
)T(K
)T()Tj(K
TjK)j(H 222 111
11
.
1) Locurile de transfer sunt în esenţă locuri geometrice de parametru utilizate pentru descrierea transferului intrare-ieşire realizat de sistem. 2) Afirmaţia se referă la poziţia relativă în sistemul de axe <Re{H}, O, Im{H}> a cadranului în care „se sfârşeşte l.d.t.” (ω→) faţă de cadranul în care „începe l.d.t.” (ω=0 sau ω→0).
Fig. 169. Referitoare la locurile de transfer pentru STC
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 201
Se observă că 2
22
22
KHImKHRe .
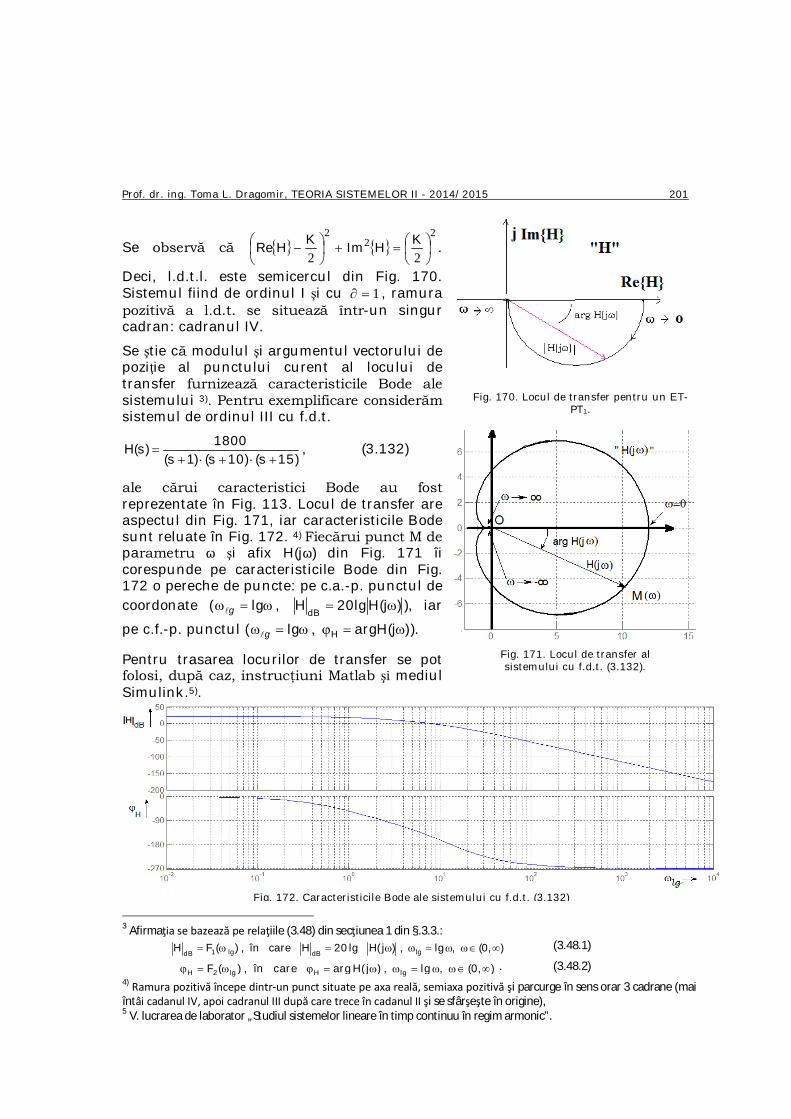
Deci, l.d.t.l. este semicercul din Fig. 170. Sistemul fiind de ordinul I şi cu 1 , ramura pozitivă a l.d.t. se situează într-un singur cadran: cadranul IV.
Se ştie că modulul şi argumentul vectorului de poziţie al punctului curent al locului de transfer furnizează caracteristicile Bode ale sistemului 3). Pentru exemplificare considerăm sistemul de ordinul III cu f.d.t.
)15s()10s()1s(1800)s(H
, (3.132)
ale cărui caracteristici Bode au fost reprezentate în Fig. 113. Locul de transfer are aspectul din Fig. 171, iar caracteristicile Bode sunt reluate în Fig. 172. 4) Fiecărui punct M de parametru ω şi afix H(jω) din Fig. 171 îi corespunde pe caracteristicile Bode din Fig. 172 o pereche de puncte: pe c.a.-p. punctul de coordonate ( lgg , )H(j20lgHdB ), iar
pe c.f.-p. punctul ( lgg , )argH(jH ).
Pentru trasarea locurilor de transfer se pot folosi, după caz, instrucţiuni Matlab şi mediul Simulink.5).
3 Afirmaţia se bazează pe relaţiile (3.48) din secţiunea 1 din §.3.3.:
1 lg lgdB dBH F ( ) , în care H 20lg H( j ) , lg , (0, ) (3.48.1)
H 2 lg H lgF ( ) , în care arg H( j ) , lg , (0, ) . (3.48.2) 4) Ramura pozitivă începe dintr-un punct situate pe axa reală, semiaxa pozitivă şi parcurge în sens orar 3 cadrane (mai întâi cadanul IV, apoi cadranul III după care trece în cadanul II şi se sfârşeşte în origine), 5 V. lucrarea de laborator „Studiul sistemelor lineare în timp continuu în regim armonic”.
Fig. 171. Locul de transfer al sistemului cu f.d.t. (3.132).
Fig. 172. Caracteristicile Bode ale sistemului cu f.d.t. (3.132)
Fig. 170. Locul de transfer pentru un ET-PT1.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 202
Pentru STD l.d.t. apar formal ca şi pentru sistemele in timp continuu. De regulă alurile sunt mai sofisticate.
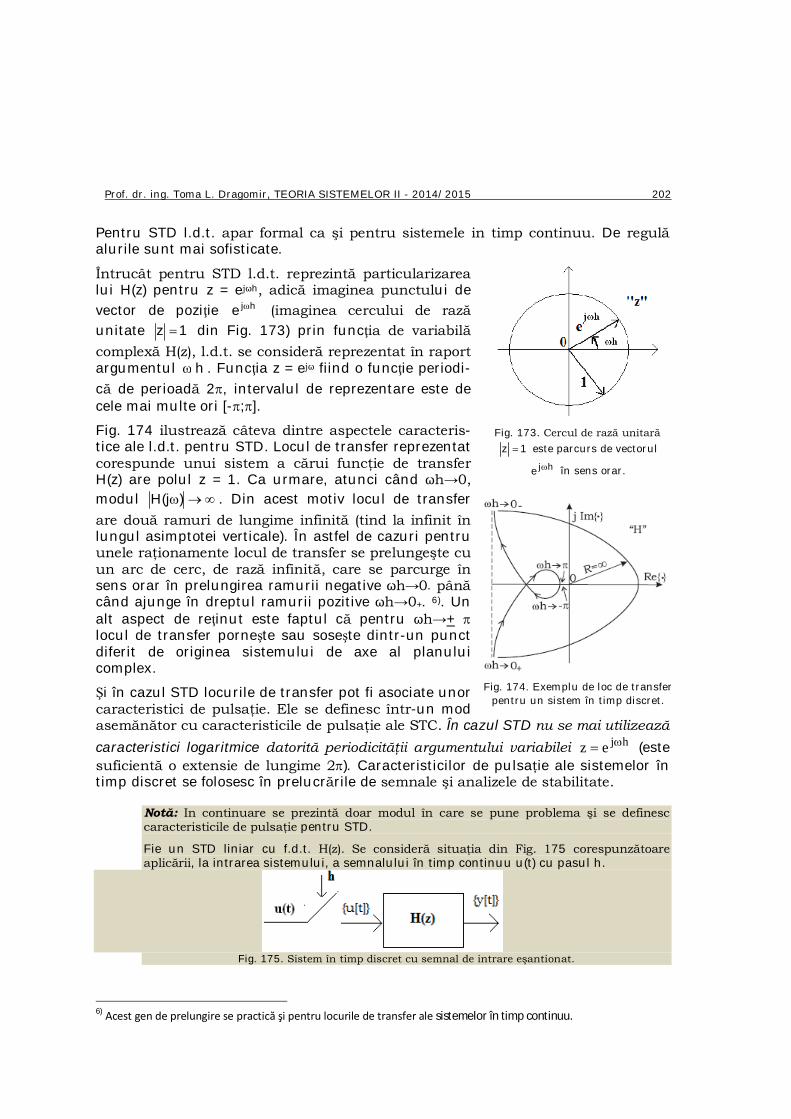
Întrucât pentru STD l.d.t. reprezintă particularizarea lui H(z) pentru z = ejωh, adică imaginea punctului de vector de poziţie hje (imaginea cercului de rază unitate 1z din Fig. 173) prin funcţia de variabilă complexă H(z), l.d.t. se consideră reprezentat în raport argumentul h . Funcţia z = ejω fiind o funcţie periodi-că de perioadă 2, intervalul de reprezentare este de cele mai multe ori [-;].
Fig. 174 ilustrează câteva dintre aspectele caracteris-tice ale l.d.t. pentru STD. Locul de transfer reprezentat corespunde unui sistem a cărui funcţie de transfer H(z) are polul z = 1. Ca urmare, atunci când ωh→0, modul )H(j . Din acest motiv locul de transfer are două ramuri de lungime infinită (tind la infinit în lungul asimptotei verticale). În astfel de cazuri pentru unele raţionamente locul de transfer se prelungeşte cu un arc de cerc, de rază infinită, care se parcurge în sens orar în prelungirea ramurii negative ωh→0- până când ajunge în dreptul ramurii pozitive ωh→0+. 6). Un alt aspect de reţinut este faptul că pentru ωh→+ locul de transfer porneşte sau soseşte dintr-un punct diferit de originea sistemului de axe al planului complex.
Şi în cazul STD locurile de transfer pot fi asociate unor caracteristici de pulsaţie. Ele se definesc într-un mod asemănător cu caracteristicile de pulsaţie ale STC. În cazul STD nu se mai utilizează caracteristici logaritmice datorită periodicităţii argumentului variabilei hjez (este suficientă o extensie de lungime 2). Caracteristicilor de pulsaţie ale sistemelor în timp discret se folosesc în prelucrările de semnale şi analizele de stabilitate.
Notă: In continuare se prezintă doar modul în care se pune problema şi se definesc caracteristicile de pulsaţie pentru STD.
Fie un STD liniar cu f.d.t. H(z). Se consideră situaţia din Fig. 175 corespunzătoare aplicării, la intrarea sistemului, a semnalului în timp continuu u(t) cu pasul h.
Fig. 175. Sistem în timp discret cu semnal de intrare eşantionat.
6) Acest gen de prelungire se practică şi pentru locurile de transfer ale sistemelor în timp continuu.
Fig. 173. Cercul de rază unitară 1z este parcurs de vectorul
hje în sens orar.
Fig. 174. Exemplu de loc de transfer pentru un sistem în timp discret.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 203
Prin eşantionare se obţine secvenţa {u[t]}, care produce la ieşirea sistemului secvenţa de ieşire {y[t]}.
Pentru studiul acestei situaţii din perspectiva caracteristicilor de pulsaţie se foloseşte funcţia de răspuns la pulsaţie (3.131):
)hjjargH(ehjhjez
hj e)H(eH(z))H(e
, h ,
unde este un interval de lungime egală cu 2 (v. Fig. 173), de exemplu ],[ sau ],[ 20 .
Presupunem că semnalul de intrare u(t) este un semnal sinusoidal de forma t)sin(Uu(t) o ω (aici t este „timp continuu”). Atunci, prin discretizare semnalului la
momentele hkt , (N)sauZk , rezultă secvenţa {u[k]}kZ sau N, cu (N)sauZhh),ksin(Uh)u(ku[k] o ω 7).
La fel ca şi pentru sistemele in timp continuu, se demonstrează că în regim permanent armonic la ieşirea sistemului cu funcţia de transfer H(z) apare secvenţa de valori {y[k]}, cu:
))argH(ehksin()H(eUy[k] hj
oY
hjo
ω . (3.133.1)
Relaţia (3.133.1) este similară cu relaţia (3.55), din cazul STC, şi permite introducerea următoarelor două caracteristicilor de pulsaţie (c.a-p şi c.f-p):
h)(f)argH(e
h)(f)H(eUY
2hj
1hj
o
o
ω
ω
ω (3.133.2)
Pentru reprezentarea grafică a celor două caracteristici de pulsaţie (3.133.2), pe abscisă se ia doar un interval de lungime 2, h .
2. Criteriul de stabilitate Nyquist
Criteriul Nyquist stă la baza a numeroase metode de analiză şi sinteză din ingineria reglării. El se referă la structura în circuit închis cu reacţie unitară negativă din Fig. 176 (schema canonică pentru criteriul Nyquist). (s)Η~ este funcţia de transfer a sistemului deschis.
Fig. 176. Structura canonică pentru aplicarea criteriului de stabilitate Nyquist.
Întrucât criteriul de stabilitate Nyquist operează cu funcţia răspuns la pulsaţie )(j~ , el este un criteriu de stabilitate frecvenţial.
Notă: In principiu, orice structură de reglare poate fi asimilată cu structura din Fig. 176. Pentru exemplificare considerăm sistemul din Fig.177 în idea că ne interesează să
7) u(kh) se mai notează şi cu u[k].
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 204
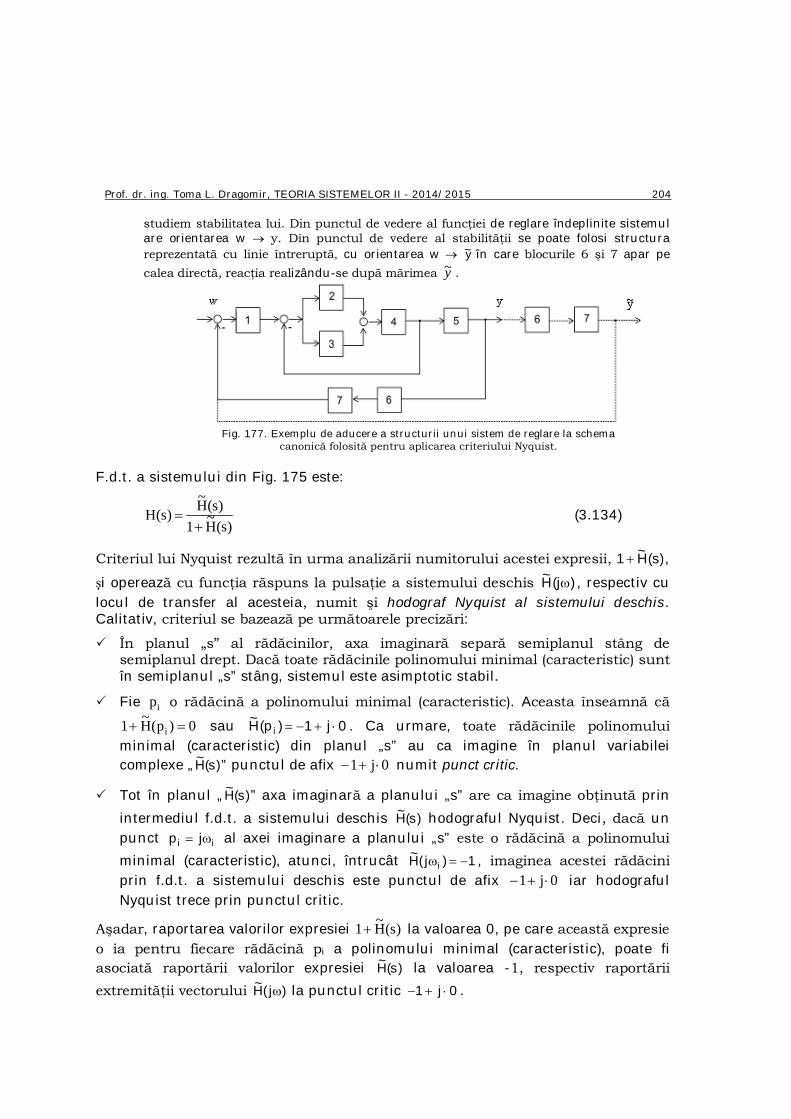
studiem stabilitatea lui. Din punctul de vedere al funcţiei de reglare îndeplinite sistemul are orientarea w y. Din punctul de vedere al stabilităţii se poate folosi structura reprezentată cu linie întreruptă, cu orientarea w y~ în care blocurile 6 şi 7 apar pe calea directă, reacţia realizându-se după mărimea y~ .
Fig. 177. Exemplu de aducere a structurii unui sistem de reglare la schema
canonică folosită pentru aplicarea criteriului Nyquist.
F.d.t. a sistemului din Fig. 175 este:
)s(H~1)s(H~)s(H
(3.134)
Criteriul lui Nyquist rezultă în urma analizării numitorului acestei expresii, (s)H1 ~ ,
şi operează cu funcţia răspuns la pulsaţie a sistemului deschis )(jH ~ , respectiv cu locul de transfer al acesteia, numit şi hodograf Nyquist al sistemului deschis. Calitativ, criteriul se bazează pe următoarele precizări:
În planul „s” al rădăcinilor, axa imaginară separă semiplanul stâng de semiplanul drept. Dacă toate rădăcinile polinomului minimal (caracteristic) sunt în semiplanul „s” stâng, sistemul este asimptotic stabil.
Fie ip o rădăcină a polinomului minimal (caracteristic). Aceasta înseamnă că
0)p(H~1 i sau 0j1)(pH i ~ . Ca urmare, toate rădăcinile polinomului minimal (caracteristic) din planul „s” au ca imagine în planul variabilei complexe „ )s(H~ ” punctul de afix 0j1 numit punct critic.
Tot în planul „ )s(H~ ” axa imaginară a planului „s” are ca imagine obţinută prin intermediul f.d.t. a sistemului deschis )s(H~ hodograful Nyquist. Deci, dacă un punct ii jp al axei imaginare a planului „s” este o rădăcină a polinomului minimal (caracteristic), atunci, întrucât 1)j(H~ i , imaginea acestei rădăcini prin f.d.t. a sistemului deschis este punctul de afix 0j1 iar hodograful Nyquist trece prin punctul critic.
Aşadar, raportarea valorilor expresiei )s(H~1 la valoarea 0, pe care această expresie o ia pentru fiecare rădăcină pi a polinomului minimal (caracteristic), poate fi asociată raportării valorilor expresiei )s(H~ la valoarea -1, respectiv raportării extremităţii vectorului )j(H~ la punctul critic 0j1 .
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 205
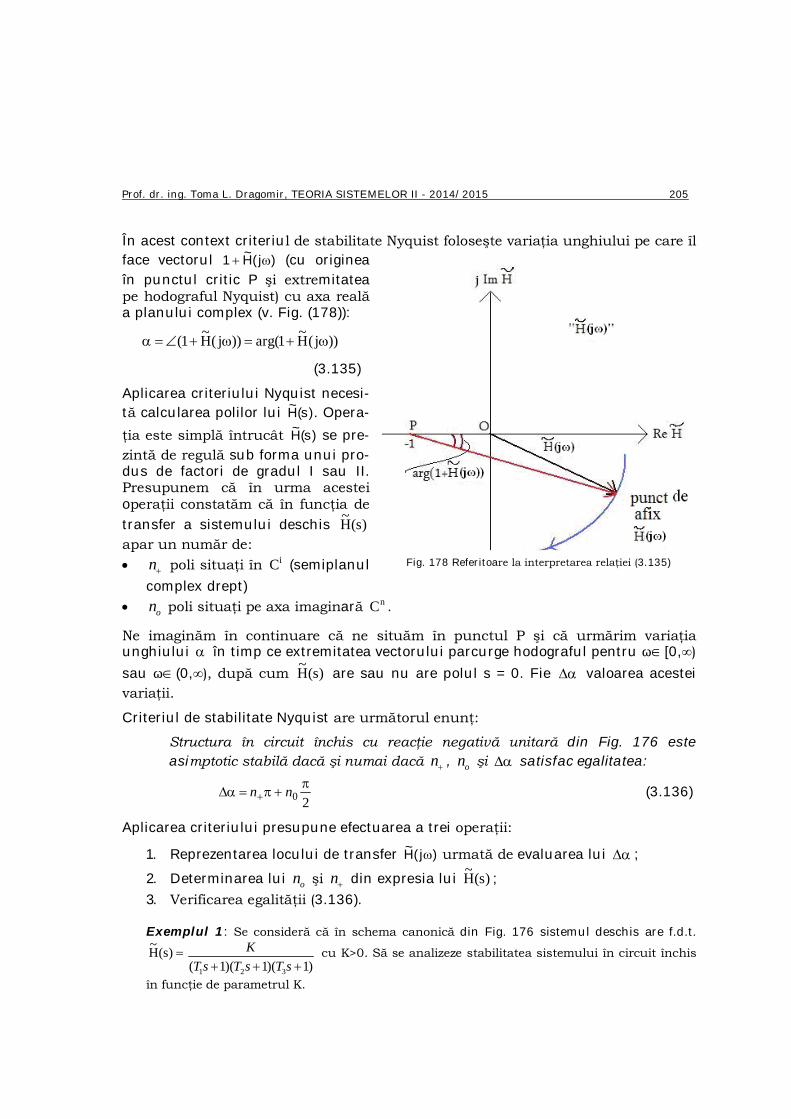
În acest context criteriul de stabilitate Nyquist foloseşte variaţia unghiului pe care îl face vectorul )j(H~1 (cu originea în punctul critic P şi extremitatea pe hodograful Nyquist) cu axa reală a planului complex (v. Fig. (178)):
))j(H~1arg())j(H~1(
(3.135)
Aplicarea criteriului Nyquist necesi-tă calcularea polilor lui )s(H~ . Opera-ţia este simplă întrucât )s(H~ se pre-zintă de regulă sub forma unui pro-dus de factori de gradul I sau II. Presupunem că în urma acestei operaţii constatăm că în funcţia de transfer a sistemului deschis )s(H~ apar un număr de: n poli situaţi în iC (semiplanul
complex drept) on poli situaţi pe axa imaginară nC .
Ne imaginăm în continuare că ne situăm în punctul P şi că urmărim variaţia unghiului în timp ce extremitatea vectorului parcurge hodograful pentru ω [0,∞) sau ω (0,∞), după cum )s(H~ are sau nu are polul s = 0. Fie valoarea acestei variaţii.
Criteriul de stabilitate Nyquist are următorul enunţ:
Structura în circuit închis cu reacţie negativă unitară din Fig. 176 este asimptotic stabilă dacă şi numai dacă n , on şi satisfac egalitatea:
20
nn (3.136)
Aplicarea criteriului presupune efectuarea a trei operaţii:
1. Reprezentarea locului de transfer )j(H~ urmată de evaluarea lui ;
2. Determinarea lui on şi n din expresia lui )s(H~ ; 3. Verificarea egalităţii (3.136).
Exemplul 1: Se consideră că în schema canonică din Fig. 176 sistemul deschis are f.d.t.
)s(H~
1 2 3( 1)( 1)( 1)K
T s T s T s cu K>0. Să se analizeze stabilitatea sistemului în circuit închis
în funcţie de parametrul K.
Fig. 178 Referitoare la interpretarea relaţiei (3.135)
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 206
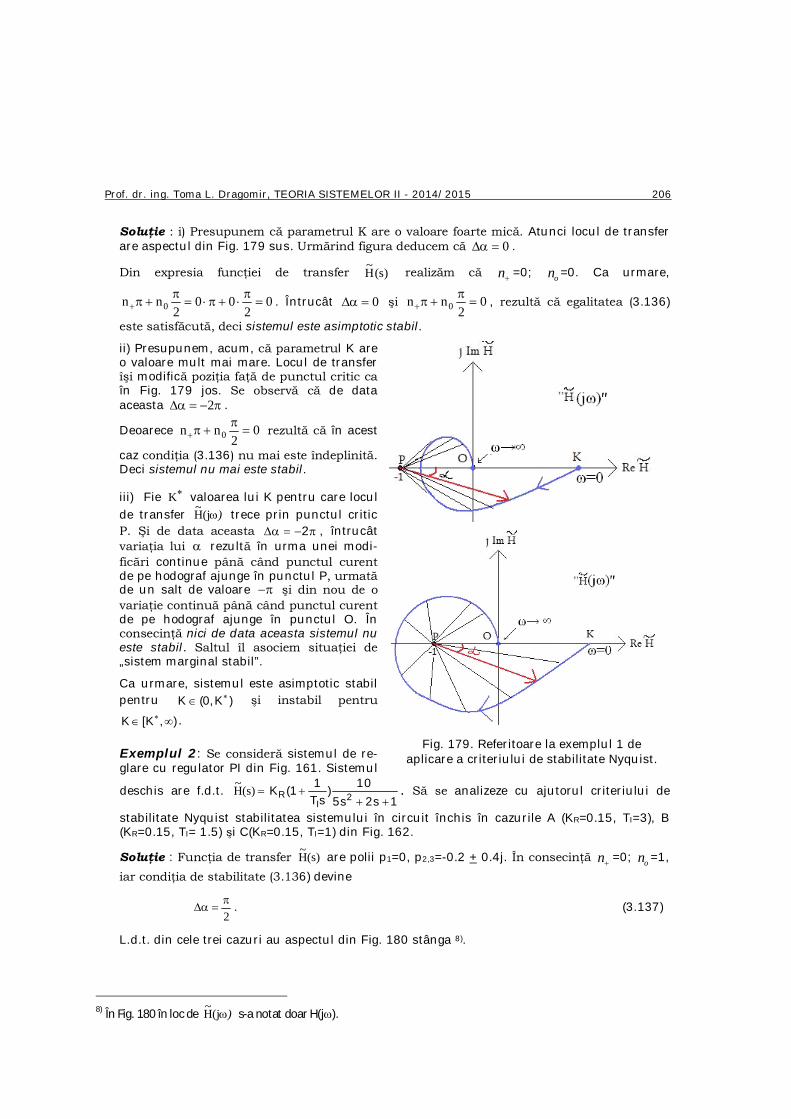
Soluţie : i) Presupunem că parametrul K are o valoare foarte mică. Atunci locul de transfer are aspectul din Fig. 179 sus. Urmărind figura deducem că 0 .
Din expresia funcţiei de transfer )s(H~ realizăm că n =0; on =0. Ca urmare,
02
002
nn 0 . Întrucât 0 şi 02
nn 0 , rezultă că egalitatea (3.136)
este satisfăcută, deci sistemul este asimptotic stabil.
ii) Presupunem, acum, că parametrul K are o valoare mult mai mare. Locul de transfer îşi modifică poziţia faţă de punctul critic ca în Fig. 179 jos. Se observă că de data aceasta 2 .
Deoarece 02
nn 0 rezultă că în acest
caz condiţia (3.136) nu mai este îndeplinită. Deci sistemul nu mai este stabil.
iii) Fie K valoarea lui K pentru care locul de transfer )~
(jH trece prin punctul critic P. Şi de data aceasta 2 , întrucât variaţia lui rezultă în urma unei modi-ficări continue până când punctul curent de pe hodograf ajunge în punctul P, urmată de un salt de valoare şi din nou de o variaţie continuă până când punctul curent de pe hodograf ajunge în punctul O. În consecinţă nici de data aceasta sistemul nu este stabil. Saltul îl asociem situaţiei de „sistem marginal stabil”.
Ca urmare, sistemul este asimptotic stabil pentru )K,0(K şi instabil pentru
),[KK . Exemplul 2: Se consideră sistemul de re-glare cu regulator PI din Fig. 161. Sistemul
deschis are f.d.t. (s)H~12s5s
10)sT
1(1K 2I
R
. Să se analizeze cu ajutorul criteriului de
stabilitate Nyquist stabilitatea sistemului în circuit închis în cazurile A (KR=0.15, TI=3), B (KR=0.15, TI= 1.5) şi C(KR=0.15, TI=1) din Fig. 162.
Soluţie : Funcţia de transfer (s)H~ are polii p1=0, p2,3=-0.2 + 0.4j. În consecinţă n =0; on =1, iar condiţia de stabilitate (3.136) devine
2
. (3.137)
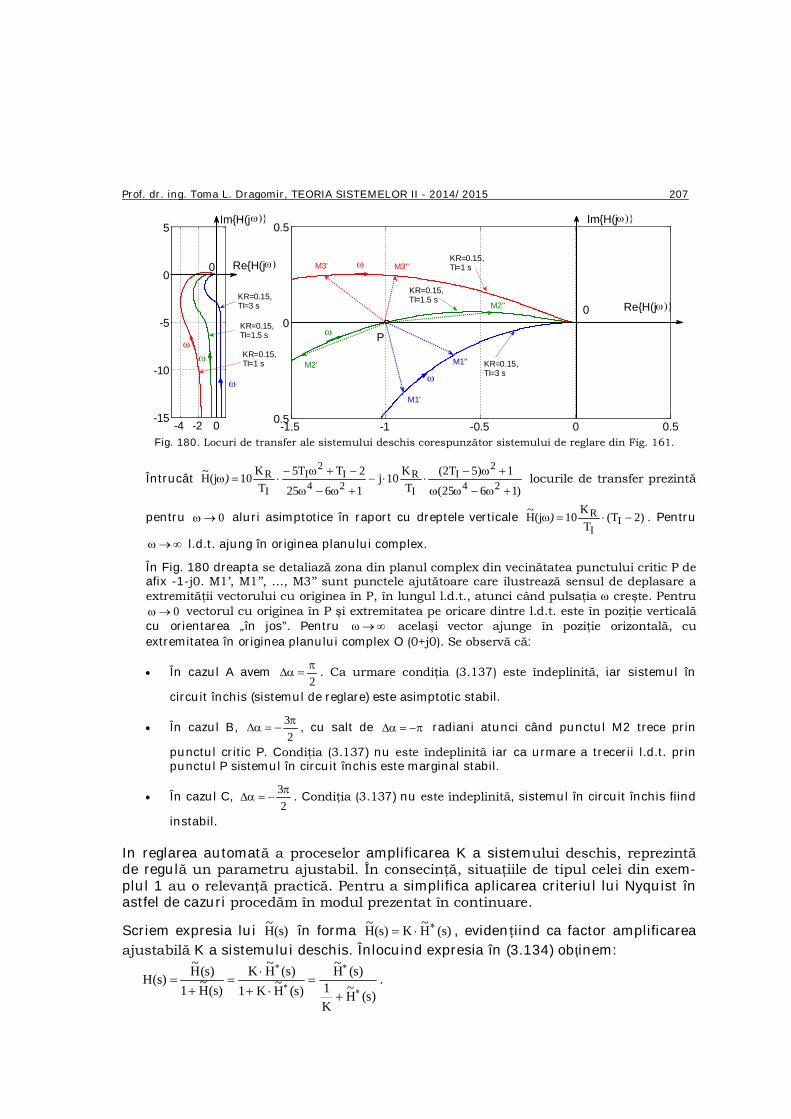
L.d.t. din cele trei cazuri au aspectul din Fig. 180 stânga 8).
8) În Fig. 180 în loc de )~
(jH s-a notat doar H(j).
Fig. 179. Referitoare la exemplul 1 de aplicare a criteriului de stabilitate Nyquist.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 207
Întrucât )(
5)(2TT
K0jTTT
K0(jH IIRII
IR
1625
111625
25124
2
24
2
)~ locurile de transfer prezintă
pentru 0 aluri asimptotice în raport cu dreptele verticale )(TT
K0(jH I
IR 21 )~ . Pentru
l.d.t. ajung în originea planului complex.
În Fig. 180 dreapta se detaliază zona din planul complex din vecinătatea punctului critic P de afix -1-j0. M1’, M1’’, …, M3’’ sunt punctele ajutătoare care ilustrează sensul de deplasare a extremităţii vectorului cu originea în P, în lungul l.d.t., atunci când pulsaţia creşte. Pentru
0 vectorul cu originea în P şi extremitatea pe oricare dintre l.d.t. este în poziţie verticală cu orientarea „în jos”. Pentru acelaşi vector ajunge în poziţie orizontală, cu extremitatea în originea planului complex O (0+j0). Se observă că:
În cazul A avem 2
. Ca urmare condiţia (3.137) este îndeplinită, iar sistemul în
circuit închis (sistemul de reglare) este asimptotic stabil.
În cazul B, 2
3 , cu salt de radiani atunci când punctul M2 trece prin
punctul critic P. Condiţia (3.137) nu este îndeplinită iar ca urmare a trecerii l.d.t. prin punctul P sistemul în circuit închis este marginal stabil.
În cazul C, 2
3 . Condiţia (3.137) nu este îndeplinită, sistemul în circuit închis fiind
instabil. In reglarea automată a proceselor amplificarea K a sistemului deschis, reprezintă de regulă un parametru ajustabil. În consecinţă, situaţiile de tipul celei din exem-plul 1 au o relevanţă practică. Pentru a simplifica aplicarea criteriul lui Nyquist în astfel de cazuri procedăm în modul prezentat în continuare.
Scriem expresia lui (s)H~ în forma (s)HK(s)H ~~ , evidenţiind ca factor amplificarea
ajustabilă K a sistemului deschis. Înlocuind expresia în (3.134) obţinem:
)s(H~
K1
)s(H~
)s(H~K1)s(H~K
)s(H~1)s(H~)s(H
.
Fig. 180. Locuri de transfer ale sistemului deschis corespunzător sistemului de reglare din Fig. 161. -4 -2 0
-15
-10
-5
0
5
0
Im{H(j
Re{H(j
KR=0.15,TI=3 s
KR=0.15,TI=1.5 s
KR=0.15,TI=1 s
-1.5 -1 -0.5 0 0.5-0.5
0
0.5
KR=0.15,TI=1.5 s
Im{H(j
Re{H(j
KR=0.15,TI=3 s
KR=0.15,TI=1 s
P
0
M1'
M1''M2'
M2''
M3' M3''
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 208
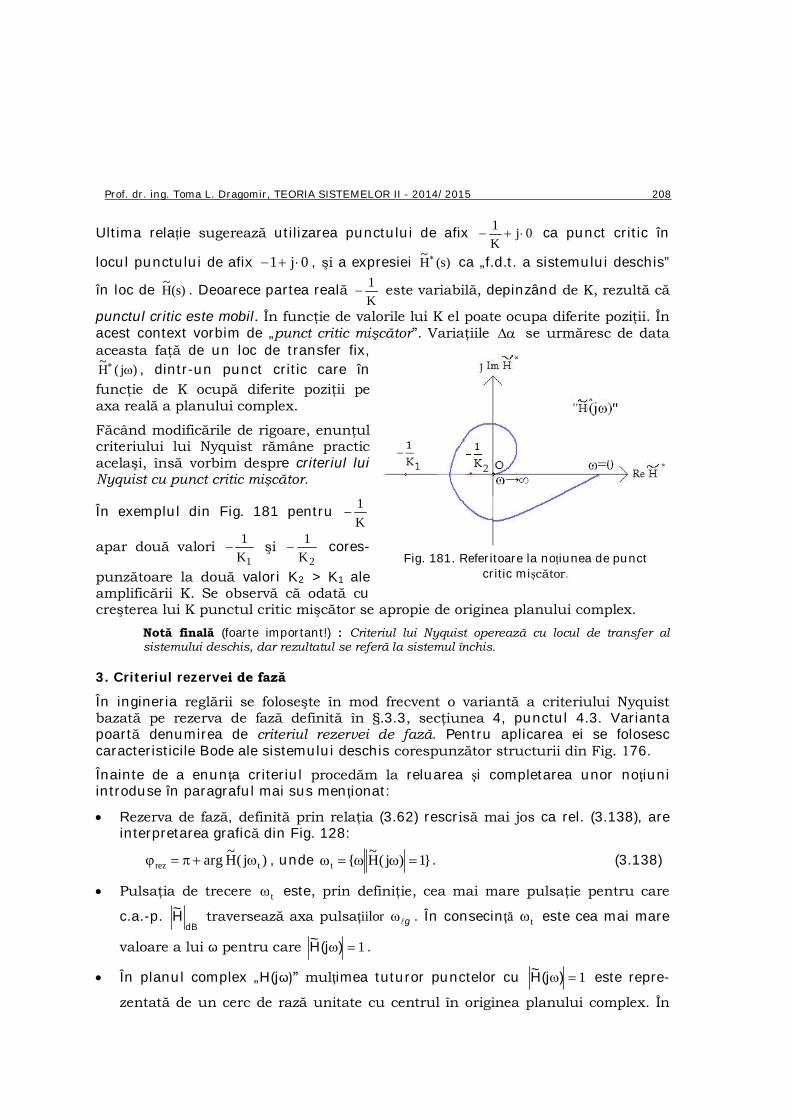
Ultima relație sugerează utilizarea punctului de afix 0jK1 ca punct critic în
locul punctului de afix 0j1 , şi a expresiei )s(H~ ca „f.d.t. a sistemului deschis”
în loc de (s)H~ . Deoarece partea reală K1 este variabilă, depinzând de K, rezultă că
punctul critic este mobil. În funcţie de valorile lui K el poate ocupa diferite poziţii. În acest context vorbim de „punct critic mişcător”. Variaţiile se urmăresc de data aceasta faţă de un loc de transfer fix,
)j(H~ , dintr-un punct critic care în funcţie de K ocupă diferite poziţii pe axa reală a planului complex.
Făcând modificările de rigoare, enunţul criteriului lui Nyquist rămâne practic acelaşi, însă vorbim despre criteriul lui Nyquist cu punct critic mişcător.
În exemplul din Fig. 181 pentru K1
apar două valori 1K
1 şi
2K1
cores-
punzătoare la două valori K2 > K1 ale amplificării K. Se observă că odată cu creşterea lui K punctul critic mişcător se apropie de originea planului complex.
Notă finală (foarte important!) : Criteriul lui Nyquist operează cu locul de transfer al sistemului deschis, dar rezultatul se referă la sistemul închis.
3. Criteriul rezervei de fază
În ingineria reglării se foloseşte în mod frecvent o variantă a criteriului Nyquist bazată pe rezerva de fază definită în §.3.3, secţiunea 4, punctul 4.3. Varianta poartă denumirea de criteriul rezervei de fază. Pentru aplicarea ei se folosesc caracteristicile Bode ale sistemului deschis corespunzător structurii din Fig. 176.
Înainte de a enunţa criteriul procedăm la reluarea şi completarea unor noţiuni introduse în paragraful mai sus menţionat:
Rezerva de fază, definită prin relaţia (3.62) rescrisă mai jos ca rel. (3.138), are interpretarea grafică din Fig. 128:
)j(H~arg trez , unde }1)j(H~{t . (3.138)
Pulsaţia de trecere t este, prin definiţie, cea mai mare pulsaţie pentru care
c.a.-p. dB
H~ traversează axa pulsaţiilor g . În consecinţă t este cea mai mare
valoare a lui ω pentru care 1)(jH~ .
În planul complex „H(jω)” mulţimea tuturor punctelor cu 1)(jH~ este repre-
zentată de un cerc de rază unitate cu centrul în originea planului complex. În
Fig. 181. Referitoare la noțiunea de punct critic mișcător.
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 209
consecinţă punctul de pe locul de transfer cu ω = ωt este punctul pentru care l.d.t. traversează pentru ultima oară cercul de rază unitate 1)(jH~ . Convenim
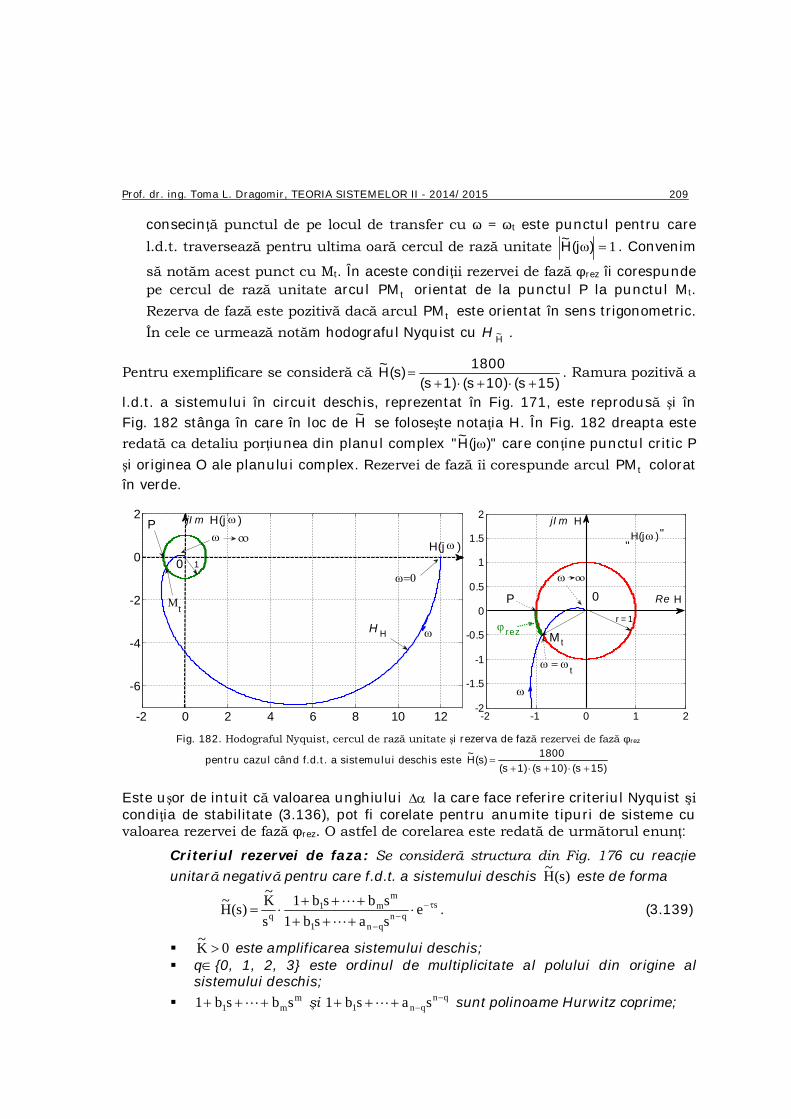
să notăm acest punct cu Mt. În aceste condiţii rezervei de fază φrez îi corespunde pe cercul de rază unitate arcul tPM orientat de la punctul P la punctul Mt. Rezerva de fază este pozitivă dacă arcul tPM este orientat în sens trigonometric. În cele ce urmează notăm hodograful Nyquist cu H ~H .
Pentru exemplificare se consideră că 15)(s10)(s1)(s
1800(s)H
~ . Ramura pozitivă a
l.d.t. a sistemului în circuit deschis, reprezentat în Fig. 171, este reprodusă şi în Fig. 182 stânga în care în loc de H~ se foloseşte notaţia H. În Fig. 182 dreapta este redată ca detaliu porţiunea din planul complex )"(jH" ~ care conţine punctul critic P şi originea O ale planului complex. Rezervei de fază îi corespunde arcul tPM colorat în verde.
Este uşor de intuit că valoarea unghiului la care face referire criteriul Nyquist şi condiţia de stabilitate (3.136), pot fi corelate pentru anumite tipuri de sisteme cu valoarea rezervei de fază φrez. O astfel de corelarea este redată de următorul enunţ:
Criteriul rezervei de faza: Se consideră structura din Fig. 176 cu reacţie unitară negativă pentru care f.d.t. a sistemului deschis )s(H~ este de forma
sqn
qn1
mm1
q esasb1sbsb1
sK~)s(H~
. (3.139)
0K~ este amplificarea sistemului deschis; q{0, 1, 2, 3} este ordinul de multiplicitate al polului din origine al
sistemului deschis; m
m1 sbsb1 şi qnqn1 sasb1
sunt polinoame Hurwitz coprime;
-2 -1 0 1 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0
t
P Re
jIm
H
M t
rez
HH(j ) "
"
r = 1
-2 0 2 4 6 8 10 12
-6
-4
-2
0
2
t
P
0
jIm H(j )
H(j )
HH
1
Fig. 182. Hodograful Nyquist, cercul de rază unitate și rezerva de fază rezervei de fază φrez
pentru cazul când f.d.t. a sistemului deschis este 15)(s10)(s1)(s
1800(s)H
~
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 210
m < n (partea raţională a lui )s(H~ este strict proprie) > 0 (timpul mort echivalent al sistemului deschis).
Structura este asimptotic stabilă dacă şi numai dacă 0rez . (3.140)
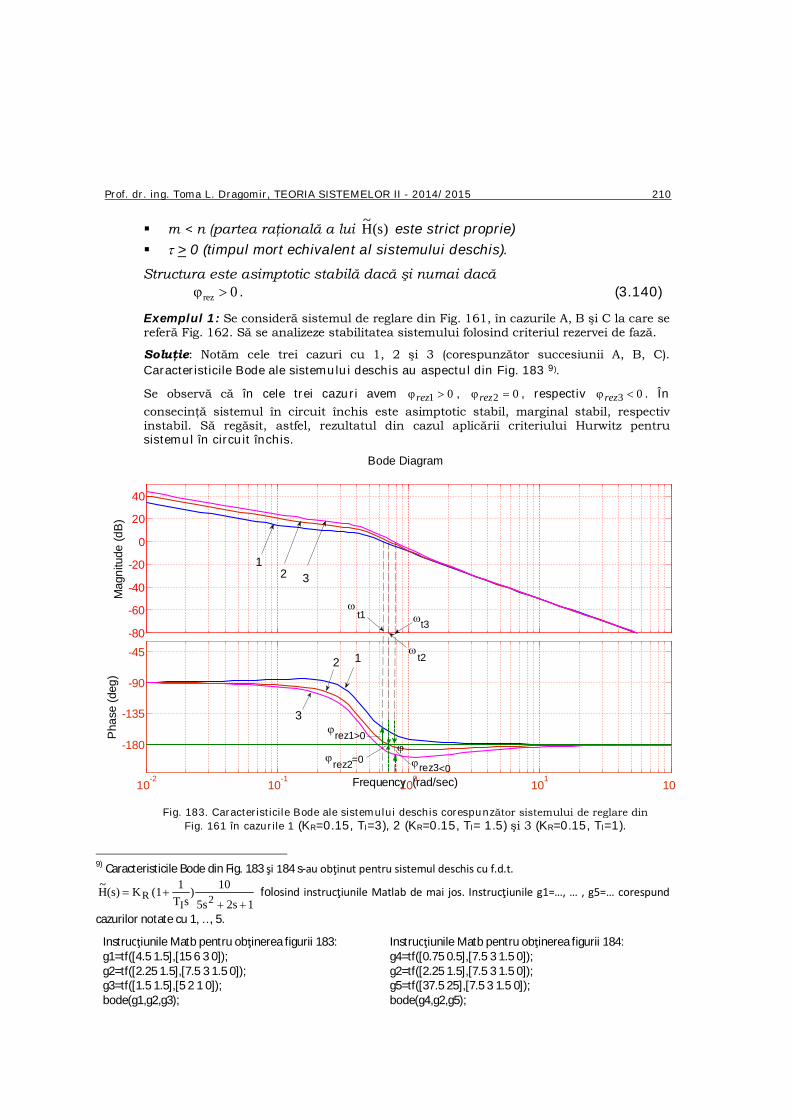
Exemplul 1: Se consideră sistemul de reglare din Fig. 161, în cazurile A, B şi C la care se referă Fig. 162. Să se analizeze stabilitatea sistemului folosind criteriul rezervei de fază.
Soluţie: Notăm cele trei cazuri cu 1, 2 şi 3 (corespunzător succesiunii A, B, C). Caracteristicile Bode ale sistemului deschis au aspectul din Fig. 183 9).
Se observă că în cele trei cazuri avem 01 rez , 02 rez , respectiv 03 rez . În consecinţă sistemul în circuit închis este asimptotic stabil, marginal stabil, respectiv instabil. Să regăsit, astfel, rezultatul din cazul aplicării criteriului Hurwitz pentru sistemul în circuit închis.
9) Caracteristicile Bode din Fig. 183 şi 184 s-au obţinut pentru sistemul deschis cu f.d.t.
12s5s
10)sT
1(1K(s)H2I
R
~ folosind instrucţiunile Matlab de mai jos. Instrucţiunile g1=…, … , g5=… corespund
cazurilor notate cu 1, …, 5.
Instrucţiunile Matb pentru obţinerea figurii 183: g1=tf([4.5 1.5],[15 6 3 0]); g2=tf([2.25 1.5],[7.5 3 1.5 0]); g3=tf([1.5 1.5],[5 2 1 0]); bode(g1,g2,g3);
Instrucţiunile Matb pentru obţinerea figurii 184: g4=tf([0.75 0.5],[7.5 3 1.5 0]); g2=tf([2.25 1.5],[7.5 3 1.5 0]); g5=tf([37.5 25],[7.5 3 1.5 0]); bode(g4,g2,g5);
Fig. 183. Caracteristicile Bode ale sistemului deschis corespunzător sistemului de reglare din Fig. 161 în cazurile 1 (KR=0.15, TI=3), 2 (KR=0.15, TI= 1.5) şi 3 (KR=0.15, TI=1).
-80
-60
-40
-20
0
20
40
Mag
nitu
de (d
B)
10-2
10-1
100
101
102
-180
-135
-90
-45
Pha
se (d
eg)
Bode Diagram
Frequency (rad/sec)
t1
1
1
3
t2
2
2
t3
rez1>0
<0rez2 rez3=0
3
Prof. dr. ing. Toma L. Dragomir, TEORIA SISTEMELOR II - 2014/2015 211
La fel ca şi în cazul discuţiei referitoare la criteriul Hurwitz şi Jury, trebuie să avem în vedere şi în cazul criteriului rezervei de fază incertitudinile privitoare la cunoaşterea exactă a f.d.t. )s(H~ . Faţă de acestea ne asiguram prin modificarea membrului drept din (3.140) sub forma:
9rez . (3.141)
Un alt aspect practic, foarte important, este următorul:
Presupunem că evidenţiem în expresia f.d.t. a sistemului deschis amplificare K a acestuia sub forma: )s(H~K)s(H~ . Atunci, caracteristica fază-pulsaţie a sistemului deschis, H~ , va rămâne aceeaşi indiferent de valoarea lui K, pe când caracteristica
amplitudine-pulsaţie dB
H~ se translatează pe verticală: dacă K creşte, caracteristica
se înalţă, rez scade şi apare tendinţa de instabilitate. Când K scade caracteristica coboară, rez creşte şi apare tendinţa de stabilizare a sistemului închis. Concluzia practică este următoarea: dacă un sistem de reglare prezintă tendinţa de instabilitate, atunci, pentru a-l stabiliza reducem amplificarea sistemului deschis. Acest lucru se face reducând amplificare regulatorului care intră ca factor în amplificarea sistemului deschis.
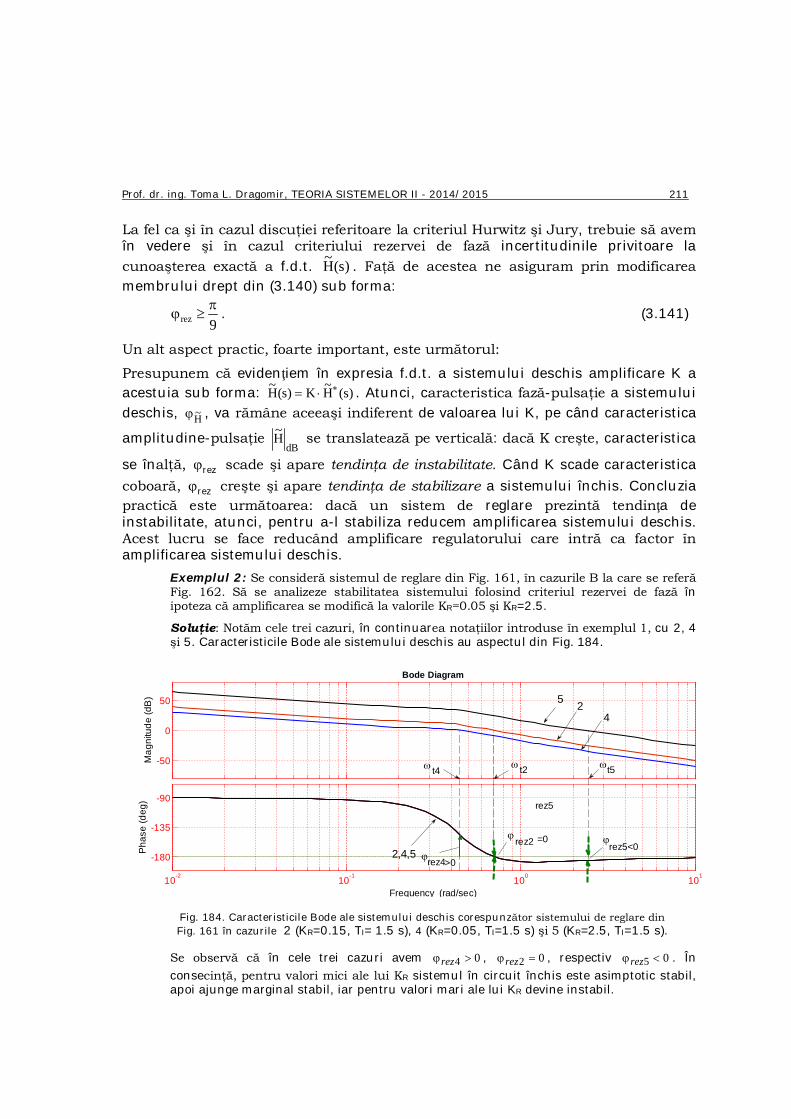
Exemplul 2: Se consideră sistemul de reglare din Fig. 161, în cazurile B la care se referă Fig. 162. Să se analizeze stabilitatea sistemului folosind criteriul rezervei de fază în ipoteza că amplificarea se modifică la valorile KR=0.05 şi KR=2.5.
Soluţie: Notăm cele trei cazuri, în continuarea notaţiilor introduse în exemplul 1, cu 2, 4 şi 5. Caracteristicile Bode ale sistemului deschis au aspectul din Fig. 184.
Se observă că în cele trei cazuri avem 04 rez , 02 rez , respectiv 05 rez . În consecinţă, pentru valori mici ale lui KR sistemul în circuit închis este asimptotic stabil, apoi ajunge marginal stabil, iar pentru valori mari ale lui KR devine instabil.
-50
0
50
Mag
nitu
de (d
B)
10-2 10-1 100 101
-180
-135
-90
Pha
se (d
eg)
Bode Diagram
Frequency (rad/sec)
2,4,5
5
4
t2t4t5
2
rez5
rez5
rez2
=0
rez4>0
<0
Fig. 184. Caracteristicile Bode ale sistemului deschis corespunzător sistemului de reglare din Fig. 161 în cazurile 2 (KR=0.15, TI= 1.5 s), 4 (KR=0.05, TI=1.5 s) şi 5 (KR=2.5, TI=1.5 s).